
Abstract
With the intensification of aging, smart elderly care increasingly plays an irreplaceable role in alleviating the pressure of elderly care. Providing meal delivery services for the elderly with the help of smart tools could help solve the dining problems of the elderly. Considering heterogeneity within the elderly population, this paper considers those who have meals at home and those who choose to eat at community service centers—the two dining locations encompassing different time windows. This study investigated the path optimization problem of the joint delivery of elderly meals by trucks and robots. At the same time, it considered the battery capacity of the robots and constructed a mixed-integer programming model to minimize the total cost of the system. For large-scale problems, an improved adaptive large neighborhood search algorithm was used, which integrated the ant colony algorithm to solve them. The investigation confirmed the feasibility and effectiveness of the algorithm. Based on the research results, this paper offers management and key stakeholders practical guidance for implementing elderly meal delivery.
Keywords
Introduction
With an aging population, society is facing huge pressure to provide for the elderly—the provision of timely, nutritious food representing a key requirement ( 1 , 2 ). Currently, the elderly who provide their own meals may be at risk of malnutrition and food insecurity ( 3 , 4 ). It has been proven that the elderly benefit significantly from meal delivery services. At the same time, market demand for elderly meals is huge, and such meal delivery services are facing severe challenges. Typical elderly meal deliveries are carried out by a combination of truck from the central kitchen to the delivery center, where the staff then collect the meals and transport them, on foot, to the elderly ( 5 ). However, this delivery process takes time, has several links, and involves excessive labor costs. In addition, the elderly as a group have special dietary requirements and preferences. Research has shown that providing personalized meals is conducive to improving the health status and happiness index of the elderly ( 6 ). In fact, many elderly people want to maintain their independence for as long as possible: they prefer to live in community service centers or at home ( 7 ). The elderly’s medication management, living habits, and so forth, will also affect their eating behaviors. Elderly people have different dining locations and their own timetables. Therefore, meal delivery services need to be flexible, given the certain degree of heterogeneity in the dining characteristics of the elderly (e.g., food requirements, dining locations, and dining times).
Smart elderly care aims to improve elderly care services through the adoption of technologies such as the Internet, the Internet of Things, and big data ( 8 ); one effective measure could be to combine intelligent delivery with elderly food delivery. Common intelligent delivery tools include robots and drones ( 9 , 10 ). In fact, in areas such as California, KiwiBot and Starship robots already provide food delivery services to customers ( 11 , 12 ). In a joint delivery system of trucks and robots, robots can visit areas where trucks are restricted, such as schools or residential areas ( 13 ). At the same time, the last kilometer delivery involving delivery robots can not only reduce costs, but also improve delivery efficiency ( 14 ). In addition, during the peak period of virus infection, delivery robots can reduce the contact between customers and drivers, thus reducing the risk of infection ( 15 ). Hong et al. studied the delivery of elderly meals, but did not consider the heterogeneous requirements of the elderly or the battery capacity of robots ( 16 ). Therefore, this study considers the delivery heterogeneity of elderly people, and studies the vehicle routing problem of joint delivery of elderly meals by trucks and robots. The meal delivery service targets two groups of elderly people: those who choose to receive eldercare in community service centers, and those who opt for home-based eldercare.
In summary, considering the heterogeneity of the elderly population, this paper studies the vehicle routing problem of joint delivery of elderly meals by trucks and robots within a time window. At present, the elderly meal delivery service has spatial differentiation characteristics. Elderly people with mobility difficulties tend to have meals at home, whereas some elderly people prefer to attend community service centers. Therefore, it is necessary to set up centralized community service centers with canteens to improve delivery efficiency. For such differentiated scenarios, an in-depth adaptation of the delivery method and delivery strategy is required. This study adopted the vehicle–machine collaboration approach by (a) utilizing the characteristics of trucks, such as their large capacity and endurance, to deliver to community service centers; (b) utilizing the flexibility and mobility of robots to provide meal delivery services for the elderly living at home; (c) addressing the issue of robot endurance, increasing the battery capacity constraint of the robots; (d) taking into account the community service center’s relatively fixed meal times, and the personalized time needs of the elderly living at home. To achieve this, double-layer time windows are introduced. This study constructs a path optimization model for the collaborative delivery of elderly meals by trucks and robots that is more in line with real-world scenarios. With the objective function of minimizing the total system cost, the model is solved by an improved adaptive large neighborhood search algorithm, integrating the ant colony algorithm. The innovation of this research mainly includes (1) incorporating elderly heterogeneity by introducing registered dietitians to customize meals based on individual health conditions and dietary preferences, thereby enhancing nutritional outcomes; (2) differentiating elderly customers into two categories—those dining at community service centers (with fixed time windows) and those at home (with personalized time windows)—to better align delivery with real-world demands; (3) integrating robot battery capacity constraints, allowing robots to recharge at the nearest community service center, which improves operational feasibility and efficiency; and (4) developing an improved adaptive large neighborhood search (IALNS) algorithm fused with ant colony optimization to yield higher-quality solutions for large-scale instances.
The proposed model and algorithm have substantial practical implications. Amid intensifying population aging, the approach minimizes total system costs through optimized routing and resource allocation while accounting for heterogeneity in elderly demands. This could enhance on-time delivery rates and operational efficiency, reduce delay penalties, and ultimately improve nutritional intake, health outcomes, and life satisfaction among the elderly. Moreover, employing robots for last-mile delivery could effectively alleviate labor shortages and the high costs associated with traditional meal services for the elderly, while enabling contactless operations that mitigate infection risk. The approach is particularly suitable for community-based meal delivery services—such as home-delivered meals programs (analogous to international “Meals on Wheels”)—and hybrid models integrating community service centers with in-home care.
The remainder of the paper is structured as follows. The second section reviews the relevant literature. The third section describes the problem and model construction. The IALNS algorithm is then introduced. The fifth section introduces the numerical experiments undertaken, and the final section summarizes the findings and discusses prospects for future research.
Literature Review
Elderly Diet and Heterogeneity
As the demand for eldercare services continues to grow, most elderly people — especially those with mobility difficulties who are unable to prepare their own meals — need meal delivery services ( 17 ). However, the characteristics, place, and time of eating are heterogeneous among the elderly. First, given the large differences in the physical conditions of the elderly, especially those with chronic diseases, elderly people have high nutritional requirements for meals, and interventions by registered dietitians have been introduced to develop personalized diet plans, thereby reducing the risk of related diseases ( 6 , 18 ). Data show that the nutritional status of elderly people who receive meals is significantly improved ( 19 ). Secondly, in considering dining places, food delivery services mainly target two types of elderly people: those who attend community service centers, and those who live at home ( 20 ). Finally, the elderly who choose to eat in the community service center have a relatively uniform dining time, because the community service center has a fixed working time. Whereas the dining time of the elderly who choose to eat at home is relatively flexible, mainly affected by their living habits. For example, some elderly people choose to eat within a limited time window to prevent cardiovascular diseases ( 21 ). The current meal delivery mode for the elderly is mainly outsourcing and volunteer delivery ( 22 ). The truck delivers the food to a parking point, and the staff and volunteers deliver the food to the customer on foot. The whole delivery process has two stages: the first stage is the truck delivery, and the second is the human-based delivery.
Research on Vehicle Routing Problem with Time Window and Algorithm Solution
The vehicle routing problem with time windows (VRPTWs) represents a classic extension of the vehicle routing problem (VRP), with decades of research history. This problem is typically classified into two variants based on time window constraints: hard time windows (which must be strictly satisfied) and soft time windows (in which violations incur penalty costs) ( 23 ). The mainstream methods for solving the VRPTWs are precise algorithms and heuristic algorithms ( 24 , 25 ). Since it is difficult to ensure the optimal solution within a limited time via the precise algorithm, the heuristic algorithm is suitable for complex large-scale problems ( 26 ). With the hard time window VRP, scholars usually embody the time window conditions in constraints. Lehmann and Winkenbach studied cargo pick-up and delivery in the last kilometer of two-stage vehicle routes ( 27 ). Considering vehicle mileage limitations and customer demand, a mixed-integer programming (MIP) model was established with total cost minimization as the objective function, and a model that was solved by an adaptive large neighborhood search (ALNS) algorithm. Researchers have studied urban express logistics, considered the impact of customer regional division and traffic conditions on delivery time, established a MIP model with the total cost minimization as the objective function, and solved the model through the meme algorithm ( 28 ). Zhou et al. studied the VRP of urban logistics, considered the mixed delivery of two-stage vehicles, established a mixed-integer linear programming model with minimizing transportation cost as the objective function, and solved the model through the ALNS algorithm ( 29 ). Zhou et al. also studied path scheduling in time-varying electric vehicles ( 30 ). Considering the energy consumption of electric vehicles, Zhou et al. established a mixed-integer linear programming model, minimizing transportation cost as the objective function, and solved the model through the variable neighborhood search (VNS) algorithm. For the soft time window VRP, scholars usually embody the time window condition in the objective function. Karakatic studied the VRP with capacity constraints in multiple vehicle parks by considering the charging mode of electric vehicles; minimizing the total time of all vehicles as the objective function; including travel-, waiting-, and penalty time; and establishing a mathematical model that was solved through a genetic algorithm (GA) ( 31 ). Heimfarth et al. studied the last kilometer problem of joint delivery of trucks and robots, considering the properties of items and customer preferences, minimizing the total cost (the objective function), including a transportation cost and time window penalty cost, establishing a mathematical model, and solving the routing problem through the general VNS algorithm ( 32 ). Shen et al. studied the problem of medical waste recycling. Taking uncertain demand and vehicle load limitations into consideration, the authors established a mathematical model to minimize the sum of site selection cost, transportation cost, time window penalty cost, and transportation risk cost under uncertain conditions, and solved the model using simulated annealing and an improved genetic algorithm, and solved the model through simulated annealing and improved GA ( 33 ). Wang et al. studied the VRP of warehouse reverse logistics; they took intelligent recovery price and transportation resource sharing into consideration, minimized operating cost, and maximized recovery profit as objective functions. They further established a MIP model, which was solved by hybrid adaptive GA and the particle swarm optimization algorithm ( 34 ). Zhang et al. studied the VRP of electric vehicles with time window, considered the priority of time window and hybrid charging strategy, took the minimum total cost as the objective function (including transportation cost, charging cost, and time window penalty cost), established a mathematical model, and solved the model through an IALNS algorithm, ( 35 ). Recent reviews, such as by Alam and Guo, have further summarized various extensions involving energy-constrained vehicles (e.g., electric freight vehicles) with time windows, including EVRPTW (i.e., electric VRPTW), EVRPFTW (with flexible time windows), EVRPTWsc (with satellite customers), MVRPTW (mixed fleet), and 2E-EVRP-TW (two-echelon electric VRPTW). These variants primarily focus on charging scheduling, energy consumption, and general freight logistics ( 36 ).
In contrast to these classical and extended studies, this paper investigates a VRPTW variant in a two-echelon truck–robot collaborative delivery scenario, which differs from the most similar variant in the review by Alam and Guo ( 36 )—the 2E-EVRP-TW—in several key aspects: the first echelon employs conventional trucks for bulk transfers, whereas the second echelon utilizes ground robots for last-mile delivery, rather than a pure electric truck fleet, as described in the review. The application is tailored to a smart elderly care meal supply chain (central kitchen–community service centers–homebound elderly), as opposed to general freight; has additional integration of elderly demand heterogeneity (e.g., personalized meal costs from registered dietitians, customer classification, and differentiated penalty coefficients), aspects not systematically incorporated in the reviewed variants; and robot battery capacity constraints that permit flexible recharging at the nearest community service center, extending beyond the fixed charging station models in the review. This specific variant has not yet been systematically explored, specifically in the context of elderly care applications. Consequently, the proposed model and solution approach offer targeted innovative contributions, including filling the gap in heterogeneity frameworks and enhancing health benefits and sustainability.
Model Comparison and Discussion
The VRP involving collaborative delivery by trucks and robots (or drones) has garnered considerable attention in recent years. Prominent models include the Flying Sidekick Traveling Salesman Problem (FSTSP) and Parallel Drone Scheduling Traveling Salesman Problem proposed by Chase and Chu ( 37 ); the multiple FSTSP introduced by Murray Raj ( 38 ); and the two-echelon VRP with drones developed by Kitjacharoenchai ( 39 ). These models are primarily designed for general last-mile delivery contexts, with objective functions focused on minimizing transportation costs or completion time. They are typically formulated as MIP problems and solved using metaheuristics such ALNS or branch-and-price algorithms.
Compared with these existing models, the MIP model proposed in this study exhibits notable distinctions and advantages in several key aspects. First, being tailored specifically to the smart elderly care context, the model systematically incorporates heterogeneity in elderly demands—including personalized meal preparation, differences in dining locations (community service centers versus home), and individualized time windows—into a two-echelon delivery framework. In contrast, prior models have often assumed homogeneous demands. By distinguishing between two types of elderly customer and introducing registered dietitian costs along with differentiated penalty coefficients, the proposed model more accurately captures real-world heterogeneity, thereby enhancing elderly health benefits and customer satisfaction. Second, the model explicitly accounts for robot battery capacity constraints, requiring the robots to return to the nearest community service center for recharging based on their remaining battery levels. This addresses a common limitation in traditional models that overlook battery constraints, potentially leading to infeasible routes. The inclusion of this constraint improves the model’s practical operability, particularly in relation to elderly meal delivery, by reducing the risk of service interruptions and optimizing robot utilization.
Problem Description and Model Construction
Problem Description
This paper presents the two-stage VRP of joint delivery of trucks and robots, in which food delivery is mainly targeted at two groups of elderly: those who choose to eat in community service centers and those who choose to eat at home. The food delivery process consists of two stages, as shown in Figure 1. First, trucks carrying meals for the elderly start from the central kitchen and arrive at the community service center on demand. Here, they distribute a certain number of meals to the elderly who choose to eat in the community service center; this is also where a certain number of robots can be stored. The truck driver then drops the food into the robot, which departs from the community service center to delivers the meals to seniors who choose to eat at home. After the completion of the food delivery, the robots can either return to the original community service center or go to a nearby community service center to recharge. The truck returns to the central kitchen after completing the delivery, without waiting for the robot to return to the community service center; this improves the utilization and flexibility of the truck to a certain extent. This paper considers the dining time of the elderly who choose to eat in the community service center to be relatively uniform. However, the elderly who choose to eat at home could have diverse living habits (although relatively fixed meal time) and drug management (e.g., those with chronic diseases may need to take medicine at specific times), therefore, the dining time window of the elderly who choose to eat at home may be very different (i.e., personalized time window). If the truck or robot delivers early or on time, there is no penalty cost, however, there is a penalty for late delivery. Considering the individual needs of the elderly, the study also introduced registered dietitians to devise appropriate meal plans for the elderly. This study has the following assumptions: (1) the geographical locations of the elderly in the central kitchen, community service centers, and those living at home are known, as is their demand (e.g., food requirements); (2) the number of meals made in the central kitchen meets the needs of all the elderly; (3) both the truck and the robot move at a constant speed; (4) both meal preparation and delivery services meet all the requirements raised by the elderly group, and each elderly person can only be served by trucks or robots; (5) the community service center can store sufficient robots to meet its distribution needs; (6) the construction cost of the community service center is fixed; (7) the fuel consumption cost of a truck is not related to the quantity of food it carries; (8) the power consumption cost of the robot has nothing to do with the quantity or weight of food it carries; and (9) the walking time of the elderly people who choose to have meals at community service centers is not considered. An example of a collaborative truck and robot delivery of elderly meals is illustrated in Figure 1. The relevant symbols and interpretations involved in constructing the study’s mathematical model are shown in Table 1.
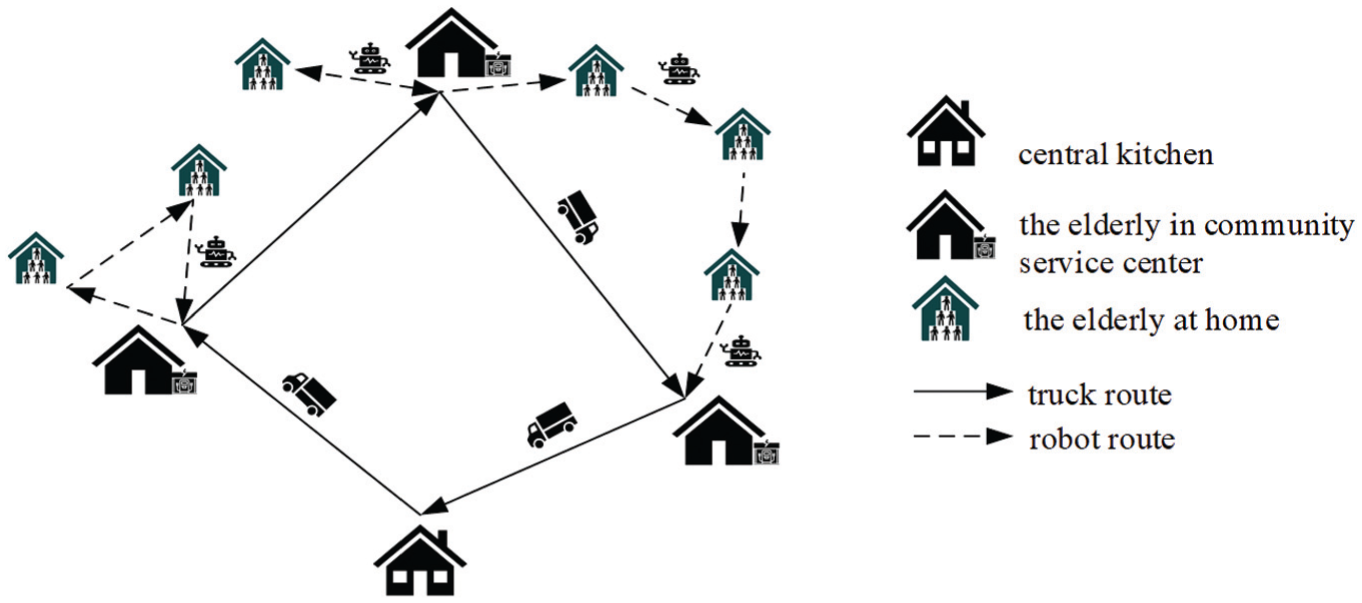
Example of a collaborative delivery of elderly meals by trucks and robots.
Notations
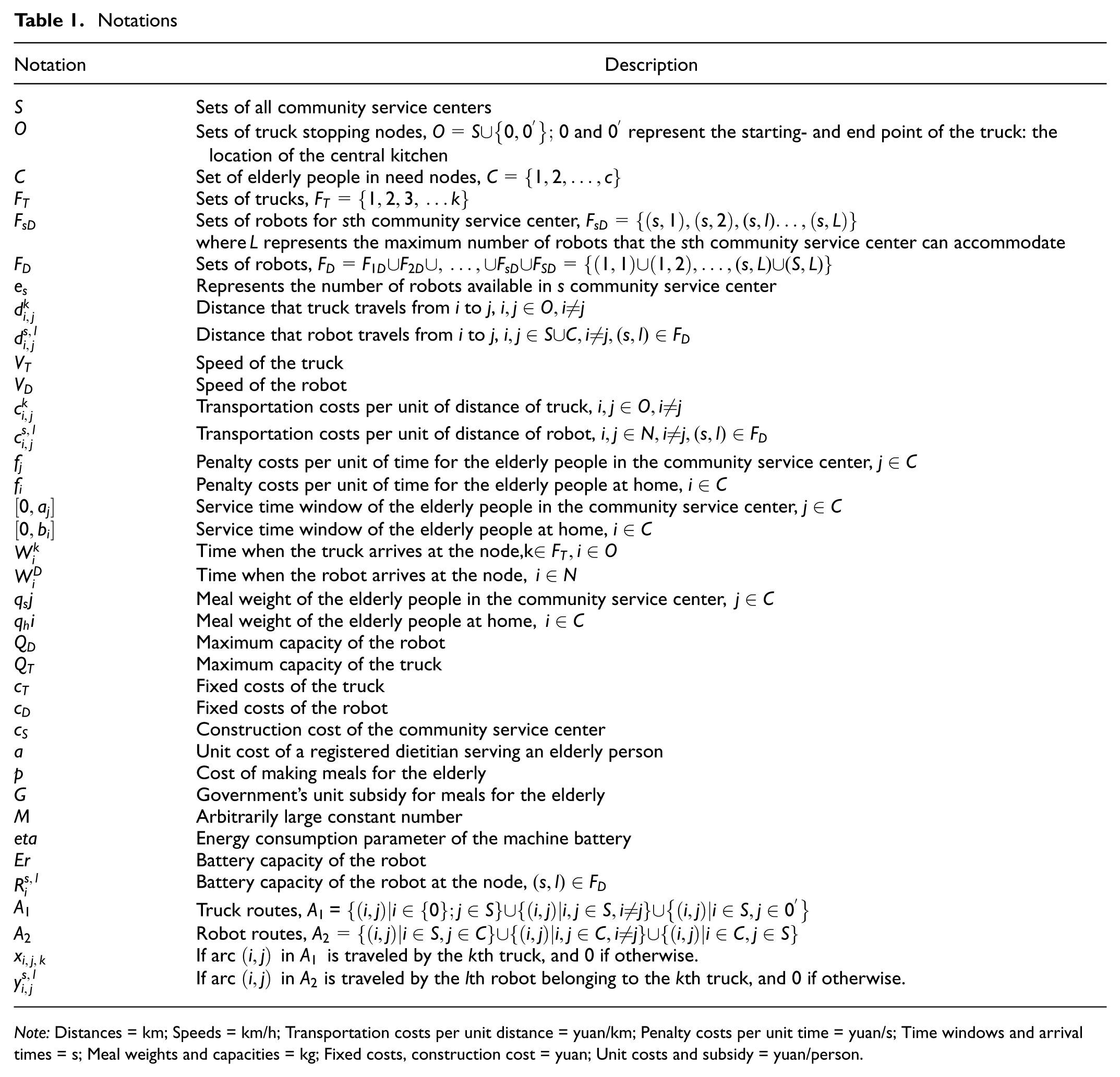
Note: Distances = km; Speeds = km/h; Transportation costs per unit distance = yuan/km; Penalty costs per unit time = yuan/s; Time windows and arrival times = s; Meal weights and capacities = kg; Fixed costs, construction cost = yuan; Unit costs and subsidy = yuan/person.
Model Construction
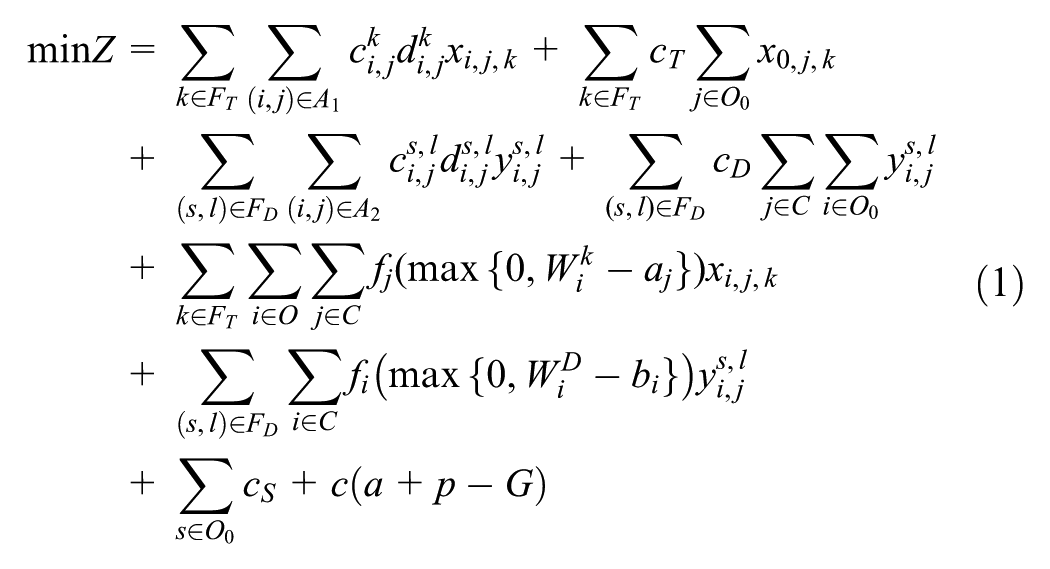
Objective Function
subject to











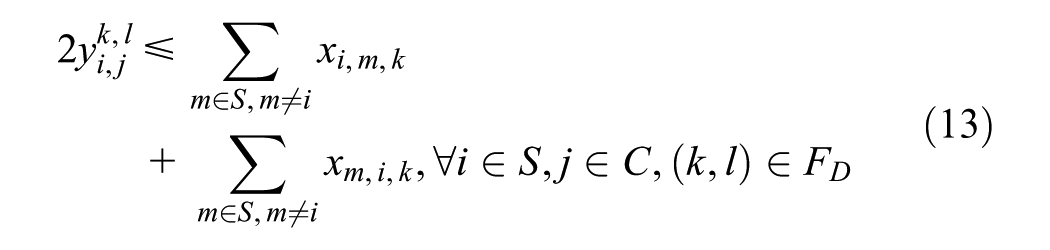





The objective function (Equation (1)) minimizes the total cost of the system, including the transportation cost and fixed cost of the trucks, the transportation cost and fixed cost of the robots, the penalty cost for the elderly caused by different time windows, the construction cost of the community service center, the registered dietitian cost, meal production cost, and government subsidies. Constraint 2 indicates that the number of times the truck arrives at or leaves the community service center will not exceed 1. Constraints 3 and 4 represent the truck flow balance. Constraint 5 indicates that each elderly person needs to be served and only once. Constraint 6 indicates the robot flow balance. Constraints 7 and 8 indicate that the robot leaves or arrives at the community service center at most once. Constraint 9 represents the capacity constraint of the robot. Constraint 10 indicates the capacity constraint of the truck. Constraint 11 indicates that the time of arrival of the truck to
Improved Adaptive Large Neighborhood Search Algorithm
The two-echelon VRP is an NP-hard problem (i.e., nondeterministic polynomial time) ( 40 ), and this paper further introduces heterogeneity of the elderly, time window penalty costs, and other factors, making the truck and robot joint delivery of meals for the elderly also NP-hard. Therefore, designing efficient metaheuristic algorithms was necessary.
Among numerous metaheuristic algorithms, we chose the ALNS as the core framework, mainly based on the following arguments: first, ALNS has been verified as an efficient framework in recent truck–robot joint delivery and two-echelon path optimization literature through dynamic adaptive selection of multiple destruction and repair operators, achieving a balance between deep destruction and efficient reconstruction in large-scale solution spaces, making them particularly suitable for variants with complex constraints such as time windows, battery capacity, and two-echelon synchronization (e.g., Lehmann and Winkenbach [ 27 ]; Zhou et al. [ 28 ]; Zhang et al. [ 35 ]). Second, compared with single neighborhood structure methods like GAs or VNS, ALNS’s diversified operator design is better suited to handling the multiple, complex constraints in this study, effectively avoiding premature convergence and maintaining population diversity.
However, the standard ALNS still has room for improvement in global guidance and convergence speed. Therefore, this study made the following innovations:
Generated the initial solution based on the ant colony algorithm: First, construct the initial pheromone matrix, and then directly select the path that satisfies the constraints through the roulette algorithm based on the information of the pheromone matrix, reducing the complexity of the initial solution construction algorithm.
Developed a collaborative update of a pheromone matrix and large neighborhood search: After the damage repair operator updates the initial path of the ant colony algorithm, the maximum-minimum ant system (MMAS) is adopted. The updated solution of the large neighborhood search is regarded as the optimal ant path, and the pheromone matrix is updated synchronously.
Designed operators in combination with the pheromone matrix of the ant colony algorithm: Add destruction and repair operators based on pheromone size, and dynamically combine the destruction and repair operators with the information matrix to achieve a local search under global information.
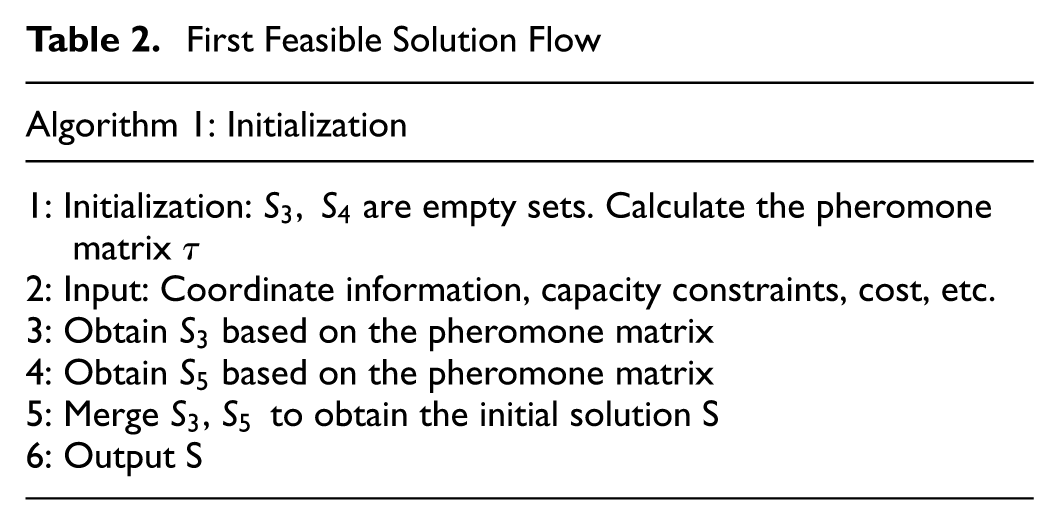
First Feasible Solution
This study proposes an initial solution construction method suitable for a two-stage collaborative distribution of trucks and robots. The initial solution is generated based on the pheromone matrix to simplify the initial solution construction process. Let
Step 1: With the robot capacity as a constraint and the transportation cost the goal, the elderly people in need are clustered to form different areas.
Step 2: After forming different areas, the community service center returned by the robot is selected with the truck capacity as the constraint and the transportation cost as the goal. Thus, the selected community service center set,
Step 3: After the robot path is formed, the selected community service center,
After the above steps, a collaborative truck–robot path satisfying the constraints can be constructed. and the pheromone matrix, τ0, of the initial path can be calculated. The first feasible solution flow is presented in Table 2.
First Feasible Solution Flow
Destroy Operator
The random destruction operator randomly destroys elements from the pheromone matrix. This operator can increase the diversity of solutions to avoid premature convergence of the ant colony algorithm in the search process.
The greedy destruction operator records all possible cases before executing the destruction task and chooses the pheromone matrix element that has the greatest impact on the total cost of the objective function system to destroy.
The path destruction operator triggers a pheromone matrix corresponding to a robot path to be randomly selected for destruction, which can improve the likelihood of reducing the number of trucks while ensuring the diversity of solutions (considering that the delivery cost of robots is much smaller than that of trucks). Since the number of community service centers is often much smaller than the number of elderly people, the random destruction effect of a truck’s path pheromone is very limited. For this reason, the current study only designed the robot path pheromone destruction operator.
Repair Operator
The randomness of the random repair operator is relatively strong. A pheromone node is randomly selected from the damage library and inserted into the path, satisfying constraints to ensure the search diversity of solutions and to reduce the probability of the algorithm falling into a local optimal solution.
Greedy repair selects the node pheromone that has the least impact on the total cost of the objective function system to repair, until all the elderly nodes are inserted or no elderly nodes can be inserted into the path that meet the constraints.
The path repair operator then repairs the robot path pheromone. If the path destruction operator is selected in the destruction stage, another robot path is selected for repair to ensure the effect of the path destruction operator. Otherwise, a path is selected at random to repair the fault.
Path Construction
According to the weighted sum of the damaged pheromones and the positions between the nodes, the ant’s next access node is determined. It is worth noting that the common roulette selection rules were not used in this study because the destruction and repair operators provide ants with the possibility of selecting different nodes in a more targeted way.
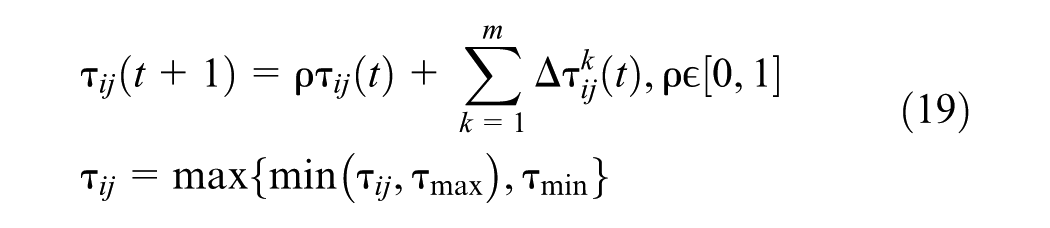
Pheromone Updates
In this study, the MMAS was adopted, which only allows the iterative optimal ant to update the pheromone to improve the orientation of the search (
41
). The pheromone update formula follows, where
Adaptive Mechanism
We adopted the method of selecting destroy–repair operators adaptively, as proposed by Ropke and Pisinger ( 42 ). The scoring formula is as follows:

where
r is reaction coefficient,
Score situations were divided into three cases: (1) the optimal solution so far; (2) better than the previous solution; and (3) not the optimal solution but is accepted by the simulated annealing acceptance criterion.
Update Judgment of Solution
Based on the new solutions obtained from the destruction operator, repair operator, and pheromone, the acceptance criteria of the solutions were generated by a simulated annealing algorithm. Moreover, the acceptance probability of the new solution was proposed,

where
T is current temperature value of simulated annealing, and T increases with iteration,
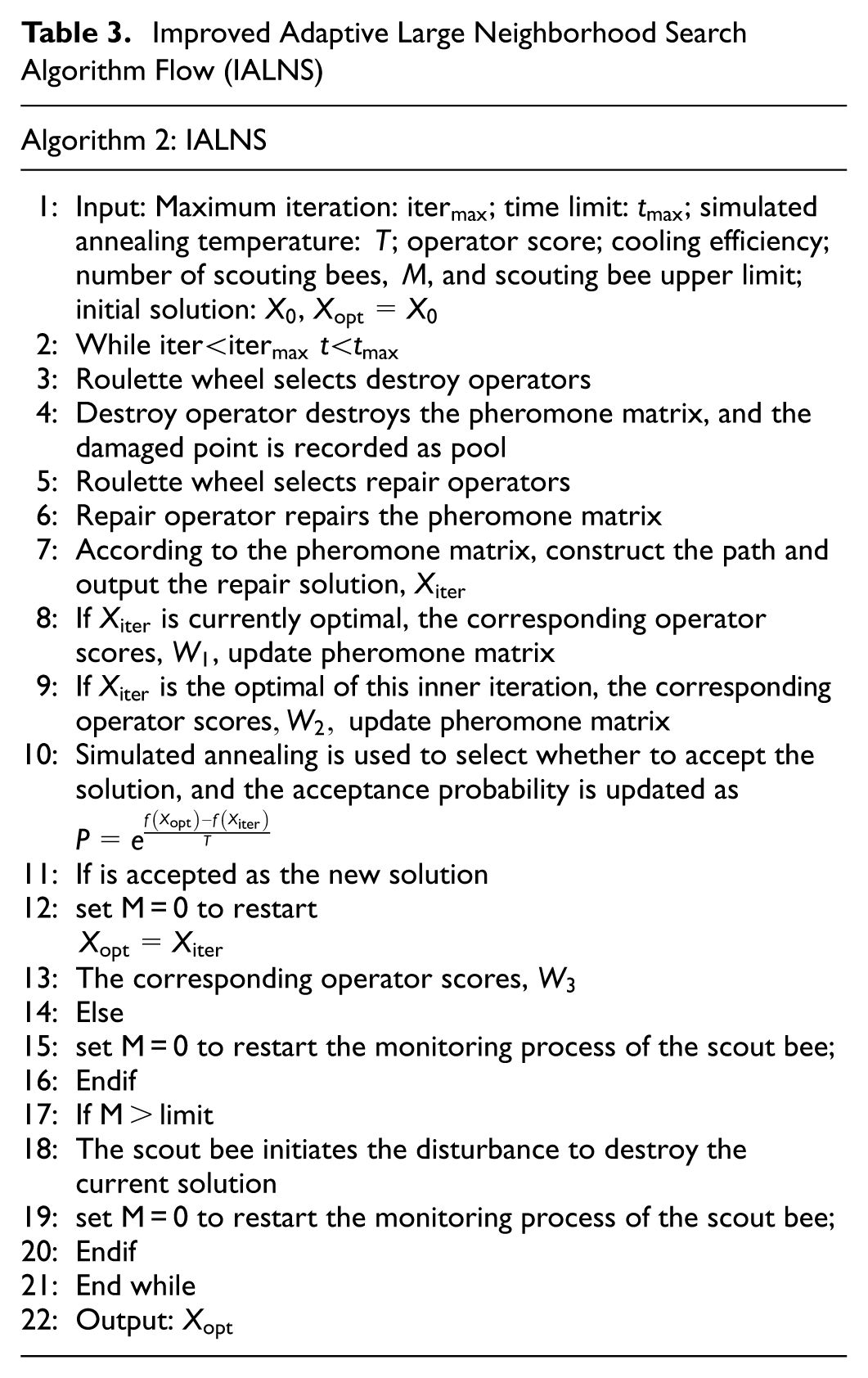
To further avoid falling into the local optimal solution, this study adopted the idea of scout bees in the artificial bee colony algorithm to monitor change in the solution. When the iteration exceeds a certain limit and the total cost of the system does not change, scout bees will abandon the solution of this iteration and add disturbance to obtain a new solution. Yu et al. suggested that three different operators should be added to carry out the perturbation, including changing the number of community service centers, changing the routes of robots, and for ensuring damage repair and reconstruction ( 45 ). The perturbation operator can greatly change the neighborhood of the solution, which is conducive to avoiding the local optimal solution. However, the calculation is relatively complicated and should not be added to every iteration. Therefore, the combination of scouting bees and perturbation operators could effectively reduce the computational complexity and improve the efficiency of the algorithm. The route plan of the elderly meal was obtained through the aforementioned steps. The IALNS algorithm flow is shown in Table 3.
Improved Adaptive Large Neighborhood Search Algorithm Flow (IALNS)
Computational Study
Data Description
This study selected CPLEX v.12.6.3.to solve the mathematical model and used MATLAB2022b programming to realize the algorithms, running on 12th Gen Intel(R) Core (TM) i7-1255U@ 1.70 GHz 16 GBRAM, Windows 11 operating system computers.
Dellaert et al. ( 46 ) detailed the method for generating examples, in which the coordinates of the elderly and community service center are randomly generated in a circular area with a radius of 10 km ( 47 ). Moreover, the location of the central kitchen represents the origin of the coordinates. Considering the practicality of delivering meals for the elderly in community service centers and the elderly at home, this study set the number of elderly people in need within a relatively reasonable range (up to 100 users). The construction cost of each community service center was 200 yuan, and the number of robots available for each community service center was four. It was assumed that the battery capacity of the robot was 100 and the energy consumption parameter of the robot battery was 0.1 It was assumed that the maximum load of the truck was 100 kg and the maximum load of the robot was 50 kg. Different types of trucks and robots have different speeds. The simulation values here assumed that the speed of the truck did not exceed 20 km/h and the speed of the robot did not exceed 10 km/h. Following Yu’s research, the unit distance cost of the truck was set at 3 yuan/km, and the unit distance cost of the robot was 0.3 yuan/km ( 13 ). The fixed cost of a robot was set to 5 yuan and the fixed cost of the truck was 50 yuan For the elderly who chose to eat in community service centers and those who ate at home, their time window was 0 to 10,000 s, and the penalty cost per unit time was set at 1 for the delivery time of meals. Assuming that the number of elderly people eating at each community service center was 10, the penalty coefficient of a late food delivery for the elderly people eating at the community service center was 0.7, and that of the elderly people eating at home was 0.3. Taking into account the difference in economic stage between regions, this study assumed that the difference between the production cost of meals for the elderly and the cost of registered dietitians and the government subsidy was 5.
Validity Testing
In Tables 4 and 5, “Obj” indicates total cost of the system (unit: yuan). For example, 40-8 indicates that the number of elderly people who chose to eat at community centers was 40, and the number of elderly people who chose to eat at home was 8.
Comparison of Results of Small-Scale Instances
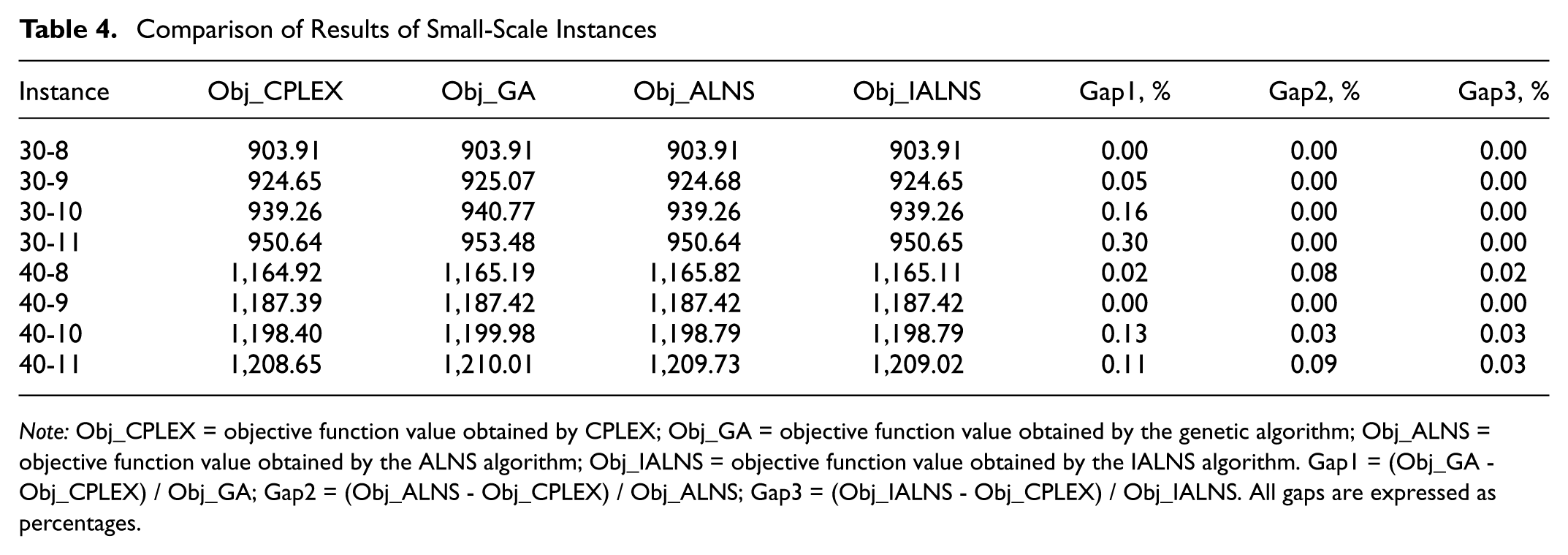
Note: Obj_CPLEX = objective function value obtained by CPLEX; Obj_GA = objective function value obtained by the genetic algorithm; Obj_ALNS = objective function value obtained by the ALNS algorithm; Obj_IALNS = objective function value obtained by the IALNS algorithm. Gap1 = (Obj_GA - Obj_CPLEX) / Obj_GA; Gap2 = (Obj_ALNS - Obj_CPLEX) / Obj_ALNS; Gap3 = (Obj_IALNS - Obj_CPLEX) / Obj_IALNS. All gaps are expressed as percentages.
Comparison of Results of Large-Scale Instances
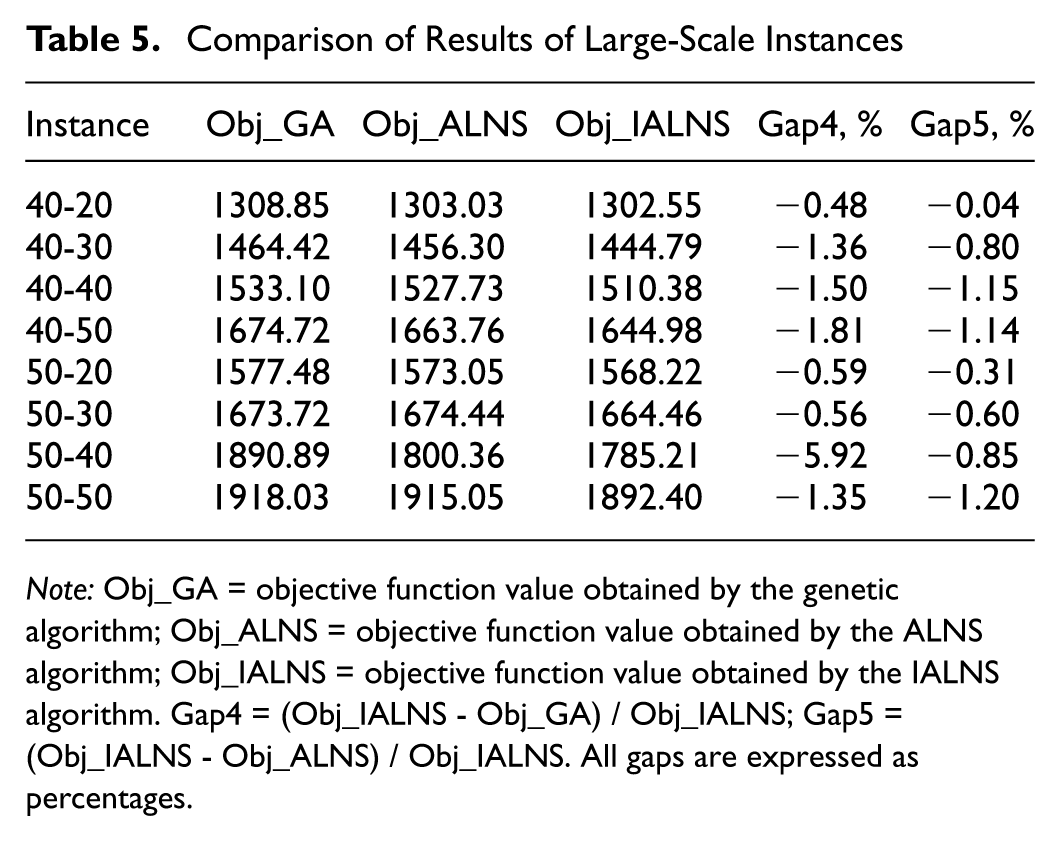
Note: Obj_GA = objective function value obtained by the genetic algorithm; Obj_ALNS = objective function value obtained by the ALNS algorithm; Obj_IALNS = objective function value obtained by the IALNS algorithm. Gap4 = (Obj_IALNS - Obj_GA) / Obj_IALNS; Gap5 = (Obj_IALNS - Obj_ALNS) / Obj_IALNS. All gaps are expressed as percentages.
Aiming at small-scale examples, eight groups of numerical experiments were carried out. CPLEX, GA, ALNS algorithm, and the IALNS algorithm were used to compute the same data. As can be seen from Table 4, the results of GA, ALNS, and IALNS were close to the exact solution of CPLEX, with a difference of 0% to 0.3%. At the same time, the error between the IALNS solution and the CPLEX exact solution was within 0.03%, the error between the ALNS solution and the CPLEX exact solution was within 0.09%, and the error between the GA solution and the CPLEX exact solution was within 0.3%. It can be seen that the performance of IALNS was slightly better than that of ALNS and GA in the small-scale examples, which confirmed the effectiveness of the IALNS algorithm.
For large-scale calculation examples, the running time of CPLEX was too long and the effect was inadequate. When the number of elderly people who chose to eat in the community service center was 30 and the number of elderly people who ate at home was 12, the running time was more than 3,600 s and there was no running result. Therefore, when the number of elderly people in need exceeded 60, this paper assumed a large-scale calculation example; the experimental results are shown in Table 5. To further evaluate the performance of the IALNS in large-scale examples, eight sets of numerical experiments were constructed. The algorithm comparison results show the difference in performance of GA, ALNS, and IALNS. In this study, an improvement was made on the basis of ALNS, and the values of Gap4 and Gap5 were both less than zero, thus confirming the effectiveness of the IALNS for ALNS optimization and the IALNS for GA optimization. It can be seen from Table 5 that the IALNS obtained higher-quality solutions and optimized the total cost of the system. In short, the IALNS developed in this study had obvious advantages in solving the solution, and was found to be suitable for solving the large-scale elderly meal delivery problem.
Sensitivity Analysis
Sensitivity Analysis of Robot Speed
Robot speed is very important to the overall efficiency of delivery. In this study, the robot speed was assumed to be 0.4, 0.7, 1.1, and 1.4 km/h respectively. The influence of robot speed on the total system cost was explored when other conditions remained unchanged. By observing examples 30-10 and 40-30 (Figure 2), an increase in robot speed was found to decrease the total system cost at first, which then gradually evened out. This indicated that when the robot speed increased, delivery efficiency increased, the resulting penalty cost of the elderly time window decreased, and the total system cost also decreased. When the robot speed increased only slightly, the time windows for the elderly were already largely satisfied and the penalty costs had become negligible; as a result, further speed increases had little impact on the total system cost, which leveled off. To optimize the total cost of the system, the speed of the robot should be appropriately increased, thus improving delivery efficiency, but it should be set within a feasible range.
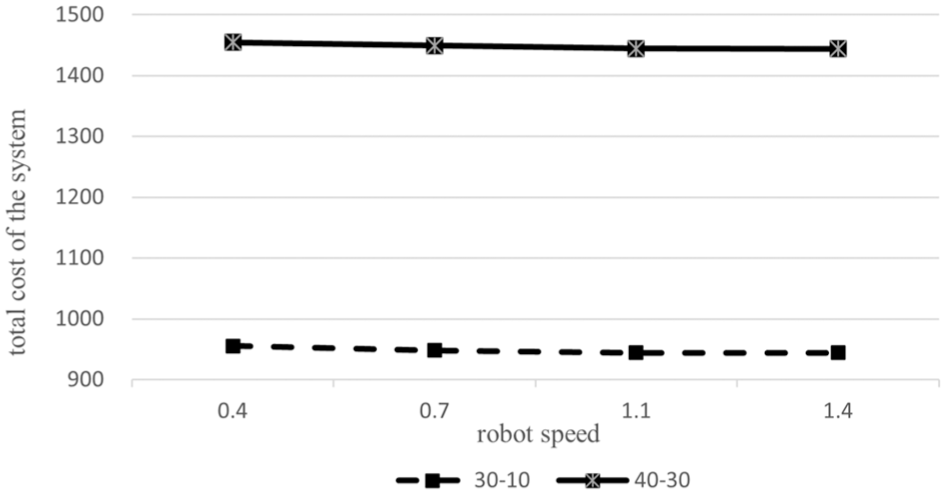
Sensitivity analysis of robot speed.
Sensitivity Analysis of Robot Battery Capacity
The battery capacity will affect the distance traveled by the robot, which in turn will affect the total system cost. This study assumed battery capacities of the robot of 70, 80, 90, and 100, respectively, and explored the impact of battery capacity on the cost when other conditions remain unchanged. By observing examples 40-30 and 30-10 in Figure 3, it was found that with the increase of robot battery capacity, the total system cost continued to decrease, especially for large-scale examples. When the battery capacity of the robot was larger, the distance the robot could travel will increased, and the number of customers it could serve also increased, thus reducing the number of robots required, and ultimately reducing the total cost of the system. To optimize the total cost of the system, robots with a larger battery capacity could be selected, but the battery selected should balance capacity with avoiding wasting resources.
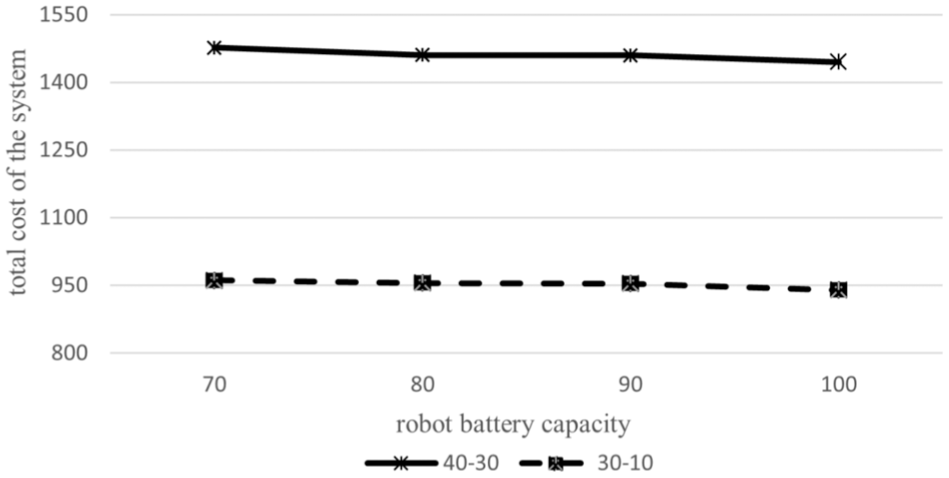
Sensitivity analysis of robot battery capacity.
Conclusion and Future Work
The two-echelon truck–robot joint delivery model and the IALNS algorithm developed in this study have significant practical implications and clear application areas. First, in the context of increasing population aging, the model achieved minimization of the total system cost (including transportation, fixed, penalty, nutritionist, and production costs) by systematically integrating the heterogeneity of elderly demands (personalized meal preparation, differences in dining locations, and individualized time windows), robot battery capacity constraints, and two-echelon delivery synchronization mechanisms. Numerical experiments showed that this scheme could significantly improve delivery efficiency and on-time rates, reduce delay penalties, and thereby enhance the elderly’s nutritional intake, health status, and overall life satisfaction. Second, the robot-dominated last-mile delivery effectively alleviated the labor shortages, high labor costs, and low efficiency issues in traditional elderly meal delivery modes (by reducing walking segments and multilevel transfers), and supported contactless services, lowering the risk of infection (such as during pandemics).
In summary, in the context of smart elderly care, this paper considers the time windows and dining location heterogeneity of the elderly, studies the two-echelon VRP for truck–robot joint delivery of elderly meals, and enriches the research content of intelligent delivery. To solve this problem, an IALNS algorithm fused with ant colony mechanisms was designed, achieving significant improvements in optimal solution quality, and the rationality and effectiveness of the model and algorithm were verified through numerical experiments.
Although the proposed model and algorithm performed excellently at the theoretical and numerical levels, there are still several limitations that deserve objective acknowledgment. First, the model assumes that cost parameters such as truck fuel consumption and robot power consumption are linearly related to distance/load, whereas in reality, robot battery consumption often exhibits nonlinear characteristics (e.g., growing quadratically with speed or accelerating decay under high loads), which may lead to deviations in cost estimates. Second, the model is a deterministic MIP framework that does not incorporate stochastic factors (such as traffic congestion, sudden weather changes, or real-time fluctuations in elderly demands), and these uncertainties may significantly affect travel times, time window satisfaction rates, and penalty costs, thereby amplifying actual operational risks. In addition, other potential limitations include not considering multiperiod dynamic path adjustments (optimizing daily demands independently), ignoring robot failure/maintenance costs, and bottlenecks in storage and charging capacities at community service centers during peak periods. Although these simplifications contribute to the model’s solvability and focus on the core of elderly heterogeneity, they also limit its direct applicability in highly dynamic environments.
In future research, the model could be further extended to incorporate more real-world dynamic factors, such as using Internet of Things and blockchain technologies to achieve real-time traceability of elderly meals, dynamic demand responses, and path replanning; at the same time, a multiobjective optimization framework could be constructed to simultaneously consider delivery time, customer satisfaction, environmental impact, and fairness; and more efficient hybrid metaheuristic algorithms could be developed to handle ultra-large-scale instances. These directions will further enhance the applicability and influence of the model in smart elderly care logistics practices.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: W. Hong, X. Pu; data collection: W. Yin, C. Qi; analysis and interpretation of results: W. Yin, C. Qi, S. Xu; draft manuscript preparation: W. Hong, X. Pu, C. Qi. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant no. 72271109).