
Abstract
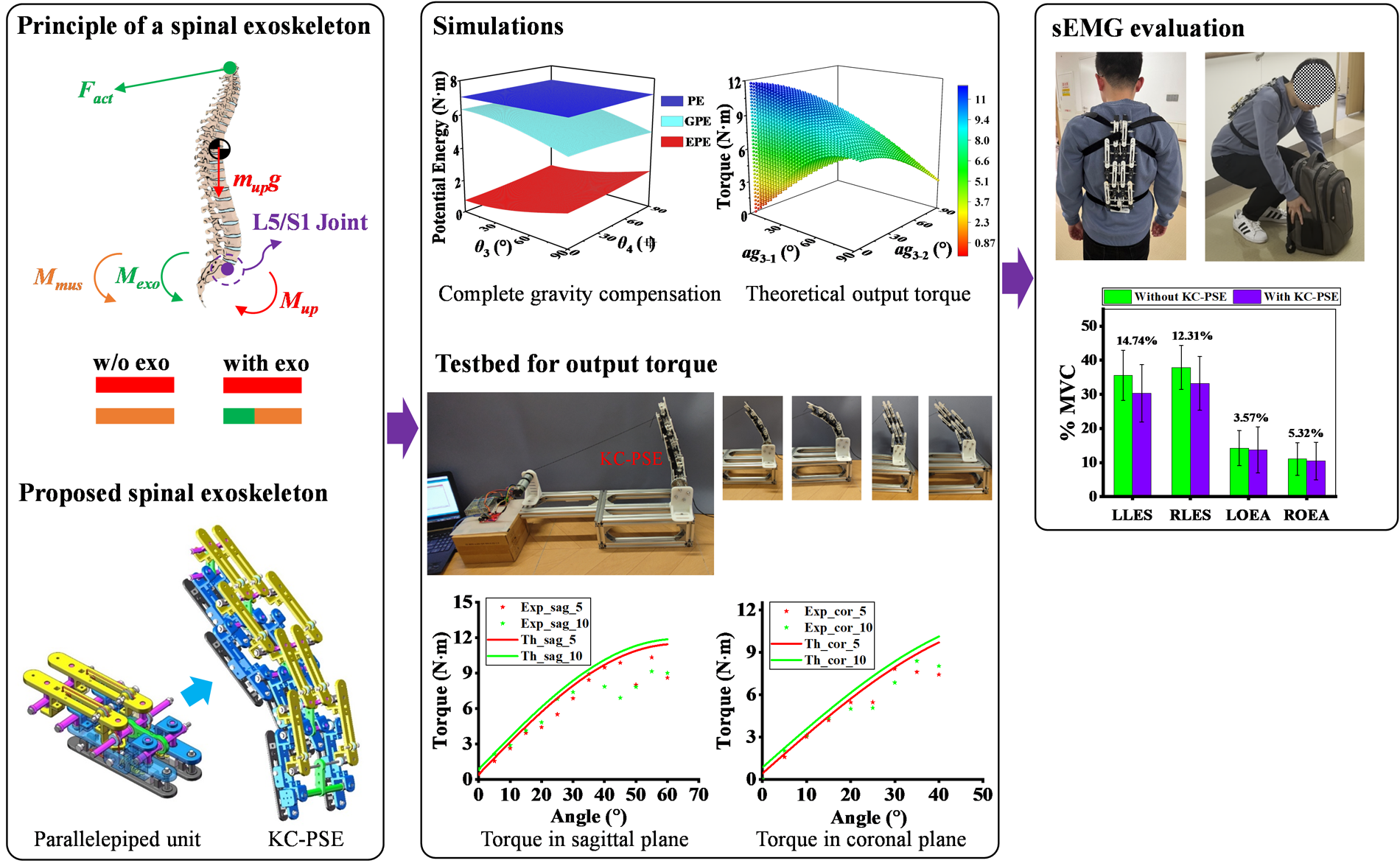
Prolonged stooping induces sustained high spinal loading and low back pain (LBP). While passive exoskeletons provide a potential solution, they are limited by poor kinematic compatibility and insufficient degrees of freedom (DOF). This study proposes a novel kinematic-compatible passive spinal exoskeleton (KC-PSE) using parallelepiped units. It offers multiple degrees of freedom to adapt to spinal motions in sagittal and coronal planes. Based on potential energy conservation, complete gravity compensation conditions are rigorously derived. Numerical simulations on a 4-unit design validate full gravity compensation, and distributed force models characterize output torque. Prototype tests confirm the exoskeleton effectively compensates gravity while tracking spinal motions, enhancing kinematic compatibility. This mechanism and framework provide a promising engineering-medical strategy for reducing spinal loads.
Get full access to this article
View all access options for this article.