
Abstract
Parking during night hours is emerging in many residential areas, with limited spaces and high demand. This lack of off-street parking forces residents to rely on on-street parking, especially at night. To date, researchers have explored various machine learning (ML) techniques to predict daytime on-street parking needs. In this study, the authors investigated the on-street parking challenge during the night hours by focusing on a specific neighborhood in Delhi. The authors collected data on demographics, socioeconomic factors, and parking habits through surveys and used these to develop a nighttime parking demand model (with regard to the number of cars parked at night), which includes parking fees as a factor. In this article, to overcome the dilemma of on-street parking space for vehicles and highlight the most significant parameters, the authors have used five different ML approaches (linear regression [LiR], lasso regression [LaR], ridge regression [RR], decision tree [DT], and random forest [RF]). The best performing model was RF (R2 = 0.9022) followed by the DT (R2 = 0.8971), RR (R2 = 0.8846), LaR (R2 = 0.8632), and LiR (R2 = 0.8613). Simulation results validate the prediction effectiveness of the problem model.
Keywords
Every vehicle needs parking at both the starting point and the destination of its journey. In urban areas, parking demand has surged because of a rapid rise in vehicle numbers over recent decades. While many metropolitan cities have expanded designated parking facilities, these spaces often cannot hold the number of vehicles during peak hours. As a result, many drivers are left to park on the street even when it’s not permitted, and this trend is likely to grow in the future. For example, in India it is predicted that the total two-wheeler population will increase by approximately three-fold (420 million) and four-fold (562 million) in conservative and aggressive growth scenarios, respectively, in the year 2050. Similarly, for cars, the total vehicle population is predicted to increase by approximately nine-fold (262 million) and 14-fold (432 million) in conservative and aggressive growth scenarios, respectively, in the year 2050 ( 1 ). These parking-related problems are more alarming in developing countries and are going to be worrisome if parking policies are not reviewed ( 2 ). As a result of a lack of adequate data and research findings, policymakers are struggling to consider alternative strategies for parking.
On-street parking (for both day and night) is one of the major urban transportation issues that affect cities all around the world (
3
). The increasing urbanization has led to a surge in demand for public spaces, particularly on-street parking. This problem is more pronounced in densely populated cities where parking demand exceeds supply. The shortage of on-street parking not only causes inconvenience but also negatively affects urban livability, traffic flow, and environmental quality. Cities like New York, Tokyo, and London experience severe traffic congestion as drivers circle blocks in search of parking spaces, contributing to air pollution and wasted time. Especially, commercial districts suffer when a shortage of convenient parking turns away potential consumers from businesses. As a result of reduced production and higher operating expenses for metropolitan areas, poor parking systems have a significant negative economic impact. It is observed that almost all the studies in the literature are focused on day parking models (
4
). Given the substantial differences in parking patterns between day and night because of variations in user behavior, demand, and purpose, it is important to understand both to develop effective parking strategies. D
With the rising number of vehicles and limited parking availability, as well as a shortage of parking spaces within buildings and apartment complexes, major Indian cities are facing the demand for high on-street night car parking in residential areas ( 7 ). Many people are facing severe problems like congestion, delays, and accidents, because of high vehicle accumulation in the residential areas at nighttime. The parking habits in India differ from those in other countries, with a strong preference for on-street parking. It has been commonly seen that automobile owners park their vehicles on the street at night in major cities like Delhi, Kolkata, and Chennai without paying parking fees. Delhi is among the cities experiencing comparable issues with parking (and without parking fees) in residential neighborhoods ( 8 ). Some measures taken by the Delhi state government over the years to address parking management are:
1.
This policy introduced comprehensive guidelines for parking management, emphasizing the need for structured parking, smart parking technologies, and user charges to regulate on-street parking demand. However, these measures primarily target daytime parking, with limited focus on night parking in residential areas.
2.
Dynamic pricing pilot projects were introduced in high-demand areas to manage on-street parking efficiently. Despite their success in reducing congestion during the day, these projects have not been extended to nighttime parking scenarios.
3.
While primarily aimed at reducing vehicular pollution, this scheme indirectly affected parking demand by encouraging carpooling and the use of public transport. However, it did not specifically address night parking issues in residential areas.
4.
This long-term strategy highlighted the importance of integrating parking policies with urban planning. It recommended paid parking zones and the promotion of off-street parking, but its implementation remains incomplete, especially for nighttime in residential localities.
In summary, residential areas in Delhi typically lack enforcement of parking fees or structured management for night parking, resulting in unmanaged demand. To address this, the authors of this paper conducted a case study in a neighborhood in Delhi to predict nighttime car parking demand and examine the impact of incorporating parking fees into the model. The authors observed that the area is heavily crowded and users of night parking in this area utilize the road without making any payments. The demand for on-street parking during this time may become irreversible if it is not immediately managed. Therefore, a systematic study of parking characteristics, parking demand, and controlling measures is highly crucial for a town planner. This paper aims to formulate a parking demand model and examine the impact of the chosen 17 factors (especially car parking fees) on the existing parking demand with regard to cars parked at nighttime through comparative analysis of linear and nonlinear machine learning (ML) techniques.
In this work, authors present the following original contributions:
(1) Current research introduces the first on-street night parking prediction model for Indian cities, focusing on a residential area (East Loni) in Delhi to analyze parking demand with regard to cars parked at night and its influencing factors.
(2) A comparative analysis of ML models, including linear regression (LiR), lasso regression (LaR), ridge regression (RR), decision tree (DT), and random forest (RF), is conducted to identify key predictors of on-street car parking demand.
(3) The model’s performances are validated using root mean square error (RMSE) and R2 values as evaluation metrics, demonstrating their accuracy and reliability.
The rest of the sections of this paper are organized as follows. The second section dives into previous literary works related to parking demand forecasting including car parking fee as a key factor and describes the shortcomings of existing parking demand forecasting models. The third section gives a detailed account of the residential area (i.e., East Loni, Delhi) that has been selected. The fourth section gives a brief description of the ML methodologies incorporated for the problem. The fifth section describes the data pre-processing method, in–out and license plate survey method has been used for data collection. The sixth section presents the results and analysis of the real parking data from 20 different streets of East Loni. Finally, the seventh section concludes with the effectiveness and feasibility of the model and provides suggestions for future work.
Literature Review
The development of on-street parking prediction models has been a topic of interest since the late twentieth century and has been studied from several perspectives. The primary goal of managing on-street car parking demand is to accurately estimate parking needs ( 9 ). In this regard, the night car parking demand needs more focus as it is a growing problem in the present societies of metropolitan cities around the world. Predicting on-street car parking demand at night involves assessing various factors, including traditional elements such as age, vehicle ownership levels, parking fees, and individual travel patterns, along with newer influences like public transit conditions, economic factors, and advancements in technology. This prediction process usually begins by examining individual factors and then integrating a wider range of variables. If we talk about the developing countries, one factor (i.e., parking fees) seems to be ignored always. Consequently, this domain has almost negligible number of literature available in the most crowded cities of developing countries (say, India, Brazil, Bangladesh, etc.) at night ( 5 , 6 ). Therefore, the authors felt the need to do rigorous study including parking fee as a crucial factor in on-street parking prediction.
Parking pricing is a well-established strategy for tackling parking problems and related transportation issues. Many studies have explored the impact of parking pricing policies from various angles. One key area of research involves identifying factors that influence how people behave in response to parking pricing.
Several researchers have investigated the variables affecting how drivers react to parking fees ( 10 , 11 , 12 ). These factors can be broadly categorized into three groups: parker demographics (parker’s gender, age, driving experience, and income level), parking lot attributes (type of parking facility [garage, surface lot, etc.], its safety, and overall convenience), and direct pricing factors (parking cost, the parking duration, and the walking distance from the parking space to the destination).
Previous research highlights the strong influence of parking prices on demand. Hensher and King ( 13 ) found that 97% of parking usage changes in Sydney’s central business district (CBD) was a result of price adjustments. In ( 14 ), analysis showed that the importance of pricing factors shifts with demand: during peak times, parking duration is the primary pricing factor, while in off-peak times, factors like duration, location, and operational costs play a greater role.
Differentiated parking fees where prices adjust based on location, time, or other factors effectively optimize parking space use ( 15 ). In a study on Xiamen, China’s parking lots ( 16 ) showed that variable pricing enhanced resource use and enabled dynamic management, especially for large facilities. Additionally, the effectiveness of fees as a regulatory tool may depend on users’ socioeconomic profiles ( 8 ). Numerous studies have explored parking pricing from various perspectives. For example,
Impact on travel choices: Khordagui ( 17 ) examined California data to see how parking prices affect car commuting decisions.
Demand and user satisfaction: Mo et al. ( 18 ) conducted a case study in Nanning, China, to assess how roadside parking price adjustments affect demand and user satisfaction.
Studies like ( 19 ), ( 20 , 7 ), and ( 2 ) show that increased parking fees generally reduce parking duration, though the effect on turnover rate varies. Overall, new fee structures significantly alter roadside parking behavior.
Parking demand prediction models incorporate various socioeconomic, spatial, and temporal factors. Key variables include vehicle ownership, household income, population density, and the proximity of residential or commercial areas. Temporal factors, such as peak hours and weekends, significantly influence parking demand. D’Acierno et al. ( 21 ) emphasized the importance of capturing such dynamic trends in prediction models, which this study uniquely addresses for night parking in residential areas.
Parking fees are a crucial factor in influencing parking demand. Dynamic pricing mechanisms, such as the SFpark program in San Francisco ( 22 , 10 ), have been proven to reduce search times, congestion, and cruising. For example, Millard-Ball et al. ( 10 ) highlighted how these strategies improve efficiency and user satisfaction.
Optimization techniques such as mixed integer linear programming (MILP) are widely used to balance minimizing driver costs and maximizing parking space utilization ( 23 ). Linear programming models further optimize pricing by reducing congestion through improved queue lengths ( 9 , 24, 25 ). Researchers like Teodorovic and Lučić ( 26 ) demonstrated the revenue-maximizing potential of parking pricing models. Similarly, Simhon et al. refined pricing strategies using predictive models to estimate occupancy rates.
Origin–destination parking pricing (ODPP) has shown promise in lowering travel times and system costs compared to destination parking pricing (DPP), as demonstrated by D’Acierno et al. ( 21 ). Dynamic pricing strategies, including those leveraging real-time factors such as vehicle demand and occupancy, are increasingly prominent ( 27 , 28 ). For instance, Anderson and Palma ( 29 ) explored the behavioral and economic effects of elasticity-based pricing models, while Vinueza-Naranjo et al. ( 30 ) demonstrated the potential of adjusting hourly rates to enhance the user experience. Despite these advancements, most research focuses on daytime parking scenarios, leaving nighttime parking largely unexamined, especially under Indian conditions. This study aims to fill this gap.
Traditional prediction methods like multinomial logit models (MMNL) are commonly used because of their simplicity ( 31 ). However, these methods often fail to handle the complexity of large-scale, nonlinear datasets. ML techniques have emerged as robust alternatives, offering higher accuracy and adaptability. RF and DT models, in particular, have proven effective for parking demand prediction by accounting for diverse variables ( 32 ).
LaR and RR methods address multicollinearity issues and provide improved predictive performance, as shown by Vinueza-Naranjo et al. ( 30 ). Moreover, Lin et al. ( 32 ) integrated pricing models with intelligent transportation systems (ITS), enabling real-time data processing to optimize parking management. Fog computing, as proposed by Vinueza-Naranjo et al. ( 30 ), further enhances prediction efficiency through real-time analysis.
After reviewing prior research, it has been found that most of the studies on parking fees to determine on-street parking demand have been conducted during the daytime. Few studies have been conducted on parking fees during the nighttime, and no such studies have been conducted on Indian conditions. This study focuses on night parking demand in residential neighborhoods, leveraging ML algorithms to model the impact of parking fees and other factors. By applying several ML models, the study demonstrates a data-driven approach to address urban parking challenges in the Indian context. The research findings aim to guide policymakers in developing effective pricing strategies to alleviate congestion and optimize parking space utilization. The following section has addressed the in-depth information about the study area chosen to determine the demand of on-street night parking.
Study Area
This section details the study area, focusing on the traffic and parking dynamics in Delhi, specifically in the East Loni neighborhood. Delhi has experienced significant traffic congestion in recent years, particularly during the evening peak hours, largely driven by a rise in vehicle numbers. According to the Ministry of Road Transport and Highways (MoRTH) annual report for 2023–2024 ( 33 ), the total registered vehicles in India have increased dramatically over the past two decades. In 2003, there were approximately 67 million registered vehicles, including 8.6 million cars, jeeps, and taxis. By 2022, this figure had risen to 354 million, with over 49 million being cars, jeeps, and taxis. From 2012 to 2022, the annual growth rate for cars, jeeps, and taxis was 8.56%, illustrating how economic growth, urbanization, and expanded infrastructure have contributed to higher vehicle ownership.
Delhi’s vehicle growth mirrors this national trend, and it has one of the highest vehicle densities in the country, which exacerbates traffic congestion. The Delhi Transport Department reports that by 2022 ( 34 ), registered vehicles in Delhi surpassed 12 million, with private cars constituting a significant share. This surge in vehicle numbers has extended commute times and intensified traffic issues.
Field surveys in East Loni revealed that many residents face lengthy commutes, particularly those employed by multinational corporations (MNCs) in Gurgaon, about 33.7 km away. Because of traffic, these commutes often take around 1 h 40 min. Business owners frequently return home late as well, influenced by work schedules. Additionally, after arriving home, many residents go out for shopping or social activities, delaying the time they park their vehicles. This combination of factors results in most residents in East Loni parking their cars late at night, reflecting how traffic congestion and increased vehicle ownership affect residential parking demand.
For this study, East Loni in Delhi was chosen as the study area because of its notably high vehicle density at night, compared to other areas. East Loni, a sub-locality of Delhi, is located at 28.7334°N latitude and 77.2986°E longitude, as shown in Figure 1. Falling under the jurisdiction of the East Delhi Municipal Corporation (EDMC), it covers 34.68 km2 and has a population of 29,661, with 15,964 males and 13,697 females. In East Loni, the majority of residents own cars and typically park them on streets near their homes at night, as shown in Figure 2. This nightly street parking contributes to local congestion, increases the risk of accidents, and causes delays for area residents.
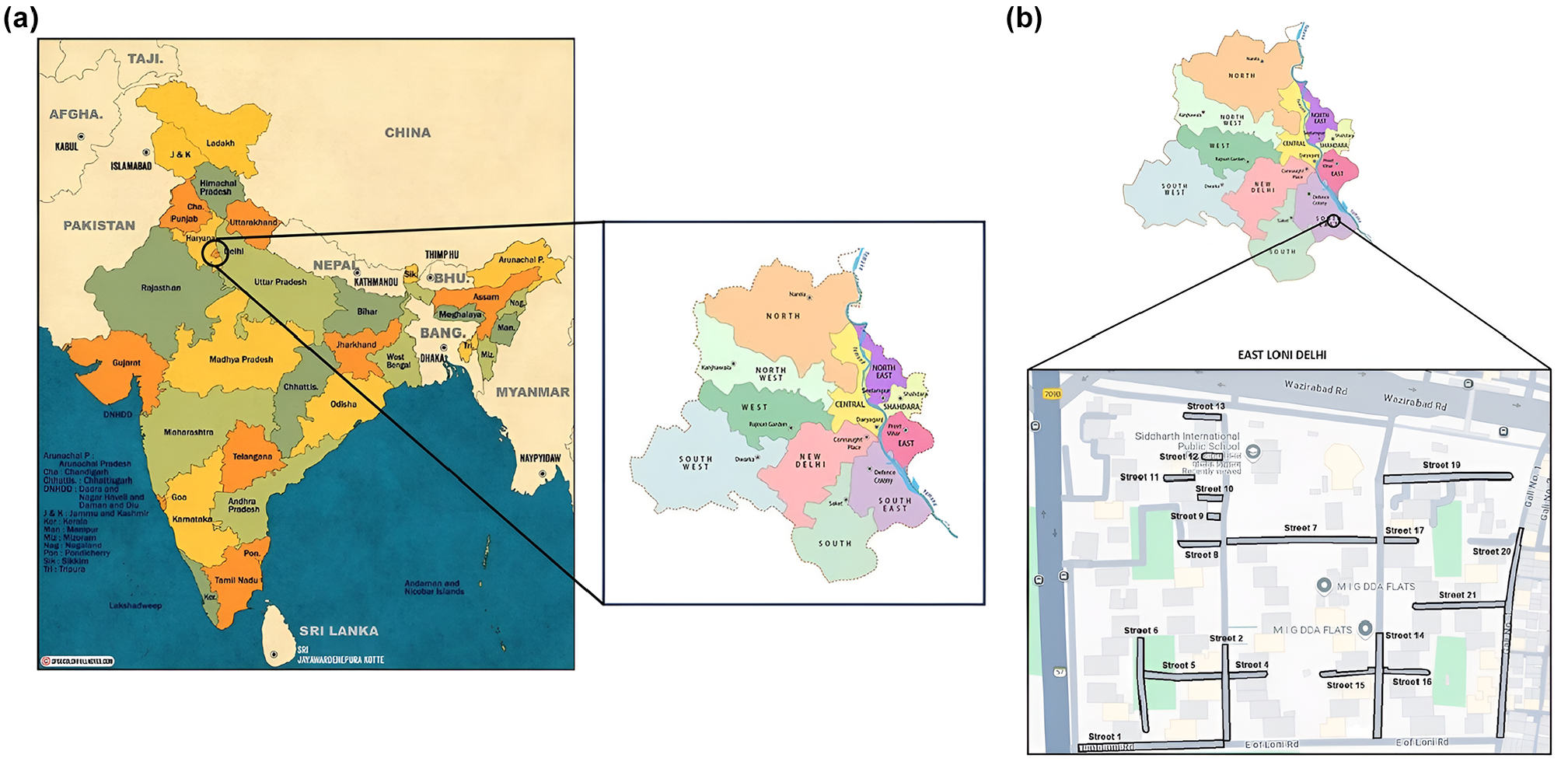
Map for East Loni, Delhi: (a) Map of Delhi in India and (b) Map of East Loni in Delhi.

On-street night parking (East Loni, Delhi).
The approach for estimating the demand for on-street parking at night and the impact of particular variables on that demand for 20 streets in East Loni was established in this research. To gain an overview of the parking location and demand, an in–out survey and a license plate survey were first conducted ( 35 ). Household surveys were conducted using a questionnaire to collect demographic, socioeconomic, and parking-related data ( 36 ). The respondents in the survey were not the same in each data collection method. The primary data collection was conducted through a questionnaire survey, which involved gathering information from different households each day. The survey spanned 30 days, from September 11 to October 10, 2023, including all days of the week. As data were collected from a new household every day, the respondents varied throughout the survey period. In addition to the questionnaire survey, two other data collection methods were employed: the in–out survey and the license plate survey. The in–out survey, focused on vehicle movement, was conducted at night from 10 p.m. to 9 a.m., over seven days, from September 18 to September 24, 2023. Similarly, the license plate survey, which tracked vehicles based on their license plates, was carried out during the same night hours, from 10 p.m. to 9 a.m., over seven days, between September 25 and October 1, 2023. These two surveys were based on field observations and were conducted separately from the questionnaire survey.
The authors conducted surveys during the busiest times at night to see how much parking was being used in the area. These data formulated a model to predict how much parking would be needed. With the variables listed below, the parking demand equation with respect to the number of cars parked at night was created. Seventeen factors are selected for the model and are based on a thorough literature review ( 37 , 24 ), ensuring that they capture the key elements influencing on-street night parking demand. These factors, including socioeconomic variables (annual income, car ownership), behavioral aspects (trip duration, parking fee, and parking duration), and infrastructure-related elements (garage availability, off-street parking lots), reflect their proven relevance in previous studies. By including demographic characteristics (age, gender, and family size) and factors like vehicle safety, search time, and walking distance, the model comprehensively addresses the complexities of residential parking behavior. These factors have been explicitly mentioned below:
Methodology
Multi Linear Regression
LiR ( 38 ) is the most common predictive model to identify the relationship among the variables. Apart from single or multivariable data types the concept is linear. There are two types of LiR depending on the number of independent variables being used.
When the number of independent variables is one, it is called a simple LiR. In this case, the formula is of the form as described in Equation 1.

In Equation 1,
When there is more than one independent variable this type of LiR is called the multiple LiR. In this case, the formula is given as described in Equation 2.

where y is the dependent variable;
Ridge Regression
Hoerl ( 39 ) proposed the RR estimation. The RR is a technique for analyzing multiple regression data that suffer from multi-collinearity. In fact, it is used to overcome the problem of overfitting. Overfitting happens when the model has a higher or better performance with the training dataset and a lower or poorer performance with the testing dataset. Ying ( 40 ) has given an overview of over fitting from the perspective of their causes and methods to solve this. The author has explained four major strategies—early-stopping, network-reduction, data-expansion, and regularization. RR makes use of L2 regularization and penalizes those features that have higher slopes. In other words, a penalty is added to the square of the magnitude of coefficients to reduce the cost function. Because of this, RR reduces the standard errors and obtains more accurate regression coefficients estimation than the ordinary least square method.

where
LASSO Regression
The least absolute shrinkage and selection operator LASSO was put forwarded by Tibshirani ( 41 ) for parameter estimation and variable (model) selection simultaneously in regression analysis. The LASSO is a particular case of the penalized least squares regression with L1-penalty function. The LaR algorithm can be simplified to the following form:

where
Decision Tree
A DT also follows a hierarchical structure similar to a regular tree with roots, branches, and leaves. It consists of a root node, branching internal nodes, and terminal leaf nodes. At each internal node, a test is applied based on a specific attribute of the data. The outcome of this test determines which branch to follow, leading to a sub-section of the data. This process continues recursively until the data reaches a leaf node, which assigns a final classification or prediction ( 41 , 40 ). Essentially, a DT acts as a predictive model. It takes an input with various attributes and predicts a value based on those attributes. Internal nodes represent attributes, and branches represent possible values or sets of values for those attributes. The tree is built by starting with the entire dataset at the root node. An attribute is chosen, and the data are divided based on the possible values of that attribute. This creates sub-nodes with data subsets that share a specific attribute value. The process repeats for each sub-node until further splitting no longer improves the model. The time it takes to build a DT depends on the size and complexity of the data (number of records and attributes). One of the advantages of DTs is that they are non-parametric, meaning they don't rely on assumptions about the underlying probability distribution of the data. Additionally, they can handle high-dimensional data (data with many attributes) while maintaining good accuracy.
Random Forest
A RF classifier builds on the concept of DTs by combining multiple trees into a powerful ensemble. It can be seen as an enhanced version of bagging, a technique that introduces randomness ( 43 ). Unlike a single DT that searches for the optimal split at each node using all available features, a RF injects randomness by considering only a random subset of features at each split point. Furthermore, the RF algorithm creates a new training dataset by sampling with replacement from the original data. This means some data points may be included multiple times, while others may be left out entirely. This additional layer of randomness helps to prevent overfitting and improve the model. Finally, each tree in the RF is grown to its full potential without pruning, meaning no branches are removed to simplify the tree. This strategy, along with the other elements of randomization, contributes to the exceptional accuracy of RFs ( 23 , 10 ). RFs are also known for their speed, robustness against overfitting, and the flexibility to create as many trees as needed for optimal performance. Moreover, RF provides valuable insights into feature importance, allowing users to identify which features contribute most to predictive accuracy. With its ability to handle high-dimensional data and its resilience to overfitting, RF has become a widely adopted algorithm in various ML applications, ranging from finance and healthcare to marketing and environmental science.
Survey Techniques and Data Collection
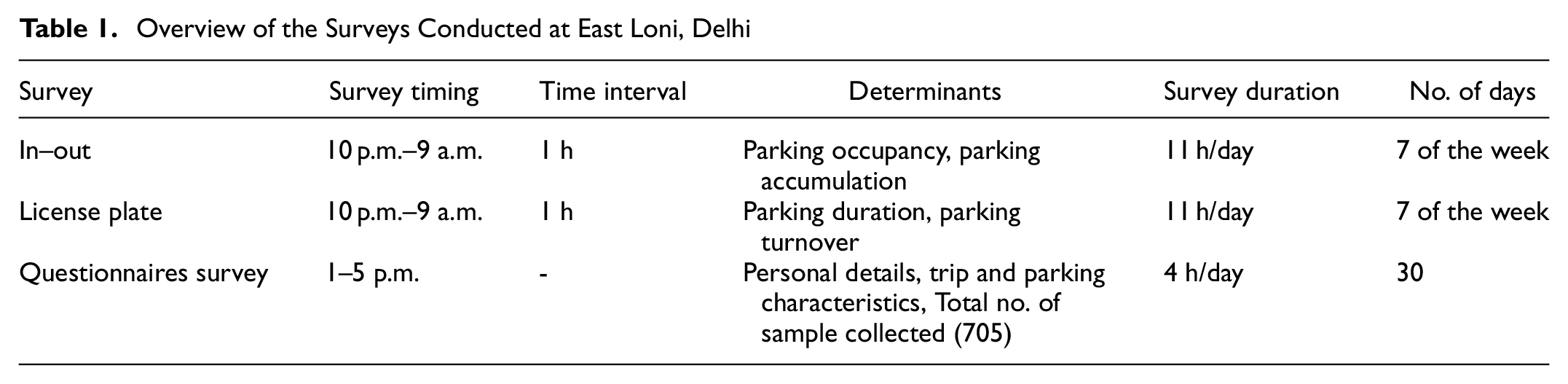
In this study, three field surveys, namely, the in–out survey, license plate survey, and questionnaire survey, were conducted to thoroughly examine night parking dynamics. Each survey targeted specific aspects of parking behavior, providing a multi-dimensional data set. The in–out survey captured key metrics such as parking accumulation, vehicle volume, and turnover, while the license plate survey offered insights into parking duration and turnover by tracking individual vehicle movements. Complementing these, the questionnaire survey provided socioeconomic and behavioral data, including vehicle ownership, family size, and parking preferences. Together, these surveys offer a comprehensive assessment of night parking patterns, summarized in Table 1, which details the methodologies and findings from the data collection phase.
Overview of the Surveys Conducted at East Loni, Delhi
In–Out Survey
A comprehensive survey was carried out in the East Loni area to analyze the parking dynamics, focusing on both the quantity of parked cars and the peak times of activity. The survey method involved meticulously tracking the influx and outflow of vehicles within the parking area across various times, spanning from Monday to Sunday, during the nocturnal hours from 10 p.m. to 9 a.m. This systematic approach enabled the precise identification of peak parking periods. The gathered data were meticulously recorded and meticulously analyzed. Figure 3 presents a graphical representation of the findings. The chart indicates a consistent trend, with the highest volume of parked cars observed between 1 and 3 a.m. daily. Furthermore, the analysis pinpointed Monday’s predawn hours, specifically from 2 to 3 a.m., as the pinnacle of parking activity throughout the week. This insight into the temporal distribution of parking demand can inform various stakeholders, from urban planners to businesses, facilitating better resource allocation and management strategies in the East Loni area.
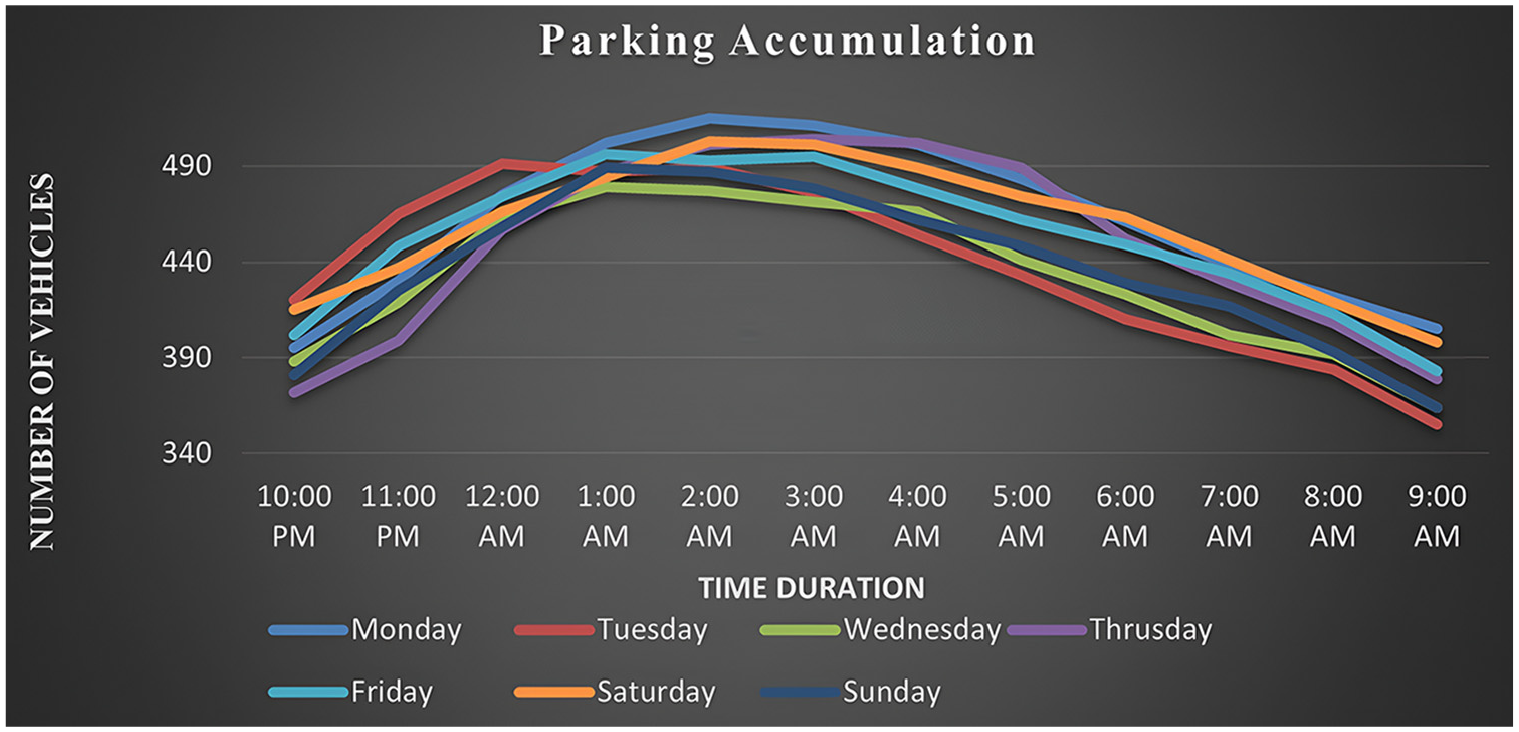
Parking accumulation profile for a week.
License Plate Survey
A comprehensive license plate survey was conducted throughout the week, from Monday to Sunday, in the East Loni area of Delhi, spanning the late evening hours from 10 p.m. to 9 a.m. the next day. The aim of this survey was to monitor the movement of vehicles in and out of parking areas. This involved closely observing the license plate numbers of vehicles entering and exiting these spaces. Additionally, the surveyors checked the parking areas every hour to gather crucial data on various aspects such as parking duration, average occupancy levels, overall parking volume, and turnover rate. These meticulous observations and data collection efforts culminated in a detailed analysis, with the key findings and insights neatly summarized in Table 2 for further examination and reference.
Parking Statistic From In–Out Ad License Plate Survey
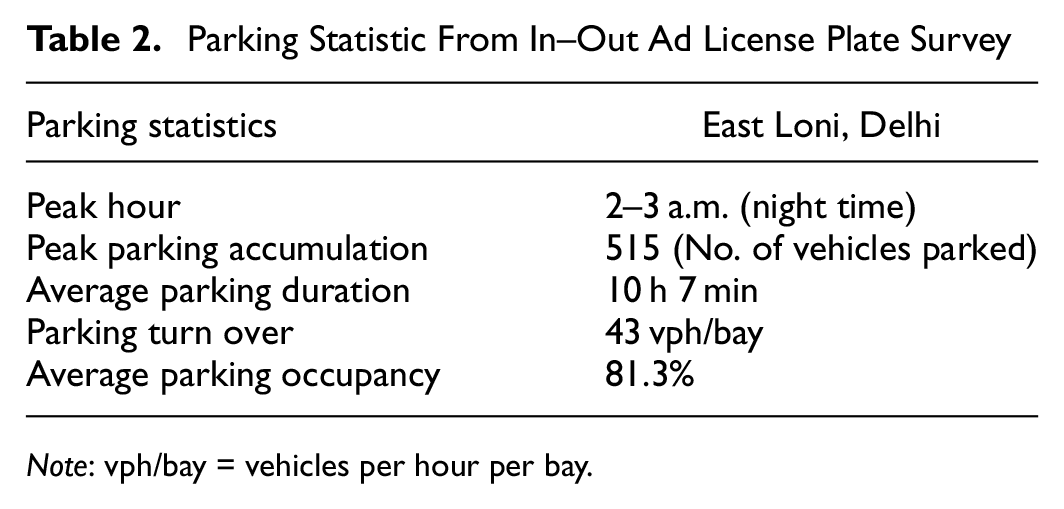
Note: vph/bay = vehicles per hour per bay.
Questionnaire Survey
In East Loni, Delhi, a comprehensive survey was undertaken over a span of 30 days, specifically from 1 p.m. to 5 p.m. each day, focusing on the afternoon period when parking demand typically peaks. The objective was to assess the parking situation in the area, and a total of 705 individuals were engaged in conversations concerning parking-related concerns.
In Table 3 it is observed that the maximum respondents were male (93.8%) and from families with over five members (70.4%). The largest age group among respondents was 31–40 years old (35%). Annual family incomes ranged between 5 to 7 lakhs (99.8%). Vehicle ownership with one vehicle was higher (97.4% owning one vehicle). Most of the users travelled daily (98.3%). 70.8% parked their cars on the street at night. The key factors for choosing a parking location are proximity (79.6%) and safety (20%).
Summary of Questionnaire Survey

Furthermore, Table 4 provides a statistical summary of various variables in the dataset, including their count (N), minimum, maximum, mean, standard deviation, and variance.
Descriptive Statistics of Demographic, Parking Behavior, and Preference Variables in the Study Data

Note: N = count; SE = standard error; SD = standard deviation.
The key findings in Table 4 include that respondents vary in age, family size, and income, with an average vehicle ownership of about 1.5 per household. The majority lack a private garage, and nighttime parking duration averages around 4.4 h, reflecting a strong need for extended parking in residential areas. The parking fees and average willingness to pay monthly fees remain moderate. Respondents indicate short average walking times and search times, with safety levels generally rated mid-range.
Results and Discussion
The ML approaches utilized in this paper were all built using the Python programming language based on the Pytorch framework. The programming of the codes are executed using Python 3.10 on an Intel (R) Core (TM) i5-7500 CPU (3.40 GHz) processor in Windows 10 (64 bit) environment. All experiments in this paper are conducted under the same operating environment.
Error Metric
Concerning model evaluation, to more accurately observe the data processing process, two commonly used error metrics are selected as the basis for evaluation: RMSE and R2. R2 is the goodness of fit of the regression forecasting model, and its value lies between 0 and 1. Of course, there is also a negative value, which means that the model is very poor. The best parking demand forecasting model is determined by comparing the values of RMSE and R2 of each model, where the highest value of R2 and the lowest values of RMSE are the best forecasting models. The evaluation indicators are calculated as shown in Equations 3 and 4:


where
Results and Analysis
This section starts with a nonlinear Kendall’s correlation analysis (KCA) among the 17 variables. The KCA can capture complex relationships between variables that may not be adequately represented by simple linear relationships. The principal idea is to highlight the most significantly related variables out of these 17 variables. The p-values are presented in Figure 4. After exploring the data in Figure 4 it can be seen that age (X1), family income (X4), vehicle ownership (X5), maximum parking fee (X14), parking duration (X11), and so forth, are some of the most variables affecting the night parking demand model. These variables secured a less p-value (<0.05) in the KCA analysis using the XLSTAT Software. Further, the correlation values between the parking demand and independent variables are showcased in the below Table 5.
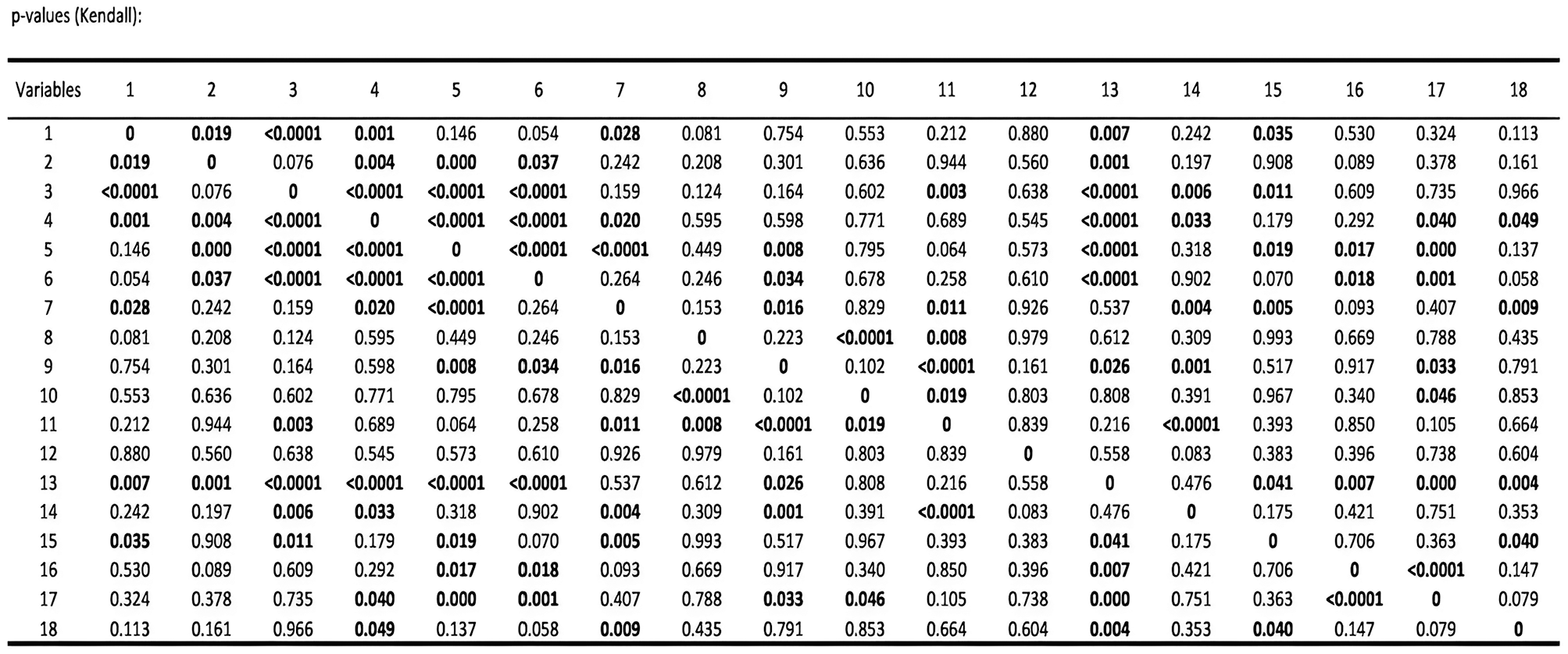
p-values using Kendall’s correlation analysis (KCA) strategy.
Correlation Values Between On-Street Night Parking Demands with Regard to the Number of Cars Parked at Night and 17 Independent Variables
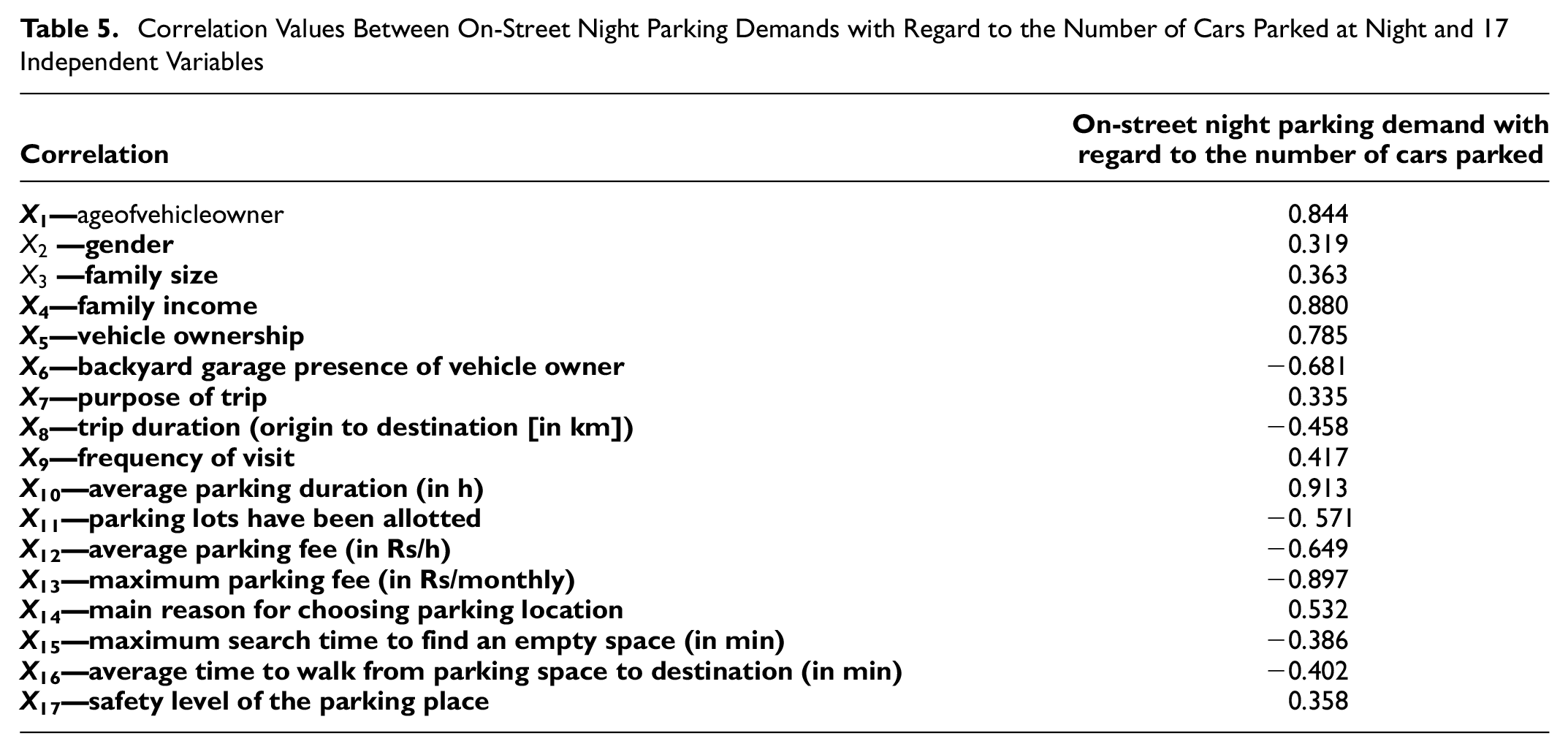
Table 5 clearly states that the on-street night parking demand is strongly influenced by factors such as vehicle ownership, family income, average parking duration, maximum parking fee, and the age of the vehicle owner, all showing high correlations (positive or negative) (≥ 0.75). Moderate correlations (positive or negative) (0.5–0.75) are observed for vehicle ownership, backyard garage presence, and average parking fee. Weaker correlations (positive or negative) (< 0.5) are found with factors like trip duration, frequency of visits, walking time, and safety level, indicating these play a less significant role in parking demand.
To verify the predictive ability of the on-street night parking model in parking demand forecasting, multiple comparison models are applied in this section for comparison under the collected parking time series data. The main reason for using multiple ML techniques is that when one uses multiple algorithms in ML it improves performance, robustness and interpretability. By comparing and evaluating different approaches, errors, and so forth. The most suitable solution for a given problem is identified. For a fair comparison among the five ML algorithms (namely, LiR, LaR, RR, DT, and RF), the specific control parameters are shown in Table 6.
Parameters of the Five Machine Learning Techniques for On-Street Parking Demand Prediction
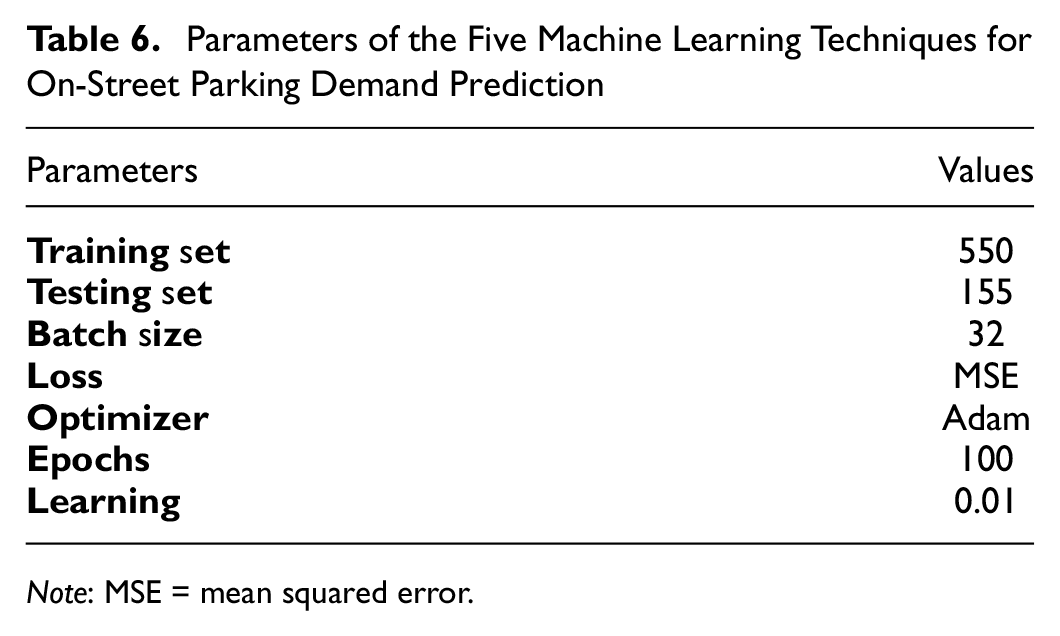
Note: MSE = mean squared error.
To investigate the prediction capabilities of the ML algorithms in a detailed manner, authors plotted their predicted values of along with the true values (refer to Figures 5–9). The performance difference can be clearly seen in the plots of true value versus predicted value graphs of all these algorithms. Readers can immediately understand that the predictions are close to the actual values by using RF (Figure 9).
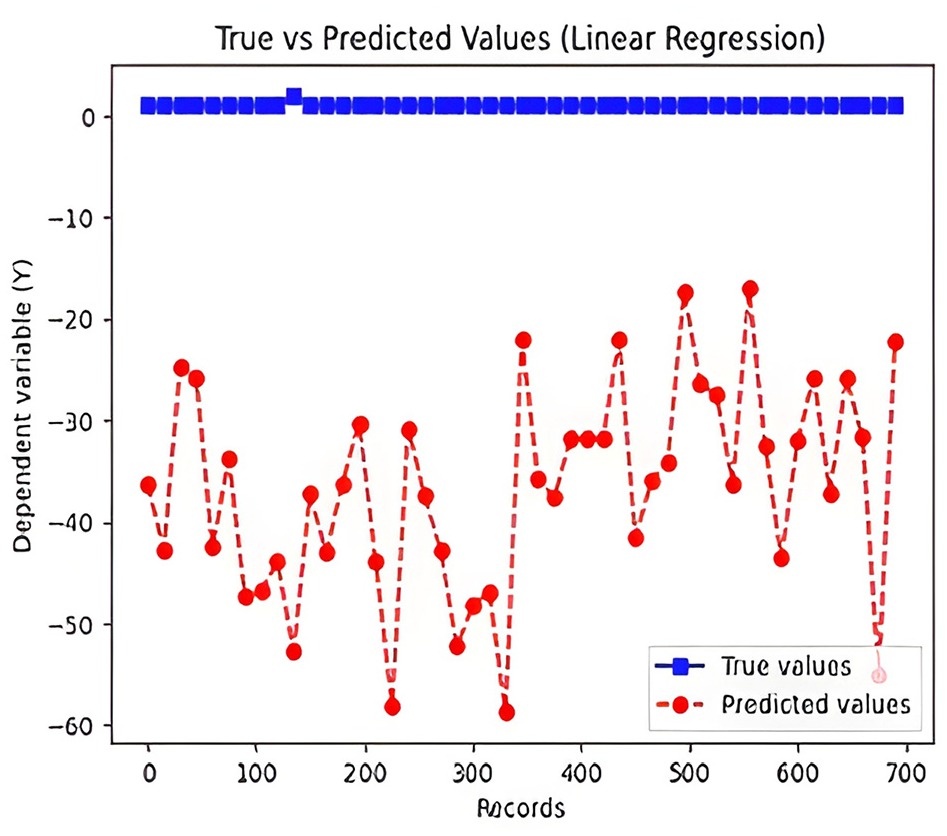
Comparison of true and predicted values using linear regression (LiR).
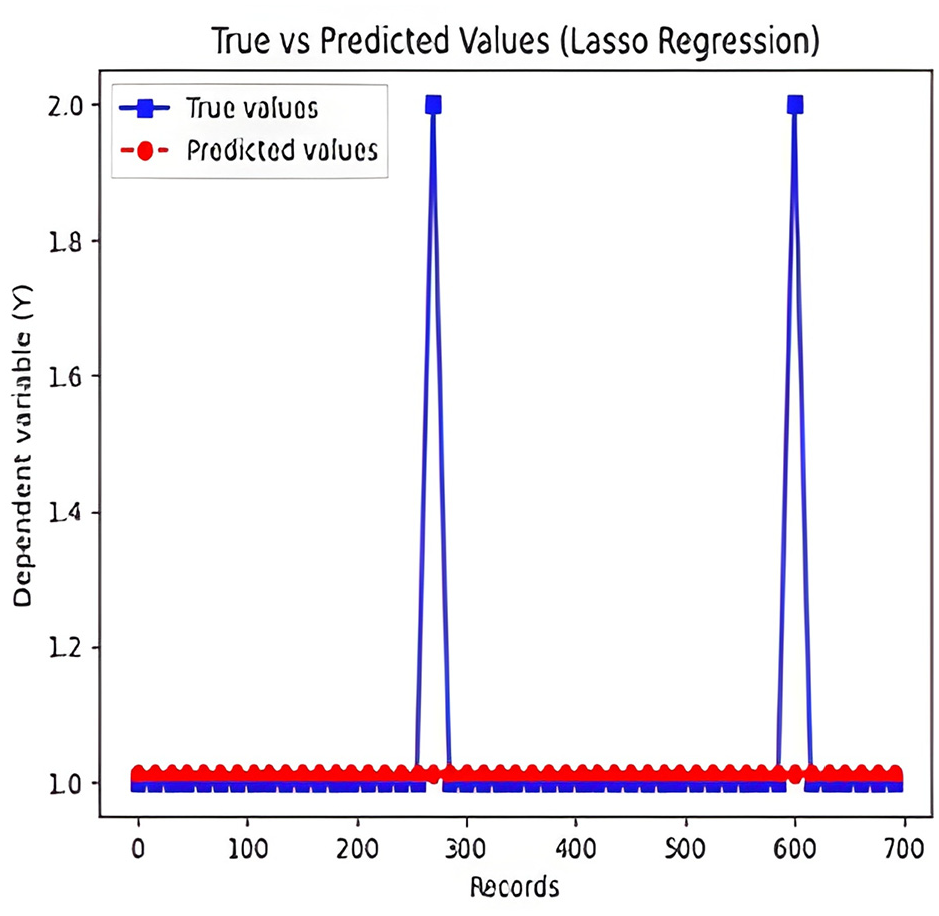
Comparison of true and predicted values using lasso regression (LaR).
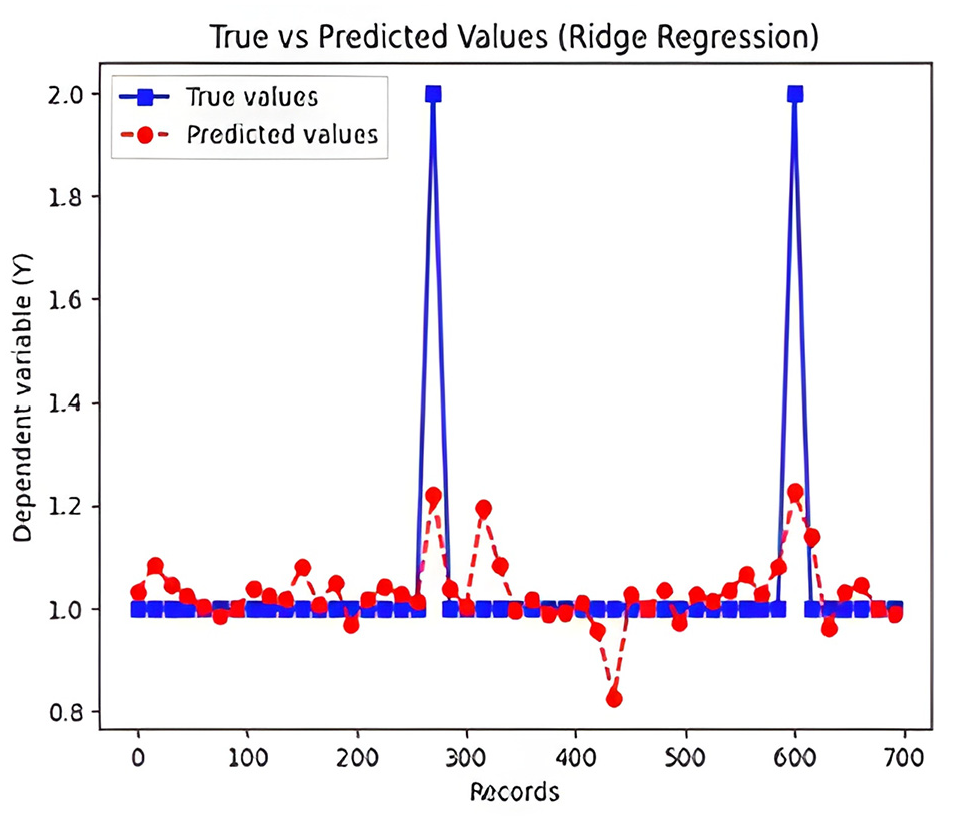
Comparison of true and predicted values using ridge regression (RR).
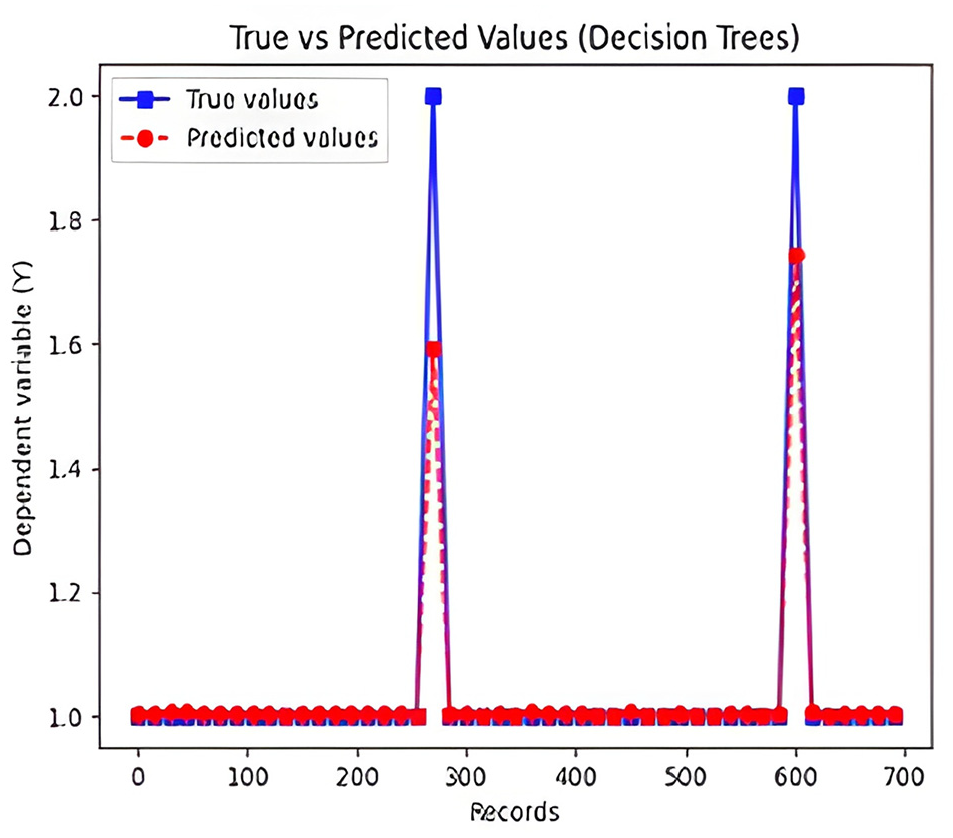
Comparison of true and predicted values using decision trees (DT).
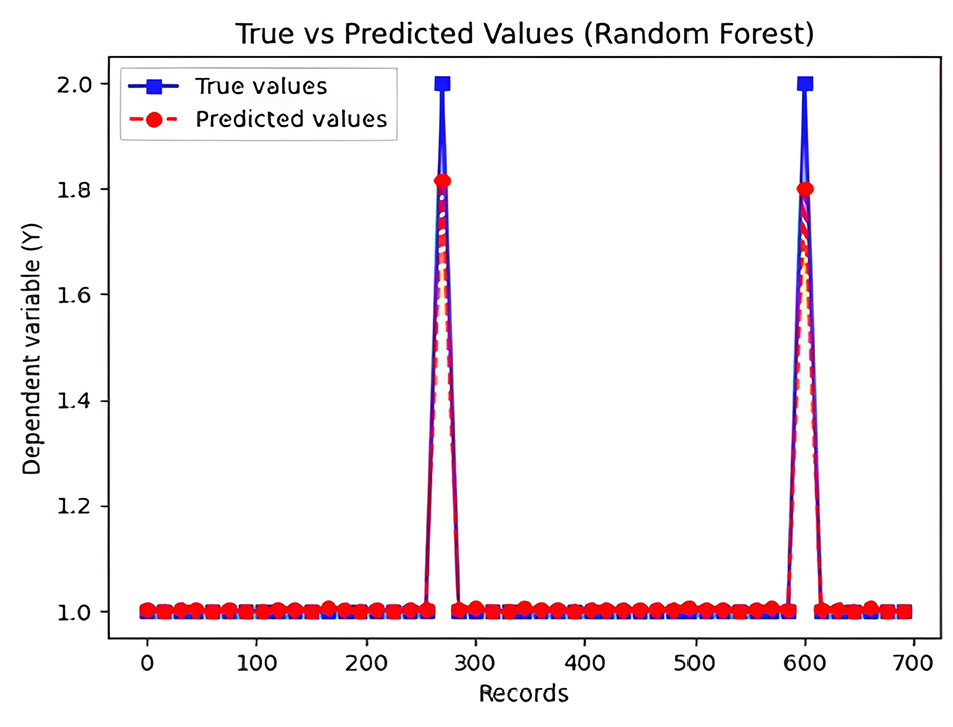
Comparison of true and predicted values using random forest (RF).
The prediction outcome using DT (Figure 8) is a near competitor of RF. However, LiR (Figure 5) fails to yield any promising predictions. The observed discrepancy in LiR predictions arise because of its inherent assumption of a linear relationship between predictors and the response variable. The dataset used in this analysis contains complex nonlinear relationships and potential feature interactions, which are better captured by algorithms such as RFs and DTs. Additionally, the inclusion of LaR and RR addresses multi-collinearity, further explaining their improved performance. The following is the order of performance of various utilized ML techniques (best to worst) used here based on true versus predicted values graphs:
Random Forest>Decision Trees>Lasso Regression >Ridge Regression >Linear Regression.
In the aforementioned comparisons, the prediction effect of RF is significantly better than LiR, LaR, RR, and DT. It can be further seen from Table 7 that the RMSE and R2 values of the proposed parking demand prediction model via RF are 0.0704 and 0.9022, respectively.
Comparison of Error Metrics for Each Machine Learning Algorithm
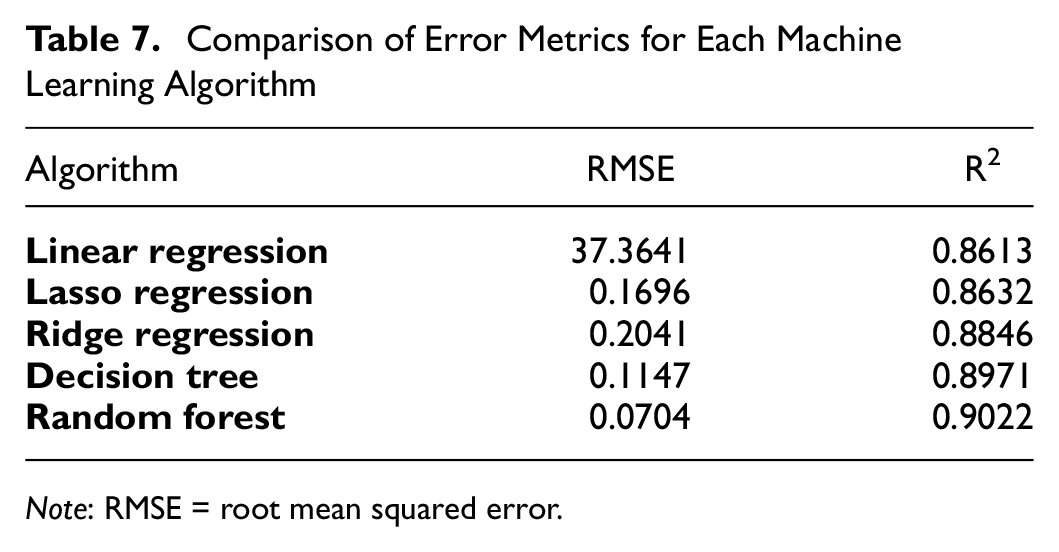
Note: RMSE = root mean squared error.
The optimal value shows that the RF algorithm has smaller prediction error and better model fitting effect than the other four ML algorithms. The order of RMSE values is mentioned from highest to lowest RMSE error.
Linear Regression >Ridge Regression >Lasso Regression >Decision Trees >Random Forest.
Now, in Figures 10–14, authors display the plot of the regression lines of the target/dependent variable (i.e., on-street parking demand with regard to the number of cars parked at night) against the independent variables (family income, age of vehicle owner, vehicle ownership, maximum parking fee, and parking duration) based on their strong correlation values in Table 5. This provides valuable insights into the relationships between these five important independent variables (out of 17 variables) and the target variable in the context of the on-street parking demand problem. The significances of these graphs are mentioned below:
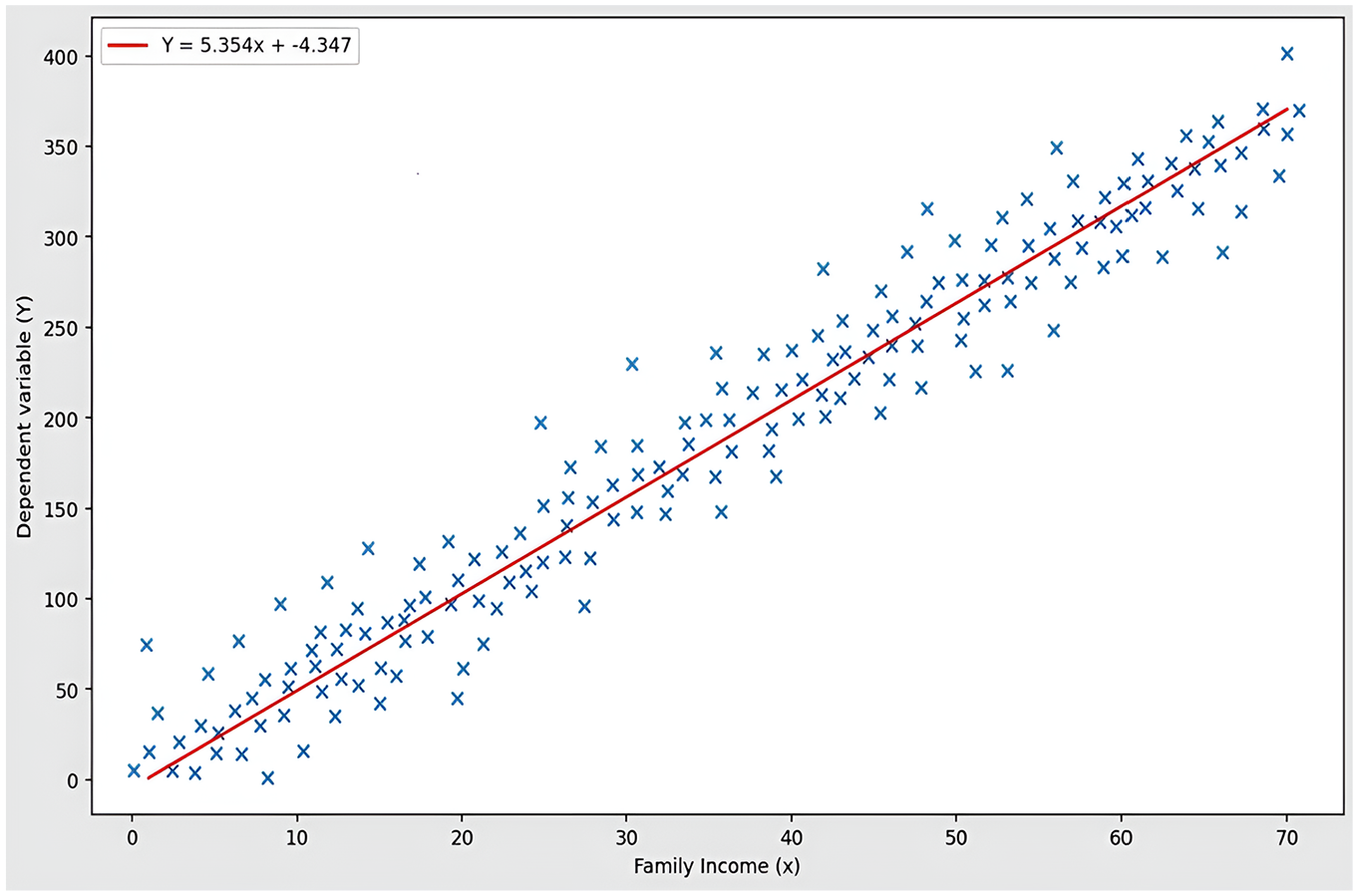
Regression line between family income and parking demand (with regard to the number of cars parked at night) from random forest (RF) analysis.
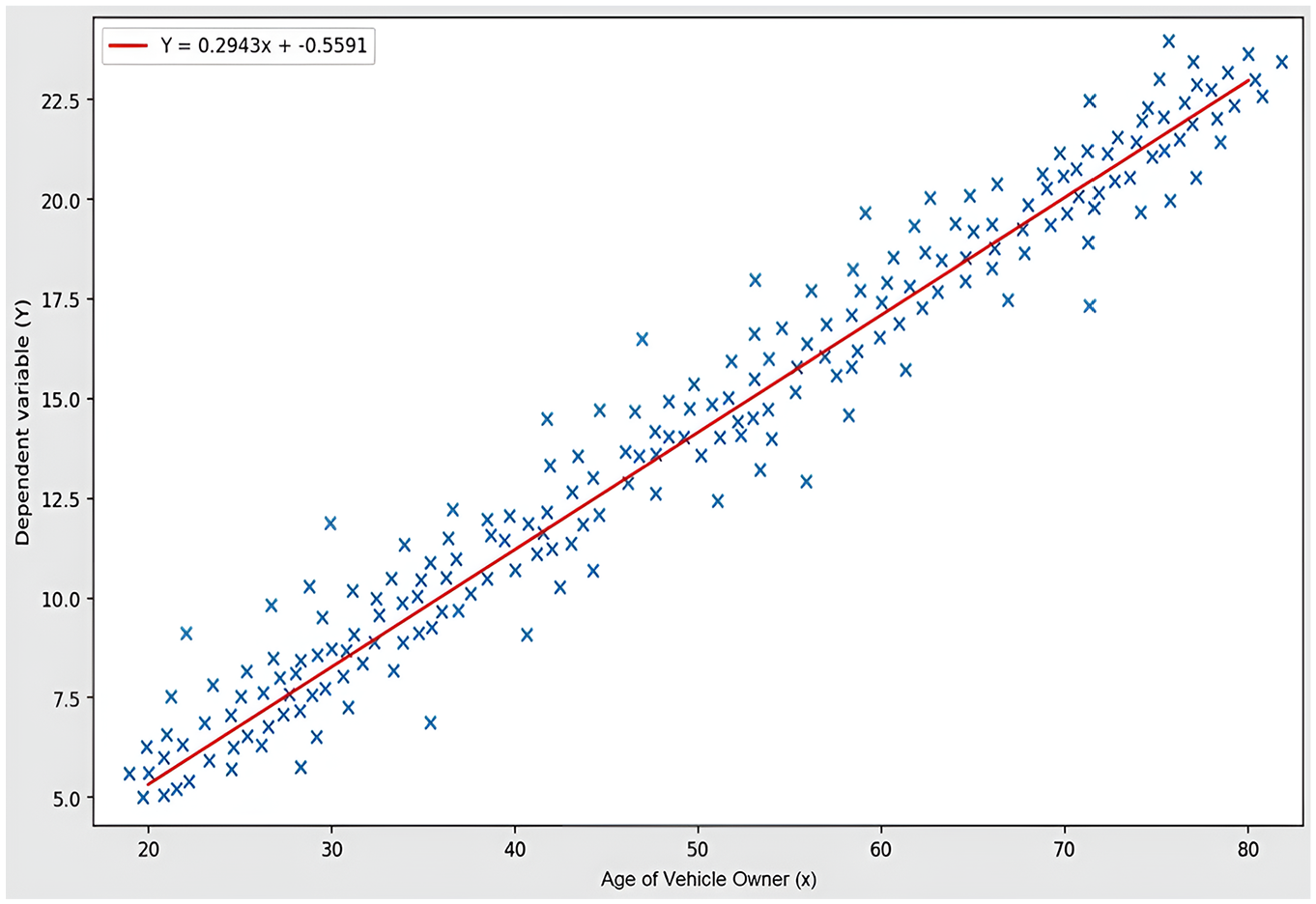
Regression line between age of vehicle owner and parking demand (with regard to the number of cars parked at night) from random forest (RF) analysis.
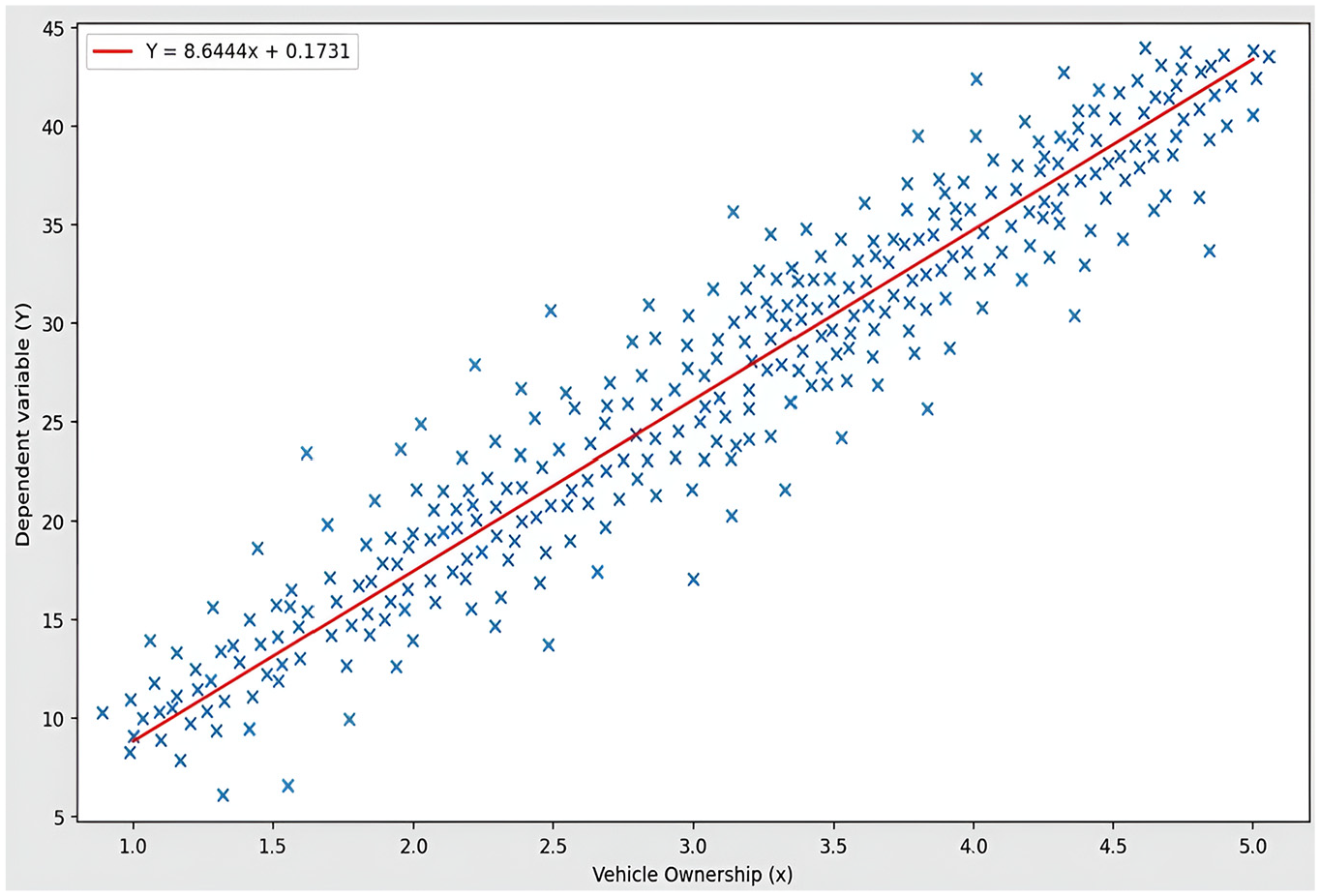
Regression line between vehicle ownership and parking demand (with regard to the number of cars parked at night) from random forest (RF) analysis.
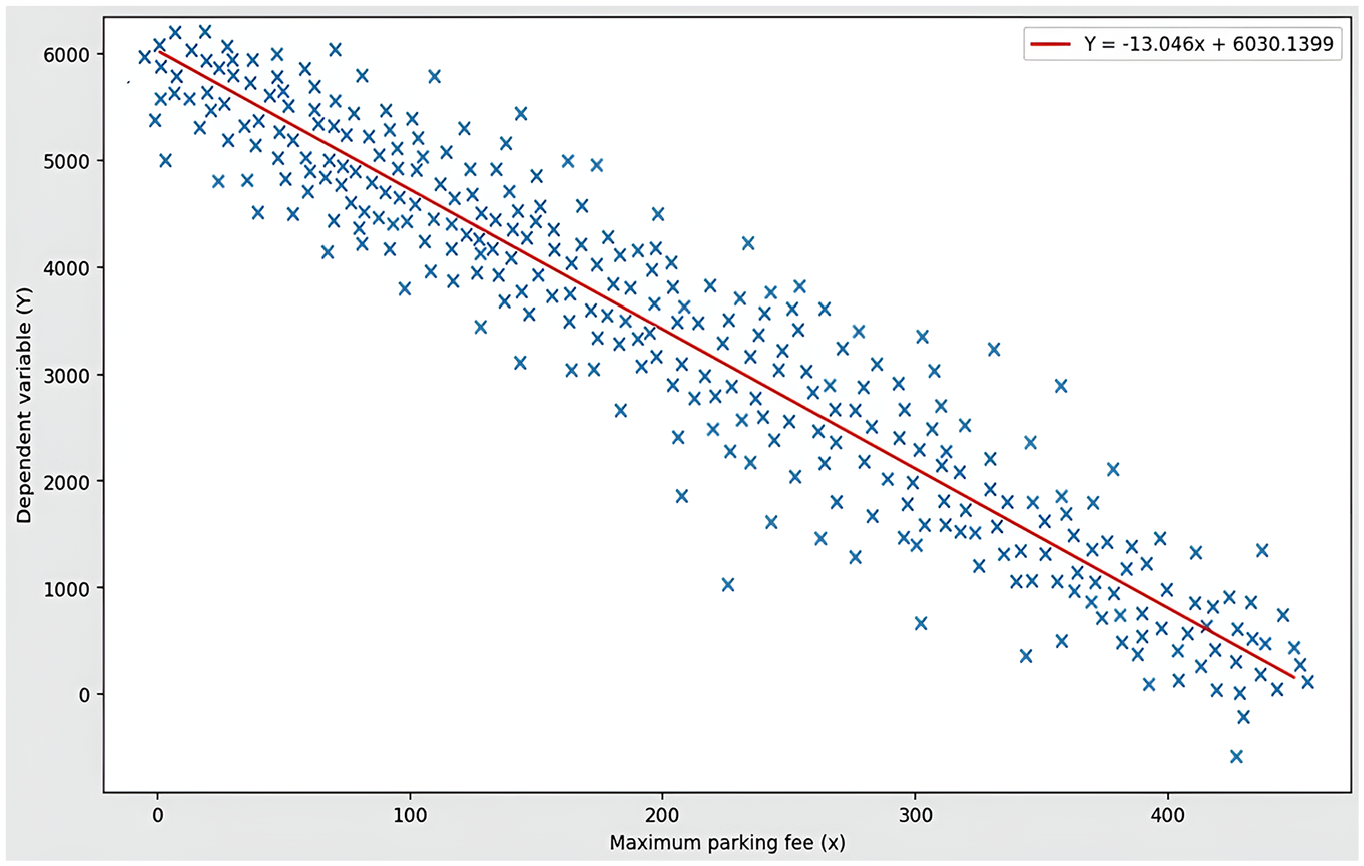
Regression line between maximum parking fee and parking demand (with regard to the number of cars parked at night) from random forest (RF) analysis.
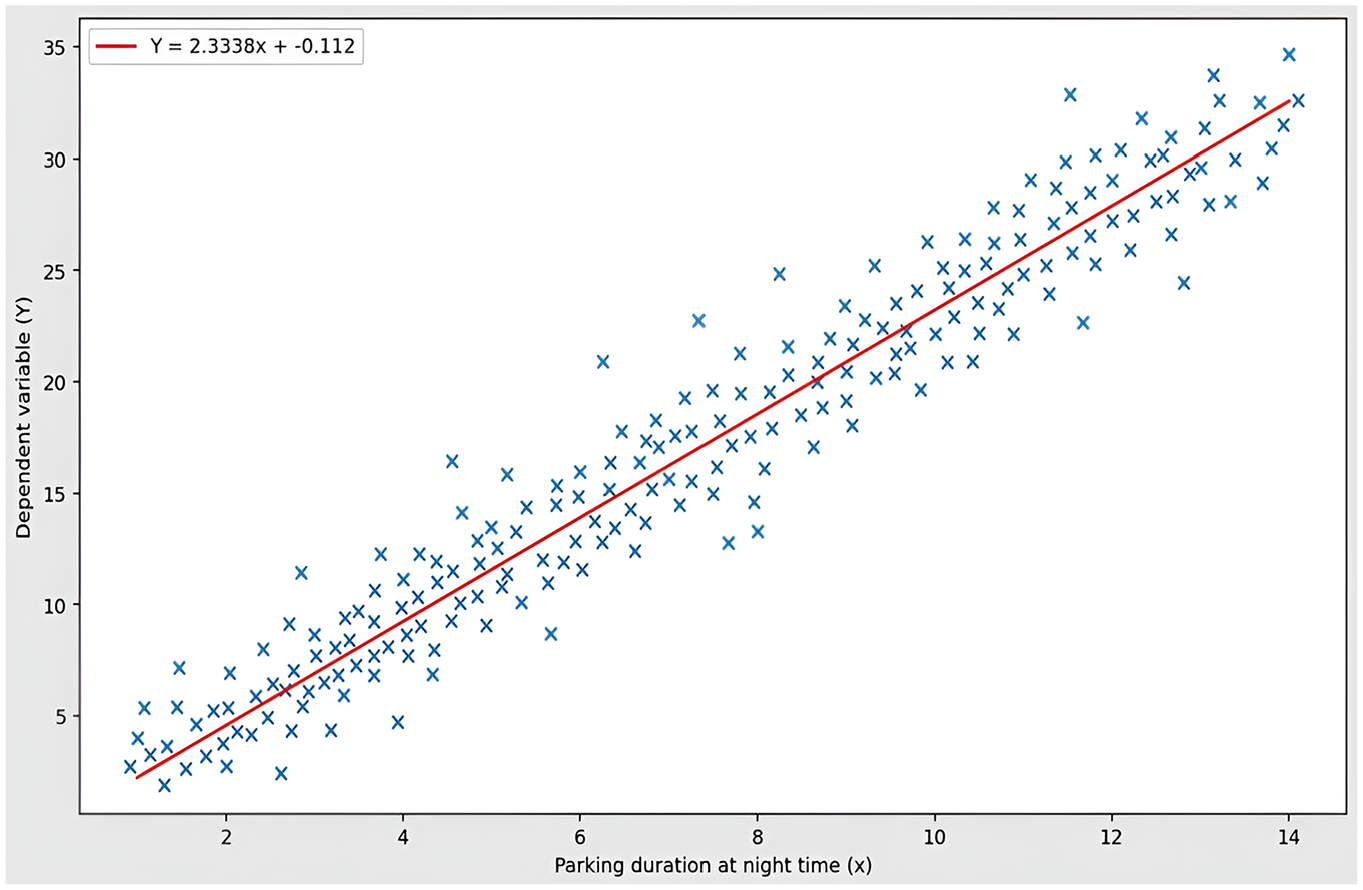
Regression line between parking duration at night and parking demand (with regard to the number of cars parked at night) from random forest (RF) analysis.
Based on the above experiments and analysis, the RF algorithm utilized in this paper has good predictive ability in parking demand forecasting. This ML method greatly improves the prediction performance and robustness of the problem model when dealing with nonlinear time series, making the prediction accuracy change with data fluctuation, and thereby improving the stability of parking demand predictions.
Conclusion
On-street parking, particularly in residential areas at night, poses a significant challenge for urban traffic management. This study not only developed a ML-based model to predict night parking demand but also provided critical insights into the implications of parking congestion in residential neighborhoods. The findings revealed a peak of 515 parked cars between 2 and 3 a.m. on Mondays, with an overall occupancy rate of 74%, reflecting substantial parking pressure and a lack of regulation. The comparative analysis of five ML algorithms demonstrated that the RF model offers superior predictive accuracy, followed closely by the DT model. These results suggest that advanced ML techniques can be effectively utilized to analyze parking demand patterns and inform urban planning strategies. Beyond the technical advancements, the study highlights the broader implications of integrating parking fees into demand management policies. Implementing daily or monthly parking fees could significantly alleviate parking congestion in residential areas during night hours, encouraging more efficient use of parking resources. Such policies not only have the potential to ease urban parking pressures but also to generate sustainable revenue streams that can be reinvested into infrastructure and public transport improvements.
Furthermore, the research underscores the necessity of contextualizing parking demand models within local socioeconomic and urban planning frameworks, particularly in cities like Delhi, where parking remains largely unregulated. By addressing technical and policy dimensions, this study provides a roadmap for urban planners and policymakers to tackle the dual challenges of parking congestion and sustainable urban mobility.
The authors plan to extend this work for more Tier-1 cities and offer recommendations for parking spot management based on traffic data. Moreover, they aim to enhance the model’s performance in the future by integrating explanatory variables such as carpooling, congestion, delay, and willingness to pay. Also, one can utilize deep learning approaches for a larger dataset with the expectation of more accurate results.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: Study conception and design: Ashwani Bokadia, Rajeev Das Mokaddes Ali Ahmed; Data collection: Ashwani Bokadia; Analysis and interpretation of results: Rajeev Das, Saurabh Mallik, Ashwani Bokadia; Draft manuscript preparation: Ashwani Bokadia, Rajeev Das. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data Accessibility Statement
Data will be made available on request.