
Abstract
This study systematically analyzes the influence mechanism of high-order wheel polygon (20th order) on the dynamic response of high-speed wheel-rail system, which is relatively under-attended in the existing studies (compared with the common 12th order and lower polygons). By establishing a rigid-flexible coupled vehicle-rail dynamics model, we focus on the wheel-rail force fluctuation characteristics and body vibration law of the 20th-order polygon at different amplitudes under the working condition of 350-400 km/h. The time-frequency domain analysis shows that the 20th-order polygon has a significant influence on the dynamic response of high-speed wheel-rail system. The time-frequency domain analysis shows that the 20th-order polygon excites the high-frequency vibration of the wheelsets (60-84 Hz band), which leads to a significant increase in the dynamic amplitude of the vertical wheel-rail force and triggers the phenomenon of track jumping (the peak value of the vertical acceleration of the wheelsets reaches 89 m/s2). It is shown that the wheel-rail force fluctuations induced by the 20th-order polygon are enhanced by about 42% compared with the 12th-order condition when the vehicle speed is increased to 400 km/h, and at the same time, a flexible mode resonance of the vehicle body is induced, which is a phenomenon less frequently discussed in the existing studies on low-order polygons. The coupled velocity-order-amplitude influence law is proposed through parametric analysis, and the results show that the amplitude of the 20th-order polygon needs to be controlled below 0.05 mm in order to effectively avoid the risk of rail jump. This study provides a theoretical reference for the optimization of the maintenance standard of high-speed rail wheel polygons, and suggests a monitoring strategy for high-order polygons.
Introduction
In recent years, the phenomenon of wheel polygonization in high-speed vehicles has exacerbated the impact forces between wheels and rails during operation, posing significant challenges to operational safety and adversely affecting the service life of vehicle components. The underlying causes and potential consequences of wheel polygonization have attracted considerable attention from researchers.
In order to research the effect of polygonal excitation on vehicle operation, Mao et al. 1 formed a rigid-flexible coupled dynamics model of a high-speed vehicle with elastic wheelsets and frames, aiming to provide a reference for the polygonal generation and propagation mechanism as well as inhibition measures. Liu et al. 2 set up a rigid-flexible coupled dynamics model of wheelsets and rails, investigating the relationship between wheel polygonal abrasion and the dynamic characteristics of the wheel-rail system at different speeds. Liu et al. 3 established a rigid-flexible coupled dynamics model of a locomotive, wheelsets, and rail components, analyzing the influence of wheel polygon order, amplitude, operating speed, and other related factors on the wheel-rail force and vibration response.
For understanding the relationship between operating speed and wheel-rail force, Liu et al. 4 derived that the effect of wheel out-of-roundness on the vehicle system was related to wheelset vibration by means of a vehicle-track coupled dynamics model. Chen et al. 5 concluded that wheel polygonal abrasion caused the vehicle to vibrate and affected the smoothness and comfort of operation. Zhang et al. 6 established a vehicle rigid-flexible coupling model and found that the wheel polygon caused higher vibration of the axle box, which was closely related to the order of the wheel polygon.
Due to the increase in vehicle speed, wheel polygon wear problems occurred frequently. Cai 7 researched and concluded that the order of the wheel polygon was inversely proportional to the speed. Cui et al. 8 concluded that the influence of wheel-rail force fluctuation was more obvious due to the main frequency separation phenomenon by establishing a rigid-flexible coupling model. Guo 9 established a wheel polygon wear prediction model and conducted research on the limiting value of the wheel polygon.
In order to investigate the formation causes of wheel polygonal wear, Wu et al. 10 proposed wheel polygonal wear inhibition measures through variable speed operation and strict control of initial wheel-rail surface irregularities by means of a wheel-rail rolling test bed. Wang 11 conducted research on the effect of dynamic load caused by the wheel polygon.
The damage to the car body components is attributed to the wheel-rail impact induced by polygonal wear. Zhang et al. 6 investigated the influence of wheel polygons on axlebox vibration and concluded that the vibration frequency is correlated with the polygonal order. Yue 12 focused on analyzing vehicle dynamic performance under multiple failure modes. Luo 13 examined the relationship between the severity of wheel out-of-roundness and the vibration characteristics of vehicle components, concluding that high-order wheel out-of-roundness has a pronounced effect on the vibration of the bogie frame. Guan et al. 14 studied the influence of wheel flexibility and the dynamic characteristics of axlebox bearings under the effect of wheel polygonal wear. Zheng 15 analyzed the vehicle dynamic performance of a flexible wheelset by employing a rigid-flexible coupled vehicle model. Guo 16 compared the differences in dynamic behavior between rigid and flexible body models, concluding that the vibration response of the rigid-flexible coupled model is more pronounced under external excitations. Qi 17 investigated the impact of wheel polygons on vehicle dynamics and analyzed the vibration response induced by polygonal wear. Wu et al. 18 examined the influence of wheel polygonization on the dynamic response of the vehicle and found that the high acceleration and dynamic stress observed in higher-order wheel polygons and axleboxes result from high-frequency resonance. Peng et al. 19 conducted a comparative study on the applicability of existing wear models for simulating wheel polygonization in railway systems.
To investigate the influence of wheel polygons on vibration and wheel-rail interaction forces, a rigid-flexible coupled dynamic model of the vehicle is established. The dynamic response of the system under wheel polygon excitation is analyzed in both time and frequency domains by adjusting the polygon order, amplitude, vehicle speed, and other parameters.
Establishment of the vehicle model
The simulation of the actual car body operation is conducted using software, and the car body modeling is implemented based on dynamics and vibration theory.
Mathematical model of wheel polygonal wear
For the mathematical model of the wheel, as shown in Figure 1, the periodic polygonal wear of the wheel is simulated using a harmonic function, expressed as: Schematic of the periodicity of the wheel polygon.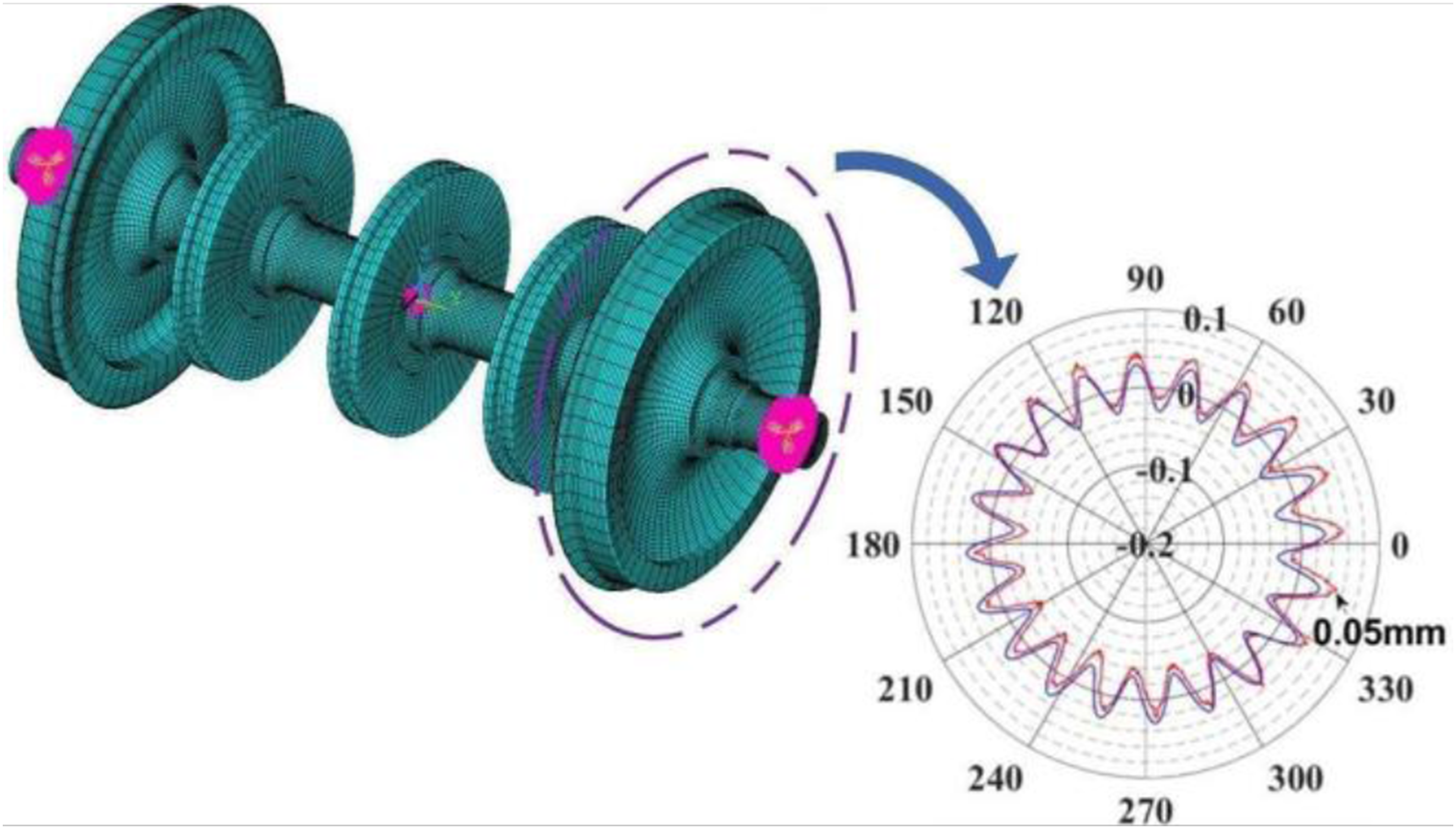

The modal characteristics of the wheel are closely related to perimeter and frequency. The different wavelengths of wheel polygonization are defined as follows:

λ n represents the wheel polygon wavelength, R is the radius of the wheel rolling circle, and n denotes the order of the wheel polygon.
The vibration frequency of the wheel-rail system is given by the following formula:

Wheel polygonal deformation dynamic model
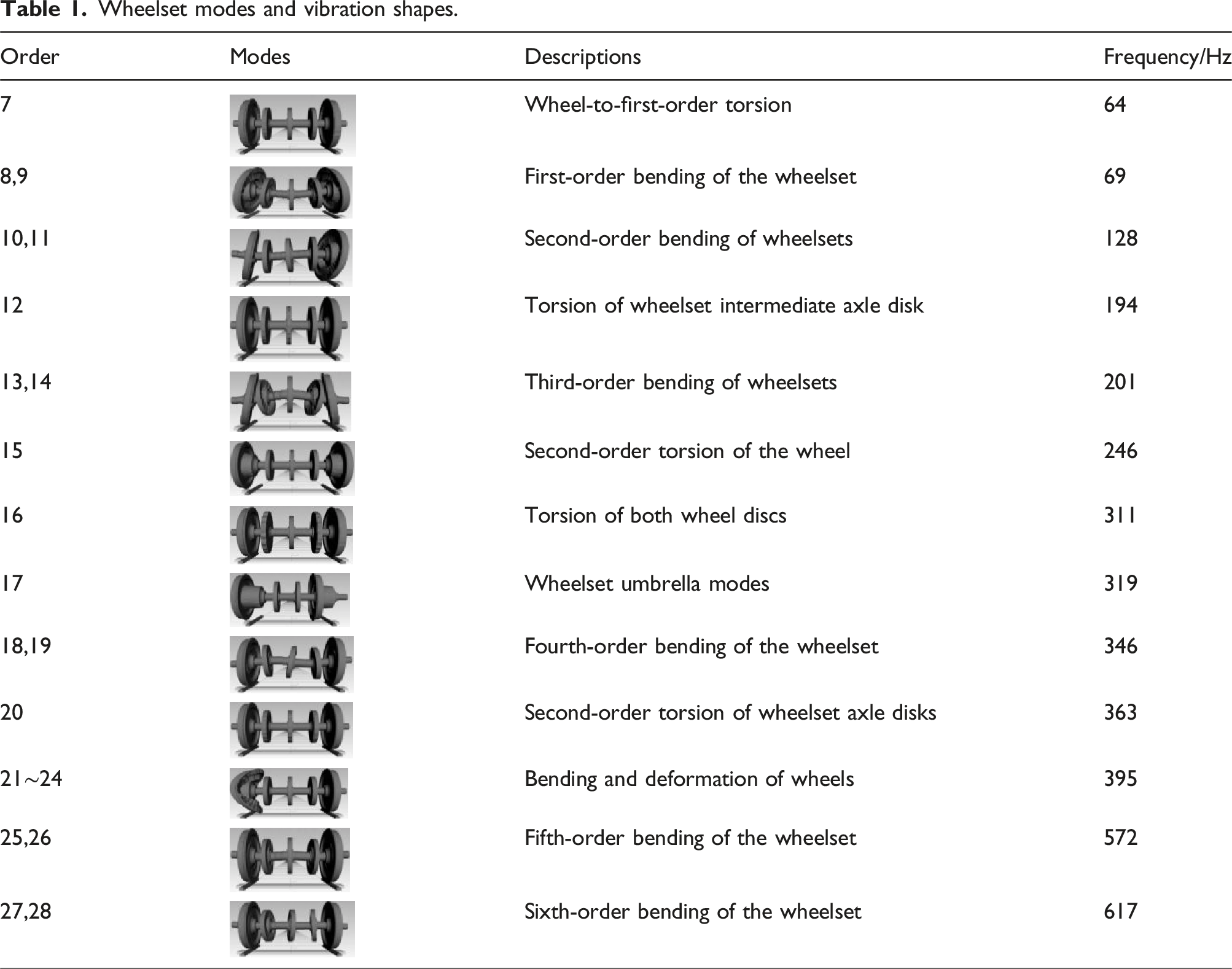
Wheelset modes and vibration shapes.
The model consists of the car body, two bogies, four wheelsets, and one or two series of suspensions, as shown in Figure 2. Vehicle structure diagram.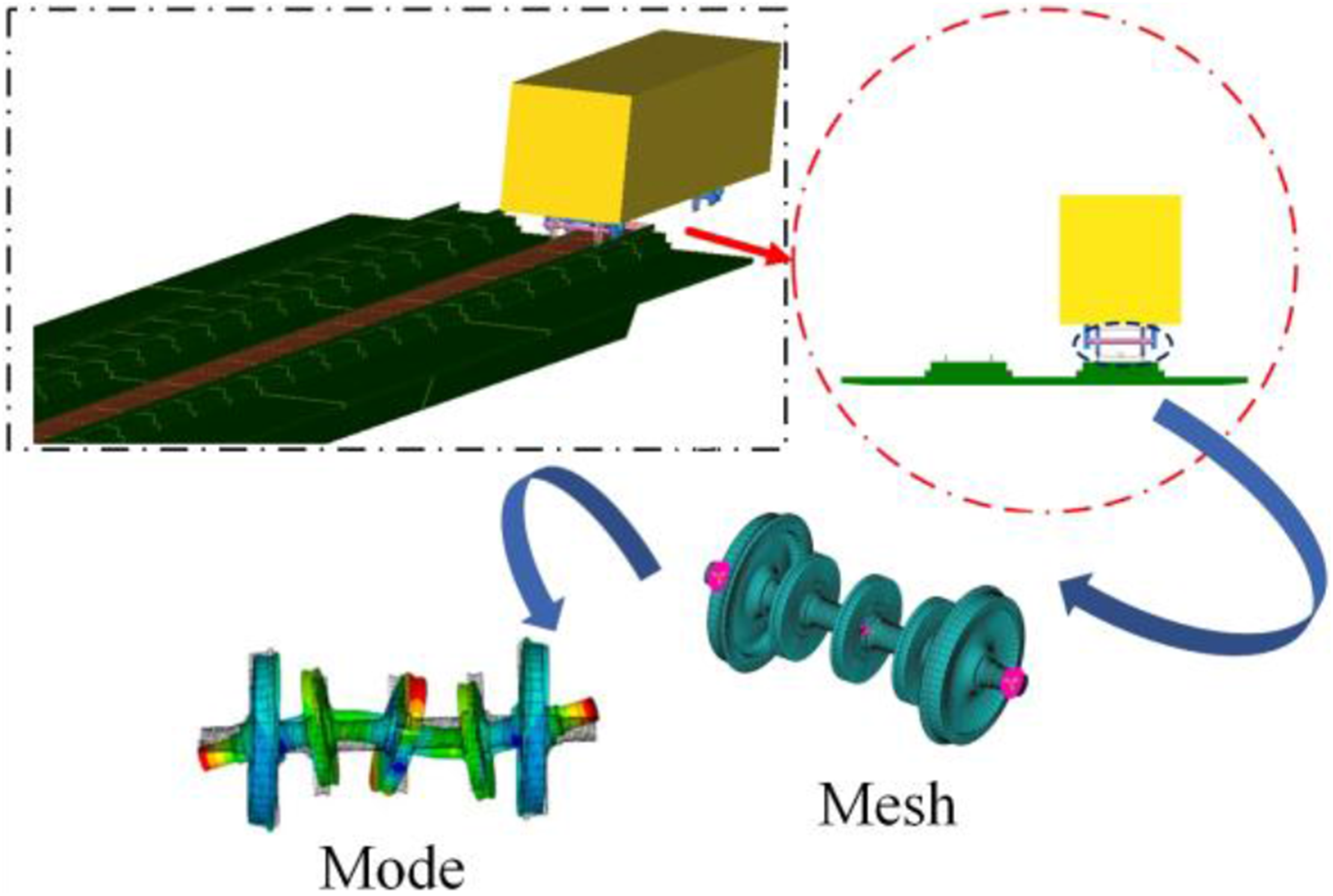
By analyzing wheel out-of-roundness, the factors influencing wheel polygon formation are identified. Mathematical models and dynamic simulation models are developed based on the motion characteristics of the vehicle. The wheel polygon mathematical model and dynamic software settings are outlined.
Model validation
The accuracy of the kinetic model is very important and is a prerequisite for performing the calculations of the various kinetic indicators. Therefore the simulation model has to be validated. The validation of the simulation-derived car body acceleration in the time and frequency domains, respectively, by detecting the high and low track irregularities of the car as an output excitation.
As can be seen from Figure 3, the waveform characteristics and fluctuation ranges of the car body vertical vibration acceleration in the time and frequency domains obtained from the simulation calculation are basically consistent with the car body vertical vibration acceleration time and frequency domain responses presented in the model validation part of the model in Yue.
12
Time and frequency curves of vertical acceleration of the car body: (a) time domain curve (b) frequency domain curve.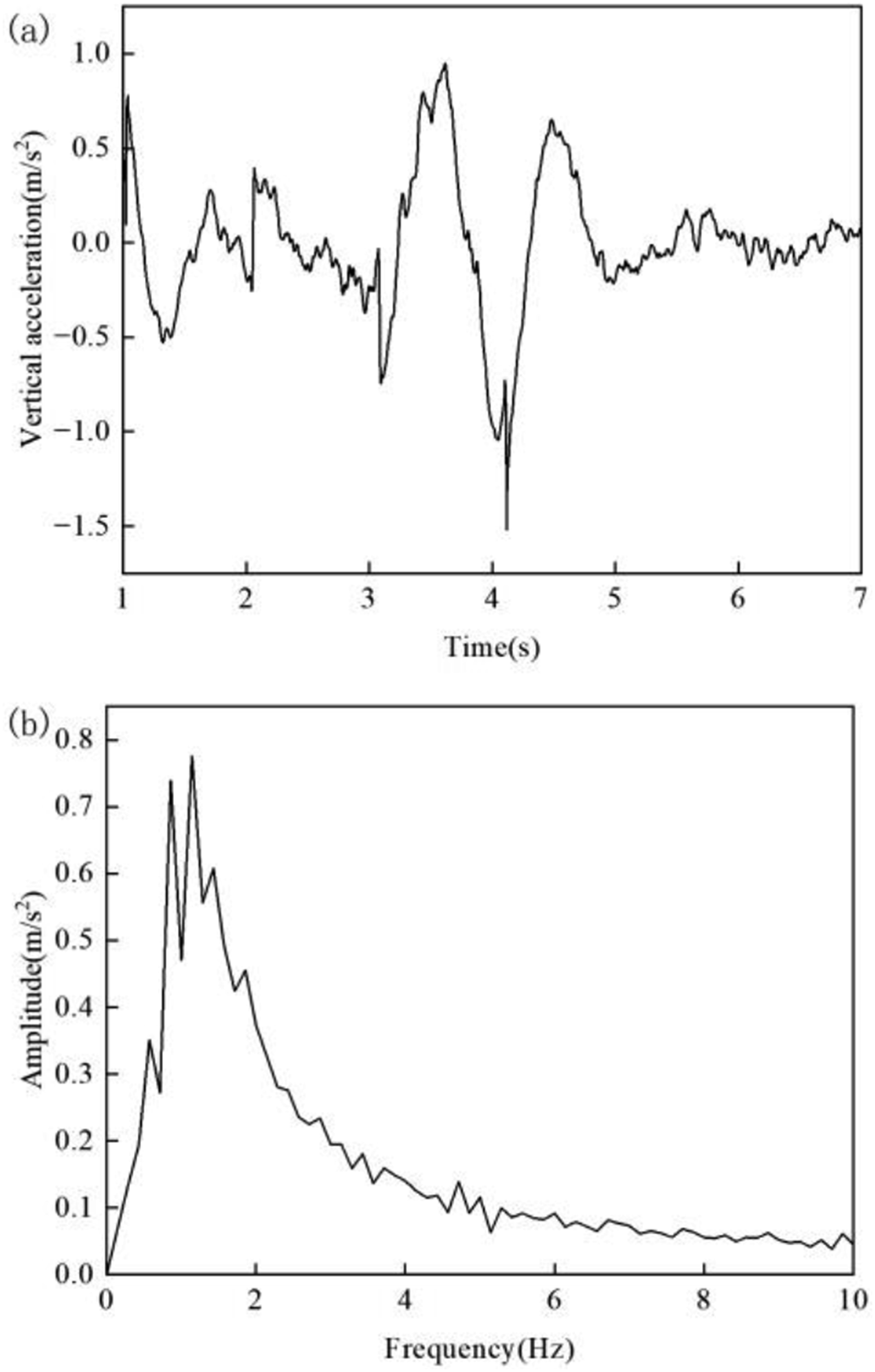
The influence of 20th order polygonization of vehicle wheelsets on vibration and wheel-rail forces
The influence of high-order wheel polygons (20th order) on vehicle vibration and wheel-rail forces is investigated. The Beijing-Tianjin line track is used as an excitation, simulations are conducted for different speed cases to explore the impact of higher-order polygons on vehicle vibration acceleration and wheel-rail forces.
The impact of speed on vibrations and wheel-rail forces under the 20th-order wheel polygonal wear
The influence of the vehicle with an amplitude of 0.1, a polygon order of 20, and varying speeds (50 km/h, 100 km/h, 150 km/h, 200 km/h, 250 km/h, 300 km/h, and 350 km/h) is investigated.20–25
Figure 4 shows that the vertical acceleration fluctuation increases progressively with the speed. The vertical acceleration reaches its maximum value of 89 m/s2 at 350 km/h. Variation curve of the maximum wheelsets vertical force.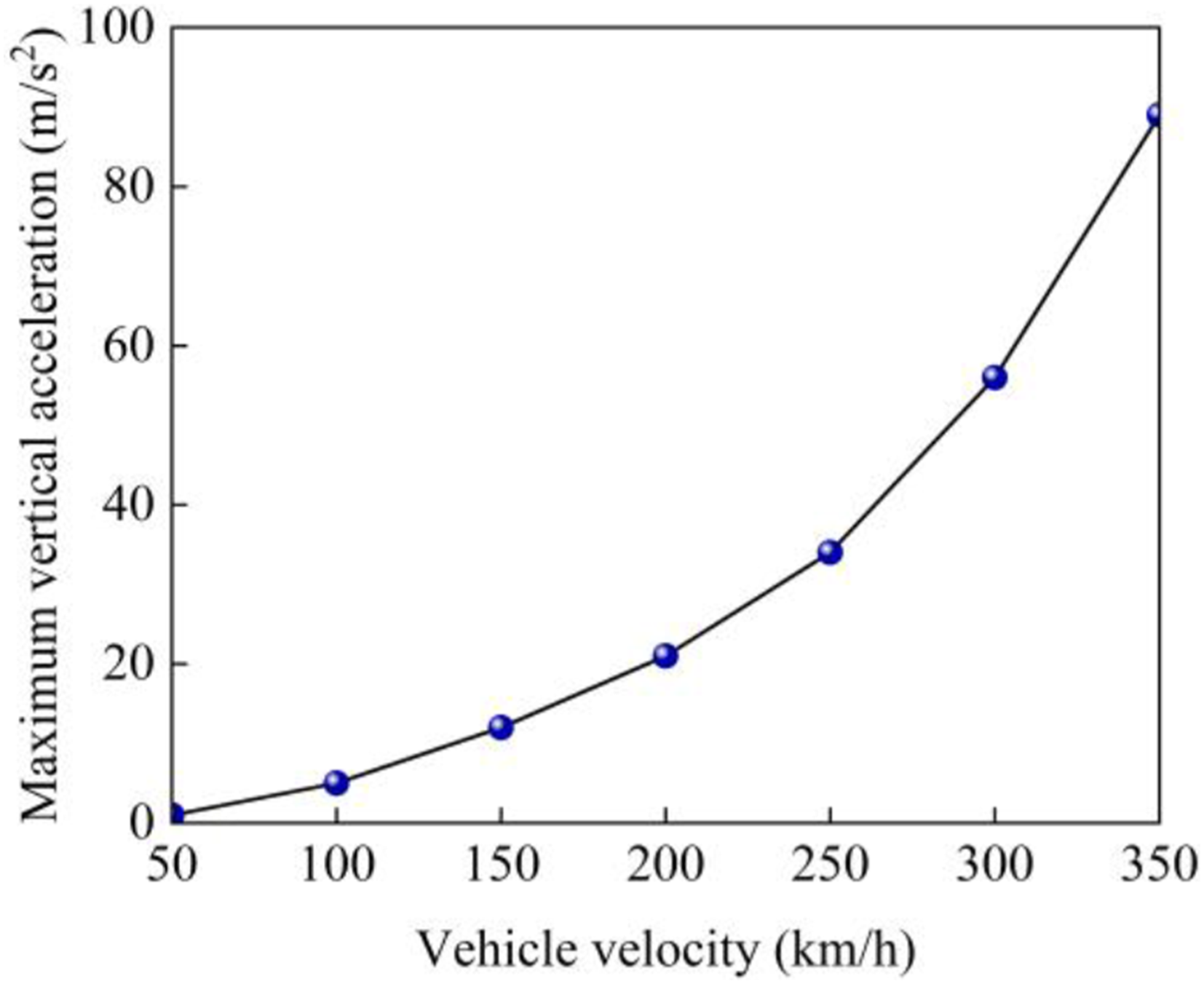
As shown in Figure 5, the vibration frequency resulting from 20th-order polygonal excitation is generated when the vehicle travels at speeds ranging from 50 to 350 km/h. The maximum vertical vibration acceleration due to the speed with 350 km/h and 20th-order polygonal excitation is 51 m/s2. Spectrogram of wheelsets vertical acceleration.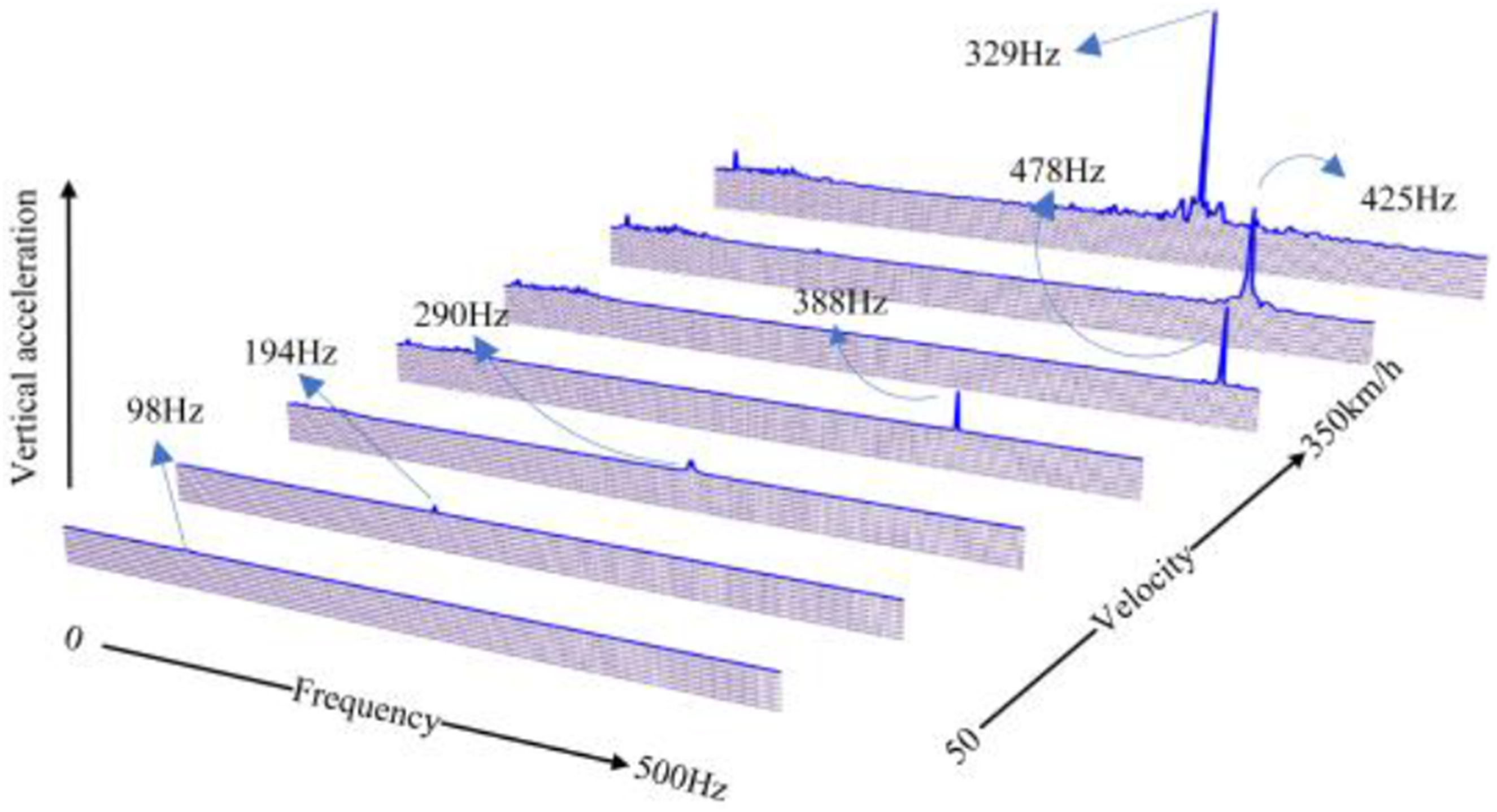
As shown in Figure 6(a), the vertical acceleration fluctuation of the bogie gradually increases with speed. The increase is relatively smooth compared to the vertical acceleration of the wheelsets. From Figure 6(b), it can be observed that the vertical acceleration of the frame at mid and high frequencies is significantly reduced compared to that of the wheelsets, and the impact of the vibration caused by 20th-order polygonal excitation on the frame is smaller. Time and frequency curves of vertical acceleration of the frame: (a) time domain curve (b) frequency domain curve.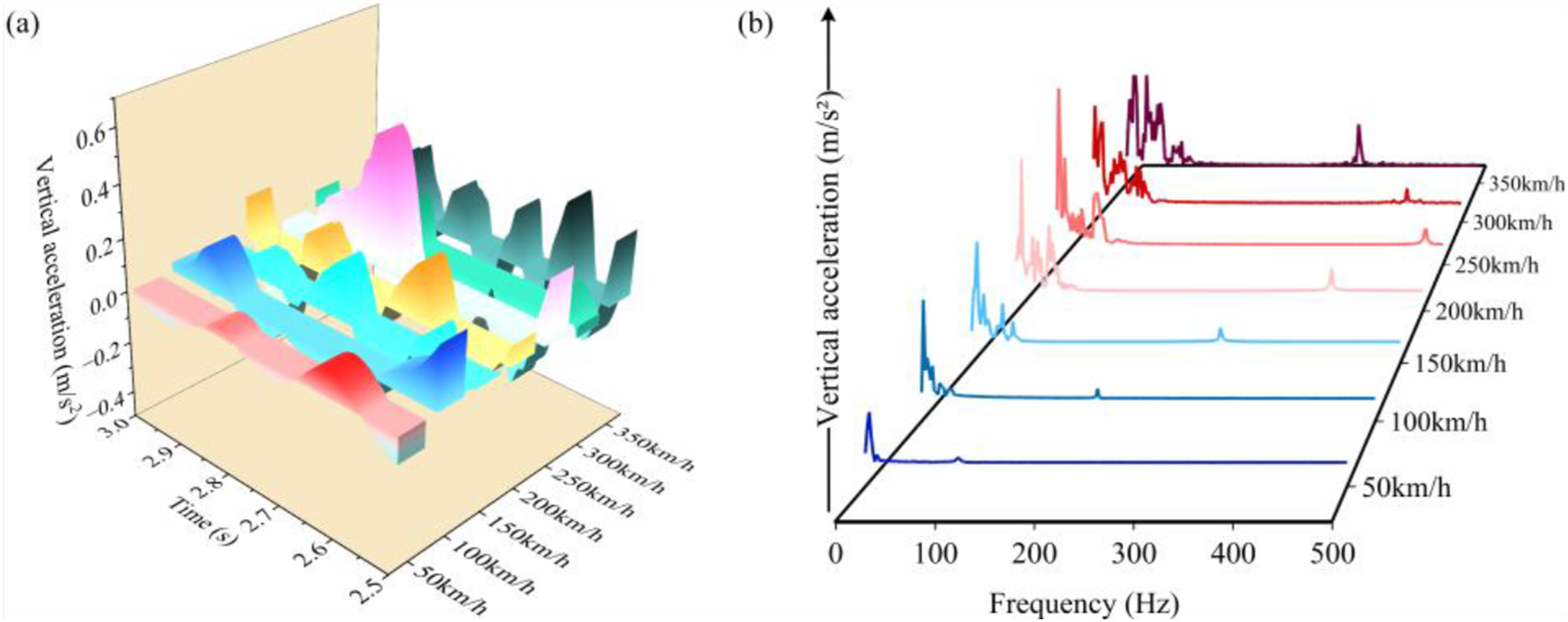
The vertical acceleration ranges from −0.2 m/s2 to 0.2 m/s2 for all speeds from 50 to 250 km/h. When the speed exceeds 250 km/h, the acceleration magnitude exceeds 0.2 m/s2, as shown in Figure 7(a). From Figure 7(b), it can be observed that the frequency of vertical acceleration of the car body is primarily concentrated within 50 Hz. The values of vibration acceleration at mid and high frequencies are close to zero. Car body vertical acceleration time and frequency curves: (a) time domain curve (b) frequency domain curve.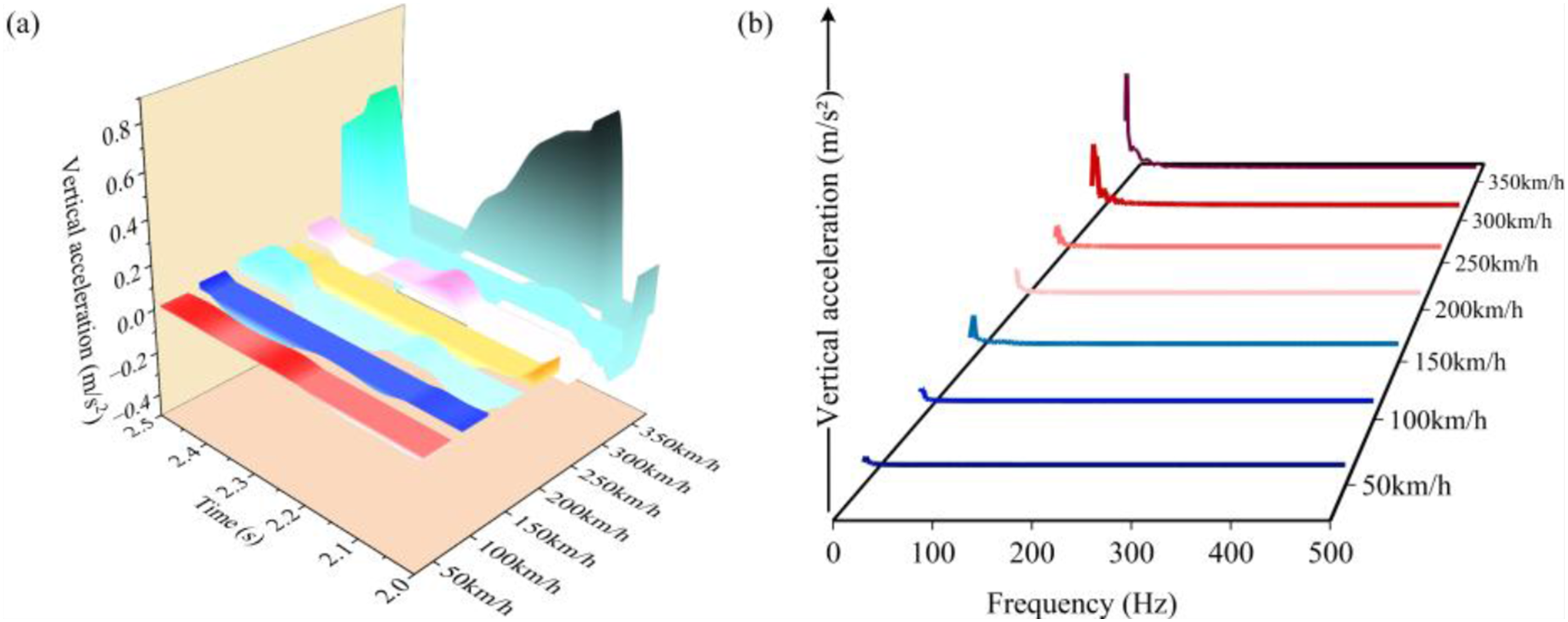
As shown in Figure 8, the force remains negligible at speeds below 150 km/h. After exceeding 150 km/h, the force fluctuation gradually increases, reaching its maximum at 350 km/h. The maximum vertical force on the wheelset at a velocity of 350 km/h is 85 kN, and the minimum value is 0 kN. Operating the vehicle at speeds of 250 km/h, 300 km/h, and 350 km/h poses a higher risk.
26
Time Domain and Extreme Value Curves of Vertical Wheel-Rail Force: (a) time domain curve (b) curves of maximum and minimum.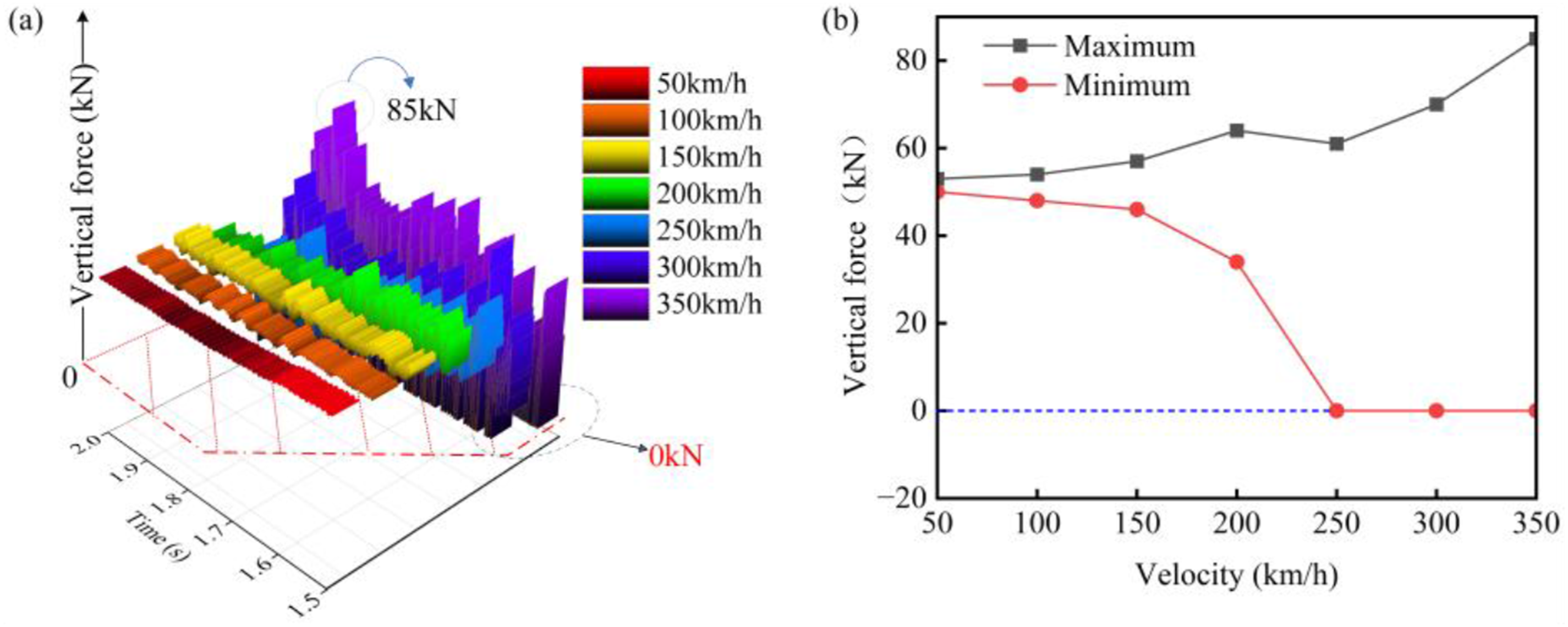
The impact of the 20th-order wheelset polygonal amplitude on wheel-rail forces
As shown in Figure 9(a), with the increase in speed range, the maximum vertical wheel-rail force exhibits an overall increasing trend, while the minimum value of the vertical force shows a decreasing trend. The minimum values corresponding to amplitude values of 0.01, 0.08, 0.09, and 0.1 are all 0 kN. Maximum and minimum values of vertical wheel forces at different polygonal amplitudes for speed levels of 300 km/h and 350 km/h: (a) 300 km/h (b) 350 km/h.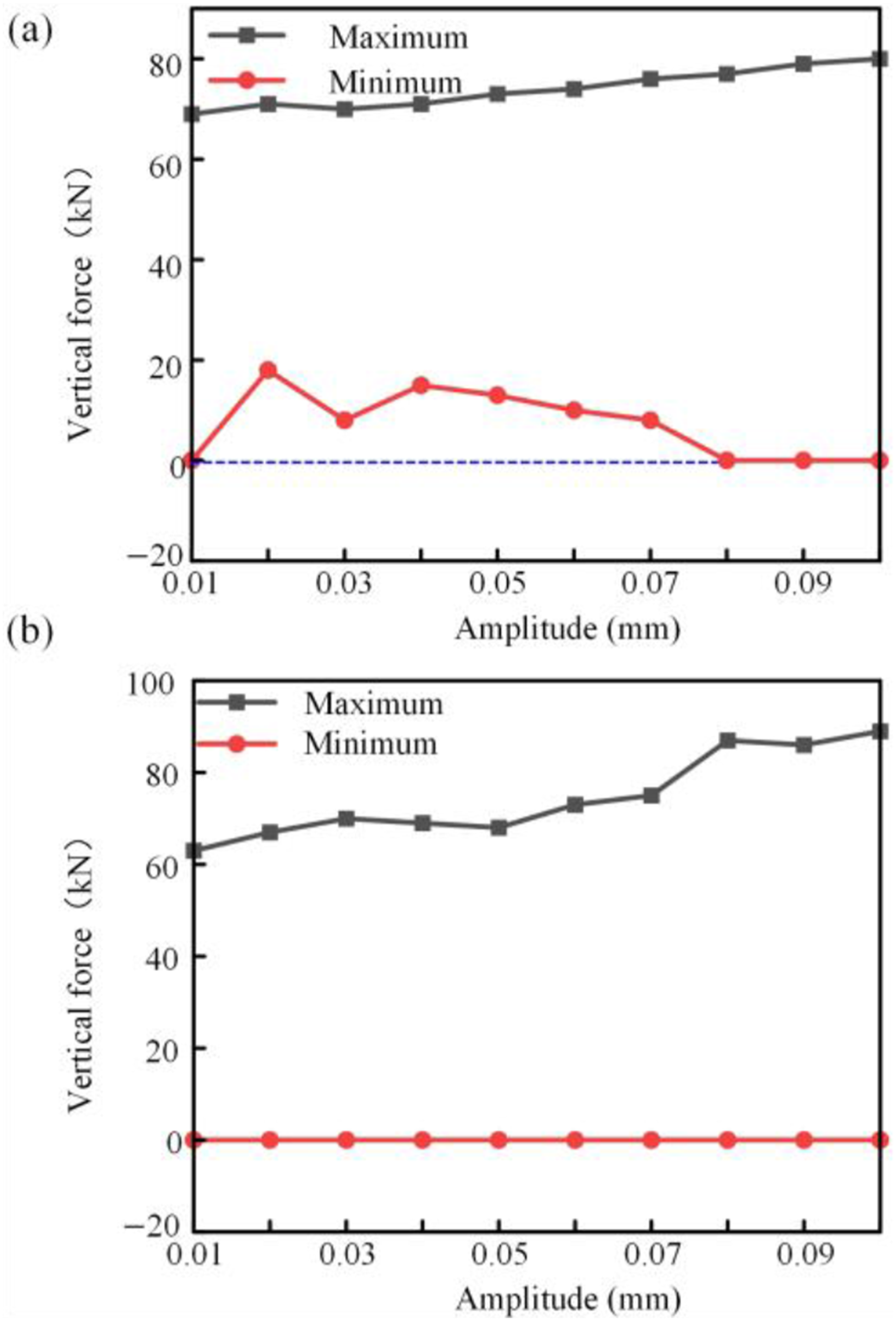
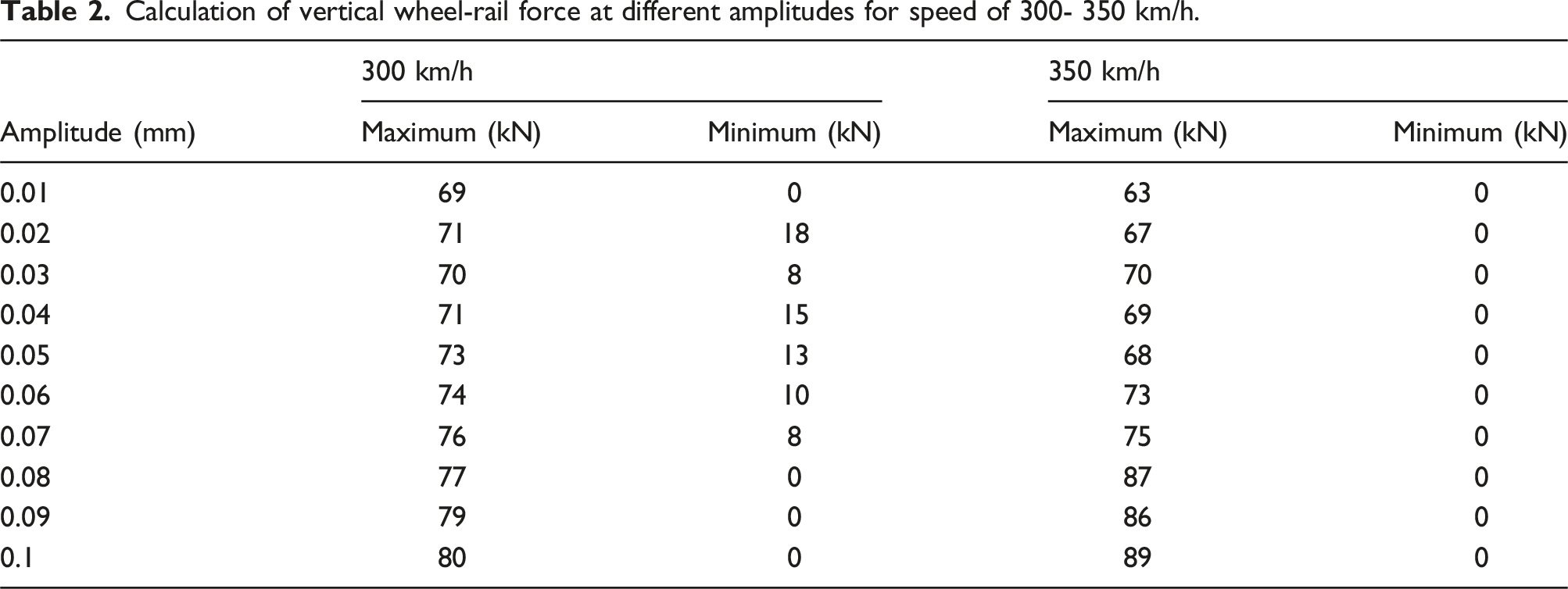
As shown in Figure 9(b), the fluctuation of the wheel-rail vertical force remains relatively unchanged with the increase in polygon magnitude (0.01–0.07). However, when the magnitude increases to 0.08–0.1, the fluctuation of the wheel-rail vertical force becomes more pronounced. At an amplitude of 0.1, the maximum vertical force reaches 89 kN, and the overall vertical force of the wheel-rail system increases with the speed range of 300 km/h. The minimum value of the amplitude corresponding to the 350 km/h speed range is 0 kN.
Calculation of vertical wheel-rail force at different amplitudes for speed of 300- 350 km/h.
Research on the effect of wheel polygonisation on vehicle wheel-rail forces at 400 km/h
Researching about the evolution process of wheel polygon wear for high-speed vehicle with speed of 400 km/h. The amplitude of the wheelset polygon is set to be 0.1 mm, and the orders are from 1 to 20.27–31
For the first 13 orders (lower-order polygons), a polygon order of 12 produces the highest vertical force, with a value of 74 kN. For orders beyond 13 (higher-order polygons), a polygon order of 20 generates the highest vertical force, with a value of 104 kN, as shown in Figure 10. Maximum value curve of wheelset vertical force.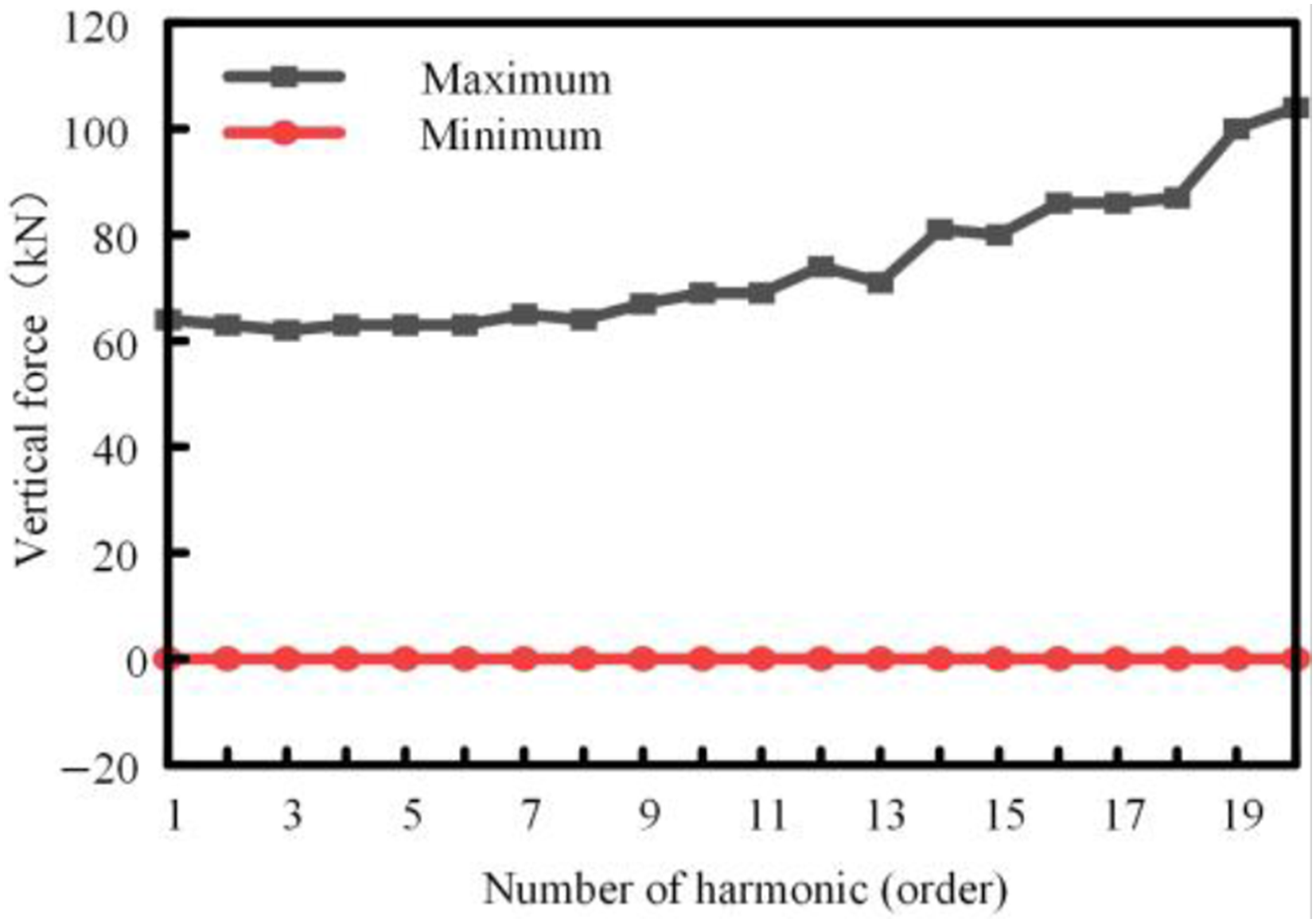
To investigate the change in vertical force of the wheelset, a complete wheelset, a 12-order polygonal wheelset, and a 20-order polygonal wheelset were each operated at a speed of 400 km/h, as shown in Figure 11. No-order, 12th-order, 20th-order wheel-track polygon time-domain and frequency-domain curves: (a) time domain curve (b) frequency domain curve.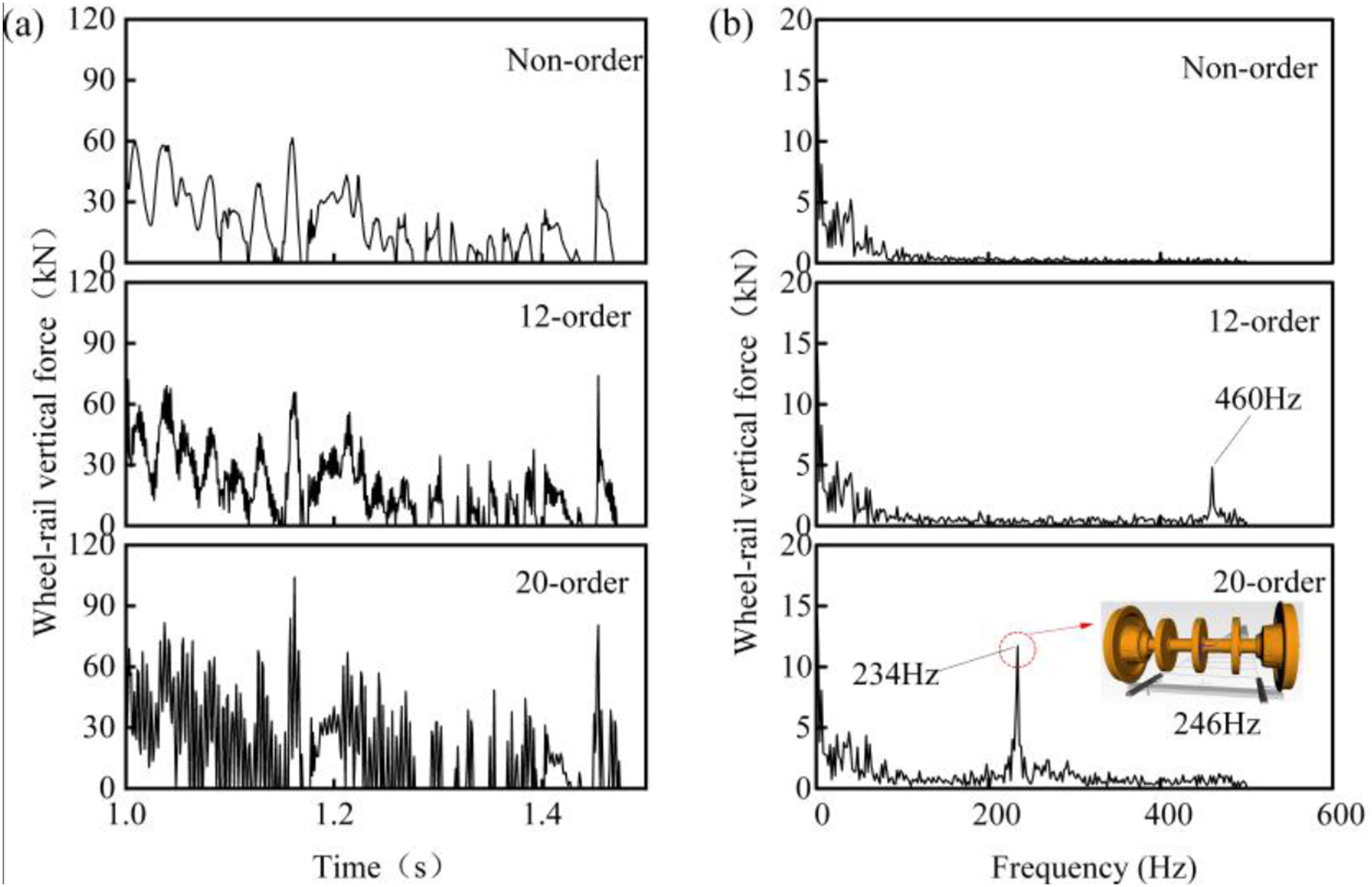
According to Figure 11(a), the fluctuation of the wheel-rail vertical force increases as the order of the polygon increases. As shown in Figure 11(b), the corresponding peak is caused by wheelset rolling when the polygon order is 12, as the rolling frequency is close to the excitation frequency induced by the 11th order polygon (470 Hz). When the polygon is of the 20th order, the peak is also due to wheel-rail impact, as the excitation frequency induced by the 20th order polygon (213 Hz) is similar to the peak frequency (234 Hz) shown in the figure. Compared to the spectrogram of the 12th order polygon, the frequency of the wheel-rail impact generated by the 20th order polygon (213 Hz) is similar to the second-order torsional mode frequency of the wheelset (246 Hz), which generates system resonance and leads to a significant increase in the vertical force of the wheel-rail.
Comparative analysis of rigid-multiple body and rigid-flexible coupling models
Based on the establishment of multi-rigid body and rigid-flexible coupling dynamics model, the vibration and wheel-rail force are observed.
Analysis of vehicle vibration and wheel-rail vertical force under flexible wheelset
The influence of flexible wheelset on vibration and vertical force is researched when the vehicle operates at a speed of 350 km/h.
As shown in Figure 12(a), the force between the flexible wheelsets and the rail is large. The maximum force between the rigid and flexible wheelsets and the rail during operation is 124 kN and 134 kN. Time-domain and Frequency-domain Curves of Wheelset Vertical Force: (a) time domain curve (b) frequency domain curve.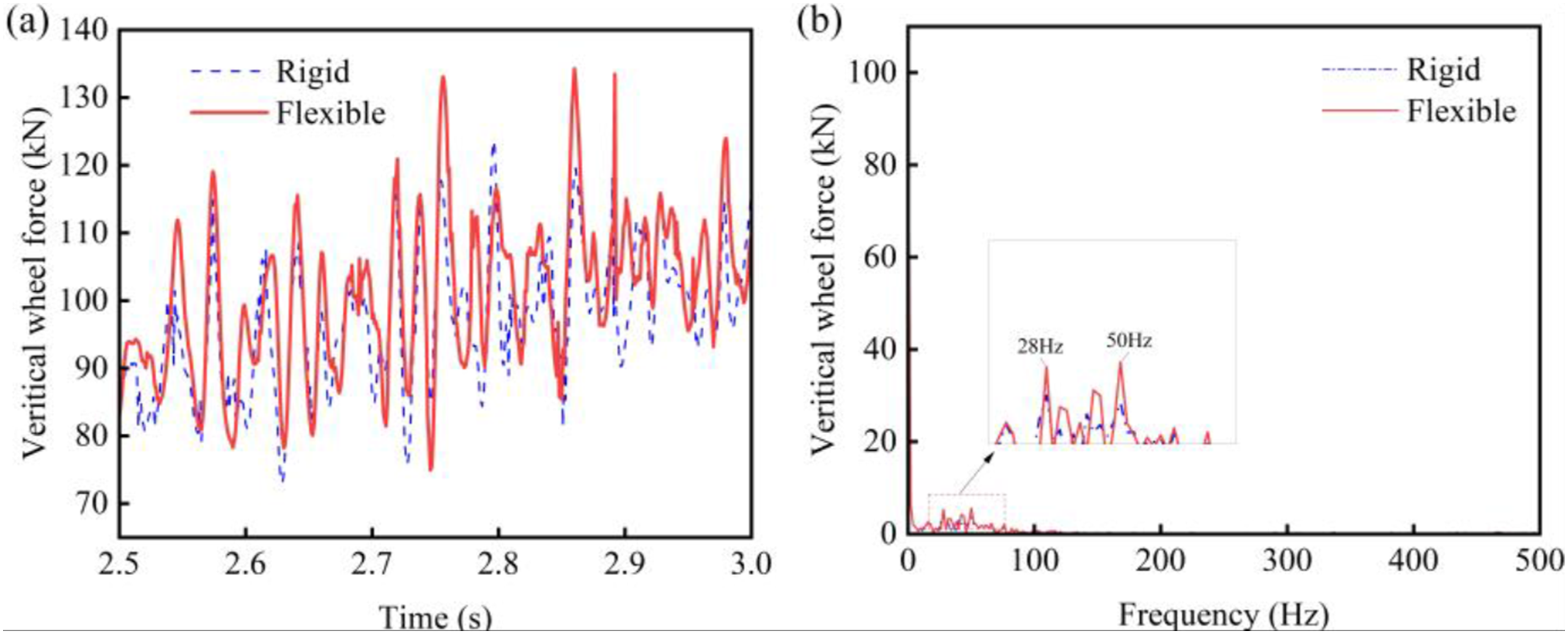
In Figure 12(b), the frequency fluctuations are mainly concentrated within 80 Hz. The peaks at 28 Hz and 50 Hz are caused by the resonance of the flexible wheelsets with the rail excitation.
As shown in Figure 13(a), the vertical acceleration fluctuation generated by the flexible wheelsets is reduced during operation compared to the rigid wheelsets due to the elastic cushioning effect of the wheelset, which absorbs part of the excitation energy. From Figure 13(b), it can be observed that the flexible wheelsets exhibit greater fluctuations than the rigid wheelsets below 46 Hz. Because the activation of elastic structural modes enhances the resonance effect. Above 46 Hz, the rigid wheelsets experience more fluctuation than the flexible wheelsets, as the rigid structure is unable to absorb high-frequency vibrations, causing the high-frequency shocks to be directly transmitted to the wheelset. Time-domain and frequency-domain curves of the vertical vibration acceleration of the wheelset: (a) time domain curve (b) frequency domain curve.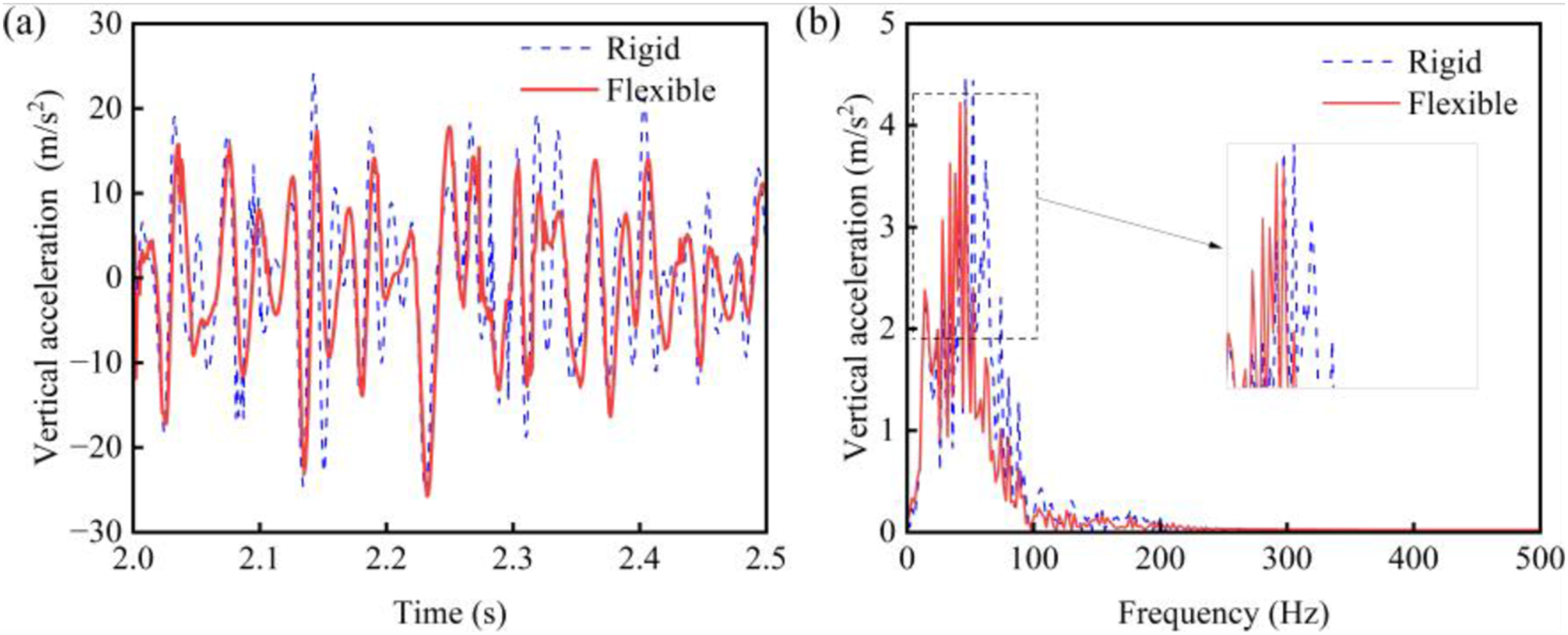
Analysis of vehicle vibration and wheel-rail force under wheelset polygonization
The wheelsets are set by the dynamics software with polygon amplitude of 0.1 and order of 20. Researching the influence of polygonization of wheelsets on the vibration of the car body and the wheel-rail force is analyzed.
As shown in Figure 14, the fluctuation of force generated between the flexible wheelsets and the rails is the largest. The complete wheelsets with polygonized with 20 orders produce sudden changes in wheel-rail forces at some moments. The reason for the sudden change is due to the generation of a gap (polygonization) between the wheel and the rail to generate some action. Time-domain curve of vertical force for elastic, 20th-degree polygonal, and complete wheelsets.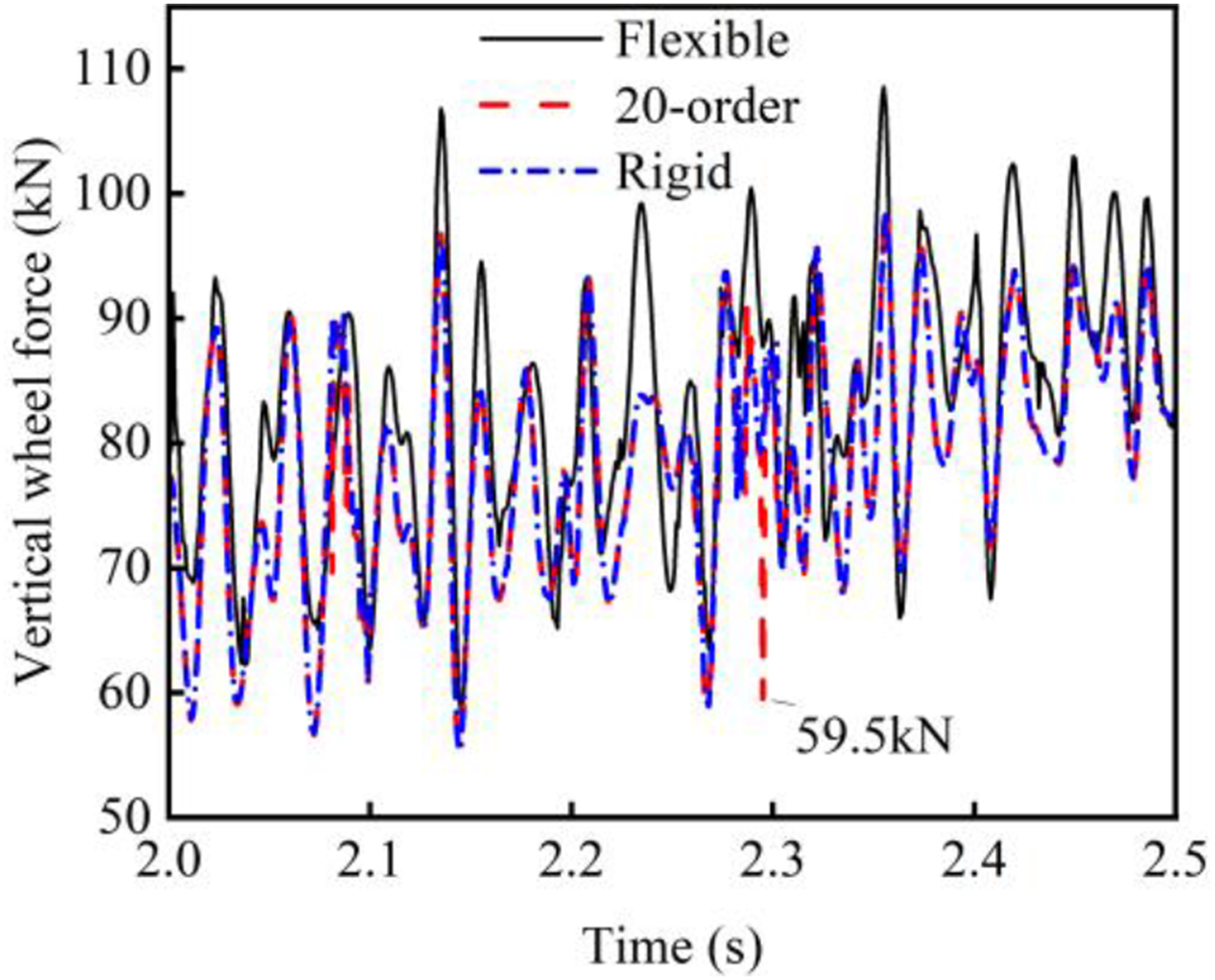
As shown in Figure 15, large abrupt changes occur at 60 Hz, 70 Hz, and 84 Hz 60 Hz is caused by the resonance of the elastic wheelsets to the first-order torsional modes (63 Hz) with the rail irregularity at 1.6 m (61 Hz). 70 Hz is caused by the resonance of the elastic wheelsets to the first-order bending modes (69 Hz) with the 2nd-order polygonal excitation (67 Hz). 84 Hz is due to the resonance excitation between the resonance excitation of the rail unevenness with the polygonal excitation. The vertical force spectrum of the elastic and 20th-order polygonal wheelsets.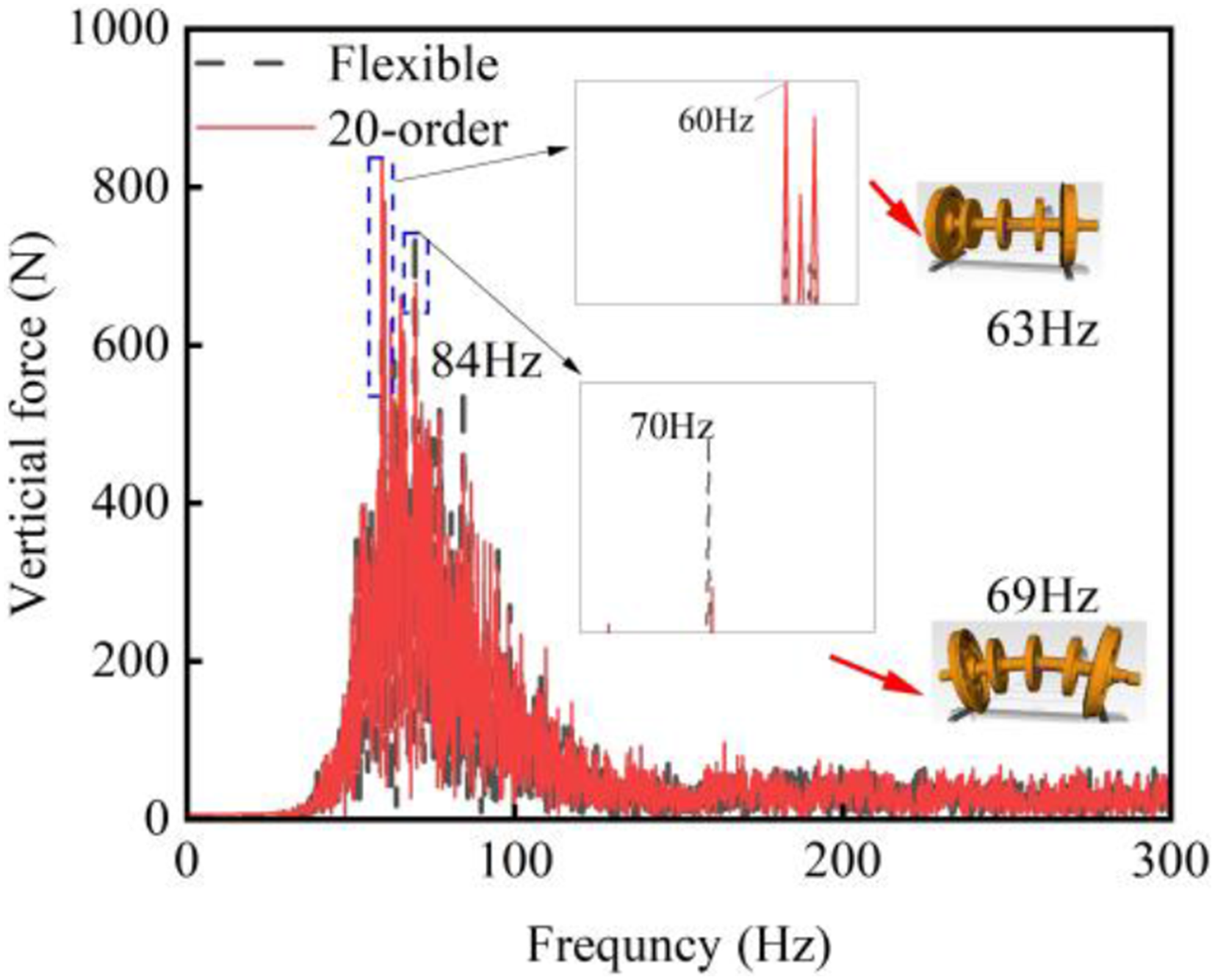
Conclusion
In order to investigate the influence of wheel polygons on the car body components during the operation of the vehicle, the rigid-flexible coupling dynamics model of the vehicle is established by the dynamics simulation software. The influence of polygon amplitude, order and different speed on the vehicle performance is investigated. (1) When the vehicle speed exceeds 200 km/h, the vertical acceleration of the vehicle structure increases significantly. The larger the polygon amplitude, the more intense the wheel-rail vertical force fluctuation, manifested as the peak value rises, the minimum value tends to zero, especially in the 350 km/h high speed and large amplitude conditions, this nonlinear coupling effect is particularly significant, there is a high risk of jumping off the track. (2) In 400 km/h operating conditions, the wheel-rail force changes caused by low-order polygons (12th order) are relatively smooth, while high-order polygons (20th order) are prone to stimulate the wheel-rail system in the mid-frequency domain of the strong response, and its excitation frequency and the impact frequency of the wheel-rail and the wheel pair of its own modal frequency is highly close to the resonance phenomenon, which is a key factor in triggering the instability of the system. (3) For the 20th-order polygonal excitation, the 60 Hz peak originates from the resonance of the first-order torsion mode with the track unevenness frequency (about 61 Hz), the 70 Hz peak is caused by the superposition of the first-order bending modes and the excitation frequency, and the 84 Hz is the synthetic excitation of the track spectrum and the polygonal excitation. Although flexible wheelsets can partially absorb high-frequency energy, the overlap of specific mode frequencies can amplify localized wheel-track forces, leading to shock and wear risks.
Footnotes
Acknowledgements
The authors thank the financial support from Jiangsu Provincial Natural Science Foundation Project (BK20231352), Innovative Training Project for College Students in China (202410320025Z), Jiangsu Province College Student Innovation Training Program (202310320108Y).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest concerning the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The financial support from Jiangsu Provincial Natural Science Foundation Project (BK20231352), Innovative Training Project for College Students in China (202410320025Z), Jiangsu Province College Student Innovation Training Program (202310320108Y).