
Abstract
Fractal geometries, inspired by patterns found in nature, offer a powerful framework for generating complex and adaptive forms through simple recursive rules. The application of these geometries in architectural design may enhance the structural efficiency. In this regard, this paper aims to evaluate the behavior of fractal grid-shell structures under both symmetric and asymmetric loading conditions. In order to assess the influence of different generation methods on the structural performance, the assumed fractal pattern is created based on three different strategies, including (a) a fully stochastic approach, (b) a deterministic approach with constant ratios in all iterations, and (c) a deterministic approach with independent ratios in each iteration. A conventional grid-shell structure with square cells is also adopted for comparison purposes. The generated planar patterns are mapped to three surfaces with different characteristics (i.e., spherical, hyperboloid, and hyperbolic surfaces) to form grid-shell structures. To achieve the optimal design of the considered structures, both single and multi-objective optimization approaches are used. Structural mass and maximum deflection are considered as two main goals to be minimized. The results highlight the effectiveness of fractal grids, in particular those created through the third strategy, in achieving optimized, lightweight structural systems under both loading conditions. The finding is confirmed through the comparison of structural mass in constant deflections and evaluating their stress and deflection distribution contours.
Introduction
With recent advancements in digital design tools and computational methods, traditional Euclidean geometries are increasingly being replaced by nonlinear and complex systems. Fractals, in particular, are considered as one of the newly emerged geometries increasingly utilized in various engineering fields. The self-similar and complex fractal forms can be generated through the recursive application of simple rules on multiple scales.1,2 The produced fractal geometries resemble nonlinear systems, providing the potential to create dynamic, organic, and adaptable forms.3,4
The initial concept of fractals was introduced by Mandelbrot in the 1970s, drawing inspiration from recurrent patterns observed in nature, such as coastlines, clouds, and branching trees. Fractals provide a connection between nature, mathematics, and architecture, enabling the creation of visually compelling patterns and efficient forms. 2 A few modeling approaches, such as Iterated Function Systems (IFS), L-systems, and geometric methods, are introduced for providing fractal patterns.5 –7 Either stochastic or deterministic approaches in the generation process of fractal geometry can be implemented. In deterministic approaches, the generation rules are strictly predefined, leading to a predictable final form. According to Falconer’s definition, these fractals exhibit exact self-similarity, where each magnified part of the pattern is an identical scaled copy of the whole. 8 While this guarantees reproducibility and control, it may not fully capture the irregularity and complexity of natural geometries. By contrast, stochastic approaches introduce controlled randomness into the generation process, resulting in a richer diversity of outcomes that better emulate natural phenomena. These stochastic fractals exhibit statistical self-similarity, meaning that while no two magnified regions are exactly alike, their statistical properties, such as distribution, roughness, or scaling laws, remain consistent across scales. 9 This property makes stochastic fractals particularly suitable for modeling the inherent irregularity of natural forms.10,11 Among stochastic fractals, the Chinese Ice-Ray lattice has been widely studied due to its balance between randomness and geometric integrity.12 –14
Stochastic methods are not exclusive to fractals; they have also been successfully applied to other geometric systems, such as cellular (Voronoi) structures. Apart from producing the complicated forms, the possibility of utilizing these stochastic geometries as a structural system has been evaluated by numerous researchers. Previous studies have shown a similar performance of Voronoi structures and regular grid structures under compression loads; however, the stress distribution and overall static performance of Voronoi systems are much better.15 –17 This suggests that stochastic geometries, whether fractal or Voronoi-based, can offer superior structural performance compared to traditional regular patterns. The more uniform stress distribution in Voronoi systems leads to reduced stress concentrations and improved load-bearing capacity. The optimum behavior of structures with irregular patterns with respect to the corresponding conventional grid patterns has also been confirmed in several studies.18 –20 They also present an almost excellent performance regarding the topological optimization, attracting the designers. 21
The effectiveness of natural fractal patterns in structural performance has also been confirmed in limited research, such as the investigations of the structure of bones. 17 The ability of these geometries to provide optimum load distribution through their recursive nature and flexibility is demonstrated by evaluating the irregular propagation of cracking in a glass. 22 Adopting these patterns into the structural systems may lead to a reduction in overall material usage as well as its destructive environmental consequences. 23 Beyond theoretical advantages, fractal geometries have found practical applications in modern engineering, such as branching columns and lightweight modern slabs with hollow sections. 5 The application of fractal forms in arch and lattice structures is the other example highlighting the effectiveness of these geometries in achieving optimum design solutions, increasing the structural stability, and the feasibility of construction.24 –26 Rian and Asayama 19 evaluated the behavior of stochastic fractal structures generated through the midpoint displacement method. Their analyses have shown that the application of fractal geometries as a structural system results in optimum load distribution and increases the structural stability. This further supports the potential of fractal-based designs in replacing conventional structural systems.
According to the discrete and recursive nature of fractal geometries, they can be properly applied to grid-shell structures. For instance, Stotz et al. 6 introduced a new algorithm to create fractal-based forms with the aid of mathematical relations. Although their proposed algorithm facilitates the construction of such complicated forms, their structural performance was not investigated. A few years later, Rian et al. 27 assessed the possibility of using the Takagi-Landsberg fractal surface as a structural system and proposed a visually interesting system on this basis. In another study, a novel structural morphology by incorporating stochastic fractals in lattice shell design was introduced. 28 The structural feasibility and efficiency of the introduced lattice shells were evaluated and compared with conventional grid shells. However, the structural investigations in their study are limited to the stability and stiffness analyses, and only the elements’ self-weight is considered in their simulations.
Despite the limited research on the application of fractals as a structural system, there remains a significant lack of thorough investigation into various aspects of their structural performance. The influence of different fractal generation methods on structural optimal design and material saving is one of the crucial gaps that has not yet been adequately explored. The current study aims to address this gap by providing a comprehensive assessment of fractal-based grid-shell structures. Specifically, the research questions are: (1) How do different fractal generation strategies, including stochastic and deterministic approaches, influence structural mass and maximum deflection? (2) How does the surface geometry affect the efficiency and performance of the resulting structures? To answer these questions, three distinct algorithms are adapted here to generate stochastic and deterministic fractal-based grid structures using a recursive subdivision rule. These structures are formed by mapping planar fractal geometries onto three commonly used surface types, representing different characteristics considering various Gaussian curvatures and having constant or variable radius. To evaluate their performance, both single and multi-objective optimization methods are employed. Structural mass and maximum deflection are identified as the key effective parameters aimed for minimization. A conventional square grid-shell structure is also analyzed as a benchmark, and its behavior is compared to that of the fractal-based models. Also, in order to achieve rational comparison, the structural mass of all considered models is assessed in constant deflections. The findings of this study provide new insights into the efficiency of fractal-based grid structures.
Fractal geometry
The initial concept of fractals and their application in mathematics dates back to the mid-1970s, when Mandelbrot defined a specific geometry to describe complex and chaotic natural forms. 3 The self-similarity is attributed as a main characteristic of the mentioned geometry. A few years later, Bovill 29 provided a clear definition of self-similarity, relating it to geometries formed by a scale factor. The new form produced according to his definition may be smaller, larger, rotated, or even transformed, as long as the relative distances and internal angles remain unchanged in each iteration. These geometries can be generated through deterministic methods exhibiting precise self-similarity. 30 However, the self-similarity of natural fractals is affected by inevitable randomness during their formation, meaning that subsequent generations may not produce exact scaled shapes. The second type, which uses randomness at different stages of generations while maintaining the same statistical properties, is often referred to as stochastic fractals with statistical self-similarity. 31 This type is widely used in architectural design to mimic natural patterns while maintaining structural integrity. Figure 1 depicts the Koch curve generated through deterministic and stochastic methods.

The application of deterministic and stochastic approaches in the Koch curve.
Recursion is the other key feature of fractal geometries, in which a specific rule is repetitively applied at each iteration to generate more complex forms [1 and 3]. This process typically begins with an initial seed (the initiator) and a transformation rule (the generator), which are applied iteratively. 30 Recursion has been naturally adopted by many systems in nature. 32 In stochastic fractals, the scale factors or transformation parameters at each iteration are applied randomly.33,34 The recursion process in generating the Koch curve, which exemplifies how simple rules can produce highly intricate patterns with infinite perimeter but finite area, is illustrated in Figure 2.
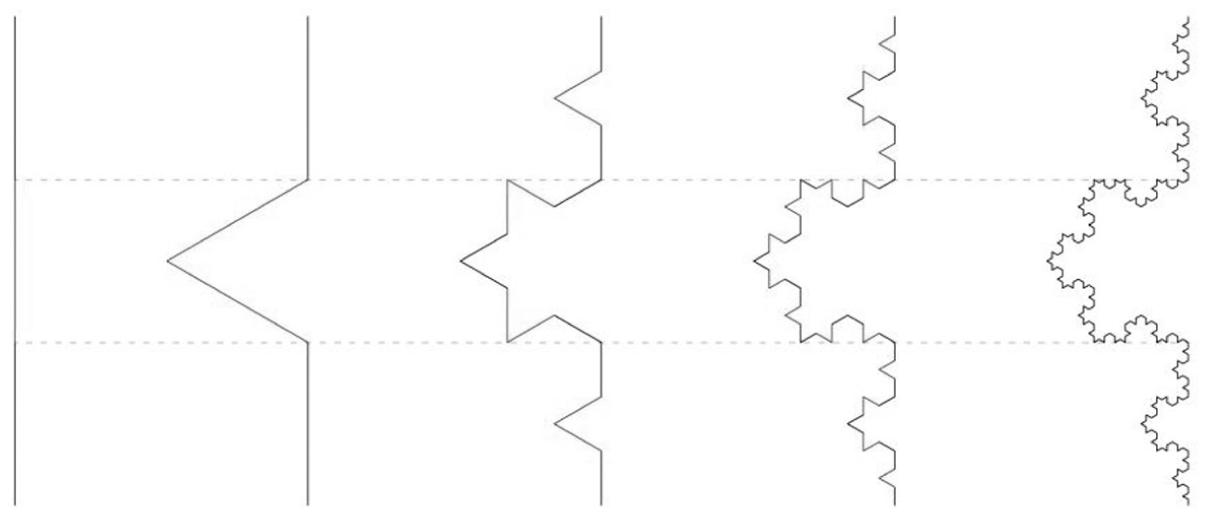
Generating the Koch curve using the recursion.
Despite the continuity of fractal curves, they are nowhere analytically differentiable. This feature, together with their non-integer dimension (fractal dimension), is considered as two other fractal characteristics, highlighting the geometric complexity of these forms. The box-counting method is a common procedure for calculating fractal dimensions of stochastic geometries.28,29 In this method, two different grid sizes are selected, and the number of grid cells intersecting the geometry is counted for each size. The fractal dimension is then estimated through equation (1).
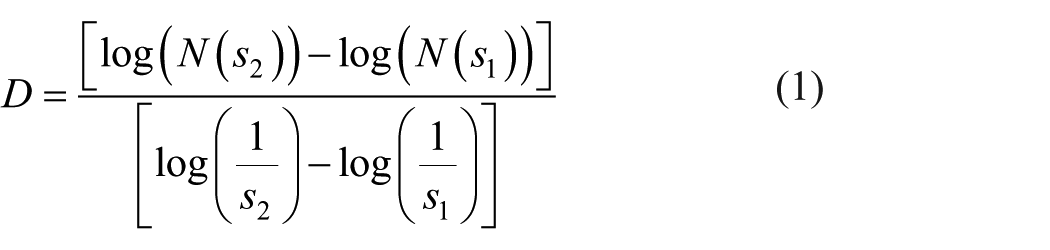
where
These four distinctive characteristics (self-similarity, recursion, non-differentiability, and fractal dimension) introduced a new mathematical framework for describing complex geometries that could not be represented by classical Euclidean forms [3 and 8].
Various approaches have been developed for generating fractal geometries. One of the common approaches is the geometric method. The recursive subdivision, polygonal replacement, and tree-based strategies are some well-known types of geometric categories which can be implemented through both deterministic and stochastic rules [8 and 30]. In the geometric method, a base shape is recursively transformed by applying simple rules, and depending on the chosen strategy, either random or fixed criteria determine the location of new points or elements. These general concepts establish the theoretical foundation for our study; however, the specific subdivision procedure and the strategies proposed in this work are introduced as a new contribution and are described in detail in the subsequent section.
Fractal structure based on a random pattern
Generation process of planar fractal pattern
The current section outlines the methodology for generating specific fractal planar patterns using the subdivision method. The procedure begins with an initial quad that is divided into four smaller sub-quadrants. The subdivision process is applied recursively to each sub-quadrant in subsequent iterations. At each step, a point is placed on each edge of a quadrant and connected to a randomly positioned point in a predefined central zone (A1), forming new sub-quadrants. Three distinct strategies are employed to produce these patterns, which differ in the method used to select points along the edge elements of the subdivided geometry. The first strategy employs a fully stochastic approach, where the point on each edge element is chosen randomly at every iteration. In this strategy, the ratio of the point along each edge is chosen randomly. While these ratios are preserved in subsequent iterations, the host edge element for each ratio is selected randomly. This procedure ensures the formation of a controlled stochastic fractal grid under this strategy. The second strategy adopts a deterministic approach in which the ratio of the relative distance of edge points with respect to their adjacent corner (ri) is held constant across all sub-quadrants and throughout all iterations. Strategy three also uses deterministic positioning; however, it allows these ratios to be revised independently for each sub-quadrant and in every iteration to provide greater geometric variation. A schematic representation of the generation process of all three strategies is provided in Figure 3, and the final resulting pattern according to the mentioned strategies is demonstrated in Figure 4 for four iterations.
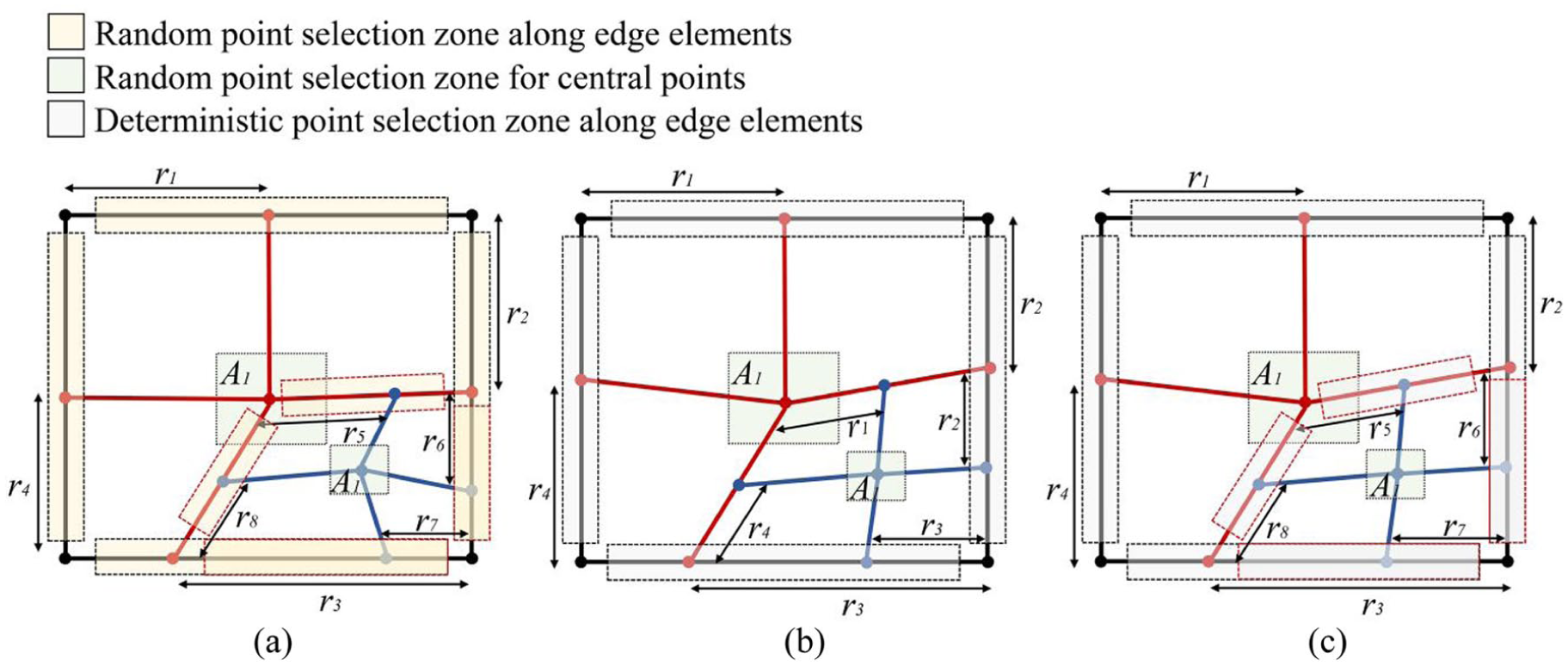
Schematic description of the generation process of fractal geometries: (a) strategy I (stochastic approach with different ratios at each iteration), (b) strategy II (deterministic approach with fixed ratios in different iterations), and (c) strategy III (deterministic approach with different ratios at each iteration).

Schematic illustration of fractal patterns generated through the proposed strategies: (a) initial shape (initiator), (b) first iteration (generator), (c) second iteration, (d) third iteration, and (e) fourth iteration.
Mapping planar fractal patterns onto curved shell structures
The mapping method is used here to create fractal-based grid-shell structures. The method is based on projecting the specified planar fractal patterns onto three-dimensional surfaces. In this approach, the vertical component (z-coordinate) of each point in the planar pattern is determined by evaluating a predefined surface function at its (x, y) coordinates. Each point is then shifted vertically according to the computed value. Therefore, the two-dimensional pattern is effectively mapped onto the target surface. In this study, three different types of surfaces, namely a spherical surface, a hyperboloid surface, and a hyperbolic surface, are selected for the mapping process. The selection of these three surfaces in this study aims to cover their distinct geometric properties. The spherical surface is characterized by positive Gaussian curvature and constant at all points. The hyperboloid is defined by positive Gaussian curvature, but not constant (varies with position). And, the hyperbolic surface is specified by negative Gaussian curvature and constant. The mathematical definitions of the considered surfaces are provided in equations (2)–(4).



where r is the radius of the spherical surface, a, b, and c are the scaling factors along the x, y, and z axes, respectively. Figure 5 illustrates an example of a spherical surface with r = 7, a hyperboloid surface with a = b = c = 5, and a hyperbolic surface with a = b = 5, and c = 2.
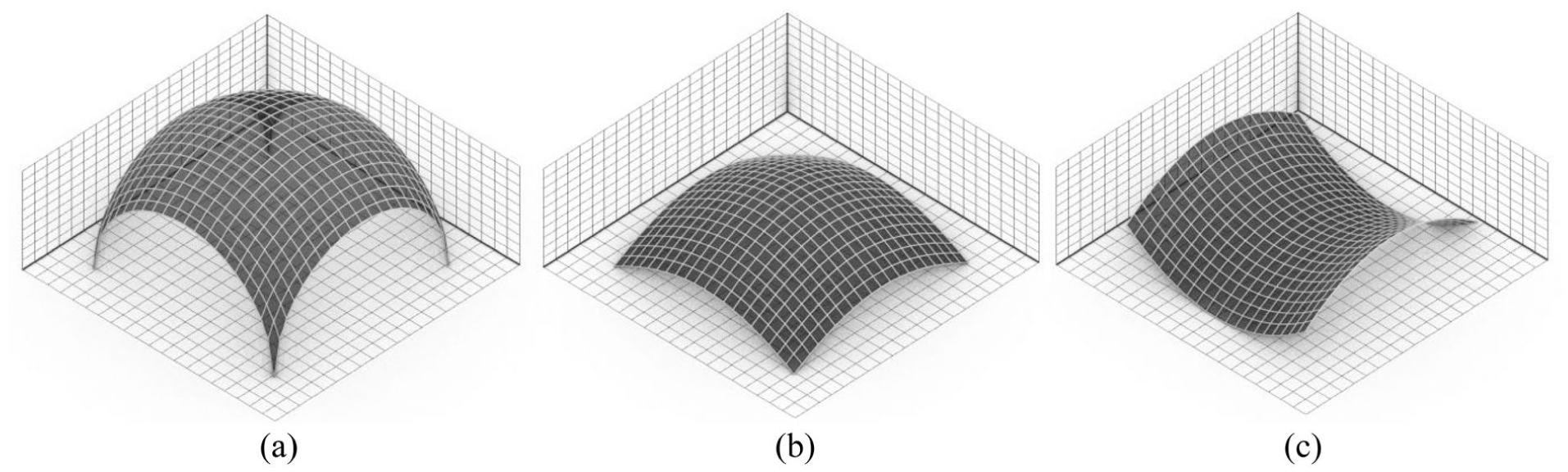
Curved surfaces used in the mapping process: (a) spherical, (b) hyperboloid, and (c) hyperbolic surfaces.
Structural modeling and parametric study
General design assumptions
The fractal grids generated using the three strategies described in section “Fractal structure based on a random pattern,” are studied to evaluate their structural performance and assess their feasibility as a design option for grid-shell structures. A conventional square grid-shell structure, the Ribbed dome, is also considered for the sake of comparison. A structural bay size of 10 m is assumed for all cases. To achieve rational element lengths, the number of iterations for fractal patterns is set to 2, 3, and 4, which are equivalent to the subdivision number of 4, 8, and 16 for the square grid. Therefore, a total of 36 separate models is considered, differing in generation methods, number of iterations, and target surfaces. The description of the considered models is summarized in Table 1.
The considered models in this study.
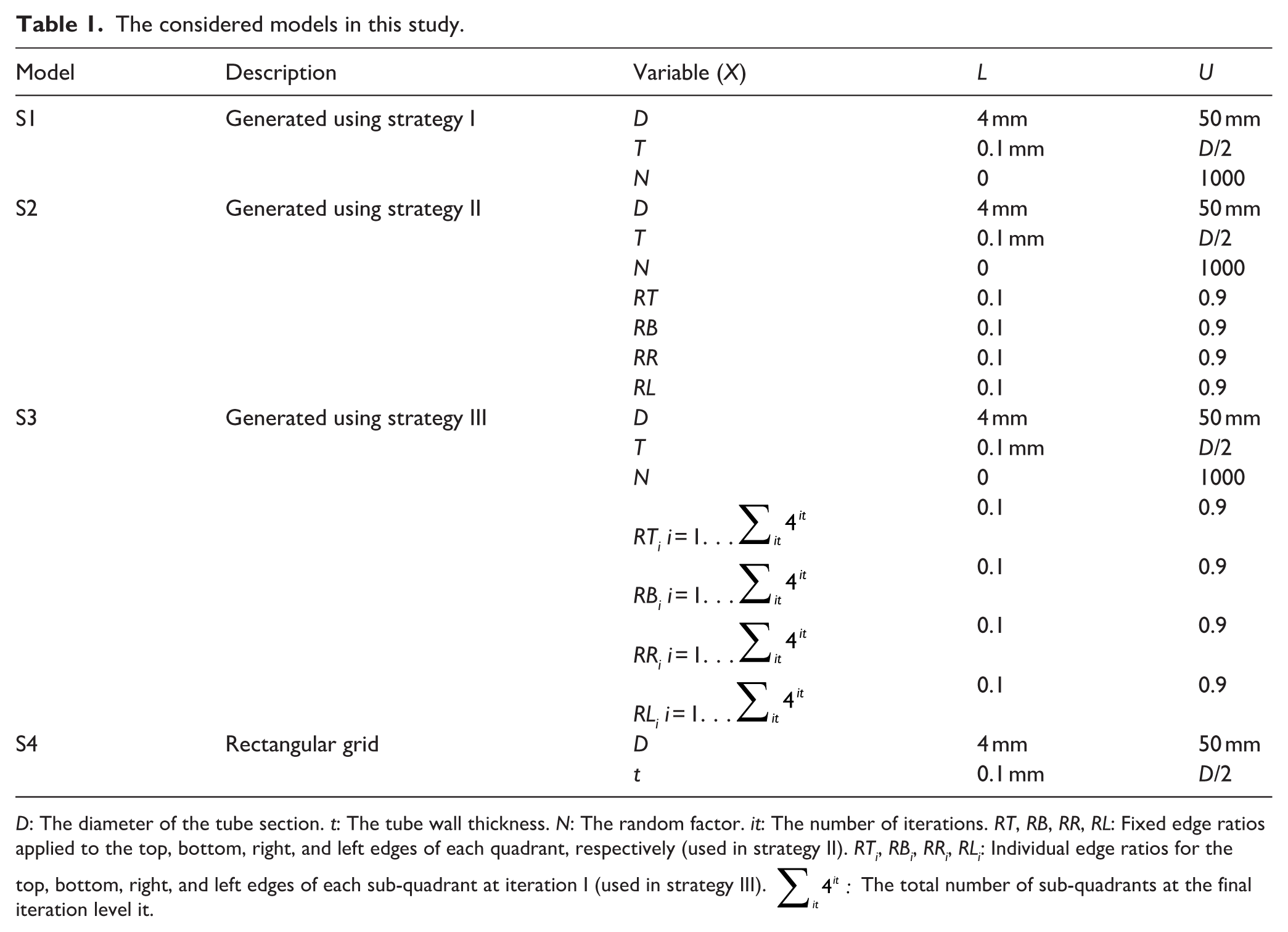
D: The diameter of the tube section. t: The tube wall thickness. N: The random factor. it: The number of iterations. RT, RB, RR, RL: Fixed edge ratios applied to the top, bottom, right, and left edges of each quadrant, respectively (used in strategy II). RTi, RBi, RRi, RLi: Individual edge ratios for the top, bottom, right, and left edges of each sub-quadrant at iteration I (used in strategy III).
Fractal grids are generated using a Python-scripted algorithm that implements the subdivision strategies described earlier. This algorithm provides accurate control over fractal parameters and ensures the reproducibility of the patterns. A complete parametric modeling workflow has been developed through Grasshopper, which allows for interactive manipulation of key variables and perfect integration with structural design tools like the Karamba3D plugin. The parametric modeling leads to rapid exploration of design variations, which are classified into two main categories of geometric and structural characteristics. The first one includes edge point ratios and random factors, and the diameter and thickness of structural members are considered as the second category. To ensure reproducibility of the stochastic pattern, randomness was constrained using a constant Seed in Grasshopper, which generates fixed random values and preserves them across different runs. The corresponding variables of each model are presented in Table 1.
The structural elements are assumed to be composed of steel hollow circular tube sections. A steel material of grade S235 is used for all members, characterized by an elastic modulus of 210 GPa and a yield strength of 235 MPa. During the modeling process, each line segment is considered as a beam element, and the duplicated lines are removed. The line-to-line connections are also considered as a node, and the duplicated nodes are also removed. The connections between elements in node locations are considered as rigid, representing moment-resisting connection behavior. Additionally, four rigid supports are assigned at the corner points of the structural models to simulate fixed boundary conditions.
Dead and snow loads, which are the most typical gravity loads for grid-shell structures, are considered in the analyses. The dead loads of the structural elements are automatically calculated by the software based on the assigned material properties and cross-sectional dimensions. In addition, a uniform snow load of 1.5 kN/m² is applied to the surfaces. To capture different loading conditions, both symmetric and asymmetric snow load distributions, each combined with the dead load, were defined as two distinct loading scenarios for evaluating the structural response.
In the software environment, these surface loads were defined through the Loads component in Karamba3D. The corresponding nodal loads were automatically computed based on the tributary area of each node. To ensure accurate distribution, the load type was specified as a mesh load within the component. Finally, the applied loads were multiplied by the appropriate load combination factors recommended in design codes 35 to generate the factored load cases.
Optimization process
In general, an optimization problem aims to identify the best solution among all feasible candidates. This is typically achieved by minimizing one or more objective functions, f(x), subject to a set of constraints, as defined in equation (5).
minimize f(x)
Subject to
where g(x) and h(x) represent inequality and equality constraints, respectively, and Lk and Uk denote the lower and upper bounds of the design variables.
The structural optimization was carried out using both single-objective and multi-objective strategies within the Octopus plugin in Grasshopper. Octopus employs a genetic evolutionary algorithm and allows seamless integration with parametric modeling and enables exploration of a wide design space.
In the single-objective optimization approach, the objective is to minimize the total structural mass, thereby promoting material efficiency and sustainability. A serviceability constraint was imposed by limiting the maximum vertical deflection (

For the multi-objective optimization strategy, two objective functions of the structural mass and the maximum vertical deflection are considered simultaneously, enabling a more balanced design by considering both material usage and structural performance. The Pareto front resulting from this process provides a set of optimal solutions offering trade-offs between the two objectives, allowing designers to choose configurations based on project-specific priorities.
In both single-objective and multi-objective optimization strategies, design variables are restricted by boundary conditions (equation (5)), with ranges reported in Table 1.
In addition to the serviceability constraint, global and local stability checks are included. Global buckling modes are evaluated by the software under the applied load combinations. Local buckling is assessed using code-based criteria for thin-walled steel sections, 36 expressed as:

where D is the diameter of the tube, t is the wall thickness, E represents the elastic modulus, and Fy denotes the yield strength of the steel material used.
The final constraint applied in the structural design is to ensure that the demand-to-capacity ratio of each structural member remains below 0.9, which guarantees the proper performance of all members under the imposed load combinations. 36
For the optimization process, a population size of 150 is used, and the algorithm is allowed to run up to 70 generations, which serves as the termination criterion. Convergence was assessed by monitoring the stabilization of the outputs. The optimization process is repeated 50 times for each case in order to increase the reliability of the results and identify the best possible solution.
Results and discussion
To evaluate the structural performance of the proposed fractal grid-shell structures using the subdivision method, both single and multi-objective optimization processes were carried out. The optimization procedures aimed to minimize structural mass while maintaining adequate structural performance under various loading scenarios. The use of a single objective optimization process allows for obtaining the least possible structural mass within the allowable maximum deformation, while the multi-objective optimization provides effective information about the structural mass for different values of maximum deflection. This approach provides a comprehensive comparison between conventional square grid-shell structures and those generated by fractal subdivision strategies in terms of structural efficiency, adaptability, and potential material savings.
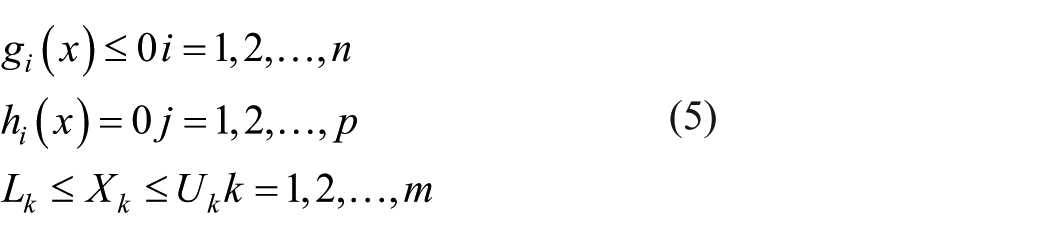
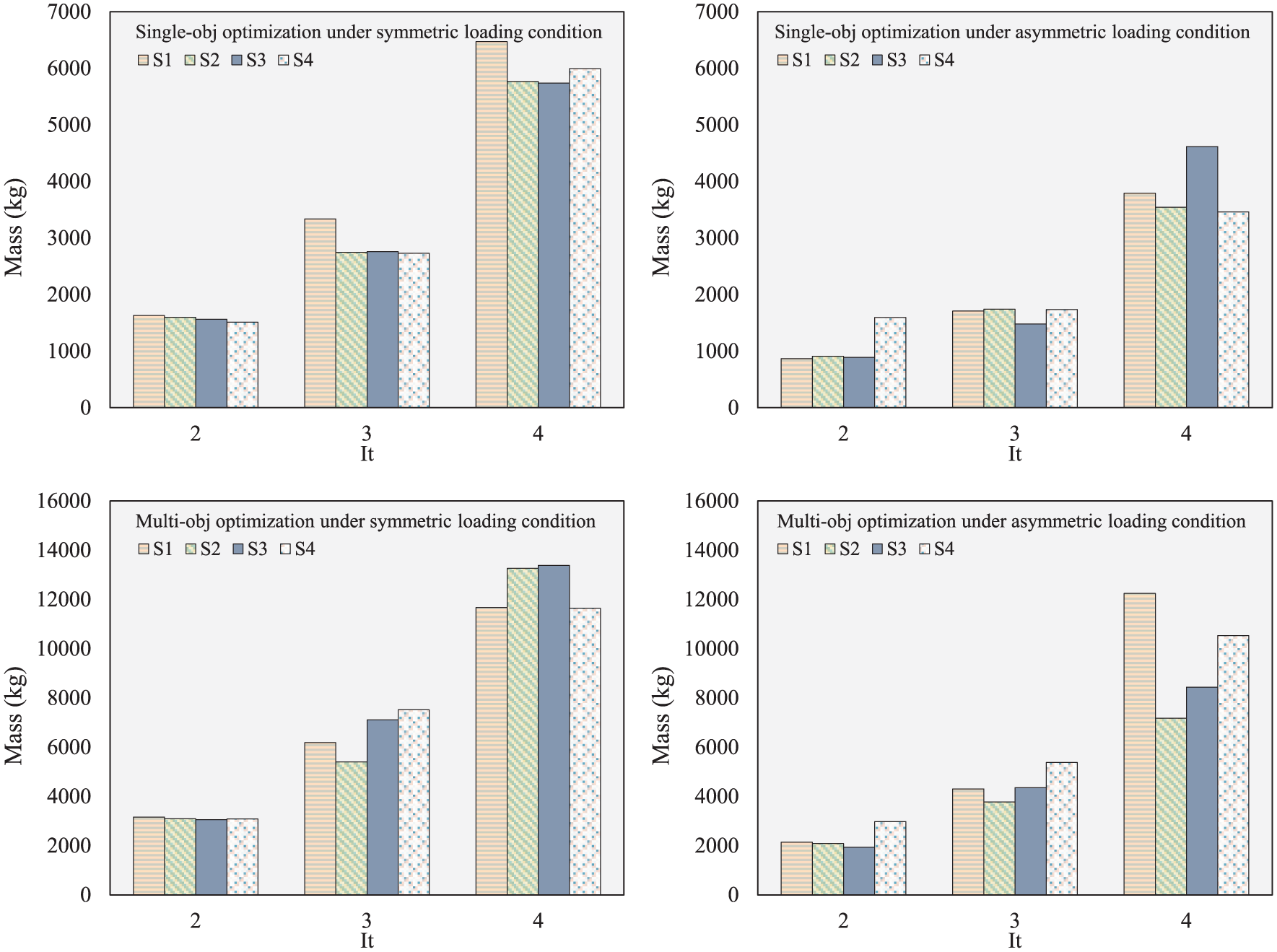
Figure 6 compares the total structural mass at the final stage of the optimization process for the cases with spherical surfaces. The results indicate that the overall structural mass increases with the number of fractal iterations, primarily because higher iterations generate a greater total length of structural elements. It should be noted that the desirable structural form is influenced by factors beyond mass efficiency, including the final geometric configuration and the required element sizes. Therefore, models with different iteration levels are analyzed separately to evaluate their structural responses and to determine the optimal solution in each case. This approach enables designers to select the most appropriate configuration based on a balance between structural efficiency, material use, and aesthetic or construction considerations.
Structural mass at the final stage of the optimization process for the cases with spherical surfaces.
It can also be observed that the structural models generated using the first strategy (S1) and the conventional square grids (S4) exhibit the highest overall structural mass. This is due to the geometric restrictions inherent in these models, which limit the ability of the optimization algorithm to effectively reduce structural mass. However, in the multi-objective optimization results, S1 models demonstrate a better balance between the design goals, providing improved performance compared to S4 models. The second strategy (S2) also shows competitive performance in terms of structural mass across different numbers of iterations when compared to conventional square grid structures. The most material-efficient designs, however, are associated with the S3 models. This is because S3 allows continuous adjustment of the grid topology, enabling the optimization process to account for mechanical constraints more effectively. This flexibility has a more pronounced impact under asymmetric loading conditions, where force and stress distributions are non-uniform, as the grid can detect critical regions and reinforce them accordingly. In contrast, under symmetric loading conditions, the approximately uniform force distribution requires fewer topological adjustments, diminishing the superiority of S3 models relative to the other strategies.
According to the results, the normalized structural mass of S3 models with respect to the corresponding values for conventional square grid structures obtained from the single-objective optimization process under symmetric loads is about 0.72, 0.88, and 0.94 for the number of iterations of 2, 3, and 4, respectively. The desirable performance is also obtained considering the asymmetric loading condition with the ratios of 0.75, 0.80, and 0.79, respectively, indicating robust performance. The obtained values for multi-objective optimization in Figure 6 are based on the simultaneous minimization of both maximum deflection and structural mass. The great performance of S3 models in terms of material efficiency is again highlighted with normalized structural mass values of 0.61, 0.85, and 0.95 for the number of iterations of 2, 3, and 4 under symmetric loads, and 0.49, 0.52, and 0.60 under asymmetric loads, respectively. These findings highlight the effectiveness of strategy III in achieving optimized, lightweight structural systems even when subjected to complex loading conditions.
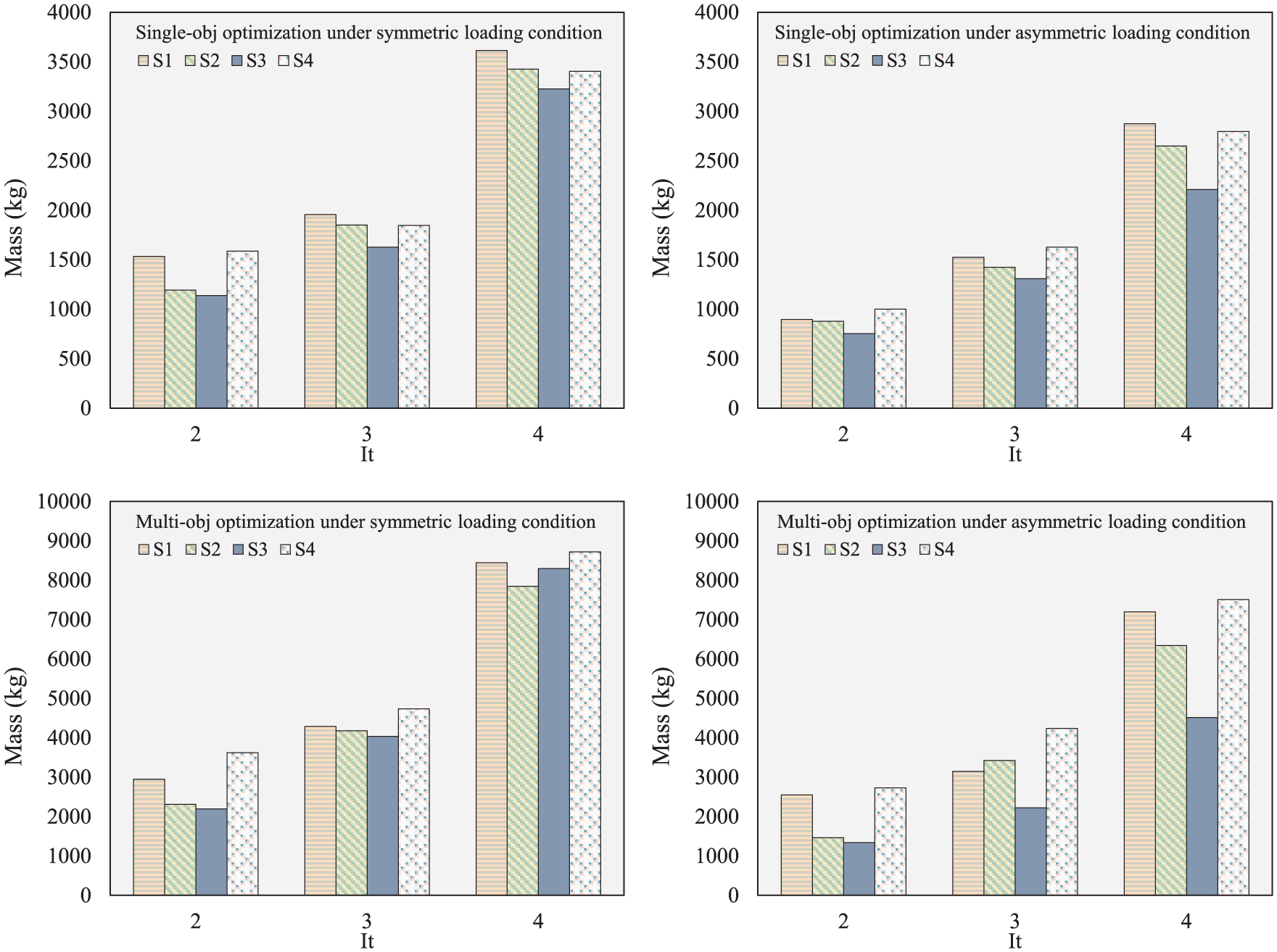
A similar finding is also observed in the results of Figure 7, where the overall structural mass at the final stage of the optimization process for the cases with hyperboloid surfaces is compared. The superiority of strategy three in achieving optimized, lightweight structural systems is again confirmed. The normalized structural mass with respect to the corresponding values for conventional square grid structures obtained from the single-objective optimization process under symmetric loads is about 0.92, 0.95, and 0.95 for the number of iterations of 2, 3, and 4, respectively, and they are obtained in about 0.85, 0.77, and 0.96, respectively, for asymmetric loading condition. The corresponding normalized mass results under symmetric loading of multi-objective optimization are about 0.79, 0.53, and 0.61, respectively, and they are 0.46, 0.52, and 0.67, respectively, in cases of asymmetric loading conditions. The other fractal-based structures also exhibit acceptance performance under different loading conditions. According to the results of Figures 6 and 7, the effectiveness of fractal patterns in the models with spherical surfaces is more than the corresponding models with hyperboloid surfaces. This outcome stems from the geometric characteristics of hyperboloid surfaces, where the variable-radius geometry provides a more uniform load distribution across the structure. Consequently, the influence of topology on structural performance optimization is diminished, and no substantial differences are observed among the generation strategies. Moreover, unlike the spherical models, the S2 models on hyperboloid surfaces lose their relative advantage, with their structural mass reported to be nearly equivalent to that of the S1 and S4 models. This can be attributed to the geometric complexities and the varying radius of hyperboloid surfaces, where maintaining fixed subdivision ratios at each iteration (as applied in the S2 models) may not be suitable.
Structural mass at the final stage of the optimization process for the cases with hyperboloid surfaces.
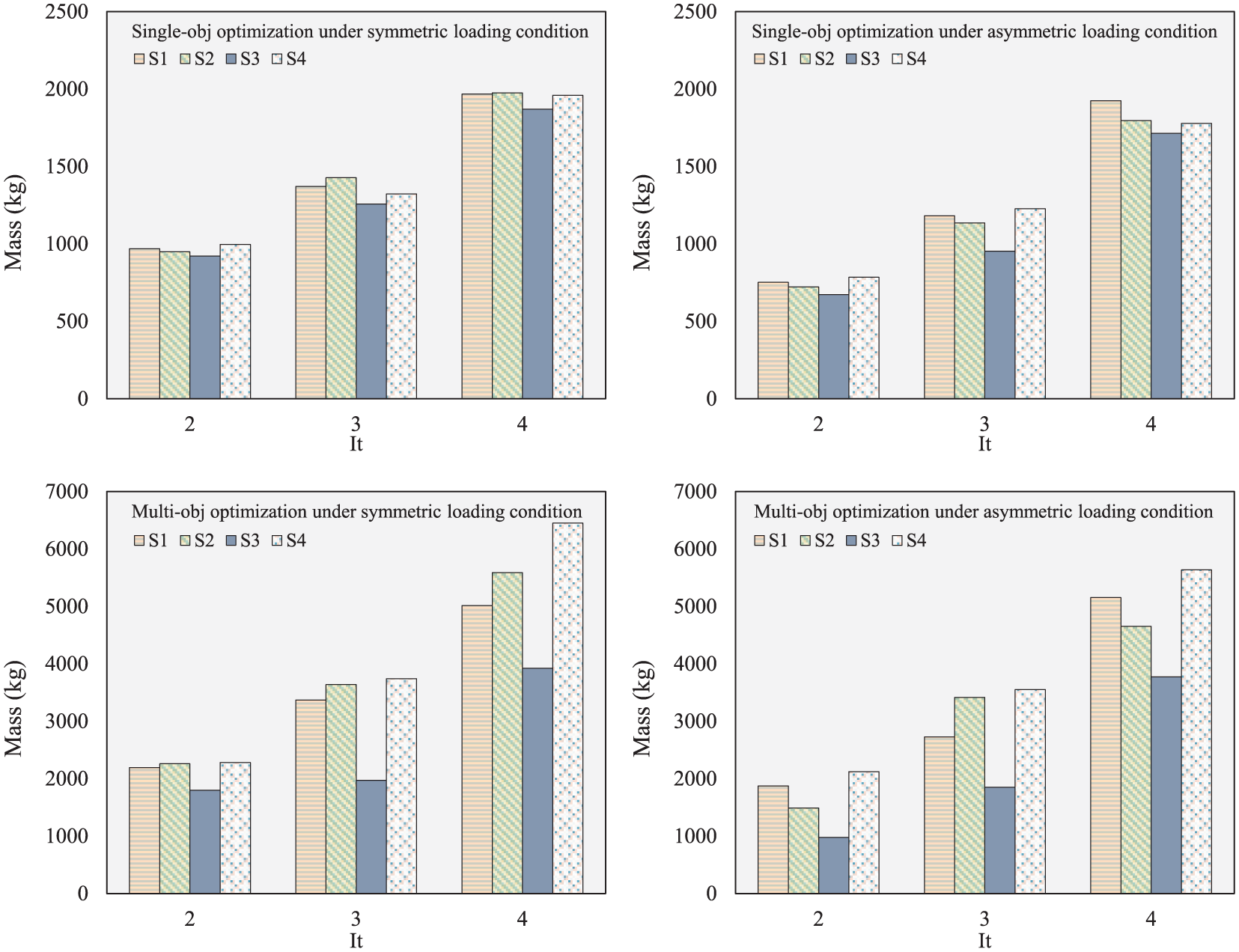
Figure 8 shows the comparison of structural mass at the final stage of the optimization process for cases involving hyperbolic surfaces. Unlike the previous models, the fractal patterns demonstrate better performance only under asymmetric loading conditions, often in a lower number of iterations. Under symmetric loads, however, their performance is nearly identical.
Structural mass at the final stage of the optimization process for the cases with hyperbolic surfaces.
The geometric complexities of these surfaces have made topology optimization more challenging and have reduced the stability and efficiency of fractal models under symmetric loading.
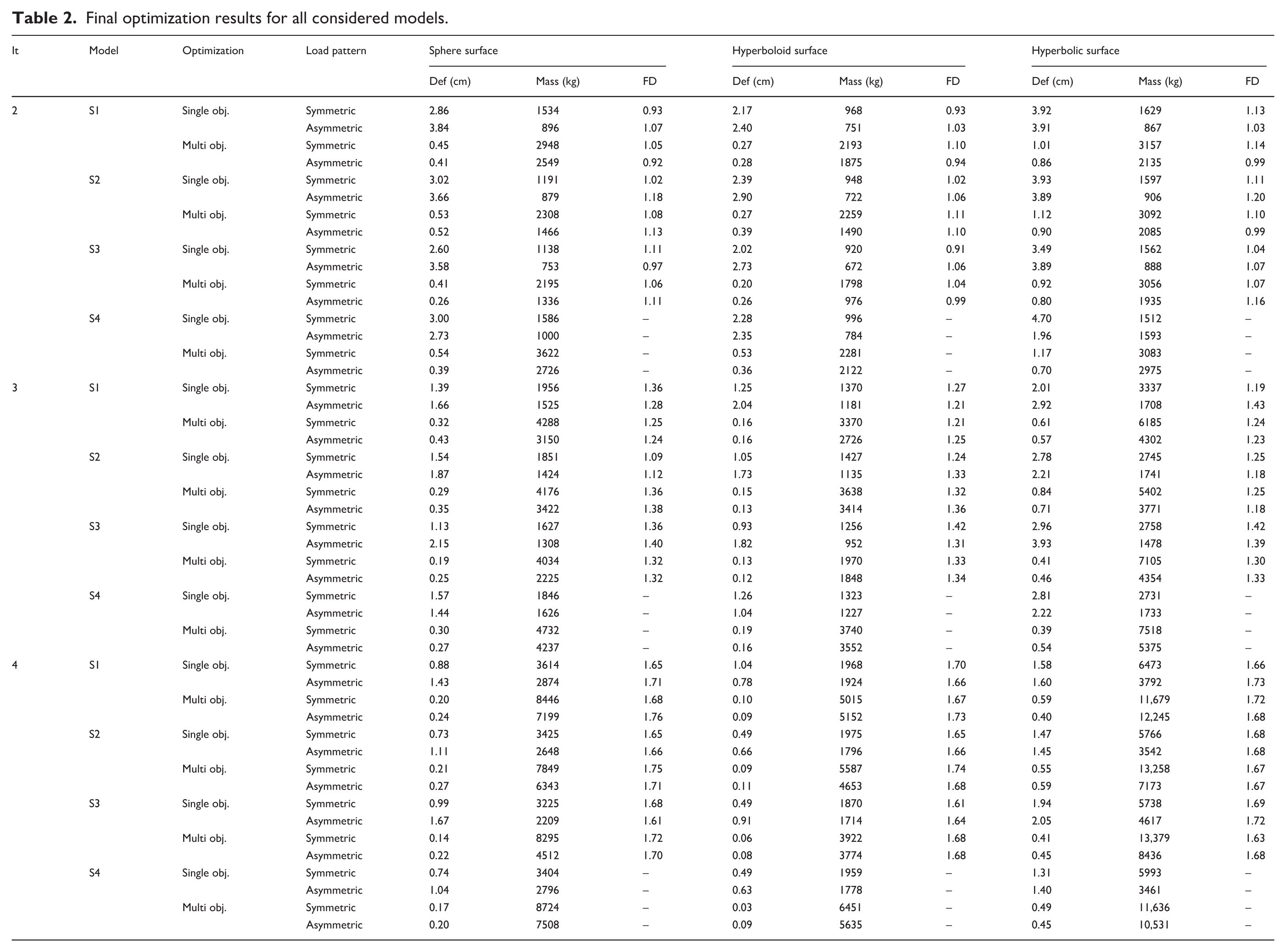
The optimum values of maximum deflection and structural mass for all models, along with the corresponding detailed results obtained from the single-objective and multi-objective optimization approaches, are reported in Table 2. As shown, the maximum deflection decreases with increasing iteration number. Moreover, the fractal dimension of the models increases as the number of iterations rises, indicating the enhanced geometric complexity of the structures.
Final optimization results for all considered models.
To evaluate the robustness of the optimization process, the mean values and standard deviations were computed based on 50 independent runs for each model and are presented in Table 3. The results show that the mean values closely match the best solutions, and the associated standard deviations are low. This demonstrates the consistency and reliability of the genetic algorithm in identifying the optimum solution for the considered problem.
The mean and standard deviation results for all considered models.
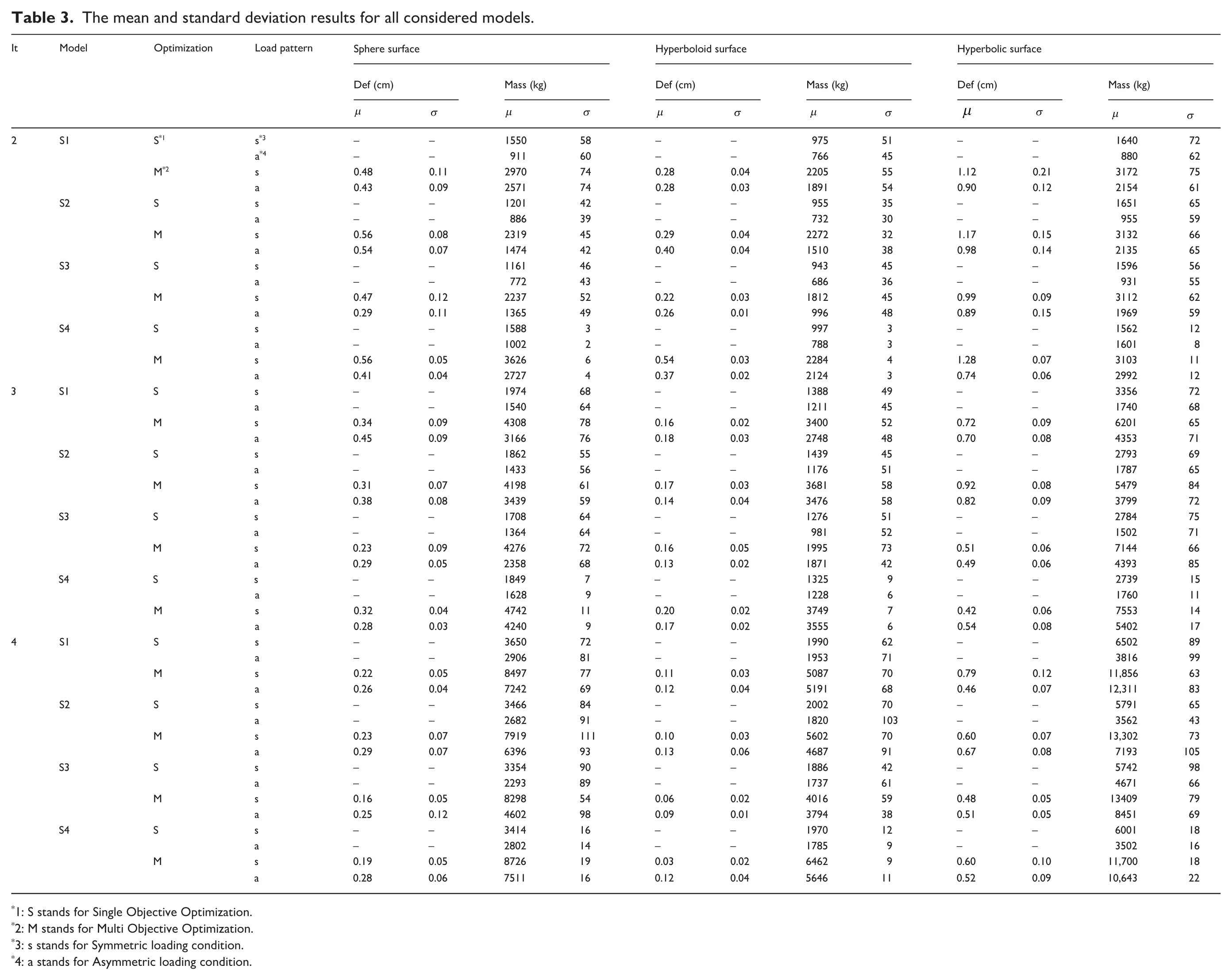
1: S stands for Single Objective Optimization.
2: M stands for Multi Objective Optimization.
3: s stands for Symmetric loading condition.
4: a stands for Asymmetric loading condition.
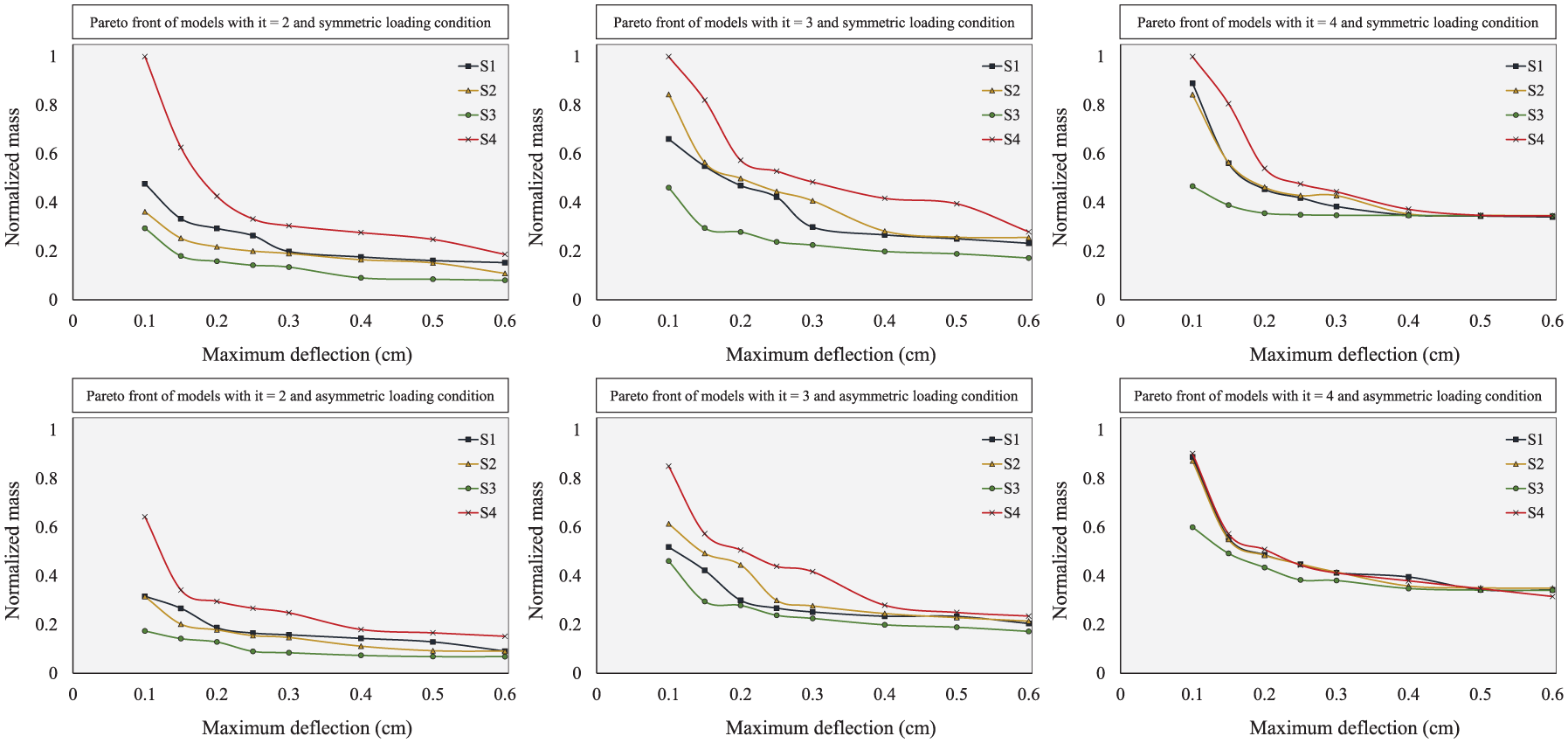
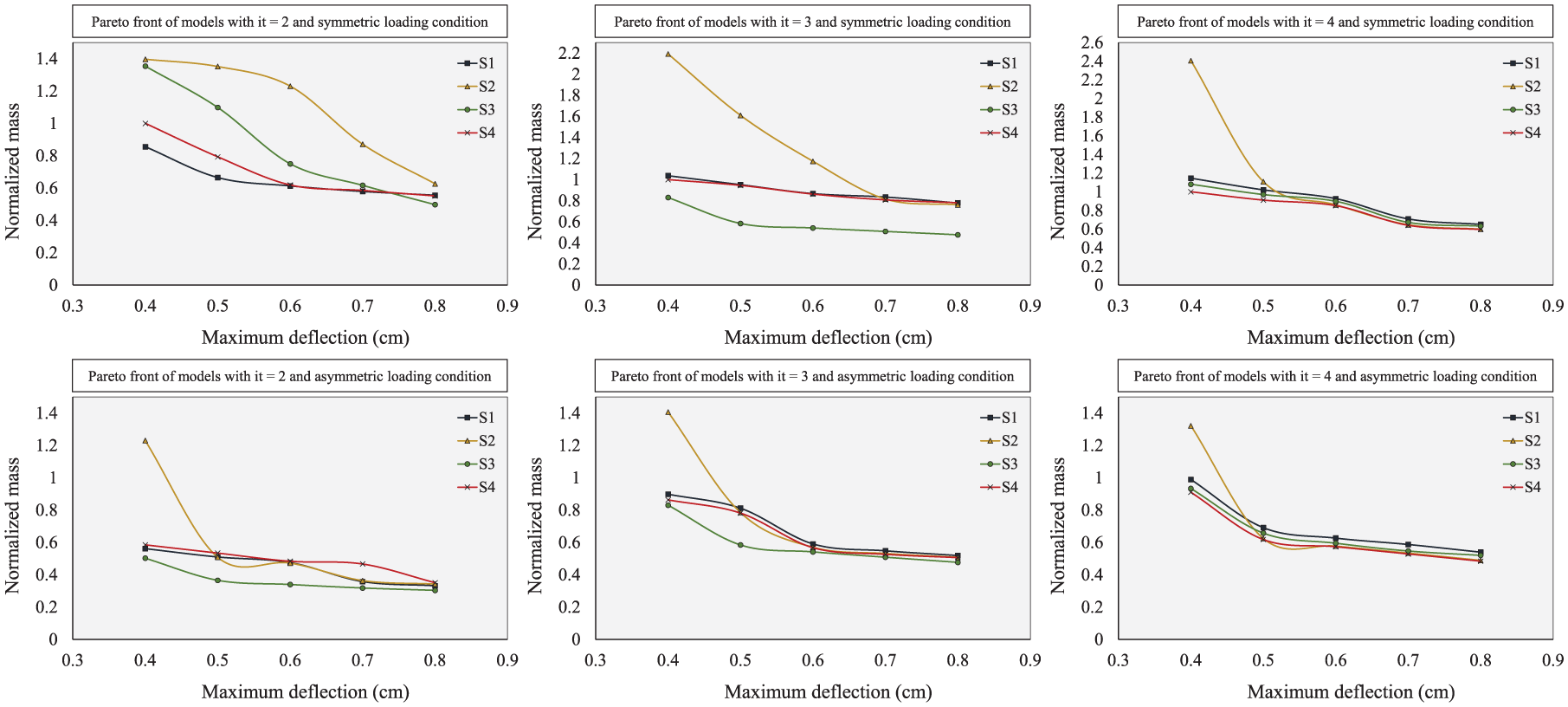
Figures 9–11 shows the optimal results obtained from the Pareto fronts of the multi-objective optimization runs for sphere, hyperboloid, and hyperbolic surfaces. Here, we compare the total structural mass of the models across various levels of maximum deflection, ranging from 0.1 to 0.6 cm for the sphere and hyperboloid cases, and from 0.4 to 0.8 cm for the hyperbolic cases. The adjusted deflection interval for the hyperbolic models is due to their tendency to exhibit higher deflections compared to the others. Since the multi-objective optimization approach targets both mass and deflection simultaneously, it does not produce results with higher deflection values. Those are instead covered through the single-objective optimization, as discussed earlier in Figures 6–8.
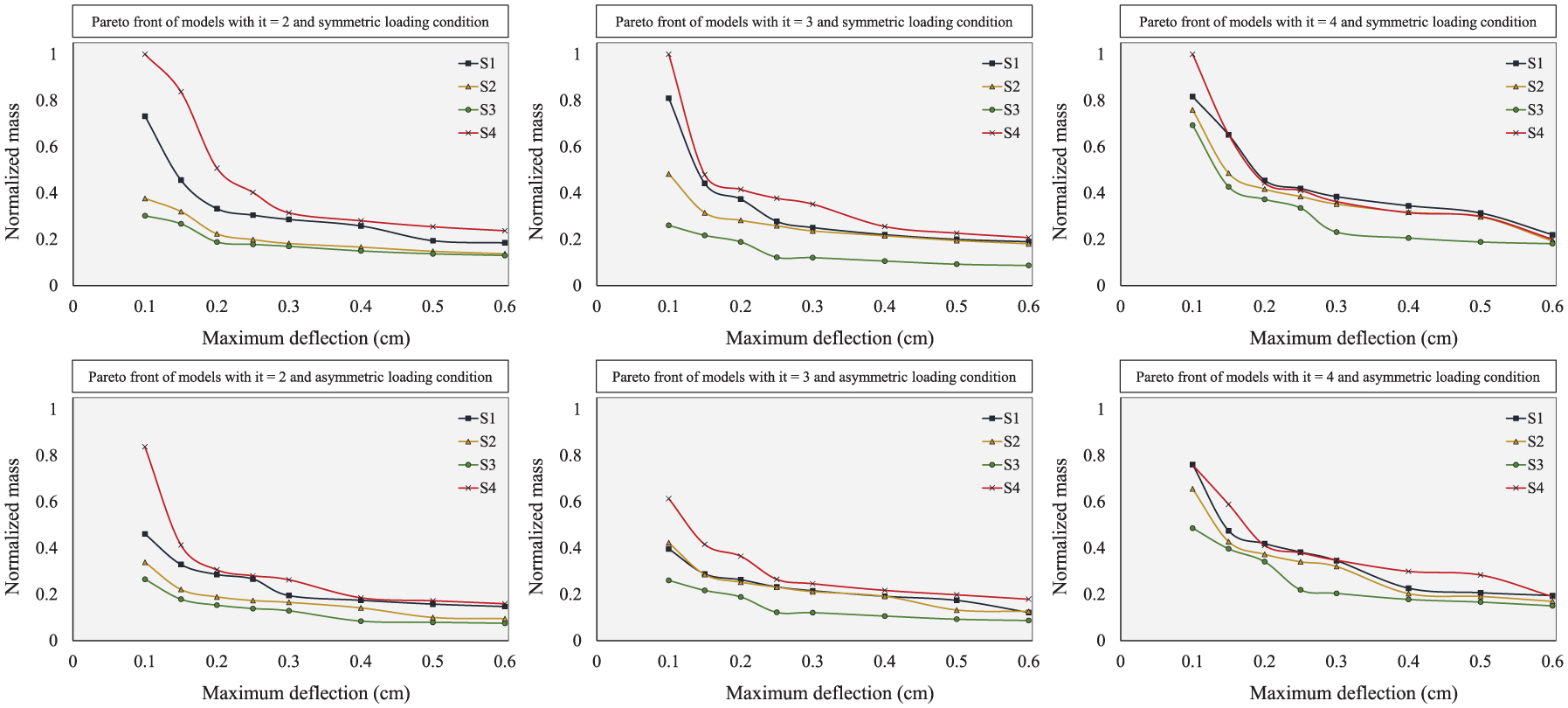
Optimal results obtained from the Pareto fronts of the multi-objective optimization runs for the cases with spherical surfaces.
Optimal results obtained from the Pareto fronts of the multi-objective optimization runs for the cases with hyperboloid surfaces.
Optimal results obtained from the Pareto fronts of the multi-objective optimization runs for the cases with hyperbolic surfaces.
A general trend can be observed in the results of Figures 9–11: as the maximum deflection increases, the total structural mass decreases, although the rate of reduction diminishes with larger deflections. Consequently, the difference in structural mass between fractal models and conventional square grids becomes considerably smaller. In other words, when high stiffness is required, the fractal models (S1, S2, and S3) demonstrate greater efficiency because of their ability to flexibly adapt topology. However, as the displacement increases, the role of topology becomes less significant, and the advantages of fractal models are reduced. This can also be observed by comparing the results of single and multi-objective optimizations in Figures 6 and 7, where, due to the targeting of higher deflections in a single-objective process, the effect of fractal patterns is smaller than the corresponding result of models optimized with a multi-objective process.
Looking at the results of spherical and hyperboloid cases, it is clear that the models generated using fractal subdivisions consistently have a lower structural mass compared to standard square grid systems, whereas on hyperbolic surfaces, the fractal models reduce mass only under certain design conditions.
Comparing the obtained results reveals that although the S3 models yield superior performance in terms of deflection and mass in all models of spherical and hyperboloid surfaces and some models of hyperbolic surface, they also require significantly high computational time and complicate the design procedure due to the larger number of variables. Therefore, depending on the loading conditions and the chosen optimization strategy, simplified models such as S1 or S2 with a lower number of variables may be preferred. According to the results of Table 2, the differences in performance among these models are marginal in some specific scenarios. Thus, S1 and S2 models can be alternatively used instead of S3 when computational efficiency or reduced design complexity is prioritized.
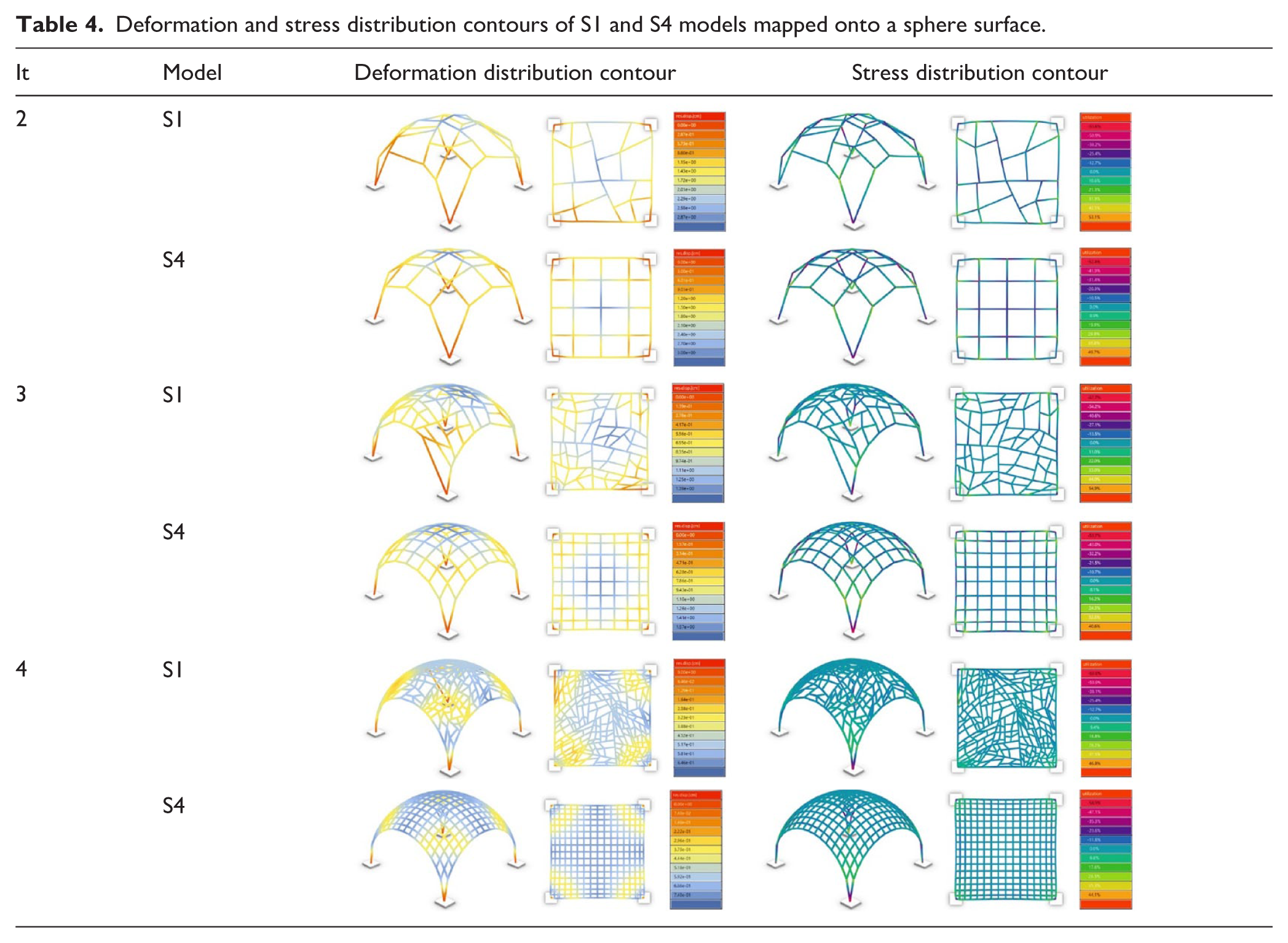
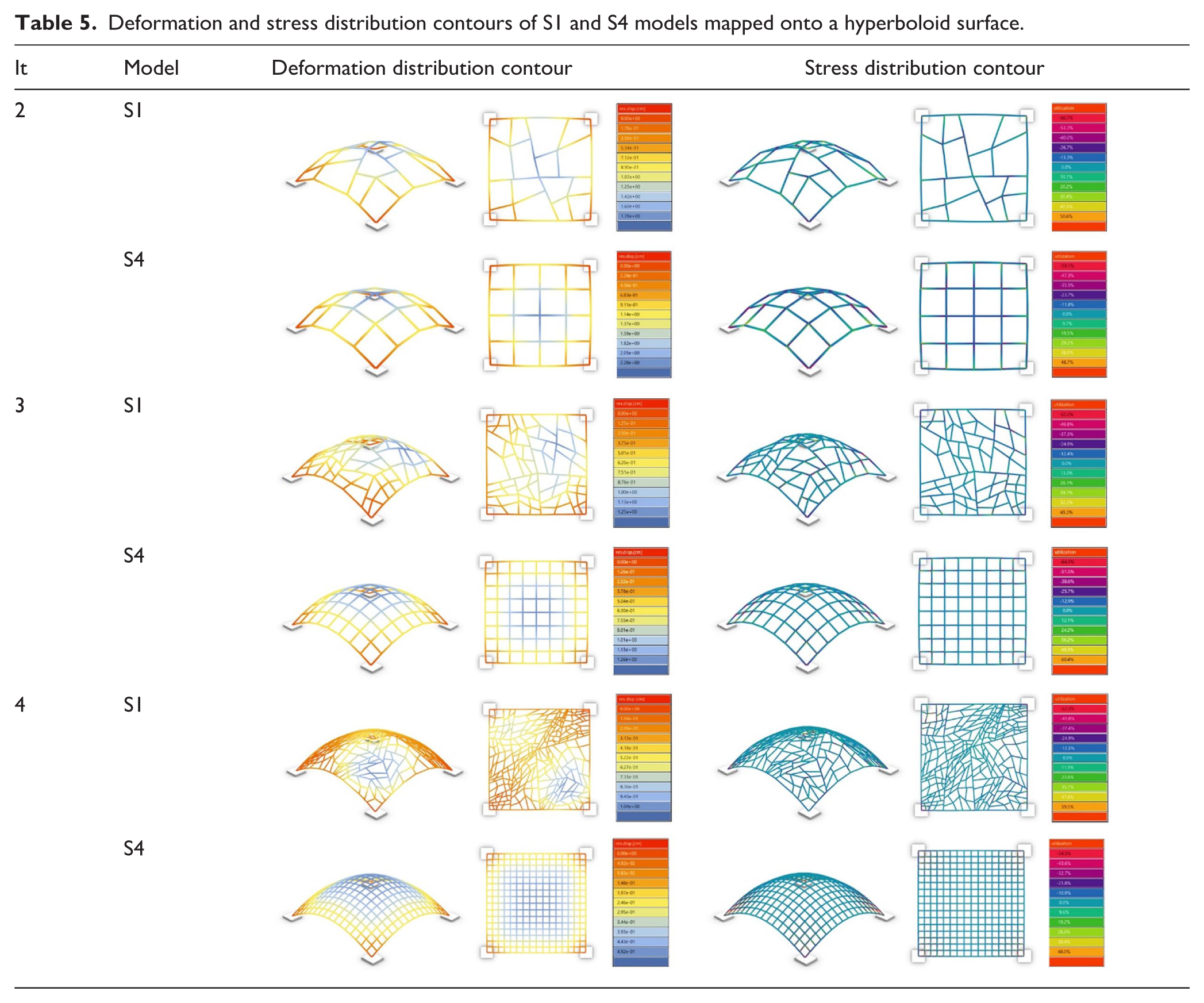
The comparison of deflection and stress distribution contours for the S1 and S4 models under symmetric loading conditions at different iterations in the final stage of the single-objective optimization process is presented in Tables 4 and 5, corresponding to the spherical and hyperboloid surface cases, respectively. According to the results, deflections in the conventional grid-shell structures (S4 models) are distributed uniformly, while the distribution is not uniform in the fractal-based structures (S1 models). This difference arises from the random placement of elements in fractal-based structures, resulting in a non-uniform distribution of surface loads. It is also observed that the maximum deformation is lower in fractal-based structures compared to the conventional ones. This is attributed to the ability of fractal-based structures to increase the density of elements in critical zones, thereby enhancing the performance in terms of deflection resistance. What is more, in both structural types, the maximum deflection decreases with an increasing number of iterations. This is also due to the increase in the number of structural elements in critical regions, which provide greater resistance against deflection.
Deformation and stress distribution contours of S1 and S4 models mapped onto a sphere surface.
Deformation and stress distribution contours of S1 and S4 models mapped onto a hyperboloid surface.
A comparison of the stress distributions in the S1 and S4 models reveals that the maximum stress is concentrated in the corner elements and gradually reduces toward the central zones. This causes the material in central zones to remain largely underutilized. However, fractal-based structures exhibit a more efficient arrangement of elements with higher element densities in zones having greater stress and a reduced number of elements in less critical areas. Therefore, the distribution patterns of elements lead to more optimal material usage and a reduction in overall structural mass.
The deflection distribution of conventional grid-shell structures in both sphere and hyperboloid surfaces is almost the same. However, the maximum deflection shifts toward the corners in the case of fractal-based structures applied to hyperboloid surfaces. It is also seen that hyperboloid surface models generally exhibit lower deflections compared to their spherical counterparts.
Table 6 presents the comparison of deflection and stress distribution contours for the S1 and S4 models under symmetric loading conditions at different iterations during the final stage of the single-objective optimization process for the hyperbolic surface case. In contrast to the previous results, the fractal-based structures (S1 models) exhibit a more uniform deflection distribution. This uniformity arises because stress concentrations occur primarily in the central zone of the surface, resulting in higher deflection in that area. Consequently, the density of elements in the fractal structures increases in these central zones. As a result, similar to previous cases, the maximum deformation in fractal-based structures is lower than that in conventional models. Additionally, the maximum deflection decreases with an increasing number of iterations, reflecting improved resistance due to the higher element density.
Deformation and stress distribution contours of S1 and S4 models mapped onto a hyperbolic surface.
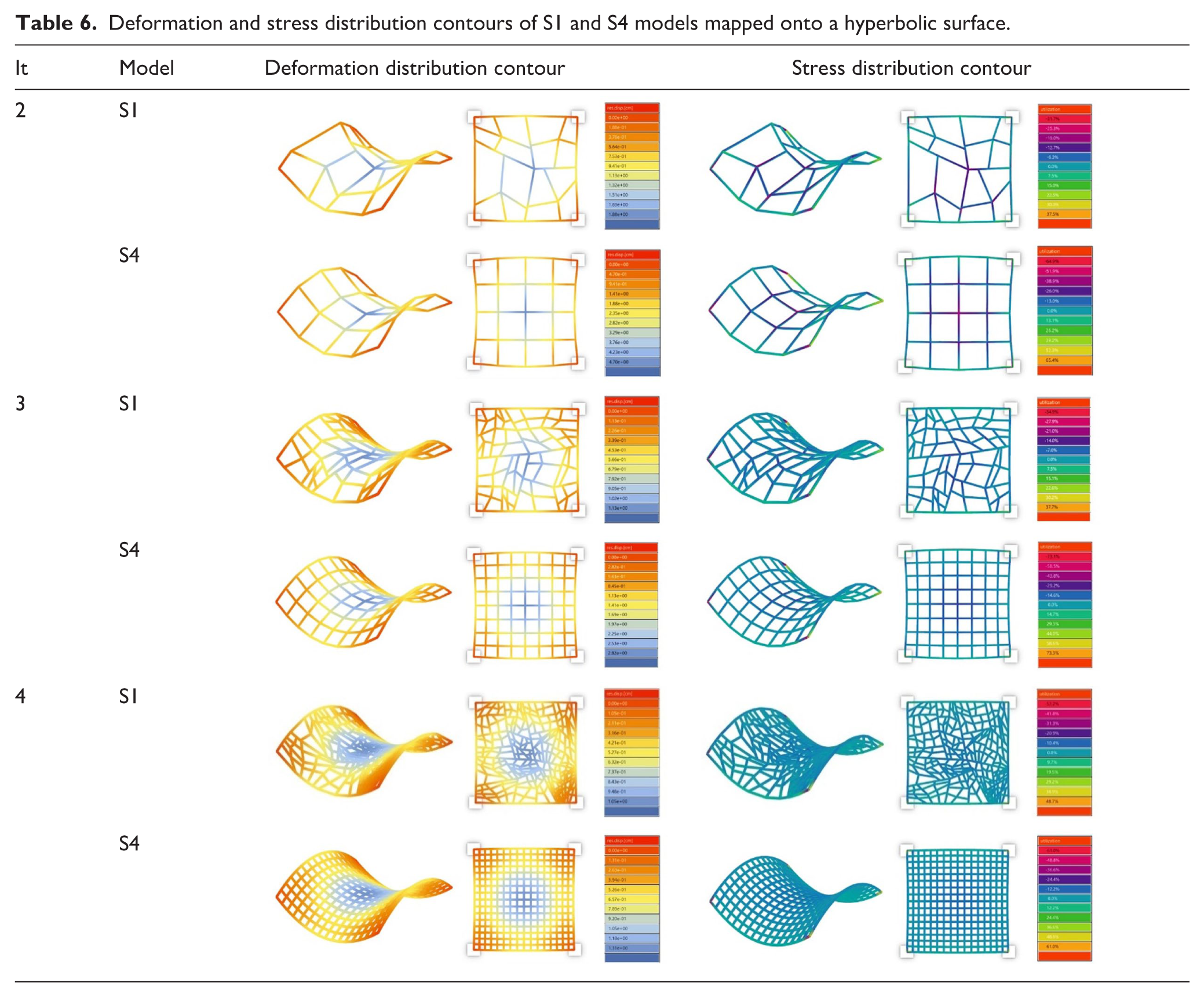
Comparing the stress distributions of the S1 models on hyperbolic surfaces with those based on spherical and hyperboloid surfaces reveals distinct stress concentration patterns. In the hyperbolic models, stress concentrations are primarily located in the central zones, whereas in the spherical and hyperboloid models, they are concentrated near the corners. Furthermore, the axial stress differs significantly, as it is predominantly tensile in the hyperbolic models and compressive in the spherical and hyperboloid models. This difference in axial loading conditions is a key factor behind the reduced effectiveness of fractal patterns in enhancing structural performance on hyperbolic surfaces.
As already observed from the obtained results, fractal patterns are able to improve structural behavior by increasing the density of elements in critical regions, which enhances the load-carrying capacity and stability of the structure. In the spherical and hyperboloid models, where axial stresses are mainly compressive, the additional elements help resist compressive forces and prevent buckling, thereby reducing the overall structural mass by utilizing smaller sections for structural elements. However, in the hyperbolic models, the axial forces are primarily tensile, and since tensile members are less susceptible to buckling, increasing the density of elements does not significantly improve axial capacity. Instead, the added elements mainly contribute to reducing deflection without enhancing stability.
Therefore, the efficiency of fractal patterns is more highlighted in structures where compressive stresses dominate, such as on surfaces with positive Gaussian curvature (e.g., spheres and hyperboloids). In contrast, for negatively curved surfaces like hyperbolic models, where tensile stresses prevail, the benefits of fractal densification are limited to stiffness improvements rather than increased buckling resistance.
In general, the choice of the number of iterations depends on multiple factors, including the target structural mass, allowable deflection, aesthetic preferences, and architectural requirements. Apart from these parameters, the total number of elements and their individual lengths also play a critical role, particularly during the construction phase. As the iteration number increases, the total number of elements grows proportionally, which can extend installation time. However, the reduced element length at higher iterations can simplify handling and assembly. Figure 12 illustrates the distribution of element lengths across different iteration numbers for the S1 models. As shown, increasing the iteration number decreases the element lengths to sizes which can be carried by a single worker.
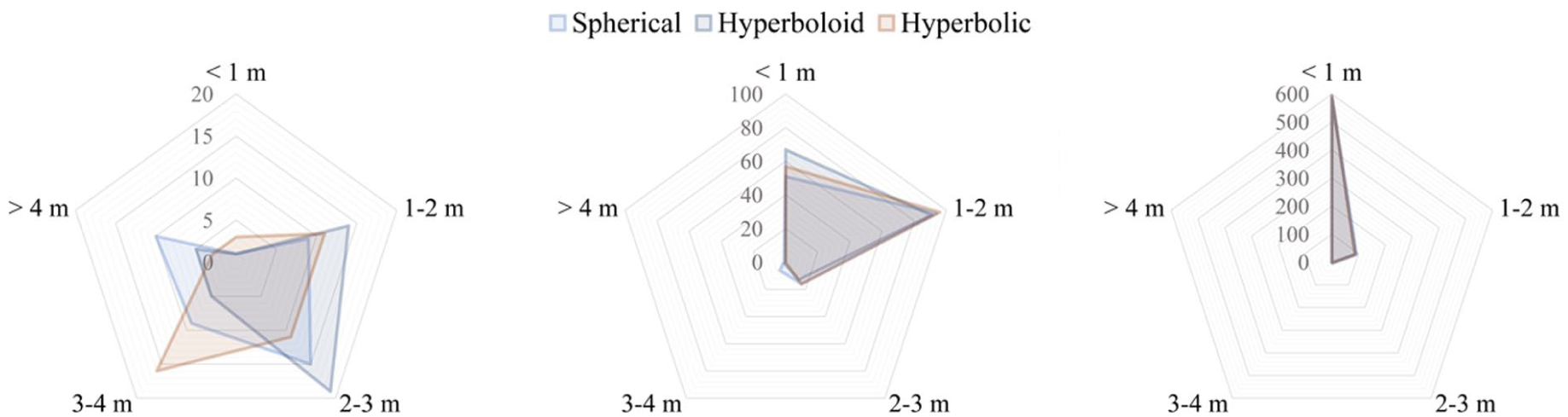
Element size classification for S1 models with different surfaces in: (a) it = 2, (b) it = 3, and (c) it = 4.
Conclusions
The current paper evaluates the structural performance of fractal-based grid-shell structures with respect to two key criteria of structural mass and maximum deflection. The considered fractal patterns are generated through various strategies to investigate how differences in randomness affect structural performance. A conventional square grid-shell structure, ribbed dome, is also included as a benchmark for comparison. Three different target surfaces, each with distinct characteristics, featuring either constant or variable radius in different directions and exhibiting positive or negative Gaussian curvature, are used to map planar grid patterns in order to evaluate their effects on fractal structures. In the end, both single and multi-objective optimizations are applied to the models to achieve identical conditions for comparison purposes. The main results obtained are summarized as follows:
Fully controlled approach (Strategy III) proved most effective in achieving optimized, lightweight structural systems, particularly on surfaces with positive Gaussian curvature, specifically under asymmetric loading conditions.
Fractal-based models demonstrated greater efficiency under asymmetric loading by efficient material use through element redistribution toward critical stress zones. Under symmetric loading, the benefits were noticeable only at lower iterations.
Compared with conventional grid systems, fractal-based structures exhibited lower structural mass according to the multi-objective optimization approach. However, the difference between the overall mass of models diminishes at higher deflections.
Spherical (positive Gaussian curvature) surfaces benefited most from fractal geometries, with notable improvements in buckling resistance and deflections. In contrast, on negative Gaussian curvature surfaces, the benefits were limited to stiffness enhancements.
Differences among the three fractal generation strategies were generally marginal in some conditions, suggesting they can be selected interchangeably when design simplicity or computational efficiency is prioritized.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.