
Abstract
Pavement network conditions deteriorate over the years of use. To keep pavement conditions at acceptable levels, highway agencies plan pavement maintenance and rehabilitation (M&R) programs and perform accordingly. Highway agencies usually face budget variability for pavement M&R activities because of limited resources, economic conditions, and changes in policies. The situation makes it difficult for highway agencies to keep an acceptable pavement condition at the network level. Therefore, it is important for highway agencies to adopt M&R policies that can maximize the network condition as well as handle the deviation of the network condition considering the available maintenance funds. In this paper, a multi-period multi-objective linear integer programming model is proposed. Two objectives, maximization of the average network condition and minimization of deviation of the network condition from an idealized network condition trend, are considered in the formulation. The model is formulated for fixed M&R budgets, as well as for variable M&R budgets. The proposed model provides an M&R program for the pavement network that helps decision makers to manage pavement maintenance programs considering budgetary constraints. A case study examining a network of 45 pavement sections is conducted. The solutions of the fixed-budget and variable-budget model are presented. In addition, the values of the system to the decision maker are discussed. Results show that the proposed model is an attractive way to manage pavement maintenance programs at the network level.
Keywords
The United States (U.S.) has one of the largest paved roadway networks, providing efficient mobility for both people and freight. Because most of these networks were developed during the construction boom between the 1950s and 1980s, highways show signs of increased deterioration through age and utilization. The current condition of roads in the U.S. is rated as grade D because of current poor conditions ( 1 ). It has been reported that more than 40% of roads in the U.S. have poor or mediocre condition, and underfunding in roadway maintenance and rehabilitation (M&R) over decades has created a significant backlog of rehabilitation needs, which are increasing with time ( 1 ). The deferred M&R has resulted in an $836 billion backlog of highway and capital needs ( 1 ). The estimated investment required for maintenance of highways was around $250 billion in 2017 ( 2 ) and the projected funding shortfall was $66 billion ( 2 ). This poses a challenge to U.S. highway agencies as a result of the wide gap between available resources and the need to maintain and preserve highway pavement infrastructure. It is evident that there is an urgent need for sound planning and efficient management approaches to address the challenges caused by severely constrained resources.
In addition to the present funding scenarios, the U.S. population is expected to increase from 319 million in 2014 to 400 million in 2051 ( 3 ). That means the population would increase by 25% by 2051. The rapid increase in population would result in an incredible increase in demand for freight and passenger transport on highways. For instance, the total vehicle miles traveled (VMT) on public roads in the U.S. increased from 2.9 trillion to 3.25 trillion between 2011 and 2017 ( 4 ). As the current highway infrastructure ages and deteriorates, greater demand will require increased capital investments in maintenance and capacity improvement. This funding primarily comes from the highway trust fund and is based on fuel tax. However, this fund can no longer provide a firm foundation for highway investment needs because of the stagnant state and federal fuel taxes, more fuel-efficient vehicles, and rising construction and maintenance costs. Highway agencies are experiencing funding shortfalls for maintaining and upgrading road infrastructures. Current highway funding scenarios are associated with a high level of uncertainties. The Texas 2030 Committee estimated that funding shortfalls for the state’s pavements and bridges would range from $74 billion to $170 billion from 2011 to 2030 ( 5 ). This makes efficient use of available funding challenging. When funding is limited, pavement M&R activities require proper planning and scheduling. In addition, the current legislative and public protocols require highway agencies to adopt business practices compatible with transportation asset management. A pavement management system (PMS) is the primary tool that supports M&R in this situation. A PMS employs an M&R planning process to achieve the desired level of serviceability given a limited budget ( 6 ).
Background
Optimization models are employed to perform the pavement M&R planning process both at the network level and at the project level. Network-level problems deal with a network of pavement sections for overall planning and budget programming. Project-level programming is applied to an individual project for detailed analysis. Among the optimization models, linear programming models with budget constraints are commonly used ( 7 – 9 ). These models use the Markovian transition probability for prediction of future pavement performance. The problem associated with the linear programming models is that this type of model uses the proportion of the pavement network in various condition states as the decision variable. Therefore, the results obtained from the linear programming models provide the proportion of the pavement network receiving what type of treatment. These models do not assign M&R treatments to individual pavement sections.
To overcome the problem, integer programming or mixed-integer programming models are developed. The integer programming model uses a decision variable that assigns a specific treatment level to a pavement section in the network ( 10 – 14 ). Dynamic programming models are also applied to assist pavement M&R scheduling for multiple years ( 15 , 16 ). Genetic-algorithm-based models are another kind of optimization model used for pavement M&R programming at the network level ( 17 – 19 ). Some models capture the uncertain nature of pavement M&R budget using stochastic optimization, robust optimization, and chance constraint optimization techniques ( 8 , 20–22).
The pavement M&R programming models available in the literature do not capture the multi-objective nature of the problem. Single-objective optimization pavement M&R programming either maximizes or minimizes the most important objective and uses the other criteria as constraints, which may lead to suboptimal programs at the network level. To capture the multi-objective nature of the pavement M&R programming problem at the network level many researchers adopted multi-objective optimization of pavement M&R programming ( 14 , 18 , 23–29). However, the majority of the research efforts with multi-objective optimization only considered maximization of performance and minimization of costs and tried to trade off between performance and cost. It is also important to include the consideration of stability of the pavement condition over the planning horizon so that the condition of the network does not fluctuate significantly. In addition, most of the models assume that decision makers have set aside a specific budget available for M&R. However, current highway funding scenarios make this assumption unrealistic and the actual budget available for pavement M&R can deviate from the nominal value on a year-to-year basis. Thus, models based on a deterministic budget assumption can lead to an inefficient maintenance plan if funding falls short for some years in the planning period. A suboptimal maintenance plan can result in unstable pavement conditions. It is therefore important that the pavement M&R planning model take the random nature of budgets into consideration along with the multiple objectives.
To address these issues, a mixed-integer linear programming model is proposed to support the pavement M&R program at the network level in this study. The proposed model considers the network-level average pavement condition and condition fluctuation as objectives for the maintenance of the pavement network. The proposed model can work with a known pavement M&R budget. In addition, the proposed model has a feature that can capture budget variability over the planning horizon. The budget variability feature uses the concept of uncertainty set in a robust optimization ( 30 – 35 ) methodology to handle fluctuations in the M&R budget.
Problem Statement
Pavement management at the network level is often involved in multiple objectives with uncertainty in available resources. The study proposes an integer linear programming model with two objective functions with both deterministic and variable budget constraints. The main contribution of the proposed model is that it offers a simple optimization framework for pavement maintenance planning with multiple objectives. The proposed integer linear programming model produces a pavement M&R plan for a roadway network over a planning period that satisfies the budget requirement over the planning horizon and pavement condition requirements. The proposed model maximizes the overall network conditions and minimizes the network condition deviation from an idealized network-level condition trend. The overall goal of the proposed model is to manage the network condition over the planning period with efficient use of maintenance budget. The proposed model also captures M&R budget variations and gives flexibility to the decision maker handling the budget variability in a simple way.
Problem Formulation
This section presents the mathematical formulation of the model. First, notations used in the mathematical formulation are described; then the pavement deterioration process is discussed. Finally, the M&R planning model is presented with a deterministic and uncertain budget.
Notations
The sets, parameters, and variables used in the formulation of mathematical models are described in Table 1.
Notations
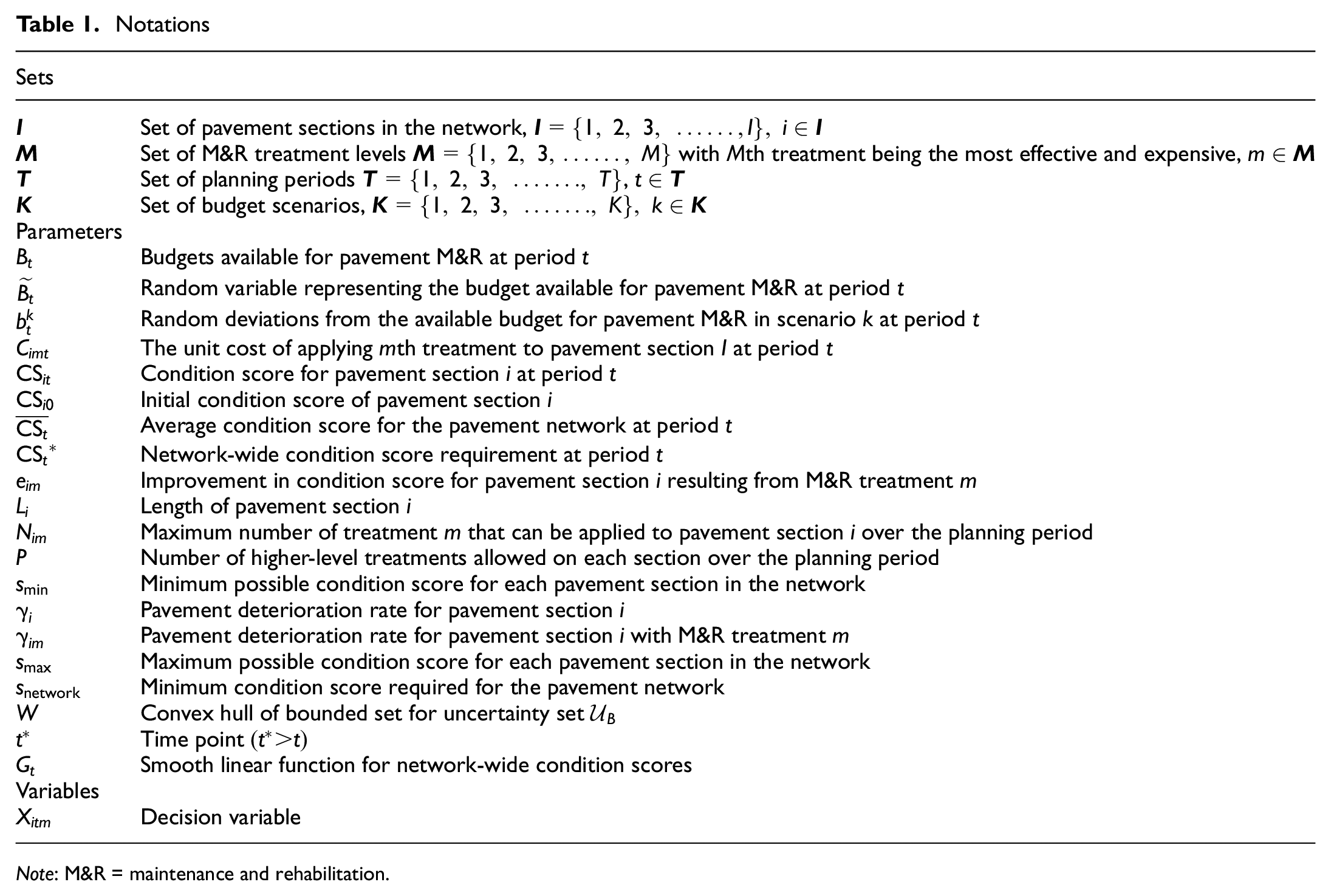
Note: M&R = maintenance and rehabilitation.
Pavement Deterioration and Prediction of Condition Score
A pavement deterioration model should be used to evaluate a pavement network to know when the condition of pavement sections will reach a critical level that requires M&R treatment. In this study, a pavement deterioration model that triggers M&R intervention was adopted from the study of Wang et al. ( 14 ).
The study considers the pavement condition score (CS) as a performance measure for both a pavement section and the pavement network. The condition score is an index that combines ride quality and pavement distress measures to evaluate a pavement with a score ranging from 1 (worst condition) to 100 (best condition). This index is used by the Texas Department of Transportation (TxDOT) ( 36 ).
Pavement condition deterioration and improvement resulting from maintenance intervention are demonstrated in Figure 1:
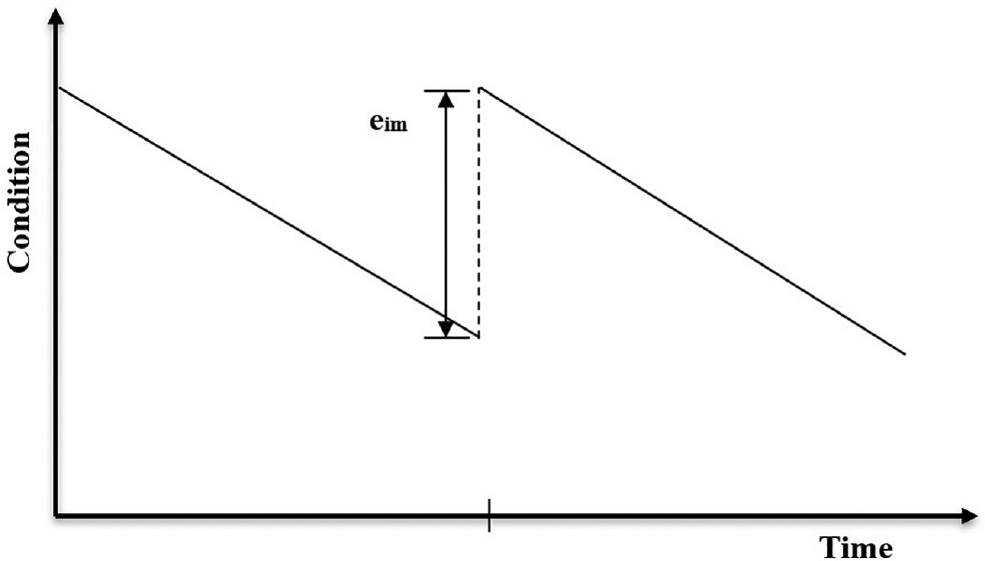
Pavement condition and improvement in condition because of maintenance (
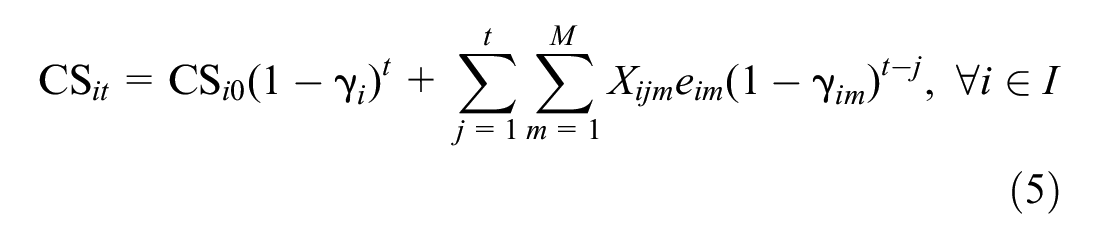
To estimate pavement conditions in the future, an additive condition transition model with constant deterioration rates ( 14 ) is used. As illustrated in Figure 1, when pavement section i is given an M&R treatment at year t, the condition score increases by an amount, eim. A constant rate of deterioration γi for pavement section i can be determined from historical data for that pavement section. If the initial condition score for pavement section i is CSi0, then at a future time t* (t*>t), the condition score for pavement section i can be calculated with Equation 1:

Equation 1 can be established for the pavement deterioration process and calibrated for each pavement section. This equation is used in the proposed optimization model.
M&R Planning Model with Fixed Budget
Consider a pavement network as a set of
The integer linear programming model with a deterministic budget for M&R of the pavement network is formulated considering two objectives:
Maximizing the network-wide condition scores; and
Minimizing the deviation of a network-wide condition score over the planning horizon.
With these objectives, the integer linear programming model is formulated in Equations 2 to 13:

Equation 2 represents the first objective function of the pavement maintenance planning problem and seeks to maximize the network-wide condition score considering the entire planning period. In Equation 2,


Equation 4 represents the budget constraint; that means the total cost of M&R treatments performed over the planning period must be less than or equal to the total budget available over the planning period. The cost of M&R treatment for a pavement section

Constraint (6) ensures that the condition score of any pavement section at any point in time (

Constraint (8) defines the average condition score weighted by length (




Constraint (10) defines the maximum number of treatments allowed (



Constraint (12) ensures that only one maintenance treatment will be applied on a pavement section within a specific planning period. Constraint (13) represents the definition of the decision variable for a pavement section at any period with a specific M&R treatment. The decision variable has a value of 1 if any treatment is selected for a pavement section at a specific point in time; otherwise, it has a value of 0. Equation 14 describes the smooth linear function at year
The pavement M&R model is a multi-objective optimization model with two linear objective functions. This multi-objective integer linear programming problem is transformed into a single-objective linear programming model using the weighted sum method.

where
Equation 15 shows the transformation of the multi-objective programming model into a single-objective function
M&R Planning Model under Budget Variability
Budget uncertainty in network-level M&R planning is taken into consideration using the concept of uncertainty set from robust optimization technique.
In this section, we consider the available budget


The study now proposes the variable-budget network-level pavement M&R planning model, where the budget available for M&R work is unknown to decision makers and the budget parameter belongs to the uncertainty set

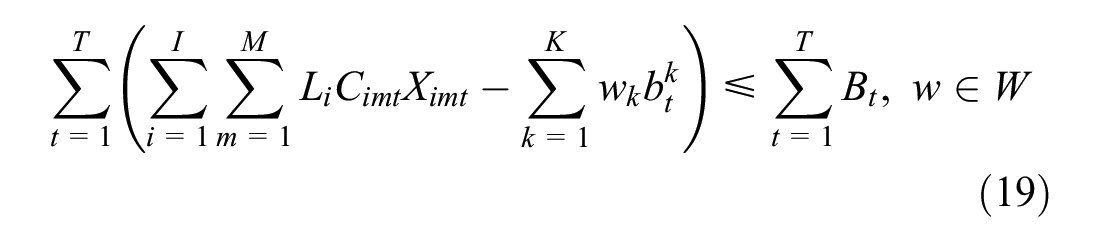
The variable-budget model now maximizes the objective function (16), satisfying constraints (5) to (14) and (18). If we plug in the definition of an uncertainty set, the uncertain budget constraint (19) can be written as the following inequality:
Case Study
This section presents a numerical study of the proposed optimization scheme for an example pavement network. The study demonstrates the applicability of the proposed models in M&R planning. The numerical analysis was conducted with the General Algebraic Modeling System (GAMS) ( 38 ).
Data
This case study was conducted using a small hypothetical network of 45 flexible pavement sections. The total length of the roadway segment in the analysis network is 175.64 mi and the average network condition score is 75. The input data and basic assumptions for the case study were taken from the study of Wang et al. ( 14 ).
M&R treatments applied to the pavement sections in the case study are grouped into five treatment level categories. These are: need nothing (NN), preventive maintenance (PM), light rehabilitation (LR), medium rehabilitation (MR), and heavy rehabilitation (HR). NN indicates that no M&R treatment is applied to the section. TxDOT uses these five generic treatment levels for the development of the 4 year pavement management plan ( 39 ). PM typically includes seal coats or overlays less than 2 in., and LR usually incorporates overlays between 2 and 3 in., repairs to potholes and pavement edges, and performing pavement level-up activities. MR includes 3 to 5 in. of structural overlay, base repair, replacing the surface layer, and milling off the worn-out surface layer. HR is the reconstruction of the pavement section.
The study assumes a 5 year planning horizon when M&R treatments are applied at the beginning of each period in the planning horizon. Additionally, each pavement section receives only one M&R treatment per year, and the maximum number of treatments allowed in each section is five ( 14 ). Each pavement section receives one treatment from LR, MR, and HR; and each pavement section receives at most three PM treatments.
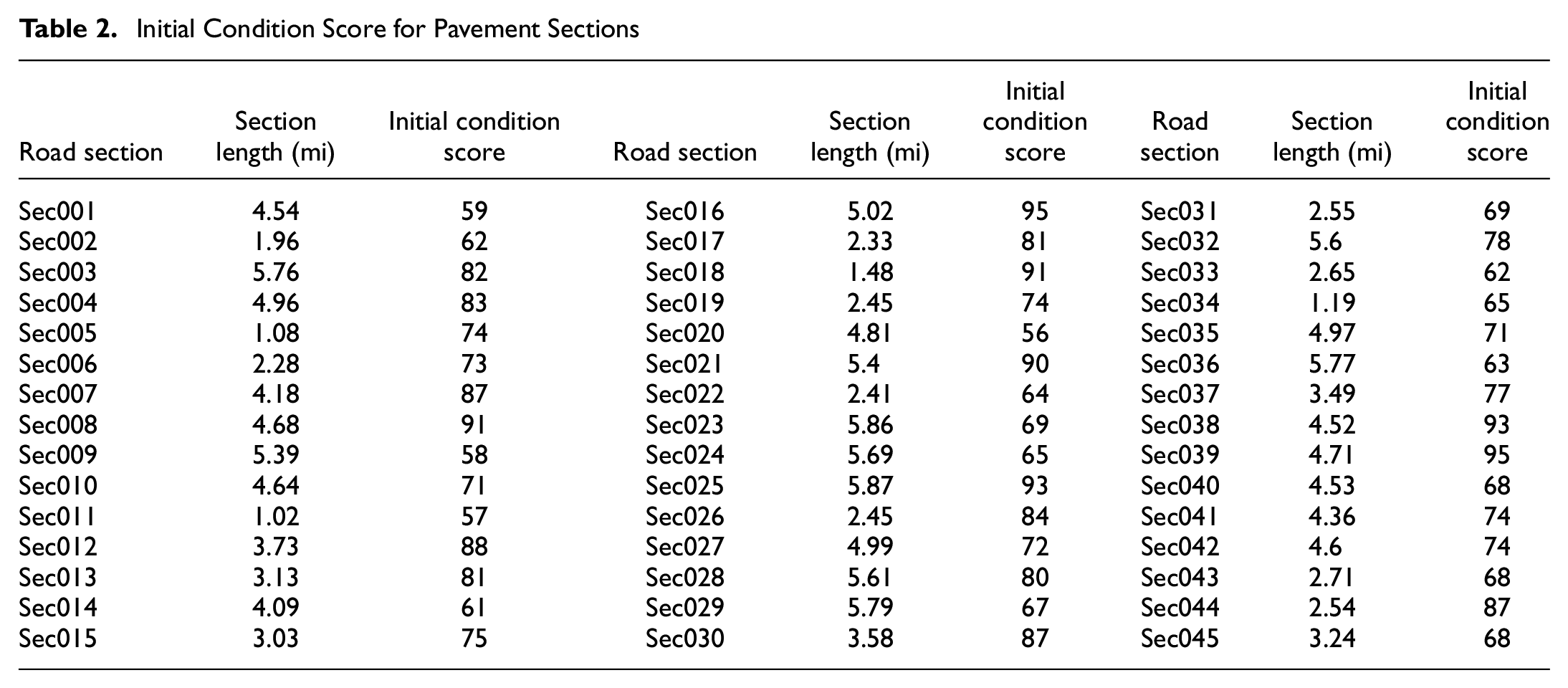
The TxDOT Pavement Management Information System (PMIS) condition score (CS) is used as a performance measure for a pavement section for the purposes of this study. Pavement section characteristics are presented in Table 2.
Initial Condition Score for Pavement Sections
Improvement in condition scores because of M&R treatments is measured by the increase in condition scores. The average increase in condition scores used in this study was taken from work conducted by Wang et al. ( 14 ), as shown in Table 3. The application of each M&R treatment incurs a specific cost to the implementing agency. In this study, the unit costs for M&R treatments were taken from the 4 year pavement management plan analysis report ( 39 ). Unit costs are adjusted for the 2014 dollar and are shown in Table 3. Pavement deterioration rate can vary across pavement sections, as well as across levels of M&R treatment. To conduct the numerical example, different pavement deterioration rates are assumed for different treatment levels. Deterioration rates are shown in Table 3. Also, deterioration rates of 3% and 5% are assumed for pavement sections with initial condition scores above 70 and below 70 respectively. The minimum and maximum condition scores for each pavement section are set at 60 and 100, respectively. The study assumes that the overall network condition score should not be less than the initial average condition.
Average Increase in Condition Score, Deterioration Rate, and Cost of M&R Treatment
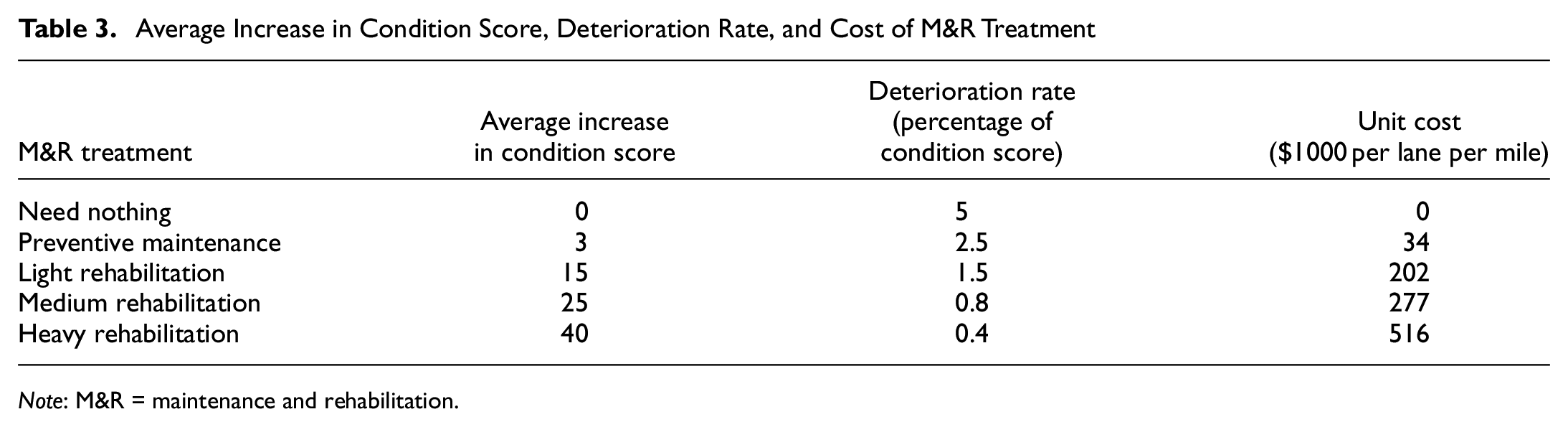
Note: M&R = maintenance and rehabilitation.
Solutions
To solve the integer programming problem, a budget of $27,800,000 is considered for the planning horizon. This budget is used directly in the fixed-budget model. The variable-budget model of the M&R planning problem derives the M&R budget from randomly generated budget deviation scenarios. The generation of scenarios depends on the range of budget fluctuations defined by the decision maker. In this numerical study range of fluctuations is assumed to be plus or minus 15% of the annual average of the total budget. Variable budgets are calculated based on Equation 19 using random generation of scenarios of budget deviations and their corresponding weights. In this study, the program is designed to select the variable budget based on the requirements of defined constraints.
The pavement M&R planning problem is programmed in GAMS with CPLEX solver (
40
,
41
) on NEOS server (
42
,
43
). The problem is programmed with the weighted objective function described in Equation 16 to solve for nondominated solutions or Pareto-optimal solutions. To a bi-objective optimization problem, a solution is nondominated if the improvement in one objective can only be achieved by worsening the other objective. The Pareto-optimal frontier is defined as the set of all nondominated solutions. This curve is formed by varying the weighting factor on an objective function between two extremes, that is, by assigning relative importance to one objective over other. Figure 2 shows the Pareto-optimal frontier for the problem of maximizing
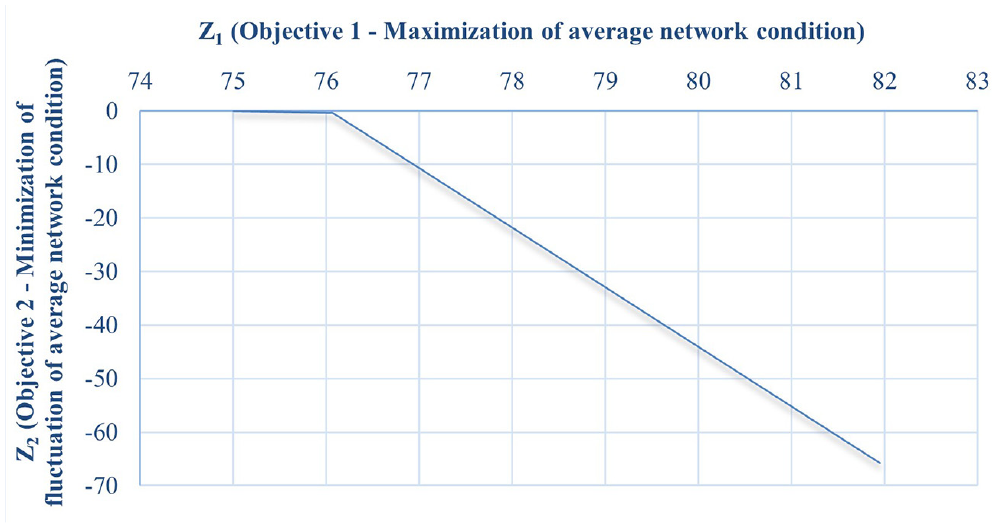
Pareto-optimal frontier (deterministic budget).
The parameter λ defines the values of the system to the decision maker. The decision maker determines the relative importance of one objective function over another. When the decision maker sets λ equal to 0.0, that implies minimizing fluctuations of network conditions is the most important, and maximizing network conditions is the least important. That means the decision maker could achieve the best Z2 and the worst Z1. The reverse is true when the decision maker chooses λ equals 1.0. So, it is at the decision maker’s discretion to choose a specific scenario from the available alternative solutions. The parameter λ can take any value between 0.0 and 1.0. When the decision maker chooses a value of λ, say 0.3, this indicates that the decision maker believes minimization of condition fluctuation is more important.
The solutions to both the fixed-budget model and the variable-budget model yield an M&R plan for each pavement section. We can have different M&R plans by varying the values of
The M&R plan assigns an M&R treatment to each pavement section over the planning horizon to achieve the objectives based on the relative importance of the system as defined by the decision maker. Table 4 shows the M&R plan for different weights on objectives. It shows an M&R plan when minimizing fluctuation of network conditions is more important to the decision maker (
M&R Plan
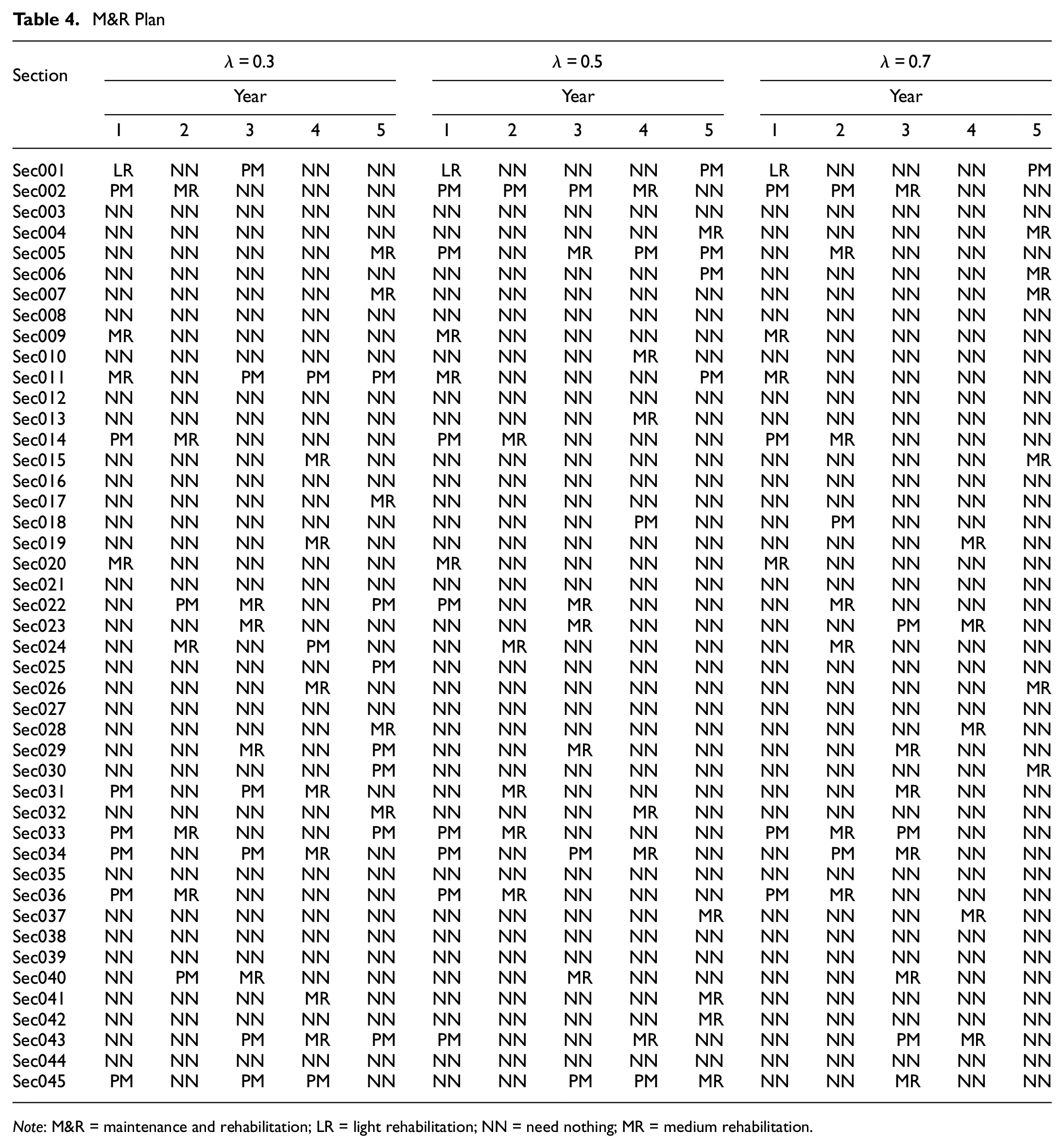
Note: M&R = maintenance and rehabilitation; LR = light rehabilitation; NN = need nothing; MR = medium rehabilitation.
Treatment costs for the entire network and available budget for both fixed budget and variable budget are shown in Tables 5 and 6. Table 5 shows the treatment costs in each year of the planning horizon for a fixed budget of $27,800,000. Table 5 also indicates the treatment costs for different values of the system including two extreme weights. It can be observed that when only the maximization of the average network condition is considered, the program spends all the money in the first year of the planning horizon. This is because allocating all the money in the very first year yields the best average network condition. This result may seem impractical in respect of implementation resources and availability of the budget during the first year of the planning period. Again, it entirely depends on the value of the system to the decision maker. Table 5 also shows the treatment costs for other relative importances of the system. It is observed that treatment costs have little difference if we compare the different values of the system. This is because the available budget is stringent, based on the condition score requirement of each pavement section.
M&R Treatment Cost (Fixed Budget)
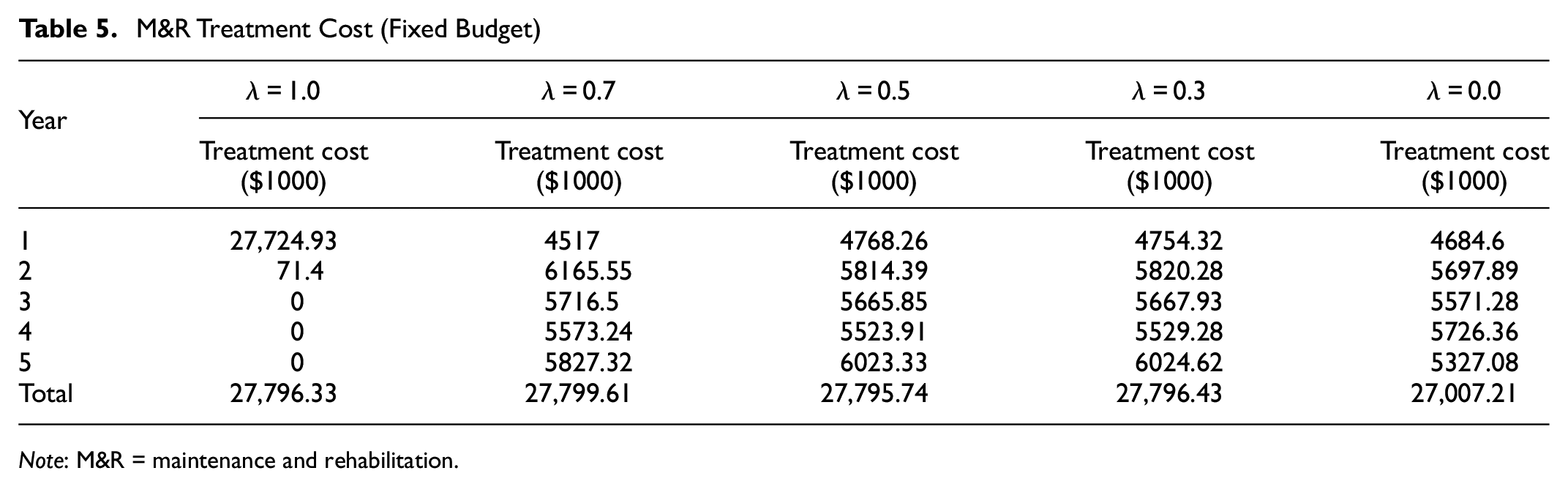
Note: M&R = maintenance and rehabilitation.
M&R Treatment Cost (Variable Budget)
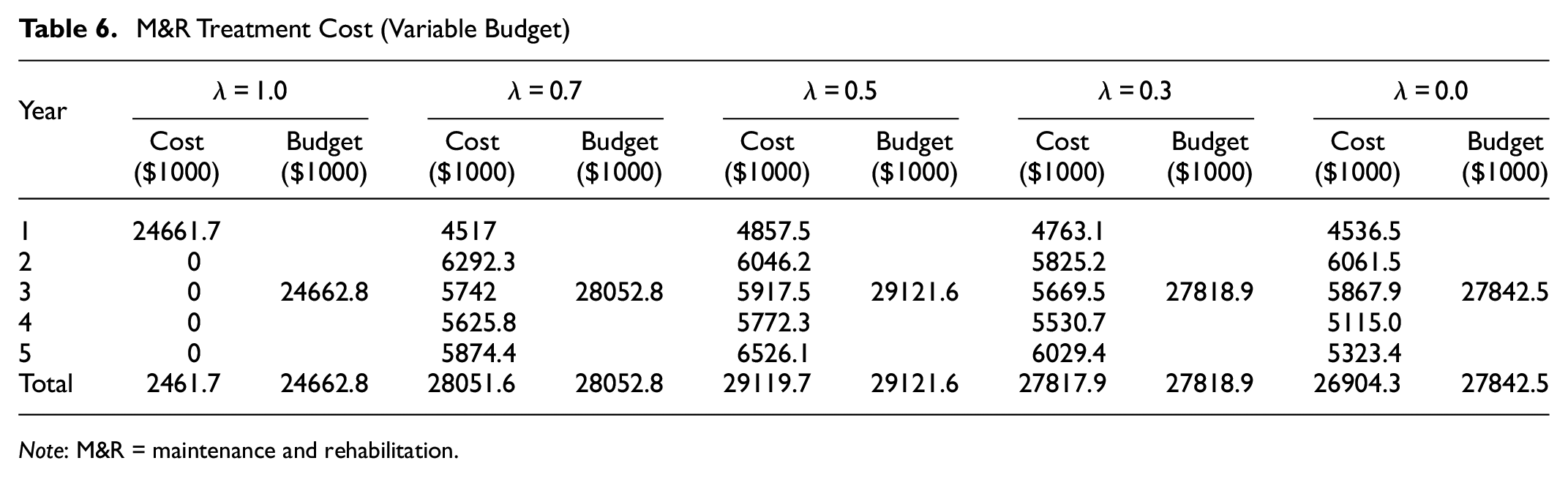
Note: M&R = maintenance and rehabilitation.
Table 6 shows treatment costs and budget using variable budget constraints for five different relative importances of objective functions including two extreme situations. The decision maker has the flexibility to select the variability of the budget considering the situation during the planning period. When the decision maker sets the range of budget deviation and number of scenarios, the variable-budget model randomly generates the total money and allocates the money. The treatment costs depend on the value of the system to the decision maker as well as other constraints such as minimum condition score requirement, the number of treatments allowed, and so on. It is revealed that the proposed model can allocate when the budget may not be fixed. Thus, variable budget constraint in the model gives flexibility to the decision maker so that the decision maker can generate a budget based on his estimates and allocate the money.
The solutions to both the deterministic budget model and the variable-budget model provide us with predicted network condition scores for each year of the planning period. This prediction of the condition depends on the M&R treatment level assigned to each section. The program uses the additive deterioration model which can take the optimal M&R schedule to calculate the condition score of each pavement section in the network. The average network condition is then predicted by a weighted average of the section’s condition scores.
Figure 3 illustrates the overall network condition score over the planning horizon for the different relative importances of the system using fixed and variable budgets (as shown in Table 6). It is observed that the overall network condition has the least fluctuation when only the minimization of network condition fluctuation is considered. As the value of the system moves toward maximizing average network condition, the overall network condition fluctuation may increase. Also, when λ = 1 the program yields the best network condition by allocating money in the first year of the planning period. Although it seems the decision maker may prefer the solution considering maximizing the average network condition, the cost of treatment in the first year would be significant. If the decision maker has the flexibility to spend the budget in the first year, decision maker may set a preference toward maximizing conditions in the network. It can be observed from Figure 3 that the proposed model provides less fluctuation in the network condition for both the fixed and the variable budget.
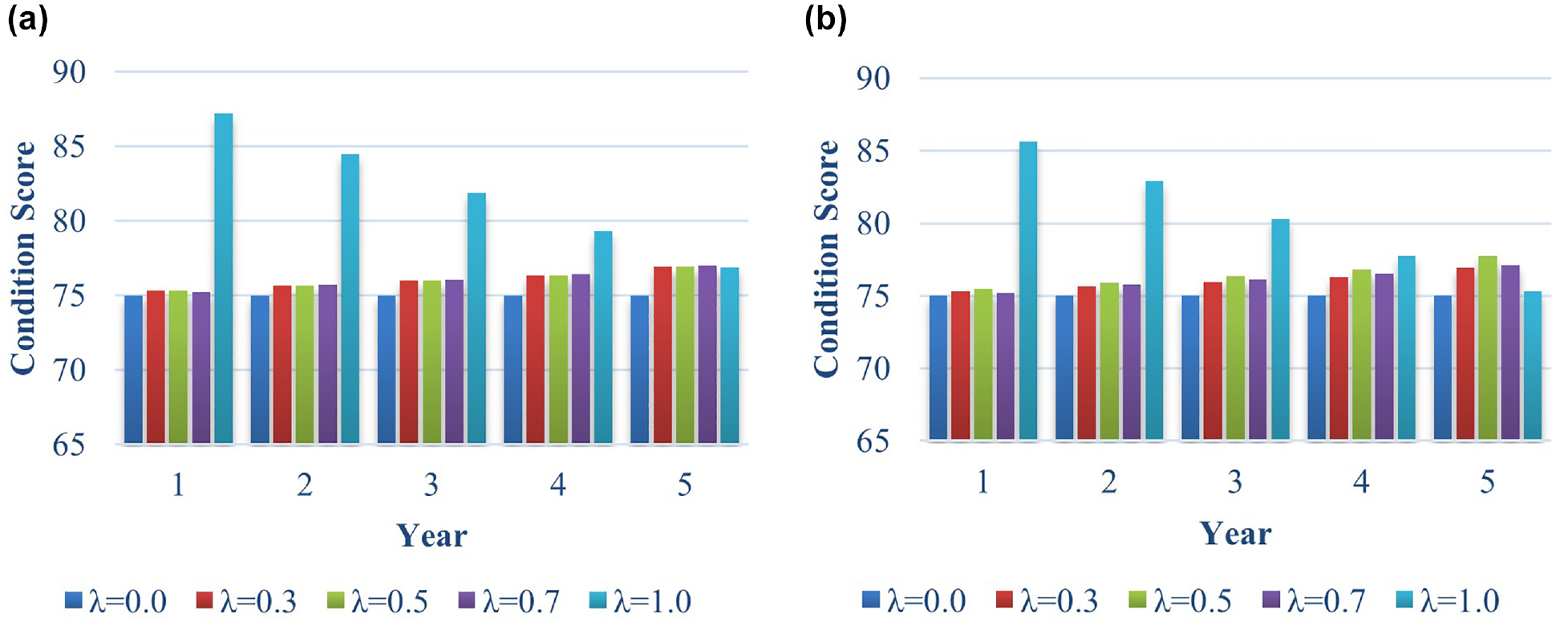
Network-wide condition score for different relative importance: (a) fixed budget and (b) variable budget.
The program allocates money in such a way that overall network condition fluctuation will be minimal. To illustrate this, Figure 4 represents two cases for different λ with the same total amount of budget—(i) predicted condition scores based on the program-allocated money and (ii) predicted condition scores based on a predetermined allocation. For the second case, treatment costs of $5,500,000, $7,500,000, $4,000,000, $4,300,000, and $6,500,000 are considered for year 1, year 2, year 3, year 4, and year 5 respectively. These costs are randomly determined from the average annual budget of $5,560,000 (average of total budget $27.8 million over 5 years). The total budget for the planning period is the same for both cases. But the condition scores have more fluctuations in the second situation. It is revealed that the proposed model can help in achieving more stable overall network conditions. Figures 3 and 4 illustrate that the proposed model can also manage the network condition through better allocation of the total budget. In the multi-objective decision-making process, it is difficult to compare the different relative importance of objective functions, because improvement in one objective can be achieved by worsening the other objective. So, it is the decision maker’s value put into the system that yields the final optimal results.
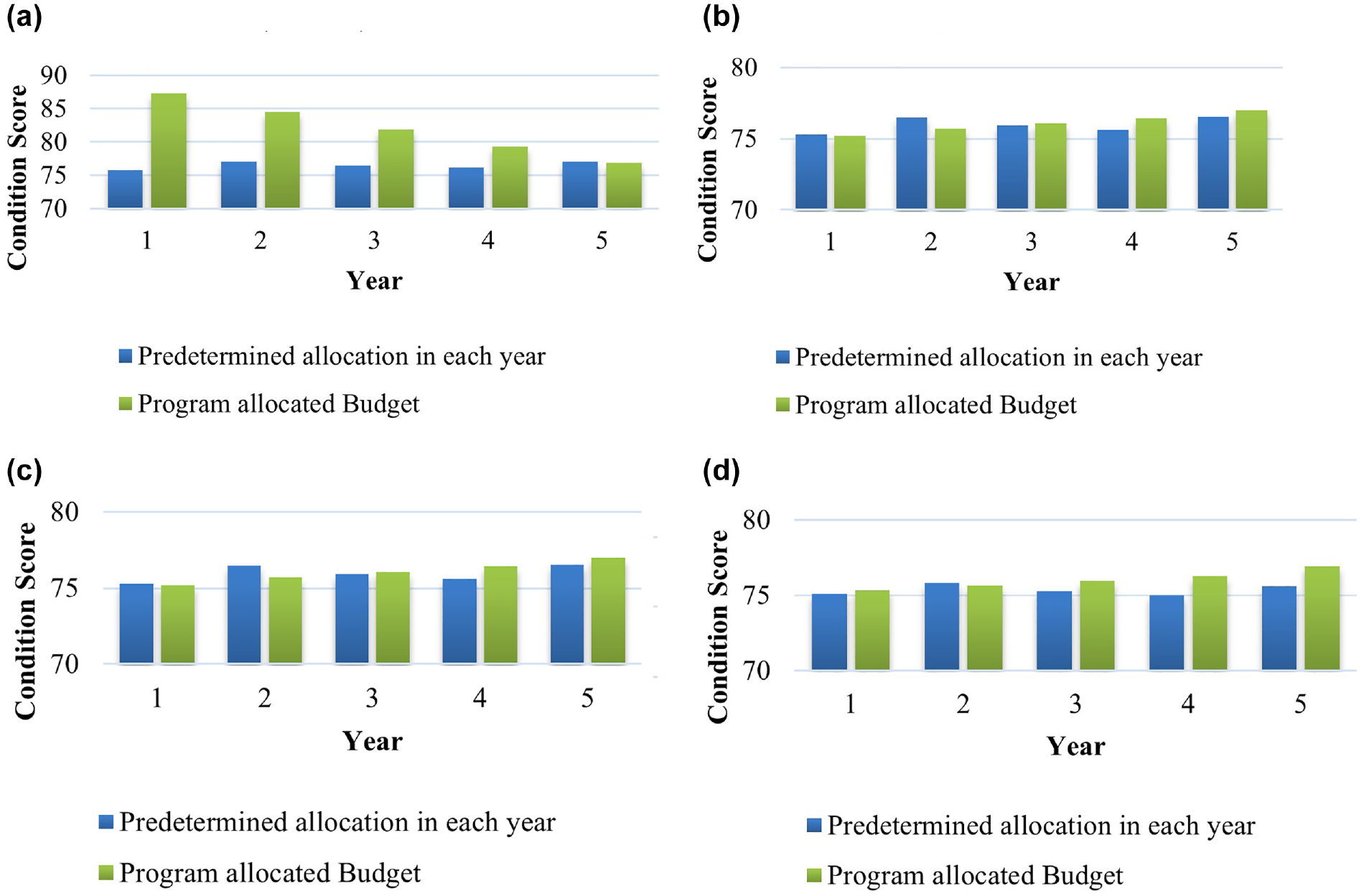
Network-wide condition score comparison (program-allocated budget versus predetermined annual budget): (a) λ = 1.0, (b) λ = 0.7, (c) λ = 0.5, and (d) λ = 0.3.
Conclusions
This paper discussed an optimization model to manage pavement conditions at the network level. The model is formulated as a multi-period linear integer programming model with two objective functions—(i) maximizing the network average condition score over the planning horizon and (ii) minimizing the deviation of network conditions from an idealized condition score trend. The proposed model also includes the feature of the variable budget constraint. The variable budget constraint is formulated using the uncertainty set concept from the robust optimization method. The variable-budget model can capture the random characteristics of the budget to some extent to generate variable budget scenarios. This feature gives the flexibility to examine the possible budget variations. A numerical experiment has been carried out on a small network consisting of 45 pavement sections to demonstrate the applicability of the proposed model in pavement M&R planning to manage the pavement condition fluctuation at the network level. The bi-objective programming model is solved using the weighting sum method. The relative importance of objectives for optimal planning is discussed. Results of the numerical example indicate that—
The proposed model is able to handle deviations in pavement conditions at the network level. The model allocates the total budget available so that an acceptable condition at the network level can be achieved. The model can handle both fixed budgets and variable budgets.
The degree of management of network conditions also depends on the relative importance given to system objectives by the decision maker. The decision maker is responsible for the final optimization results. For example, if a decision maker chooses to maximize the condition only, he can achieve the best network conditions. But he has to make sure that enough budget is available to implement the plan.
The proposed model can provide a flexible M&R schedule. Therefore, the model can also help decision makers in project selection for a pavement maintenance program.
In summary, the proposed model can be applied as a tool for decision makers to make a more rational decision in managing pavement condition fluctuations at the network level which is not considered in the majority of the literature. The model will assist the pavement management decision maker to develop pavement M&R program considering both pavement condition fluctuation and pavement performance coupled with variability in budget.
The future scope of the work for this study can include improving efficiency and integrating additional features. The proposed model has the scope of incorporating an efficient solution methodology that can better handle the integer programming framework for large-scale applications. It would be interesting to explore the effect of uncertainty with other parameters in the pavement management framework. There are also opportunities to expand the scope of the model for long-term M&R planning of multiple transportation infrastructures. In addition, the future extension of the model can incorporate more pragmatic variability in budget.
Footnotes
Author Contributions
The author confirms sole responsibility for the following: study conception and design, data collection, analysis and interpretation of results, and manuscript preparation.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.