
Abstract
To address the problems of slow steady-state response, poor optimization accuracy, and easy falling into local optima in the parameter optimization of hydraulic electric energy-feeding suspension systems, an improved cloud particle swarm optimization-cuckoo search (CPSO-CS) algorithm was proposed. The algorithm innovatively integrated cloud theory and Logistic chaotic initialization into the traditional particle swarm optimization (PSO) and, combined with the levy flight local search mechanism of cuckoo search (CS), achieved a balance between global exploration and local development. Under Class-B, Class-C, and convex road excitations, the dynamic characteristics of passive control, sliding mode control (SMC), PSO control, and CPSO-CS control strategy applied to the hydraulic electric energy-feeding suspension were analyzed. Vertical body acceleration, suspension dynamic deflection, and tire dynamic load were selected as the evaluation indices. The results indicate that the proposed improved algorithm enhances both the optimization accuracy and convergence speed of the suspension system’s dynamic performance indices, thereby significantly improving the ride comfort of the hydraulic electric energy-feeding suspension system.
Keywords
Introduction
As a critical component connecting the vehicle body to the wheels, the automotive suspension system absorbs road impact energy, supports the vehicle’s weight, and provides occupants with a comfortable and safe driving experience. 1 Traditional automotive suspension systems typically dissipate vibration energy as heat through damping valves installed in shock absorbers, thereby achieving energy absorption and reducing vibration.2,3 Energy-harvesting suspension systems not only effectively suppress vibrations caused by road irregularities but also recover a portion of the vibrational energy. Compared to traditional passive suspensions, the electrohydraulic energy-feedback suspension system offers advantages such as simplified structural design and lower cost. It effectively recovers vibrational energy to achieve energy-feedback damping, gaining widespread application in the field. Intelligent control strategies can be applied to enhance system performance. 4
Numerous control algorithms exist for semi-active suspension systems, including PID, LQR, Fuzzy, RBF, and SMC.5–7 Lu 8 et al. combined adaptive sliding mode control with fuzzy logic systems, enhancing system reliability while addressing external disturbances and actuator failures in the suspension system. Simulation results across multiple driving scenarios validated the effectiveness of the designed fault-tolerant control method. Su 9 et al. proposed integrating adaptive sliding mode control with radial basis function neural networks to compensate for uncertainties in nonlinear system models, thereby achieving high-performance system control.
The FAPID control algorithm designed by Hu 10 et al. balances the advantages of fast response speed, high control accuracy, and excellent stability, demonstrating superior control performance compared to SMC and PID control algorithms. Tan 11 et al. designed a dual-closed-loop PID controller based on the particle swarm optimization algorithm for active suspension control. The designed controller not only mitigates body vibrations caused by road surface irregularities but also enhances vehicle ride comfort. Zhao 12 developed a CS-PID control strategy that generates desired damping forces in real time based on vehicle state. Numerical simulation results demonstrate that the CS-PID control strategy can be successfully applied to suspension systems, exhibiting practical value. Chiou 13 et al. employed a Q-learning collaborative approach to assist PSO in efficiently searching for optimal fuzzy PID controller parameters. This algorithm reduces the number of evolutionary generations while also evolving fuzzy systems to achieve superior performance. Hooi Hung Tang 14 et al. combined PSO with water wave optimization (WWO), significantly improving the integral time absolute error (ITAE) of body displacement. Zhao 15 et al. employed an LQR controller based on a hybrid particle swarm optimization genetic algorithm to control an active suspension system, enhancing metrics such as suspension mass acceleration, suspension deflection, and tire dynamic load.
Zhang 16 employed a particle swarm optimization algorithm to globally optimize the LQR weighting matrix, thereby enhancing the stability of the suspension dynamic stroke. A fuzzy adaptive cuckoo search algorithm was proposed, capable of reducing computational time during the evolutionary process while improving the accuracy of multi-objective optimization problems. 17 Traditional particle swarm optimization algorithms offer advantages such as computational simplicity and rapid convergence.18,19 However, their flight states are not entirely controlled by particles, which weakens local search capabilities and may lead to overlooking optimal solutions. 20 The cuckoo search algorithm proves more effective than particle swarm optimization. Integrating Levy flight enhances both its local and global search capabilities. 21
This paper establishes a mathematical model of the hydraulic electric energy-feeding suspension system. To address the system uncertainties and achieve a longer steady-state response time, the CPSO-CS algorithm is introduced. Aiming at nonlinear factors in the suspension system such as faults, time-varying mass and unknown disturbances, this study combines cloud theory, PSO and CS to form the CPSO-CS algorithm tailored for hydraulic electric energy-feeding suspensions. Comparative numerical simulations verify the effectiveness and convergence performance of the proposed algorithm.
The main contributions of this paper are listed as follows: (1) A two-degree-of-freedom 1/4 hydraulic electric energy-feeding suspension model was established to investigate the characteristics of the suspension system. (2) CPSO-CS is applied to a hydraulic electric energy-feeding suspension to reduce the time required for the system to reach steady-state response.
The main work of this paper is as follows: Chapter 2 establishes the model of a two-degree-of-freedom 1/4-scale hydraulic electric energy-feeding suspension system; Chapter 3 describes the design process of the CPSO-CS; Chapter 4 verifies the effectiveness of the designed CPSO-CS algorithm through simulation comparison experiments; Chapter 5 presents the conclusions.
Dynamic model of hydraulic electric energy-feeding suspension
As shown in Figure 1, a mathematical model of a two-degree-of-freedom 1/4 vehicle hydraulic electric energy-feeding suspension system is constructed based on the following dynamic equations of the system: A quarter-vehicle dynamics model.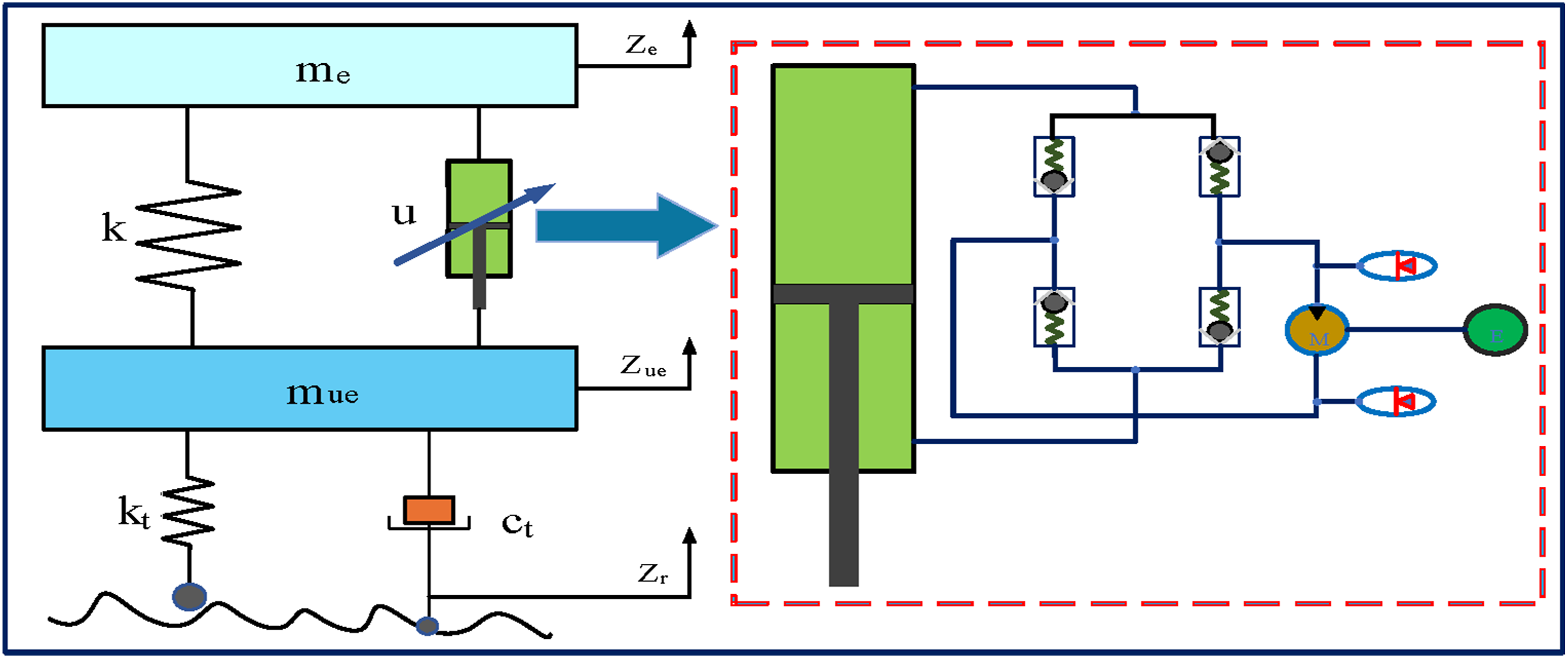

This model serves as a classic fundamental model for studying vertical vibrations in vehicle suspensions. It accurately characterizes the core transmission mechanisms of vertical vibrations while eliminating coupling interference from non-vertical dynamics such as pitch and roll. This facilitates focused validation of the CPSO-CS algorithm’s ability to optimize key vertical-suspension parameters.

Where,
The state vector is selected as:

Considering that the control objective primarily involves the movement of spring-loaded mass and incorporating the uncertainty of key parameters, the parameter variation is introduced:

Where
Equation (1) can be decoupled as follows:
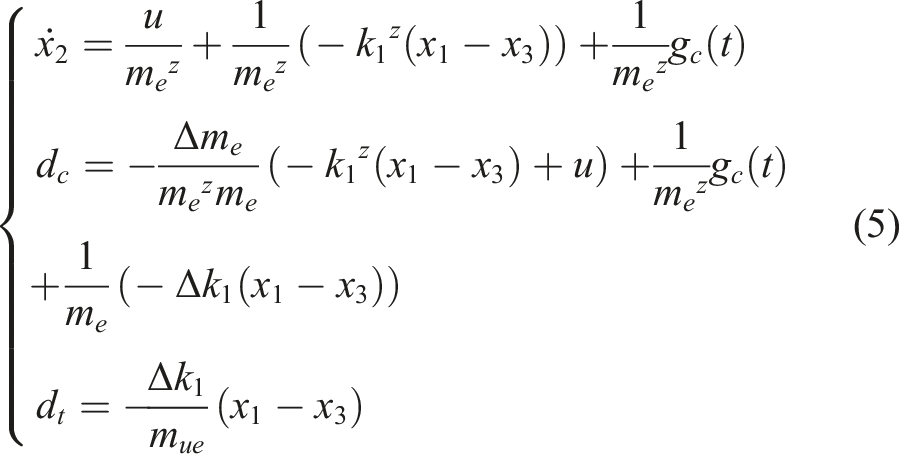
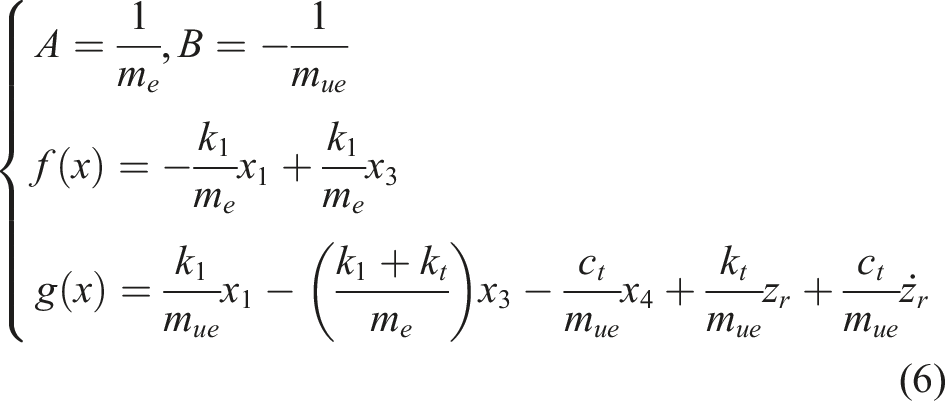
Where
Define
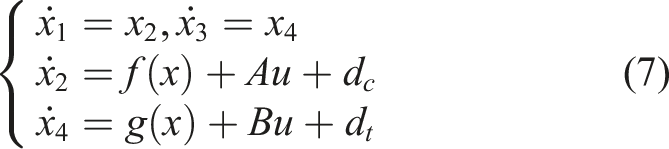
The final state space expression for the suspension system is:
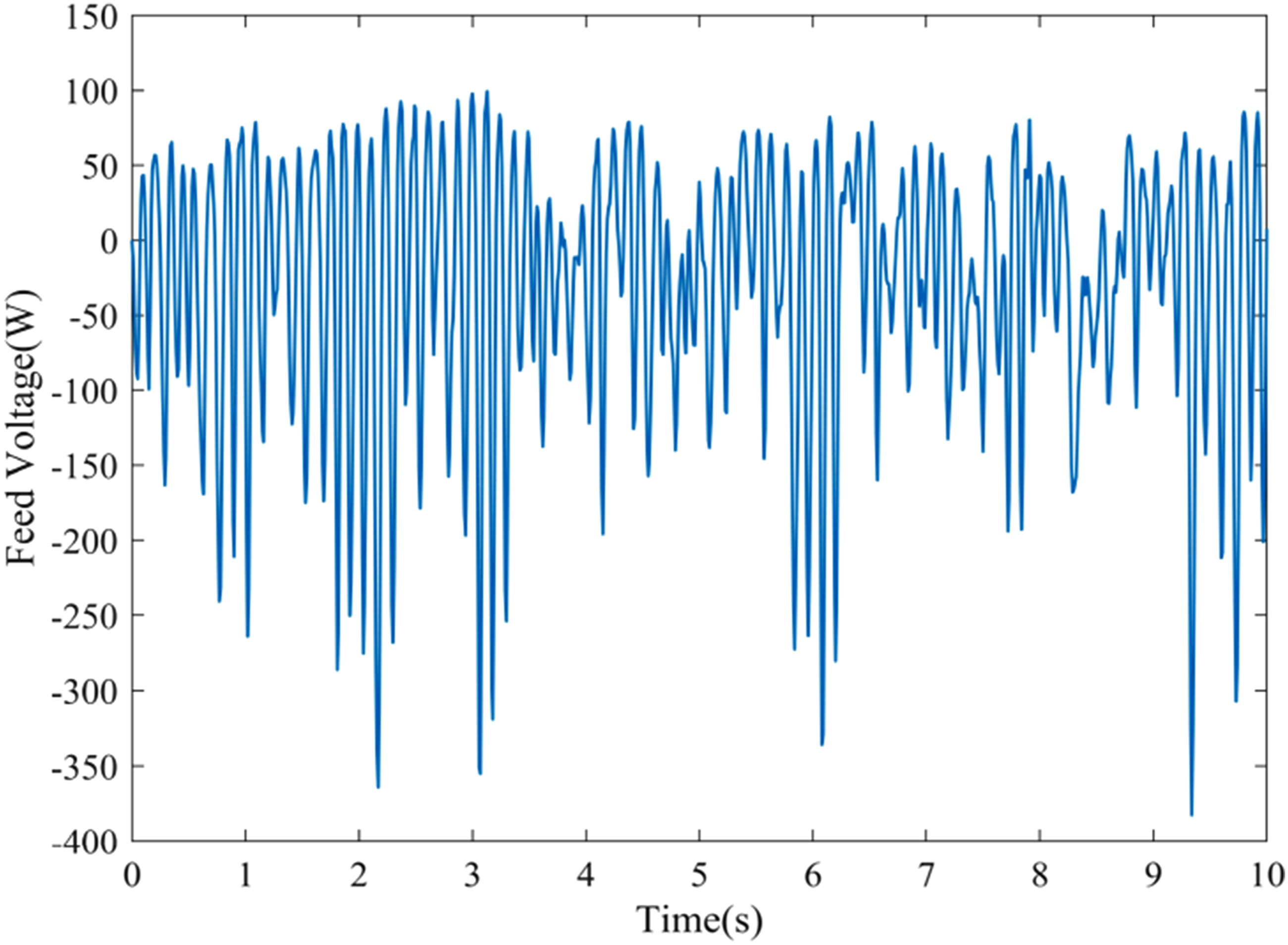
Power feed capacity:

Intelligent algorithm optimization
CPSO algorithm
Normalize each target to eliminate dimensional effects:

Where:
Original calculation formulas for each target:
Where
Construct the single-objective fitness function:

A Logistic chaotic mapping is employed to generate the initial population of optimization variables:

Where
Introducing cloud theory, the average fitness value of particles is:

Where
Divide the particles into two groups: those with fitness values greater than the average, and those with fitness values less than the average. Calculate the average fitness values for each group, denoted as (1) When (2) When (3) When
Where
The cloud-adaptive inertial weighting coefficient is obtained as:

By employing appropriate inertia weight coefficients to balance global search capability and local search capability, the particle swarm optimization algorithm formula is derived as follows:

Where
Update particle velocity:
Where
Particle position update:

Variable constraints:
Update local optimum and global optimum:

CPSO-CS algorithm
Define the Levy flight function:



Where
Retain the best particles:

So:

So:

Where
Figure 2 shows a schematic diagram of a suspension system controlled based on the CPSO-CS. Control schematic based on CPSO-CS.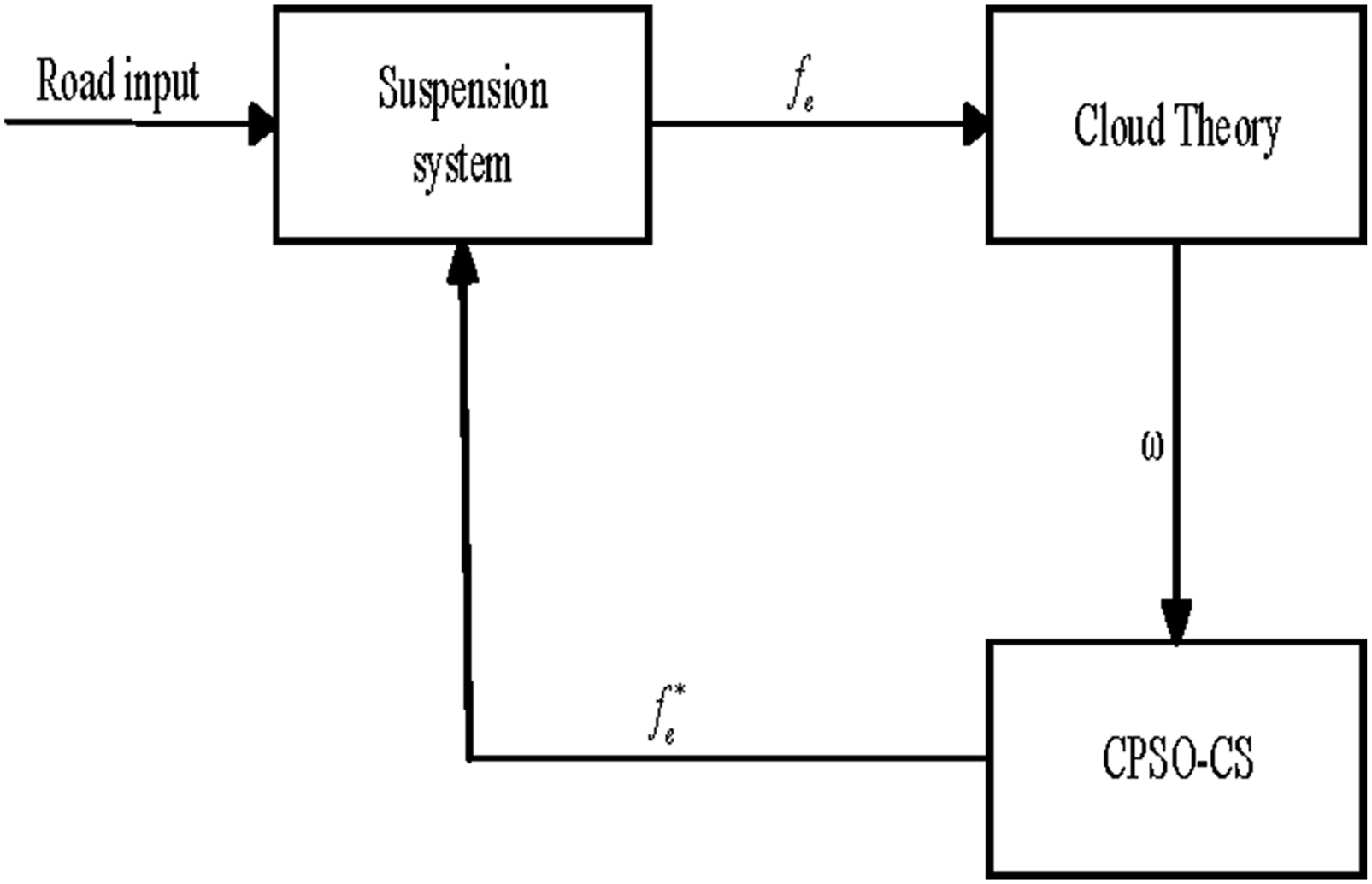
Research objectives
To address the shortcomings of traditional PSO-CS hybrid algorithms, such as fixed inertia weight, synchronous search mode, and random population initialization, this study develops an improved CPSO-CS algorithm incorporating three core innovations. Unlike existing approaches that merely concatenate PSO and CS algorithms, this work reconstructs the hybrid algorithm’s search logic by introducing: Logistic chaotic initialization; a cloud-adaptive inertia weight mechanism based on cloud theory; and a serial search pattern in which CPSO performs a global search first, followed by CS triggering local search.
This algorithm overcomes the limitations of traditional hybrid PSO-CS algorithms with fixed weights and synchronous search. It adapts to the nonlinear characteristics and parameter uncertainties of the hydraulic electric energy-feeding suspension system, enhancing the optimization accuracy and convergence speed of suspension system dynamic metrics. This significantly improves the ride comfort and driving safety of hydraulic electric energy-feeding suspension systems.
Test function simulation analysis
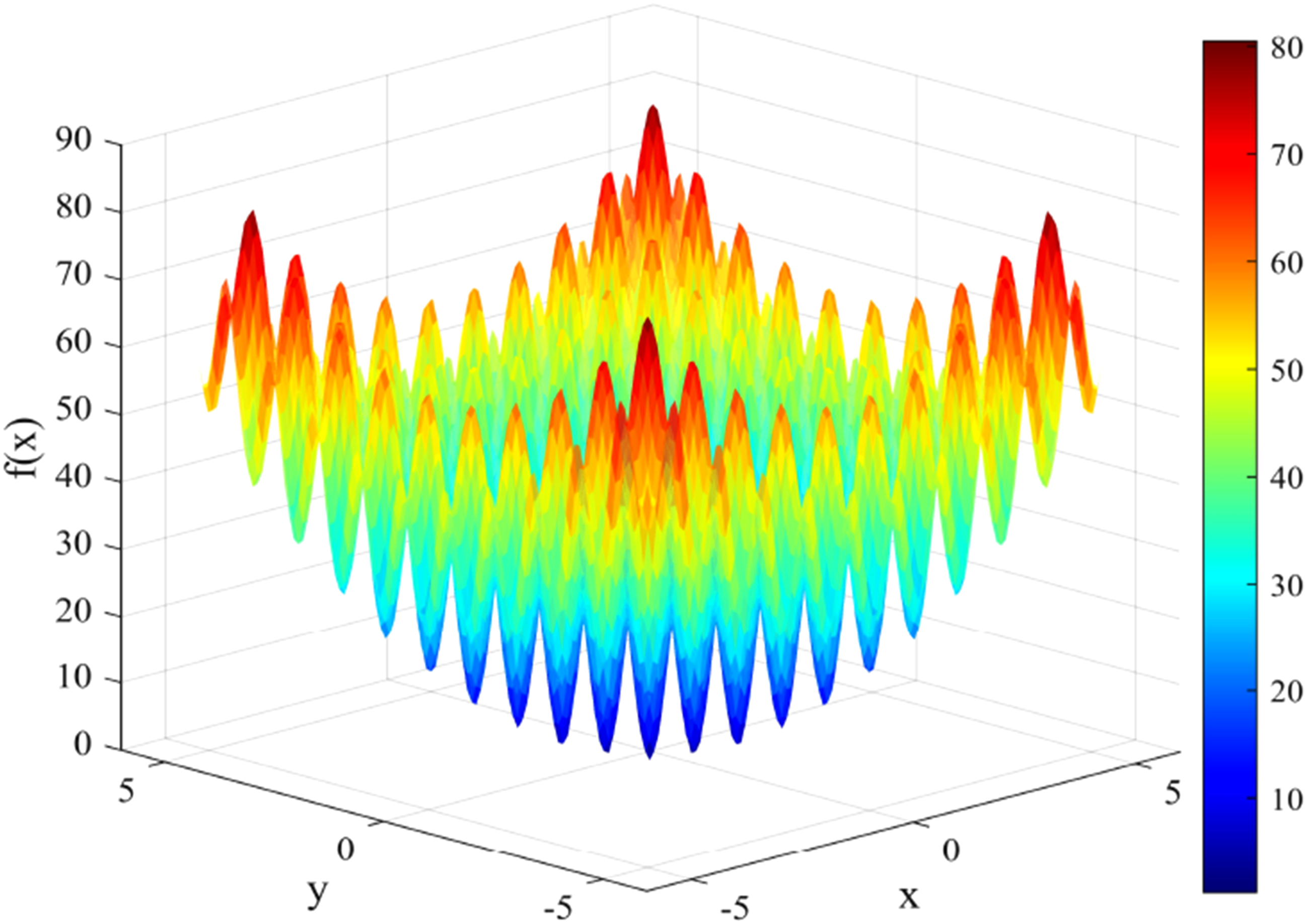
To verify the global search, local development, and resistance to local optima of the proposed improved CPSO-CS algorithm, the Rastrigin test function was selected for simulation validation. This function is a classic, highly nonlinear multimodal function for testing the performance of intelligent algorithms. It has numerous local optima and only one global optimum, making it effective for evaluating whether an algorithm is prone to getting stuck in local optima. It is suitable for assessing the performance of algorithms for high-dimensional parameter optimization of Hydraulic electric energy-feeding suspension systems.
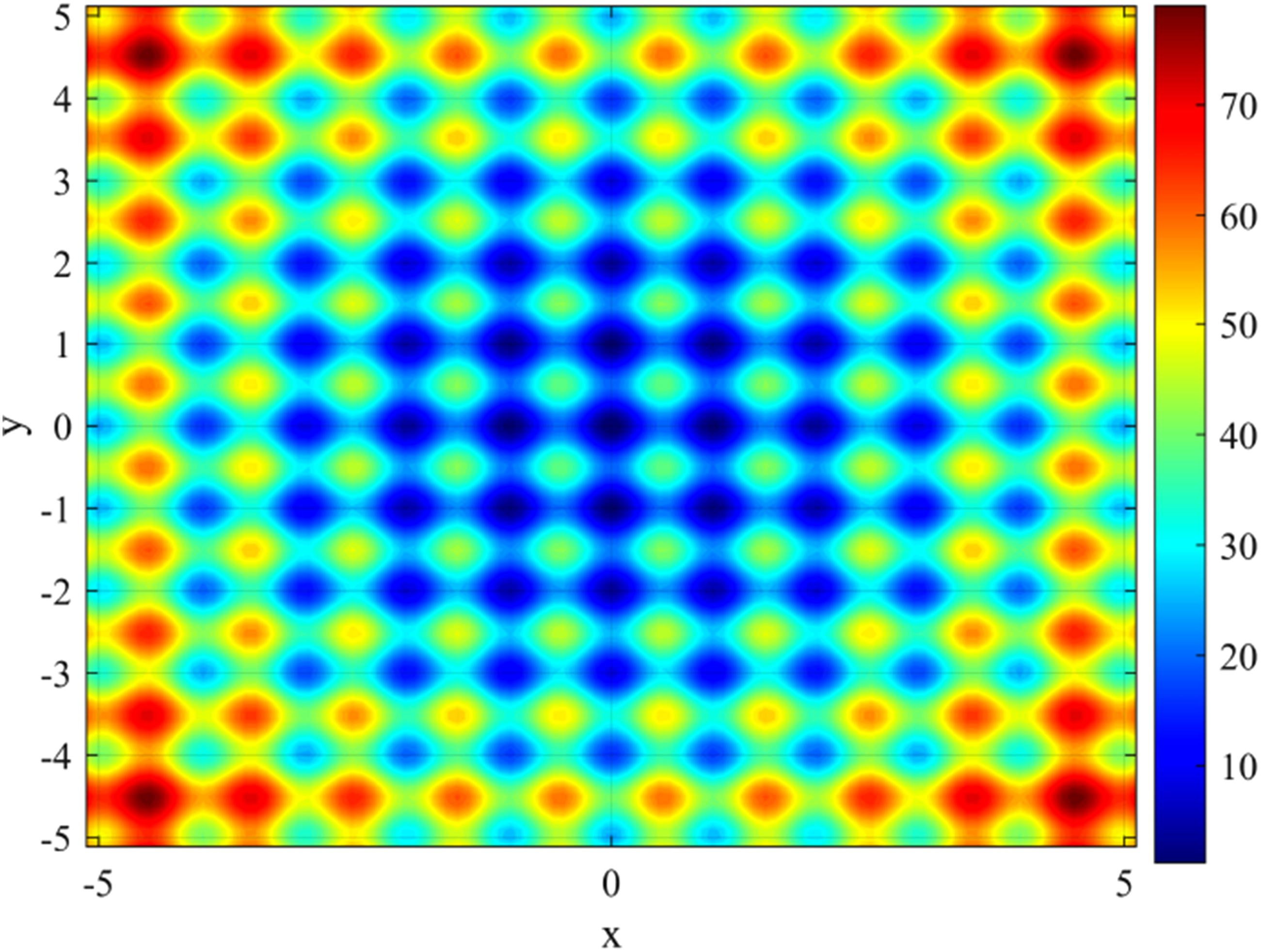
The traditional PSO algorithm and the improved CPSO-CS algorithm were used, respectively, to perform 400 iterations of optimization on this function, resulting in the algorithm fitness convergence curve (Figure 3), the three-dimensional distribution of the Rastrigin function (Figure 4), and the contour map (Figure 5). The results of each figure and their physical significance are explained as follows: Fitness curves of test functions for PSO and CPSO-CS. Rastrigin function 3D image. Rastrigin function contour plots.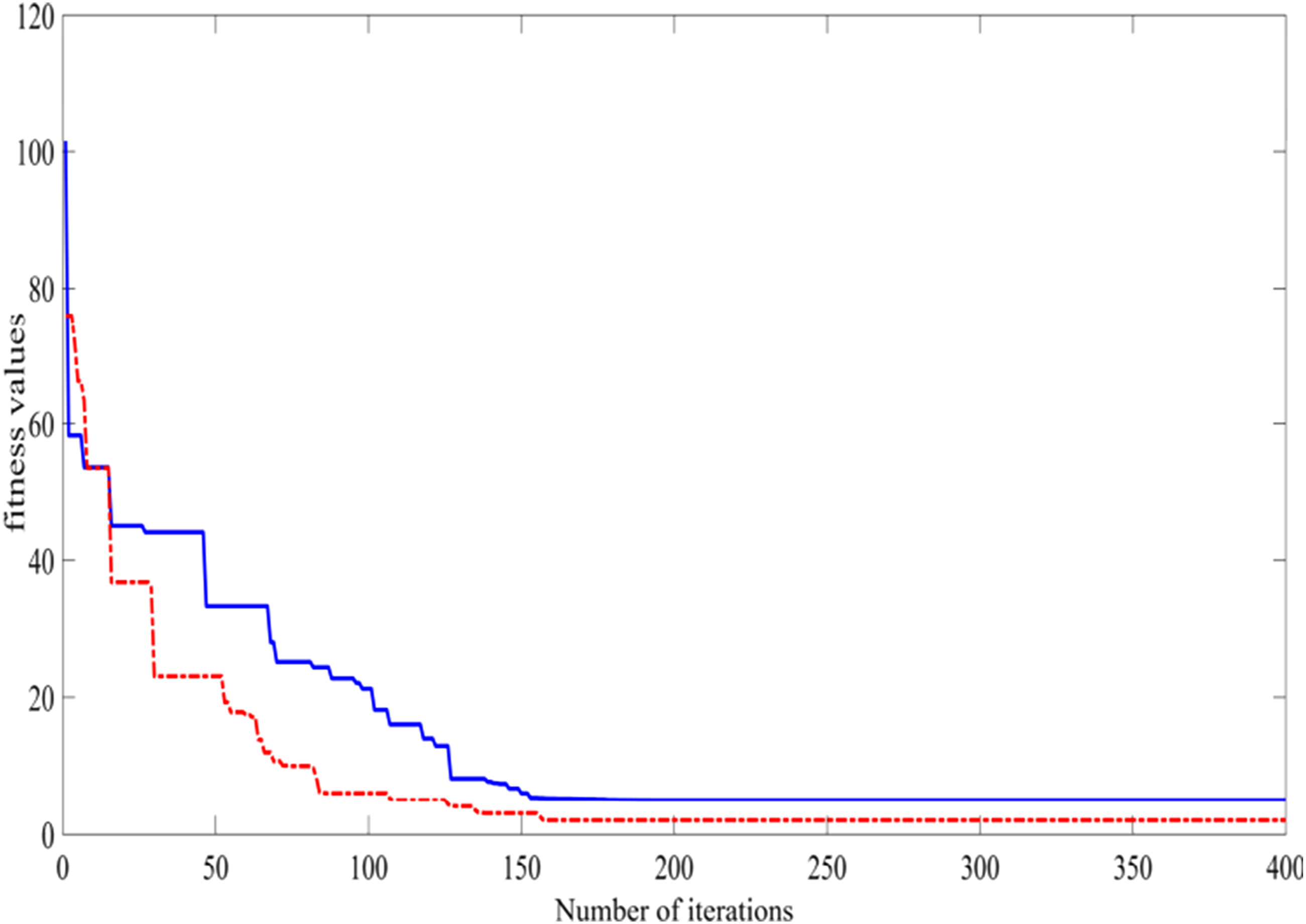
As shown in Figure 3: (1) Early iteration stage, the fitness values of both algorithms decrease rapidly, reflecting their basic global search capabilities, but the decline rate of the CPSO-CS algorithm is significantly faster than that of the traditional PSO algorithm. This characteristic arises from the combination of the Logistic chaotic initialization and cloud-adaptive inertia weight design in the CPSO-CS algorithm: chaotic initialization allows the initial population to uniformly cover the solution space, preventing clustering of initial solutions; cloud-adaptive weights use small weights (ω = 0.2) in the early iterations to enhance global exploration, enabling the algorithm to quickly traverse the solution space and approach the region of the global optimum. (2) Mid-iteration, the decline rate of the CPSO-CS algorithm is still significantly faster than that of the traditional PSO algorithm. The main reason is the intervention of CS Lévy flight for local fine search. After the global search of CPSO locks onto the potential optimal solution region, the CS algorithm conducts a high-precision fine search within that region, effectively overcoming the constraints imposed by local optima. (3) In the later iterations, the fitness value of the traditional PSO algorithm remained at a relatively high level, while the fitness curve of the CPSO-CS algorithm gradually converged to a very low stable value, achieving precise capture of the global optimum. This result directly validates that the improved CPSO-CS algorithm significantly outperforms the traditional PSO algorithm in terms of convergence speed, optimization accuracy, and resistance to local optima, laying a solid performance foundation for subsequent applications of this algorithm to the parameter optimization of liquid-electric energy-harvesting suspension systems.
As shown in Figure 4, the spatial distribution of the three-dimensional image clearly indicates that there are many local optima in the solution space, while there is only one global optimum. This distribution makes the algorithm easily trapped in local optima during the search. However, in nonlinear, complex solution spaces with multiple local optima, the CPSO-CS algorithm can still achieve efficient optimization, demonstrating its robustness.
As shown in Figure 5, the contour distribution and the algorithm’s search trajectory indicate that closed areas in the contour distribution correspond to local optimal solutions, and the smallest closed area at the center corresponds to the region of the global optimal solution. The search trajectory of the CPSO-CS algorithm can continuously move toward the central region of the global optimal solution, eventually converging to its core. Figure 6 shows the CPSO-CS flowchart. CPSO-CS flowchart.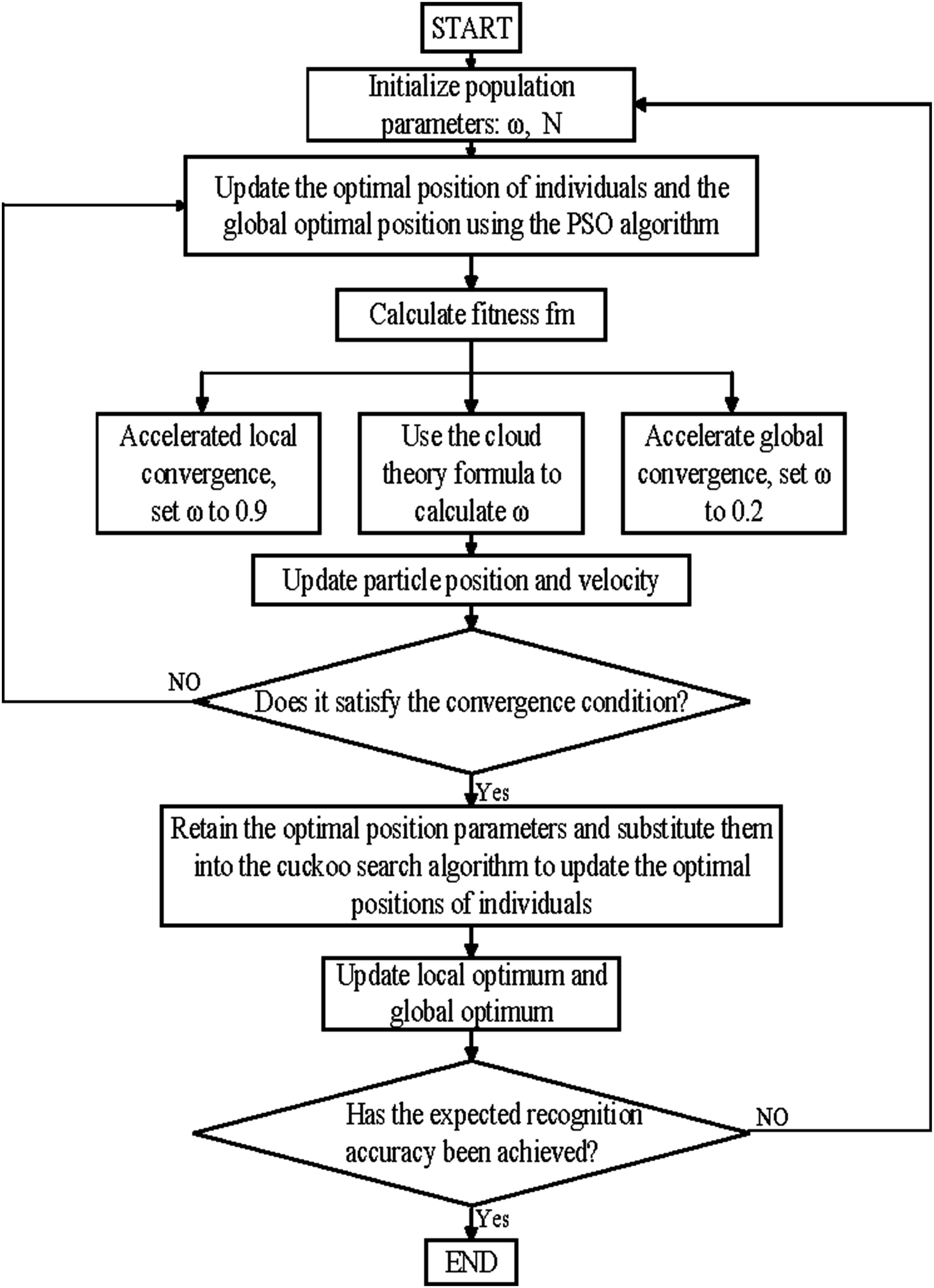
Furthermore, the underlying reason for the superior performance of the CPSO-CS algorithm is explained: the cloud-adaptive inertia weight dynamically switches between global exploration and local exploitation based on the particle’s fitness value, and the long-tail characteristic of Levy flights allows the algorithm to break free from local optima, ultimately achieving precise capture of the global optimal solution.
Simulation results and analysis
The time-domain mathematical expression for filtering white noise random pavement inputs to better simulate urban road conditions is given by
22
:

The power spectral density of the filtered white noise is:

Select B-Class and C-Class road excitations, set the vehicle speed to 20 m/s, run the established 1/4 vehicle suspension system model in MATLAB, and input the road excitation. The simulation results are shown in Figure 7. Road input excitations.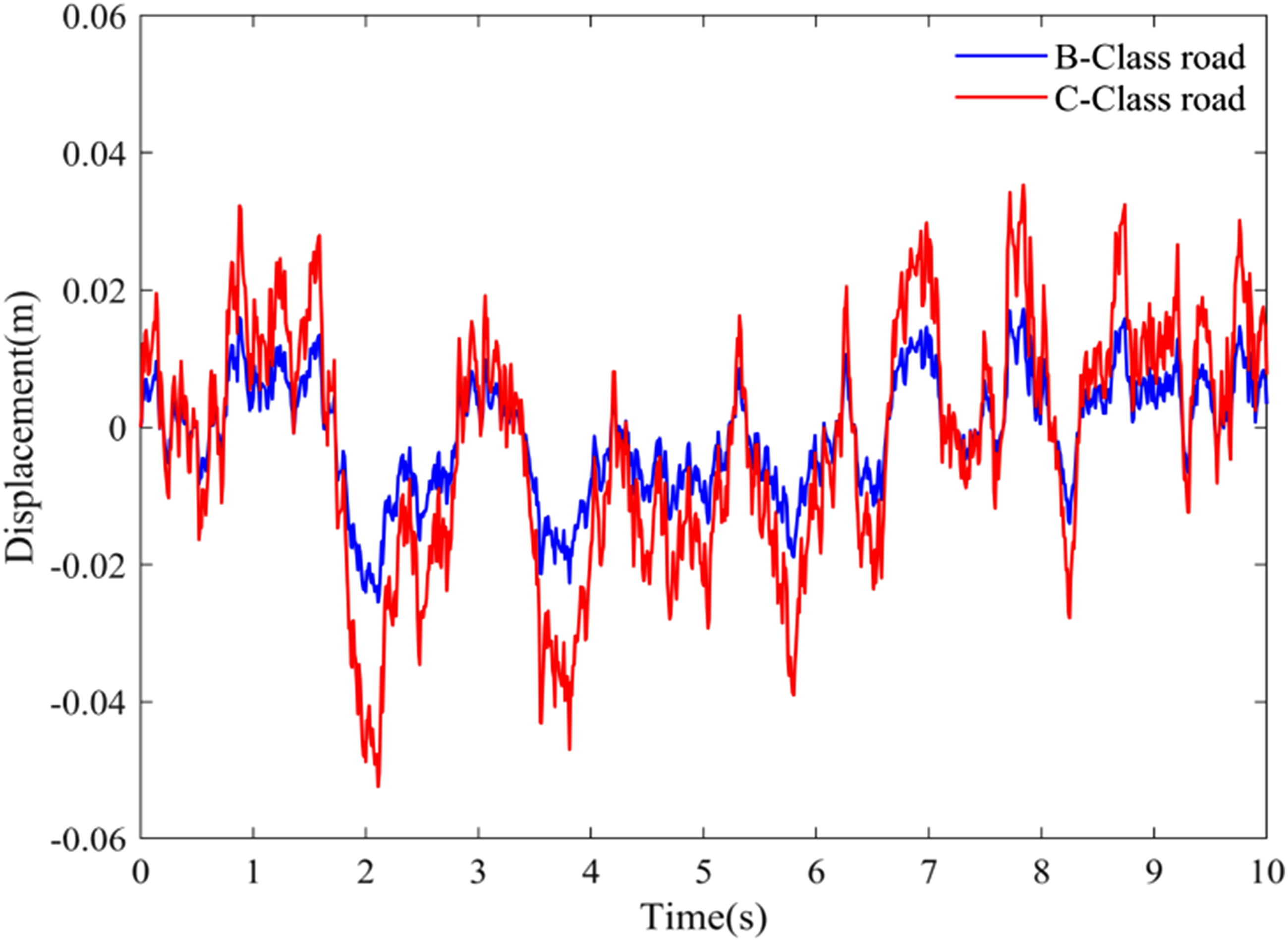
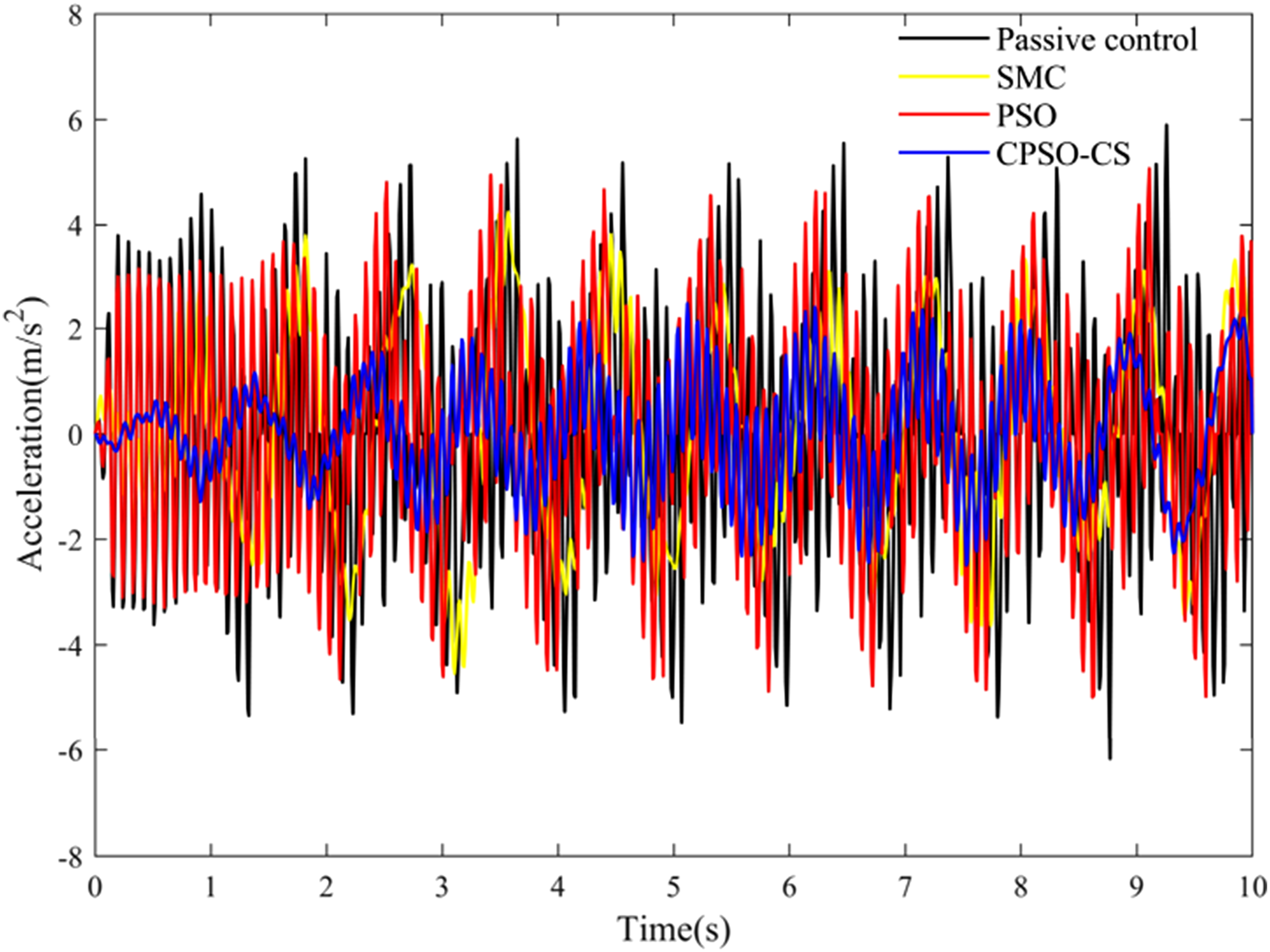
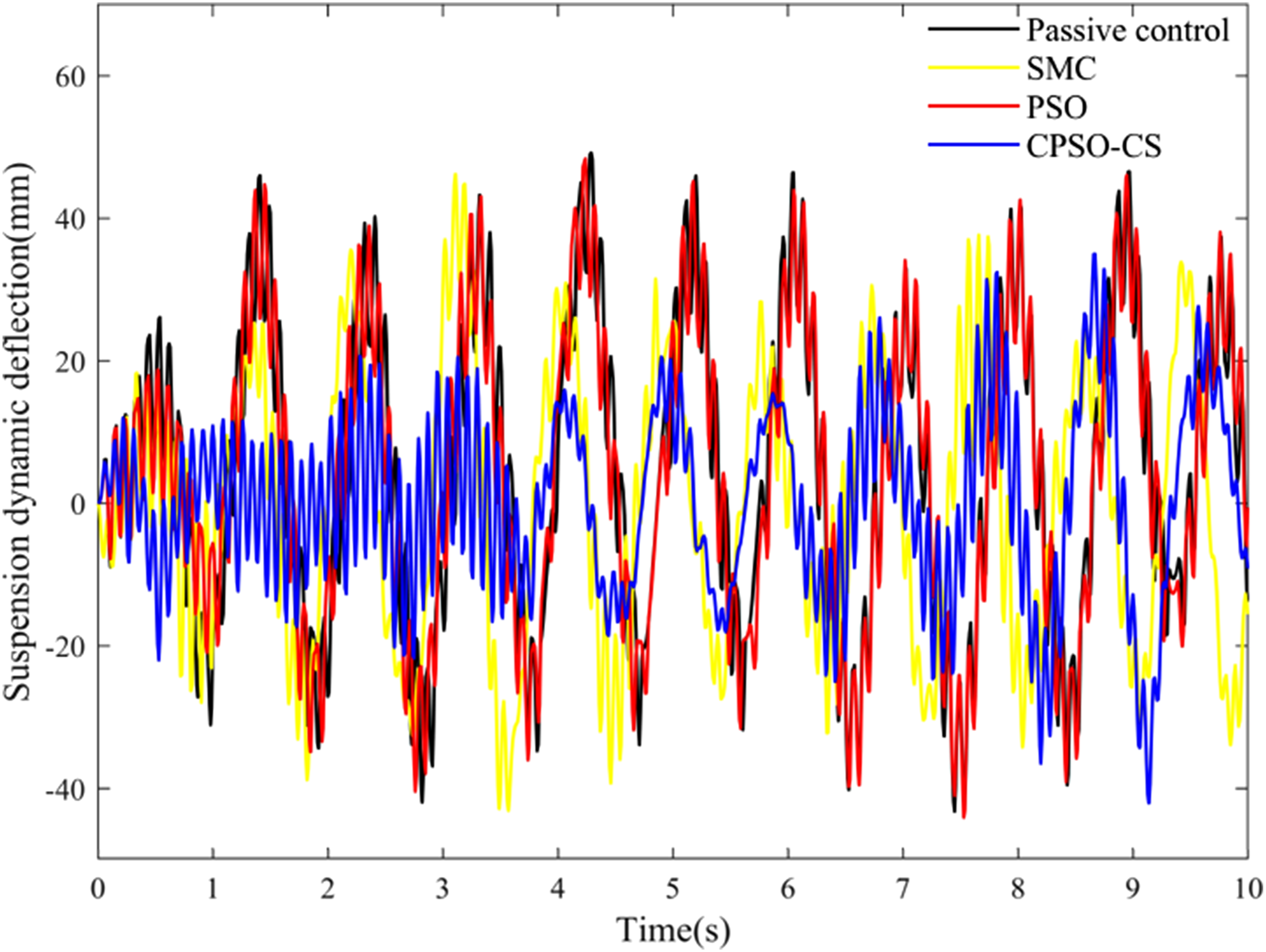
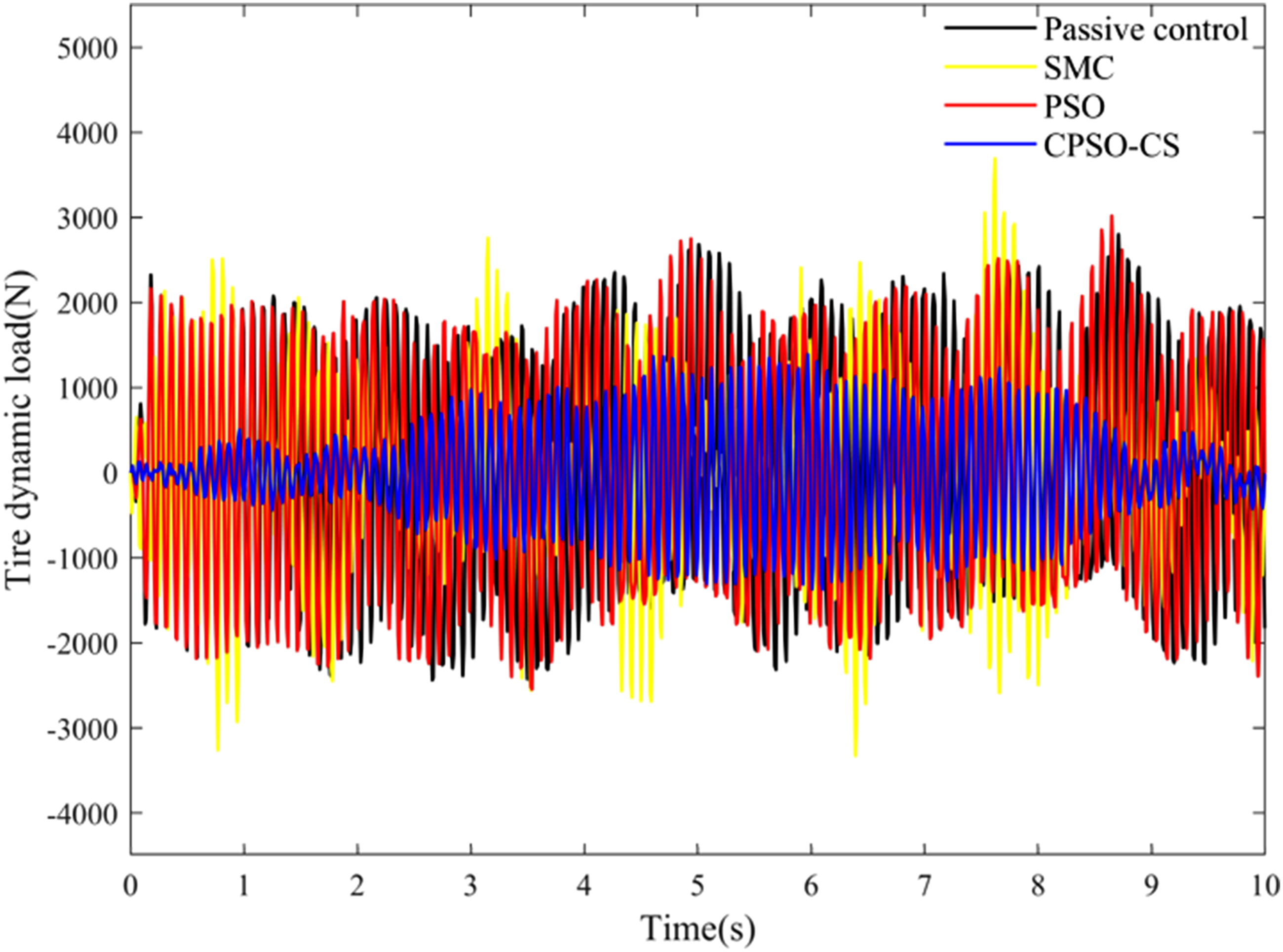
Using vertical body acceleration, suspension dynamic deflection, and tire dynamic load as evaluation metrics for the suspension system, this study investigates CPSO-CS and conducts comparative simulation analyses against traditional passive control, SMC and PSO algorithms.
The root mean square value is:

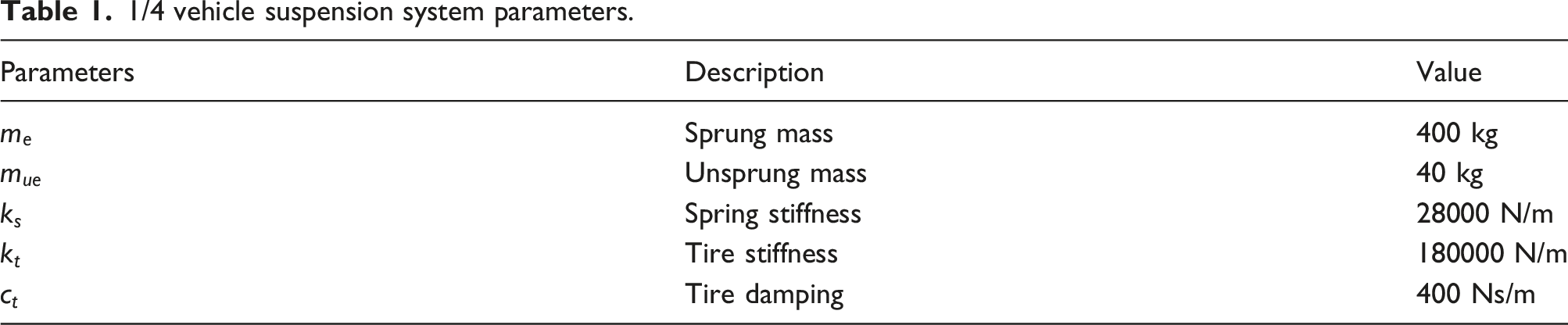
1/4 vehicle suspension system parameters.
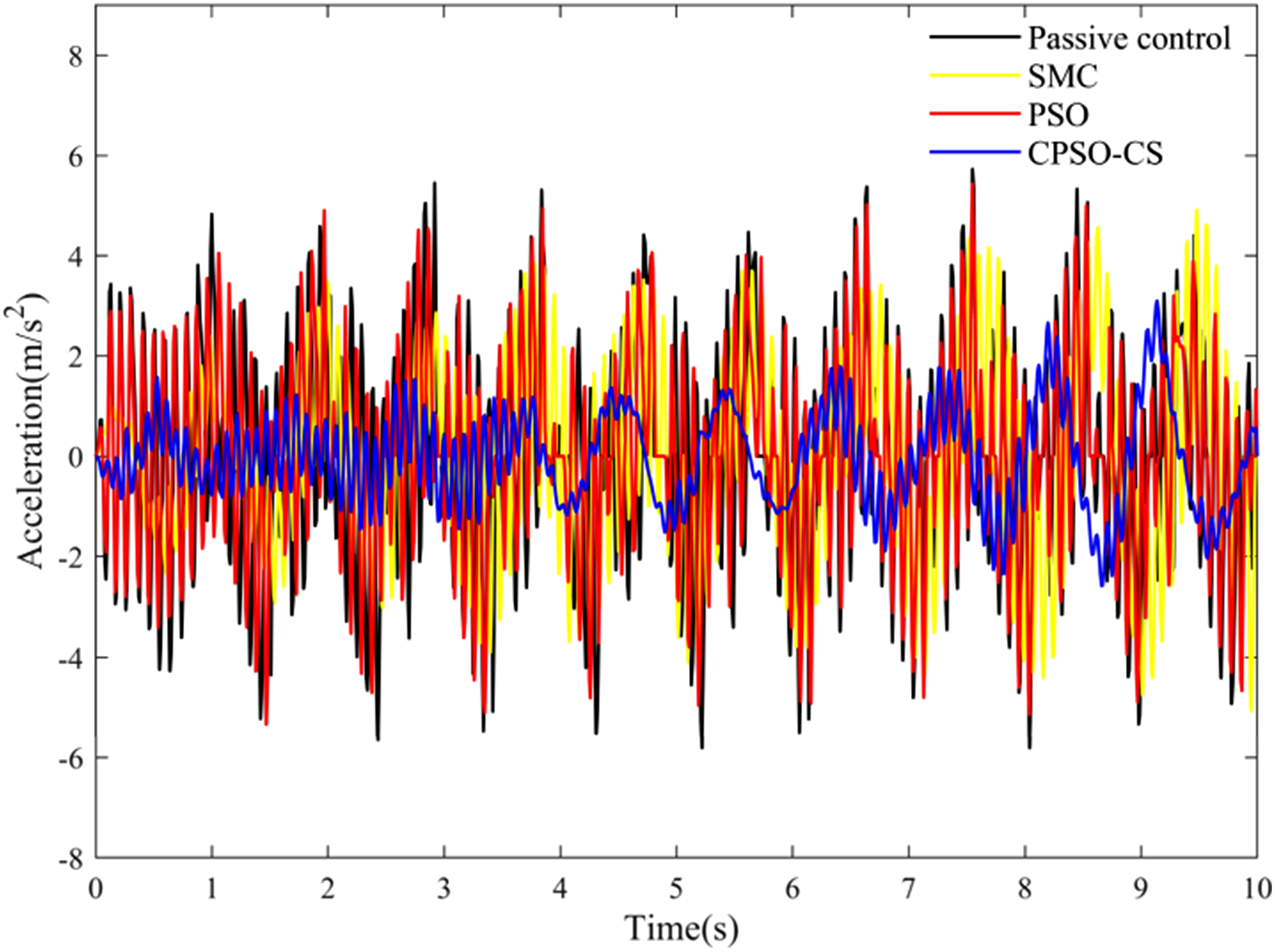
Acceleration.
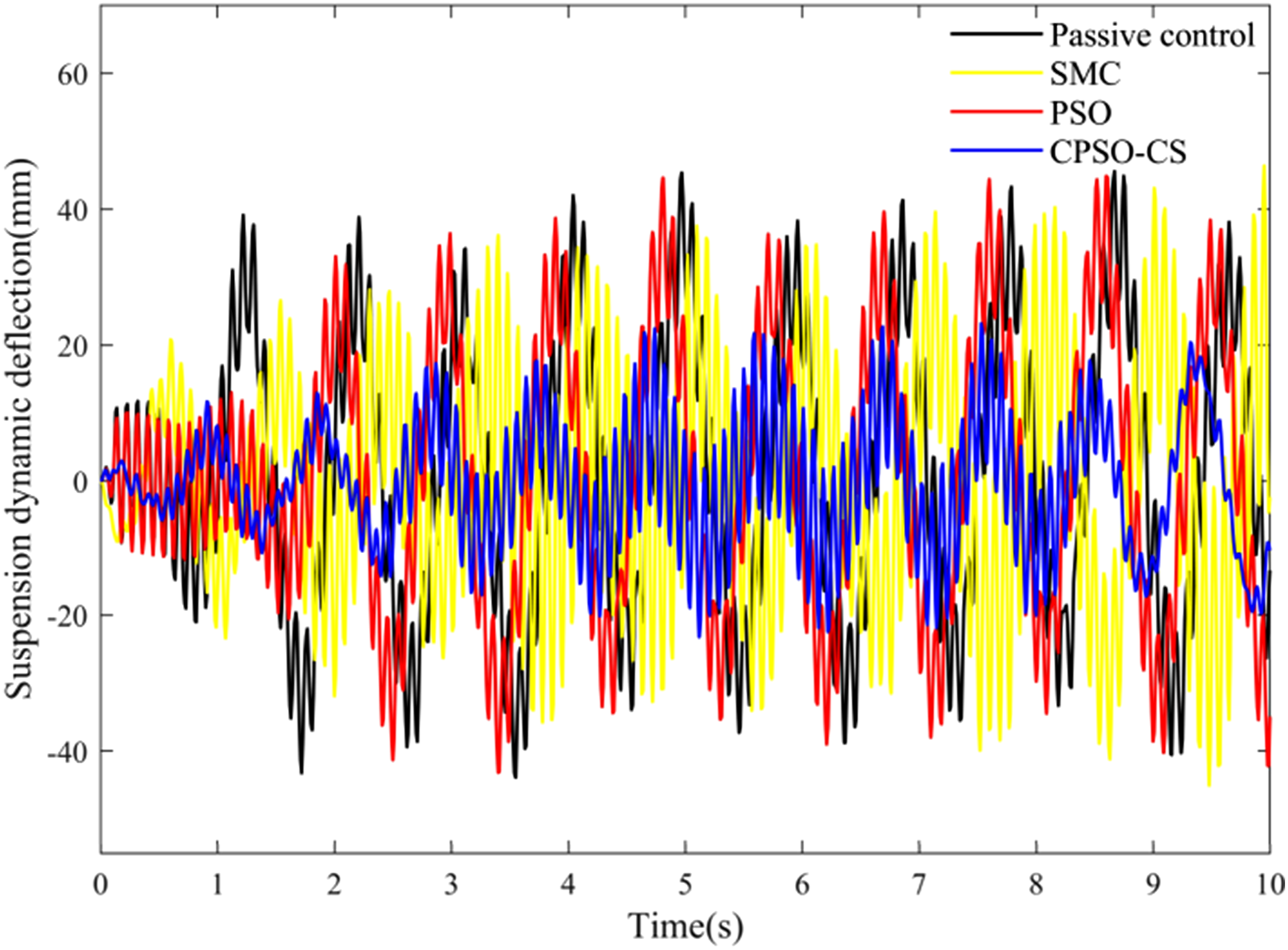
Suspension dynamic deflection.
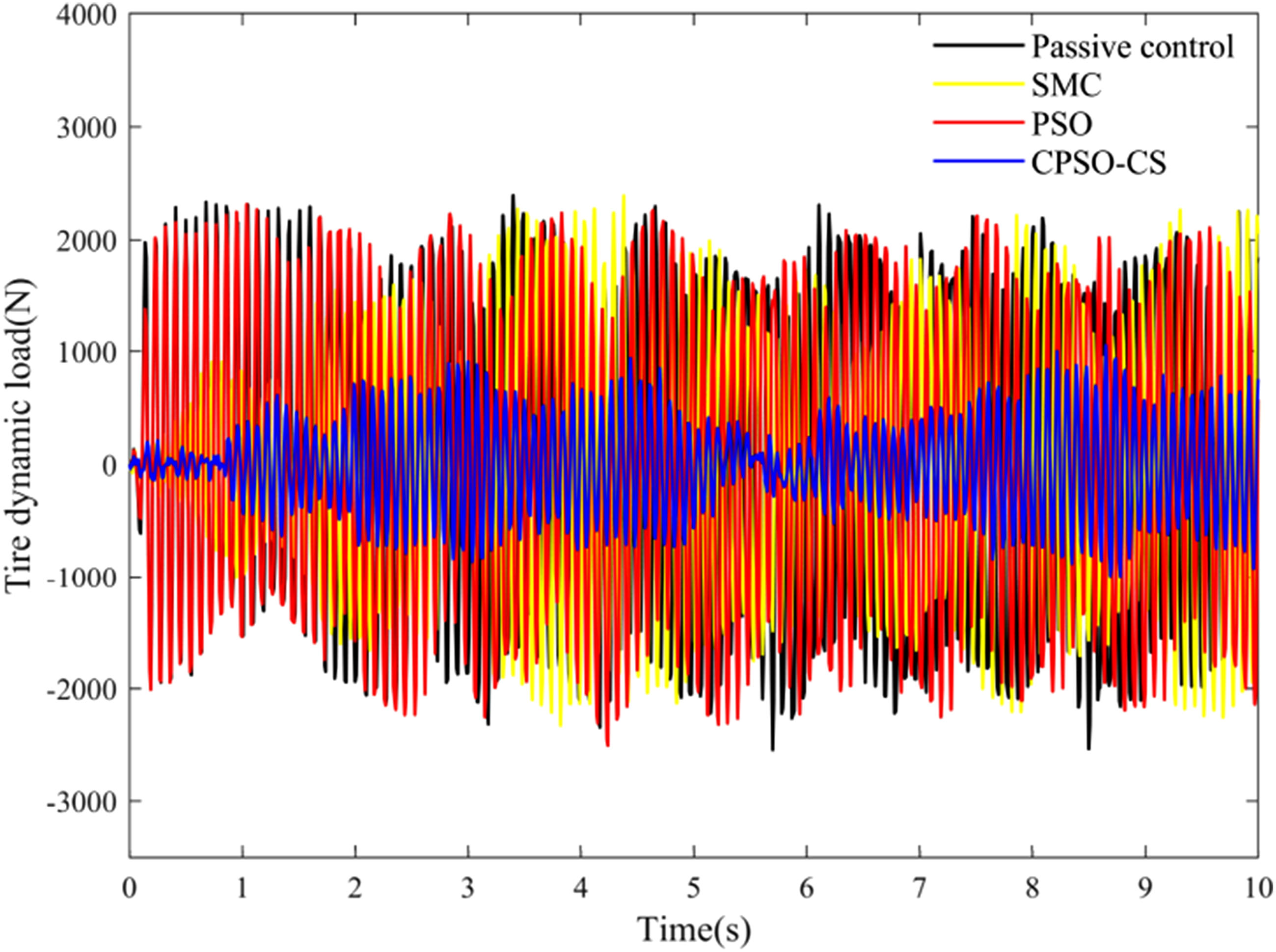
Tire dynamic load.
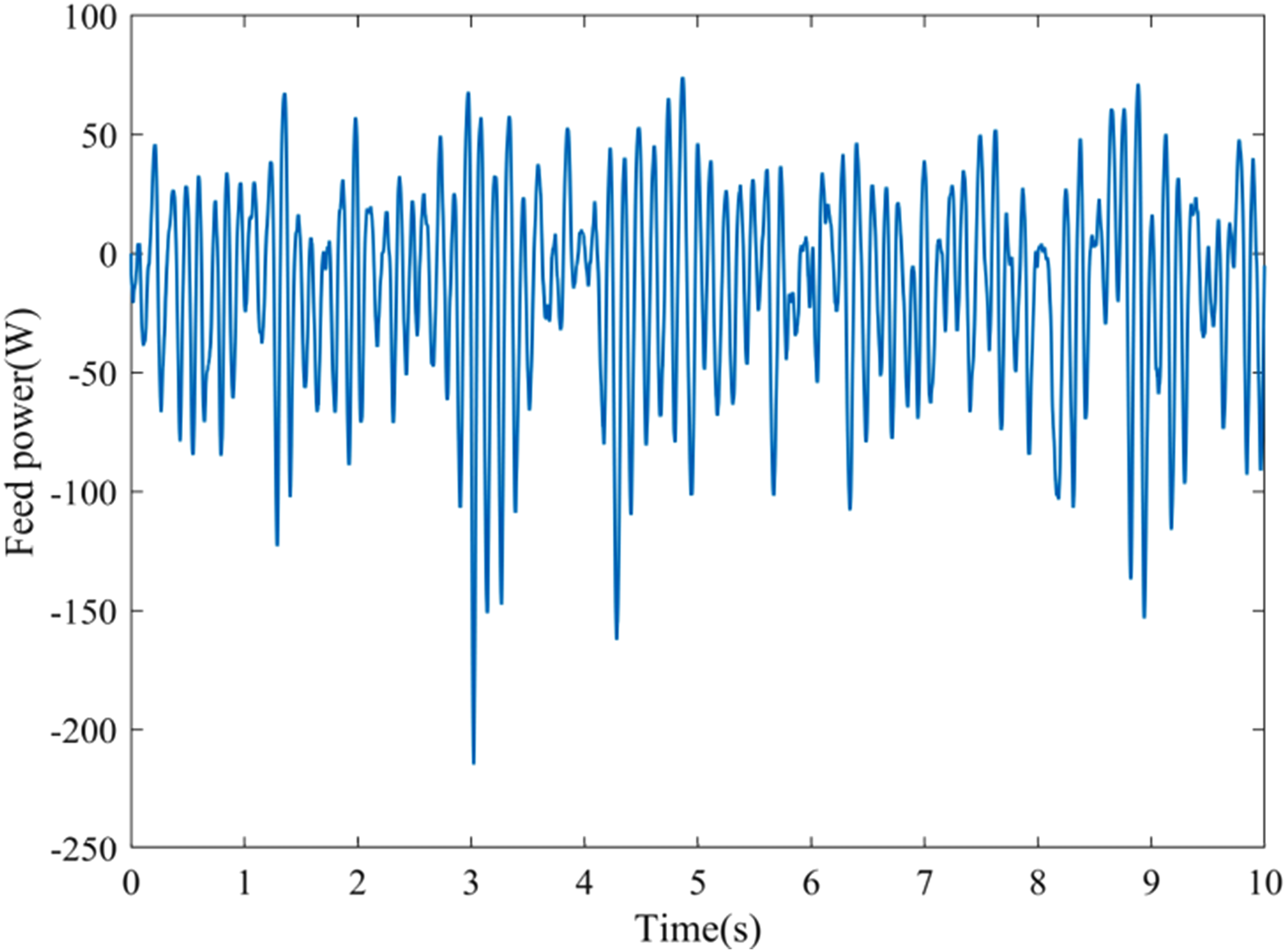
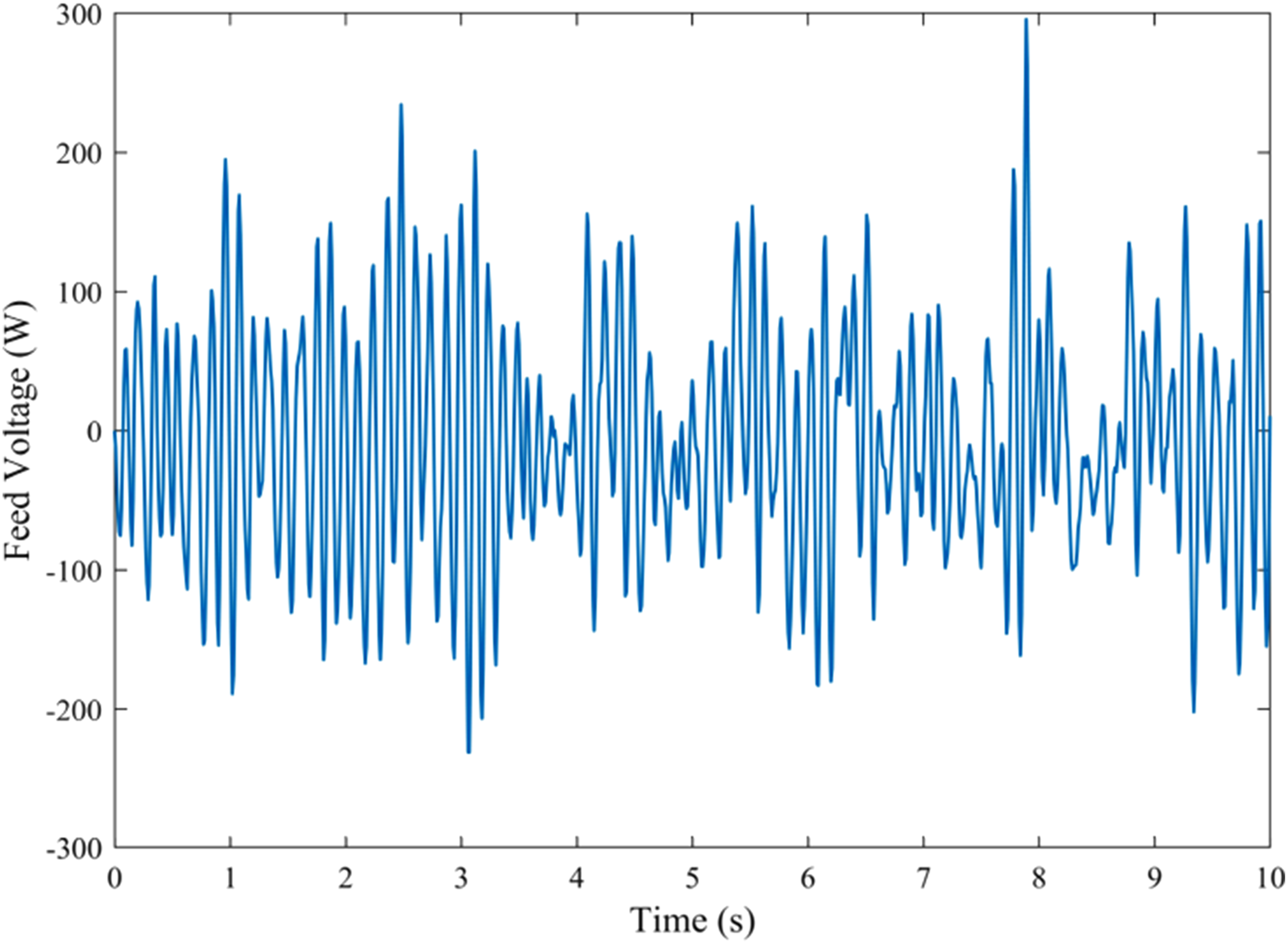
Feed power.
Acceleration.
Suspension dynamic deflection.
Tire dynamic load.
Feed power.
Figures 8–15 shows the time-domain response analysis of a 1/4 vehicle suspension model using traditional passive control, PSO, and CPSO-CS under B-Class and C-Class road excitations. Figures 8 and 12 show the time-domain response analysis of vertical body acceleration for traditional passive control, SMC, PSO, and CPSO-CS; Figures 9 and 13 show the time-domain response analysis of suspension dynamic deflection for traditional passive control, SMC, PSO, and CPSO-CS. Figures 10 and 14 show the time-domain response analysis of tire dynamic load for traditional passive control, SMC, PSO, and CPSO-CS; Figure 11 shows the suspension system energy feed power during B-Class road surface excitation. Figure 15 shows the energy feed power of the suspension system during C-Class road surface excitation.
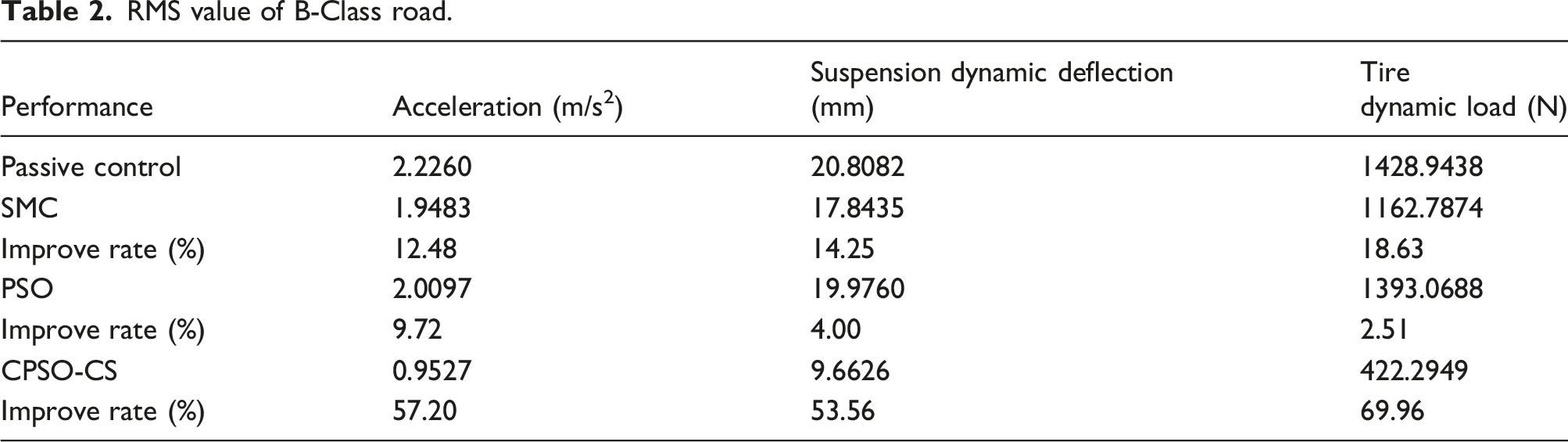
In this study, the RMS method was adopted to evaluate and statistically analyze three key performance indices, namely vertical body acceleration, suspension dynamic deflection, and tire dynamic load, thereby providing a more accurate quantitative assessment of suspension performance.
RMS value of B-Class road.
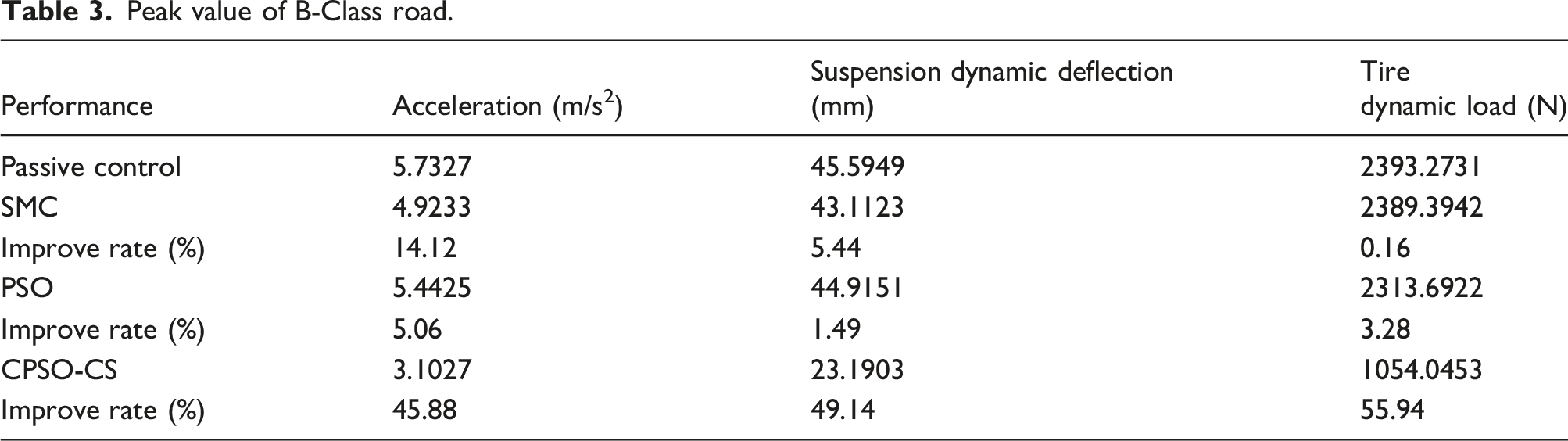
Peak value of B-Class road.
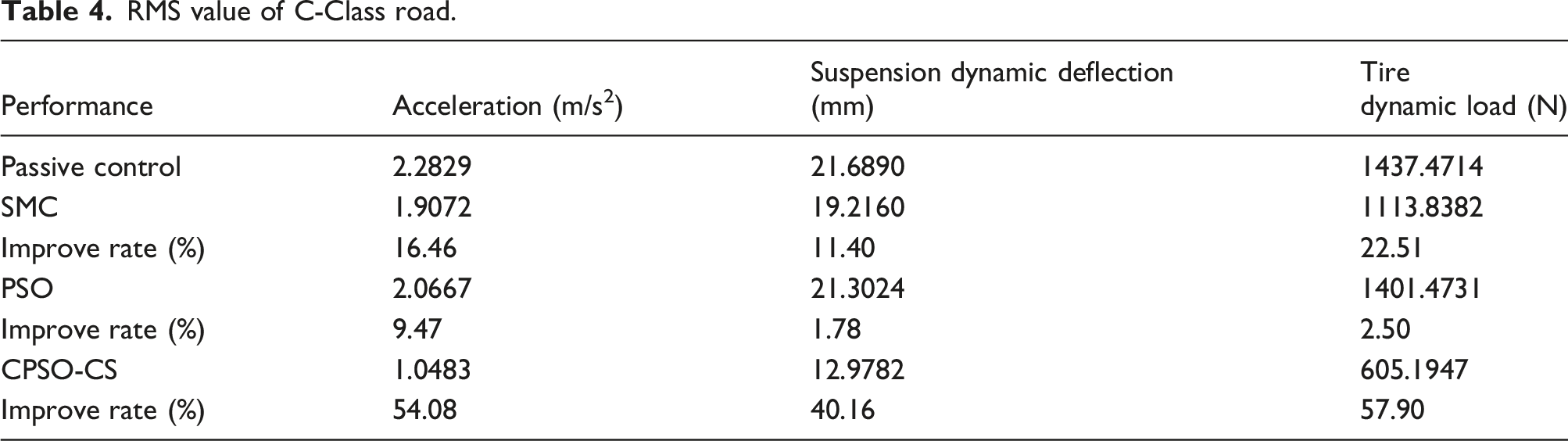
RMS value of C-Class road.
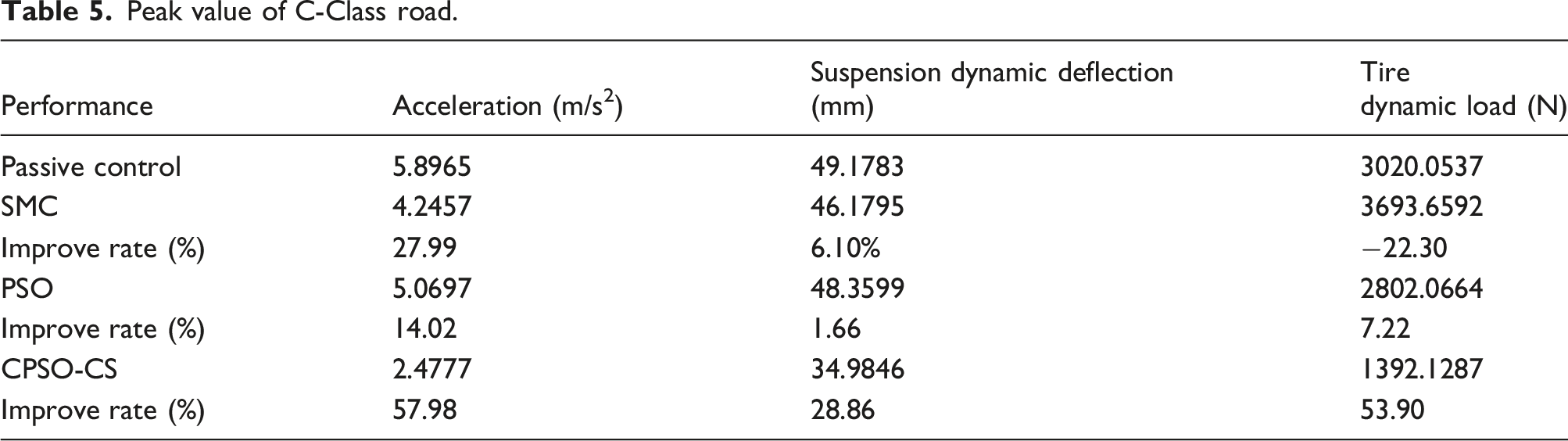
Peak value of C-Class road.
The convex road was selected as the disturbance signal: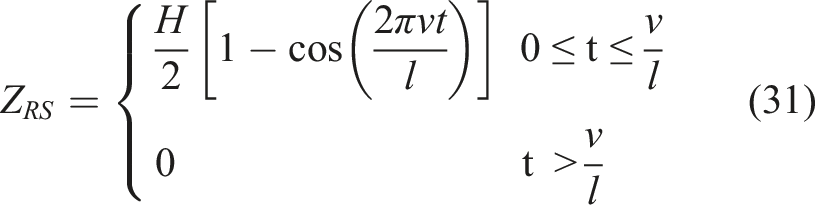
Select convex road excitation, set the vehicle speed to 20 m/s, run the established 1/4 vehicle suspension system model in MATLAB, and input the road excitation. The simulation results are shown in Figure 16. Road input excitations.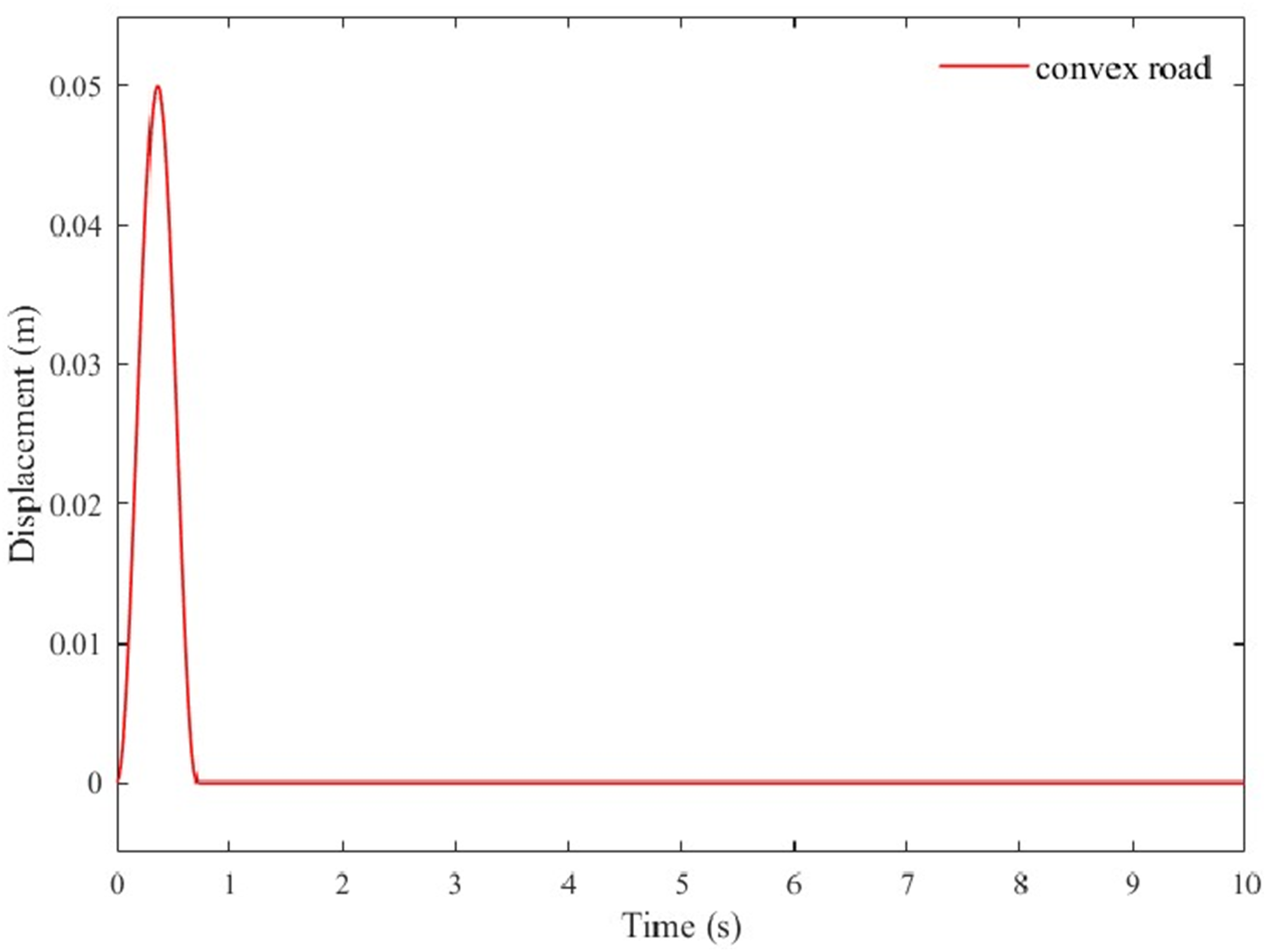
Figures 17–19 shows a simulation comparison of CPSO-CS with traditional passive control, SMC, and traditional PSO. The evaluation metrics for the suspension system include vertical body acceleration, suspension dynamic deflection, and tire dynamic load, all measured under convex pavement excitation. Figure 20 shows the energy feed power of the suspension system during convex road surface excitation. Acceleration. Suspension dynamic deflection. Tire dynamic load. Feed power.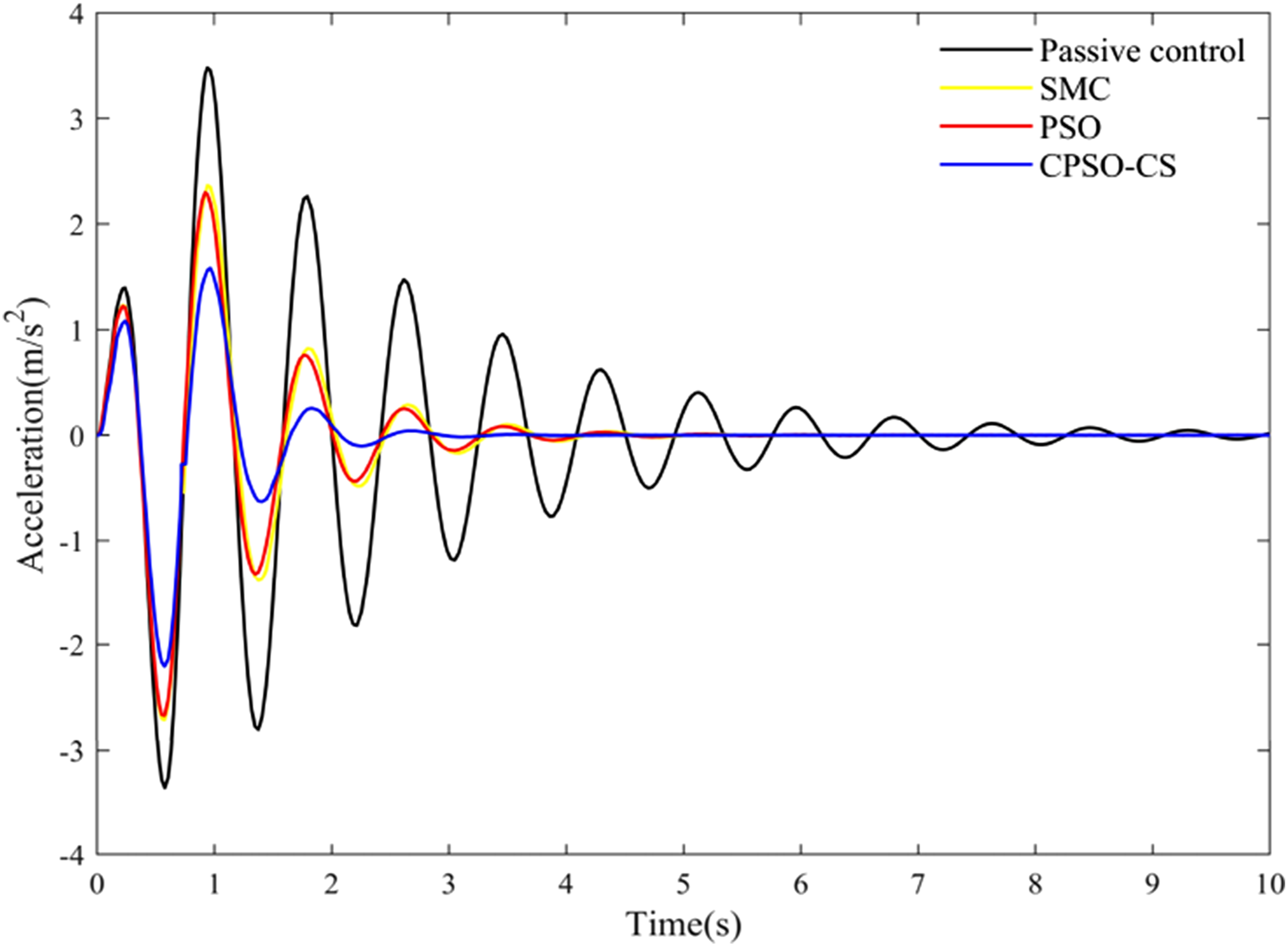
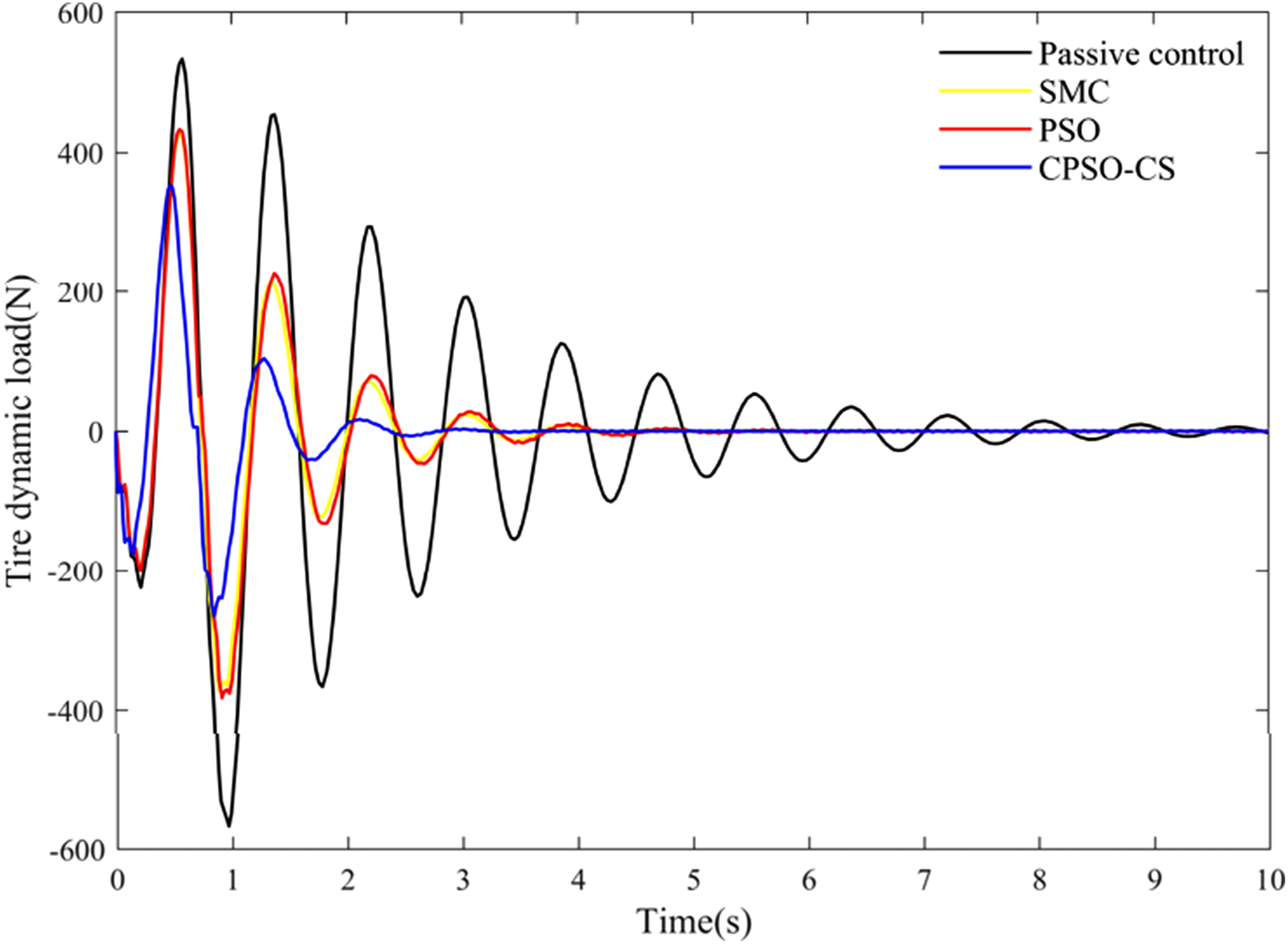
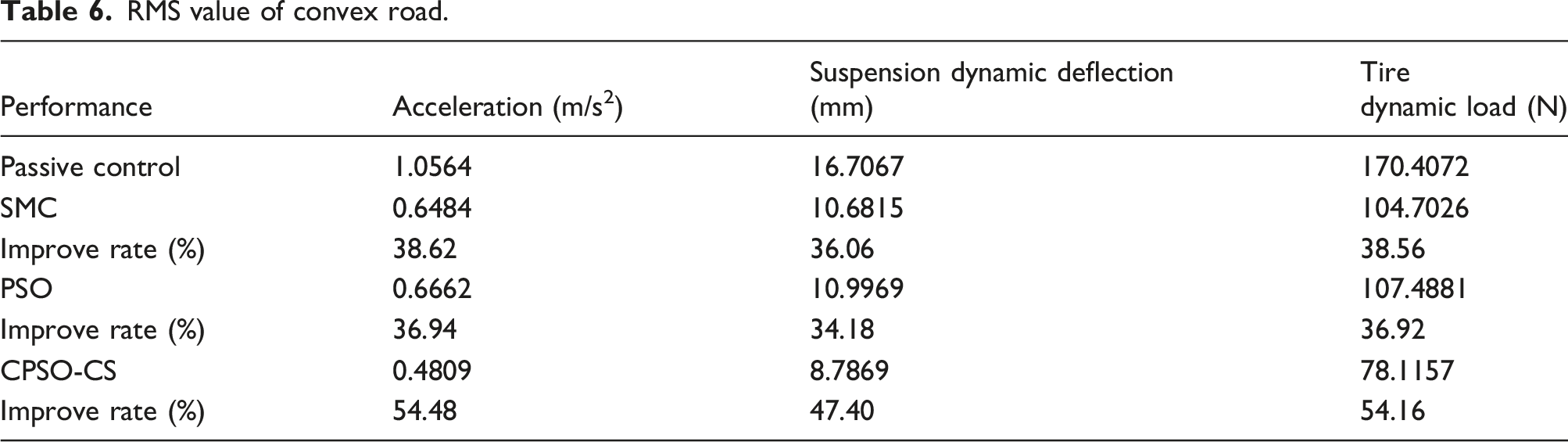
RMS value of convex road.
Peak value of convex road.
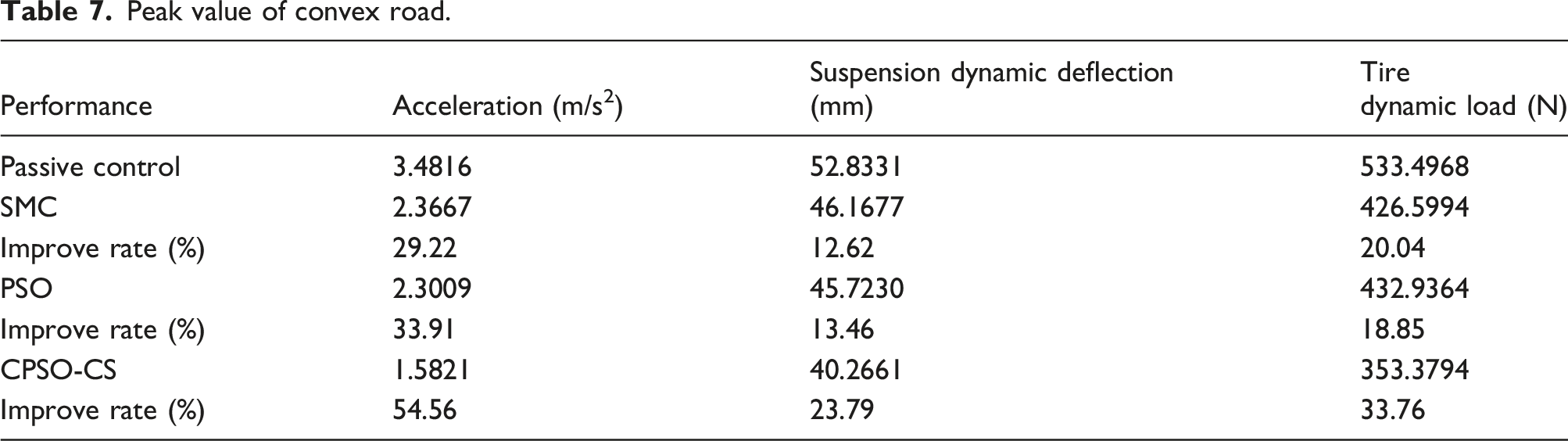
Statistical results based on root mean square (RMS) values indicate that the proposed optimization strategy can effectively improve suspension performance compared to passive suspension systems. Under B-class, C-class, and convex road surface excitations, the traditional PSO algorithm achieved only limited improvements across all three performance metrics, whereas the hybrid CPSO-CS achieved significantly greater reductions in both RMS and peak response. In particular, this hybrid algorithm demonstrates significant advantages in reducing body vertical acceleration, suspension dynamic deflection, and tire dynamic load, confirming its superior global optimization capability and better adaptability to complex road conditions. Therefore, this hybrid optimization method shows significant potential for improving ride comfort and road traction performance.
To address the parameter optimization problem of the hydraulic electric energy-feeding suspension system, an improved CPSO-CS algorithm is proposed in this study. A quarter-car two-degree-of-freedom dynamic model of the hydraulic electric energy-feeding suspension is established, and simulation experiments are conducted under Class-B, Class-C, and convex road excitations to verify the effectiveness of the proposed control strategy. The main conclusions are summarized as follows.
First, the improved CPSO-CS algorithm introduces innovations in three key stages, which effectively compensate for the limitations of the conventional PSO and CS algorithms. Specifically, Logistic chaotic initialization is employed instead of conventional random initialization to improve the uniformity of population distribution and the diversity of initial solutions. In addition, an adaptive inertia weight adjustment mechanism based on cloud theory is introduced to dynamically balance the global exploration and local exploitation capabilities according to particle fitness, thereby preventing the algorithm from being trapped in local optima. Furthermore, after the global search stage of CPSO, the Lévy flight-based local search mechanism of the CS algorithm is incorporated to perform refined exploration in the potential optimal region identified by CPSO, which significantly enhances the optimization accuracy.
Second, when applied to the hydraulic electric energy-feeding suspension system, the improved CPSO-CS algorithm exhibits excellent dynamic performance under both B-Class and C-Class road excitations. Compared with the conventional passive control strategy, the proposed method shortens the time required for vertical body acceleration, suspension dynamic deflection, and tire dynamic load to reach steady-state response, and significantly improves the RMS values of all three performance indices. Meanwhile, the peak values of these dynamic indices are also effectively suppressed. In particular, under C-Class road excitation, the peak vertical body acceleration is reduced by as much as 57.98%. Moreover, compared with the conventional PSO algorithm, the steady-state response time of the suspension system is shortened by more than 30%.
Third, the comprehensive performance of the improved CPSO-CS algorithm is significantly superior to that of the conventional PSO algorithm. Under B-Class road excitation, the maximum improvement achieved by the conventional PSO algorithm in the RMS value of vertical body acceleration is only 9.72%, whereas the improved CPSO-CS algorithm achieves improvements of more than 40% for all dynamic performance indices. By combining the cloud theory-based adaptive inertia weight mechanism with the CS-based refined local search strategy, the proposed method effectively overcomes the major drawbacks of the conventional PSO algorithm, namely slow convergence and susceptibility to local optima, thereby achieving a substantial enhancement in optimization capability.
Conclusion
In summary, comparative simulation results under B-Class, C-Class and convex road excitations show that the improved CPSO-CS algorithm proposed in this paper can reduce the RMS values of body acceleration, suspension dynamic deflection, and tire dynamic load by more than 20% under the three road excitation conditions, compared with the passive suspension. Compared with the traditional PSO algorithm, the standard CS algorithm, and the sliding mode control algorithm, the proposed algorithm provides more stable vibration suppression performance for the suspension under different road excitations, and achieves better convergence performance, with the number of convergence iterations reduced by more than 30% relative to the traditional PSO algorithm.
The improved CPSO-CS algorithm achieves higher optimization accuracy, faster convergence, and stronger resistance to local optima, with a convergence success rate of more than 95% across multiple road conditions. By introducing cloud-adaptive inertia weight, chaotic initialization, and a serial hybrid search strategy, this paper provides a practical and reliable optimization approach for the parameter design of hydraulic electric energy-feeding suspensions. The improved, algorithm-optimized comprehensive suspension performance can effectively enhance vehicle ride comfort and suspension energy regeneration efficiency across various road conditions, demonstrating clear engineering application value for the design and development of high-performance vehicle suspension systems.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (NSFC) (Ref. 52102443).