
Abstract
Despite much research demonstrating infants’ abilities to attribute goals to others’ actions, it is unclear whether infants can generate on-line predictions about action outcomes, an ability crucial for the human propensity to cooperate and collaborate with others. This lack of evidence is mainly due to methodological limitations restricting the interpretation of behavioral data. Here, we exploited the fact that observers’ motor systems are recruited during the observation of goal-directed actions. We presented 9-month-old infants with part of an action. For this action to be interpreted as goal directed, the infants would need to predict an outcome for the action. Measuring the attenuation of the sensorimotor alpha signal during observation of action, we found that infants exhibited evidence of motor activation only if the observed action permitted them to infer a likely outcome. This result provides evidence for on-line goal prediction in infancy, and our method offers a new way to explore infants’ cognitive abilities.
The ability to attribute goals to observed actions is the cornerstone of people’s ability to interpret the movements that others make. Not only is structuring actions in terms of goals crucial for survival (Verfaille & Daems, 2002), it is also a prerequisite for social learning, the primary route through which human infants acquire the cultural practices of their conspecifics (Csibra & Gergely, 2007).
In a number of paradigms, researchers have demonstrated that infants, from around 6 months or earlier, do interpret actions in terms of goals (Csibra, 2008; Kamewari, Kato, Kanda, Ishiguro, & Hiraki, 2005; Southgate, Johnson, & Csibra, 2008; Woodward, 1999). The majority of this research has shown that infants can recognize when action outcomes are incongruent with the means used to achieve them. For example, infants look longer toward an event in which an agent makes unnecessary rather than necessary detours to achieve an outcome (Csibra, 2008) or when an agent is seen grasping an object they had previously not been reaching for (Daum, Prinz, & Aschersleben, 2008). These studies demonstrate that infants can make retrospective judgments about the match between actions and outcomes.
However, whether infants can use their goal-attribution abilities to generate on-line predictions about outcomes of actions is less clear, and retrospective measures such as looking time cannot conclusively answer this question (Southgate & Csibra, 2009). The ability to generate predictions about how others’ actions will unfold is crucial for enabling one to prepare an appropriate action in response to an observed action (Csibra & Gergely, 2007; Prinz, 2006), allowing one to engage in cooperative and collaborative activities with others. Collaborative activities are likely to serve as a fundamental mechanism of social learning in young children (Tomasello, Carpenter, Call, Behne, & Moll, 2005).
By the end of the 1st year, infants do predict something about an action that they have repeatedly been viewing. Having seen a hand pick up an object and place it in a container, infants anticipate how the same action will unfold again, by making eye movements ahead of a moving hand (Falck-Ytter, Gredeback, & von Hofsten, 2006). However, it is unclear whether infants predict the outcome of the action or just a pathway that they have repeatedly viewed (Eshuis, Coventry, & Vulchanova, 2009).
To explore whether infants predict the outcome of an ongoing action, we designed a paradigm in which the outcome was invisible and needed to be inferred. Specifically, 9-month-old infants were presented with a grasping hand, which disappeared behind an occluder, composed of a small piece of foam board attached to a pole that could be raised and lowered (see Fig. 1a). To test whether infants could make a prediction about the occluded outcome of this action (i.e., that the hand was likely grasping for an object), we exploited the fact that humans activate their motor system selectively when they observe an action that can be interpreted as goal directed (Muthukumaraswamy, Johnson, & McNair, 2004). For this action to be interpreted as goal directed, infants needed to predict an outcome for the action. We reasoned that if we were able to measure activation of the motor system during this event, it would provide strong evidence that infants had predicted this outcome.
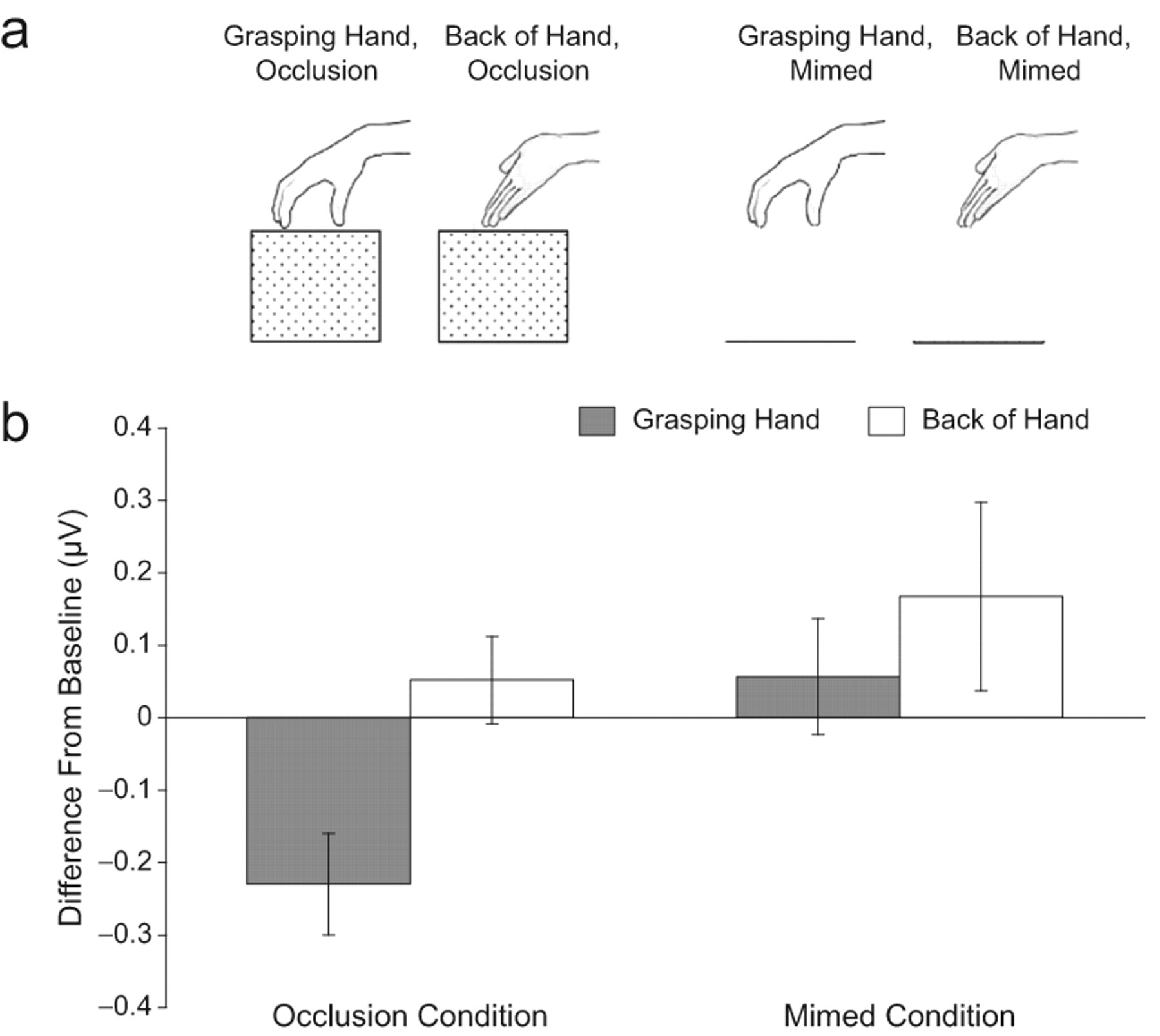
Illustration of the conditions and hand actions (a) and sensorimotor activity as a function of condition and hand action in the observation phase of the experiment (b). Infants saw either a grasping hand or the back of a hand, which either disappeared behind an occluder (occlusion condition) or came to rest on the front of a stage (mimed condition). Sensorimotor alpha amplitude was measured with electroencephalography, and the graph reflects activation in left-hemisphere channels (mean difference from baseline) during observation of the action. Data were averaged over all infants and over the 400-ms analysis windows. Error bars represent standard errors.
We included several controls, to ensure that motor activation was the result of the infant having made an inference or prediction about the outcome of the action. First, each infant also saw trials depicting a back-of-hand action (see Fig. 1a). Previous studies have demonstrated that this kind of unfamiliar action is not interpreted as goal directed by infants (Woodward, 1999) unless it produces a salient outcome (Kiraly, Jovanovic, Prinz, Aschersleben, & Gergely, 2003). Thus, we reasoned that if motor activation, in our paradigm, is dependent on a process of inferring an outcome, observing this back-of-hand action would not elicit motor activation. Second, to control for the possibility that motor activation is elicited by observing any familiar action posture (without the need for any prior interpretation of the action as goal directed), we tested a different group of infants on mimed versions of the same actions, where the visible absence of any action outcome would prevent interpretation of the action as goal directed.
To identify motor activation, we measured attenuation of the resting state sensorimotor alpha rhythm through electroencephalography (EEG). Attenuation of this rhythm, which is evident both when adults execute actions and when they observe others performing actions (Hari et al., 1998; Muthukumaraswamy et al., 2004), likely reflects activation of the sensorimotor cortex (Hari & Salmelin, 1997). We have recently demonstrated that attenuation of this rhythm can also be measured in 9-month-old infants, in response to observing others’ actions (Southgate, Johnson, Osborne, & Csibra, 2009). Whereas some have related this activation to activity of the so-called mirror neuron system (Kilner, Marchant, & Frith, 2009; Pineda, 2005), for the purposes of the current study, we posit only that this activity is modulated by the goal directedness of the action.
Method
Participants
Twenty-two 9-month-olds (10 females and 12 males; mean age: 273 days, range: 256–292 days) were randomly assigned to one of two conditions (occlusion vs. mimed). An additional 27 infants were excluded because of fussiness or movement (18), no reactive sensorimotor alpha rhythm during reaching (5), maximum suppression at 5 Hz (2), technical error (1), and providing data for only one phase (1).
Procedure
Infants participated in an observation phase, followed by a reaching phase. The primary aim of the reaching phase was to identify the frequency band that was functionally related to motor activation in each infant. Details of the EEG procedures are reported in Supporting Details in the Supplemental Material available on-line.
Observation phase
Infants sat on a caregiver’s lap in front of a puppet stage. When infants were still, the curtains opened, and infants saw either a small occluder at the front of the stage (occlusion condition) or an empty stage (mimed condition). Two experimenters were behind the curtains, one on each side of the stage. On each trial, one of the experimenter’s hands appeared on stage, either from the left or from the right, in either the grasping or the back-of-hand posture, and then either disappeared behind the occluder (occlusion condition) or came to rest on the floor of the stage (mimed condition). Both side of presentation and action posture were presented in a fixed quasi-random order. The time from hand appearance to occlusion of the hand was roughly 600 ms. In both conditions, the curtains closed immediately after the hand came to rest on the stage floor. The length of a single trial (curtains opening to curtains closed) was roughly 2,500 ms. The two trial types (grasping and back of hand) were presented for as long as the infants were attentive, or until they had viewed 60 trials. If infants became distracted, an experimenter attracted their attention back to the stage in between trials by waving a colored lamp through the closed curtains. Trials in which infants did not view the entire sequence, or during which infants made any limb movements, were excluded. The mean number of artifact-free trials contributed for the occlusion condition was 12 (grasp) and 12 (back of hand); and for the mimed condition, it was 14 (grasp) and 13 (back of hand). The point where the hand became occluded from view (occlusion condition) or would have become occluded from view (mimed condition) was marked on the EEG.
Reaching phase
Infants were seated in front of the puppet stage with the curtains closed. When they were still, an experimenter passed a mechanical claw, holding a small graspable toy, through the closed curtains toward the infant. The experimenter waited for the infant to reach and grasp for the toy, before releasing it and removing the claw. A second experimenter retrieved the toy after allowing the infant to play with it briefly. This procedure was repeated until the infant was bored, or until he or she had reached for roughly 20 toys. The mean number of reach trials contributed by infants was 7 (occluded condition) and 9 (mimed condition). The onset of each arm movement was marked on the EEG. (For additional details of the elicited reaching procedure, see Southgate et al., 2009.)
Results
Reaching phase
Segments beginning 1,100 ms before, and ending 1,600 ms after, the onset of movement were selected for analysis. The average activity over the first 400 ms of this segment (premovement baseline) was compared with the average activity over a 1,000-ms period from the onset of movement. For each infant, the frequency that showed the largest decrease from baseline, over this 1,000-ms period, and the two adjacent frequencies were identified as that infant’s sensorimotor alpha range (Southgate et al., 2009). The statistical analyses in the Supplemental Material confirm the expected decrease from baseline during reaching.
Observation phase
For each infant, we quantified the sensorimotor alpha amplitude over the same 3-Hz-wide band identified from his or her brain activity during the reaching phase. Segments beginning 2,100 ms before, and ending 1,100 ms after, the marked event were selected for analysis. The average activity over the first 400 ms of this segment (a baseline while the curtains were closed) was compared with a 400-ms period encompassing the last 300 ms of visible action and the first 100 ms of occlusion (occlusion condition), or with the equivalent period of the visible action (mimed condition).
An analysis of variance (ANOVA) with time (baseline vs. action observation), hand (grasp vs. back of hand), and hemisphere (left vs. right) as within-subject factors and condition (occlusion vs. mimed) as a between-subjects factor revealed a significant interaction among all four factors, F(1, 20) = 7.18, p = .01. Separate ANOVAs comprising the three within-subjects factors were then carried out for each condition. In the occlusion condition, we found a significant interaction among time, hand, and hemisphere, F(1, 10) = 15.94, p = .003. A follow-up ANOVA on data from the left hemisphere revealed a significant interaction between time and hand, F(1, 10) = 12.95, p = .005. There were no main effects or interactions in right-hemisphere channels (ps > .05). Separate paired-samples t tests on left-hemisphere data for each hand posture (grasp vs. back of hand) showed a significant attenuation of activity from baseline for grasp trials, t(10) = 3.23, p = .009, but not for back-of-hand trials, t(10) = .983, p = .42. In the mimed condition, we found only a main effect of time, F(1, 10) = 7.97, p = .02. Data from this condition were therefore collapsed across hand and hemisphere. A paired-samples t test comparing baseline with hand appearance showed that alpha activity in the mimed condition increased significantly from baseline, t(10) = 2.82, p = .02, indicating motor inhibition rather than motor activation. To summarize, infants exhibited a decrease in sensorimotor alpha activity (indicating motor activation) only during observation of a grasping hand action disappearing behind an occluder (see Fig. 1b).
Discussion
The ability to form on-line predictions about the likely outcomes of ongoing events is a prerequisite for a number of social cognitive abilities, including coordinating one’s actions with others, the basis of human ability to cooperate with one another. Although cooperation and collaboration are hypothesized to be defining features of human ontogeny (Tomasello et al., 2005), it was unclear whether infants had the prerequisite ability to generate predictions about others’ actions. Here, we provide evidence that by 9 months of age, infants can form such predictions.
Infants who saw a grasping hand reaching behind an occluder showed activation of their motor system in response to viewing this action, even though the outcome of the action was never seen. The fact that such motor activation was not seen in response to viewing the same grasping action where the outcome was fully visible implies that motor activation was dependent on the interpretation of the action as goal directed. The occlusion of the outcome allowed for an interpretation of the action that the visible outcome precluded. Specifically, not knowing whether there was an object present allowed infants to infer, based on their familiarity with the action, that there should be and thus to interpret that action as directed toward a goal involving the inferred object. In contrast, the visible absence of an object in the mimed condition quite likely prevented goal attribution to the mimed grasping action. This interpretation of the results is further strengthened by the absence of motor activation in response to the occluded back-of-hand action. We predicted that infants would not be able to hypothesize any likely outcome for this unfamiliar action and thus that it would not be interpreted as goal directed. The absence of motor activation confirmed this prediction and also allowed us to conclude that motor activation during the observation of grasping was not driven simply by the presence of the occluder.
Sensorimotor activation during action observation has been interpreted by some authors as reflecting activity in the mirror neuron system (Kilner et al., 2009), and our report of motor activity during an occlusion event bears some resemblance to previous reports of mirror neuron activity during the occlusion of a known outcome in monkeys (Umilta et al., 2001). The canonical view of the functional role of this activity is that it allows direct experiential understanding of an observed action in terms of its goal (Rizzolatti & Craighero, 2004). Our demonstration that motor activation relies on a process of inferring the existence of an object behind the occluder speaks against this view. By our interpretation, motor activation that is dependent on the ability to infer the existence of an object behind the occluder implies that this activation is the result of, rather than a precondition of, goal understanding.
What function could this motor activation serve? An alternative to the canonical view is that motor activation may reflect a process of predicting the likely route by which an attributed goal will be achieved (Csibra, 2007; Jacob, 2008; Prinz, 2006). Evidence suggests that rather than being driven by the direct visual input, motor activation is driven by what an observer expects will happen (Kilner, Vargas, Duval, Blakemore, & Sirigu, 2004). We have also reported a similar phenomenon in infants (Southgate et al., 2009). Under this view, motor activation during observation of the occluded grasping action may reflect infants’ attempt to emulate how the ongoing action will now unfold (Csibra, 2007), having made a prediction concerning the outcome of the action.
Whereas previous studies (Csibra, Biro, Koos & Gergely, 2003; Daum et al., 2008; Daum, Vuori, Prinz & Aschersleben, 2009; Wagner & Carey, 2005) investigating infants’ abilities to infer outcomes of events left open the possibility that infants are only retrospectively evaluating events (Southgate & Csibra, 2009), the current EEG study provides unequivocal evidence that they make inferences about ongoing events, on-line, as they witness them. The emergence of this ability in the 1st year of life could support tailoring their own actions to those of others, thus forming a crucial milestone en route to participation in cooperative and collaborative activities documented in the 2nd year (Warneken & Tomasello, 2007).
Footnotes
Acknowledgements
We thank P. Checa-Fernandéz, S. Lloyd-Fox, O. Rosa Salva, M. Svantesson, and M. Tsolo for assistance.
The authors declared that they had no conflicts of interest with respect to their authorship or the publication of this article.
This work was supported by United Kingdom Medical Research Council Programme Grant G0701484 and by the James McDonnell Foundation.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.