
Abstract
This study introduces a data-driven framework that integrates kinetic energy principles into proactive intersection safety management. Building on the Federal Highway Administration’s (FHWA) Safe System for Intersection (SSI) model, this research proposes the Kinetic Velocity Index (KVI), a model calibrated using categorized crash data to better represent the physical dynamics of intersection crashes. Unlike the SSI model, the KVI estimates the probability of fatal and serious injuries (FSIs) at the crash level, simplifying application while preserving alignment with safe system principles. The study used over 900,000 two-vehicle intersection crashes from the years 2013 to 2024. The model was developed using data from Georgia and validated with an external dataset from Massachusetts. The KVI maintained strong predictive performance (R2 = 0.991 in Georgia; R2 = 0.922 in Massachusetts), demonstrating its generalizability. Importantly, the KVI enables proactive safety screening by estimating severity risk even at locations with no prior FSIs, offering a more reliable and risk-oriented alternative to models that rely solely on past crash outcomes, which can be subject to random variation and may not reflect underlying crash risk. It also supports integration with historical data in weighted risk models. Because the KVI is easy to compute, interpretable, and built on physics-based principles, it provides transportation professionals with a more precise and scalable tool for identifying high-risk locations and evaluating the safety implications of design alternatives. Furthermore, the KVI framework is easily adaptable and can be locally recalibrated to reflect regional crash patterns, making it applicable across diverse roadway contexts.
Introduction
In recent years, there has been an increasing focus on road safety as a result of the alarming number of roadway fatalities globally, with over 1.35 million deaths annually as reported by the World Health Organization ( 1 ). In addition, traffic-related deaths are the number one cause of death for people aged 5 to 29 globally ( 1 ). In response to these issues, departments of transportation (DOTs) have created various road safety strategies aimed at reducing traffic-related injuries and deaths. Among these strategies, the proactive Safe System Approach was started in Sweden and has gained significant traction in many countries. Using this system Australia has seen a 47% decrease in traffic fatalities, similarly, New Zealand a 48% reduction, Spain an 80% reduction, and Sweden a 67% reduction ( 2 ). The Safe System Approach initially started in 1997 with the Swedish parliament supporting the Swedish government’s declaration of their stated goal: “no-one shall be killed or seriously injured in road traffic” ( 3 ). In alignment with global Safe System principles, many U.S. states, including Washington, have adopted frameworks that emphasize multimodal accessibility and safe land use as core components of roadway safety policy ( 4 ).
Tenets of the Safe System Approach
The Safe System Approach is built around five core principles: safer vehicles, postcrash care, safer roads, safer people, and safer speeds. Safer vehicles refer to features such as automatic emergency braking, lane-keeping assist, adaptive cruise control, and enhanced crashworthiness through improved design and materials ( 5 ). Postcrash care involves rapid emergency response, efficient crash site clearance, and high-quality trauma care, all of which can significantly reduce injury severity and improve survival outcomes ( 1 ). Safer roads are supported by multimodal transportation planning and coordinated land use strategies that encourage walking, cycling, and public transit, contributing to both road safety and climate change mitigation by reducing emissions and dependence on fossil fuels ( 6 ). The safer people tenet emphasizes responsible behaviors by road users, including adherence to traffic laws, use of seat belts and helmets, sober driving, and participation in public safety education campaigns ( 7 ).
The primary focus of this paper is on safer speeds, which involves managing road design and vehicle interactions to reduce crash severity. This includes proactive measures such as improved road geometry, traffic calming, energy-absorbing barriers, and clear signage. Central to this concept is kinetic energy management, designing roads to limit the transfer of energy during a crash to reduce injury risk ( 8 ). This study also supports safer roads, as kinetic energy can be managed through design interventions such as modifying turning movements, even without directly lowering speeds. The Safe System Approach promotes proactive rather than reactive interventions, acknowledging that serious crashes can occur unpredictably, even in areas with little or no crash history. Therefore, kinetic energy management should be considered in all areas with potential for road traffic injury ( 9 ). In addition, the approach is grounded in the understanding that human error is inevitable, and therefore crashes are also inevitable. As a result, systems should be designed to limit the resulting harm by minimizing crash forces ( 3 ).
Minimizing Kinetic Energy
While reducing kinetic energy is a well-founded strategy for lowering the risk of fatal or serious injuries, quantifying crash severity risk based on kinetic energy remains challenging. The theoretical kinetic energy of a collision can be easily calculated if the vehicle masses, collision angle, and vehicle speeds are known. However, applying this theory in practice is challenging, as it is nearly impossible to predict the location, angle, vehicle types, and speeds involved in future crashes.
Furthermore, if it was possible to predict the future physical characteristics of a crash, it would still be challenging to determine if a crash would result in a fatal or serious injury. For example, a collision where the driver’s side door was affected would have a different impact than a collision that affected the driver’s side front fender despite those locations being very close. These issues have historically posed challenges when trying to understand how altering road characteristics affects crash severity by looking through the lenses of kinetic energy.
To provide a solution to this problem many DOTs, researchers, and transportation professionals have tried to determine methods of calculating the kinetic energy of conflict points and correlate that to crash severity. Currently, the Federal Highway Administration (FHWA) recommends using the theoretical change in velocity between two velocities as part of the Safe System for Intersections (SSI) approach ( 8 ). This paper will specifically focus on the FHWA’s recommendations for two-vehicle collisions; however, there are different methods for calculating collisions with pedestrians and nonmotorized vehicles.
Calculating Probability of Fatal or Serious Injury Based on Kinetic Energy
To address the variability in crash angles and speeds, the SSI model was developed, recommending a standardized set of parameters to estimate the theoretical change in velocity between two vehicles ( 8 ). The FHWA outlined this model in its paper “A Safe System-Based Framework and Analytical Methodology for Assessing Intersections” and acknowledged that there is limited research on the speeds at intersections and severities of crashes. Furthermore, it stated these assumptions, and the overall model should be adjusted on future data, which is the goal of this study.
The speeds the FHWA recommends using in the “Safe System-Based Framework and Analytical Methodology for Assessing Intersections” have a high-end and a low-end value for recommendations. It recommends using 90% to 110% of the posted speed limit (PSL) for a major road and 70% to 100% of the PSL for a minor road. It uses a speed of 10 mph to 30 mph for a vehicle traveling left and 10 mph to 20 mph for a vehicle traveling right. For this study, no data were available on which roadway was the major roadway, so the PSL in the direction the vehicle was traveling was used to evaluate the model which falls within the recommendations.
Like the recommended speeds, the model also specifies assumed angles for certain collision types. By standardizing these angles, the methodology becomes more practical and user-friendly for transportation professionals, as it removes uncertainty in estimating crash dynamics and supports system-level safety assessments. Specifically, the model recommends using an angle between 220 and 240 degrees for left-turn-related collisions, and 45 degrees for merging collisions, such as a vehicle turning right from a minor approach onto a major road.
After the parameters for the project are determined, the following Equation 1 is used to get the theoretical change in velocity for a two-car collision of the same mass:
where
Then once the change in velocity is found, the equation can be fitted to match the severities of real-world crashes. The current method uses Equation 2 to fit the results from Equation 1 to get the probability of a serious or fatal injury occurring:

Then calculations are made separately for vehicle and nonvehicle crashes. The current SSI method calculates the probability of a fatal or serious injury (
In the original research done by Evans (
10
) the angles and speed were chosen based on performing structural analysis on the actual crashes and had different parameters based on whether the participant was belted. To make this more applicable, the SSI method uses one value for

Limitations of the Current Methodology
The current method has several limitations. It does not account for rear-end crashes caused by vehicles stopping at control devices, such as stop signs or traffic signals. While rear-end crashes are generally less likely to result in fatal or serious injuries, they are among the most common crash types ( 11 ). The method also excludes head-on collisions, which, although less frequent, tend to result in more severe outcomes. In addition, the model has not been empirically validated using a large, real-world crash dataset, and the recommended input percentages for speeds and angles remain imprecise, leaving room for interpretation. These issues limit its practical accuracy and reliability. Although kinetic energy models have the potential to help transportation professionals assess the safety impacts of different intersection designs, there is a lack of comprehensive empirical validation and scenario coverage to support their routine application in real-world planning. Without incorporating a comprehensive range of collision scenarios and better empirical grounding, the current method may overlook critical risks associated with specific intersection movements. As a result, current kinetic energy models currently serve more as conceptual tools to support engineering judgment rather than as precise instruments for quantifying crash severity.
Goals of This Analysis
The primary objective of this study is to assess the accuracy of the FHWA’s SSI model in estimating crash severity at intersections and to introduce an improved alternative. This Kinetic Velocity Index (KVI) model is designed to enhance both the precision and the usability of crash severity predictions by incorporating categorized crash characteristics and simplifying key assumptions. In doing so, this research supports the broader goals of the Safe System Approach by advancing the practical application of kinetic energy principles in proactive roadway safety analysis.
Methodology
The methodology used in this study involved developing, calibrating, and validating the KVI model using real-world crash data. As illustrated in Figure 1, the process began with the acquisition and preprocessing of police-reported crash records, which were filtered to include only two-vehicle crashes at intersections and classified by injury severity using the KABCO scale. Georgia crash data served as the primary dataset for model development, enabling the creation of a severity prediction model based on kinetic energy principles and categorized crash characteristics. Baseline model performance was evaluated by comparing the new model to the SSI model mentioned in the introduction with its suggested parameters to use. To assess generalizability, the model was then validated using an independent dataset from Massachusetts. The final KVI model is designed to support proactive safety planning by estimating fatal and serious injury (FSI) likelihood across different crash types and roadway conditions, allowing practitioners to identify high-risk intersections and evaluate design alternatives even in the absence of prior severe crash history.
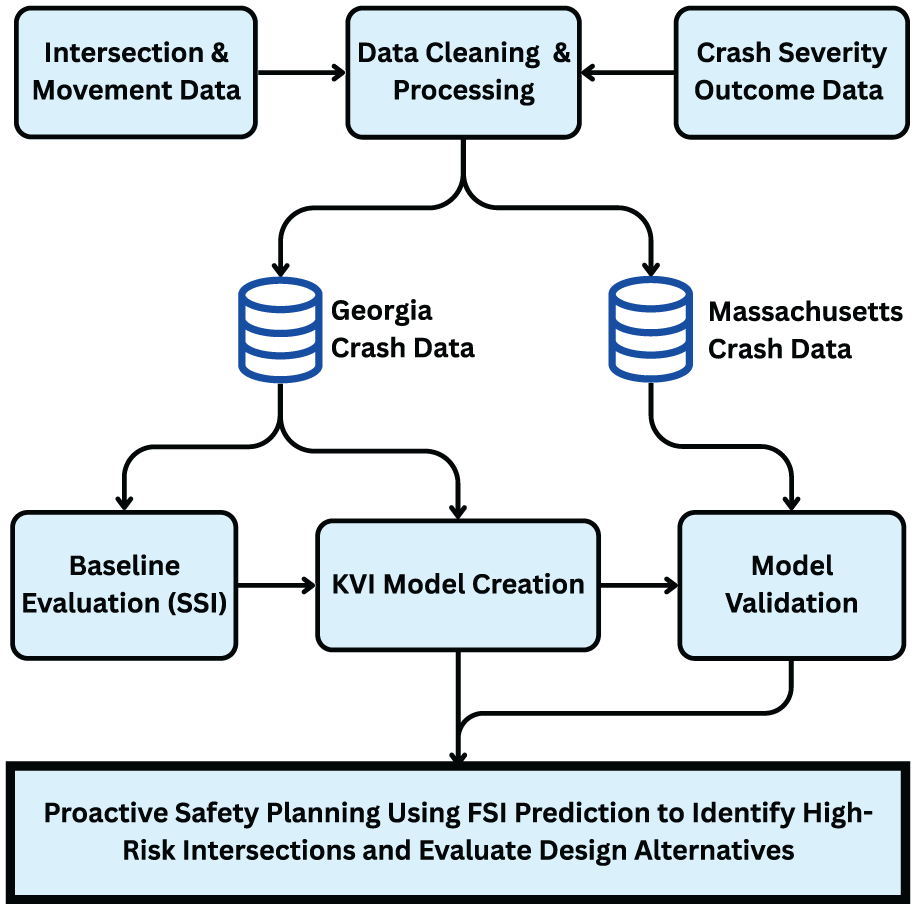
Kinetic Velocity Index model development and application framework.
Data Preparation
To conduct this analysis, over 3 million police-reported crash records were obtained from the Georgia Department of Transportation’s AASHTOWare Safety database, covering the years 2013 to 2022, with 2020 excluded to avoid biases introduced by the COVID-19 pandemic; during the COVID-19 pandemic crash fatality rates increased drastically because of increased speeding behavior ( 12 ). This dataset includes detailed crash characteristics such as collision type, severity, location, and PSLs. Initial filtering narrowed the dataset to crashes involving exactly two vehicles at roadway intersections. Roundabout crashes were excluded as a result of insufficient sample size to evaluate the methodology effectively for those configurations. Crashes occurring on the following speed limits were collected: 25, 35, 45, or 55 mph. Then the crashes were further categorized by collision type (e.g., left-angle, right-turn angle, rear-end, and head-on). Pedestrian and cyclist crashes were excluded, as the study focuses exclusively on vehicle-to-vehicle collisions. After applying all filters, the final Georgia dataset contained over 700,000 crashes suitable for model development and calibration.
To validate the KVI model using external data, police-reported crash records from Massachusetts for the years 2021 through 2024 were obtained and combined into a single dataset. The raw dataset included all reported crashes, and while some field names and classification structures differed slightly from those in the Georgia dataset, equivalent variables were identified to ensure the filtering process was as consistent as possible. First, only crashes that occurred at intersections were retained by selecting those with roadway junction types classified as four-way intersections, T-intersections, Y-intersections, or five-point (or more) intersections. The dataset was then limited to crashes involving exactly two vehicles to ensure consistency in kinetic energy calculations. To further verify that selected crashes occurred at legitimate intersection locations, only those with an associated traffic control device (i.e., stop sign, signal, or yield) were included. This step was not intended to reduce the likelihood of misclassified locations that are not applicable to the study (e.g., driveways, private roads, or nonintersection-related junctions erroneously coded as intersections). In addition, crashes involving nonmotorists, such as pedestrians or cyclists, were removed by excluding records with nonmotorist classifications. Because of limited sample sizes at higher-speed intersections, the Massachusetts dataset was restricted to crashes occurring at PSLs of 25, 35, and 45 mph. These filters ensured the Massachusetts dataset aligned closely with the parameters used in the Georgia model and supported a valid comparison of predicted and observed injury severities. After filtering the data there were approximately 100,000 crashes. The data were collected using Massachusetts’ publicly available open data source ( 13 ).
Determining Severity
After filtering, crash severity was classified using the KABCO injury scale, which is standard across both Georgia and Massachusetts police-reported crash data. For the purposes of this study, a crash was considered to involve an FSI if it was coded as severity K or A. Specifically:
K: Fatal Injury
A: Incapacitating Injury/Suspected Serious Injury
B: Nonincapacitating Evident Injury
C: Complaint/Possible Injury
O: No injury (property damage only crash)
It is a commonly noted limitation that injury severity reporting can be inconsistent, particularly for crashes involving pedestrians and cyclists where severities are commonly underreported ( 14 – 16 ). However, severity classifications for two-vehicle motor vehicle crashes, such as those used in this study, are generally considered to be more consistent. Officers assign these classifications at the scene based on standardized definitions, although occasional discrepancies may occur. For example, a crash may be coded as an A-level injury if the individual later succumbs to their injuries after the officer has left the scene. While such inconsistencies are possible, there is no clear evidence to suggest that KABCO severity data for two-vehicle crashes are systematically inaccurate on average or underreported.
Evaluation of Baseline Model
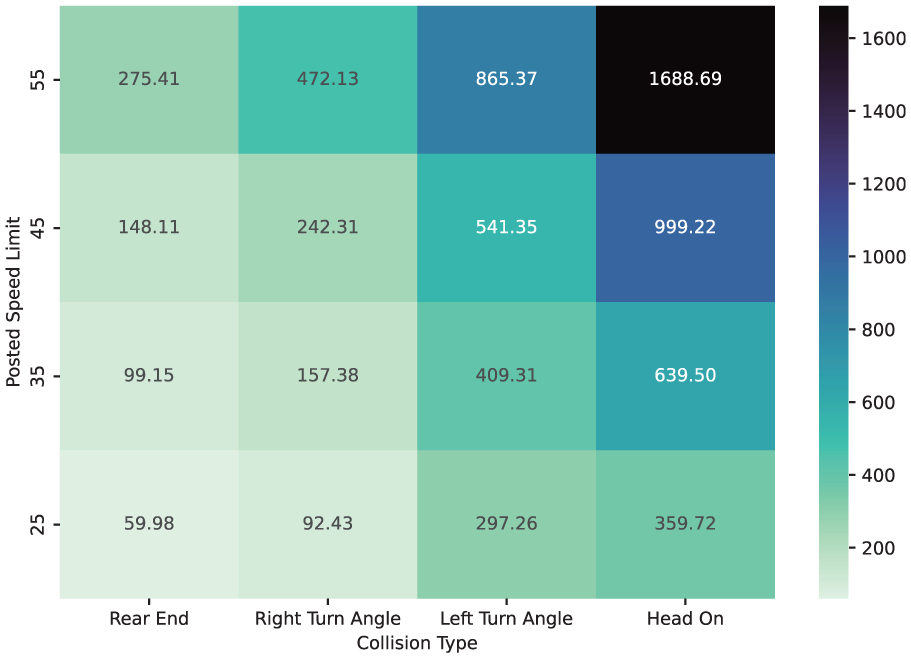
To evaluate models that predict crash severities, it is essential to compare their predicted outcomes with real-world crash data. Specifically, this study looks at the approach laid out in A Safe System-Based Framework and Analytical Methodology for Assessing Intersections created by the FHWA. To find the actual percentage of crashes that resulted in the FSI model, the number of crashes of severities K or A were divided by the total number of crashes for each PSL and manner of collision for this dataset. To better visualize these data, they were organized into a heatmap with the PSL and collision type (Figure 2).
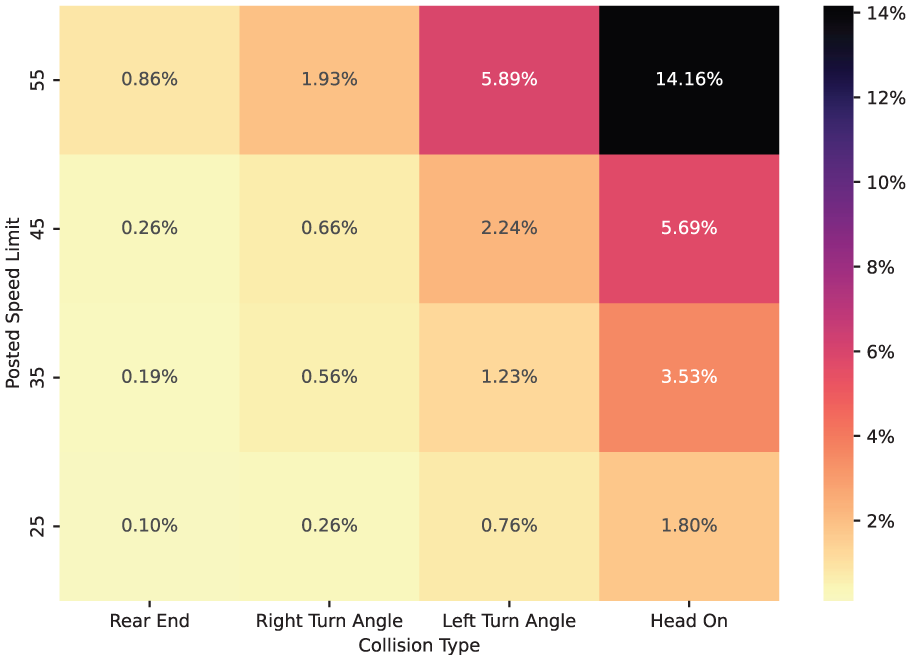
Percentage of crashes resulting in a fatal or serious injury by collision type and posted speed limit.
The heatmap is organized by PSL, which means vehicles were not necessarily traveling at the full PSL at the time of the crash. As a result, the heatmap provides a useful approximation of how crash severity is associated with posted speed and collision type, but it does not reflect the exact conditions of individual crashes. As expected, higher PSLs were strongly correlated with an increased percentage of crashes resulting in a fatal or serious injury. Furthermore, the severities changed significantly with crash types with the crashes that happen at angles closer to 180 degrees (such as in head-on collisions) being more severe and the crashes happening at 0 degrees (such as rear end) being less severe. A right-turn angle collision occurs when a vehicle turning right makes contact with another vehicle traveling straight through the intersection. It is distinct from a rear-end crash, where one vehicle strikes another from behind, and a head-on crash, which involves two vehicles traveling in opposite directions. It is also distinct from a sideswipe collision, which typically involves two vehicles traveling in the same direction with minimal angular impact, rather than a direct perpendicular or crossing path.
Evaluating the SSI Methodology Predictions versus Empirical Crash Data
As stated earlier in the introduction, the current method makes assumptions that left-turn angle crashes happen at 220–240 degrees and right-turn angle at 45 degrees. Since in the equation to calculate the change in velocity the cosine of the angle is used, using the values 140–120 for left-turn angle crashes and 315 for right-turn angle crashes would yield equivalent results. The PSL can also be used for the through movements. In addition, using the speed 10–30 mph for the vehicle turning left and 10–20 mph for the vehicle turning right is encouraged. To evaluate the current method, the median values were used (20 mph for vehicles turning left and 15 mph for vehicles turning right).
For left-turn angle crashes, the model assumes impact angles between 220 and 240 degrees, while right-turn angle crashes are assigned a 45-degree angle. Because of the cosine function used in the change-in-velocity equation, equivalent results can be obtained by using angles of 120–140 degrees for left turns and 315 degrees for right turns. The model also recommends using the PSL for through movements, and speeds ranging from 10 to 30 mph for vehicles turning left and 10 to 20 mph for those turning right. In this evaluation, median values within those ranges, 20 mph for left-turning vehicles and 15 mph for right-turning vehicles, were used to standardize the inputs.
Equation 4 is an example calculation for the change in velocity for a left-turn angle collision happening at 55 mph with these assumptions using the previous equation for change in velocity:

Now the results from the previous equation can be plugged into Equation 2 to get the predicted severity per vehicle as

Then finally the results from Equation 5 can be plugged into Equation 3, which calculates the probability as

This process was repeated for each speed limit and used the formulas for the both the right-turn and left-turn angle of collision. These values were then compared with the actual percentage of crashes resulting in a fatal or serious injury. In addition, the 95th percentile confidence intervals were calculated using a Z value of 1.96 for the actual values. That way it could be seen if the values were reflective of the likely range and the measurement considers the sample size. Figure 3 shows that there is a large discrepancy between the prediction from the SSI model and the actual values. Although the SSI model is reflective in trend to the actual severities, the actual values are not close, with the SSI model being more than double the 95th percentile confidence for actual crashes in most ranges.
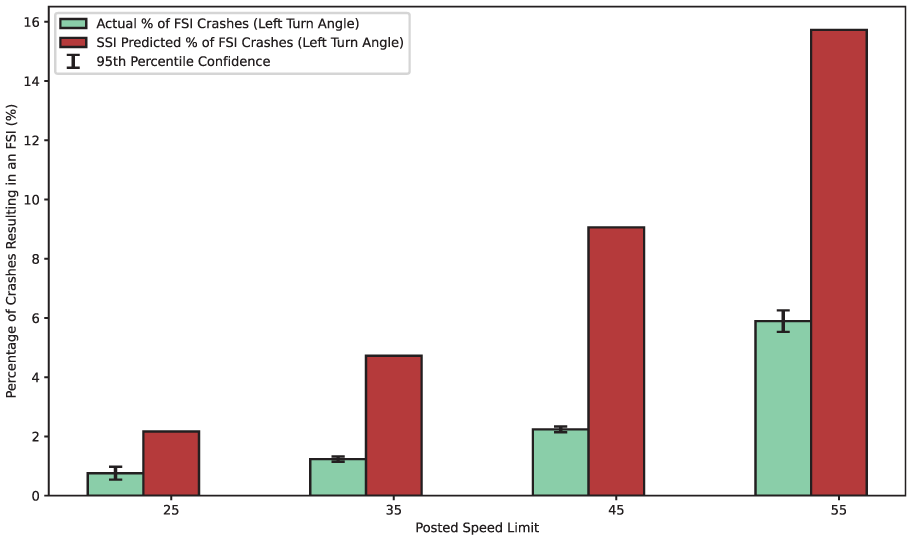
Actual versus predicted percentage of left-turn angle crashes resulting in a fatal or serious injury for the Safe System for Intersections model.
This process was redone for right-turn angle crashes (Figure 4) and the same general trend was found, however, at the lower speed limits this model seemed to be close to the actual values.
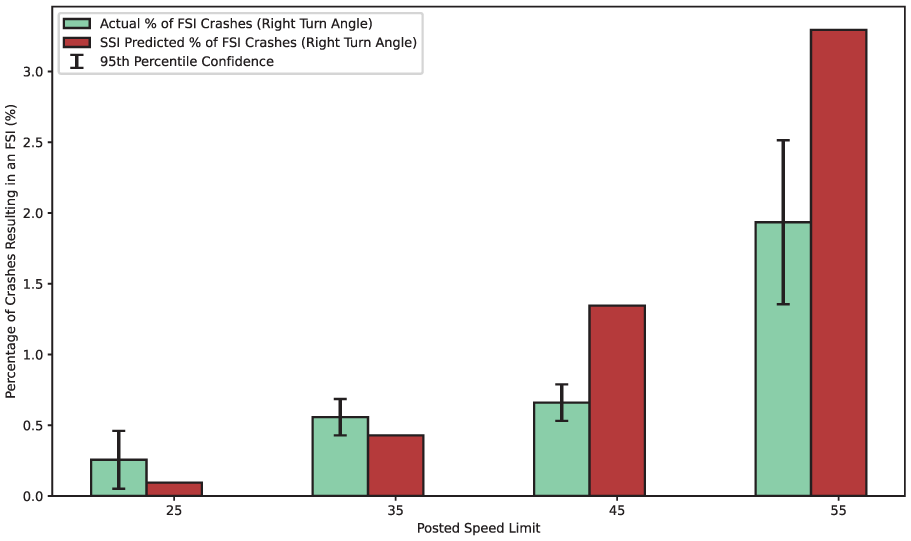
Actual versus predicted percentage of right-turn angle crashes resulting in a fatal or serious injury for the Safe System for Intersections model.
Comparison of SSI Model Predictions with Observed Crash Severity Data
The SSI model builds on prior Safe System research by applying kinetic energy principles to intersection crashes. While the general trend predicted by the model aligns with observed data, that is, crash severity increases with speed and impact angle, the absolute values differ significantly.
The first potential reason could be that FSIs were overrepresented in the original dataset used. In the original work it was stated that the values were based on FARS dataset and the CRSS dataset. The FARS dataset contains data on every fatal crash in the United States, and the CRSS contains a nationally representative sample of crashes of all severities ( 8 ). Since the CRSS database is a subset of all crashes in the United States and the FARS dataset contains all data, it is possible that using both datasets made it seem like a higher percentage of crashes were fatal. The CRSS dataset could have potentially underestimated the total number of crashes, while the FARS dataset contained every fatal crash. This could also have potentially made it seem like a higher percentage of crashes were fatal. This discrepancy could lead practitioners to overestimate the likelihood of fatal outcomes in future crashes, potentially resulting in the misallocation of safety resources or prioritization of countermeasures that do not align with actual risk patterns.
The second reason is the comparison may involve fundamentally different elements creating an “apples to oranges” comparison. The method laid out by the FHWA is derived from the SSI model which did not state that the crashes were filtered to only contain those that happened at intersections. A left-turn angle collision happening at an intersection is different from a left-turn angle collision happening at a nonroadway intersection. It could be that the collisions not happening at intersections occur at much higher speeds as there is less likely to be congestion as a result of the delay of the intersections.
Although the original model laid a good groundwork for analyzing safety using kinetic energy, the values used are empirically inaccurate.
The Kinetic Velocity Index Model
A more robust and practical approach is needed to advance intersection safety analysis and address the known limitations of existing models. These include its inability to accurately reflect average crash severities at intersections, difficulty modeling common rear-end collision scenarios, and lack of applicability to head-on crashes. In response, this study proposes a refined model built on the same theoretical foundation but developed using a more representative dataset and revised calculations to improve accuracy, interpretability, and ease of use.
To do this incorporating categorical data, such as collision type (e.g., left-angle, right-angle, rear-end, head-on) and PSL, is essential for improving model accuracy and interpretability. Categorical variables allow the model to capture meaningful differences in crash dynamics without requiring granular reconstruction of individual collisions. For example, head-on and left-turn crashes typically involve higher kinetic energy transfer and greater injury risk than rear-end crashes, even at the same speed ( 17 , 18 ). Aggregating and analyzing crash data within these categories supports more robust model fitting and reduces sensitivity to outliers, particularly when vehicle-specific information (e.g., mass, braking force, or restraint use) is unavailable. Prior research has shown that categorically stratified models offer improved predictive power and practical relevance in transportation safety applications ( 19 , 20 ). This approach also ensures that the model can be easily applied by practitioners using standard crash databases, which often include categorical but not continuous physical measurements.
Theoretical Basis for the KVI Model
Kinetic energy is directly related to the severity of a crash (
11
). To calculate the kinetic energy of a car crash specifically, the kinetic energy that changes in a collision can be thought of as the kinetic energy before the collision of the cars before the collision
To simplify this equation, it will be assumed that all kinetic energy lost is absorbed by the vehicles. Although this is an oversimplification, it works for the purpose of this study, which is to find areas that could be at high risk for fatal or severe injury collisions. The equation for kinetic energy is

The kinetic energy of the system (of two cars) using the formula for kinetic energy can be shown as

where
Now using the system defined as both cars, it is possible to find the velocity of the center of mass in the system

Solving for the velocity of the center of mass yields

If


Substituting Equations 11 and

With certain assumptions it is possible to find the convertible energy in a collision. This analysis assumes a coefficient of restitution of zero, indicating a perfectly inelastic collision in which the colliding bodies do not rebound. It also assumes that the velocity of the system’s center of mass remains unchanged. Under these conditions, all relative kinetic energy is converted during the collision.
This assumption facilitates the calculation of convertible kinetic energy, as shown in

While this equation represents an oversimplification, it is appropriate for this analysis because the objective is not to model the full physical complexity of each crash, but rather to estimate crash severity potential using a scalable and interpretable metric. In this context, it is reasonable to assume that the velocity of the system’s center of mass remains constant and that energy loss is primarily attributable to the relative velocity between vehicles. These simplifications allow the model to maintain a strong theoretical foundation while remaining practical for proactive safety screening across large datasets.

Substituting Equation 15 into Equation 14 yields Equation 16, which allows the convertible kinetic energy to be found using the mass of the vehicles, the speed of each vehicle, and the angle between them:

Finally, this convertible kinetic energy could be divided by the smaller mass to get the density of the kinetic energy absorbed. This new factor

This study does not use the masses of the vehicles to simplify the calculation and make it more general; it is suggested that future research investigates the impact this may have.
Since the final equation will be fitted the ½ can be disregarded for the purposes of this study. Furthermore, to simplify the equation the masses will not be used. Following these steps, the KVI was calculated using

Furthermore, it was assumed the masses were equal. This assumption facilitates the calculation of the KVI, as shown in Equation 18. While it simplifies the underlying physics, it is justified in this context because incorporating the full dynamics of mass and momentum transfer would require detailed vehicle-specific data, including volume distributions and impact characteristics, that are rarely available in planning-level applications. Moreover, the goal of this model is not to precisely reconstruct crash physics but to develop a usable metric that reflects energy exposure in a scalable way. By assuming that the velocity of the center of mass remains constant and that all kinetic energy lost is attributable to the relative velocity between vehicles, the equation becomes practical for widespread use while still grounded in physical principles.
The KVI index will also use the units
Design Speeds
To more realistically reflect the speed at which collisions occur, the KVI model uses a design speed limit (DSL) based on the PSL. It uses 75 mph as a DSL for the PSL of 55 mph then a DSL of +10 mph for each other PSL. Although this is a marked difference, it should be noted that many crashes are caused by speeding, and it would therefore make sense that the average speed where a crash occurred is closer to the DSL rather the PSL.
In support of this, it was found that on roads with higher PSL, drivers’ speed is more even in relation to the speed limit ( 23 ). According to the Insurance Institute for Highway Safety, excessive speeding is a known factor in approximately 29% of all motor vehicle fatalities, highlighting its significant role and the assertion most crashes occur above the posted limits ( 24 ). Furthermore, the relationship between speed and crash severity is exponential; even modest increases in speed can lead to disproportionately severe outcomes. The Insurance Institute for Highway Safety states that tests have demonstrated that impacts at 50 mph or 56 mph are far more likely to result in injury or death compared with impacts at 40 mph ( 25 ). These facts underscore the need to use the design speed when modeling to best capture the likelihood of an FSI happening.
Right-Turn Angle Collisions
For right-turn angle collision, the KVI assumes an angle of 90 degrees, which is the same as the current SSI model, but it uses the DSL instead of the PSL. Since the cosine (90) is 0, the right side of the equation (after the minus sign) does not affect the result; however, it is included for clarity in Equation 19:

Left-Turn Angle Collisions
For right-turn angle collision, the KVI assumes an angle of 230 degrees, which is the same as the current SSI model, but it uses the DSL instead of the PSL, as seen in Equation 20:

Rear-End Collisions
The current SSI model has multiple different measures for rear-end types depending on the conflict point; furthermore, it does not account for rear-end crashes because of stopping. For rear-end collisions, the current KVI model assumes that one of the vehicles is stopped and the other is traveling at 70% of the DSL. This is to account for breaking before a collision, which often occurs ( 26 ). The equation could simplify to 70% of the DSL squared, however, the whole equation is included for clarity in Equation 21:

Head-On Collisions
The current SSI model does not account for crashes that are head on (happening at or near 180 degrees). For head-on collisions, the current KVI model assumes that one of the vehicles is traveling the DSL and one of the vehicles is traveling the speed limit, as shown in Equation 22:

Model Calibration and Validation
The KVI model was calibrated using observed empirical data on FSI crashes across categorized crash types and PSLs. Unlike the SSI model, which estimates injury probability for each vehicle and requires combining vehicle-level risks using joint probability (Equation 23), the KVI directly predicts the probability that a two-vehicle crash at an intersection will result in at least one FSI. This simplification eliminates the need for disaggregated per-vehicle calculations and improves usability for planning-level safety screening. The KVI values calculated then fit to observed FSI rates from Georgia crash data using a power function, similar in form to the original SSI model, but calibrated at the crash level.

The
Results
The KVI for each collision type and PSL was organized into a heatmap. This allows the KVI to be visualized across different collision types and speeds. According to the KVI values, head-on collisions are associated with the highest severity, followed by left-turn angle, right-turn angle, and rear-end collisions.
The heatmap visualization (Figure 5) illustrates the variation in severity across different types of collisions and PSLs. This visualization provides a detailed view of how the index varies with PSLs and collision types. The comparison of KVI values across scenarios shows how values vary with changes in PSLs and collision configurations.
Kinetic Velocity Index values by posted speed limit and crash type.
Evaluating the New KVI Model with Outside Dataset
The KVI model was first calibrated using crash data from Georgia, with predicted values fitted to observed FSI crash percentages across categorized intersection types and PSLs. As shown in Figure 6, the fitted model achieved strong performance on the Georgia dataset, with a coefficient of determination (R2) of 0.991 and an MSE of 0.107. To assess the model’s generalizability, it was applied without re-tuning to an external dataset from Massachusetts covering intersection-related crashes from 2021 to 2024. When evaluated on this test set, the KVI model achieved an R2 of 0.922 and an MSE of 0.296.
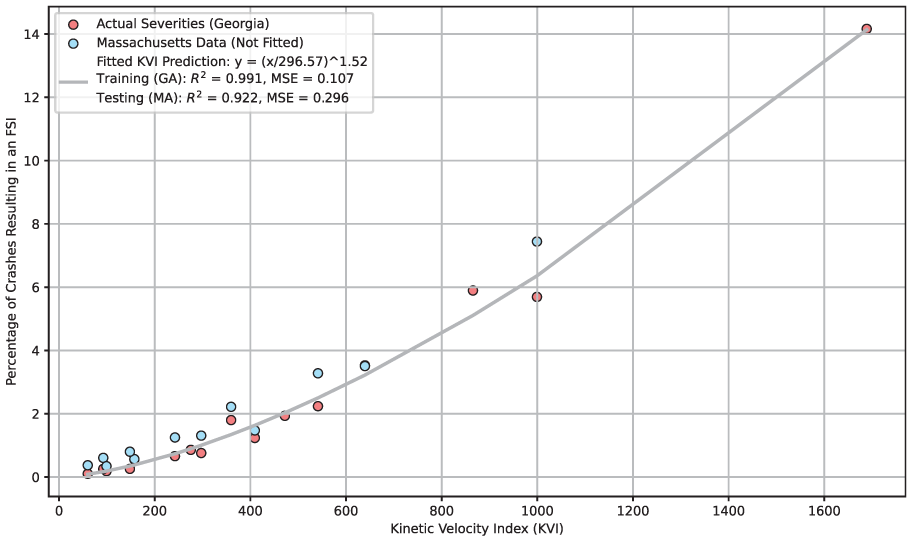
Percentage of crashes resulting in a FSI by collision type and posted speed limit.
Evaluation of Model
To better visualize how the model worked for each type of crash, the actual severity was plotted with the 95th percentile confidence intervals. The prediction based on the new KVI method was then plotted against it. This adds statistical rigor to the analysis and can show if the KVI prediction is within the confidence interval for the crash types.
Predicted Severities of Rear-End Collisions
For rear-end crashes, KVI method assumed that one vehicle was traveling at 70%. This assumption when fitted performed well and can be seen in Figure 7. The model assumes reduced impact speeds for rear-end collisions because of the common occurrence of braking before impact in such crashes. This assumption differentiates these collisions from left-turn angle and right-turn angle collisions, which are more likely to occur at higher speeds with less deceleration before impact ( 24 ). The prediction for the PSL of 45 mph is slightly higher than the upper confidence level. However, it is within .1 percentage point. The likelihood of a FSI occurring from a rear end at intersection is relatively low; however, rear-end crashes make up roughly one-third of all crashes ( 27 ). Furthermore, according to the NSC Injury Facts Overview ( 28 ), rear-end crashes account for over 37% traffic-related injuries that are caused by a collision with another motor vehicle (e.g., excluding run-off-the-road crashes, and pedestrian-related crashes).
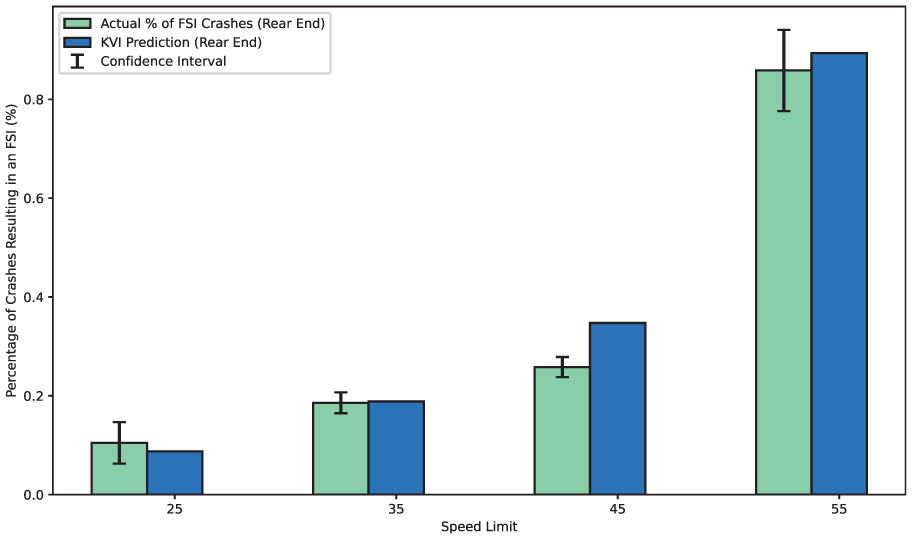
Actual versus predicted percentage of rear-end crashes resulting in a fatal or serious injury for the Kinetic Velocity Index model.
Predicted Severities of Right-Turn Angle Collisions
The KVI model was also able to model the severities of the right-turn crashes (Figure 8). Because of the smaller sample size of right-turn angle collisions in relation to rear-end crashes, the confidence intervals are notably larger.
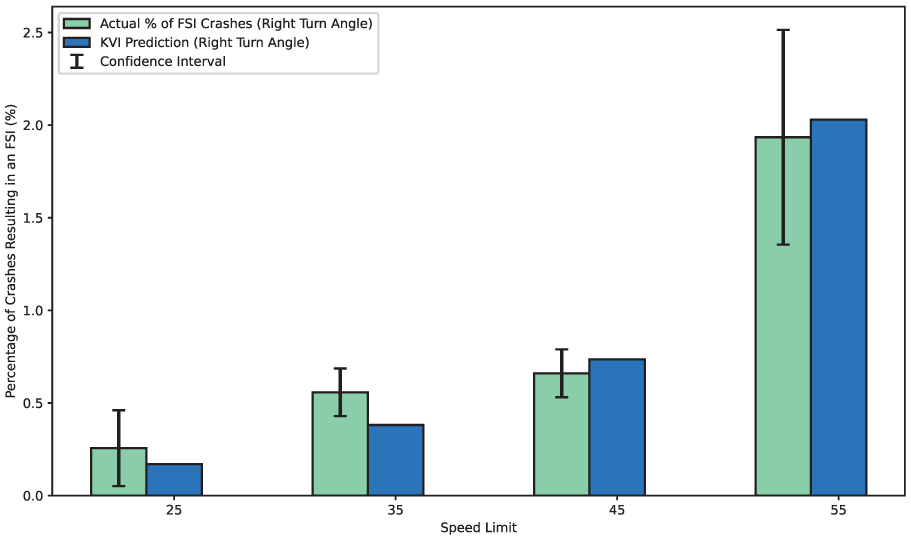
Actual versus predicted percentage of right-turn angle crashes resulting in a fatal or serious injury for the Kinetic Velocity Index model.
Predicted Severities of Left-Turn Angle Collisions
In addition, the KVI model shows a strong relationship between left-turn angle crashes and their prediction (Figure 9). However, at the upper end this model underestimates the severity for left-turn angle crashes. The model assumes that vehicles turn left at 25 mph for each PSL.
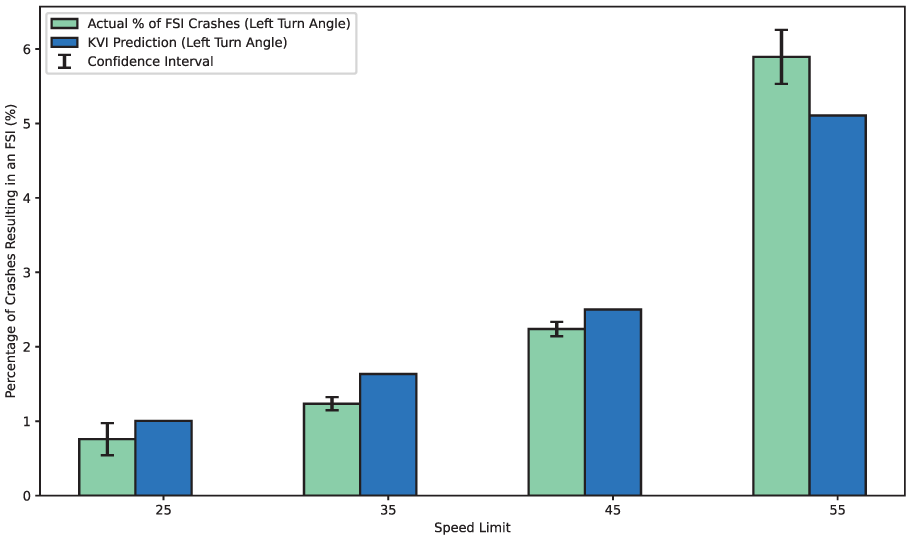
Actual versus predicted percentage of left-turn angle crashes resulting in a fatal or serious injury for the Kinetic Velocity Index model.
Predicted Severities of Head-On Collisions
The predicted percentages for head-on collisions closely match the observed values within the confidence intervals (Figure 10). The modeled percentage of a fatal or serious injury crash matches the confidence intervals closely showing it is a reliable calculation.
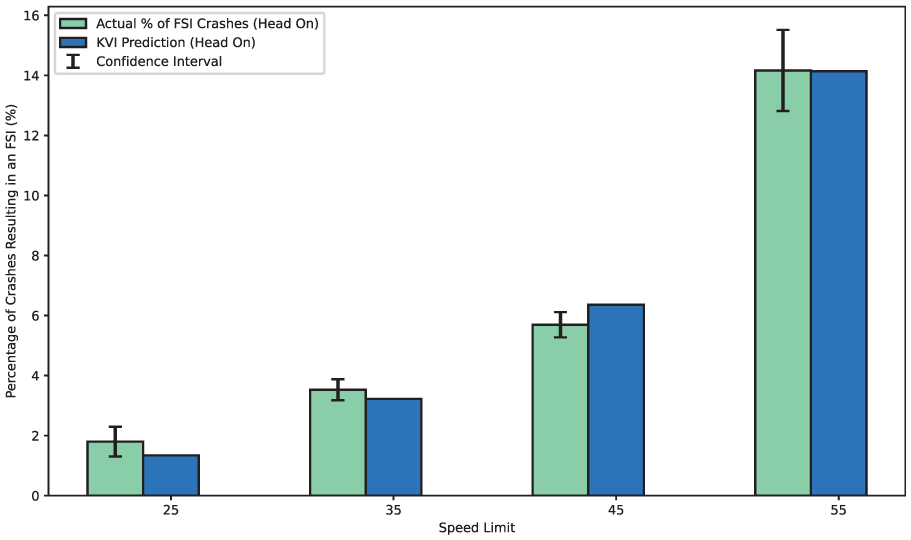
Actual versus predicted percentage of head-on crashes resulting in a fatal or serious injury for the Kinetic Velocity Index model.
Discussion
This study introduced and validated the KVI as a novel, physics-based model to estimate the likelihood that a two-vehicle crash at an intersection will result in an FSI. By leveraging kinetic energy theory and tailoring assumptions to intersection-specific crash configurations, the KVI model offers substantial improvements over the FHWA’s SSI method. Empirically, the KVI model demonstrated a markedly better fit to observed FSI crash outcomes, with an R2 value of 0.991 and a low MSE in the Georgia dataset. Notably, these performance levels were sustained during external validation using Massachusetts crash data from 2021 to 2024 (R2 = 0.922), supporting the model’s generalizability across contexts.
Unlike the SSI method, which estimates FSI risk on a per-vehicle basis and requires detailed assumptions about individual movements, the KVI streamlines the calculation by modeling risk at the crash level. This simplifies application in practice while preserving physical relevance. The KVI can be calculated using vehicle speeds and angles of impact. Once computed, the KVI value is input into a calibrated model to estimate the probability that a crash of the given type and design speed conditions will result in an FSI. The resulting value provides the probability that a crash of the given type and design speed conditions will result in an FSI. This single value can then be scaled across crash volumes or exposure counts to estimate expected harm. For instance, if 20 crashes are expected at an intersection and the
The primary strength of the KVI is its ability to estimate the severity risk of crashes even when no FSIs have occurred. Traditional safety analysis often relies solely on historical FSI data, but most crashes are nonsevere, and injury outcomes are highly random. For example, consider an intersection where five left-turn crashes have occurred over the past three years, all at a PSL of 55 mph, and all resulting in only minor injuries. Traditional safety analyses might interpret this location as low risk because FSIs have been recorded. However, the high speeds involved suggest that the potential for severe outcomes remains significant, and the absence of FSIs may simply be because of chance. The KVI helps close this gap by offering a consistent, physics-based estimate of injury risk that reflects the underlying crash energy. This allows agencies to assess locations even when only near-miss events or low-severity crashes are available, enabling more proactive safety planning.
This allows agencies to use KVI in network screening, ranking locations by estimated severity risk even without prior FSIs. In addition, KVI can be combined with observed data to create a blended risk metric using

where
The use case for expected crashes allows for the quantification of things such as near-miss data, connected vehicle data, and other safety surrogate measures. This approach helps stabilize estimates in data-sparse environments and provides a fairer basis for prioritization. Whether applied on its own or integrated with crash frequency models and conflict data, KVI offers a proactive method to identify high-risk intersections before a severe crash occurs, supporting targeted interventions and alignment with Safe System principles.
Using kinetic energy as the foundation for estimating crash severity allows for a physics-based interpretation of risk that reflects the actual forces involved in a collision. In some cases, applying system-wide average FSI rates by crash type and speed may produce results that are broadly consistent with modeled values. However, this method would offer less insights into why severity varies or how local conditions contribute to the underlying risk. The KVI addresses this limitation by linking crash outcomes directly to vehicle speeds and angles, providing a continuous, interpretable measure of energy exposure. This enables a deeper understanding of severity risk beyond historical frequencies, allowing practitioners to assess how design features or operational conditions may influence potential crash harm. Furthermore, while the KVI produced similar results in both Georgia and Massachusetts, small differences observed across datasets suggest that severity patterns can vary by context. The model’s structure allows for localized calibration while preserving a consistent theoretical basis, making it both adaptable and transferable. In this way, the KVI supports more nuanced, movement-level safety assessments that are grounded in physical principles and responsive to local roadway environments.
While the KVI model enhances practical usability, several simplifications were made to maximize its generalizability. Currently, the model assumes average vehicle mass and does not differentiate between light passenger vehicles, heavy trucks, or motorcycles. However, both mass and structural differences are known to influence crash severity. Heavier vehicles such as trucks and sports utility vehicles tend to transfer more energy in collisions, increasing the risk of injury to occupants in lighter vehicles. Likewise, motorcycles lack protective structures and are associated with disproportionately high injury risks, even at moderate speeds.
Future refinements to the KVI framework could involve stratifying crashes by vehicle type and applying weighting factors or mass-adjusted formulations. In freight-heavy corridors or rural areas with high truck volumes, tailoring the model to reflect heavier fleet compositions could improve predictive accuracy. Research has shown that truck drivers under delivery pressure often engage in speeding and other risky driving behaviors that increase crash severity ( 29 ), and that tight delivery schedules can reduce compliance with speed and service regulations ( 30 ). To extend the KVI’s applicability, future iterations of the model could incorporate fleet composition data, vehicle mass distributions, and calibrate parameters by vehicle class, thereby improving the model’s ability to capture the differential risks associated with various vehicle pairings.
Motorcycle-involved crashes also warrant special consideration. Studies on on-demand food-delivery motorcyclists have documented how time-sensitive incentives lead to higher operational speeds and increased risky behavior ( 31 ), as well as unique movement patterns that influence crash dynamics ( 32 ). To address these disparities, future versions of the KVI should account for both the expected severity associated with different vehicle pairings and the relative likelihood of crash involvement across modes.
In addition, the rise of electric vehicles (EVs) introduces new challenges for severity modeling. EVs tend to be significantly heavier because of battery mass, which increases kinetic energy at a given speed and could elevate injury risk in collisions with lighter vehicles. At the same time, EVs often include advanced safety technologies that may reduce certain impact forces. While the current KVI does not distinguish between drivetrain types, its structure allows for adaptation as vehicle fleets evolve. Incorporating EV-specific parameters will be important to maintain model accuracy and relevance as electrification becomes more widespread.
The model also has implications for planning with vulnerable road users in mind. While the current formulation applies specifically to two-vehicle crashes at intersections, the same underlying principles could be adapted to model energy exposure in crashes involving pedestrians, cyclists, or micromobility users. These users are far more susceptible to injury because of their limited protection, and even moderate kinetic energy transfer can result in serious or fatal outcomes. Pairing the KVI framework with sidewalk or bike-lane exposure data could support proactive risk estimation for nonmotorized modes.
While the current version of the KVI was developed and validated for traditional intersections, the underlying methodology can be extended to other roadway contexts. Future applications could include curves, ramps, and particularly roundabouts, which alter vehicle trajectories and reduce conflict angles and speeds. Because roundabouts remove the most severe crash types, such as head-on and left-turn collisions, KVI could help quantify the expected reduction in injury severity when converting a signalized intersection to a roundabout. With appropriate adjustments for geometry and operating speeds, the model could also be adapted to assess safety risk on corridors with reversible lanes, high-speed arterials, or other complex configurations. These extensions would enhance the model’s utility as a general framework for evaluating roadway design alternatives based on injury potential, not just historical crash outcomes.
Conclusion
This research demonstrates that kinetic energy provides a rigorous and scalable foundation for estimating crash severity at intersections. By critically evaluating the FHWA’s SSI model, highlighting its tendency to overpredict severity, its omission of key crash types, and its lack of empirical grounding, this study establishes a clear need for a more accurate and usable alternative. The KVI responds to that need by combining physics-based reasoning with real-world crash data to produce a simplified, interpretable model calibrated at the crash level.
Using over 900,000 two-vehicle intersection crashes across two states, the study develops and validates the KVI through both calibration (Georgia) and external evaluation (Massachusetts). Unlike the SSI model, which relies on per-vehicle calculations and assumptions about driver behavior, the KVI operates at the crash level and uses categorical variables, collision type and PSL, making it more practical for widespread use. The KVI achieved a strong fit to observed FSI, confirming its generalizability across roadway contexts.
Most importantly, the KVI enables proactive safety screening, offering stable severity risk estimates even where no prior FSIs have occurred. This aligns directly with the Safe System Approach by allowing transportation professionals to prioritize high-risk locations before serious crashes happen. The model is easy to apply, grounded in physical principles, and compatible with standard crash data, positioning it as a scalable tool for network screening, design evaluation, and equity-based safety planning.
Future enhancements should incorporate vehicle mass, evolving fleet characteristics, and multimodal crash types, particularly involving vulnerable road users. In addition, integration with real-time data sources such as video detection could further refine severity estimates. Even so, in its current form, the KVI represents a practical and scientifically grounded step forward in making kinetic energy a usable metric for intersection safety analysis.
Footnotes
Acknowledgements
The authors of this study would like to express their gratitude to Ron Knezevich, and Mark Doctor for their commitment to roadway safety and the Safe System Approach.
Author Contributions
The authors confirm the contribution to the paper as follows: study conception and design: R. Cabe; data collection and cleaning: V. Abadia, R. Cabe; analysis and interpretation of results: R. Cabe, V. Abadia, J Tsai; draft manuscript preparation: R. Cabe, V. Abadia, J. Tsai. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author on reasonable request.