
Abstract
To attenuate the low-frequency vibration transmitted to the driver, a nonlinear seat suspension with high-static-low-dynamic stiffness is designed. First, the force and stiffness characteristics are derived. The nonlinear suspension can achieve the quasi-zero stiffness at the static equilibrium position when the structural parameters are properly designed. Then, a car-seat-human coupled model which consists of a quarter car model, a seat suspension, and a 4 degree-of-freedom human model is established to predict the biodynamic response of the driver. Finally, the isolation performance of the high-static-low-dynamic stiffness seat suspension under two typical road excitations is evaluated separately based on the numerical method. The effects of stiffness ratio, damping ratio, and vehicle speed on the ride comfort are investigated. The results showed that the nonlinear seat suspension outperforms the equivalent linear counterpart and can achieve the best ride comfort when the quasi-zero stiffness condition is satisfied.
Introduction
Vehicle drivers usually suffer from fatigue or lumbago due to the whole-body vibration caused by road excitations. In particular, the low-frequency vibration which ranges from 0.5 to 5 Hz is most harmful to human health. 1 Thus, the vehicle suspension and seat suspension play an important role in the vibration attenuation. As is known, the linear suspension is not suitable for low-frequency vibration isolation due to the inherent contradiction between the natural frequency and the static deflection. To further improve the ride comfort, many efforts have been made on the active and semi-active suspensions.2–4 However, additional energy is required for these controlled suspensions, and the implementations could be complicated. In the past 10 years, the nonlinear vibration isolators with high-static-low-dynamic stiffness (HSLDS) have become the focus of many scholars since they can isolate low-frequency vibration effectively. 5 The HSLDS vibration isolator can be implemented by combining the linear vibration isolator in parallel with a stiffness corrector, which can provide the negative stiffness in the direction of the load movement. Thus, the positive stiffness can be counteracted by the negative one. Therefore, the HSLDS property can be obtained by designing proper structural parameters, leading to a lower natural frequency. If the stiffness at the static equilibrium position is zero, the quasi-zero stiffness (QZS) is obtained. Therefore, it can be an effective method to attenuate the low-frequency vibration by applying an HSLDS vibration isolator to the seat suspension.
A variety of HSLDS vibration isolators have been proposed. Carrella et al. 6 developed an HSLDS vibration isolator using two oblique springs as stiffness corrector and analyzed its transmissibility performance analytically. Huang et al. 7 built a QZS vibration isolator using Euler buckled beams as stiffness corrector and investigated the isolation performance by theoretical and experimental study. Zhou et al. 8 and Cheng et al. 9 investigated the dynamic behaviors and the isolation performance of an HSLDS vibration isolator using two cam-roller-spring mechanisms as stiffness corrector. Shan et al. 10 developed an HSLDS vibration isolator which combines two magnetic rings in parallel with the pneumatic spring and verified its effectiveness by experiment. Recently, Yang et al. 11 designed a new QZS vibration isolator using connecting rods and tension springs as stiffness corrector. Besides, Su et al. 12 presented a novel HSLDS vibration isolator using two permanent magnets and an electromagnet as stiffness corrector, which can work in the semi-active mode. In addition to isolating translational motion, Zheng et al. 13 proposed a torsional QZS vibration isolator using a torsion magnetic spring as stiffness corrector. Sun et al. 14 proposed an HSLDS vibration isolator using a parabolic-cam-roller mechanism as stiffness corrector and studied the effects of asymmetric stiffness on the isolation performance. Liu et al. 15 further investigated the effect of Coulomb friction on the displacement transmissibility of a QZS vibration isolator experimentally and found that adding light Coulomb friction is beneficial to the isolation performance.
Besides, Tang and Brennan 16 investigated the isolation performance of an HSLDS vibration isolator under shock excitation and found that it outperforms the equivalent linear counterpart when the excitation magnitude is not too large. Furthermore, Wang et al. 17 analyzed the isolation performance of a QZS vibration isolator under random excitation and demonstrated that the QZS vibration isolator can achieve a lower mean square relative displacement than the equivalent linear one.
It can be concluded from the literature mentioned above that the research is mainly focused on the single degree-of-freedom (SDOF) system. However, less attention is paid to their application on the vehicle seat. Le and Ahn 18 proposed an HSLDS vibration isolator using two symmetric structures as stiffness corrector and applied it to the vehicle seat. But the biodynamic response of a driver was not taken into consideration. Then, Yan et al. 19 proposed an HSLDS seat suspension whose stiffness corrector is similar to the prototype reported in Zhou et al. 8 A 4-degree-of-freedom (4-DOF) human body model was coupled with the proposed seat suspension. However, the vehicle ride comfort under shock and random excitations induced by uneven road profiles was not investigated. Recently, Zhou et al. 20 proposed a QZS suspension and applied it to neonatal transport. But only 2 DOFs were considered. To predict the biodynamic response of a seated human, many lumped parameter models with different degrees of complexity were established and summarized by Liang and Chiang 21 in detail. An HSLDS seat suspension is developed in this article, which has been proposed in our previous study. 22 , 23 Then, a 4-DOF human body model established by Liu et al. 24 is considered, which consists of the pelvis, upper torso, viscera, and head. This lumped parameter model can distinguish the responses of the most important human parts. Moreover, a quarter car model is taken into account to predict the biodynamic response more reasonably.
The main contribution of this article is to verify that the proposed HSLDS seat suspension has great isolation performance under shock and random excitations induced by uneven road profiles, which was rarely reported in the literature. The rest of this article is organized as follows. In section “Modeling of an HSLDS seat suspension,” an HSLDS seat suspension with a simple form is developed, and the force and stiffness characteristics are derived. In section “Car-seat-human coupled model,” a car-seat-human coupled model is established, which includes a quarter car model, a seat suspension, and a 4-DOF lumped parameter model of the human body. In section “Isolation performance,” the biodynamic response of driver under shock and random excitations is obtained, respectively, and the ride comfort is analyzed in detail. The main conclusions are drawn in section “Conclusion.”
Modeling of an HSLDS seat suspension
An HSLDS seat suspension consisting of a vertical spring, a stiffness corrector, and a guide mechanism is developed, as shown in Figure 1. The stiffness corrector is mainly composed of horizontal springs, connecting rods, hinge axes, and brackets, as shown in Figure 1(b). The guide mechanism consists of guide rods, rollers, and limiting grooves, which is used to make the loading support only move in the vertical direction, as shown in Figure 1(c). Specially, all the connecting rods have the same length L. Both ends of the connecting rod are hinged with an axis and a bracket, respectively. The horizontal springs are connected with two hinge axes, and their total stiffness is
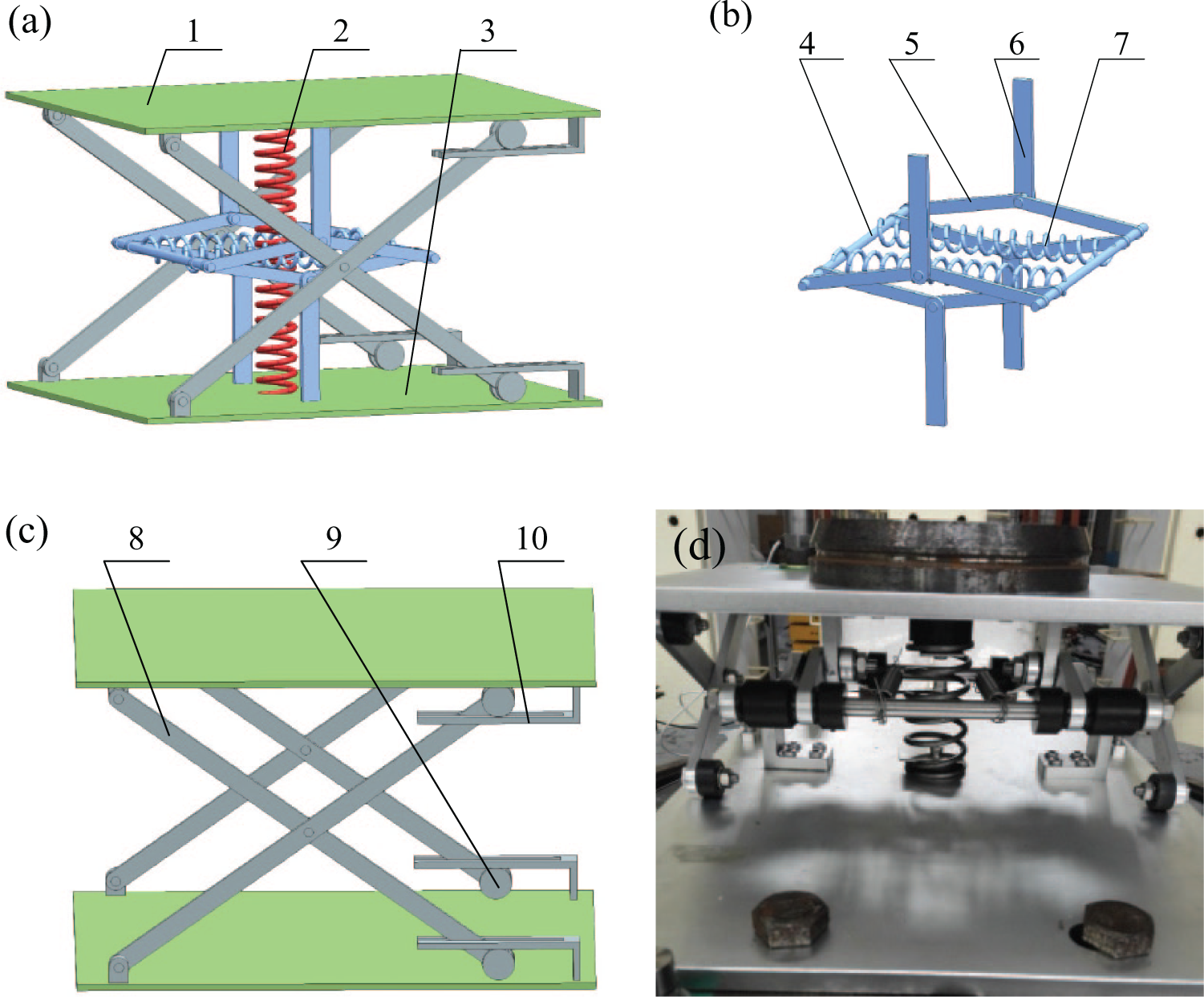
HSLDS seat suspension model: (a) three-dimensional structural diagram, (b) stiffness corrector, (c) guide mechanism, and (d) physical prototype.
The schematic diagram of the static analysis is shown in Figure 2.

where

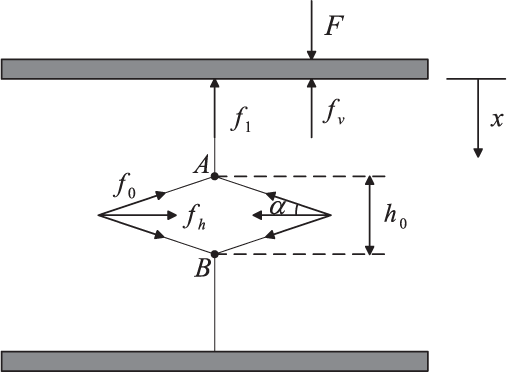
Schematic diagram of static analysis.
Note that
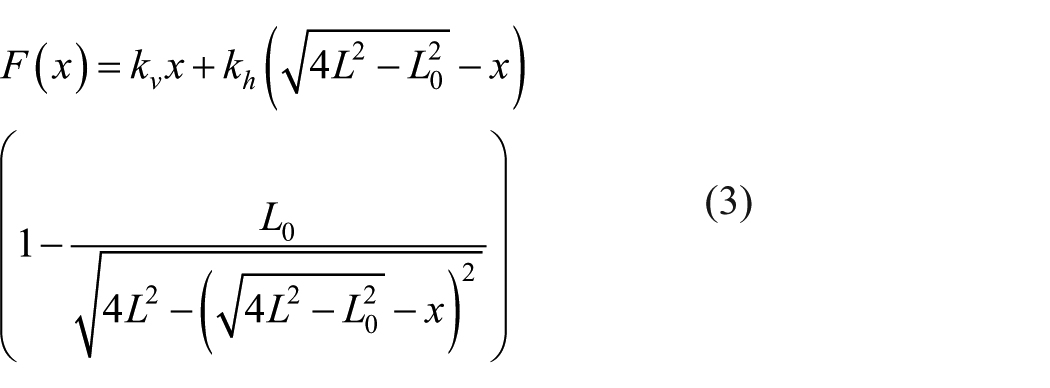
Equation (3) can be transformed into a nondimensional form
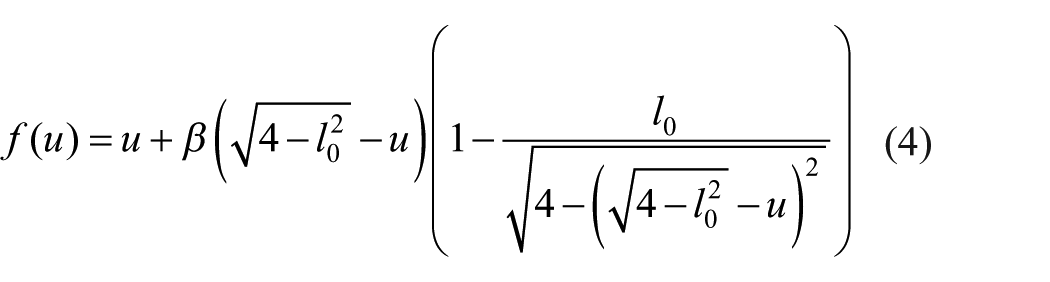
where
The nondimensional stiffness of the seat suspension can be obtained by differentiating equation (4) with respect to u
It can be easily found that the stiffness has a minimum value at

By introducing a displacement transformation


The nondimensional restoring force and stiffness as a function of displacement q for various stiffness ratios are shown in Figure 3. It can be clearly observed that the minimum stiffness is getting smaller as β increases. Note that the minimum stiffness becomes zero when β increases to 4, which means the QZS property is achieved. If β increases further, the minimum stiffness becomes negative, which is undesirable in practice. As a result, when
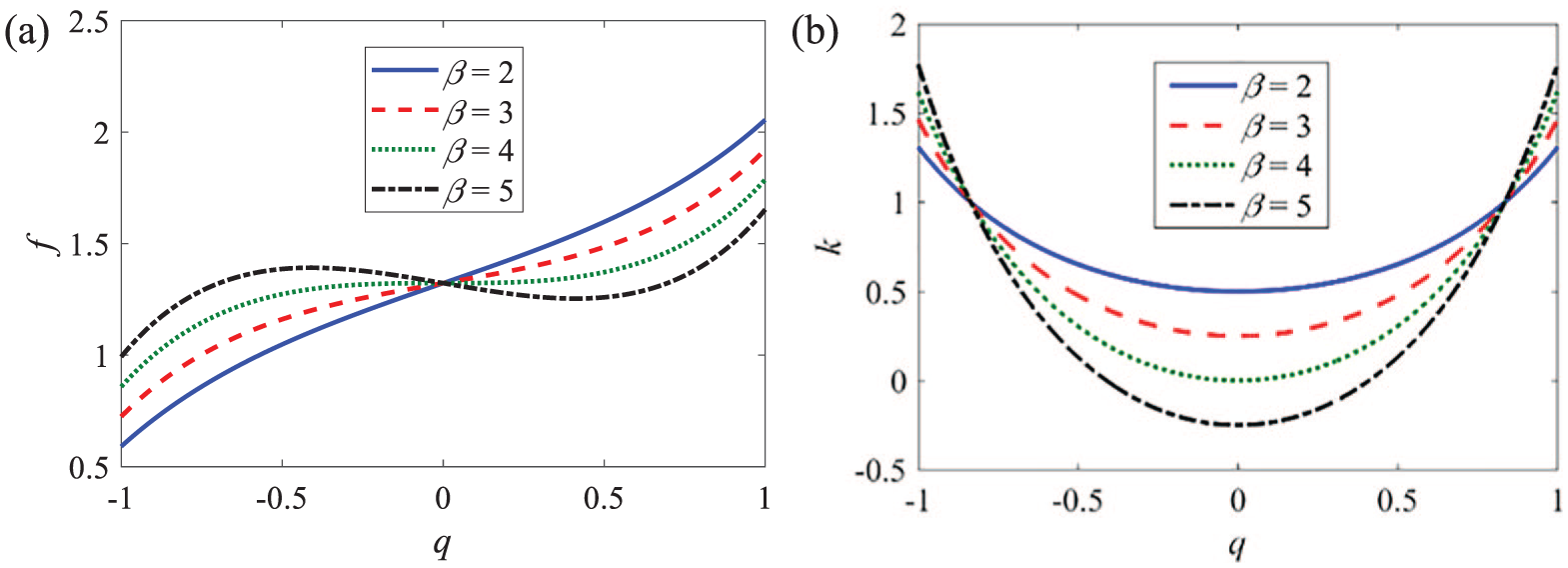
Nondimensional (a) restoring force and (b) stiffness for various β when
With the purpose of simplifying the following dynamic analysis, equation (7) can be approximated by a fifth-order Taylor series about

where
Then the approximate stiffness of the HSLDS seat suspension is given by

The exact restoring force of the seat suspension and its approximation are shown in Figure 4. It can be observed that the approximate accuracy is dependent on the displacement. Generally, the approximate restoring force matches well with the exact one over the selected displacement range, indicating that it is reasonable to use the approximate expression for the following analysis.
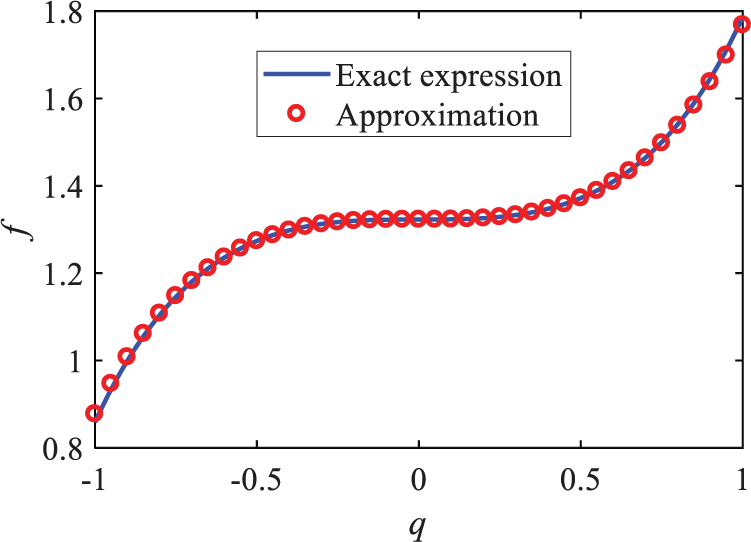
Exact restoring force and its approximation when
Car-seat-human coupled model
The car-seat-human coupled model is established as shown in Figure 5. A quarter car model is chosen because of its simplicity and has been widely used for the ride research. 25 With the purpose of predicting the biodynamic response of the driver, a 4-DOF lumped parameter model of the human body is introduced. This human model consists of pelvis, torso, viscera, and head, which can distinguish the responses of the most important human parts. Besides the vehicle suspension and the seat suspension, the seat cushion also has the effect of vibration attenuation. Thus, the seat cushion is also considered in the car-seat-human coupled model.
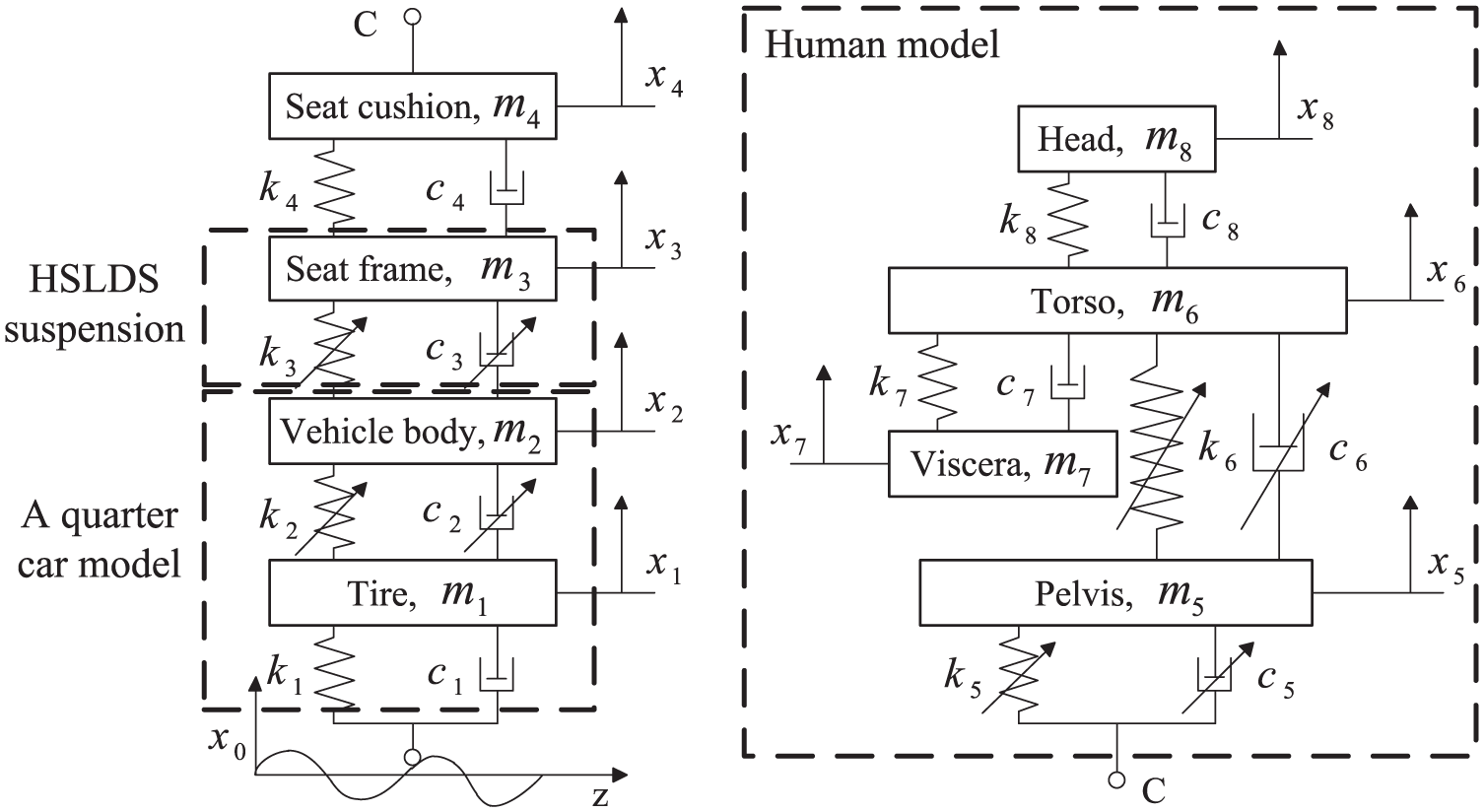
Car-seat-human coupled model.
As shown in Figure 5, the car-seat-human coupled system has 8 DOFs: x1, x2, x3, x4, x5, x6, x7, and x8. It is assumed that the free position of each DOF is the origin of the absolute coordinate system.
The tire may depart from the ground occasionally due to uneven road profiles. Therefore, the restoring force


Generally, special stoppers are installed in the vehicle suspension with the purpose of avoiding a large stroke and rigid collisions between the tire-wheel assembly and the vehicle body. As a result, the restoring force
where
In addition, the damping coefficient of the vehicle suspension damper which is placed between the wheel and the vehicle body can take different values in compression and extension processes. 26 Thus, the damping coefficient is given by

where
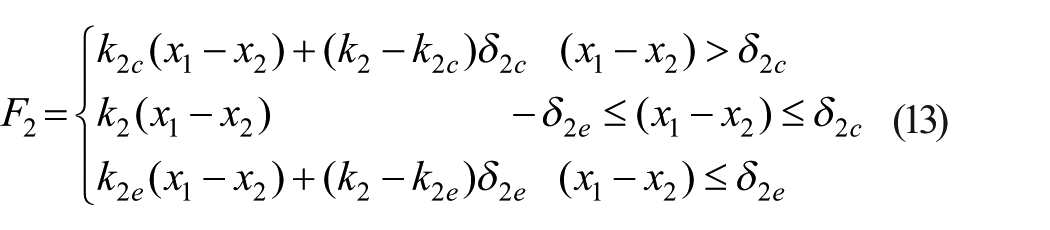
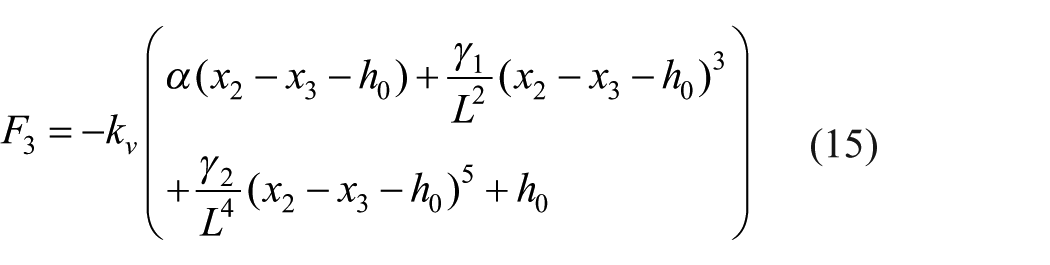
According to the aforementioned static analysis, the restoring force of the HSLDS seat suspension yields the following expression, corresponding to the absolute coordinate system of the car-seat-human model
and the restoring force of equivalent linear seat suspension is given by
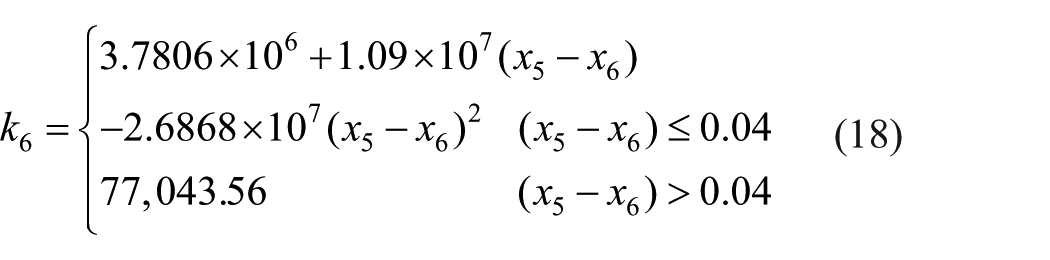
For the selected human model, the stiffness of the pelvis is characterized by a nonlinear function

It is worth to note that

The stiffness of the torso is also characterized by a nonlinear function
Moreover, part of the damping coefficients are given by

where
According to Newton’s second law, the equations of motion of the car-seat-human coupled system are governed by








where g denotes the acceleration of gravity.
Isolation performance
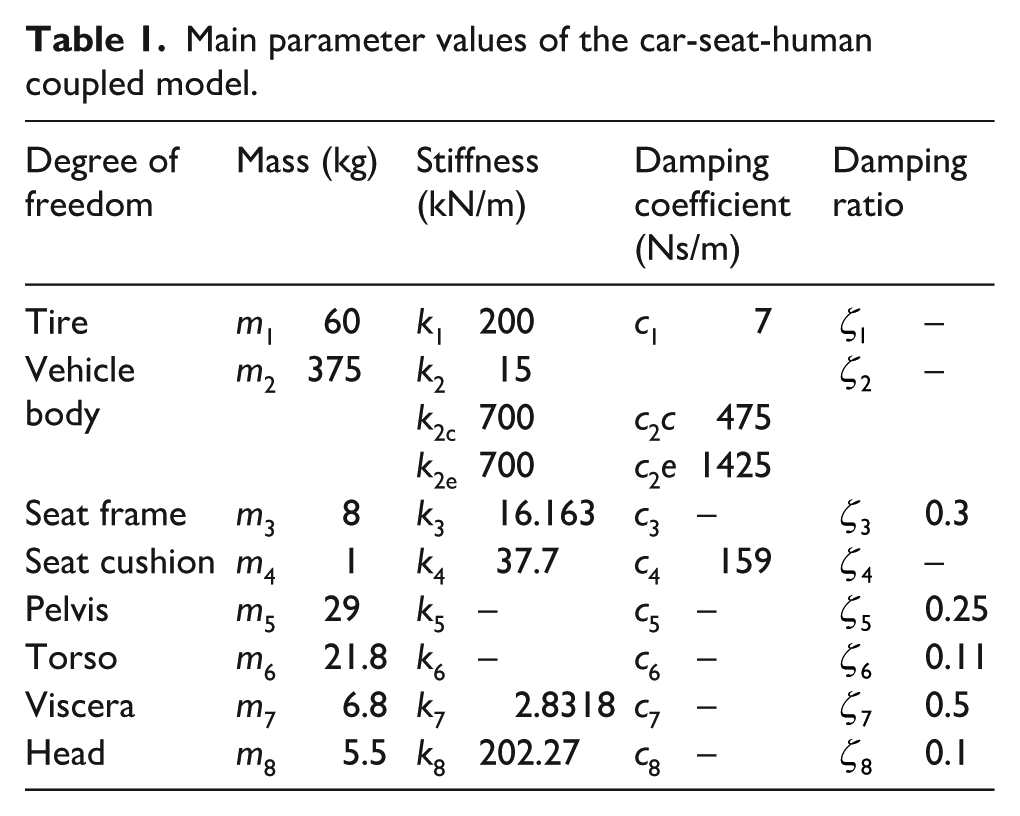
The main parameter values of the car-seat-human coupled model 27 are given in Table 1. Note that the total mass of the human model is about 70% of the weight of the driver because the remaining part is supported by the feet. 28
Main parameter values of the car-seat-human coupled model.
The numerical simulation based on the fourth-order Runge–Kutta method is used to solve the differential equations of motion. The initial displacement of each DOF is in its static equilibrium position, and the initial velocity is zero. Then the time-domain response can be obtained for analysis.
Performance under shock excitation
The shock excitation is one of the typical road excitations considered in the simulation. When the vehicle passes with a constant speed
where
The shock responses of different human components for various β are shown in Figure 6. For simplicity, the acceleration histories are shown as a function of the normalized time
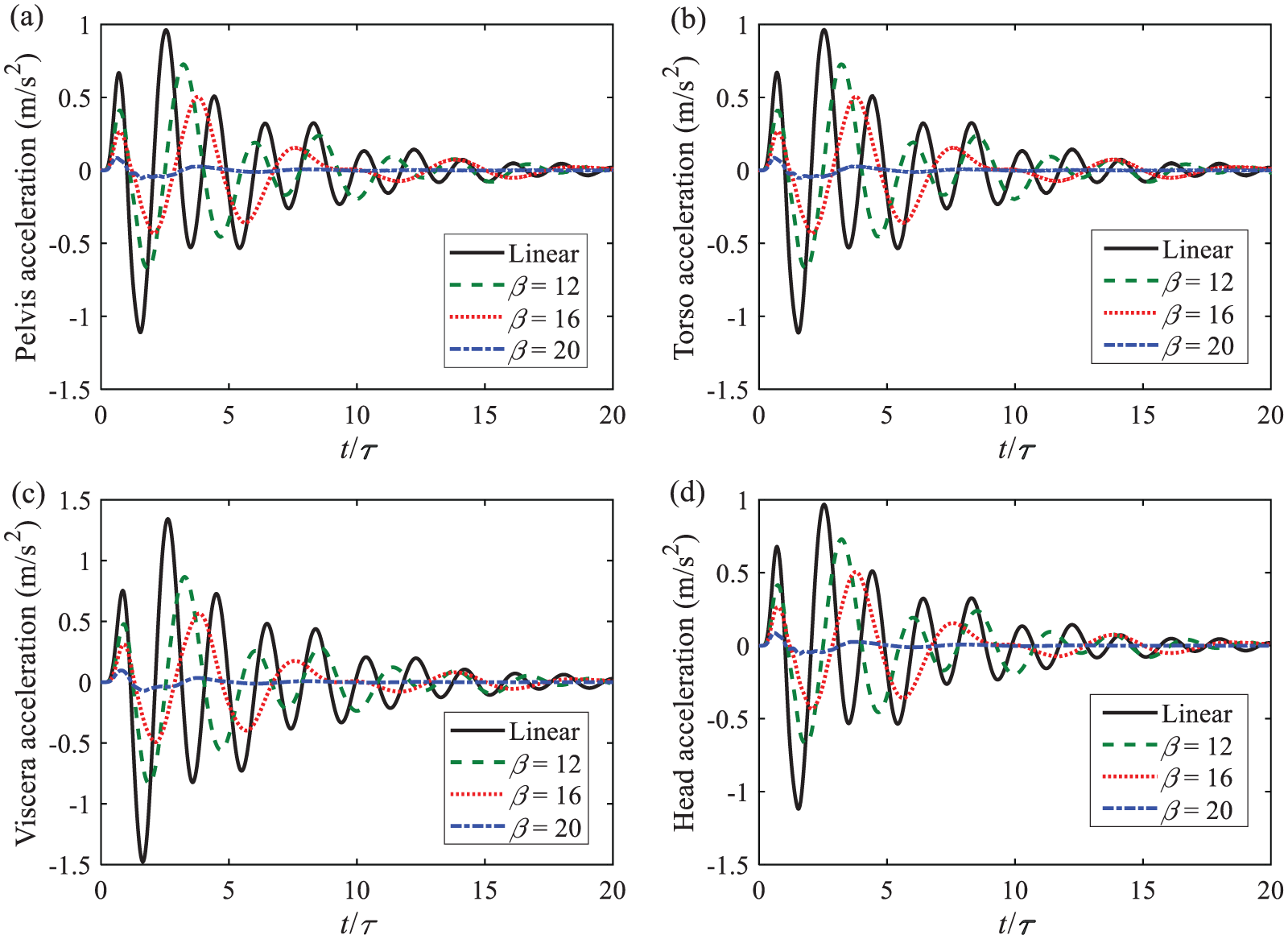
Acceleration time histories: (a) pelvis, (b) torso, (c) viscera, and (d) head.
More information about the dynamic pelvis load and the seat suspension stroke is shown in Figure 7. It can be observed that applying an HSLDS seat suspension can achieve a lower dynamic load for the pelvis compared to the linear seat suspension. Specifically, increasing the stiffness ratio can lead to a decrease in dynamic pelvis load. However, the stroke of the HSLDS seat suspension is larger than that of the linear counterpart. This is because the dynamic stiffness of the HSLDS seat suspension is smaller than that of the linear one. Thus, there is a sacrifice in terms of seat stroke. A very large seat stroke is adverse to the operation of the driver and safety. Note that the stroke of the HSLDS seat suspension is still within the allowable range (i.e. 0.08 m). 29
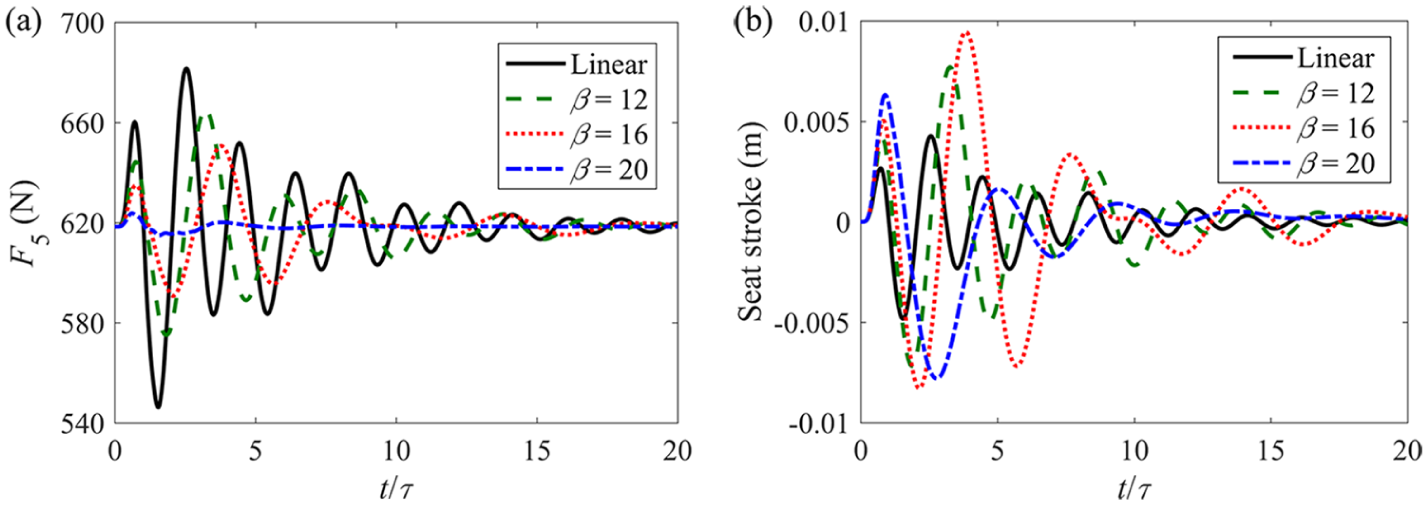
Time histories: (a) dynamic pelvis load and (b) seat suspension stroke.
In order to assess the ride comfort, the peak load is selected as the index for the pelvis, torso, and viscera, which is defined as the product of the mass multiplied by the peak value of acceleration history. In particular, the head injury criterion (HIC) 27 is chosen as the performance index for the head. These performance indices are expressed as

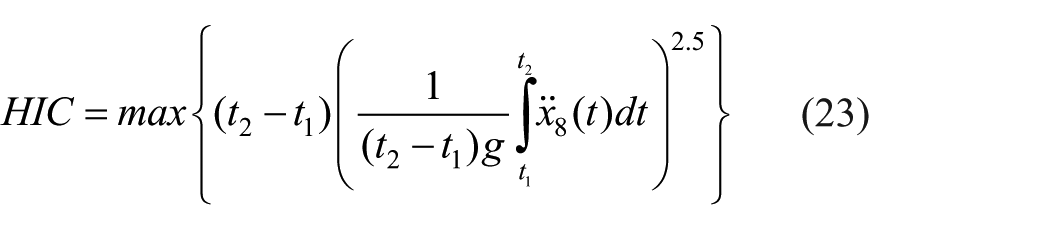
where
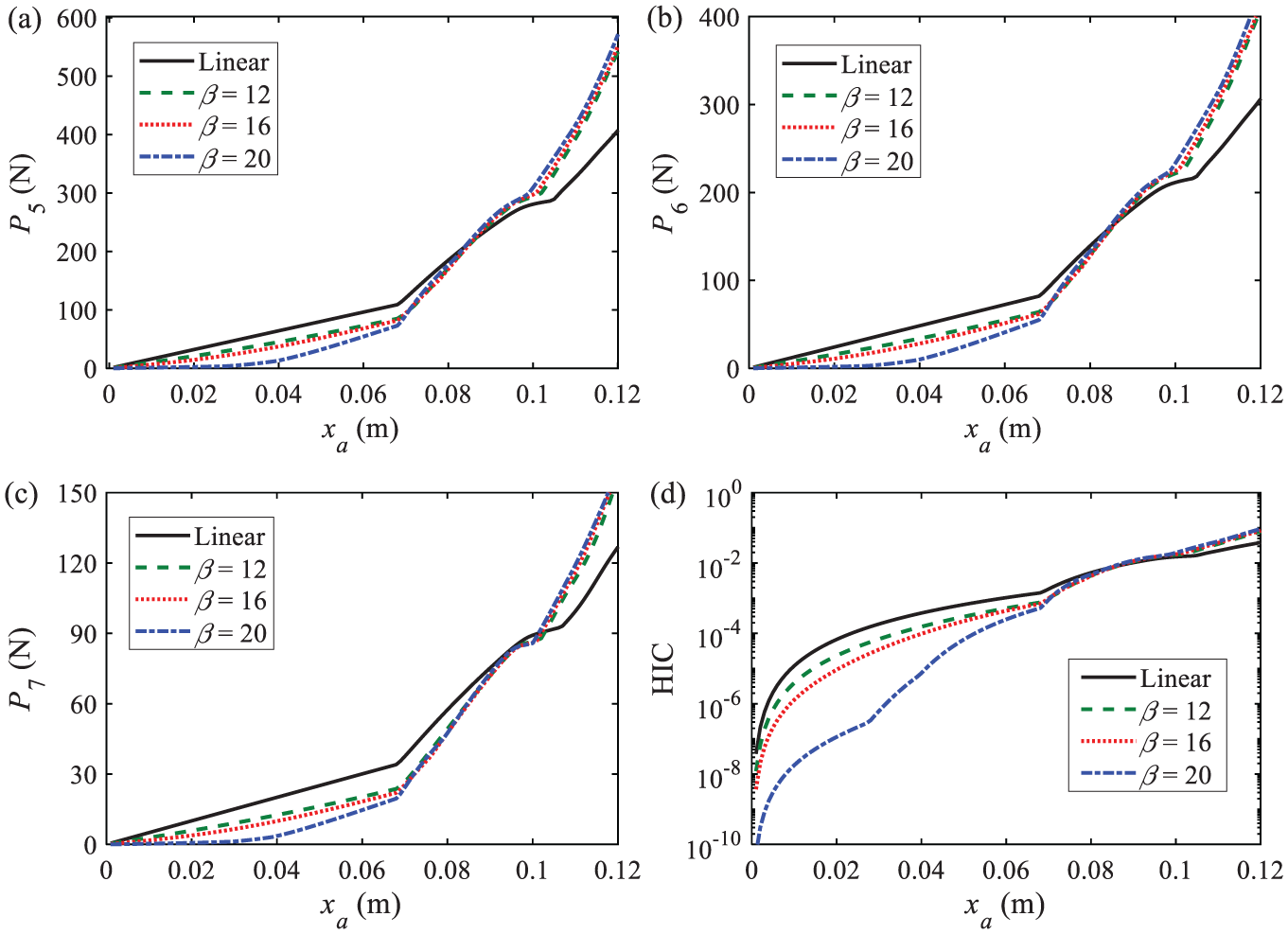
The peak loads and the HIC as a function of
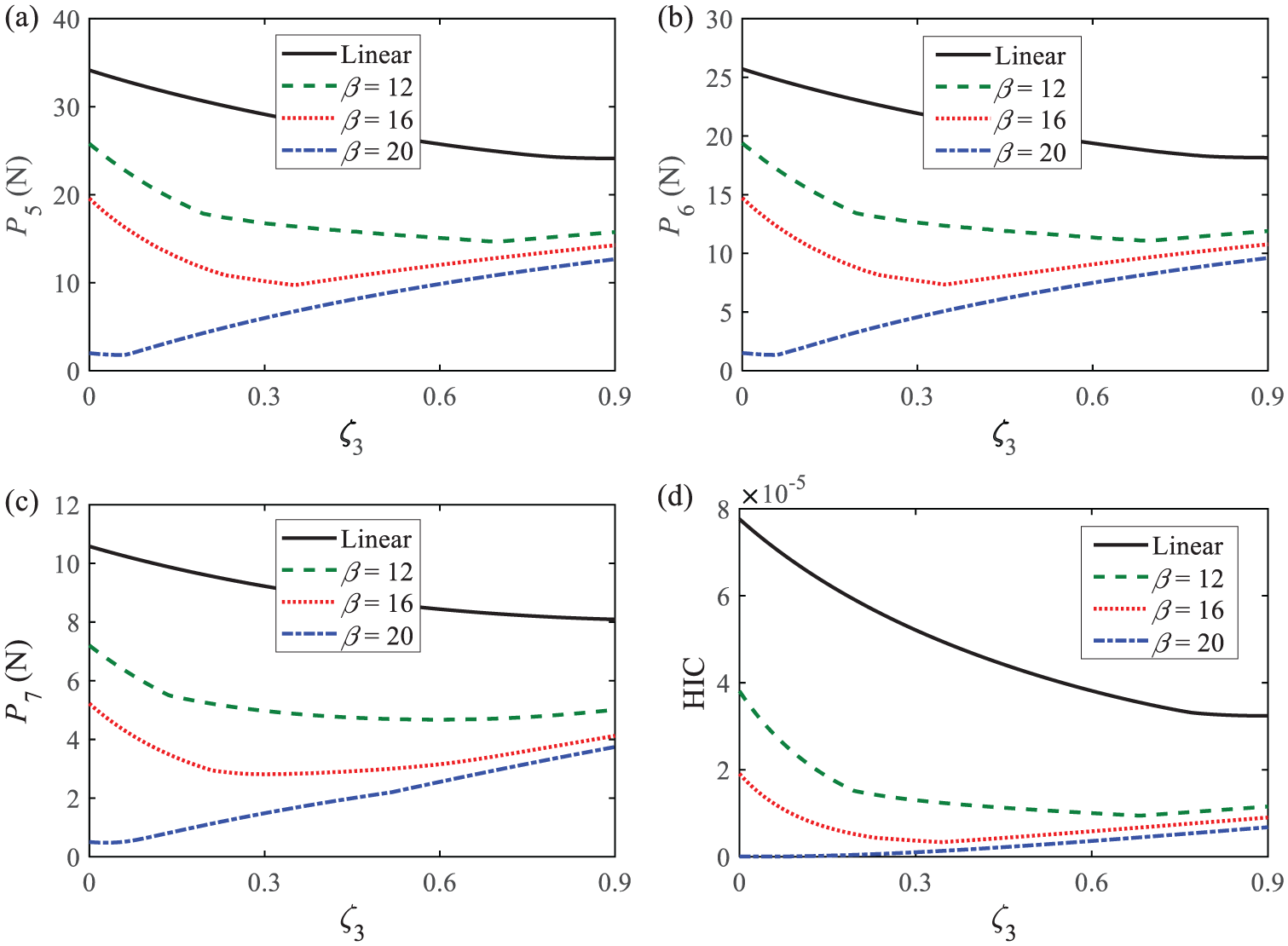
Peak load as a function of
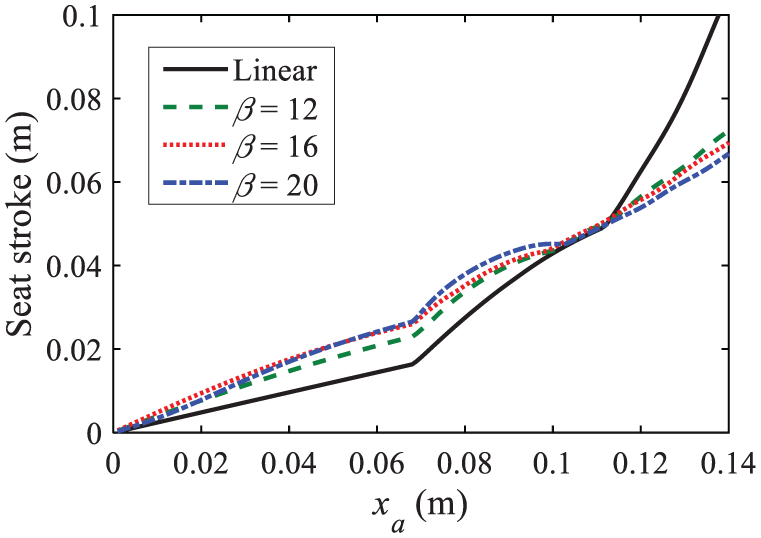
Figure 9 shows the seat suspension stroke for various stiffness ratios. It can be observed that both strokes of the HSLDS seat suspension and the linear one decrease with the increase in
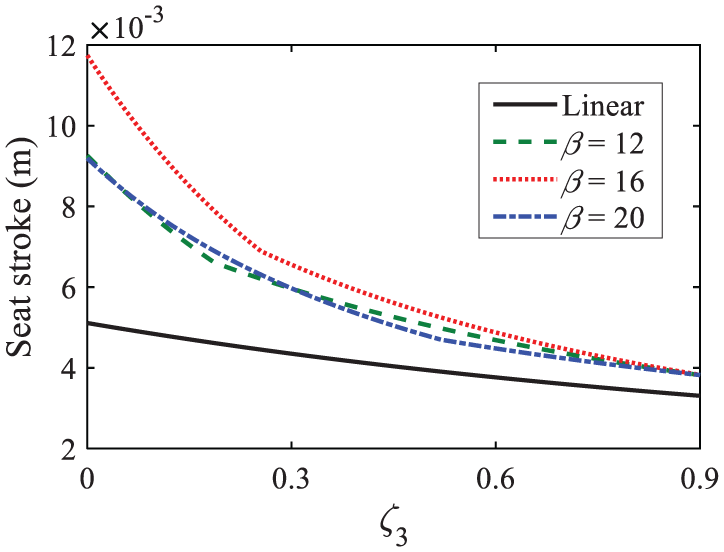
Seat suspension stroke as a function of
The effects of stiffness ratio β on the peak loads and the HIC for various damping ratios are shown in Figure 10. It can be observed that increasing β can lead to the reduction of peak loads and HIC. This result is consistent with our previous study
23
in which the harmonic base excitation was considered. Thus, applying the nonlinear seat suspension with QZS property can achieve the best ride comfort. When β is close to 20, increasing
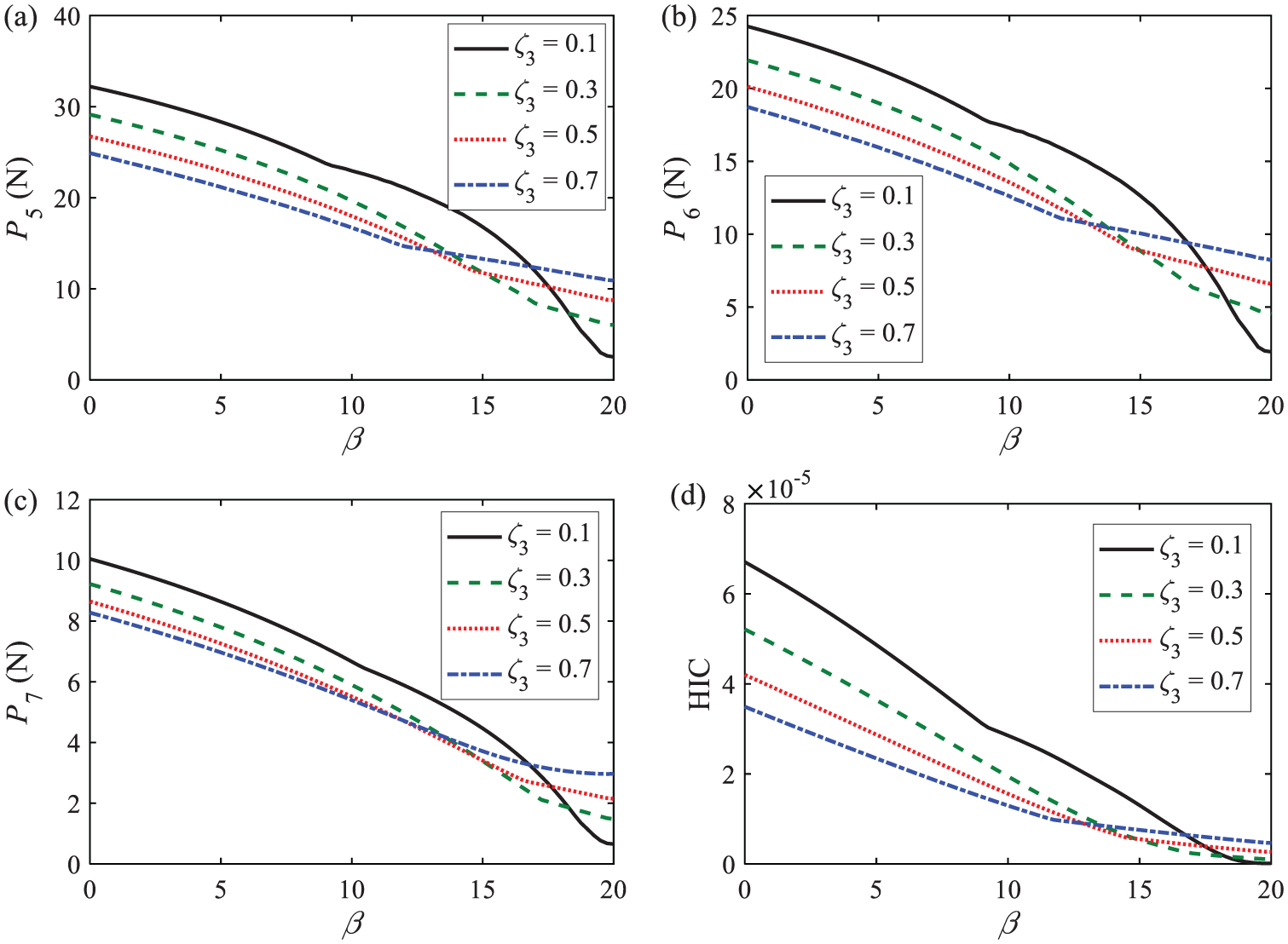
Peak load as a function of β: (a) pelvis, (b) torso, (c) viscera, and (d) head injury criterion.
More information about the seat suspension stroke is shown in Figure 11. It can be observed that the seat suspension stroke increases at first and then decreases with the increase in β. A peak occurs when β is close to 17. Note that the variation of the seat stroke becomes smaller when greater
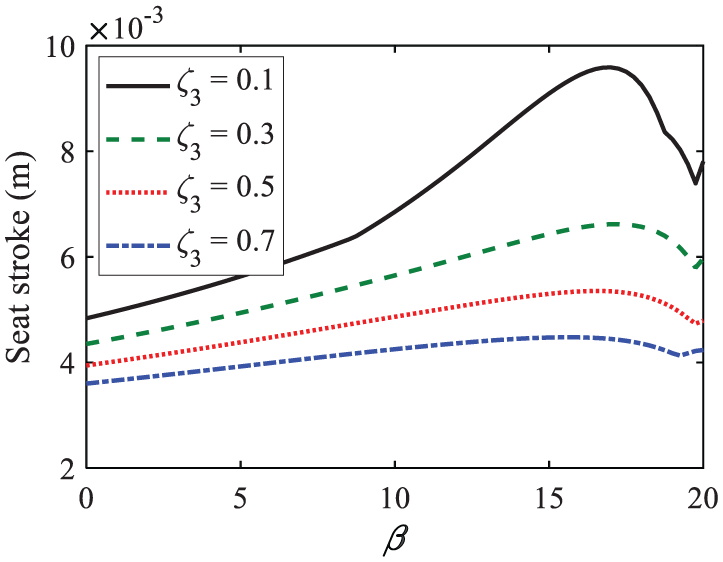
Seat suspension stroke as a function of β.
The effects of bump height
Peak load as a function of
More information about the seat suspension stroke is given by Figure 13. It can be observed that increasing bump height can lead to an increase in seat suspension stroke. Similarly, when
Seat suspension stroke as a function of
There is no doubt that the vehicle speed
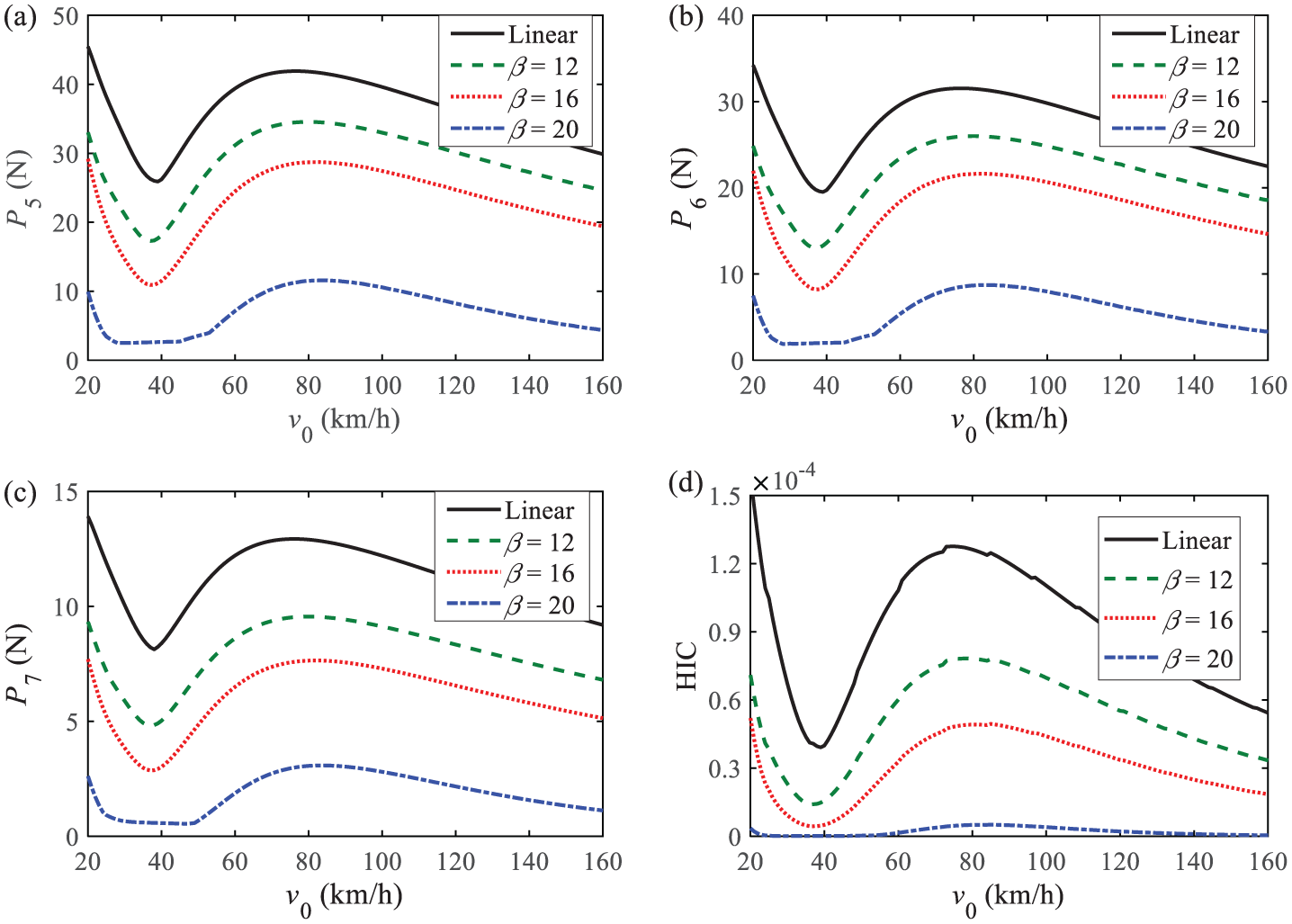
Peak load as a function of
The seat suspension stroke is shown in Figure 15. It can be observed that the seat stroke has the same variation trend as the performance indices. The seat stroke also gets a peak value when
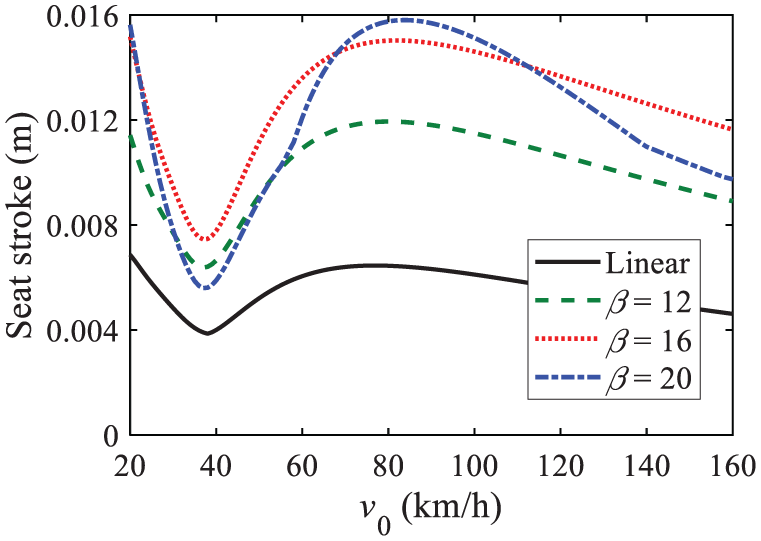
Seat suspension stroke as a function of
Performance under random excitation
A more realistic road profile is considered in this subsection, which generates random excitation. The stochastic road irregularities can be characterized by the following power spectral density
where Ω is the spatial frequency, and

where N is the number of harmonic terms considered in the random excitation.

where
The values of the parameters related to the random excitation are chosen as:
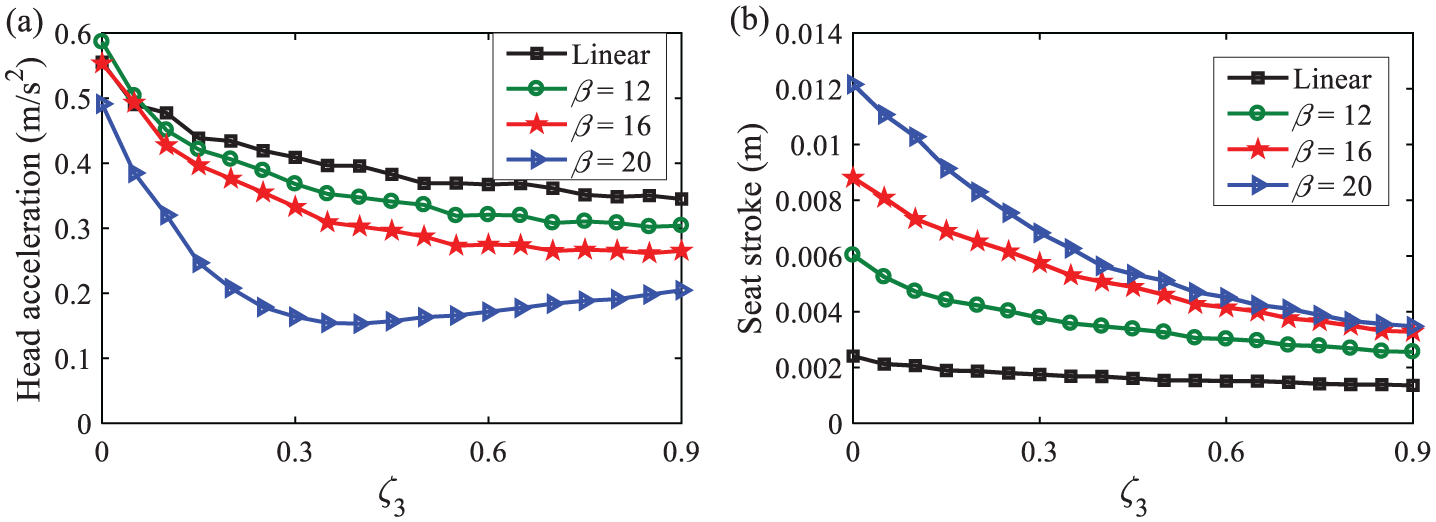
RMS values as a function of
The influences of stiffness ratio β on the head acceleration and the seat suspension stroke are shown in Figure 17. It can be observed that increasing β is beneficial to vibration attenuation. When β increases to 20, the nonlinear seat suspension can achieve the best ride comfort because the QZS property is obtained. The seat suspension stroke keeps going up with the increase of β when
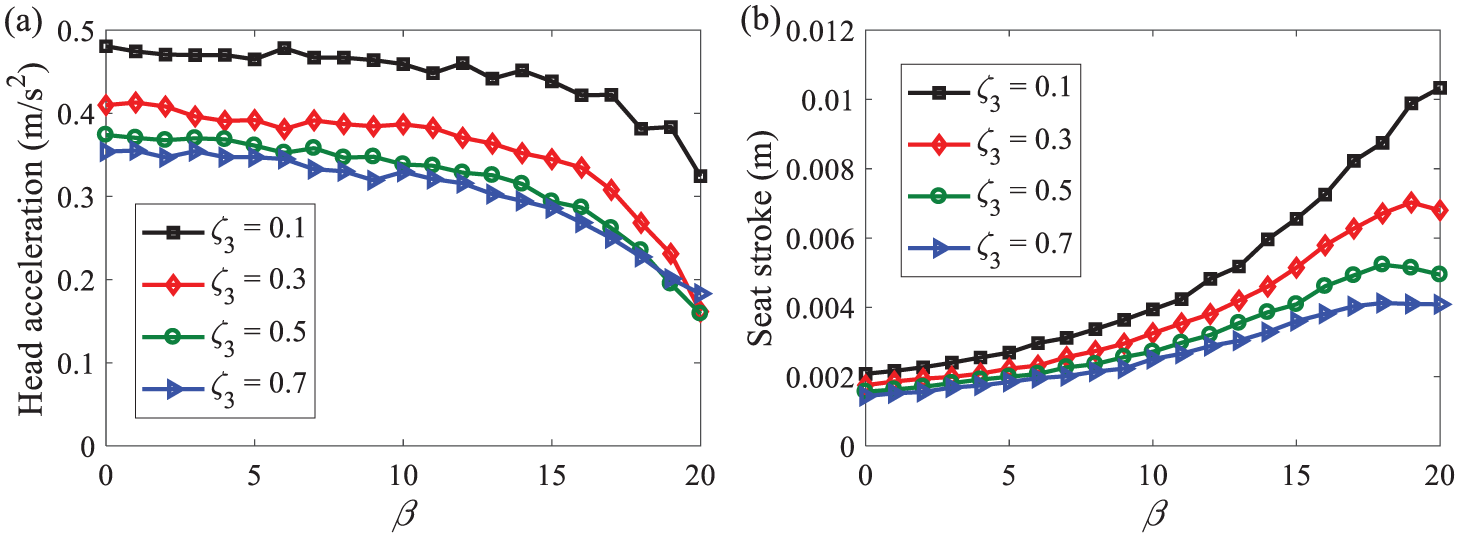
RMS values as a function of β: (a) head acceleration and (b) seat suspension stroke.
The effects of vehicle speed
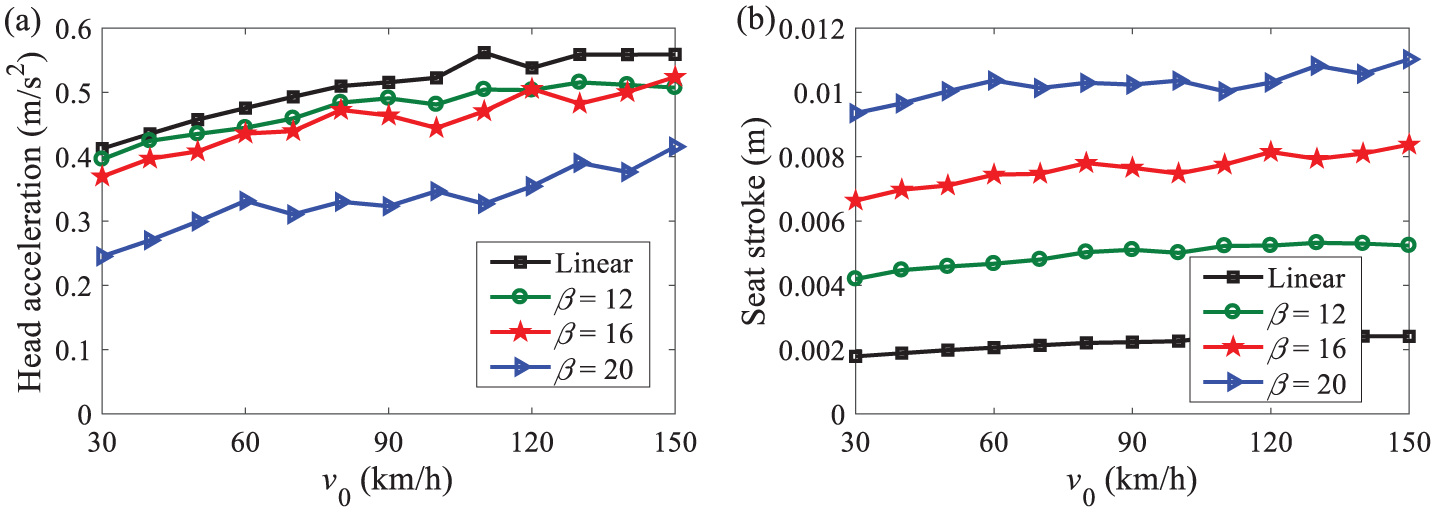
RMS values as a function of
Conclusion
The HSLDS seat suspension is designed to attenuate the low-frequency vibration and improve ride comfort. A car-seat-human coupled model is established to predict the biodynamic response of a driver. The numerical method is used to validate the isolation performance of the HSLDS seat suspension under shock and random excitations induced by uneven road profiles. The results show that the HSLDS seat suspension outperforms the equivalent linear counterpart in terms of ride comfort when the bump height is not too large. The HSLDS seat suspension can also perform a better ride comfort under random excitation. Although applying the HSLDS seat suspension could lead to a greater seat stroke, it is still within the allowable range. Besides, applying a proper seat suspension damping can further improve the ride comfort and suppress the seat stroke. Moreover, the nonlinear seat suspension can achieve the best ride comfort when the QZS condition is satisfied. In a word, the application of the HSLDS seat suspension is a simple and effective way to attenuate the undesirable whole-body vibration.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by National Natural Science Foundation of China (Grant No. 51605209), Natural Science Research of Jiangsu Higher Education Institutions of China (Grant No. 18KJD460003), Natural Science Research Foundation of Jiangsu Normal University (Grant No. 18XLRS009), and Jiangsu Government Scholarship for Studying Abroad.