
Abstract
The increasing presence of connected and automated vehicles (CAVs) with vehicle-to-vehicle communication capabilities presents substantial opportunities to enhance traffic flow efficiency and safety. When CAVs operate within mixed platoons alongside human-driven vehicles (HDVs), time-varying communication delays, incomplete car following dynamics modeling, and unpredictable human driving behaviors can destabilize traffic flow and diminish automation benefits. This paper proposes a dynamic weights leading cruise control (DWLCC) framework that adaptively balances delayed and real-time information by dynamically adjusting feedback weights based on communication conditions. The controller is theoretically analyzed using HDV dynamics and validated through simulations with full nonlinear car-following models. A comprehensive stability analysis framework examines the combined influence of time-varying delays, communication range constraints, and control parameters. Using Lyapunov-Krasovskii methods and head-to-tail string stability analysis, explicit stability boundaries are analytically derived, providing practical guidelines for robust controller design. Extensive numerical simulations validate the proposed approach under diverse operating conditions. Compared with conventional fixed-weight methods, DWLCC demonstrates superior velocity tracking and spacing regulation, enhanced safety margins, and reduced fuel consumption. These results highlight the potential of adaptive, delay-aware control strategies for safe and efficient CAV deployment in heterogeneous traffic environments.
Keywords
Introduction
The rapid advancement of connected and automated vehicles (CAVs) equipped with vehicle-to-vehicle (V2V) and vehicle-to-infrastructure communication capabilities represents a transformative paradigm shift in modern transportation systems ( 1 , 2 ). These technologies enable real-time data exchange and cooperative decision-making, offering unprecedented opportunities to enhance traffic efficiency, reduce fuel consumption, and improve safety through coordinated vehicle movements ( 3 , 4 ). Among the most promising applications, vehicle platooning has emerged as a cornerstone technology that leverages inter-vehicle communication to maintain optimal spacing, synchronize velocities, and maximize road capacity utilization ( 5 ). However, the transition to fully automated transportation systems faces technical, regulatory, and social challenges that preclude immediate widespread deployment ( 6 ). Consequently, mixed traffic environments, where CAVs coexist with human-driven vehicles (HDVs), represent the prevailing reality for the foreseeable future ( 7 ). This mixed traffic composition introduces unique complexities that necessitate sophisticated control strategies capable of accommodating the unpredictable nature of human driving behavior while maximizing the benefits of vehicle automation and connectivity (8–11).
One of the most critical challenges in connected vehicle platooning is the presence of time-varying communication delays ( 12 ). These delays arise from multiple sources, including wireless channel variations, network congestion, computational latency, and protocol overhead ( 13 ). Unlike fixed delays that can be compensated through predictive control strategies, time-varying delays introduce uncertainty that can compromise platoon stability and safety ( 14 ). The impact becomes particularly pronounced in mixed platoons where the propagation of delayed information can trigger cascading instabilities throughout the platoon formation ( 15 ).
From the perspective of communication delay, several approaches have been considered. Multi-anticipative information flow topologies have been developed to enhance robustness against moderate delays ( 16 ). Cooperative adaptive cruise control systems employing feedforward-feedback architectures have demonstrated effectiveness in disturbance attenuation ( 17 ). Advanced prediction algorithms, such as least mean square filters, have been proposed to anticipate delay variations and adjust control parameters accordingly ( 18 ). However, these approaches typically assume small, predictable, or slowly varying delays, limiting their applicability in realistic vehicular networks where delays can fluctuate rapidly and unpredictably (19–21). The challenge becomes more complex when considering the heterogeneous nature of mixed platoons ( 22 , 23 ). Communication delays not only affect the direct control inputs but also influence the coordination between CAVs and the prediction of HDV behaviors ( 24 ). This temporal mismatch can lead to suboptimal control decisions and potentially dangerous situations, particularly during emergency maneuvers or in dense traffic conditions.
The control of mixed platoons presents unique challenges that extend beyond fully autonomous platoon control. Several innovative approaches have emerged to address these complexities. Consensus-based control methods have been developed to achieve velocity synchronization and maintain spacing stability while ensuring overall platoon coherence ( 25 ). Event-triggered control algorithms have shown promise in managing systems with mixed time-varying delays, successfully maintaining both asymptotic and string stability ( 26 ). Observer-based robust control frameworks have been proposed to simultaneously handle nonlinear car following dynamics, communication delays, and dynamic topology changes ( 27 ). Reinforcement learning and adaptive control strategies represent promising future directions for handling uncertain human driving patterns, although analytical stability guarantees remain challenging ( 28 ). These methods can potentially capture the heterogeneity in driving behaviors and adjust control policies accordingly. However, most existing approaches focus on single aspect optimization, such as either safety or efficiency, without comprehensively considering the intricate interactions between multiple system factors.
Despite advances in connected vehicle control, several critical limitations persist in existing research. First, most studies adopt simplified communication models that fail to capture the complex dynamics of real-world vehicular networks, including packet losses, variable delays, and topology changes ( 29 ). The assumption of ideal or predictable communication conditions limits the practical applicability of these control strategies. Second, current approaches often employ oversimplified human driver models that inadequately represent the diversity and uncertainty inherent in human driving behavior ( 30 ). The heterogeneity among human drivers, including variations in reaction times, risk tolerance, and decision-making patterns, is frequently overlooked, leading to control strategies that may not perform well in realistic mixed traffic scenarios. Third, there exists a fundamental gap in understanding the combined effects of multiple factors affecting mixed platoon performance. Most studies examine individual aspects such as communication delays, CAV penetration rates, or string stability in isolation, missing crucial interactions between these factors ( 31 ). The influence of communication range limitations, varying delay characteristics, and dynamic topology changes on overall system performance remains insufficiently explored. Finally, existing stability analysis frameworks often lack the theoretical rigor needed to provide definitive stability guarantees under realistic operating conditions. The complex interplay between time-varying delays, nonlinear vehicle dynamics, and human behavioral uncertainties requires more sophisticated analytical tools that can capture these interactions comprehensively ( 32 ).
This paper proposes a dynamic weights leading cruise control (DWLCC) strategy and a stability analysis framework to tackle three major gaps in existing studies on mixed platoons: unpredictable communication delays, partial consideration of following vehicle dynamics, and unmodeled human driving behaviors. Our work also investigates how varying delay, communication range, and CAV penetration rates affect overall platoon performance. The contributions are:
A dynamic weight adjustment mechanism is developed. It adaptively balances information from multiple sources based on real-time communication quality metrics. Unlike existing fixed topology approaches, DWLCC continuously adapts its control weights considering both preceding and following vehicles, communication delays, signal strength, and packet loss rates. This adaptive mechanism enables superior performance under volatile network conditions while maintaining robustness against communication disruptions.
A unified state-space model is established based on HDV dynamics and time-varying communication delays. The model enables stability analysis while simulation validation employs full nonlinear car-following models to verify real-world applicability.
A comprehensive theoretical framework is developed. It provides definitive stability conditions for mixed platoons under time-varying delays. Through Lyapunov-Krasovskii functional analysis and head-to-tail string stability evaluation, the explicit relationships between allowable delay bounds, communication range limitations, controller parameters, and CAV penetration rates are derived. The analysis reveals critical stability boundaries and provides practical design guidelines for robust deployment.
The remainder of this paper is organized as follows. The next section presents the comprehensive modeling framework for mixed platoons with time-varying communication delays. The section after that details the DWLCC control strategy design and provides rigorous stability analysis including both asymptotic and string stability conditions. This is followed by a section presenting extensive numerical experiments validating the proposed approach and comparing its performance against existing methods under various operating conditions. The final section concludes the paper and discusses future research directions.
Model of the Dynamic Communication Mixed Platoon
This section outlines the modeling approach used to study the longitudinal control of CAVs in mixed platoons. The model captures the time-varying delays in information received by CAVs, effectively representing the interactions within the platoon and setting a foundation for analyzing the system’s overall performance under varying conditions.
The model considers a mixed platoon consisting of both CAV and HDVs arranged on a single-lane roadway, as shown in Figure 1. The CAV is designated as vehicle 0. Let
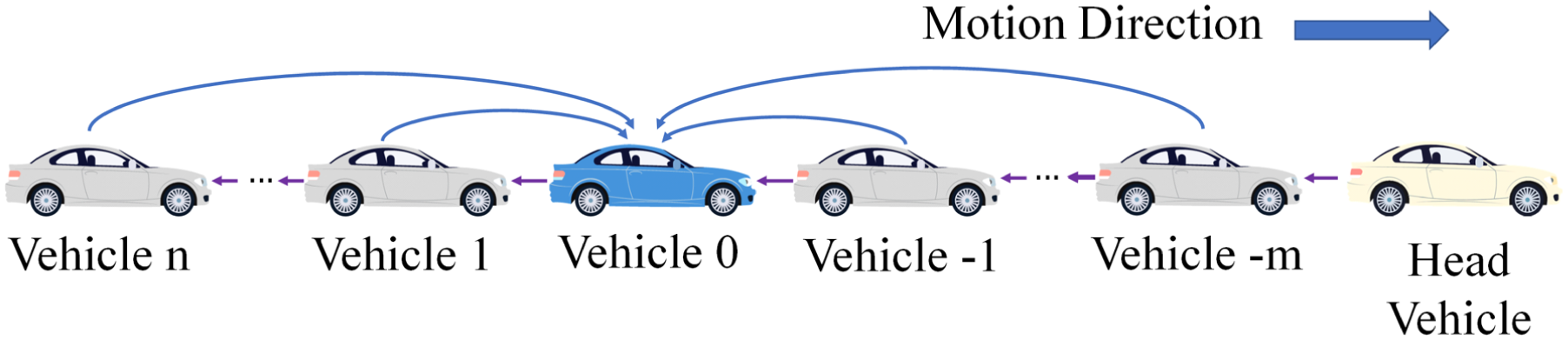
Mixed platoon communication typology.
Nonlinear Dynamics of Individual Vehicles
The interaction between vehicles, specifically HDVs, is governed by nonlinear dynamics ( 33 ). These dynamics are characterized using models such as the optimal velocity model (OVM) and the intelligent driver model, which relate a vehicle’s acceleration to its spacing and relative velocity ( 34 , 35 ).
For each HDV

where
One prevailing HDV model is the nonlinear OVM model, where the explicit expression of Equation 1 is ( 36 ):

where

where
A typical form of

For the CAV, indexed as 0, its acceleration is controlled by the input signal

It is important to note that the acceleration signal of the CAV also serves as the external control input for the entire mixed platoon system.
Dynamics of Mixed Platoon System
In a traffic equilibrium state, vehicles maintain a constant velocity

where
To analyze system stability around this equilibrium, we define the error states for vehicle

where
Applying first-order Taylor expansion to Equation 1 yields a second-order HDV model:
where
For realistic driving behavior,

where
The CAV is assumed to have the same equilibrium spacing as the HDVs at the equilibrium velocity. Under these conditions, the longitudinal dynamics of the CAV, approximating equilibrium conditions, can be represented by the following second-order differential equation:

The dynamics model of the mixed platoon system around the designated equilibrium state

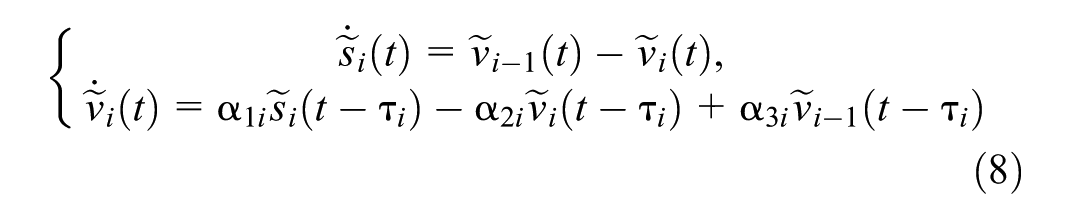
By utilizing the car-following model for HDVs described in Equation 8 and the dynamics specified for CAVs in Equation 11, we can establish the state-space model for the mixed platoon system. The model is presented as:

This integration enables the construction of the state-space model for the mixed platoon system, which is outlined as:

The coefficient matrices are
Note that
Controller Design and Stability Analysis of Mixed Platoon
This section presents the DWLCC framework and its stability analysis. We first introduce the key variables used throughout:
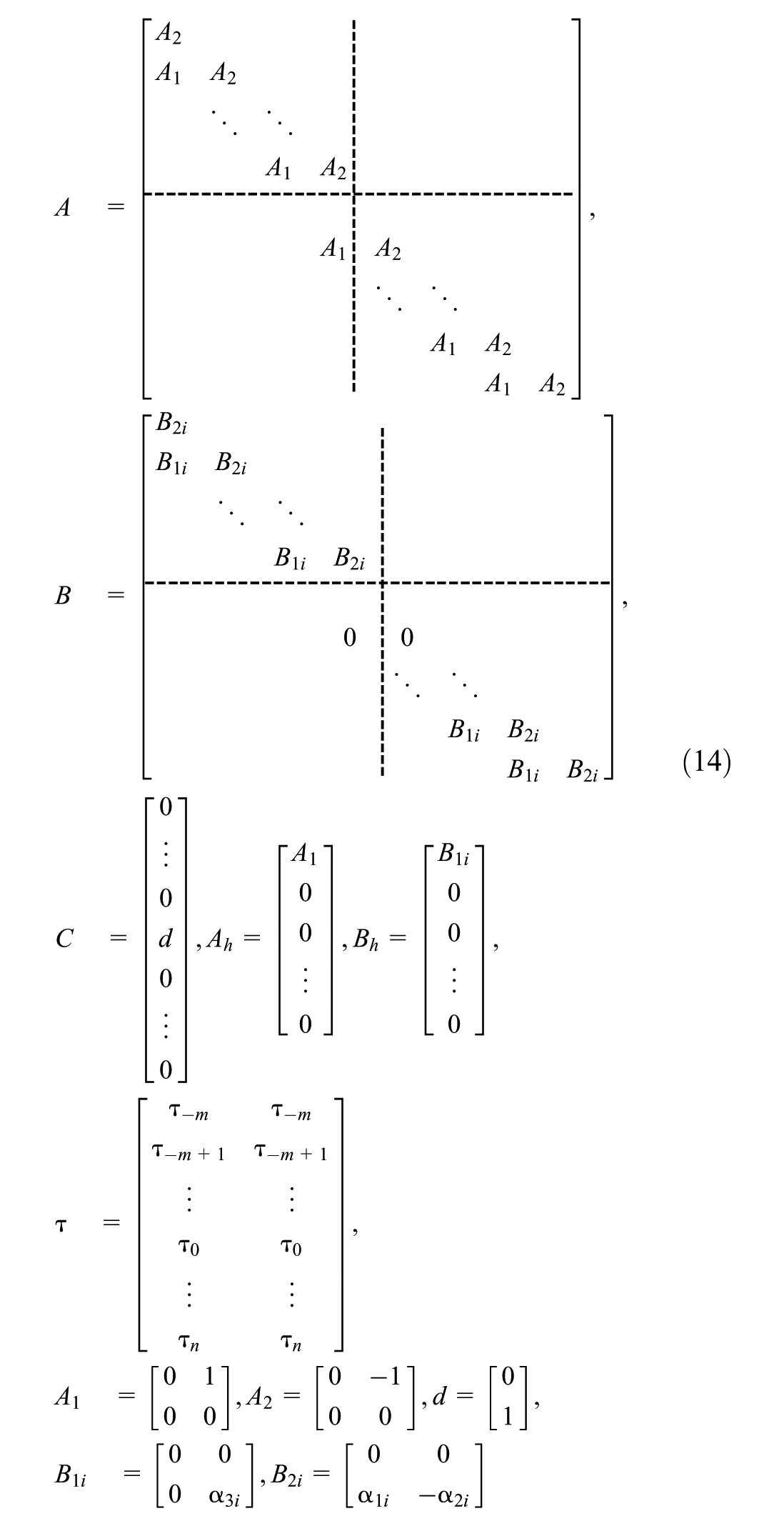
Figure 2 illustrates the framework of the DWLCC under communication constraints. It shows the interaction between the CAV and surrounding HDVs, factoring in detector time delay (
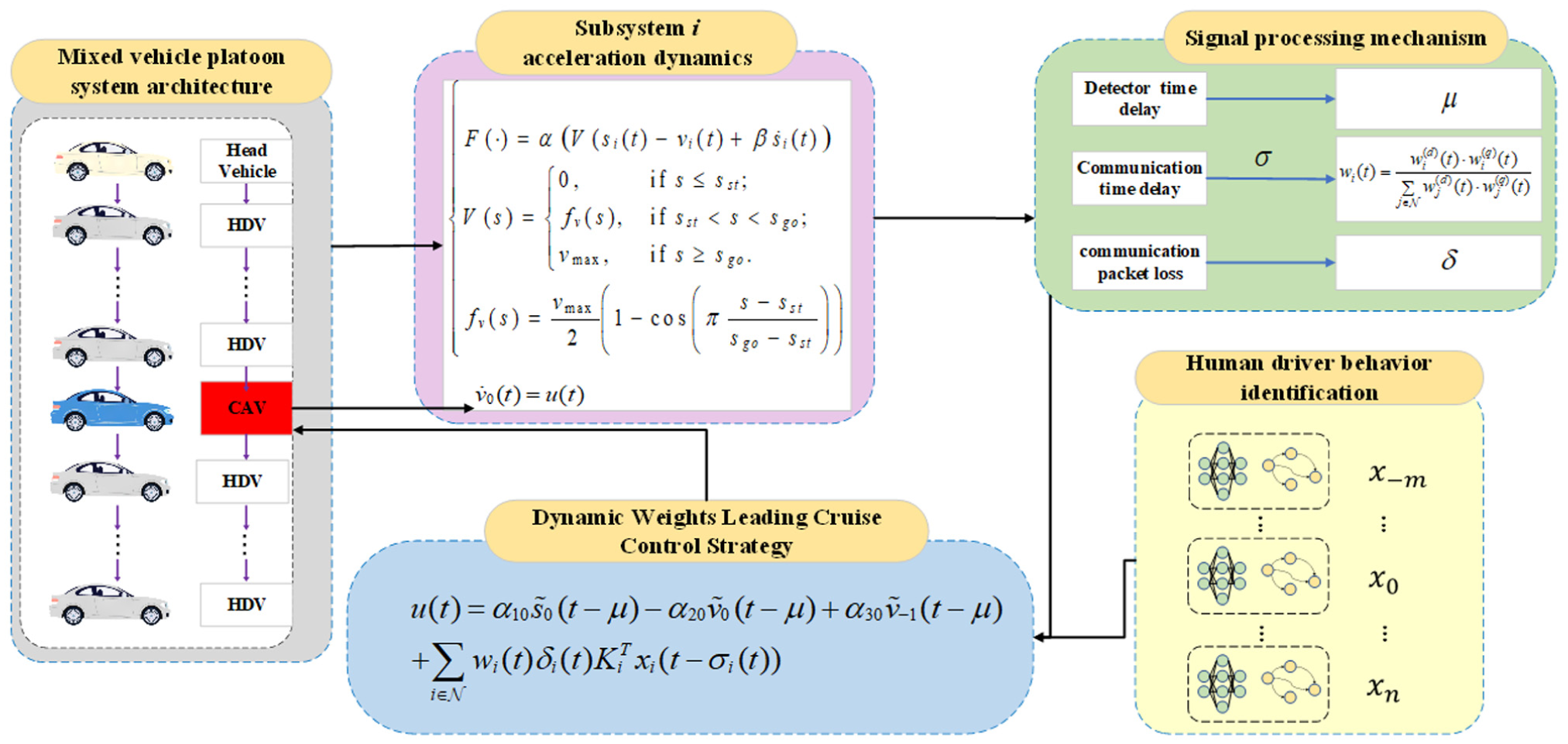
Framework of the dynamic weights leading cruise control scheme under communication constraints.
Controller Design Based on Dynamic Communication Topology
The DWLCC framework adapts to changes in communication topology caused by communication disruptions and delays. The control input is formulated as:

where
The baseline controller incorporates information from both preceding and following vehicles:

We implement delay compensation strategies:

where
The dynamic weights prioritize information with shorter delays:

where
Incorporate communication quality metrics as follows:

where
The weights
The final weights combine communication delay and quality considerations:

This ensures proper normalization while maintaining the priority order based on both delay and communication quality.
Asymptotic Stability Analysis
Lyapunov theory provides a standard tool to assess whether the closed-loop platoon remains stable under small perturbations.
Consider
If there exists
then
If
For any

Let
Then:

For

Substituting the DWLCC control law into the mixed-platoon model yields:

where
The matrices satisfy

for all

where

with blocks:
Given
Based on Lyapunov stability theory, we construct the Lyapunov-Krasovskii functional:

where
Taking the time derivative along system trajectories yields:
Substituting the system dynamics and applying the Newton-Leibniz formula
Expanding the terms yields:
Applying Lemma 0.2:
Applying Wirtinger inequality:
We have Lyapnov-Krasovskii stability criterion as:

where
For asymptotic stability, we require
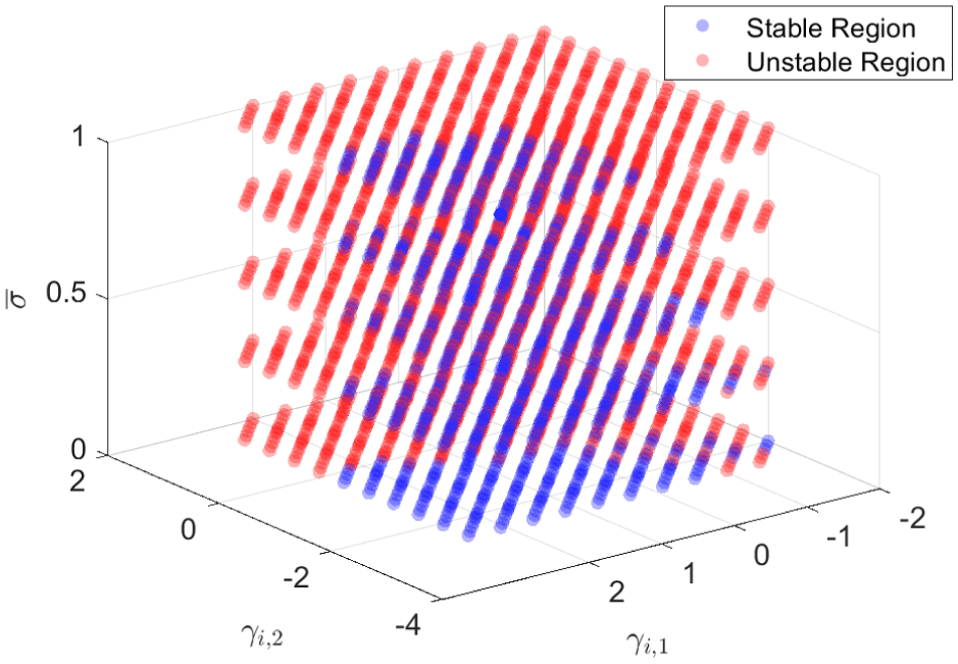
Figure 3 illustrates the stability regions in the
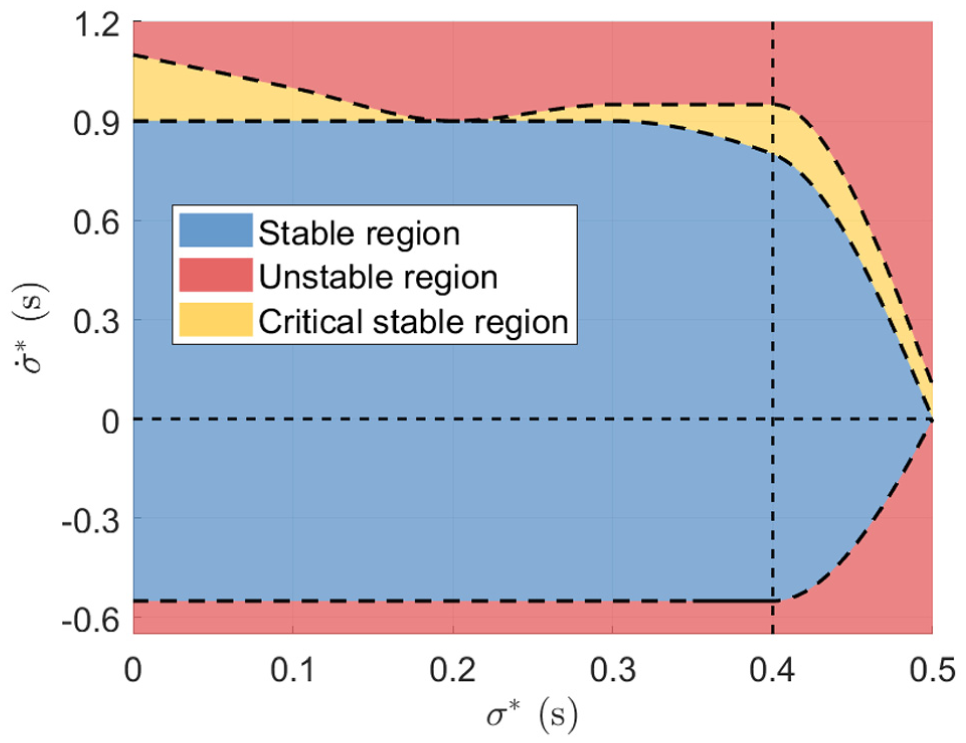
Lyapunov asymptotic stability region under varying communication delays and delay derivatives.
Three characteristics emerge from the stability analysis. First, the stable region extends asymmetrically with respect to
Second, the critical stability boundary narrows sharply near
Third, the stable region contracts dramatically beyond
Head-to-Tail String Stability Analysis
String stability evaluates a vehicle’s ability to attenuate velocity disturbances from its predecessor via the head-to-tail transfer function. Understanding the relationship between control weights and time delays is essential for maintaining stability in mixed platoons.
In a platoon of consecutive vehicles, let

where
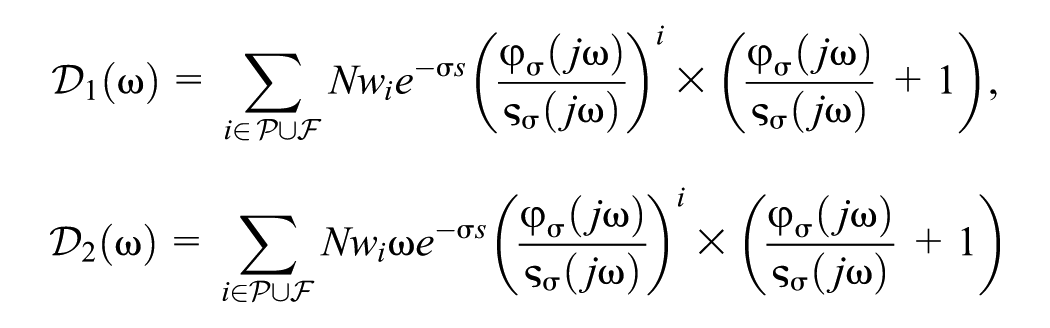
The system is head-to-tail string stable if and only if:

where
We analyze string stability in a mixed platoon with
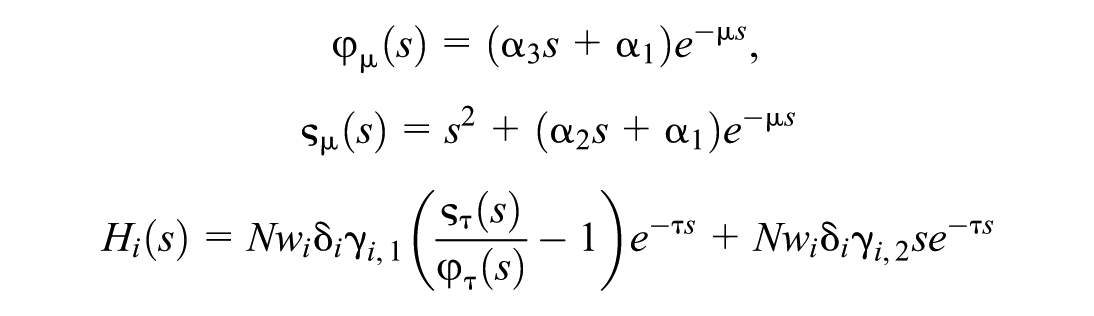
From the Laplace transform of the HDV car-following model, the local transfer function is:

where

Combining the CAV dynamics and HDV models, the head-to-tail transfer function for the mixed platoon is:

where
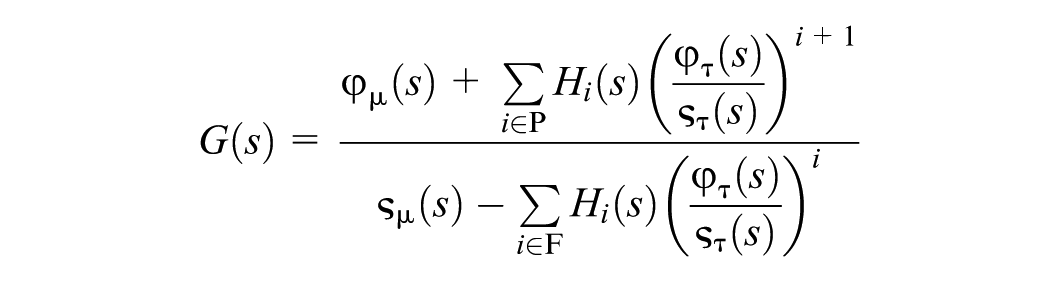
with
For feedback from multiple vehicles, the controller gains


where
Assuming the CAV acquires information from two vehicles ahead and two behind, Figure 4 shows the impact of control gains on string stability under different delay conditions.
Influence of control gains and time delay on head-to-tail string stability of mixed platoon.
Figure 4 illustrates the impact of control gains
Figure 4 systematically explores string stability boundaries across five levels of mean communication delay (
Figure 5 systematically explores string stability boundaries across five mean delay levels and two delay deviation levels. When mean delay is low (
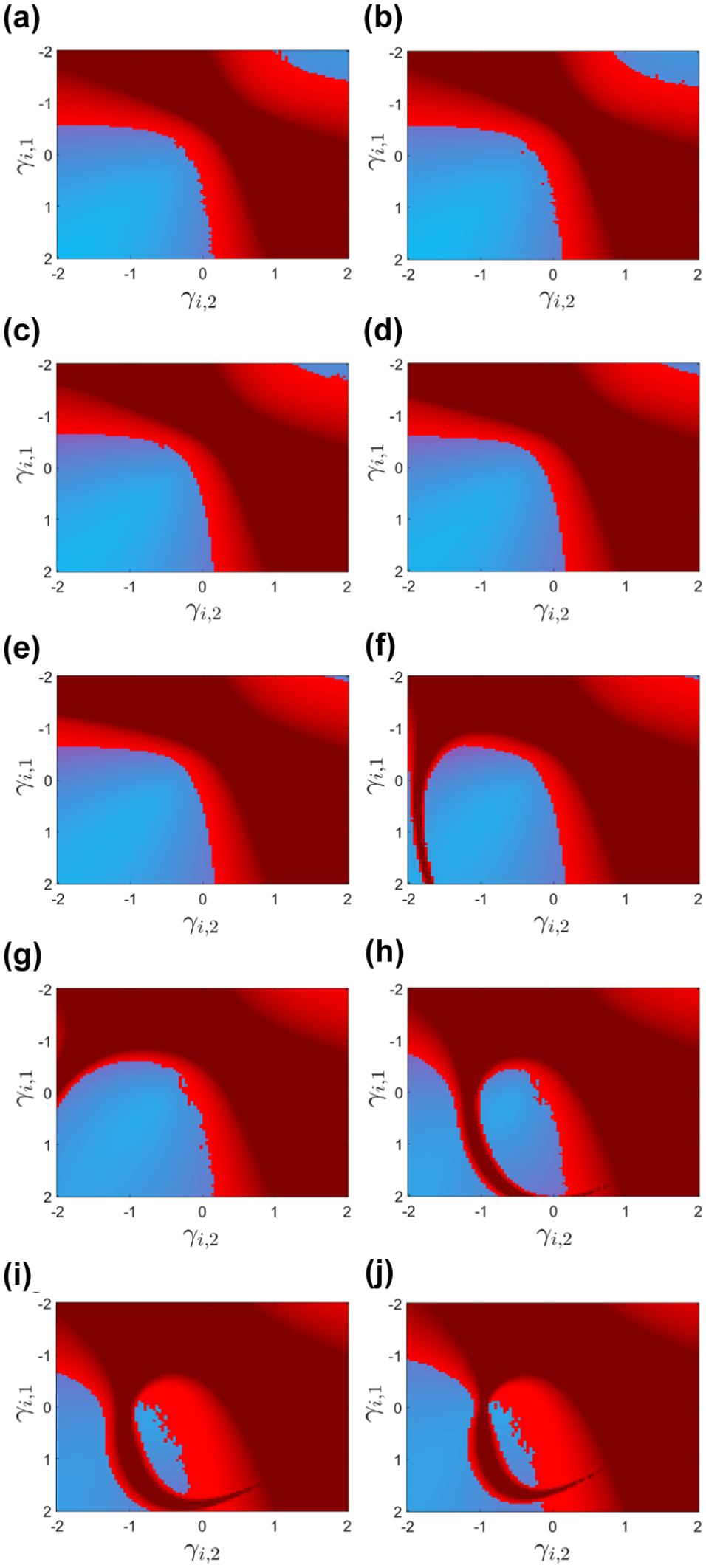
Head-to-tail string stability regions under varying communication delays and delay deviations: (a)
Comparative Experiments on Communication Range and Controller Strategies
This section presents comparative experiments to evaluate the effects of communication range and controller strategies on the stability of mixed platoons. The experiments compare the adaptive feedback mechanism of DWLCC with the static configuration of leading cruise control (LCC) under varying communication conditions ( 42 ).
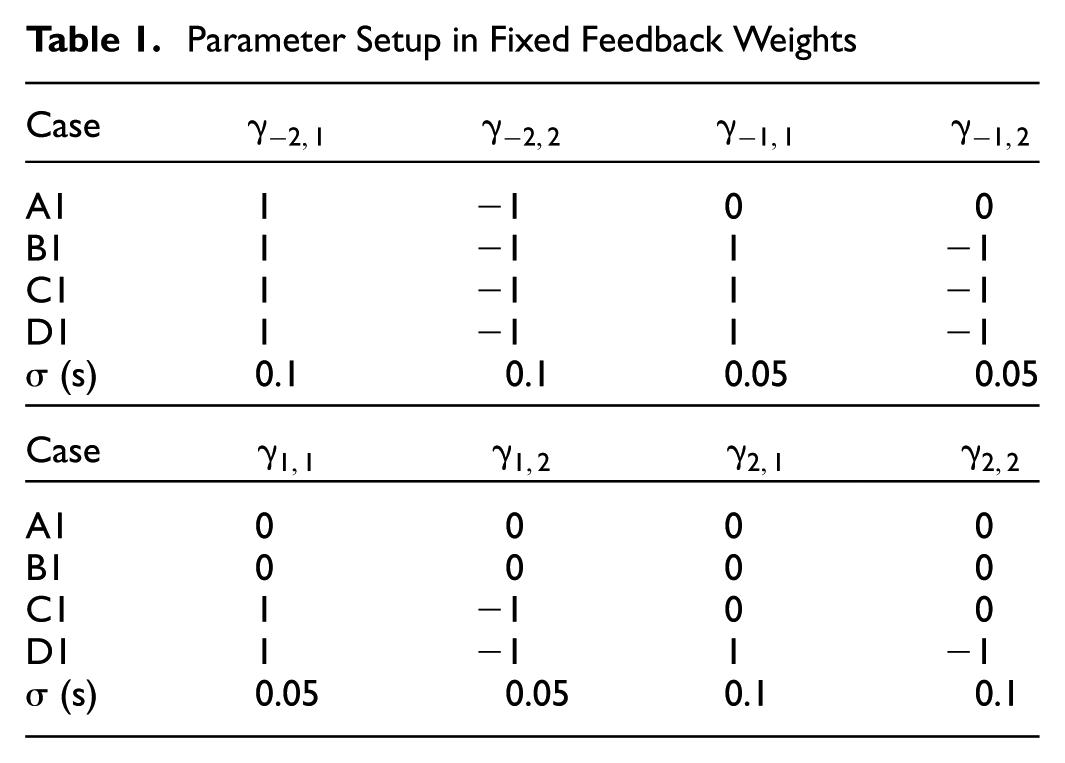
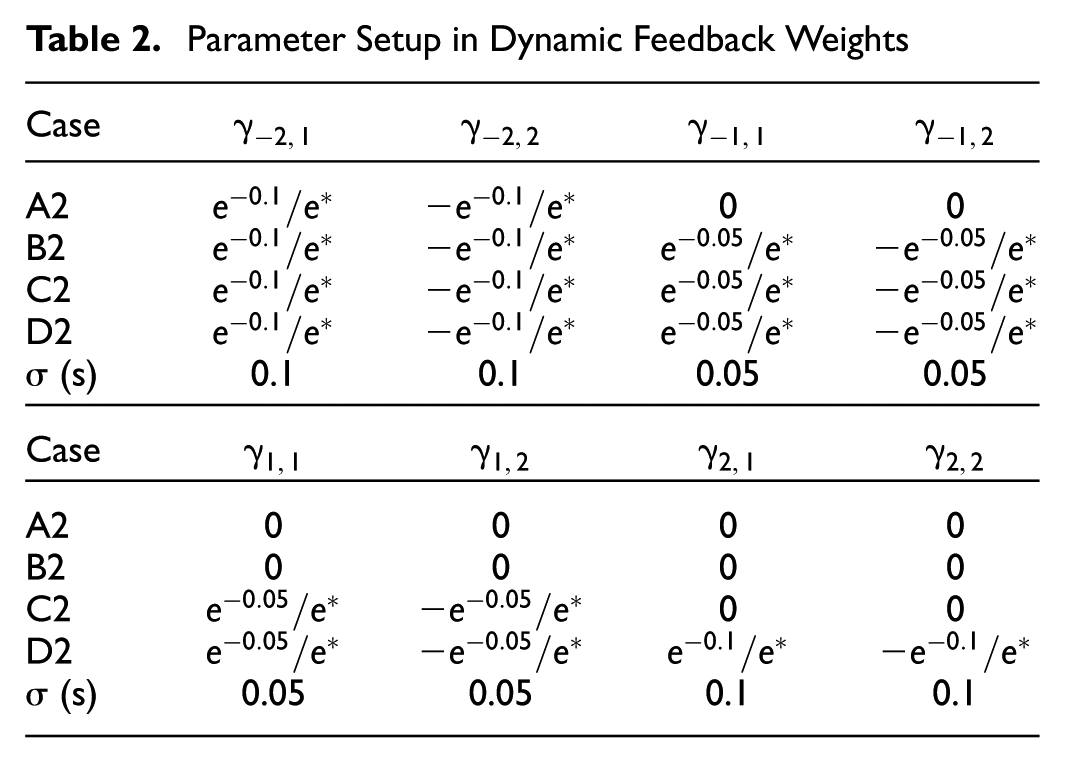
Table 1 presents the fixed feedback weights for different cases in the mixed platoon, specifying the CAV’s response to preceding and following HDVs. Cases A to D define distinct weights settings for interactions with one or two vehicles ahead or behind. Both fixed and dynamic weights adjust based on speed and spacing, but dynamic feedback weights, shown in Table 2, also adapt according to communication delays, providing more flexibility in response to changing platoon conditions. Additionally,
Parameter Setup in Fixed Feedback Weights
Parameter Setup in Dynamic Feedback Weights
The results in Figure 6 analyze the frequency response of the mixed platoon under various communication conditions, evaluating the impact of the DWLCC strategy on system performance. Figure 6a presents the magnitude of the transfer function
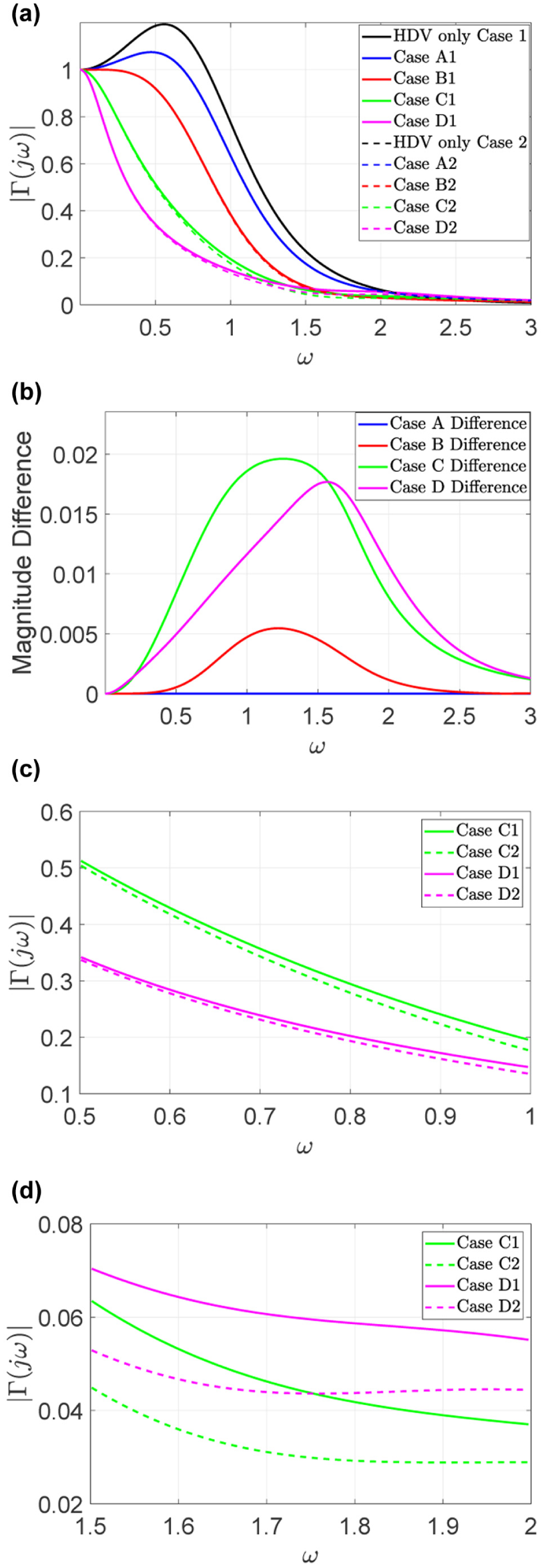
Frequency-domain response: (a) magnitude of the transfer function
Figure 6b compares performance across cases A, B, C, and D, with case D showing the most significant differences, suggesting greater dynamic adjustments than other scenarios.
Figure 6, c and d , shows response magnitudes for cases C and D over different frequency ranges. Scenario 2 exhibits consistently lower response magnitudes, demonstrating the effectiveness of the DWLCC controller in improving stability by dynamically adjusting control weights. Lower response magnitudes indicate that DWLCC effectively dampens system reactivity, ensuring robust performance under various frequency conditions.
Numerical Experiments
This section validates the DWLCC through simulation under varied communication delays, comparing its performance against the LCC.
The communication delay
Comparison between DWLCC and LCC under Mixed Platoon
We present simulation results by employing nonlinear car-following models. In particular, the nonlinear OVM model is utilized for modeling longitudinal behaviors of HDVs, where
To evaluate the robustness of the proposed DWLCC under realistic traffic perturbations, we introduce an emergency braking disturbance into the simulation:

This disturbance magnitude approaches the maximum deceleration limit, representing an extreme but realistic scenario, such as a human driver’s sudden reaction to perceived hazards or unexpected traffic conditions. The 1 s duration mimics typical emergency braking events observed in naturalistic driving studies.
1) Safety Performance
To assess the rear-end collision risk within mixed platoons, we implement two surrogate safety measures: time integrated time-to-collision (TIT) and time exposed time-to-collision (TET) (
44
). The TET metric quantifies the total duration during which vehicles remain in critical safety scenarios, specifically when the time-to-collision (TTC) drops below a predefined threshold
Let

The TET at each time step is computed as:

where

The total TET over the simulation period is:

Similarly, the TIT at each time step captures the severity of critical situations:

for
Figure 7 presents the comparative results of TET and TIT under varying communication delays and TTC thresholds. Figure 7, a–c, shows that DWLCC maintains lower TET and TIT values than LCC, especially under larger delays. The increase in TET and TIT for DWLCC is more gradual, particularly at higher thresholds, indicating superior transmission efficiency. The highest recorded TET and TIT for DWLCC are 15.4 s and 8.9 s, respectively. In contrast, LCC shows a sharp increase in these metrics around a TTC threshold of approximately 3.5 s, with TET and TIT peaking at 81.75 s and 83.4 s, respectively, indicating a rapid decline in transmission performance.
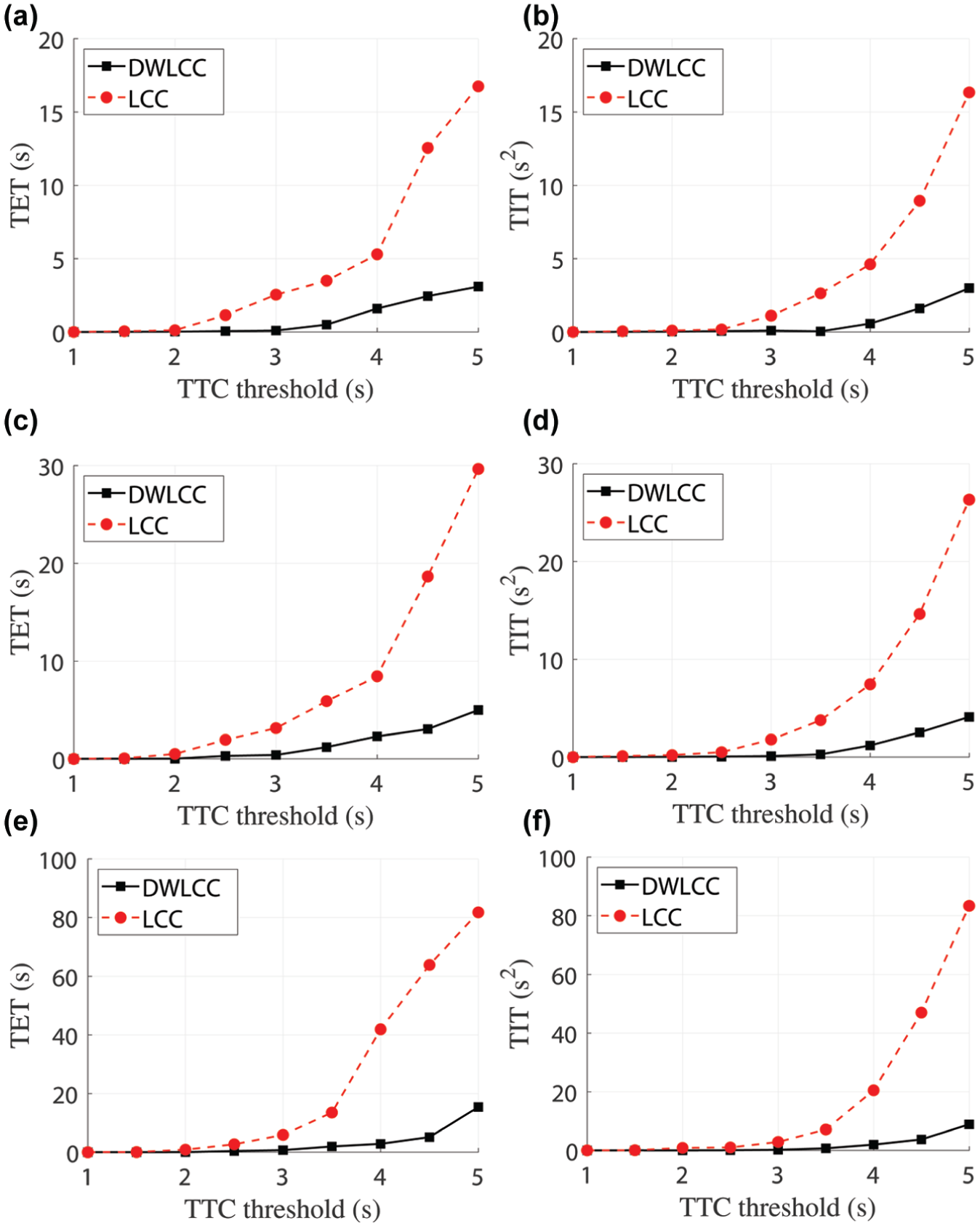
Comparison results of time exposed time-to-collision (TET) and time integrated time-to-collision (TIT) under varying communication delays: (a) TET under
2) Fuel Consumption Performance
An instantaneous fuel consumption model is utilized to calculate the fuel consumption rate

where
Then, we calculate the fuel consumption of every vehicle (Figure 8, a–c) and the total mixed vehicle platoon (Table 3) throughout the simulation from
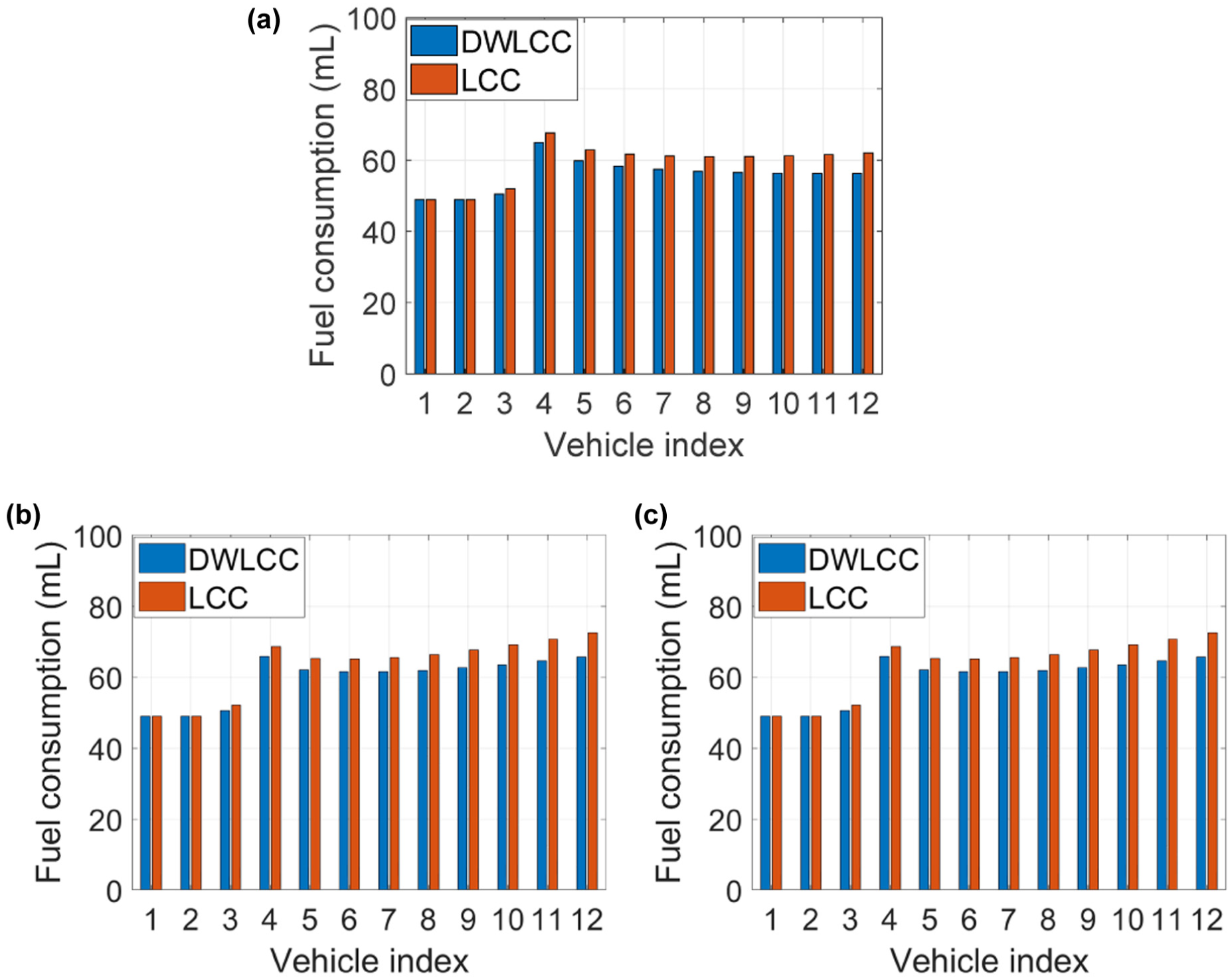
Comparison results of fuel consumption under different communication delays: (a) fuel consumption profiles under
Fuel consumption under different delays is shown in Figure 8. Across all delay conditions as shown in Figure 8, a–c, DWLCC achieves lower fuel consumption than LCC. For time delays up to 0.2 s, the DWLCC strategy enables even a single CAV to efficiently mitigate disturbance effects, keeping the fuel consumption of all vehicles lower than that of the 4th vehicle. This comparative analysis highlights DWLCC’s superior performance in reducing fuel consumption, achieving up to a 5.6% reduction in overall platoon fuel usage. Table 3 further underscores DWLCC’s effectiveness, showing a reduction in the total fuel consumption of the mixed platoon.
Total Fuel Consumption
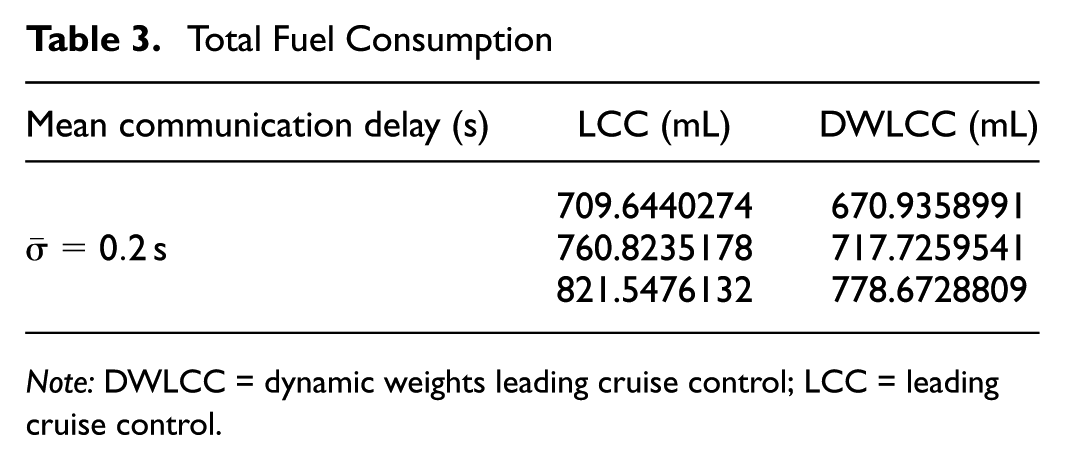
Note: DWLCC = dynamic weights leading cruise control; LCC = leading cruise control.
3) Mobility Performance
Velocity error comparison is presented in Figure 9. Figure 9a shows LCC with larger errors, while Figure 9b shows DWLCC with more uniform and smaller errors.
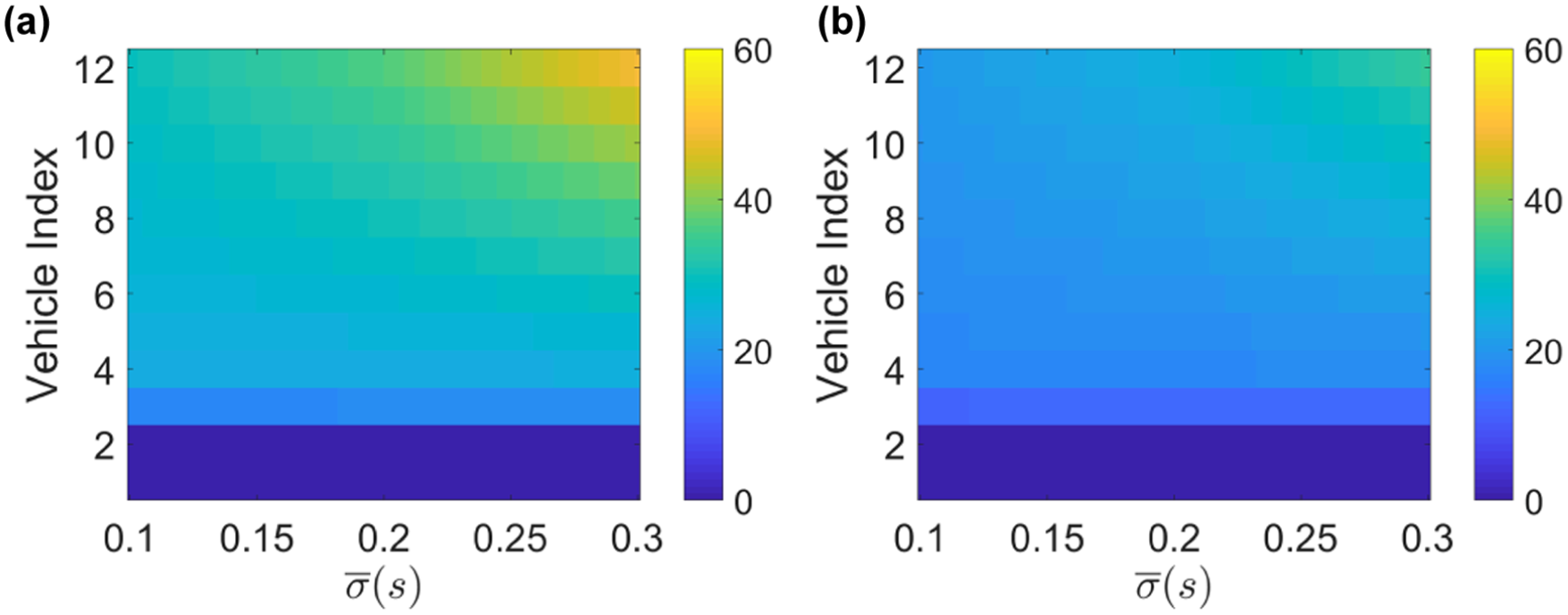
Comparison results of velocity error under varying communication delays: (a) velocity error heatmap for leading cruise control and (b) velocity error heatmap for dynamic weights leading cruise control.
Overall, it can be observed that the velocity error for both LCC and DWLCC increases with the increase in time delay. However, the trend is more pronounced for LCC. For LCC, as the mean time delay increases from 0.1 s to 0.3 s, the overall color in the heatmap changes progressively from blue to yellow, indicating a substantial increase in velocity error. This demonstrates that the fixed weight controller is more sensitive to time delay variations, especially for larger time delays, leading to higher velocity errors. In contrast, for DWLCC, although the velocity error also increases with increasing time delay, the overall changes are more moderate.
For velocity error distribution among different vehicles, the LCC heatmaps show that vehicles with smaller indexes (e.g., vehicle indexes 1–3) experience relatively lower errors, while vehicles toward the end of the platoon (e.g., indexes 10–12) tend to have higher errors. This suggests that the fixed weight controller struggles to mitigate the propagation of velocity fluctuations through the platoon, with the trailing vehicles being most affected. On the other hand, DWLCC exhibits a more even distribution of velocity errors across the entire vehicle platoon, indicating that the dynamic weight controller effectively reduces the accumulation and transmission of velocity errors, leading to more stable control throughout the platoon.
Figure 10, a and b , shows the spacing errors for LCC and DWLCC, respectively, under the same time delay conditions. Similar to the velocity errors, the spacing errors for LCC increase as the time delay grows, particularly for the trailing vehicles. This indicates that DWLCC is capable of maintaining more consistent inter-vehicle spacing, even as the time delay increases, further demonstrating its robustness.
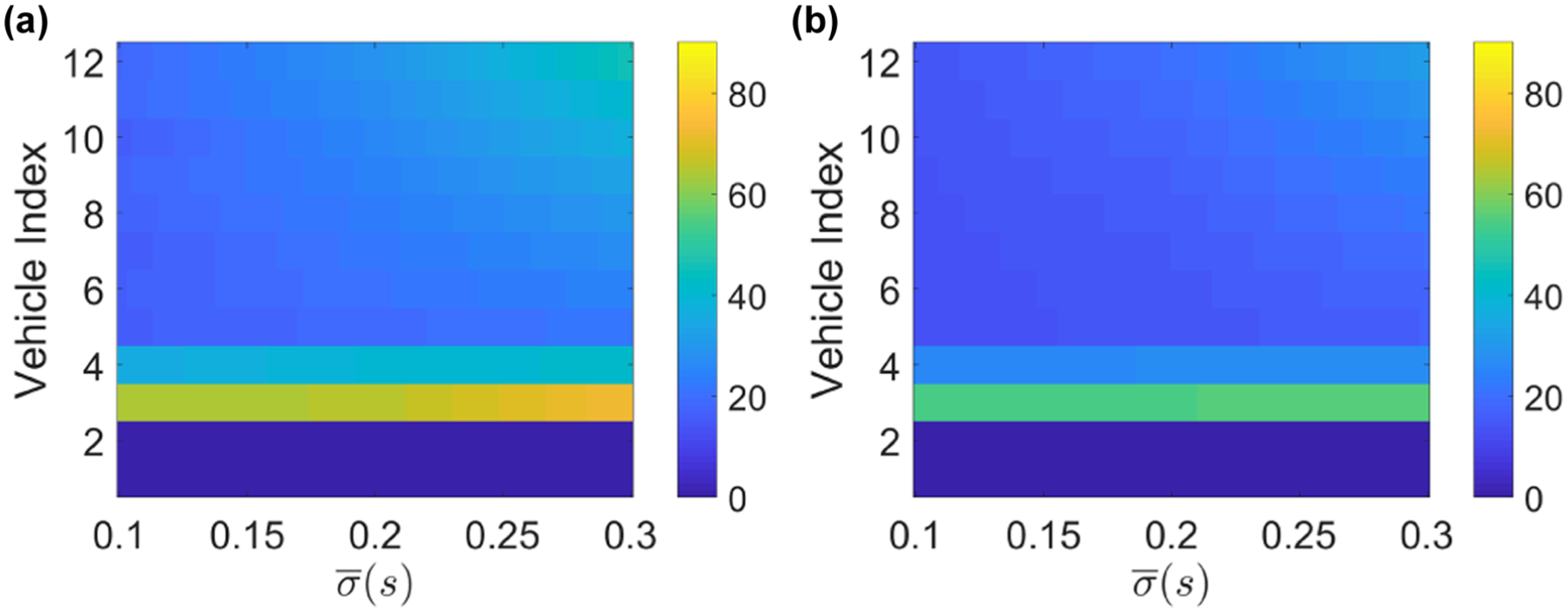
Comparison results of spacing error under different communication delays: (a) spacing error heatmap for leading cruise control and (b) spacing error heatmap for dynamic weights leading cruise control.
For spacing error distribution among different vehicles, LCC shows a noticeable increase in errors for the trailing vehicles. On the other hand, DWLCC manages to maintain a more balanced spacing error across all vehicles. This suggests that DWLCC effectively controls the propagation of spacing discrepancies through the platoon, resulting in more uniform performance.
This section reveals the spatial patterns of the platoon’s response to the emergency braking disturbance. Vehicle 4, subjected to the deceleration pulse, exhibits peak fuel consumption and acceleration magnitudes because of the severe braking and subsequent recovery to equilibrium velocity. In conclusion, comparing the performance of LCC and DWLCC under different time delays, it is evident that DWLCC demonstrates superior adaptability and robustness. While LCC is highly sensitive to time delays, especially under larger delays, resulting in significant velocity and spacing errors, particularly for the trailing vehicles in the platoon, DWLCC shows a relatively stable control performance as the time delay increases. The DWLCC controller maintains balanced velocity and spacing errors across all vehicles, effectively reducing error propagation and enhancing the stability of the entire platoon. This highlights that DWLCC is better suited for complex traffic environments with varying time delays, as it improves overall stability and safety compared with LCC.
Comparison with State-of-the-Art Methods
To comprehensively validate the proposed DWLCC strategy, we compare it against three representative delay-handling approaches commonly used in connected vehicle platoon control: multi-anticipative control (MA), model predictive control (MPC)-based delay compensation, and observer-based robust control (
16
–
27
). Each method is configured according to its typical information flow topology: MA, MPC, and observer-based methods utilize preceding vehicle information (
The MA approach employs fixed weights that prioritize closer vehicles, with
Table 4 presents the comparison results under three delay conditions. DWLCC achieves the best performance across all metrics and delay conditions. Under high delay (
Performance Comparison with State-of-the-Art Methods
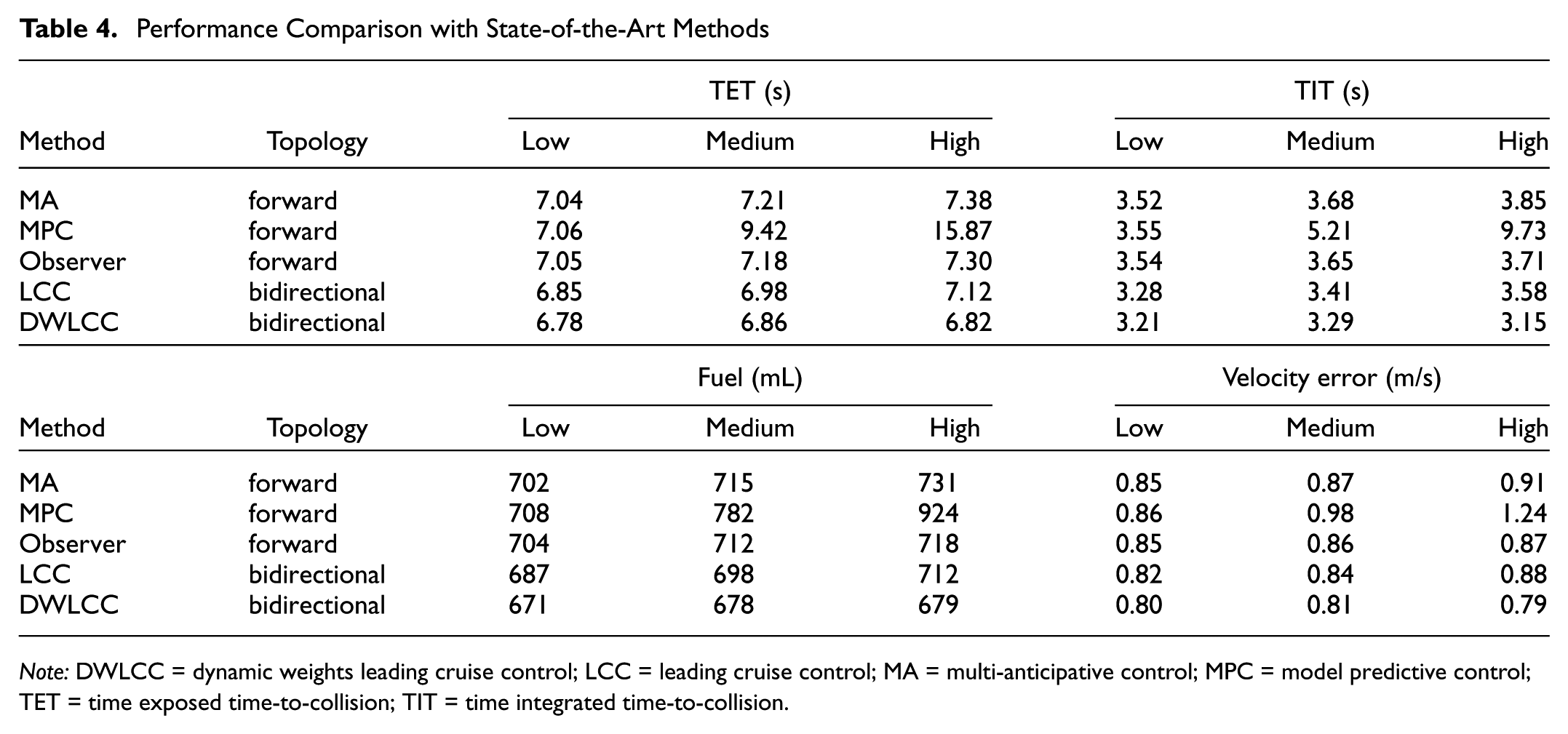
Note: DWLCC = dynamic weights leading cruise control; LCC = leading cruise control; MA = multi-anticipative control; MPC = model predictive control; TET = time exposed time-to-collision; TIT = time integrated time-to-collision.
Ablation Study on Dynamic Weighting Components
This section presents an ablation study to evaluate the contribution of different components in the proposed dynamic weighting mechanism. The study compares four configurations: 1) fixed uniform weights as the baseline, 2) delay-only weights, 3) quality-only weights, and 4) DWLCC, which combines both delay and quality components. The study is conducted under three different delay conditions: low (0.1 s), medium (0.2 s), and high (0.3 s). The performance results are summarized in Table 5.
Performance Comparison of Dynamic Weighting Components
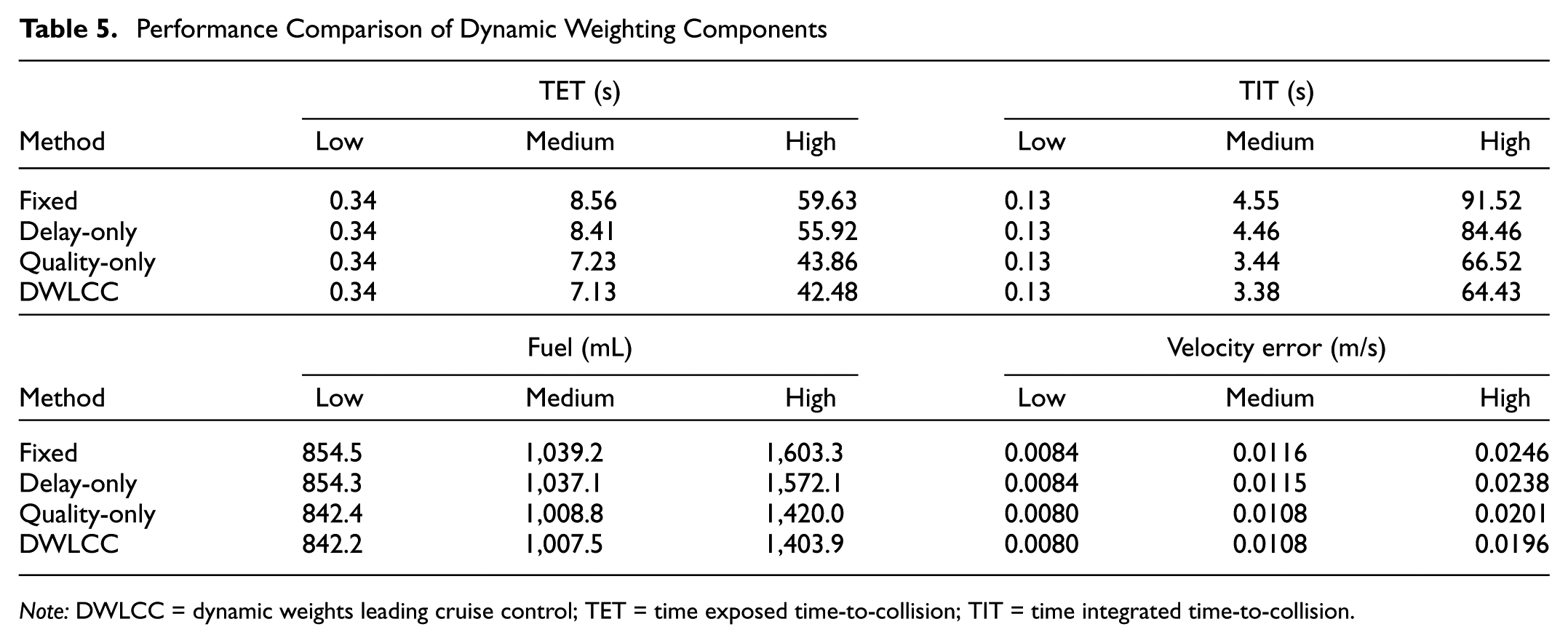
Note: DWLCC = dynamic weights leading cruise control; TET = time exposed time-to-collision; TIT = time integrated time-to-collision.
The platoon consists of 10 vehicles, with 1 leading vehicle and 9 following vehicles. The 4th vehicle is perturbed with either a braking disturbance or a sine-wave disturbance. The experiments are performed using the OVM, with key parameters including
The simulations are run for a total of 100 s, with a time step of 0.01 s. The configurations are evaluated under three delay conditions to assess the impact of delay and communication quality-based weighting on the performance of the platoon.
The results show that quality-based weighting significantly improves performance, particularly under high-delay conditions. Quality-only weighting reduces TET by 26.5% and fuel consumption by 11.4% compared with fixed weights when the delay is 0.3 s. This improvement is attributed to the ability of the quality metric to down-weight information from channels with packet loss or weak signal strength.
Delay-only weighting provides more modest improvements, with a 6.2% reduction in TET and a 1.9% reduction in fuel consumption under high delay. This indicates that, although delay information is valuable, the quality metrics capture additional factors beyond latency that contribute to the performance improvements.
The full DWLCC configuration, combining both delay and quality components, achieves the best overall performance. It reduces TET by 28.8% and fuel consumption by 12.4% under high-delay conditions. The marginal improvement over the quality-only configuration suggests that both delay and quality components provide complementary information, with quality-based weighting being the dominant contributor.
These results validate the proposed dynamic weighting mechanism and demonstrate that combining delay awareness with communication quality assessment leads to the best platoon performance across all operating conditions.
Sensitivity Analysis of Design Parameters
To investigate the influence of key design parameters, we conduct sensitivity analysis on the delay sensitivity parameter
Table 6 summarizes the effect of
Sensitivity Analysis of
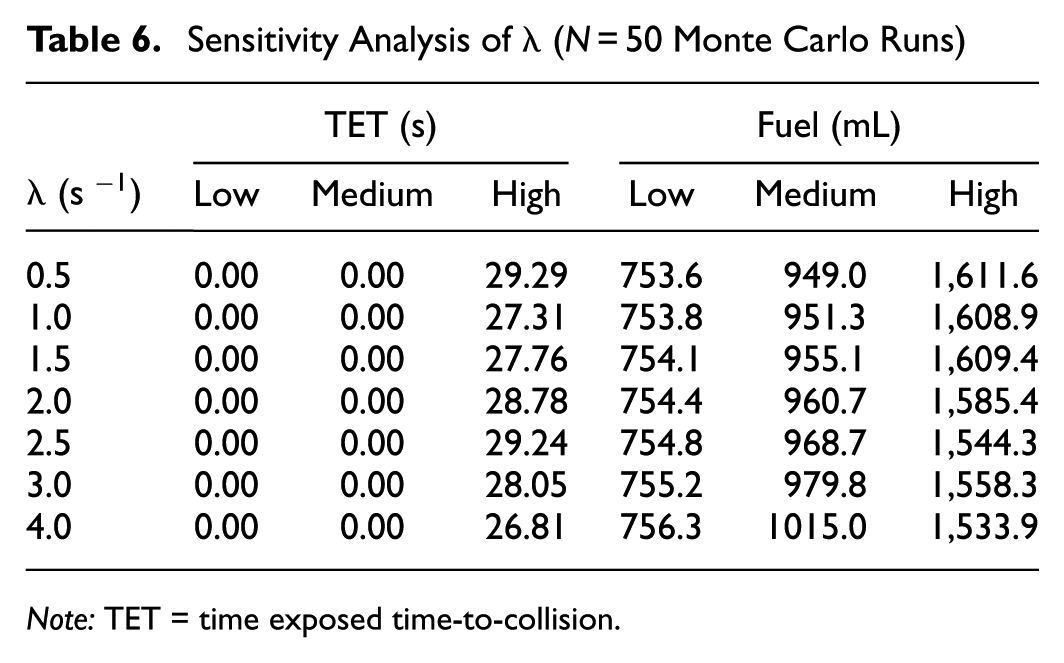
Note: TET = time exposed time-to-collision.
For quality weights, we evaluate five combinations with
Sensitivity Analysis of Quality Weights (
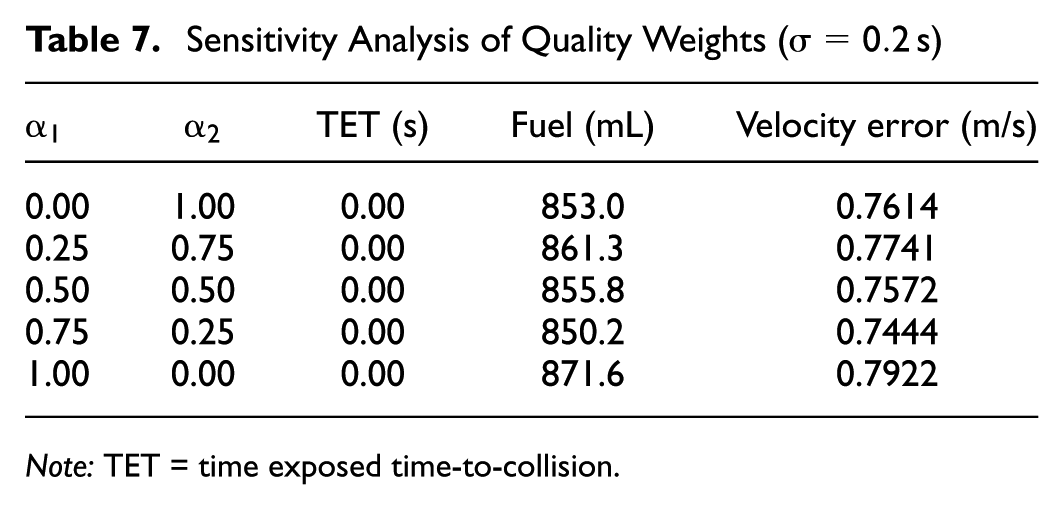
Note: TET = time exposed time-to-collision.
Robustness Analysis Under HDV Behavioral Heterogeneity
To evaluate the robustness of DWLCC against stochastic variations in human driving behaviors, we conduct Monte Carlo sensitivity analysis with heterogeneous HDV parameters. Real-world drivers exhibit diverse characteristics in sensitivity, aggressiveness, and reaction times. We model this heterogeneity by introducing random variations in the OVM parameters for each HDV:

where
Table 8 summarizes results from 50 Monte Carlo simulations with randomly generated parameter sets. While both controllers achieve similar mean performance, DWLCC demonstrates notably lower performance variability across all metrics. The standard deviation reductions of 10.1% for fuel consumption, 7.9% for velocity error, and 4.8% for spacing error indicate that DWLCC maintains more consistent performance under behavioral heterogeneity. This enhanced robustness stems from the dynamic weight adjustment mechanism, which automatically adapts control priorities based on real-time communication conditions rather than relying on fixed weights that may become suboptimal when actual driver behaviors deviate from nominal assumptions.
Performance under Human-Driven Vehicle Parameter Heterogeneity (± 20%, N = 50)
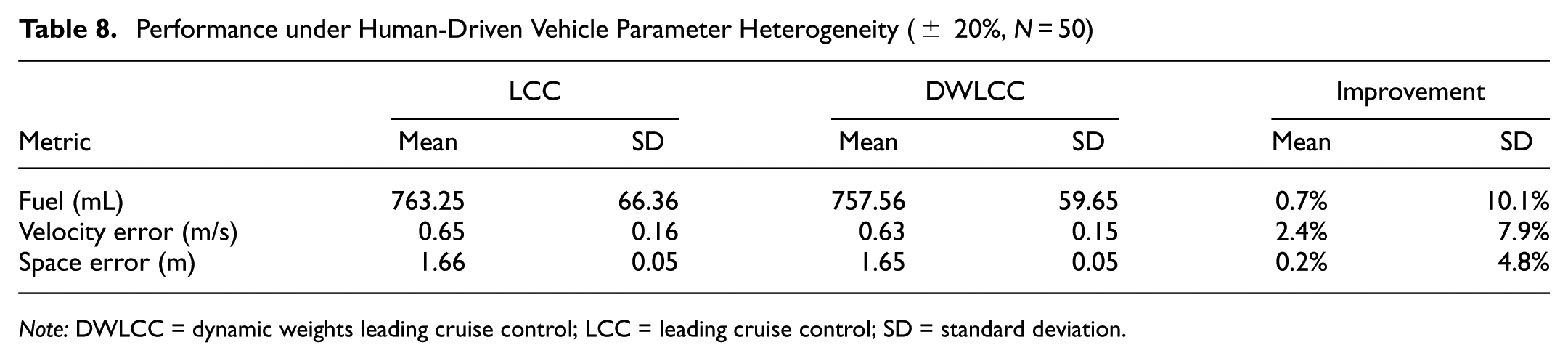
Note: DWLCC = dynamic weights leading cruise control; LCC = leading cruise control; SD = standard deviation.
Stability Performance Analysis under Different CAV Penetration Rates
Figure 11 illustrates the driving state curves of mixed vehicle platoons under four different scenarios when the 4th vehicle introduces a disturbance at 20 s. The results show that, with increasing CAV presence, the disturbance’s propagation speed and positional fluctuations markedly decrease. In Figure 11a, The disturbance propagates quickly through the platoon, resulting in fluctuations in vehicle positions. In Figure 11b, The propagation speed of the disturbance is reduced, and the positional fluctuations are less pronounced. In Figure 11, c and d , the disturbance is notably suppressed, resulting in minimal positional fluctuations.
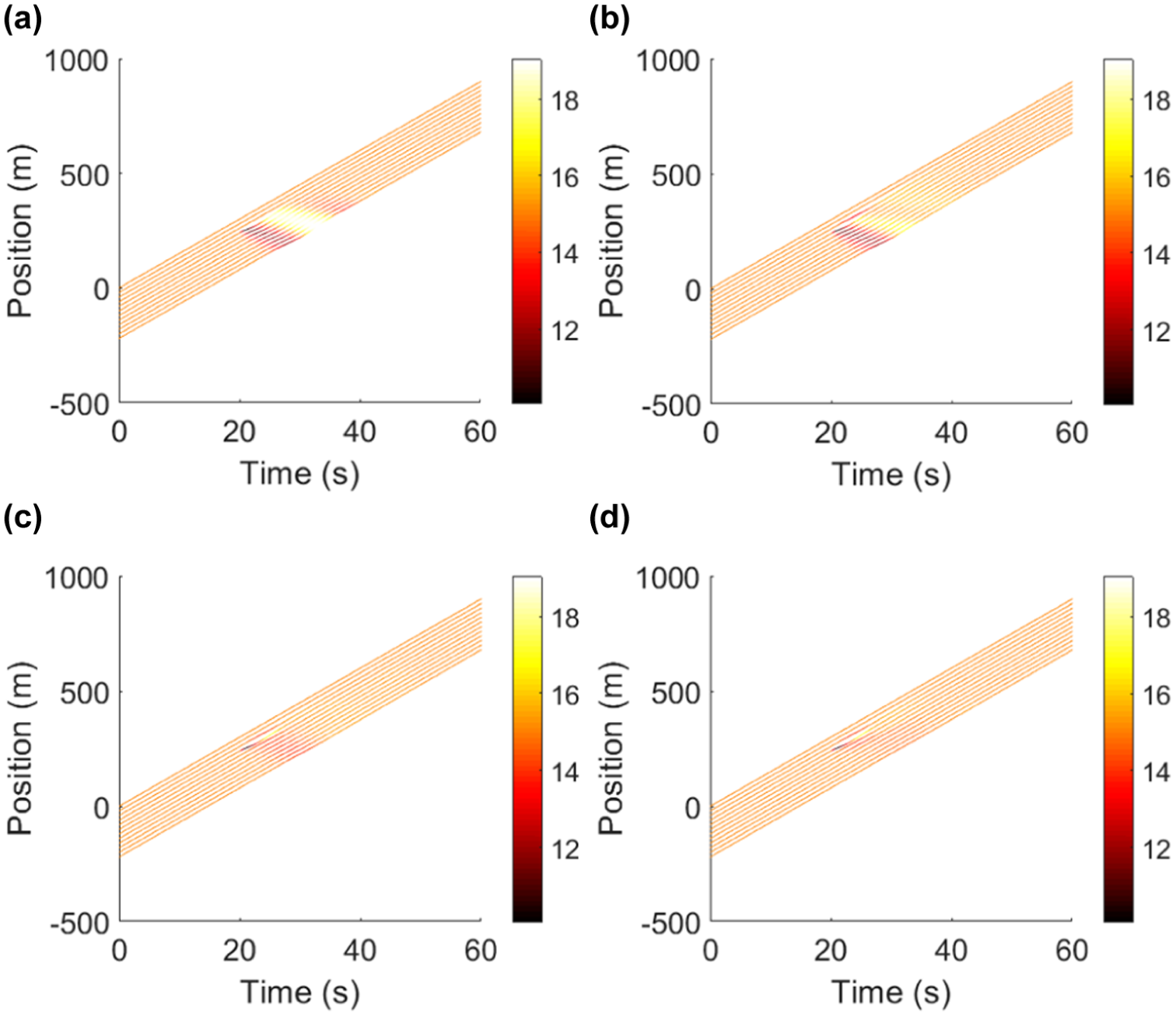
Mixed platoon driving state curves under different connected and automated vehicle (CAV) penetration rates: (a) purely human-driven vehicle platoon, (b) mixed platoon with one CAV, (c) mixed platoon with two CAVs, and (d) mixed platoon with three CAVs.
Figure 12 illustrates the spacing and velocity errors over time for the same simulation scenario as Figure 11. These results collectively demonstrate that increasing the number of CAVs in a vehicle platoon substantially enhances its stability and resilience to disturbances. The ability of CAVs to communicate and coordinate their actions leads to faster error damping and reduced oscillations, contributing to a smoother and more stable traffic flow.
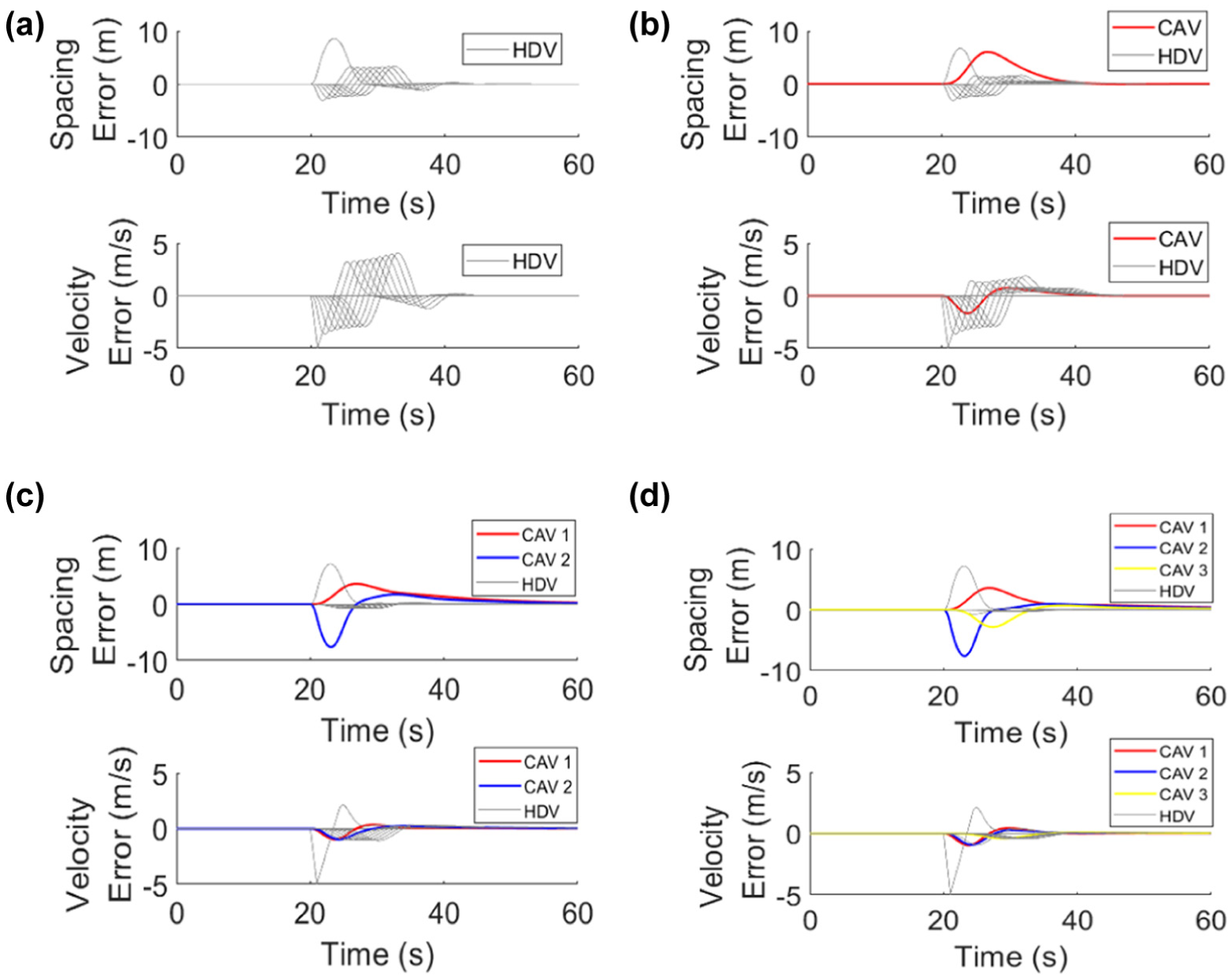
Spacing and velocity errors of mixed platoons under different connected and automated vehicle (CAV) penetration rates: (a) purely human-driven vehicle (HDV) platoon, (b) mixed platoon with one CAV, (c) mixed platoon with two CAVs, and (d) mixed platoon with three CAVs.
Figure 12a depicts a purely HDV platoon, where both spacing and velocity errors exhibit considerable oscillations after a disturbance, indicating a high sensitivity to perturbations. The errors take a considerable amount of time to dampen, reflecting the lack of coordinated control among human drivers. In Figure 12b, the introduction of a single CAV into the mixed platoon notably reduces both spacing and velocity errors compared with the HDV-only platoon. While errors still occur, their magnitudes are smaller, and they stabilize more quickly, demonstrating the positive impact of having even one CAV.
Figure 12, c and d , further illustrate that the presence of more than two CAVs in a mixed platoon greatly enhances its stability, making the platoon more resilient to disturbances and capable of maintaining consistent spacing and velocity.
The comparative analysis of Figure 11 and Figure 12 indicates that, as the penetration rate of CAVs increases, the platoon’s resistance to disturbances is improved. This is because CAVs can access information from both preceding and following vehicles, thereby reducing the propagation of disturbances through cooperative control and enhancing the overall stability of the platoon.
Conclusion
This paper presents a DWLCC strategy and stability analysis framework for mixed vehicle platoons under time-varying communication delays. An adaptive weight adjustment mechanism that dynamically prioritizes information sources based on real-time communication quality, demonstrating enhanced robustness compared with fixed-topology methods, is proposed.
Through Lyapunov-Krasovskii analysis and head-to-tail string stability evaluation based on linearized HDV dynamics, we derived explicit stability conditions that reveal critical relationships between communication delays, control gains, and platoon stability. These conservative conditions provide safety margins for unmodeled nonlinearities. Extensive simulations employing full nonlinear car-following models validate the effectiveness of the approach, showing significant improvements in safety, fuel efficiency, and error attenuation across various delay scenarios and CAV penetration rates.
The current analysis assumes small deviations from equilibrium through linearization. Extending the framework to accommodate large perturbations would require nonlinear stability analysis techniques, such as Lyapunov-based methods for nonlinear systems or input-to-state stability approaches, which may introduce additional computational complexity and more restrictive stability conditions. Furthermore, while the proposed DWLCC framework incorporates communication quality metrics, extreme scenarios involving severe packet loss beyond modeled ranges, non-ideal sensor behavior with measurement noise and latency, or complex urban environments with frequent topology changes and signal interference may pose additional challenges that warrant further investigation.
It should be noted that this study relies entirely on simulation-based validation. Related work has demonstrated that feedback delays and parasitic lags significantly affect string stability in automated vehicle systems through field experiments with Adaptive Cruise Control (ACC) vehicles, and theoretical-simulation studies have quantified the impacts of CAV platoons on road capacity and pollutant emissions under mixed traffic conditions ( 48 , 49 ). Future work should incorporate hardware-in-the-loop validation with realistic communication protocols and field experiments to bridge the gap between simulation and practical deployment. Additionally, adaptive learning mechanisms for heterogeneous driver behaviors and extended robustness analysis under degraded communication conditions represent important directions for enhancing the practical applicability of the proposed framework. This work establishes a rigorous foundation for delay-aware control in mixed platoons, providing both theoretical guarantees and practical design guidelines for safe CAV deployment in heterogeneous traffic environments.
Footnotes
Authors’ Note
ChatGPT has been used for language polishing of the manuscript.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: X. Wang; data collection: X. Wang; analysis and interpretation of results: X. Wang; draft manuscript preparation: X. Wang, P. Yang, B. Martinez-Pastor, R. Teixeira. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Key Research and Development Plan of China (Grant Nos. 2021YFA1000300, 2021YFA1000303), the European Union’s Horizon Europe research and innovation programme (Grant No. 101103695), the Fundamental Research Funds for the Central Universities, CHD (Grant No. 300102325501), and the Program of China Scholarship Council (Grant No. 202406560025).
Data Accessibility Statement
No data were used for the research described in this article.