
Abstract
For a vehicle queue system with multiple disturbances, and considering the stability of the queue and that the vehicle can adjust its position autonomously to meet the actual demand of the desired vehicle spacing, a collaborative adaptive cruise control strategy based on backstepping is designed by introducing an input saturation constraint and the artificial potential field method. Based on the driving state of adjacent vehicles, an expected vehicle spacing model was designed based on the artificial potential field method, and the vehicle queue system was modeled as a system with multiple disturbances. The stability condition of the vehicle queue is transformed into a bounded constraint on the vehicle control signal, and then the stability control problem of the vehicle queue is transformed into a control problem of the vehicle queue considering input saturation. The hyperbolic tangent function is used to constrain the saturate control input of the vehicle, and the appropriate virtual control law and adaptive law are designed by backstepping method to eliminate multiple disturbances and ensure the stability of the queue. Simulation results verify the effectiveness of the proposed method.
Keywords
The rapid growth of the economy and the acceleration of urban modernization have led to the increasing and challenging issue of traffic congestion in numerous large and medium-sized cities worldwide. Consequently, intelligent transportation systems have been introduced to solve this problem. In response to the increasing societal demand, advanced driver assistance systems (ADAS) are being developed to enhance road traffic efficiency, driving comfort, and traffic safety, and to reduce fuel consumption and exhaust emissions ( 1 , 2 ). The adaptive cruise control (ACC) system represents the first commercial application of ADAS in vehicles and serves as the first step toward automated highway systems ( 3 ). With the rapid development of autonomous driving technology and vehicle-to-vehicle (V2V) communication technology, traditional ACC systems have gradually developed into collaborative ACC (CACC) systems. This system utilizes V2V communication technology to exchange vehicle status information, such as position, speed, and acceleration, thereby enhancing the stability of vehicle queues and reducing response delays ( 4 – 6 ).
Various control methods have been proposed for the CACC system. In Zhang and Ioannou, a proportional-integral-derivative (PID) controller is designed using zero-pole configuration for the longitudinal system of trucks ( 7 ). The effectiveness of the designed controller is verified under different vehicle spacing models. Although the design of a PID controller is simple and easy to implement, it is primarily suitable for linear systems. Zhu et al. applies the optimal control method to the control of a heterogeneous vehicle queue, ensuring the stability of the queue ( 8 ). However, the optimal control method exhibits poor robustness to parameter changes and unknown disturbances in the system. Lei and Zhang propose a solution to the multi-vehicle path tracking problem, which combines distributed model predictive control with fuzzy control ( 9 ). Model predictive control offers good control effectiveness and strong robustness, but the amount of calculation is large and the controller structure is complex. Peng designs an intelligent backstepping longitudinal control system for the tracking problem of autonomous vehicles which enhances the control effectiveness of the system ( 10 ). However, it does not consider the stability issue of vehicle queues.
The primary aim of vehicle queue control is to synchronize all vehicles to travel at a consistent speed, maintain the desired following distance, and prevent collisions between adjacent vehicles. Therefore, the principal focus of the CACC system is to design a rational strategy for determining the desired following distance ( 11 , 12 ). In Li et al., the artificial potential field method is employed for controlling vehicle queues, enabling vehicles to autonomously adjust their following distance based on the relative positions and speeds of the preceding and following vehicles in congested conditions ( 13 ). This method enhances the responsiveness of vehicles during driving, but it may destroy the stability of the queue when a vehicle has large acceleration in the system. In Zhou et al., for a vehicle queue system under control input saturation, a compensation signal is introduced to prevent the error accumulation caused by control input saturation, and to enhance the stability of the system ( 14 ). However, the designed controller is only suited to second-order linear systems. In He et al., for the issue of vehicle state fluctuation within the queue, saturation control is introduced to enhance the closed-loop stability and queue stability of the system ( 15 ). However, this method is only designed for constant vehicle spacing systems. Zhou et al. propose event-triggered cruise control in platoons of connected automated vehicles with heterogeneous input limitations, explicitly addressing varying levels of input saturation among vehicles ( 16 ). However, under emergency braking conditions, this control methodology fails to respond promptly, thereby compromising the stability of the vehicle queue. In Gao et al., an adaptive fixed-time sliding mode control algorithm is proposed, which ensures fixed-time stability of the queue under input saturation constraints ( 17 ). However, this may lead to excessive overshoot in the control signal.
For the above issues, a backstepping adaptive control method is proposed for vehicle queues, based on saturation constraints and the artificial potential field method. Firstly, the communication protocol among vehicles in the queue is established, and the artificial potential field method is employed to construct a model for the desired vehicle spacing. Then, the stability conditions of the queue are transformed as input saturation constraints, and a hyperbolic tangent function is used to confine the control input. Furthermore, an adaptive controller is designed by the backstepping method for a vehicle queue system with multiple unknown disturbances, so the unknown disturbance is overcome and the stability of vehicle queue is guaranteed. The effect of the proposed control method is verified through simulation of the vehicle queue.
System Description
From a control perspective, each vehicle in the queue can be viewed as a particle, and information is exchanged among the vehicles. Assuming a queue of n vehicles, as shown in Figure 1. with the virtual lead vehicle numbered 0 and the following vehicles numbered 1, 2,…,n.
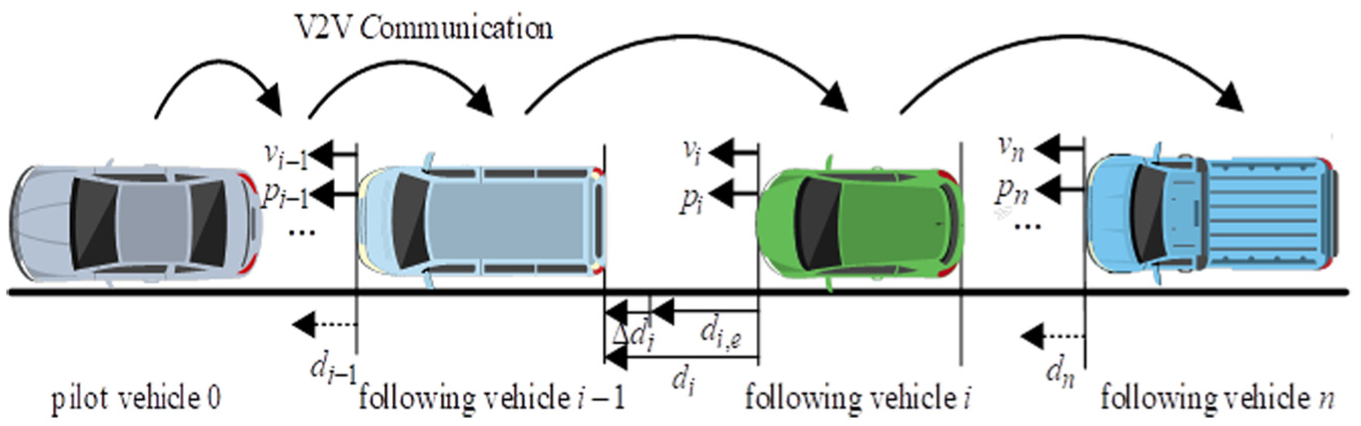
Vehicle queue cruise diagram.
Artificial Potential Field Method in Vehicle Queue
The classic artificial potential field was proposed by Khatib to solve the obstacle avoidance problem for robots ( 18 ). The method involves defining the environment by potential fields, in which the moving robot moves, constructing an artificial potential field that combines the attractive force field of the target position and the repulsive force field of obstacles. The attractive force in the field attracts the moving object toward the target position, while the repulsive force in the field prevents the moving object moving toward the direction of obstacles. By using the classic artificial potential field method, the following potential field functions are introduced to describe the problem of vehicle queues.
The attractive potential field function of the ith vehicle is:

where
The attractive force acting on the

where
The repulsive potential field function of the

where
The repulsion force acting on the

Because of the better performance of traditional artificial potential field methods in static environments, but poorer control effects on moving objects in dynamic environments, considering the parameters such as vehicle speed and acceleration, an improved artificial potential field function is obtained ( 19 ).
The attractive force potential field function of the

where
The attractive force acting on the

The repulsion force potential field function of the

where
The repulsion force acting on the th vehicle is:

Expected Vehicle Spacing Model Based on the Artificial Potential Field Method
The goal of vehicle queue control is to maintain a desired following distance of
The constant vehicle spacing model is:

where
In the constant vehicle spacing model, the distance among vehicles remains constant and is independent of the road environment and the speed of the vehicle. This model is simple to calculate but cannot meet the actual needs of vehicle driving.
The variable vehicle spacing model can be divided into a constant vehicle time-distance model and a variable vehicle time-distance model.
The constant time-distance vehicle spacing model is:

where
This model is designed to meet the daily driving experience of drivers under medium- and low-speed driving conditions, where the expected vehicle spacing is proportional to the speed of driving. At the same time, it effectively avoids large vehicle spacing at high speeds.
The variable time-distance vehicle spacing model is:

where
Because vehicle spacing time-distance cannot be negative, and a large time-distance can lead to adjacent vehicles changing lanes and inserting, Yanakiev chose to define the vehicle spacing time-distance using a saturation function with limits of 0 and 1 to make the strategy more practical (22).

where
In an environment where cars communicate over the internet, the variable spacing model only needs to consider the impact of the preceding vehicle on the following characteristics of the vehicle. The artificial potential field method can utilize the attractive and repulsive forces of the preceding vehicle potential field to determine the expected position of the following vehicle in the next moment. Based on the expected vehicle spacing model of the artificial potential field method, the vehicle queue can strictly follow the expected state during the driving process. When there is a large empty section on the road ahead, vehicles can quickly assess the road conditions and adjust their positions to maintain the expected vehicle spacing with the vehicles in front and behind. This model improves the safety and driving efficiency of vehicle queues under cruising conditions.
Based on the variable time-distance vehicle spacing model and the artificial potential field method in the vehicle queue, the expression for the vehicle spacing is:

where
The final expression for the expected vehicle spacing is:

System Establishment of Vehicle Model
Vehicle Model without Input Saturation
According to Chen et al., a vehicle dynamics model can be established as:
where
Consider establishing a first-order model for the hysteresis characteristics of the vehicle transmission system:

where
Design feedback control law:

where
Based on the above feedback linearization strategy, a third-order vehicle dynamics model can be obtained:

where
According to the vehicle queue cruise diagram in Figure 1, the error relationship of vehicle spacing between the front and rear can be obtained:

Equations 14, 18, and 19 lead to the vehicle dynamic state equation based on the error of vehicle spacing:

where
Vehicle Queue Model Considering Input Saturation
From a control perspective, each vehicle in a vehicle queue can be seen as a particle. In the process of vehicle movement, queue control usually needs to satisfy the following three aspects: queue stability, internal stability, and scalability. Queue stability reflects that input disturbances decay along the vehicles, which is the basic requirement of queue control. If the queue is unstable, disturbances will increase along the queue, the control intensity of the following vehicles will increase, and the queue will lose stability, possibly leading to collisions. The requirement for internal stability is to make the following error decay to zero over time. Scalability means that the internal stability of the queue is not expected to deteriorate rapidly with the increase in queue size. In the actual process of vehicle queue movement, there may be subsequent vehicles joining the queue, and the queue should not lose stability because of the addition of external vehicles.
When studying CACC, the first thing is to ensure the stability of the vehicle queue. That is, during the driving process, when the acceleration of the lead vehicle (vehicle 0) changes, the following vehicle’s tracking error should converge asymptotically to zero, meaning that the acceleration of all following vehicles should decrease gradually. From the third term in Equation 18, it can be seen that, when the control input of system is set to the desired acceleration, the system is controlled by the desired acceleration. Therefore, the stability of the queue can be defined using the desired acceleration:

where
The stability condition (Equation 21) of the vehicle queue can be viewed as a saturation constraint on the input of the vehicle queue, which can be represented by an input saturation function:

where
The state Equation 20 can be rewritten as:

Design of Adaptive Controller Based on Backstepping
The goal is to design a controller for a vehicle queue system (Equation 23) with multiple disturbances and input saturation constraints, and the controller should meet the following requirements: 1) make the following vehicle track the preceding vehicle with zero error or sufficiently small error and 2) ensure the stability of the closed-loop system, that is, all signals and errors are bounded.

For each

The controller design process is as follows.
Define the following error variables:

where
Step 1: Define the tracking error.

For the first error subsystem (Equation 27), the Lyapunov function is defined as:

The derivative of

Take the virtual control signal as:

where
Introduce Equation 30 into Equation 29:

The hyperbolic tangent function is applied to the saturation function (Equation 22), and Equation 22 can be equivalent to:

where


According to Tong et al., it can be known that the bounded function

The state Equation 23 can be transformed into:

where
Step 2: The derivative of

For the second error subsystem (Equation 37), the Lyapunov function is defined as:

where
The derivative of
where

Set the virtual control signal and the adaptive law as:


where
Because:

Introduce Equations 41–43 into Equation 39:

Step 3: The derivative of

The Lyapunov function is defined for the entire system as:

where
The derivative of
Take control signal and adaptive law as:


where
Because:

Substitute Equations 48–50 into Equation 47:

where
Definition:

By Lemma 1:


When
Simulation and Results Analysis
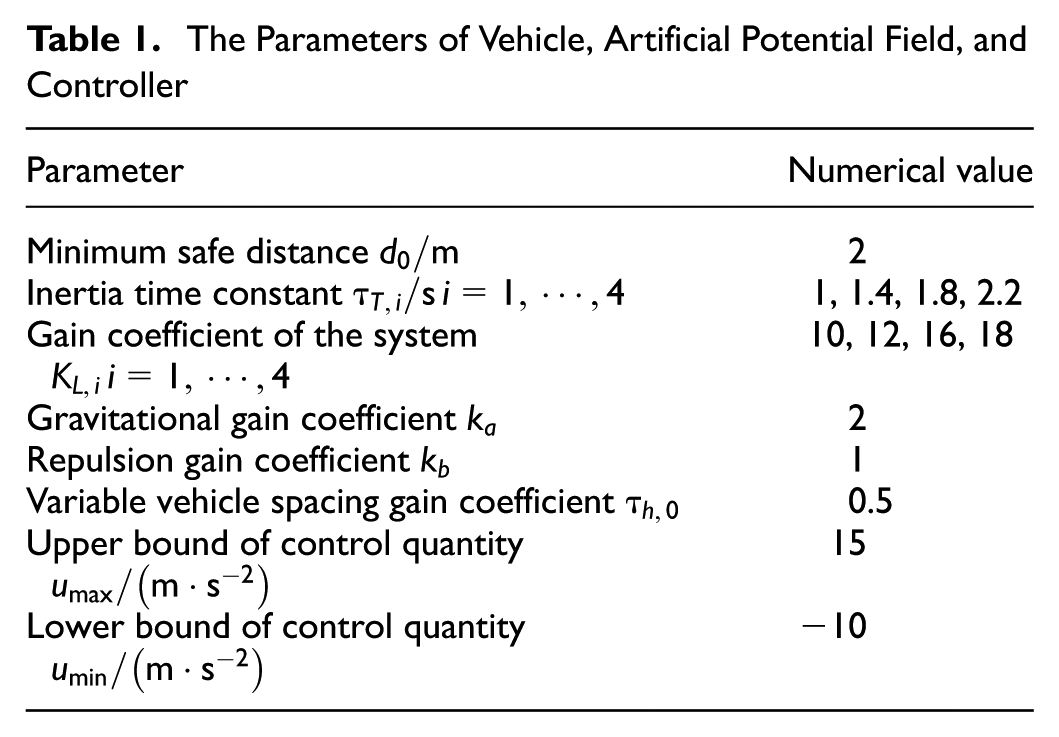
In the Matlab/Simulink environment, a vehicle queue model is established containing five cars. Simulation is done for the designed backstepping adaptive controller under two different road conditions. The parameters used for the vehicles and controllers are shown in Table 1.
The Parameters of Vehicle, Artificial Potential Field, and Controller
Cruise Control Condition
Under the constant speed cruising condition, the speed of the lead vehicle (vehicle 0) is set to
To more clearly analyze the impact of the four control methods on the tracking performance of vehicle queues, root mean squared error (RMSE) is selected to evaluate the accuracy of each control method. The calculation method is as Equation 55:

where
M = the total number of predicted samples.
Simulation of Homogeneous Vehicle Queues
The parameters of the five vehicles are consistent:
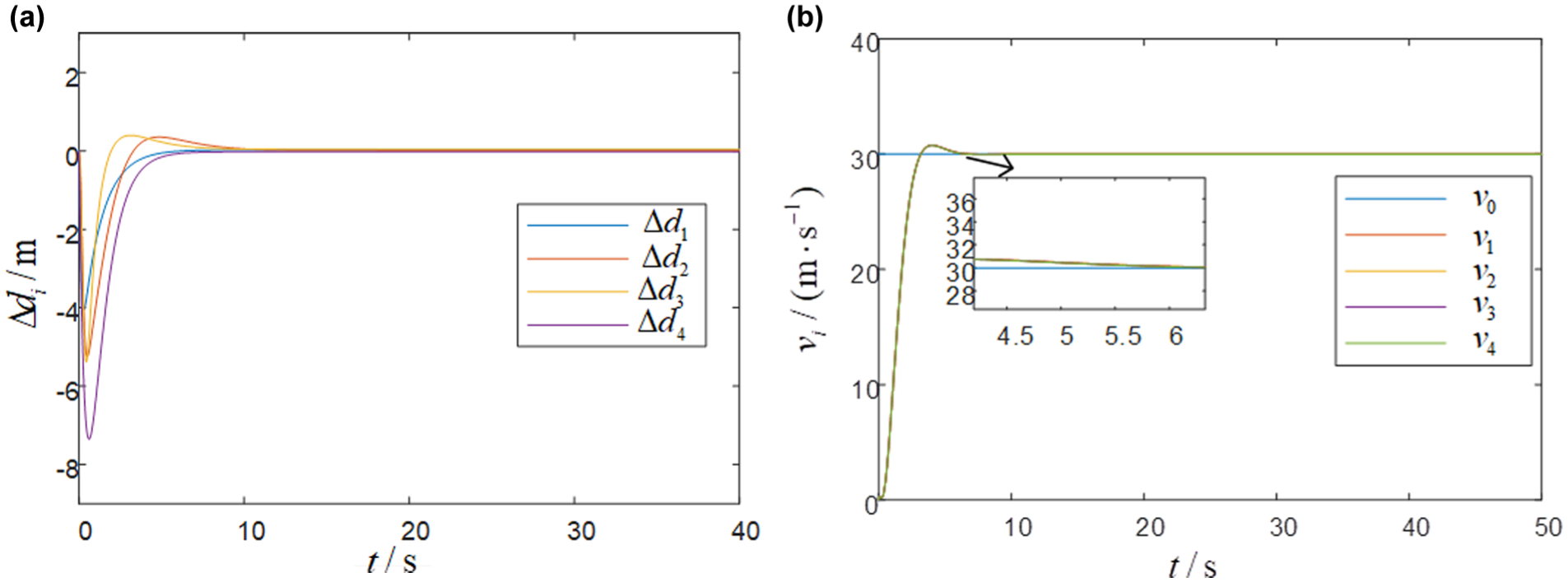
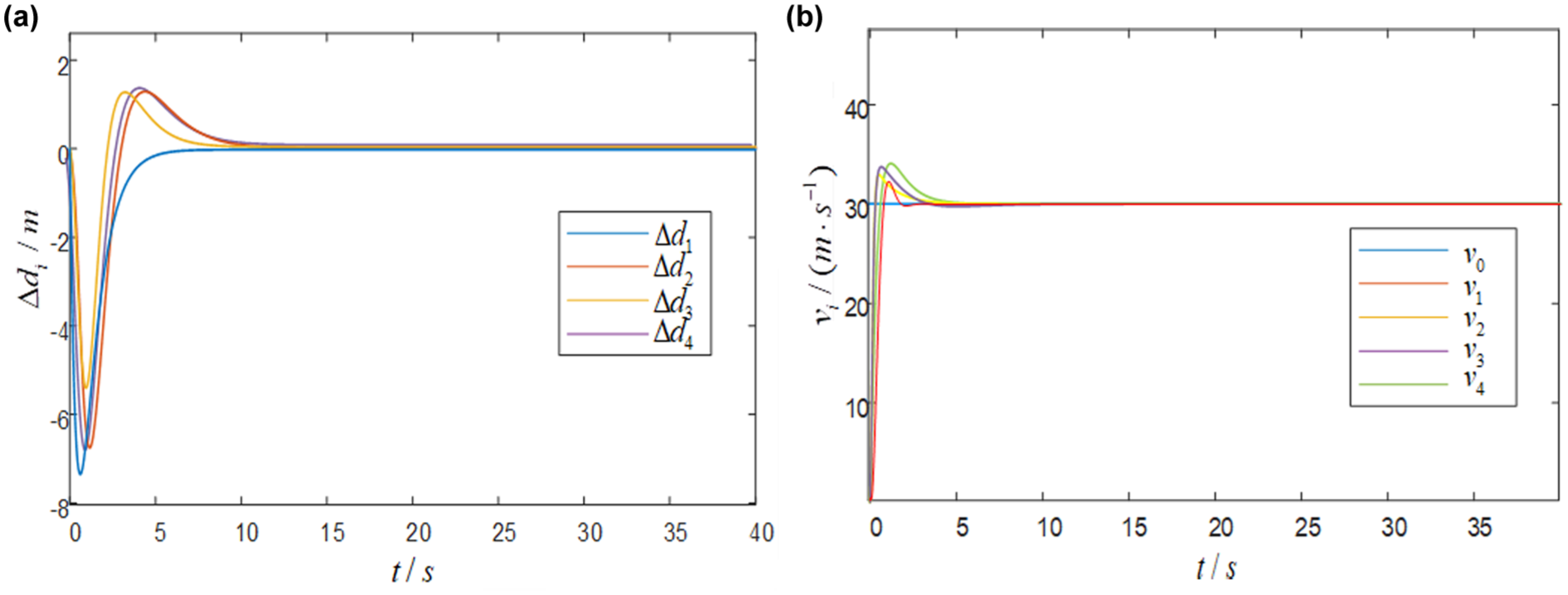
Simulation of a constant speed vehicle platoon based on backstepping adaptive control: (a) the simulation curve of following error under backstepping adaptive control and (b) the simulation curve of vehicle speed under backstepping adaptive control.
According to Figures 2 to 5, under the constant speed condition, for the simulation curve of speed, the overshoot of the optimal controller is 11.67%, the overshoot of the PID controller is 7.65%, the overshoot of the fuzzy-MPC controller is 6.85%, and the backstepping adaptive controller can reduce the overshoot to 5%. The RMSE of the optimal controller is 0.0465, the RMSE of the PID controller is 0.0297, the RMSE of the fuzzy-MPC controller is 0.0231, and the RMSE of the backstepping adaptive controller is merely 0.0121. With the action of the backstepping adaptive controller, the following error between adjacent vehicles becomes zero in 10 s, the speed is kept consistent with the speed of the lead vehicle (vehicle 0), and the asymptotic stability of the vehicle queue is achieved. Therefore, when the system is disturbed, the tracking performance of the queue is not affected, and the stability of the queue is ensured by using input saturation.
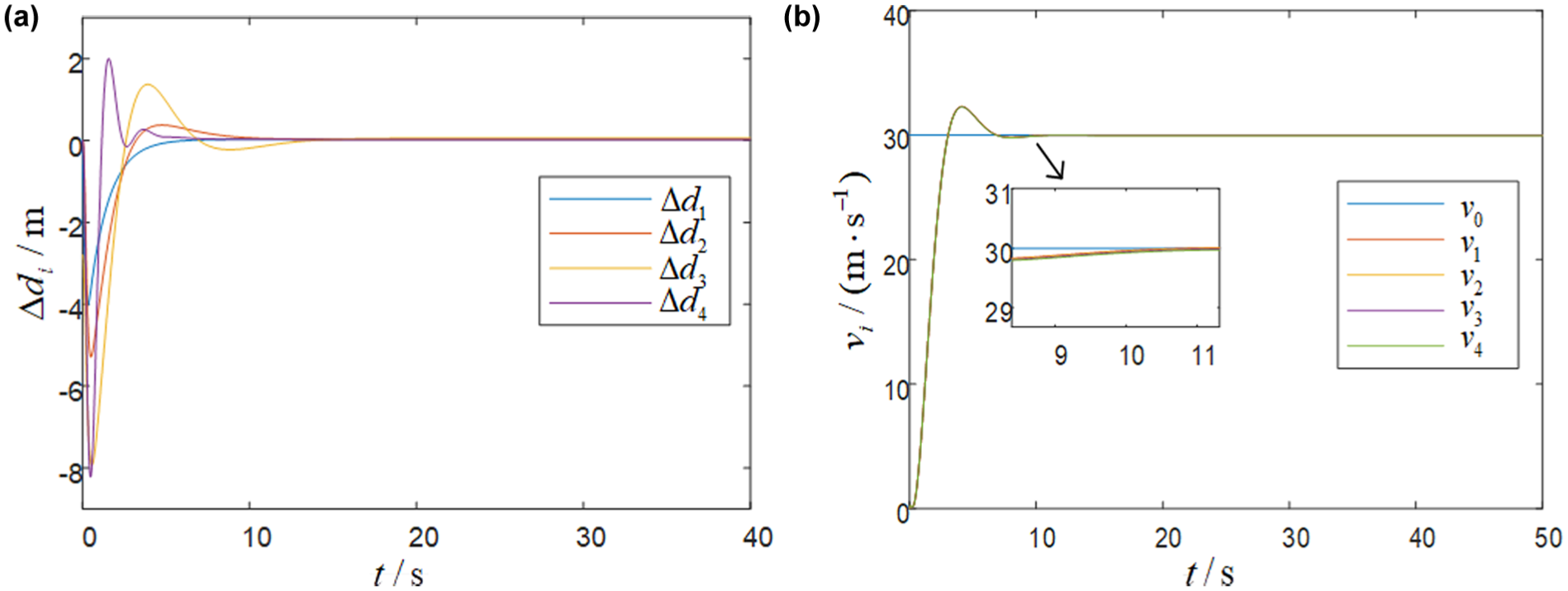
Simulation of a constant speed vehicle platoon based on optimal control: (a) the simulation curve of following error under optimal control and (b) the simulation curve of vehicle speed under optimal control.
Simulation of a constant speed vehicle platoon based on proportional-integral-derivative (PID) control: (a) the simulation curve of following error under PID control and (b) the simulation curve of vehicle speed under PID control.
Simulation of a constant speed vehicle platoon based on fuzzy model predictive control (MPC): (a) the simulation curve of following error under fuzzy-MPC and (b) the simulation curve of vehicle speed under fuzzy-MPC.
Simulation of Heterogeneous Vehicle Queues
Considering the actual working conditions, where vehicle types are different, heterogeneous vehicle queues were considered. On the basis of Table 1, the controllers as:
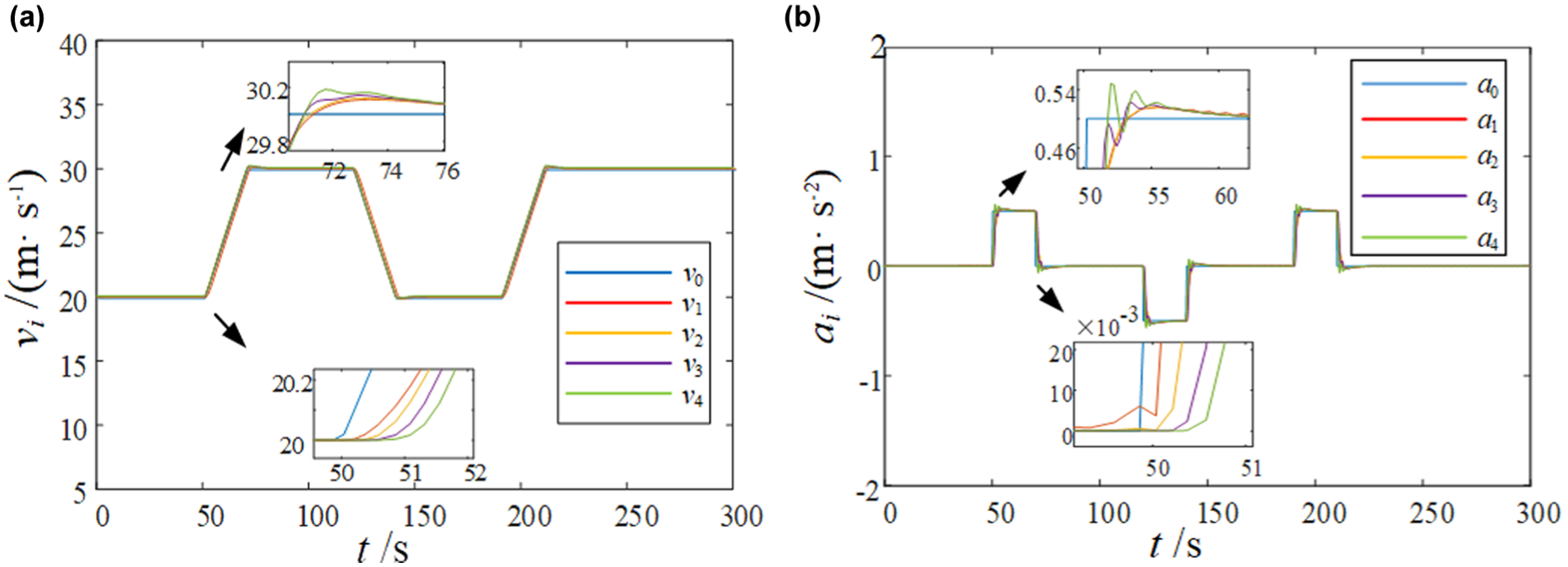
Simulation of heterogeneous vehicle platoon based on backstepping adaptive control: (a) the simulation curve of vehicle speed under backstepping adaptive control and (b) the simulation curve of vehicle acceleration under backstepping adaptive control.
According to Figure 6a, it can be seen in the first 50 s that the string is in a state of constant velocity. At 50 s, vehicle 0 begins to accelerate with an acceleration of
Adaptive Adjustment of Vehicle Spacing under Adaptive Cruise Control (ACC) Conditions
The cruise condition with adaptive adjustment of the vehicle spacing is as follows. At the initial moment, the
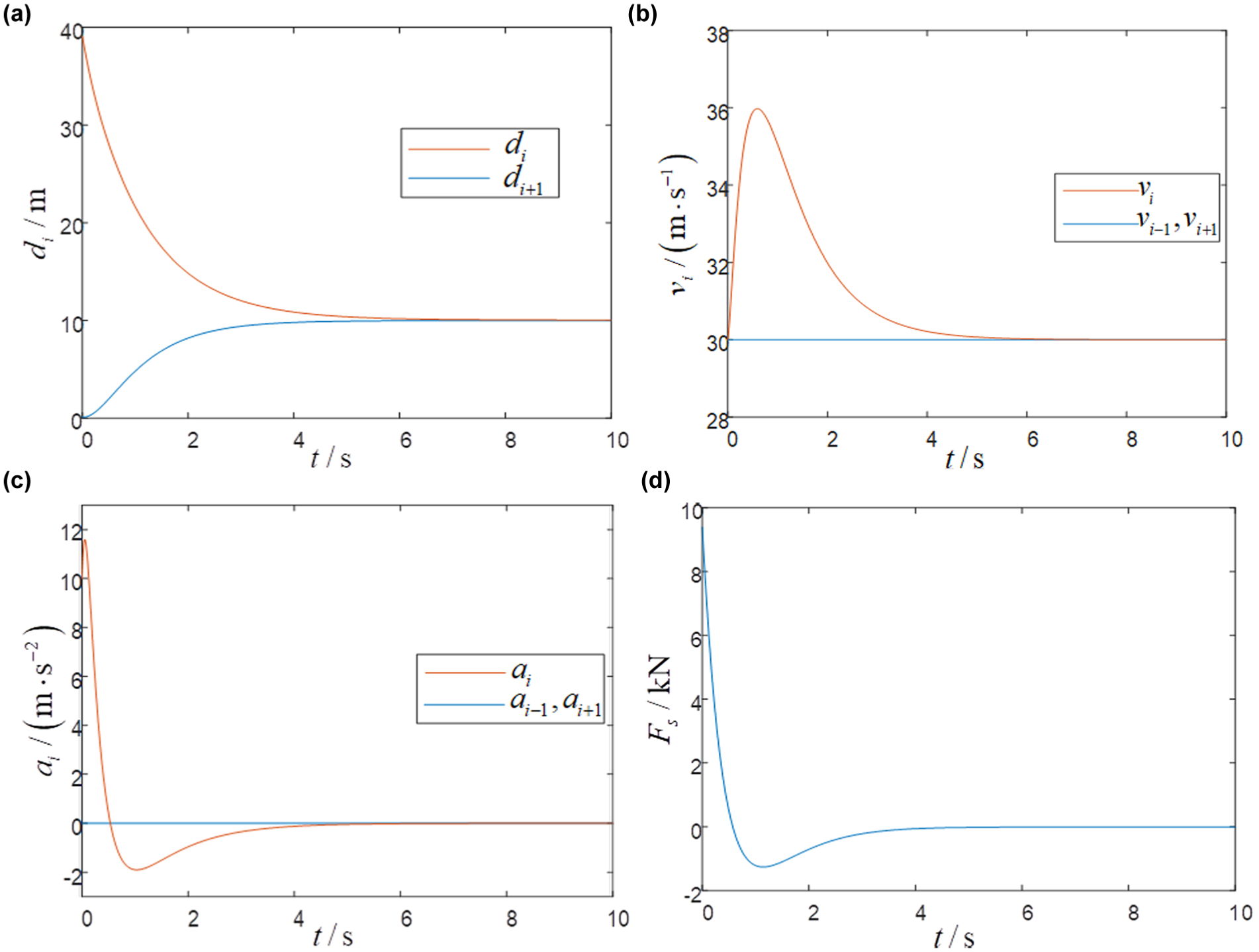
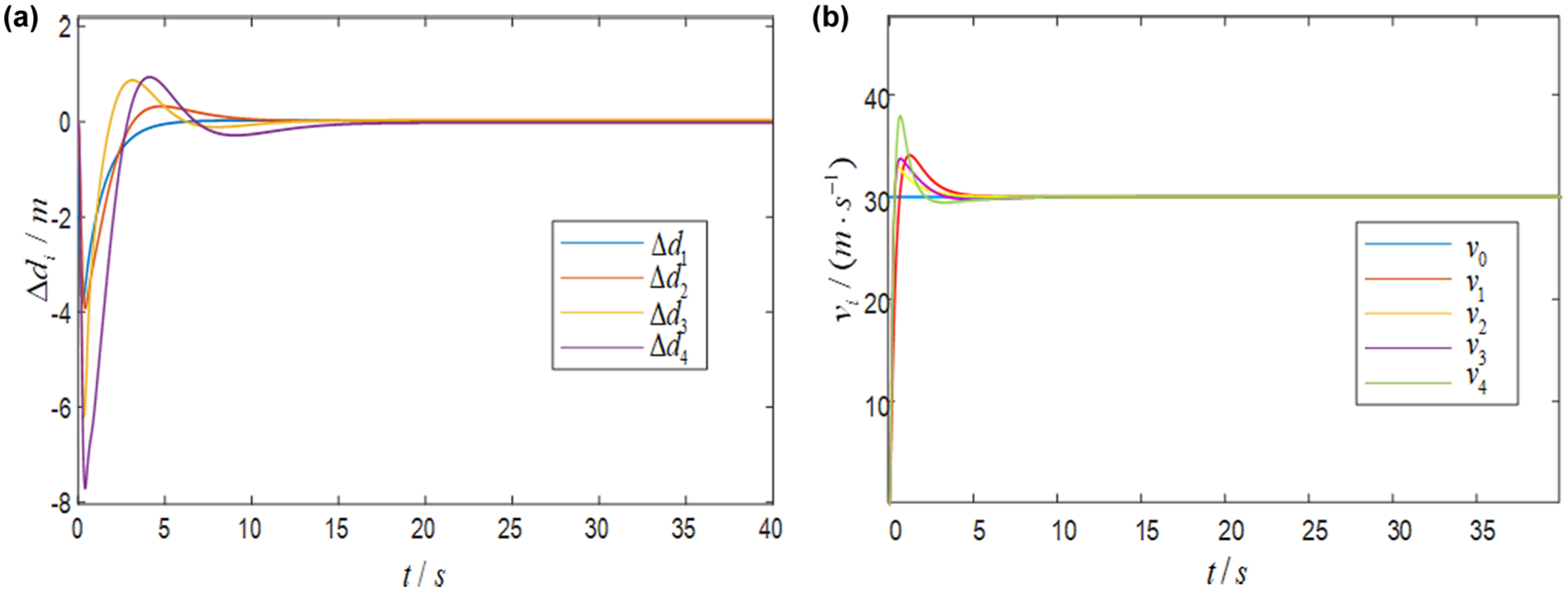
The simulation curve of adaptive adjustment of vehicle spacing under cruise conditions: (a) simulation curve of the distance between the
From Figure 7, it is shown that the
Conclusion
In this paper, a backstepping adaptive control approach is proposed that utilizes saturation constraints and artificial potential field to solve the tracking problem of vehicle queues with multiple disturbances. The artificial potential field method is introduced to build an expected vehicle spacing model, allowing the current vehicle to adjust its position based on the actual distances between vehicles in front and behind. Saturation constraints are used for the control signals to enhance the stability of the vehicle queue. The virtual control laws and adaptive laws are designed by the backstepping method to eliminate various unknown disturbance in the system, thereby the robustness of the system is improved. The proposed method demonstrates a strong ability to overcome unknown disturbances, and the rapid stabilization of the vehicle queue is achieved. Simulation results show the effect of the proposed control method.
There are major advantages of the proposed work. The artificial potential field method is introduced to build an expected vehicle spacing model, allowing the current vehicle to adjust its position based on the actual distances between vehicles in front and behind. Saturation constraints are used for the control signals to enhance the stability of the vehicle queue. The virtual control laws and adaptive laws are designed by the backstepping method to eliminate various unknown disturbance in the system, thereby the robustness of the system is improved.
There are some limitations to the proposed work. In V2V communication, the information is exchanged only between the front and rear vehicles of the queue, so the scheme cannot to be used for queue control with communication failures and time delay situations.
In future research, the topology structure of the queue will be considered, and the impact of communication failures and time delays on queue stability will be studied further.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: W. Zhongqiang, Z. Shanshan; data collection: Z. Shanshan; analysis and interpretation of results: W. Zhongqiang, Z. Shanshan; draft manuscript preparation: W. Zhongqiang, Z. Shanshan. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Provincial Key Laboratory Performance Subsidy Project (Grant No. 22567612H).
Data Accessibility Statement
The data and materials are availability by request.