
Abstract
The mechanical properties of a component change with any type of damage such as crack development, generation of holes, bend, excessive wear, and tear. The change in mechanical properties causes the material to behave differently in terms of noise and vibration under different loading conditions. Thus, the present study aims to develop an artificial neural network model using vibration signal data for early fault detection in a cantilever beam. The discrete wavelet transform coefficients of de-noised vibration signals were used for model development. The vibration signal was recorded using the OROS OR35 module for different fault conditions (no fault, notch fault, and hole fault) of a cantilever beam. A feed-forward network was trained using backpropagation to map the input features to output. A total of 603 training datasets (201 datasets for three types of cantilever beam—no fault, notch fault, and hole fault) were used for training, and 201 datasets were used for testing of the model. The testing dataset was recorded for a hole fault cantilever beam specimen. The results indicated that the proposed model predicted the test samples with 78.6% accuracy. To increase the accuracy of prediction, more data need to be used in the model training.
Introduction
A cantilever beam is a very simple element in the mechanical elements category. It is observed that the repair time of any breakdown is lesser if detection of the damaged area is early identified. Therefore, it is essential to detect faults beforehand with a system that can indicate types of faults and their location. This type of approach surely reduces maintenance costs to a greater extent and motivates pre-failure measures. Many studies have been conducted in this area by considering noise and vibration signals of a cantilever beam. The fundamental factors considered in all of these studies are static and dynamic changes in the behavior of a beam under faulty conditions. Static changes can be defined as change in mass and stiffness of a beam, whereas dynamic change includes the change in damping ratio, natural frequency, and vibration modes.
In the past, many studies have been conducted in the field of fault detection using vibration signal data.1–5 Lee and Lee 3 derived a dynamic model for analyzing the effect of a misaligned rotor ball bearing system driven by a flexible coupling on the natural frequency of the system. Farrar and Worden 2 have studied the structural changes such as stiffness and mass, natural frequencies, and damping rate occurred due to small damage in the material. Patel and Darpe 6 studied on the vibration response of an experimental setup consisting of two rotor shafts coupled with a single induction motor when subjected to parallel and angular misalignment. Amplitude and displacement responses at subcritical speeds were used in the detection of faults (cracks, misalignment, or bearing faults). Kang et al. 7 studied the dynamic behavior of a gear rotor system having a viscoelastic support system subjected to gear eccentricity, gear mesh transmission error, and residual shaft bow. The study results depicted that changes in the system’s natural frequency under steady-state response depend on mass, stiffness, and loss factor of the support system. Abdilrazzaq 8 has studied the effect of locations of circular holes in a cantilever beam on the natural frequency and stiffness of the beam. Attoui et al. 9 have proposed a method for prediction of fault along with the position for an unbalanced rotary system using discrete wavelet transform (DWT) and fast Fourier transform (FFT) methods. Zhang et al. 10 proposed an artificial neural network (ANN) model worked for fault detection of a blower using FFT data of vibration signals. Ojha et al. 11 worked on fault identification and maintenance of belt conveyor systems using vibration data analysis. Gawande and More 12 have studied effects of depth and location of notch in a cantilever beam on the natural frequency of a cantilever beam. Yamamoto et al. 13 have conducted a pilot study on an unbalanced rotational system to identify the fault in an induction motor using fast Fourier transform vibration signal data. The study suggested the method for effective reduction of vibration of the unbalance rotating system by correction of masses and location of shafts. Saxena et al. 14 have analyzed effect of different types of gears used in rotary shafts on the natural frequency of the system. The study also proposed a method for estimating the remaining useful life. Most of the abovementioned studies analyzed the effect on natural frequency of the system or element due to fault conditions using visual observations of the FFT data. The process is a challenging task and time intensive. The current study aims to establish an ANN-based machine learning model for prediction of early fault conditions. The study used the selected features of vibration signals for training and testing of the ANN model.
Materials and method
Method
The current study aims to design an effective and robust methodology in fault prediction using the ANN model for a cantilever beam. The flowchart of the working methodology is shown in Figure 1. Flowchart of the working methodology.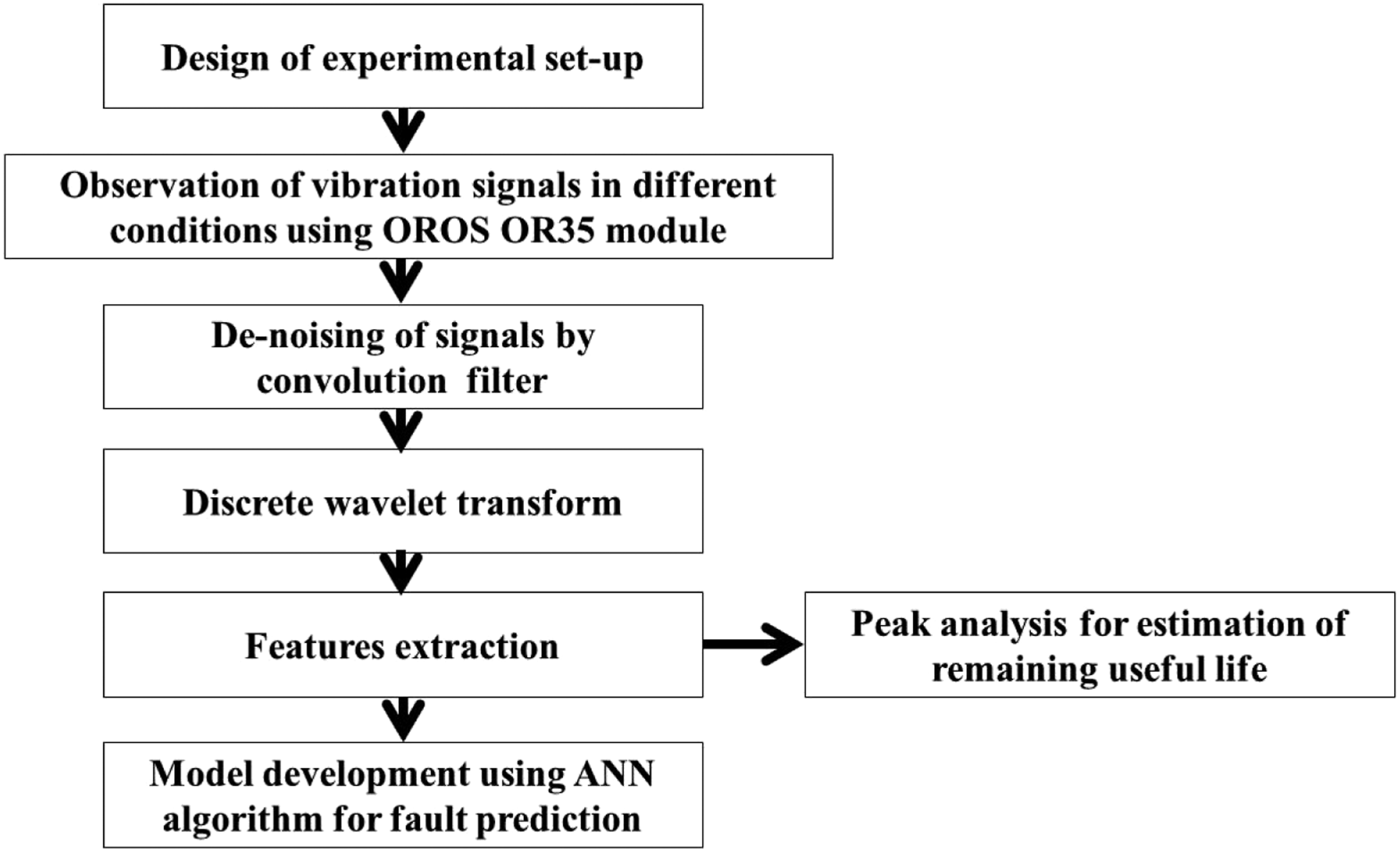
Design of experimental setup
The experimental setup for obtaining the vibrational responses of a cantilever beam is shown in Figure 2(a). The experimental setup was designed using the components such as an OROS OR35 vibration response recording module, a mechanical shaker, an accelerometer, and a force sensor. The sensitivity of the accelerometer (256HX-100-13045) and force (2311-500-20007) sensors was 97.13 mV/g and 113.07 mV/N, respectively. Four pieces of aluminum alloy of size 300 mm × 30 mm × 3 mm (shown in Figure 2(b)) were used as a cantilever beam for the study. The reasons for selecting the aluminum alloy are low stiffness and less mass. The vibration responses of three beams were recorded with no faults, a hole fault, and a notch fault for the training data, and the responses of the fourth one were taken with notch fault for testing data. The induced faults in the beams (Figure 2(b)) were created with a notch size of 5 mm × 1 mm × 3 mm from one end and equally spaced from both edges and a hole of 10 mm diameter at a location of 100 mm from one end. The test specimen was induced with a hole fault of 10 mm diameter at a location of 180 mm from one end. The specimens are fixed by a C-clamp on table top, and the free end is in contact with the shaker. A force sensor is attached to the shaker rod to get data of force exerted, and the accelerometer sensor is glued over the surface of the beam. Low-amplitude excitations are induced in the beam so that beam failure at resonance frequency can be avoided. (a) Experimental setup of a cantilever beam using force shaker with sensors and an OROS OR35 module; (b) specimen of aluminum alloy plates to be worked as a cantilever beam in the experiment.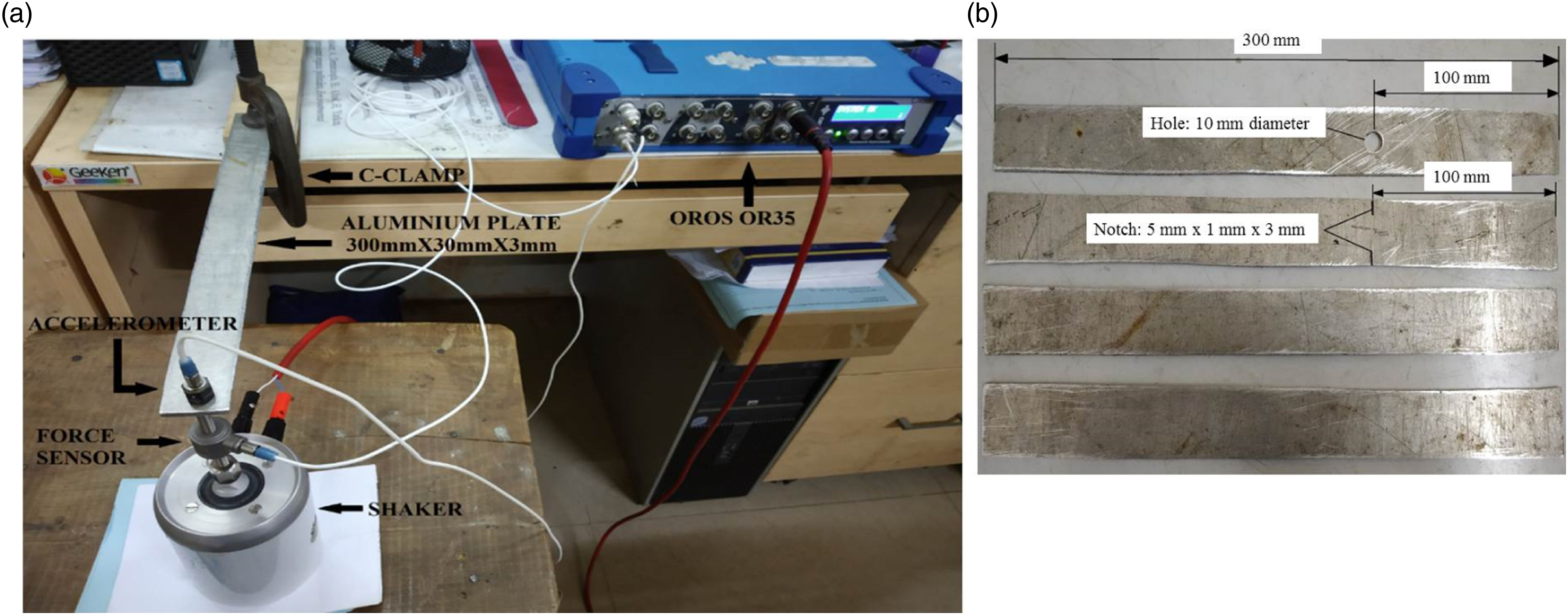
Data collection
The module was connected to a computer, and readings were recorded using NVGate software. A total of 4096 samples per second were being recorded per second. The sampling rate has significant importance for converting the signals from the frequency domain to the time domain. The data were recorded after the Fourier transform being applied to it. Using the advanced sine sweep method, a frequency band of 0–1600 Hz was fixed for this study. In this study, acceleration and force response of a normal cantilever beam with and without faults (notch and hole) were recorded. Two datasets (training and testing) were generated for the model development. The training dataset for three different conditions (beams with no fault, a notch fault, and a hole fault) was generated, whereas the testing dataset was generated for one condition (beams with a hole fault).
The FFT data for acceleration and force signals were recorded separately in a controlled environment for no-fault condition, notch condition, and hole fault condition, as shown in Figure 3(a)–(f), respectively. The FFT data of a testing specimen with a notch fault were also recorded. The FFT signals indicate that there is an increase in the amplitude of the response in a low-frequency range (0–600 Hz) for no-fault condition. FFT signals captured for the cantilever beam: (a) acceleration versus frequency without fault; (b) force versus frequency without fault; (c) acceleration versus frequency with notch fault; (d) force versus frequency with notch fault; (e) acceleration versus frequency with hole fault; (f) force versus frequency with hole fault.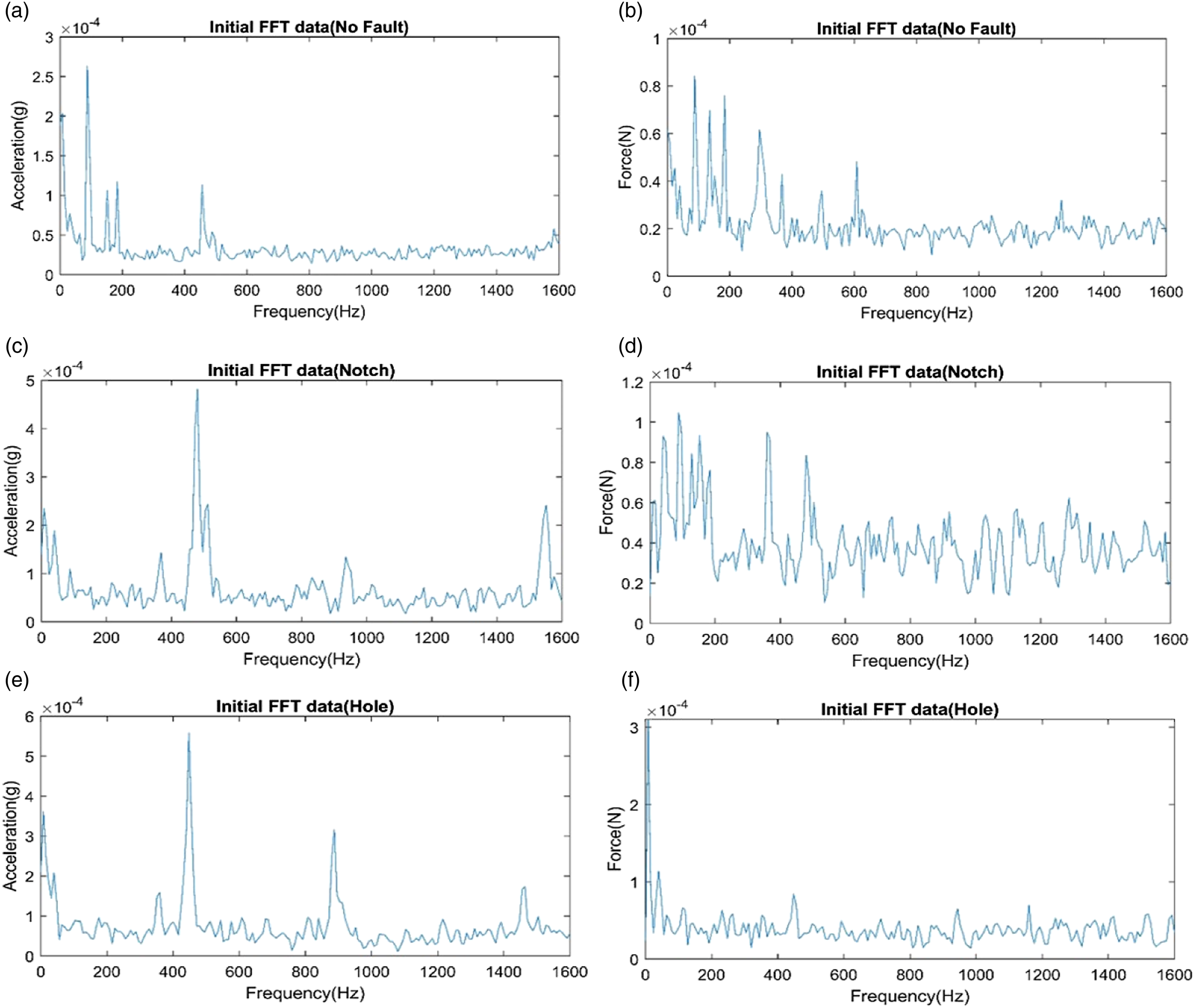
Data processing
De-noising by convolution method
Though the vibration signals were attempted to record in a uniform environmental condition, still some noise may exist in the data. Thus, the FFT data were smoothed using the convolution method to eliminate the Brownian noises of the signals. The convolution method of de-noising can be applied to time-domain signals, and thus the frequency-domain signals were converted into time-domain signals using the inverse fast Fourier transform (IFFT). A total of 201 samples were recorded in each case. The time points for each sample were determined from the sampling rate to derive the IFFT function. The characteristics of the IFFT signals corresponding to no-fault condition, notch condition, and hole fault condition are shown in Figure 4(a)–(f), respectively. The amplitude peaks in different time for no-fault conditions do not exhibit any unique characteristics. But, the acceleration amplitudes exhibit higher peaks at the start and end time for both the notch fault and hole fault conditions. IFFT of FFT signals for the cantilever beam: (a) acceleration versus frequency without fault; (b) force versus frequency without fault; (c) acceleration versus frequency with notch fault; (d) force versus frequency with notch fault; (e) acceleration versus frequency with hole fault; (f) force versus frequency with hole fault.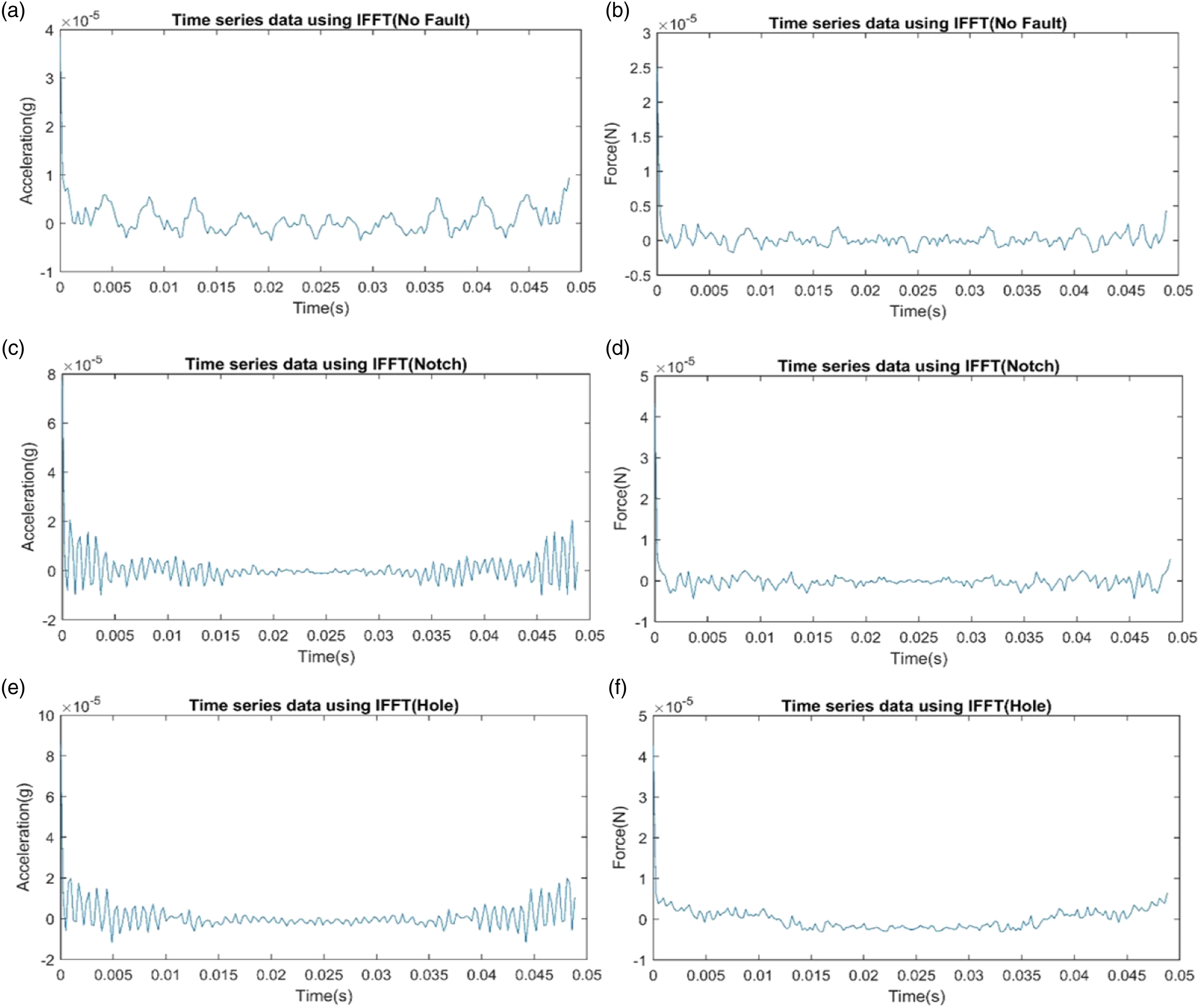
A Gaussian kernel was used in the convolution method for noise removal. The Gaussian kernel spread is dependent on the parameter k, as shown in equation (1). Hence, the extent of smoothening is directly proportional to the value of k

The Gaussian vector is varying from – k to k, and the level of smoothness depends on the value of k. In this study, the parameter “k” of the convolution kernel was set to 1 for each case; therefore, the convolution vector varies from −1 to 1 and follows the trend of the original signal. The characteristics of the de-noising signals in both time domain (orange line) and frequency domain (black line) corresponding to the IFFT signal (blue line) for three fault conditions are shown in Figure 5(a)–(c), respectively. Figure 5(a)–(c) clearly indicates that convolution in the frequency domain follows the original signal trend much more than convolution in the time domain. De-noised acceleration signal: (a) no-fault cantilever beam; (b) notch fault cantilever beam; (c) hole fault cantilever beam.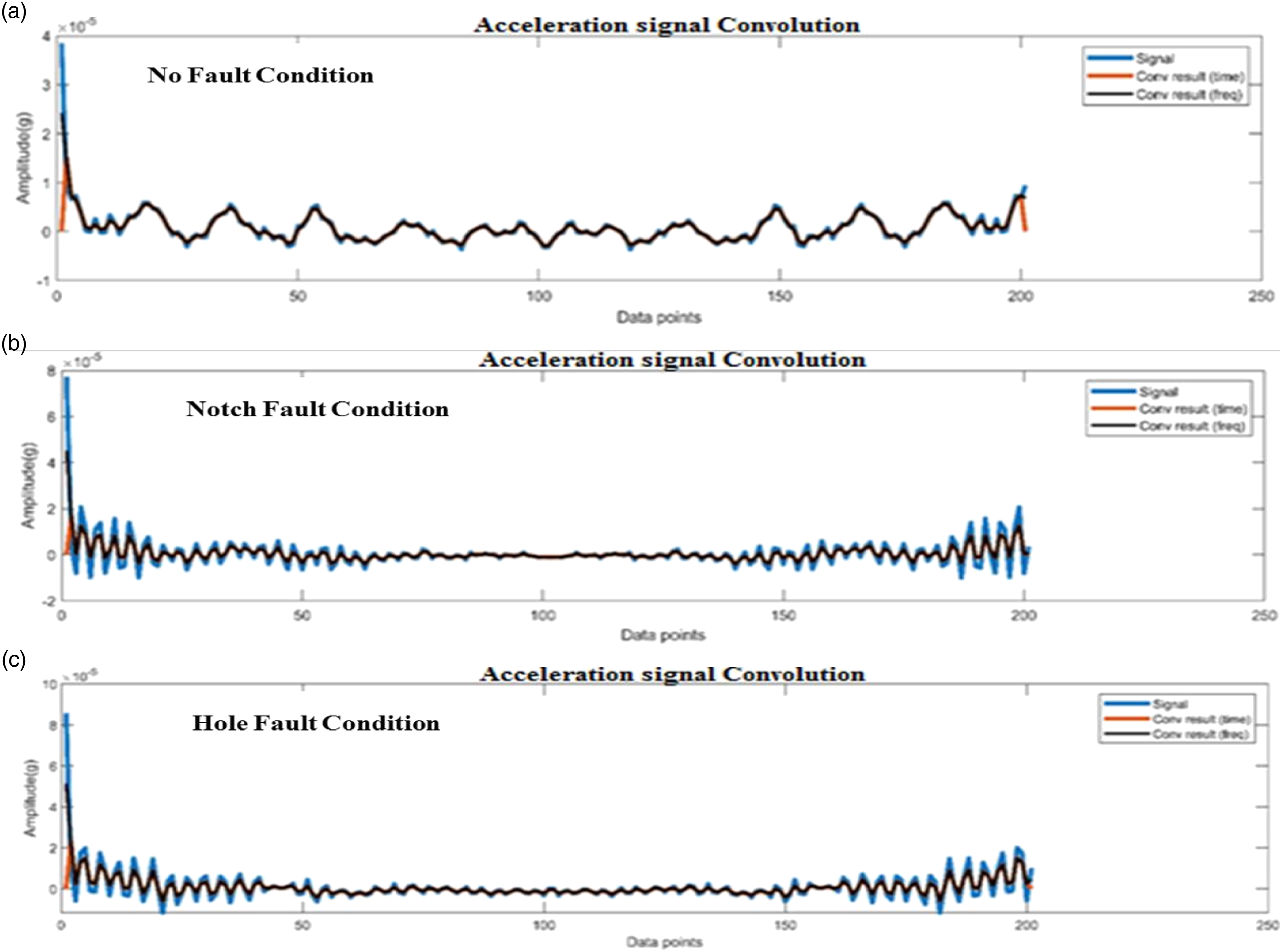
Using the same procedure and functions, force amplitude signals were de-noised using the convolution method. The kernel parameter was also taken the same because of the same input conditions. After signal correction, the next step is to find the signal quality, that is, high- and low-frequency content of a signal. The reason behind finding signal quality is that a signal behavior in a particular frequency band is a unique property, which differentiates it from other signals of the same category. These features were used for training the machine learning model.
Features extraction
Discrete wavelet transform coefficients of an acceleration amplitude de-noised signal.
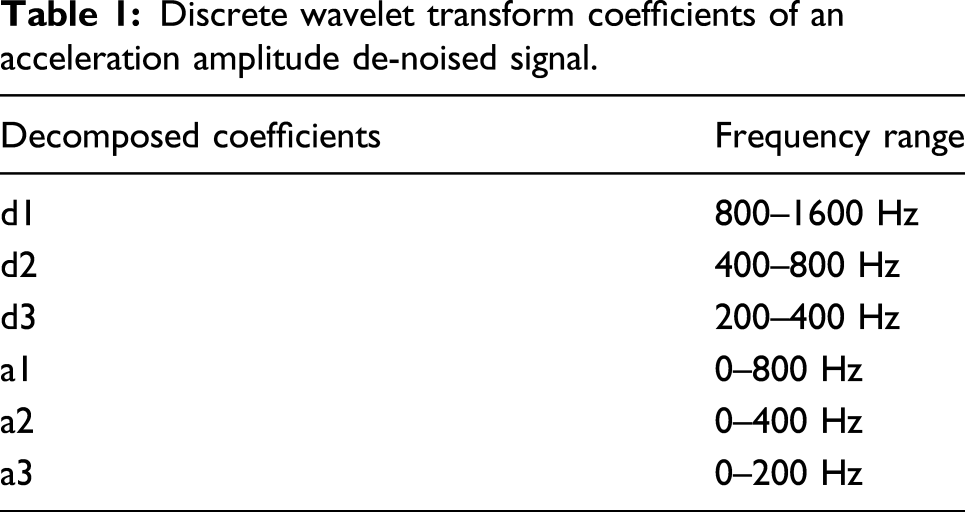
The result from de-noising showed that the frequency-domain convoluted signal follows the trend of the original signal more closely than the time-domain convoluted signal. Thus, a frequency-domain convoluted signal was considered for DWT. Signals used for the wavelet decomposition process are in the time domain; therefore, the coefficients after decomposition are also in time domain. The decomposed signal of de-noised acceleration signals corresponding to the no-fault condition is shown in Figure 6. In a similar way, all other signals were decomposed. Detailed and approximate coefficients of the acceleration signal of a cantilever beam without fault.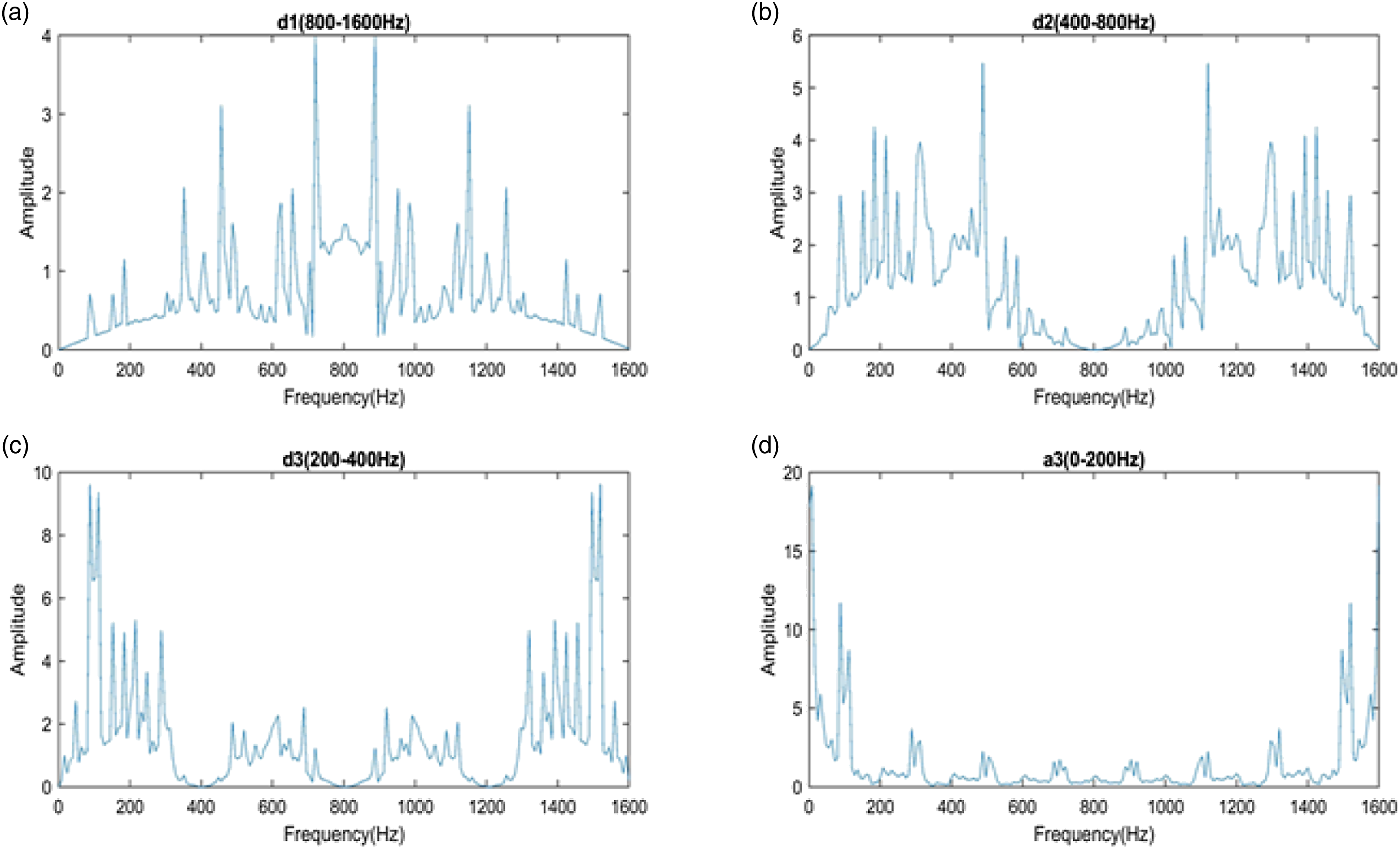
Development of ANN-based machine learning model
After extracting features from signals in time domain using wavelet decomposition, all the extracted coefficients were used as input in the ANN model. The benefit of using FFT is that all the data have positive amplitude and thus help in peak analysis. The amplitude of decomposition coefficient data was found to be in the order of 10−5. In order to use these data for neural network training, a scaling factor of Architecture of neural network model.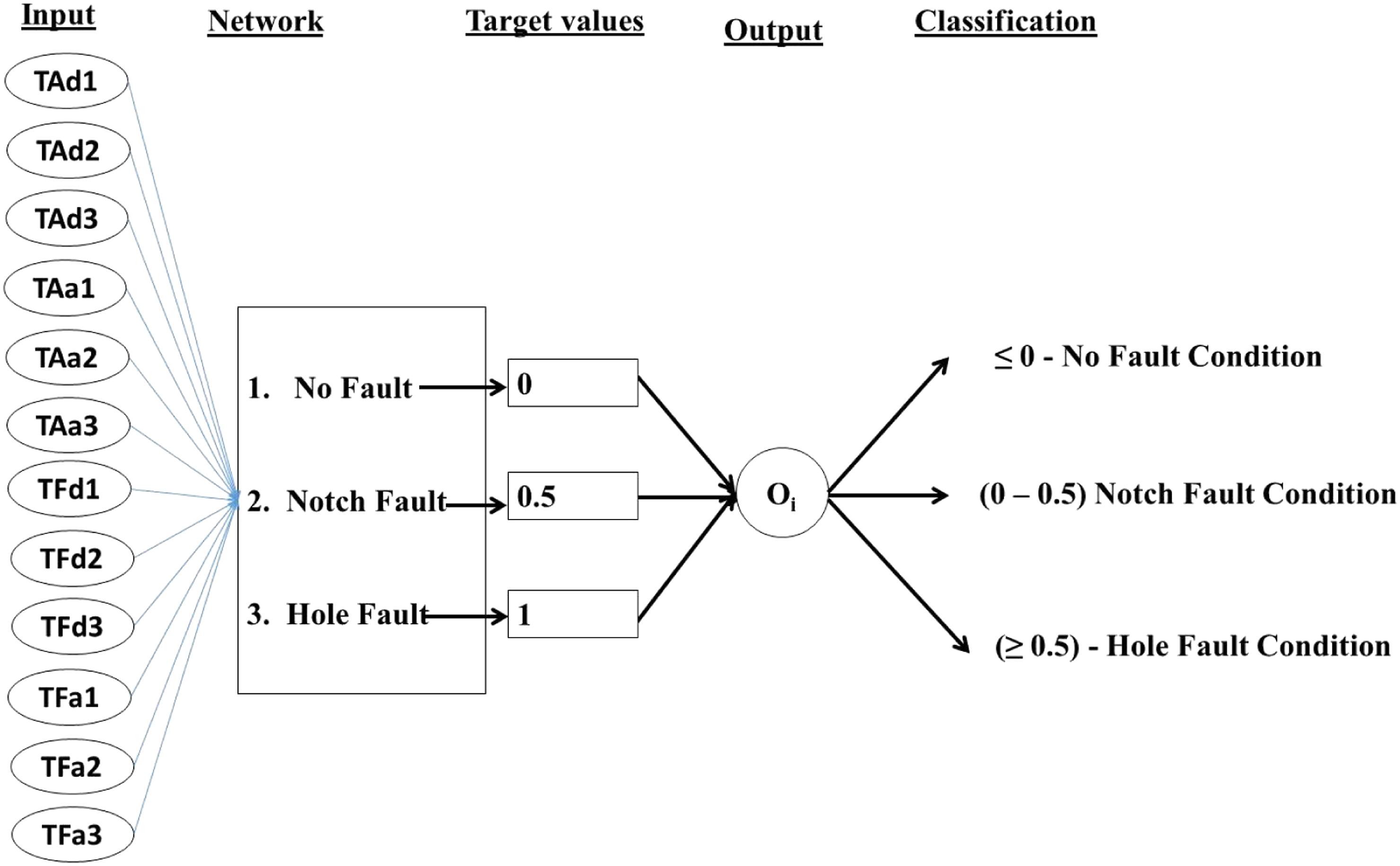
A total of 12 inputs derived from force and acceleration vibration signals (six coefficients—three detailed coefficients and three approximate coefficients) were used in the model with three targets, namely, 0, 0.5, and 1 corresponding to no fault, notch fault, and hole fault. The number of training and testing datasets used in the model was 603 (201 each for three fault conditions) and 201 (hole fault condition), respectively. The supervised training method (Levenberg–Marquardt backpropagation) was used to train the model.
Service life prediction
The study predicts the service life of the beam based on the characteristics of the vibration signal in the frequency range of 0–1600 Hz. For this purpose, the final processed signal with high-frequency content was used. The peak analysis was done over this high-frequency content signal to extract peaks and to fit a distribution so that characteristics of the signal can be found, such as spread, amplitude, and variation.
Peaks and their corresponding frequencies.

Note: ANF: acceleration signal for no fault; AN: acceleration signal for notch fault; AH: acceleration signal for hole fault: ANFlocs: frequency of corresponding acceleration signal for no fault; ANlocs: frequency of corresponding acceleration signal for notch fault; AHlocs: frequency of corresponding acceleration signal for hole fault.
The detailed coefficient Curve fitting plots of detailed coefficient 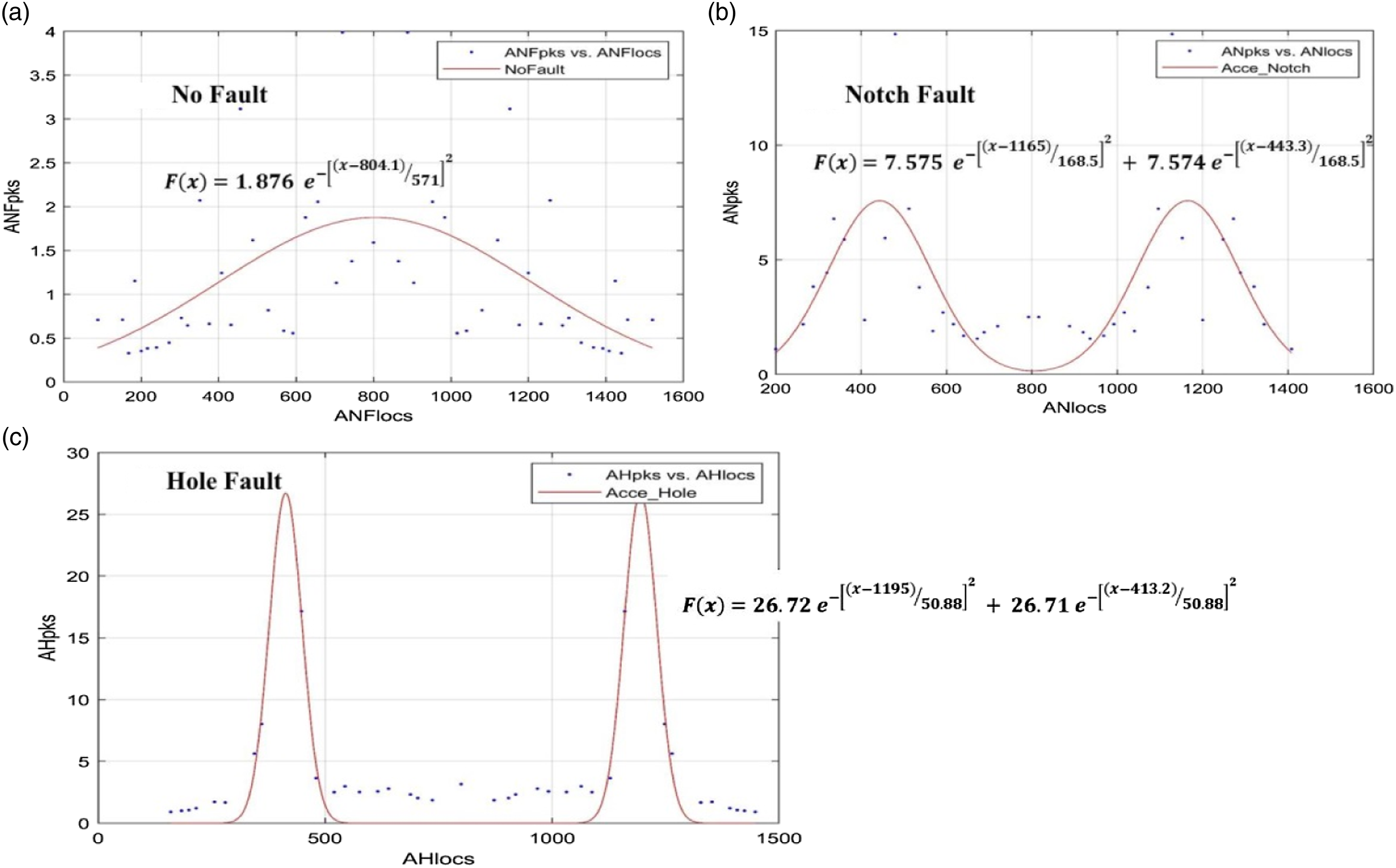
Results and discussion
The objectives of the study are to formulate a mechanism for prediction of fault types in a cantilever beam using the ANN model and estimating the remaining service life. The study has been carried out in multiple stages from experimental setup, specimen selection, model development, and model validation. The study used aluminum alloy as a specimen. The faults of various types (hole fault and notch fault) were induced in the different samples at typical locations for taking the observations of vibration signals in varying conditions of the samples. The vibration signals (force and acceleration) were monitored in terms of amplitude versus frequency for each case such as no-fault, notch fault, and hole fault conditions for generation of training dataset. The vibration signals of a test sample with hole fault condition were also monitored for estimating the prediction accuracy.
The observed FFT acceleration signals from the experimental setup were examined for analyzing the effects of fault on the signal’s peak to identify the frequency level of peaks. The observed data were converted into the time-domain signal for further analysis. These time-domain force and acceleration signals were processed using the convolution filter for removal of Brownian noise in both the time and frequency domains. The de-noised signals were further processed using DWT for the extraction of features, where signals for each case were decomposed to high-frequency and low-frequency content components. The feature with high-frequency quality, that is, detailed coefficient (d1) of the acceleration signal, was used for peak analysis. The distribution of the signal peak points was used for curve fitting. A Gaussian curve was fitted for each case, and the constants of the Gaussian curve were estimated. The amplitude and spread of curve help in estimating service life for each case. The curve fitting results indicated that the span and amplitude of the fitted curve are different for different faulty conditions. The results further revealed that mean and standard deviation for the hole fault condition are nearly half of the spread of the notch fault condition and one-fourth of the no-fault condition. This indicates that the life of the beam with no-fault condition has double the life of notch fault condition and four times the life of hole fault condition.
A feed-forward neural network was designed and trained using a Levenberg–Marquardt backpropagation training function. The network performances were examined with a different number of neurons for identifying the optimum one. It was found that the ANN model with seven neurons performs with a maximum accuracy, and the trend of prediction is shown in Figure 9. The output of the neural network model tells the types of fault. Model prediction results for the testing dataset of hole fault cantilever beam.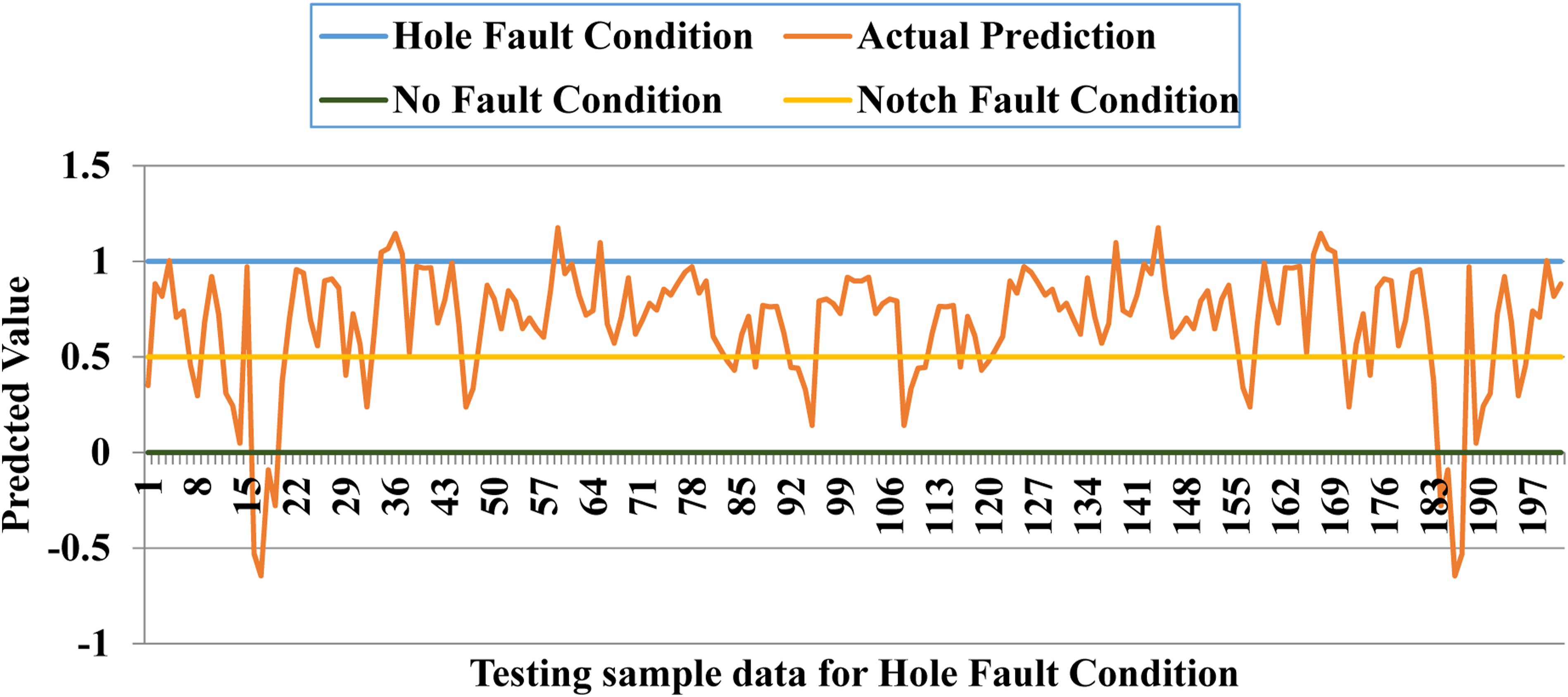
The model was trained with three target outputs (0, 0.5, and 1), respectively, for no-fault, notch fault, and hole fault conditions. The testing sample used in the study has hole fault condition, and thus the target output of the testing data was 0.5. But, the severity of the fault condition may not be similar, and thus a range of predicted values were considered to be acceptable to indicate the existence of fault. In this study, it was assumed that the output range of less than and equal to zero indicates no-fault condition, 0 to 0.5 indicates a notch fault condition, and greater than 0.5 indicates a hole fault condition. The testing dataset used is of a hole fault, so all the network outputs falling in the range of ≥0.5 are to be considered in the acceptable range of prediction. It was observed that the prediction level in 158 cases is in the acceptable region (>0.5), and the prediction level in the rest of 43 cases is in the unacceptable region (≤0.5). That is, the model successfully predicts the hole fault condition in 158 cases (=78.6%) out of the total 201 data points.
Conclusions
The current study aims to formulate a machine learning model for early detection of faults in a cantilever beam using the vibration signal data. The early detection of a fault helps in sudden failure of the beam. The vibration signal data indicate that the natural frequency of the beam changes with the development of faults such as cracks or holes when subjected to dynamic loading conditions. The signal peak analysis results indicated that the natural frequency of a cantilever beam depends on multiple factors such as size and location of the fault.
The study used de-noised vibration signal data of three types of samples (no fault, notch fault, and hole fault) for development of the ANN model. A frequency-domain convolution method was used to correct the signal data. The de-noised signals were decomposed into three-level Haar wavelet decomposition to obtain four coefficients (three detailed coefficients and one approximate coefficient). All these features were used for training of the neural network. A total of twelve inputs, four for each type of beam condition, were used for training the feed-forward neural network using a Levenberg–Marquardt backpropagation training function. A total of 603 samples data (201 samples for each condition) were used for training of the network. The performance of the model was tested with 201 samples of a hole fault cantilever beam. The testing dataset showed the model can predict the fault condition with 78.6% accuracy. The study has many limitations, and thus followings are identified as the future scope of the work: Precision in material dimension is very important in the signal characteristics, and thus each specimen needs to be machined using a computer numerical control before monitoring of vibration signals. More number of vibration signal data need to be used in the model for obtaining the better prediction accuracy. That is, vibration signals of beams for different fault conditions such as location and size of faults are needed as an input for better training.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.