
Abstract
This study describes an X–Y platform driven by SMAs. The advantages of this platform are a simple mechanism design, low power consumption, and low cost. Unlike servo motor control, SMA can undergo thermoelastic martensitic transformation through increases in temperature above a certain level, which results in a pulling force that drives the platform. In the system described herein, an optical sensor is used to track the movements of the platform, which are then sent to a digital signal processor. An adaptive fuzzy sliding mode controller with parameters that are tuned online using the gradient descent method is used to enable the optimal tracking control of the X–Y platform.
Introduction
Recently, many new structures that contain smart materials such as electrorheological fluids, magnetorheological fluids, piezoelectric materials, and shape memory alloys (SMAs) have been designed. In 1951, Chang and Read discovered an AuCd alloy with a “shape memory effect.” This effect enables an alloy or a material to remember its original shape after being deformed by thermoelastic processes. Since the initial discovery by Chang and Read, many other alloys that possess shape memory have been discovered, including InTl, CuZn, and FePt.
In 1962–1963, nickel–titanium (TiNi) alloys were developed by the US Naval Ordnance Laboratory. These alloys have many good characteristics such as ductility, strength, anticorrosive resistance, and biocompatibility; therefore, they have become popular materials for use as SMAs. SMAs are commonly used in electric equipments, national defense systems, medical mechanisms, and control applications. For example, Salle (1999) and Pfeiffer et al. (1999) designed robotic arms composed of SMA, and Ikuta (1990) proposed that SMA can be used to construct a microactuator. Moreover, Kode and Cavusoglu (2007) recently developed a hybrid actuator composed of a motor and an SMA. Additionally, Choi and Hwang (2000) developed an active vibration control system that used SMA, whereas Lee et al. (2006) designed a platform supported by four SMA suspension springs. Hino and Maeno (2004), Qin et al. (2004), and Kim et al. (2006) used SMA to develop microrobots. Lim et al. (2001) incorporated SMA into the hard disk drive suspension for non-contact start/stop motion control between the head and disk. Finally, Ahn and Nguyen (2006) and Han et al. (2001) used SMA in a displacement control system.
In this study, we used four spiral SMA springs to drive an X–Y platform. In this system, each SMA spring was heated by applying current from two extremities. The system described here is more direct and simple than traditional motors and can avoid problems such as back clearance, driven loss, and gear friction. Because this platform was driven directly by the SMA, the system does not require any power transmission devices such as gears, lead screws, or power grips.
SMA usually has non-linear, uncertainty, and time-varying problems, which makes it difficult to identify the relationship between heat conditions and the generated force. For example, a step input response shown in Figure 3 in the study by Han et al. (2001) exhibited a non-linear dependence of the generated force on the input current. In the meantime, the time constant at the heating stage (rising) was quite different from the time constant at the cooling stage (falling) and they were uncertain and time-varying once the SMA springs under operations. In addition, a non-linear hysteresis loop was depicted in Figure 19 in an SMA-actuated motion control system (Ahn and Nguyen, 2006). Therefore, some studies have used intelligence control to tackle these problems to improve the performance of SMA systems. For example, Ahn and Nguyen (2006) applied a self-tuning fuzzy PID controller for position control of SMA actuators. Ahn and Kha (2007, 2008) used a genetic algorithm and fuzzy logic control to model and control the SMA actuator. Additionally, Dhanalakshmi and Umapathy (2008) used SMA with a sliding mode control to realize active vibration control. However, few studies have used adaptive fuzzy sliding mode control (AFSMC) for SMA systems. Therefore, we applied AFSMC into the SMA-driven X–Y platform described in this study.
In the following sections, we derive AFSMC from traditional sliding mode control. The AFSMC can solve the chattering problem associated with traditional sliding mode control. Additionally, the adaptive update law in AFSMC given by the Lyapunov stability theory can solve the time-varying problem encountered when heating/cooling SMA. This method can also avoid identification of the details of the system parameters. The experiments conducted in this study will track a desired circular trajectory. Finally, a well-known proportional-integral-derivative (PID) controller and fuzzy sliding mode controller (FSMC, proposed by Yu et al., 2003) were compared with the proposed AFSMC.
System setup and mathematical modeling
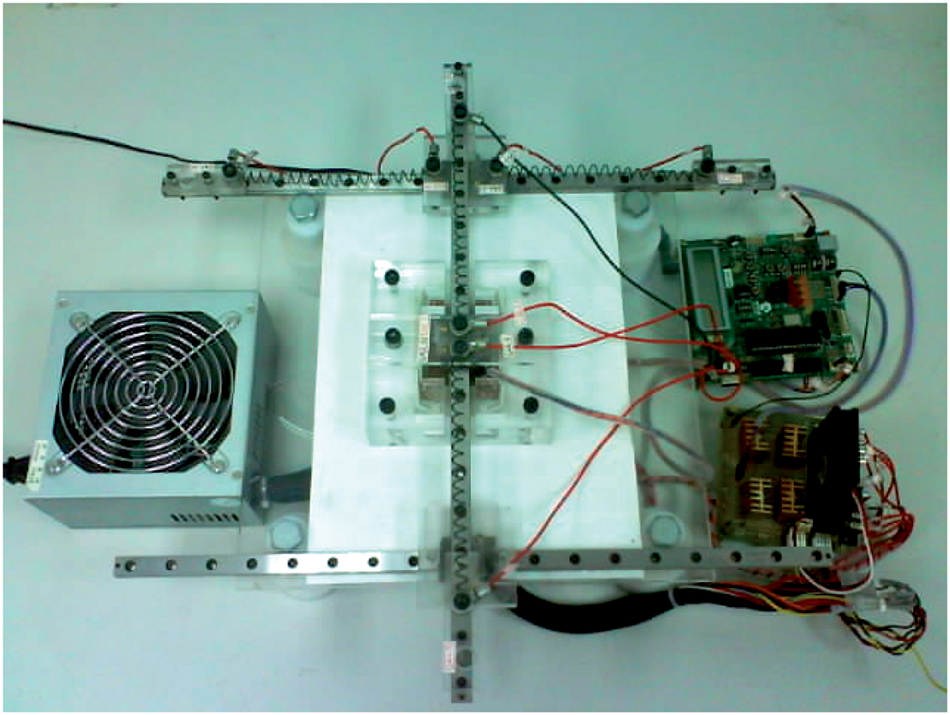
The schematic configuration of the spring SMA-actuated X–Y table developed here is shown in Figure 1, whereas Figure 2 is a photograph of the experimental devices, and Figure 3 shows a diagram of the control block of the X–Y table control system. It should be noted that due to the slower response of the SMA actuator during the cooling process, two methods are used: (1) we setup two spiral SMAs in each X- and Y-axis directions to increase the system response. For example, if the X-axis controller demands a positive input, the SMA at the positive X-axis is then heated while the SMA at the negative X-axis is shutoff, and vice versa. Similar control strategy applies to the Y-axis controller. (2) A fan placed nearby the platform is used to increase the heat convection, thereby improving the cooling effect of the shutoff SMA.
Sketch of X–Y platform with SMA. Photograph of experimental setup. Block diagram of X–Y table control system.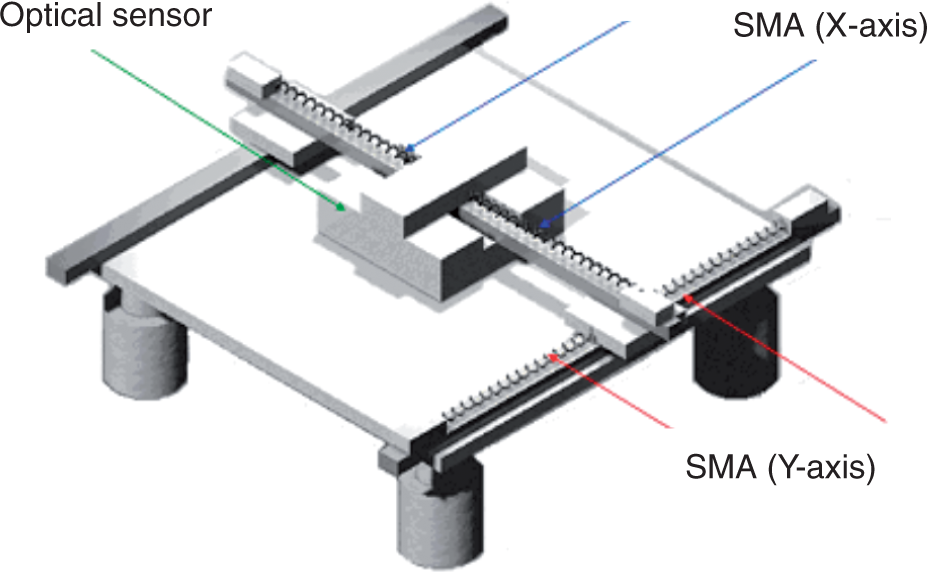
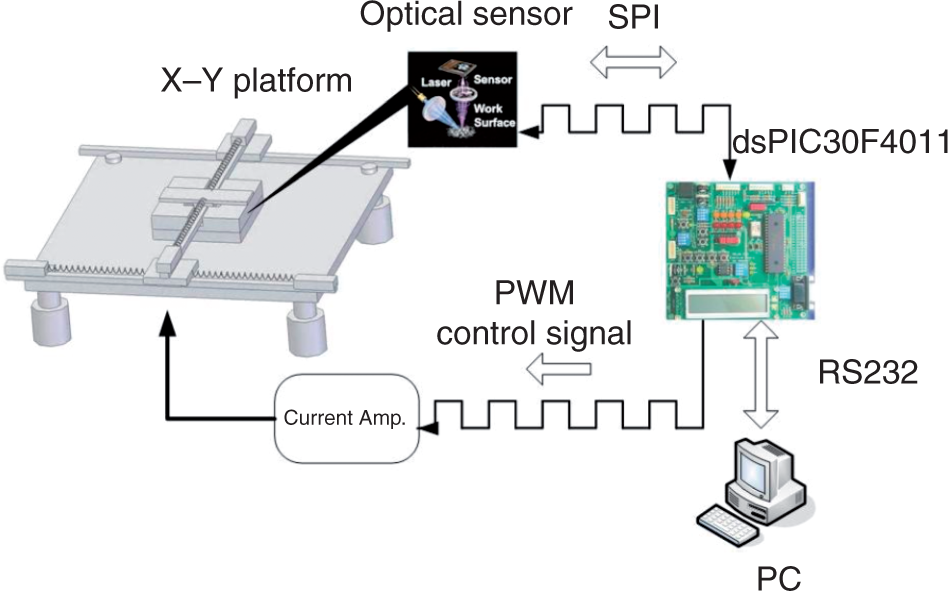
The digital signal processor (DSP, dsPIC30F4011) generated pulse width modulation (PWM) signals that were sent to the current amplifier and it subsequently heated the corresponding SMA. In this study, we used a laser mouse to monitor the platform movements and DSP to implement the control algorithms. The displacement of the X–Y platform was provided as feedback to the DSP by the serial peripheral interface (SPI) bus.
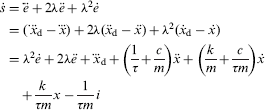
Because we used spiral SMAs to actuate the platform, the dynamic equation describing this system can be simplified in each direction as (Choi and Hwang, 2000):

The actuating force fa(t) with respect to the applied current i(t) can be simply described as a first-order differential equation:

Here, parameters m, c, k and τ are unknown. In fact, Equation (2) should be a non-linear function between the input current and the actuating force and τ is dependent on temperature, materials of SMA, and environmental conditions. It would be difficult to find a suitable expression for the time constant τ. In the next section, an adaptive FSMC is proposed to control the SMA-actuated X–Y table. Sliding mode control is a well-known robust non-linear control technique for disturbance rejection. The aforementioned non-linearity and the uncertain and time-varying coefficients associated with the SMA actuators can be lumped as system disturbances. However, the traditional sliding mode controller design needs to know the system nominal model and these disturbance bounds. Here, we include fuzzy control to avoid these difficulties. Finally, an adaptive algorithm is proposed to the combined FSMC to fine-tune the control parameters, so as to solve the time-varying properties of the time constants of SMAs for obtaining a precision motion control of the platform.
Adaptive FSMC design
Sliding mode controller design
In this section, traditional design procedures of the sliding mode controller for the X–Y table are briefly described. For the sake of brevity, controller design for the X-axis is given here. First, the sliding surface is defined as:

It is desired to have ṡ = −Ks/ϕ, where K > 0 is a constant and ϕ > 0 is the small thickness of the sliding surface. Next, the input signal i can be determined as follows:
Now, the Lyapunov function candidate can be selected as:

The time derivative of Equation (6) can be represented as:
From Equation (7), we can easily find that the system is uniformly stable and s ∈ L∞. By the equation ṡ = –Ks/ϕ, we can have ṡ ∈ L∞. To acquire the asymptotical stable, we need to prove that s ∈ L2. It can be proved by Equation (8):

Since s ∈ L∞ ⋂ L2 and ṡ ∈ L∞, by Barbalat's lemma (Slotine and Li, 1991), we can have asymptotical stability of the closed loop system.
Overall, we can determine the control force from Equation (5), after which we can derive the closed loop stability of the traditional sliding mode control using the Lyapunov stability criterion. However, it is necessary to determine the parameters in Equation (5), such as: m, c, k, and τ. It is not easy to identify these parameters exactly. Therefore, in the next subsection, we will propose an FSMC to solve for the unknown parameters.
Fuzzy sliding mode controller design
For Equation (5), it is necessary to identify the correct parameters of the system to enable proper operation of the traditional sliding mode controller. In this equation, m, c, k, and τ are the system parameters; x, ẋ, and ẍ are the measured states; and x
d
, ẋ
d
, ẍ
d
, and
Step 1
The sliding surface s = 2λė + λ2e to be the input variable of the FSMC was selected.
Step 2
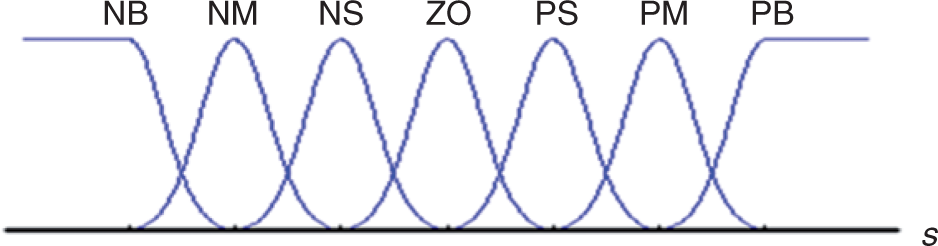
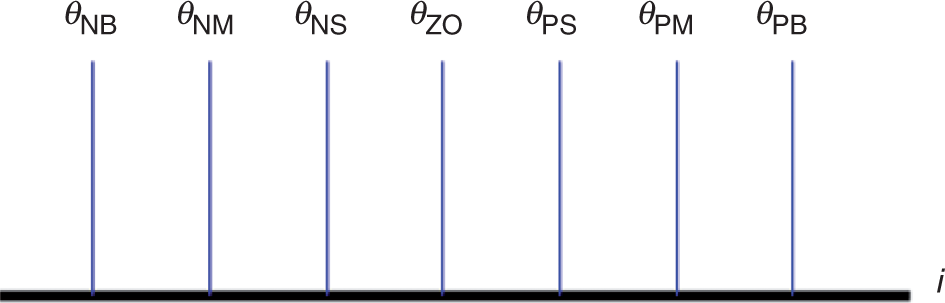
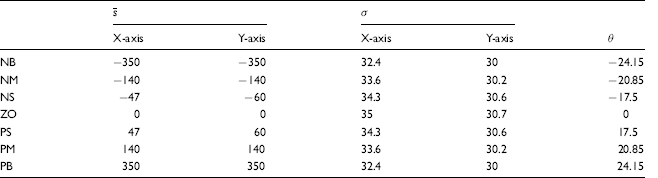
The linguistic variables and fuzzy partition for the input signal, s, were defined. Here, we used seven linguistic states Fj(j = 1,2, …, 7): Negative Big (NB), Negative Medium (NM), Negative Small (NS), Zero (ZO), Positive Small (PS), Positive Medium (PM), and Positive Big (PB). The seven linguistic states and the corresponding Gaussian membership functions are shown in Figure 4. The expression of the Guassian function is as follows:
Membership functions of input variable s.
Step 3

Derived fuzzy control rules

Membership functions of output variable i.
Step 4
The firing strength, ωj, of rule j is the grade of membership of s belonging to variable Fj:

The resulting discrete output signal composed of the effects of the seven control rules can then be obtained by using the weighted sum method as follows:

Here, FSMC can be used to solve the uncertainties associated with SMA. Because the characteristics of SMA varied with temperature, in the next subsection, we can apply adaptive law to update controller parameters of the FSMC to cope with the time-varying uncertainties.
Adaptive FSMC design
We propose an adaptive update law to tackle the time-varying uncertainty. First, the Lyapunov function candidate can be used as an energy function:

Based on the gradient descent method, Δ W = −γ(∂V/∂W), where γ is a learning rate and W is a parameter to be updated, which represents one of the controller parameters (
Note that [(∂ẍ/∂i) + 2λ(∂ẋ/∂i) + λ2(∂x/∂i)] is the Jacobian function of the system, which is difficult to obtain. Saerens and Soquet (1991) proposed that it can be replaced by its sign function for simplicity. The SMA spring is stretched before it is installed in the platform. Hence, a pulling force acting on the platform can be generated by the spiral SMA when heated. In addition, the pulling force is proportional to the applied current, as shown in Equation (2). Therefore, Jacobians of respect position, velocity, and acceleration of the platform to the applied current are all positive, i.e.,:

Hence, Equation (14) reduces to:

We can then update the parameters of the mean value, 

By substituting Equations (17–19) into Equation (16), we obtain:



Note that the above adaptation rules are obtained by using the gradient descent method, which will be convergent whenever the learning rate γ is chosen relatively small (Kuo and Morgan, 1996).
Experimental results
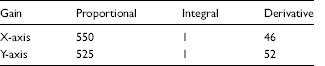
Parameters of PID controller
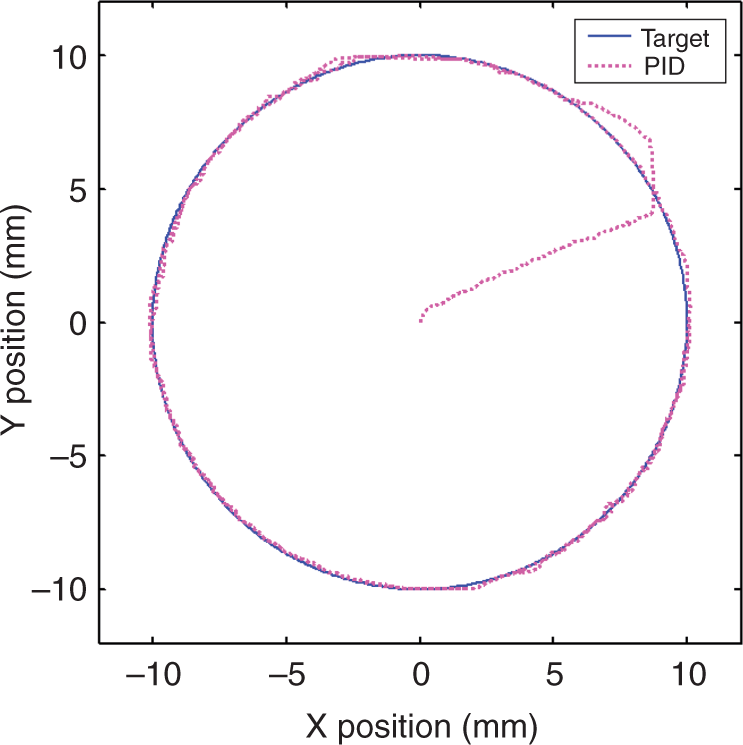
Displacement response of X–Y platform obtained using PID controller.
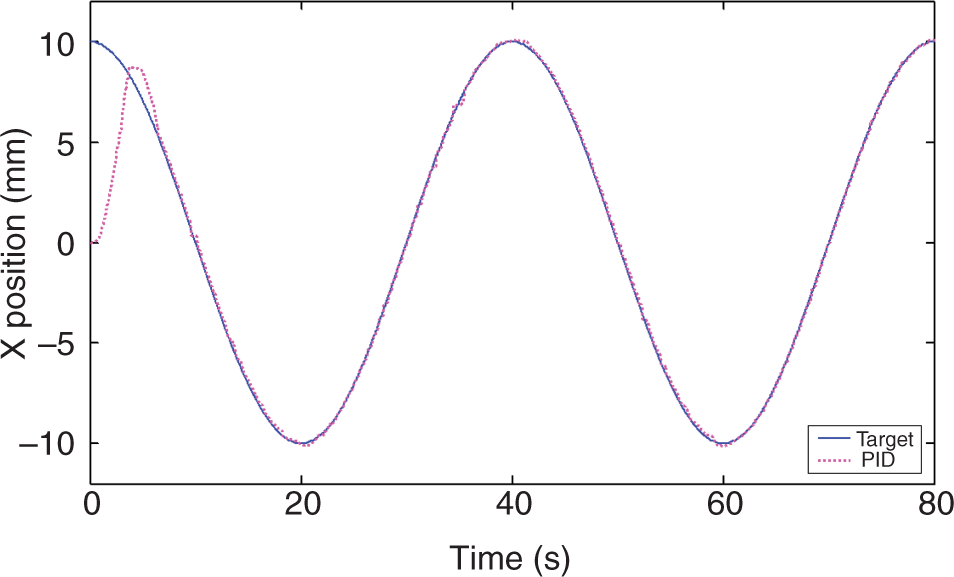
Displacement response of X-axis obtained using PID controller.
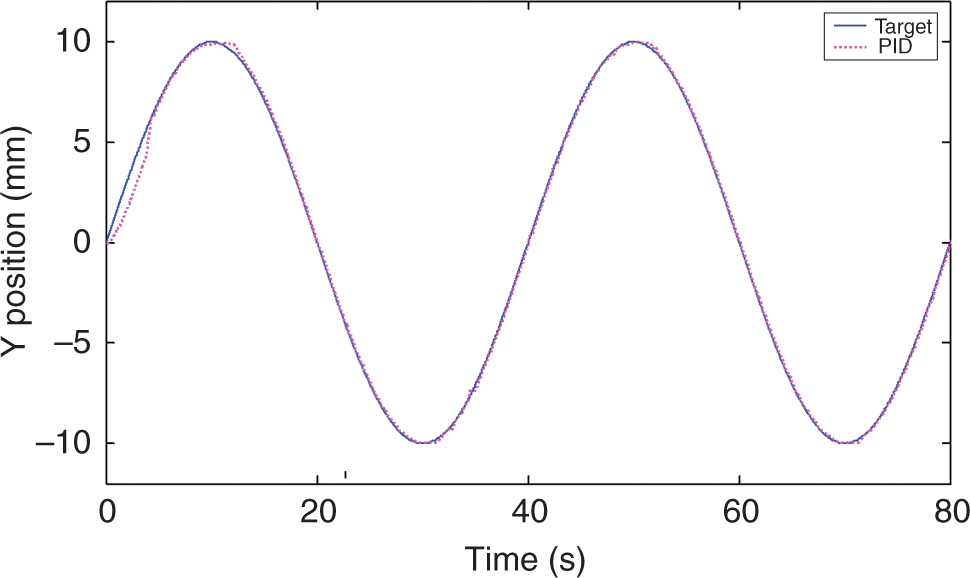
Displacement response of Y-axis obtained using PID controller.
Parameters of FSMC
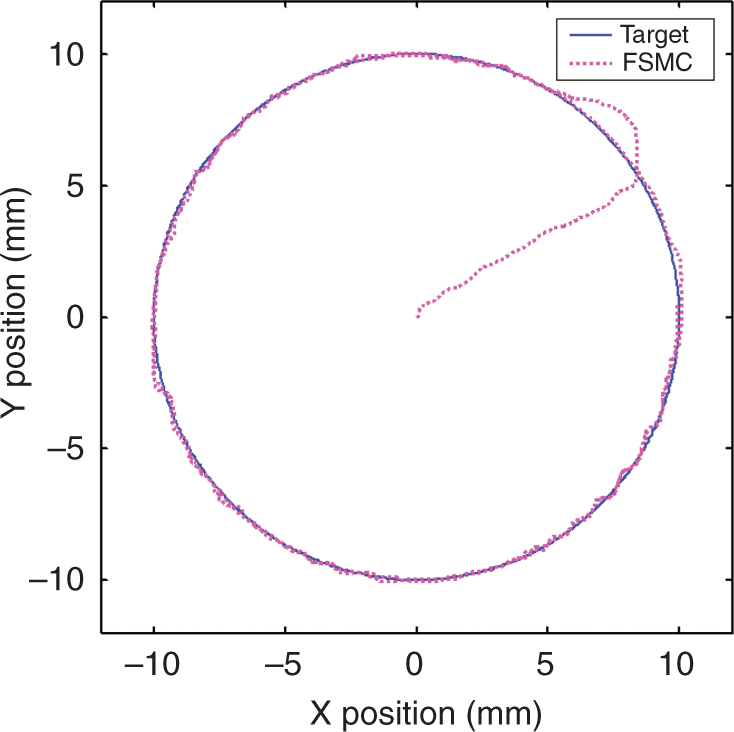
Displacement response of X–Y platform obtained using FSMC.

Displacement response of X-axis obtained using FSMC.
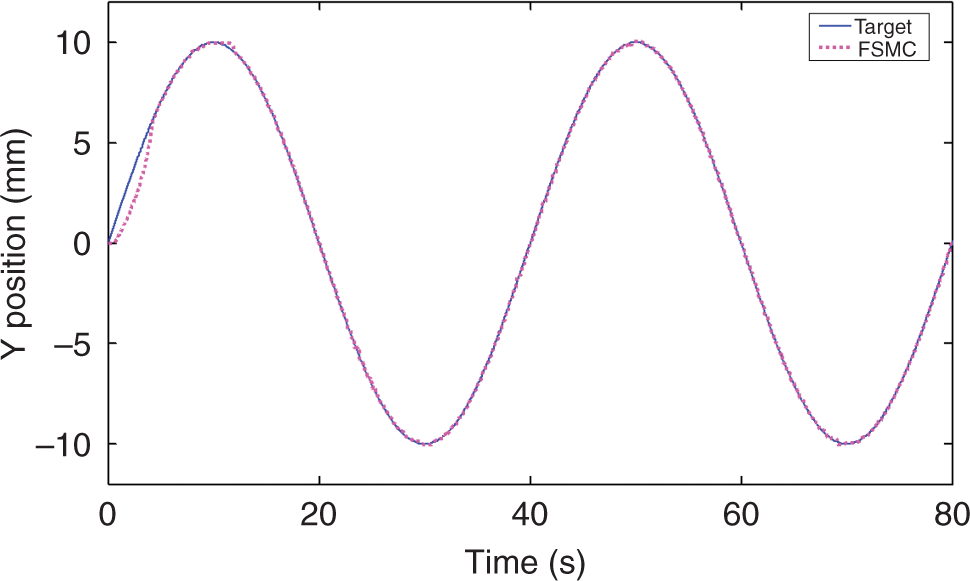
Displacement response of Y-axis obtained using FSMC.
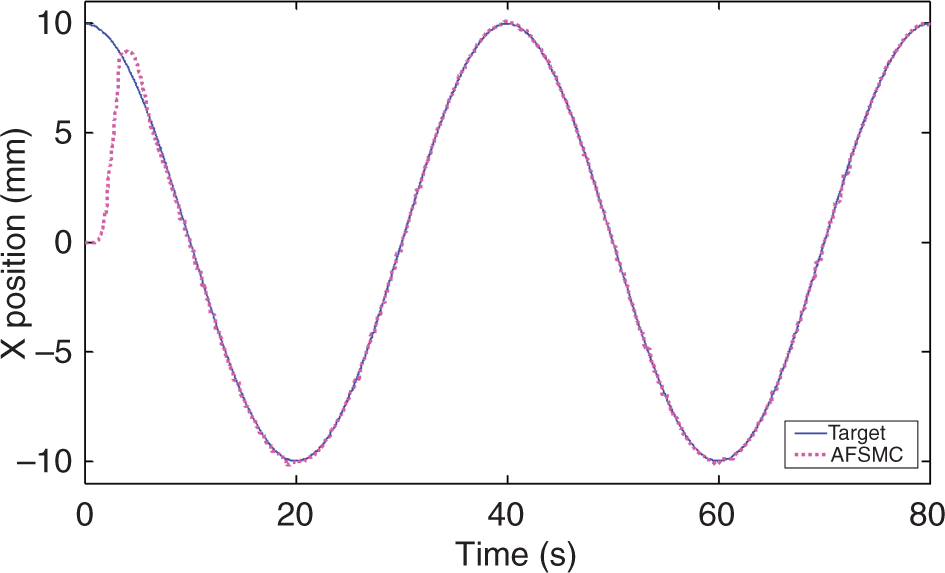
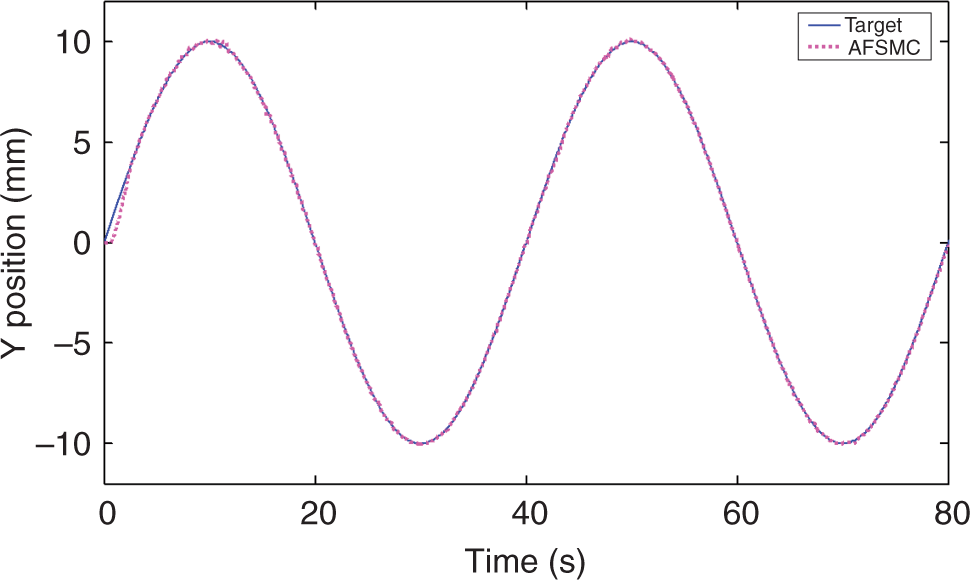
The initial parameters of the adaptive FSMC were selected from the aforementioned FSMC. Here, we selected a learning rate of γ = 0.3 to update this system, and the experimental results are shown in Figures 12–14.
Displacement response of X–Y platform obtained using AFSMC. Displacement response of X-axis obtained using AFSMC. Displacement response of Y-axis obtained using AFSMC.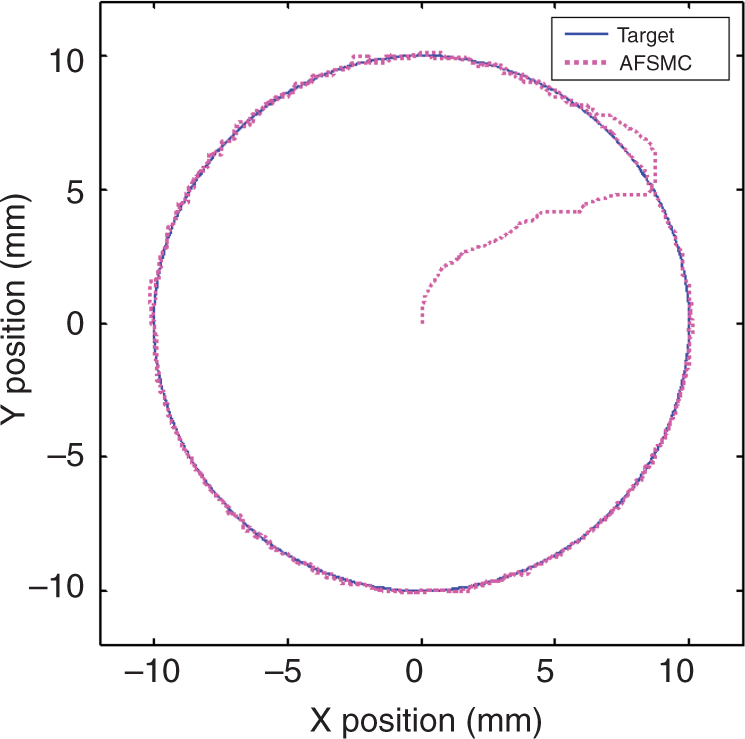
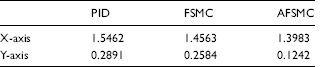
RMSE of three controllers
Conclusion
In this study, we describe an X–Y platform that is driven by spiral SMAs. Although this system contains uncertainties and time variations and although it is non-linear, we still can use control methods to improve its performance.
In the section describing the controller design, we provided a derivation of the controller in which the fuzzy logic control and sliding mode control are combined. The stability of the AFSMC was also demonstrated by using the Lyapunov stability theory. As listed in Table 4, AFSMC was better than FSMC and the PID controller. Non-linear controllers such as FSMC and AFSMC were employed and shown to be capable of tracking the desired trajectory. On the basis of the results obtained in this study, we inferred that when the system parameters are unknown or difficult to identify, FSMC can provide a convenient method of control. If the system varies with time and is non-linear, its parameters can be tuned online by using the AFSMC.
In future studies, a better cooling system for dissipating the heat of the SMA may be used to reduce the delay in the transient response. Alternatively, a different controller or an SMA-driven method (e.g., using four SMAs in the Y-axis instead of two) may be used to improve the control performance.
Footnotes
Acknowledgments
This work was supported by National Science Council, Taiwan, under grant number NSC 98-2221-E-027-025.