
Abstract
Theoretical and experimental investigation of dehydration loss of ionic polymer–metal composite actuator is important to evaluate the stability, accuracy, and effectiveness of actuation. An ionic polymer–metal composite actuator of silver electrode has been analyzed to demonstrate the effect of dehydration on vibration characteristics during actuation. Experiment is conducted in cantilever configuration under direct current potential, and the bending and vibration characteristics are measured by Laser Vibrometer. As dehydration occurs during the actuation process, these experimental data are used to establish empirical model for loss-factor in terms of input voltage and time using Cobb–Douglas production method. A correlation is also developed for tip deflection with applied voltage. For theoretical investigation, multimode approximation has been taken into consideration and extended Hamilton’s principle is applied for developing the governing equation of motion of the actuator. Few modes are taken into consideration, and the equations are solved numerically to obtain the transient and steady-state responses of the actuator. Theoretical steady-state results are compared and validated with the experimental results. Both theoretical and experimental results show the gradual reduction of tip displacement due to dehydration.
Keywords
Introduction
Artificial muscle materials such as electroactive polymers (EAPs) mimicking the biological actuating devices are attracted much attention nowadays as new means of active actuator due to the similarity in mechanical properties, and easiness of actuation compared to that of biological systems. In the quest for advanced artificial muscle actuators, ionic polymer metal–composites (IPMCs) that belong to the class of EAPs are emerging as active materials having a wide range of applications as actuator and sensor (Bar-Cohen, 2001; Nemat-Nasser, 2002; Nguyen et al., 2008; Shahinpoor and Kim, 2001, 2005). The low-activation voltage, actuation capability in aqueous medium as well as in air environment, and light weight, makes the polymer actuator to respond that of natural muscle in many ways. The advantages make them particularly attractive for use anywhere, where a muscle-like response is desirable, including in medical devices, prostheses, microrobotics, toys, biomimetic devices, aerospace, and micro/nanoelectromechanical systems (Shahinpoor and Kim, 2005). IPMC shows considerable bending response to an applied electric potential (usually < 3 V) and produces voltage in the order of millivolts when deformed mechanically (Bonomo et al., 2008; Chen et al., 2007).
IPMC is usually composed of an ion-exchange polymer film (Nafion®; Ion Power, Inc., New Castle, DE, USA/Flemion®; Asahi Glass Co., Ltd., Japan) membrane, saturated with water or ionic liquid, sandwiched between two thin electrodes made up of high-conducting pure metals such as gold or platinum. The electrode serves as a medium to maintain the moisture level in the base polymer, while the moisture content in the IPMC serves as a medium for ion migration. Nemat-Nasser and Li (2000), and Lee et al. (2005) reported that when an external voltage is applied across the thickness of the electrodes, cations inside the membrane migrate toward the cathode carrying the water molecules with them, which in turn results in the mechanical bending toward the direction of anode. Thus, the quantity of water present inside the polymer influences the actuation behavior of IPMC (Kim and Shahinpoor, 2003). However, for prolonged operation, electrolysis occurs beyond certain input voltage and also moisture dehydrates due to the applied electric potential, resulting in decrease of the performance of IPMC (Bandopadhya, 2009; Jung et al., 2003; Paquette et al., 2005; Shahinpoor and Kim, 2004).
Several studies have been carried out to find the effect of water content on the actuation performance of IPMC (Enikov and Seo, 2005; Lee et al., 2005; Nemat-Nasser, 2002; Nemat-Nasser and Wu, 2003; Yeh and Shih, 2010). A physics-based model has been developed to investigate the change in stiffness with hydration level and compared with experimental data (Nemat-Nasser, 2002; Nemat-Nasser and Wu, 2003). The results show that the stiffness of the IPMC is significantly influenced by the hydration level. Electrochemical and thermal experiments were conducted by Lee et al. (2005) to investigate the effect of water content on the actuation performance of IPMC. Using a cyclic voltammogram, they showed that the electric current is proportional to the water content in the IPMC under the same electric potential. A model has been proposed, and an experimental investigation is carried out by Enikov and Seo (2005) at high voltage (>1.2 V) to find out the effect of initial water content on the current and displacement. An experimental investigation has been carried out by Yeh and Shih (2010) to find out the effect of water content on the actuation performance of IPMC under actuation time of 7200 s with alternating current (AC) voltage. They showed that with the decrease in initial water content, the actuation performance of IPMC decreases, and maximum deformation of the IPMC is obtained when the initial water content is around 70%.
When a small actuating potential is applied to a fully hydrated IPMC actuator, it shows a considerable bending vibration at that applied frequency (Nemat-Nasser and Wu, 2006). An analytical model has been developed using Euler–Bernoulli beam theory, and the vibration response of an IPMC actuator subjected to an alternative electric potential was studied (Zhang and Yang, 2007). The vibration of a slender IPMC beam in a fluid medium is also analyzed using classical Euler–Bernoulli cantilever beam theory, and the interaction between IPMC and water is described by using the concept of hydrodynamic functions (Brunetto et al., 2008). An experimental and numerical study was carried out on thrust generation of a vibrating IPMC strip in salted aqueous medium (Kim et al., 2007). In order to understand the thrust generation mechanism of an IPMC actuator, the hydrodynamics of a vibrating cantilever IPMC along its fundamental mode shape in an aqueous environment has been numerically analyzed (Abdelnour et al., 2009). One-dimensional finite element model of a vibrating IPMC has been developed to analyze the effect of hydrodynamic loading on forced vibration (Dogruer et al., 2007). Volterra series has been used to identify the nonlinearities that arise in IPMC actuator during actuation response (Kothera and Leo, 2005). Furthermore, the effect of dehydration on the vibration characteristics of an IPMC actuator has been studied by considering the average moisture loss (Biswal et al., 2009), and IPMC was used as an active vibration attenuator in large bending vibration (Bandopadhya et al., 2007, 2008).
Past researches established the fact that an IPMC actuator dehydrates continuously in an open environment, reduces initial water content with the applied electric potential, and affects significantly the actuation performance of IPMC. However, past researches indicate that limited success or no work has been done to figure out and model the continuous dehydration of IPMC actuator during working condition. Furthermore, very limited research has been carried out to address the effect of dehydration on the vibration characteristics of IPMC. In this work, efforts are given to develop a new simple but robust empirical model from the experimental data to predict continuous loss of water contents in terms of input voltage and time in the open working environment. This dehydration model is then applied to study the effect of dehydration loss on vibration response. It is proven fact that during actuation, IPMCs experiencing low-amplitude vibration during bending motion influences the system accuracy and stability. The objectives of this analysis include the following points:
To investigate and evaluate the loss of water content (loss-factor) in the open working environment.
To analyze the vibration characteristics of IPMC actuator under direct current (DC) potential gradient.
To demonstrate the effect of dehydration on vibration response both theoretically and experimentally.
To estimate the moisture loss, experiment is conducted with an IPMC actuator with varying input voltage. At the beginning of the experiment, the moisture content is assumed to be 100% and then the dehydration is estimated gradually on account of bending deflection loss. Based on the experimentally obtained deflection data, a power fit correlation is established for “loss-factor” in terms of input voltage and time using Cobb–Douglas production method. Theoretical modeling of the actuator is done using multimode approximation of fixed-free configuration, and the governing equation of motion of the actuator has been derived by using the extended Hamilton’s principle incorporating loss due to dehydration. The obtained multidegree-of-freedom system equation has been solved numerically to obtain the transient and steady-state vibration responses. Several experiments are conducted to investigate the vibration characteristics, and the results are validated and compared with the dehydration model.
Calculation of loss-factor
An IPMC actuator of silver electrode is developed and prepared in the laboratory and cut into a size of 20 mm × 5 mm × 0.2 mm for the experimental study. A Nafion-117 membrane (Ion Power, Inc.) with a standard thickness of 0.183 mm is used as the base polymer for fabrication. The process comprises multisteps including pretreatment, adsorption, reduction, and development. Silver nitrate (AgNO3) with dilute ammonia solution (NH3) is used to prepare the diamminesilver(I) hydroxide, and Ag (NH3)2OH–silver complex solution is used for providing the cations (Ag+). Sodium hydroxide (NaOH) is used for providing Na+ cations into the membrane; dextrose anhydrous GR (C6H12O6), as an agent to reduce the silver cations into silver metal; hydrochloric acid (HCl), 2N solution, as cleaning agent; and finally, deionized/distilled water (Merck Specialities Pvt Ltd., Mumbai, India) is used for rinsing and washing. The detailed fabrication process is outlined in Biswal et al. (2011). The photographs of the Nafion membrane and the fabricated IPMC are shown in Figure 1(a) and (b), respectively.
Photograph of the (a) Nafion membrane and (b) Ag-IPMC.
Figure 2(a) shows the schematic diagram of bending configuration, while Figure 2(b) shows the experimental setup to obtain the bending characteristics of the IPMC actuator subjected to input voltage (V). The experiment is conducted in hydrated state in fixed-free mode. Voltage is applied from a DC power supply (0–32 V DC, 0–2 A) through copper strips attached to the fixed end. Subsequently, the tip deflection of IPMC is measured and the bending characteristics are calibrated. Experimentally, the dehydration loss is studied for the same IPMC sample subjected to an input voltage of 0.2–1.2 V with an increment of 0.2 V. Before starting the experiment, the IPMC is considered as fully hydrated, that is, moisture content is assumed to be 100% (reference value), while dehydration is zero. For each input voltage after 30 s (sufficient time is allowed to settle any back relaxation effect and to attain the steady-state), the tip position (
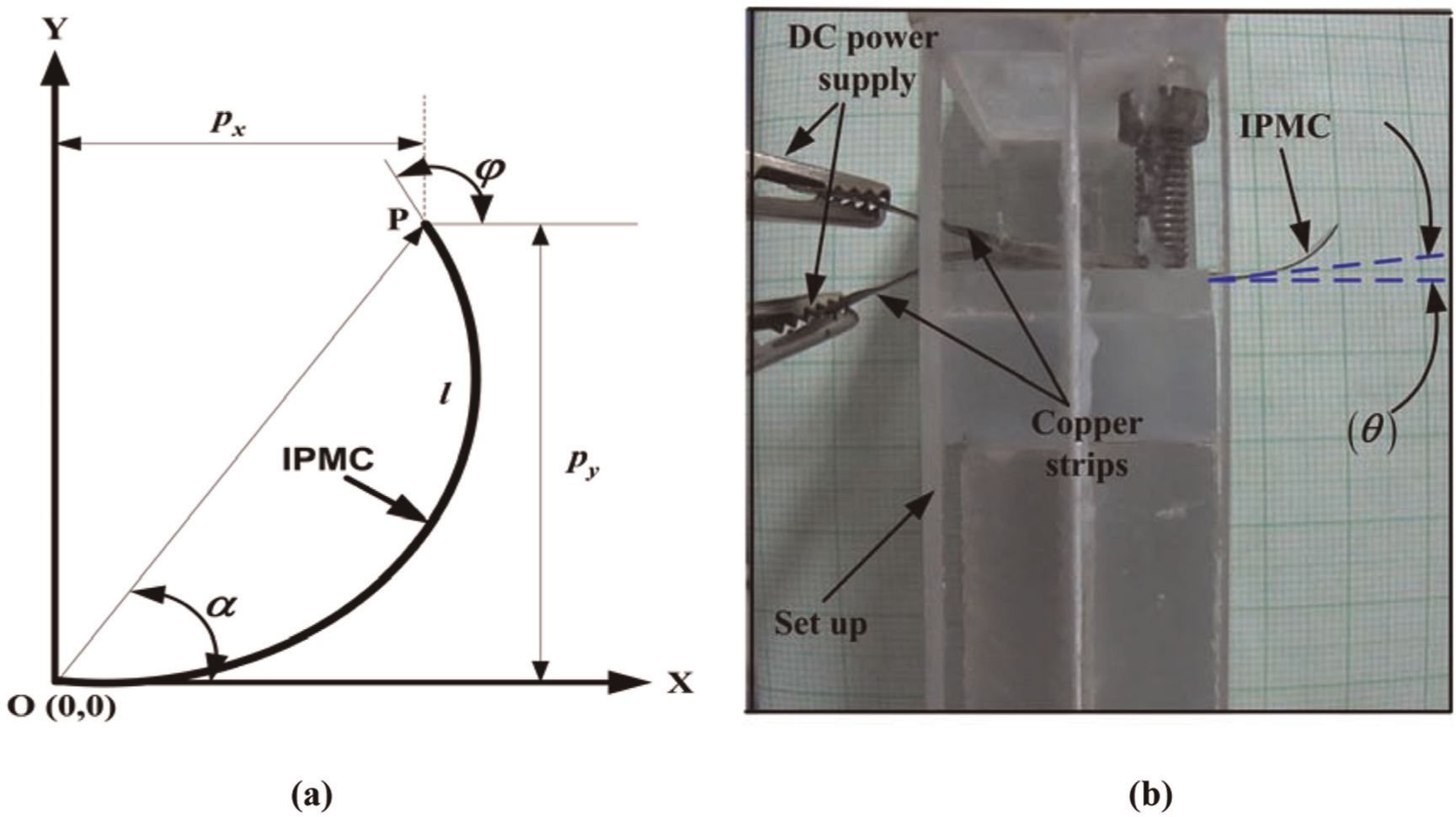
(a) Bending configuration and (b) setup for bending experiment of IPMC for an input voltage V.
Tip position and angle of IPMC actuator with “positive” and “zero” dehydration conditions.
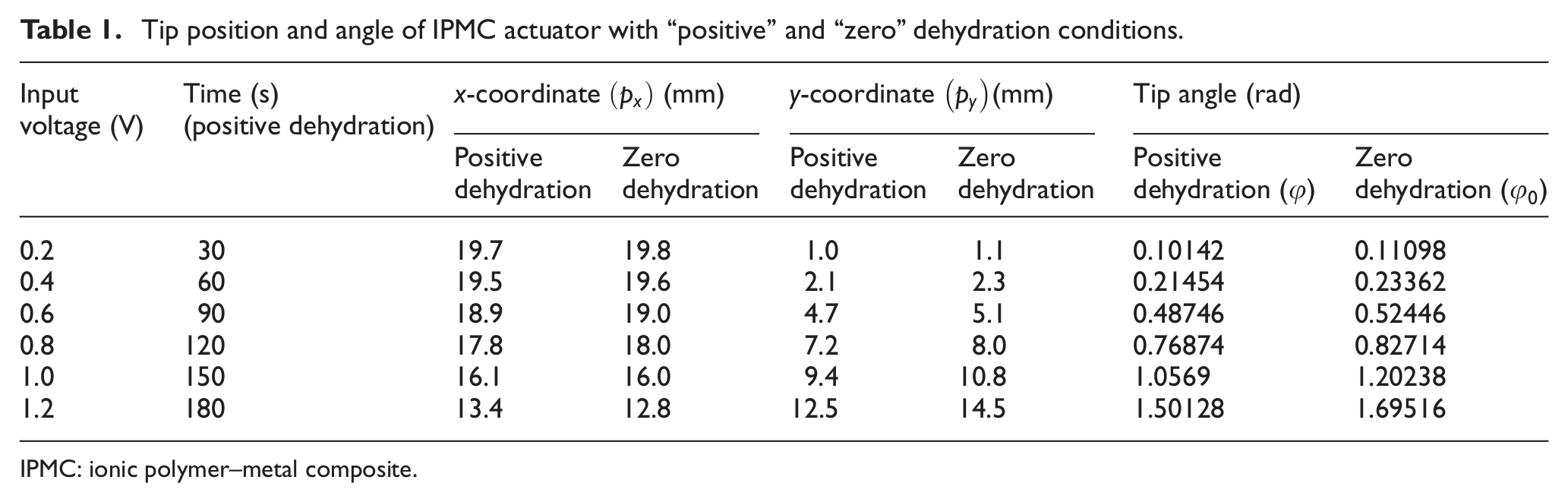
IPMC: ionic polymer–metal composite.
To obtain experimentally the tip position (
where,
Assuming pure bending, that is,

Simplifying equation (2), one can rewrite the equation as
where
where
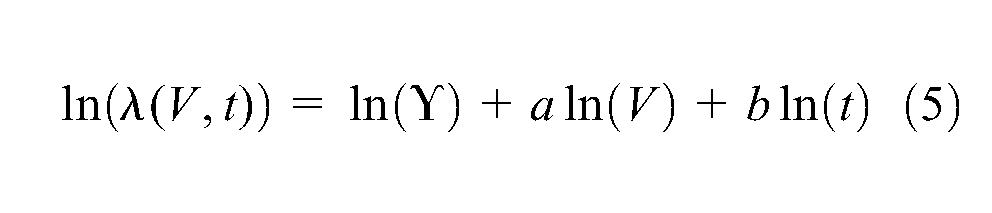
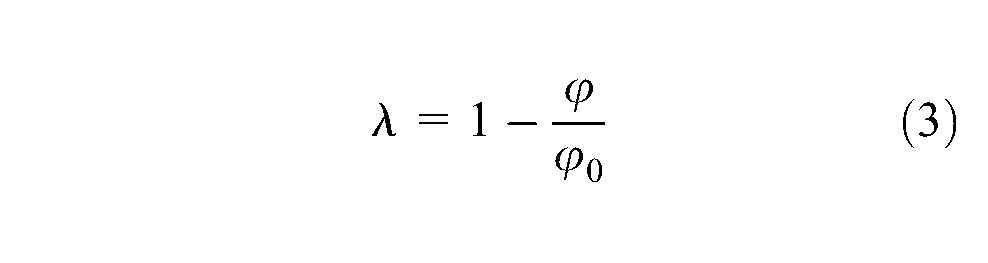
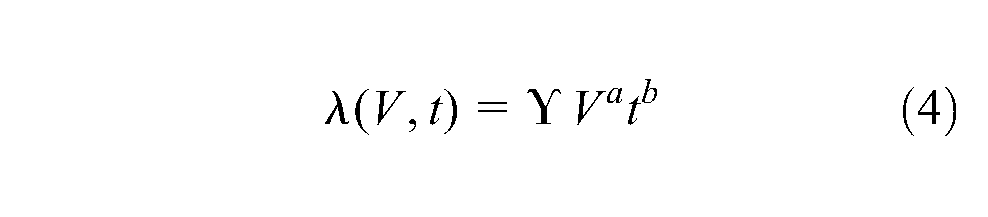
The goal is to develop a power fit correlation using Cobb–Douglas production method that correlates the loss-factor

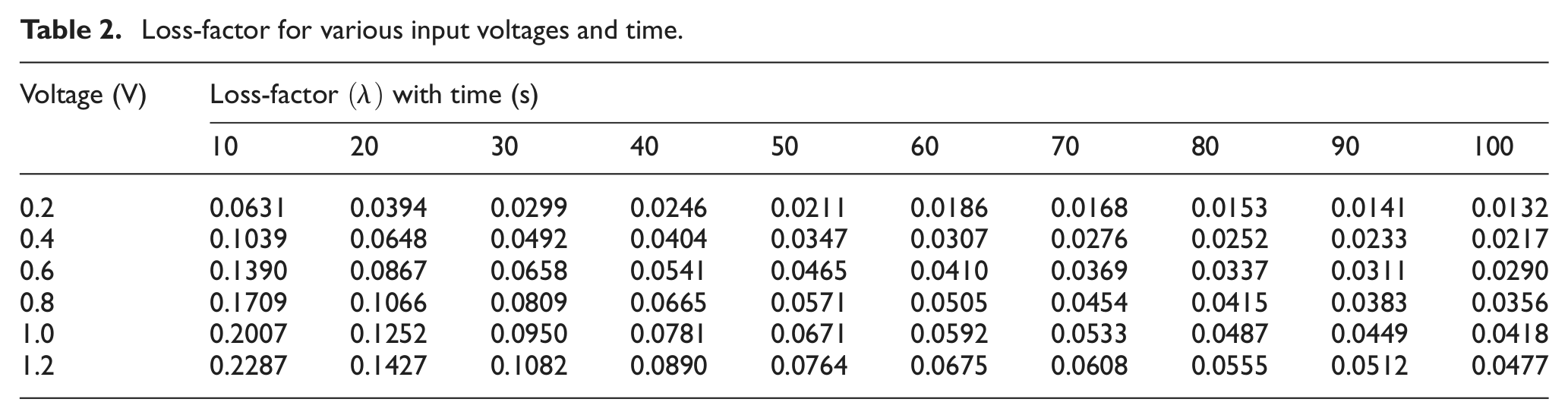
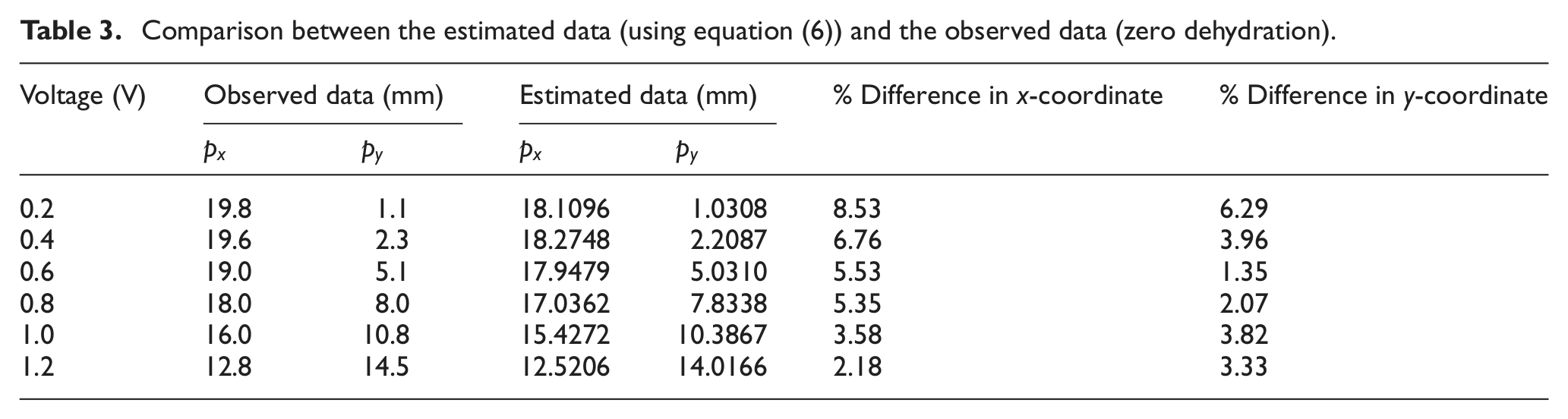
Loss-factor for various voltages with time has been calculated subsequently and is given in Table 2. It is observed that with constant input voltage, loss-factor decreases continuously with time, although it increases as the input voltage increases. Figure 3(a) and (b) shows the variation of loss-factor with actuation time and applied voltage, respectively. These results are in good agreement with the observation that initial water content decreases with time (Enikov and Seo, 2005) and also that larger electric potential causes more loss of water content (Yeh and Shih, 2010). Furthermore, it is observed that for a given input voltage, as the loss-factor decreases with time, there is a gradual reduction of actual bending moment and hence the tip deflection of the actuator. Table 3 shows both the estimated data (using equation (6)) and the observed data at zero dehydration for 30 s.
Loss-factor for various input voltages and time.
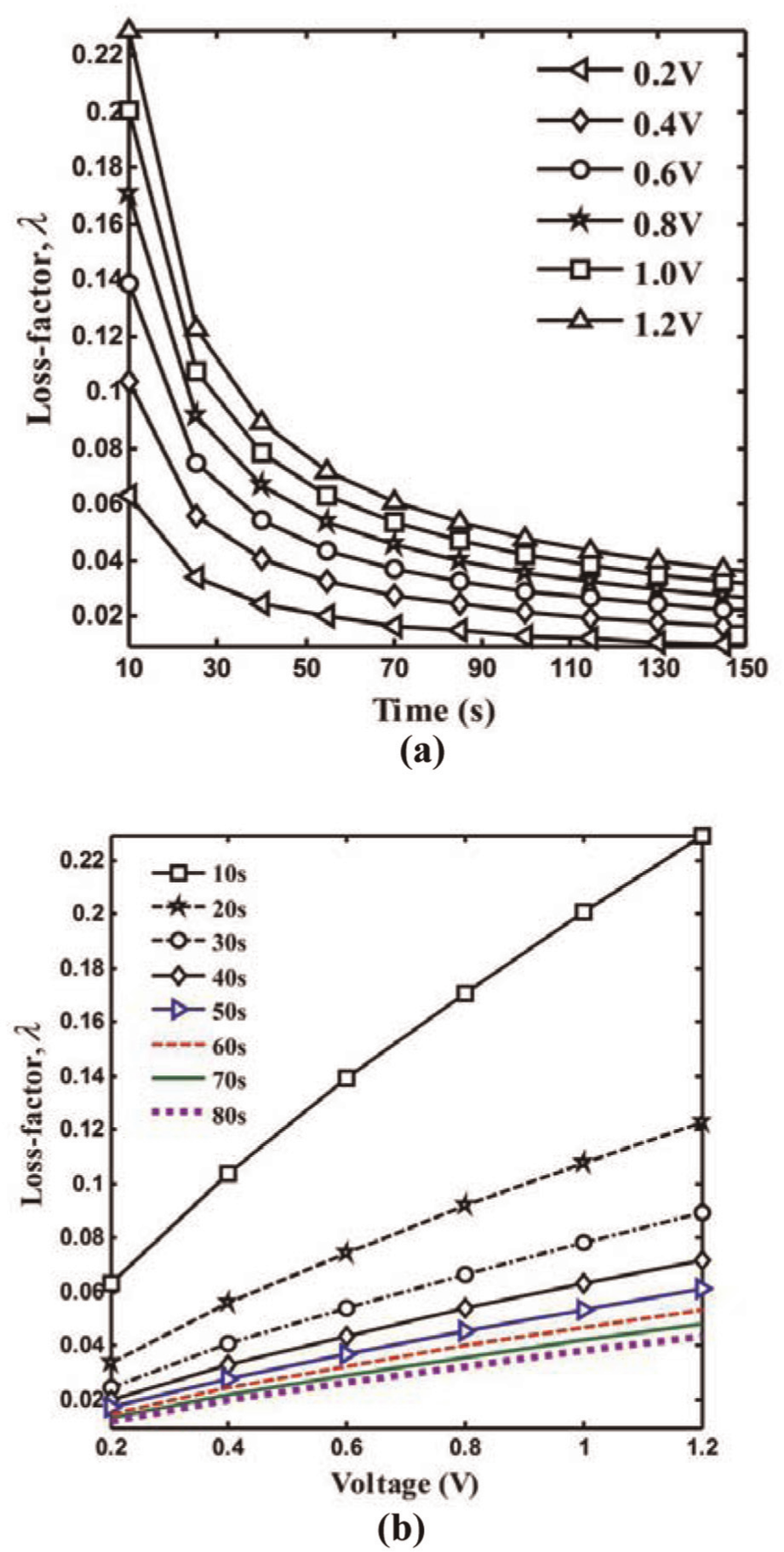
Variation of loss-factor with (a) time and (b) input voltage.
Comparison between the estimated data (using equation (6)) and the observed data (zero dehydration).
Bending characteristics of IPMC
The experimental data obtained, as given in Table 1, are used to establish relationship between bending moment and tip deflection with input voltage. Treating IPMC as continuous distributed parameter system with large deflection bending problem and using the Euler–Bernoulli bending-curvature relationship, one can establish the following relationship
where
Similarly
The bending moment and force generated by the actuator are obtained as
The experimental data for tip position
Similarly
Change in tip position with input voltage: (a) y-coordinate and (b) x-coordinate of the tip position.
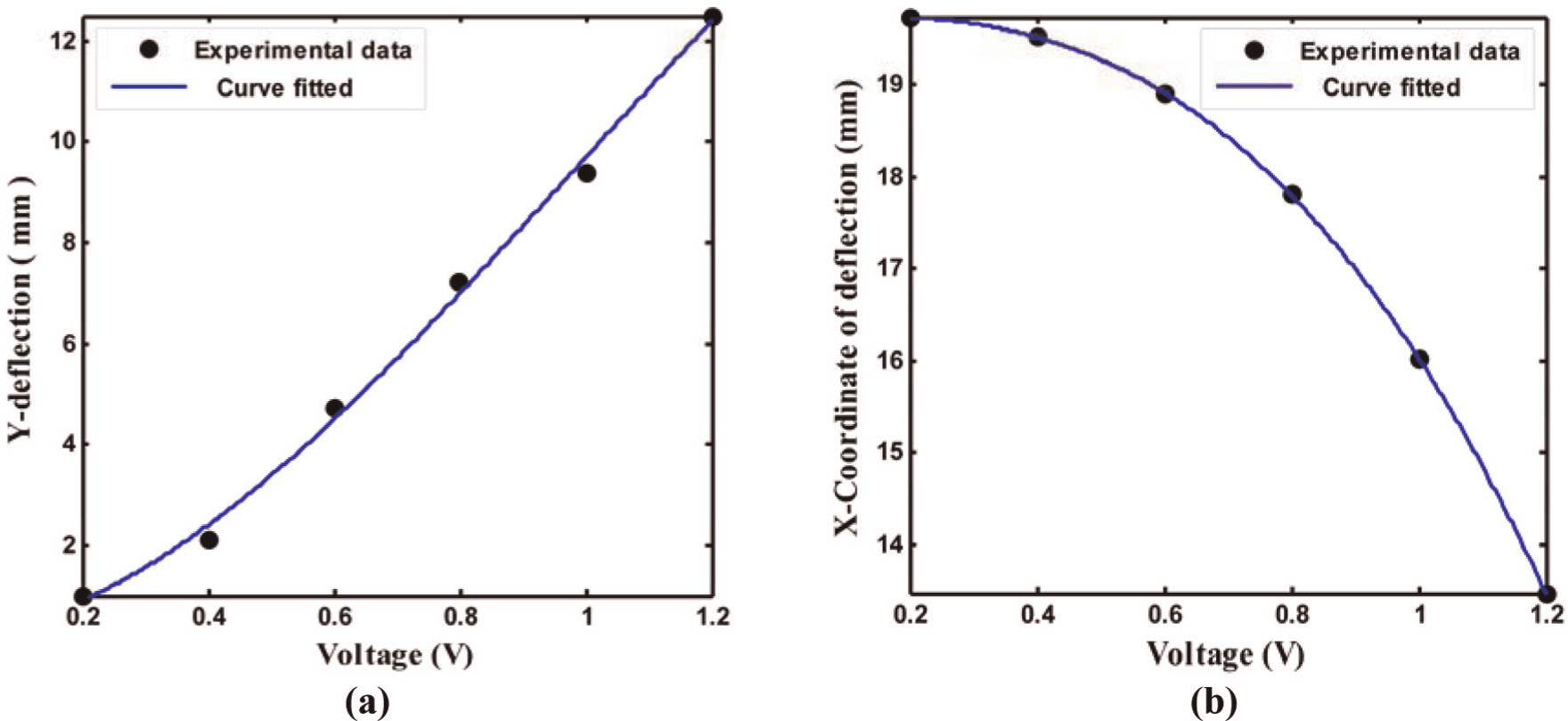
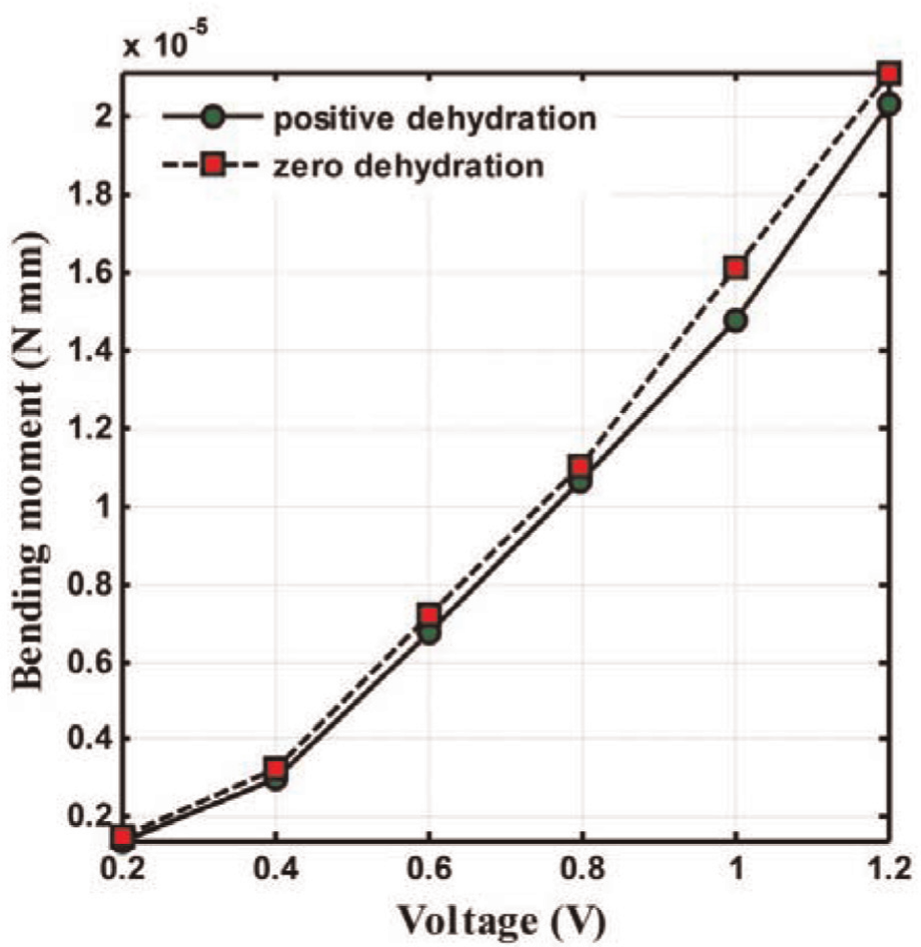
Taking the material properties of the actuator as given in Table 4 and using equation (9), the bending moment obtained for various input voltage is shown in Figure 5. It is observed that the bending moment gradually decreases due to dehydration in working environment. The bending moment developed depends on the moisture contents and subsequently the movement of ions within IPMC and the backbone materials. Figure 6 shows the effect of dehydration on the bending pattern of IPMC for various input voltages.
Bending moment generated for various input voltages.
Bending deflection of IPMC for various input voltages.
Dimension and material properties of IPMC strip obtained experimentally.

IPMC: ionic polymer–metal composite.
Modeling of the IPMC actuator
Figure 7 shows the schematic bending configuration of the IPMC actuator in cantilever mode subjected to an electric potential at the fixed end across its thickness. The actuator is modeled as a continuous distributed parameter system where the bending deflection is assumed to be consisting of two components, namely, displacement due to rigid-body motion (
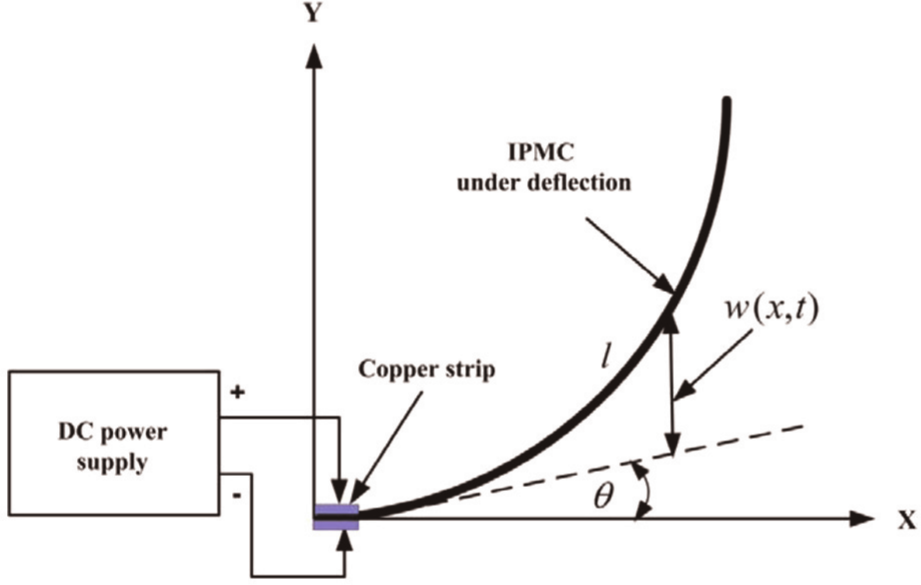
Schematic configuration of an IPMC actuator for an input voltage V.
Kinetic energy of the system
Velocity
where
Here,
Here,
where
For the first three modes,
or
where
Figure 8 shows the first three mode shapes of vibration of the actuator.
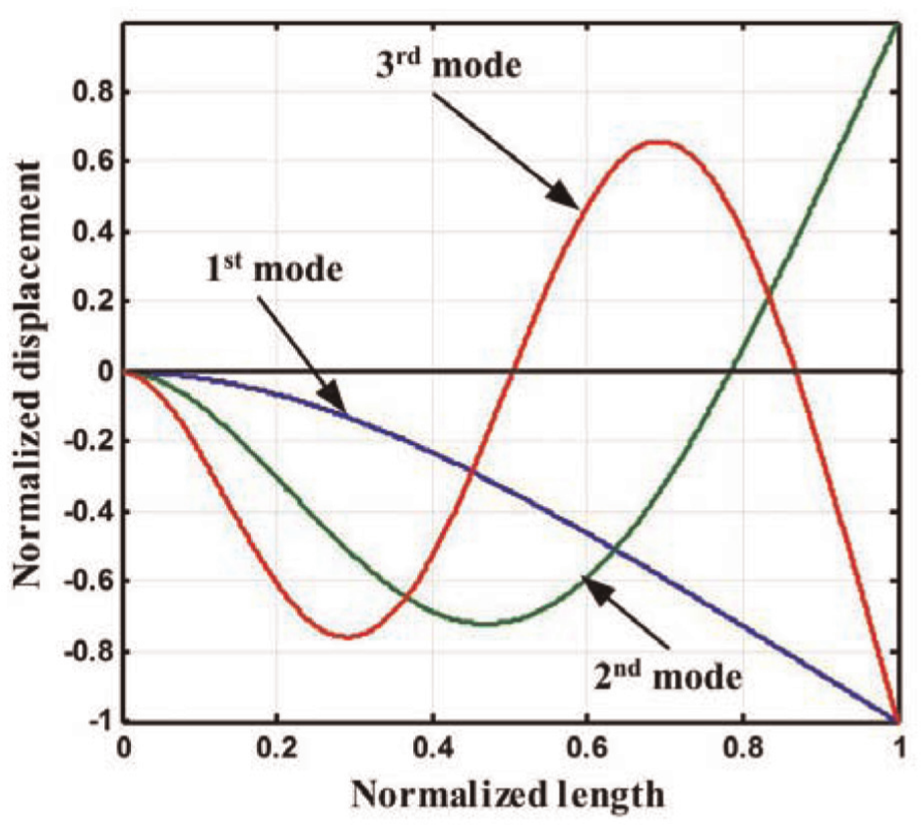
First three mode shapes of vibration of the IPMC actuator.
Potential energy of the system
The potential energy of the system is due to only deformation of the actuator as the motion is restricted in the horizontal plane. Therefore, neglecting gravitational effect, the potential energy of the system can be expressed as
Substituting equation (16) into equation (21), one may write
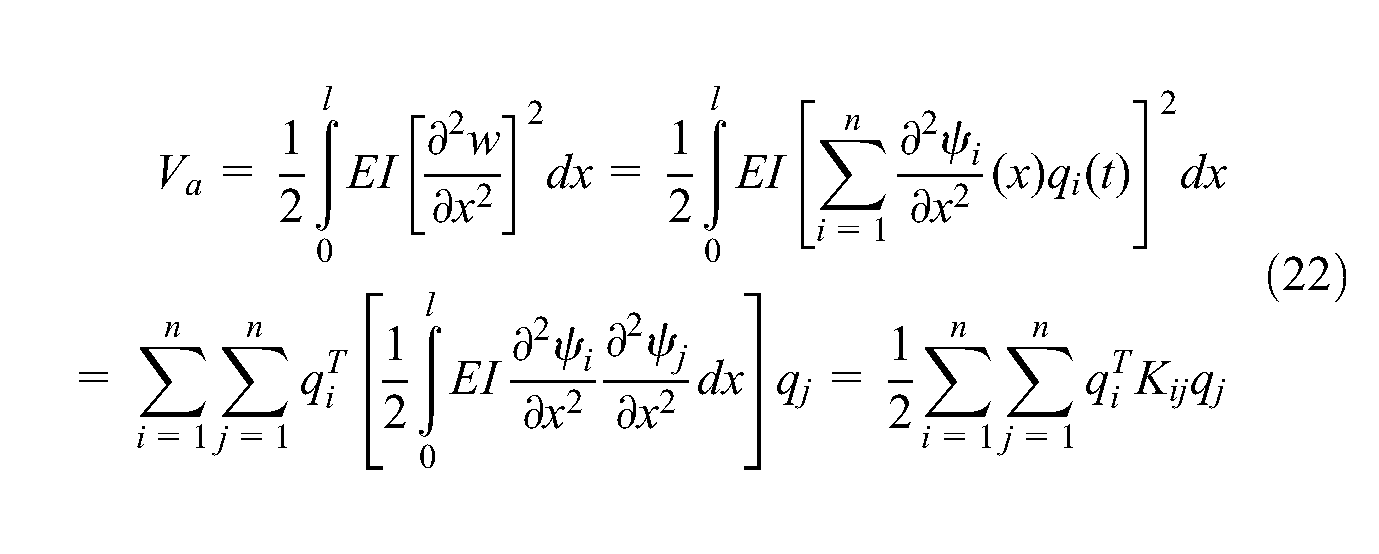
where
Work done due to damping and input voltage
Work done due to structural damping of the actuator can be expressed as
Here,
where
Furthermore, work done by IPMC actuator is due to the bending moment generated by the applied electric potential. Assuming an equivalent force

where
Equation of motion of the system
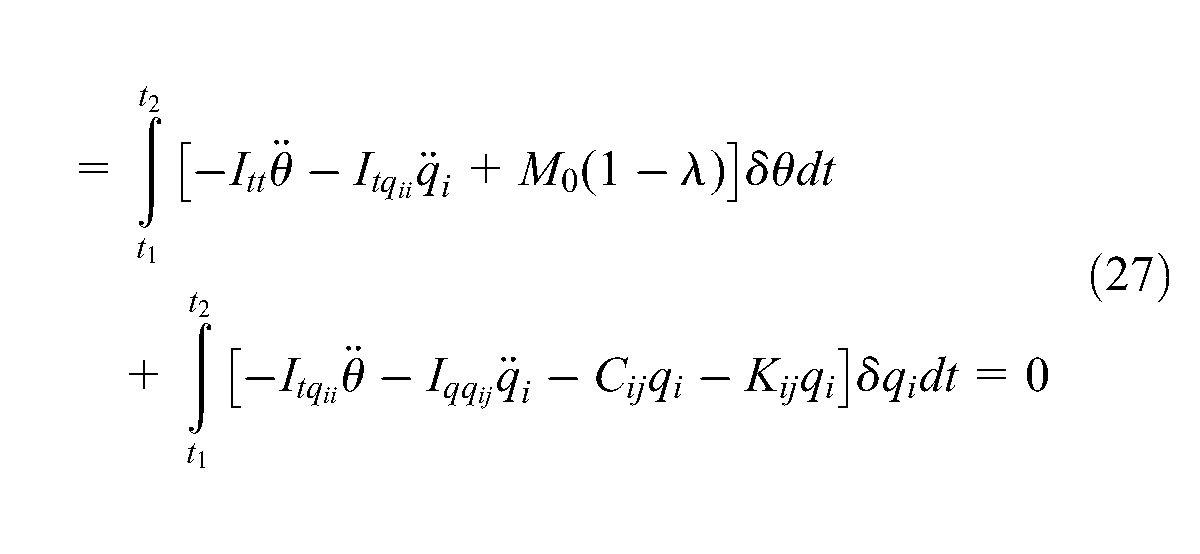
Clubbing together the expression for total kinetic and potential energies, work done and then applying the extended Hamilton’s principle
The equation of motion is obtained as follows
Substituting the value of
As
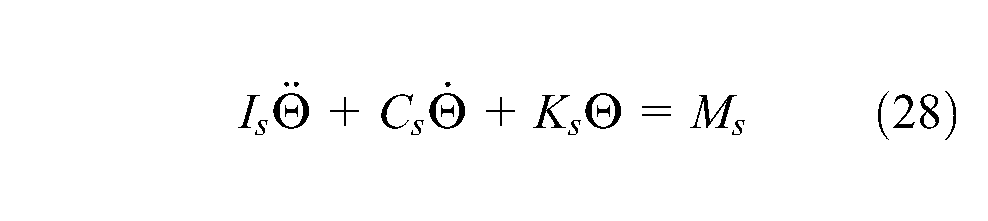
where
Equation (28) is solved using RK4 method to obtain
Results and discussion
Numerical results
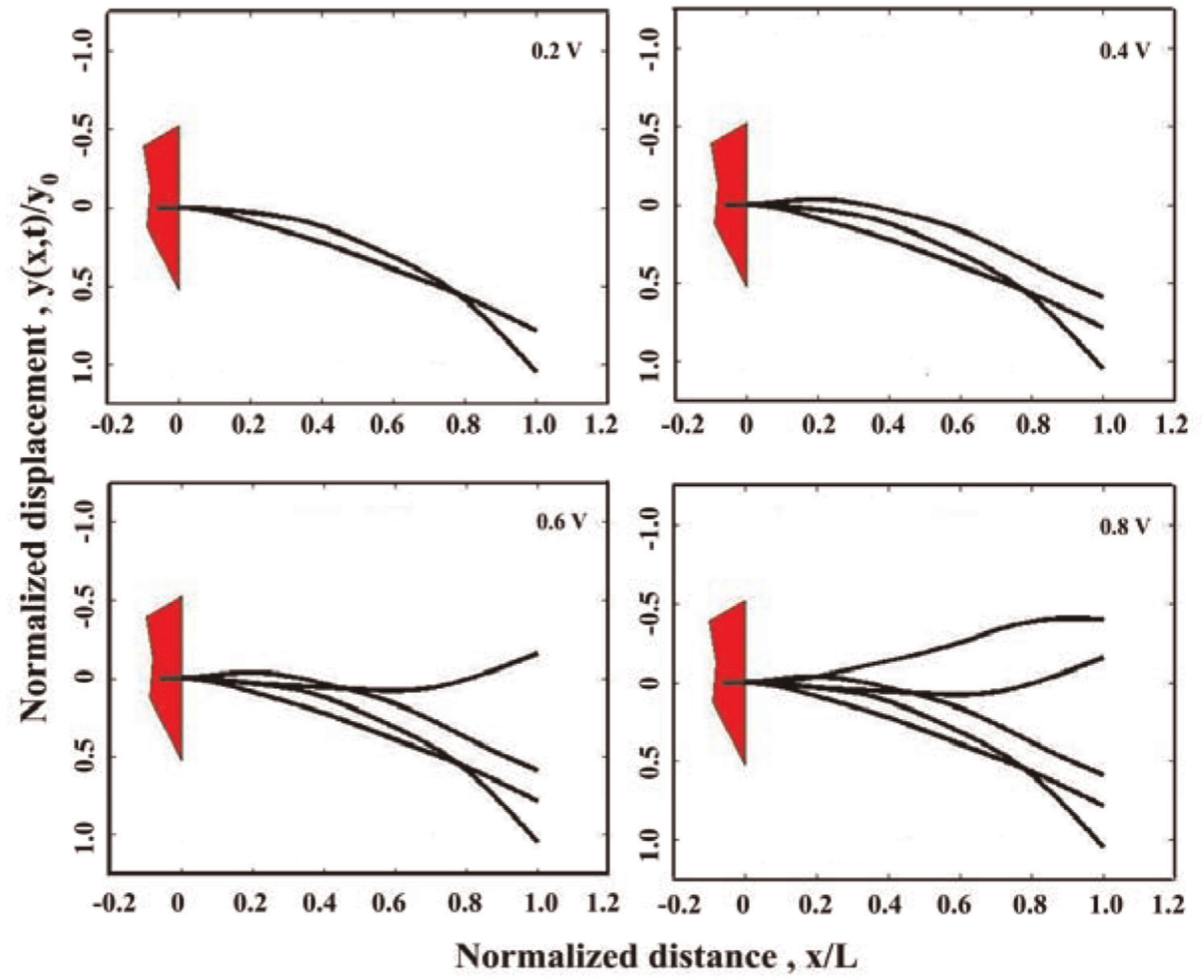
Numerical simulation are performed for a single-patch IPMC actuator taking into account of the experimental data as given in Table 1 and the physical properties of the IPMC as given in Table 4. Unlike in most of the analyses where single-mode study is done, in this study, first three modes have been taken into consideration for analysis. The governing equation of motion of the system (equation (28)) is solved subsequently to obtain the vibration response for various input voltage. For simulation, the
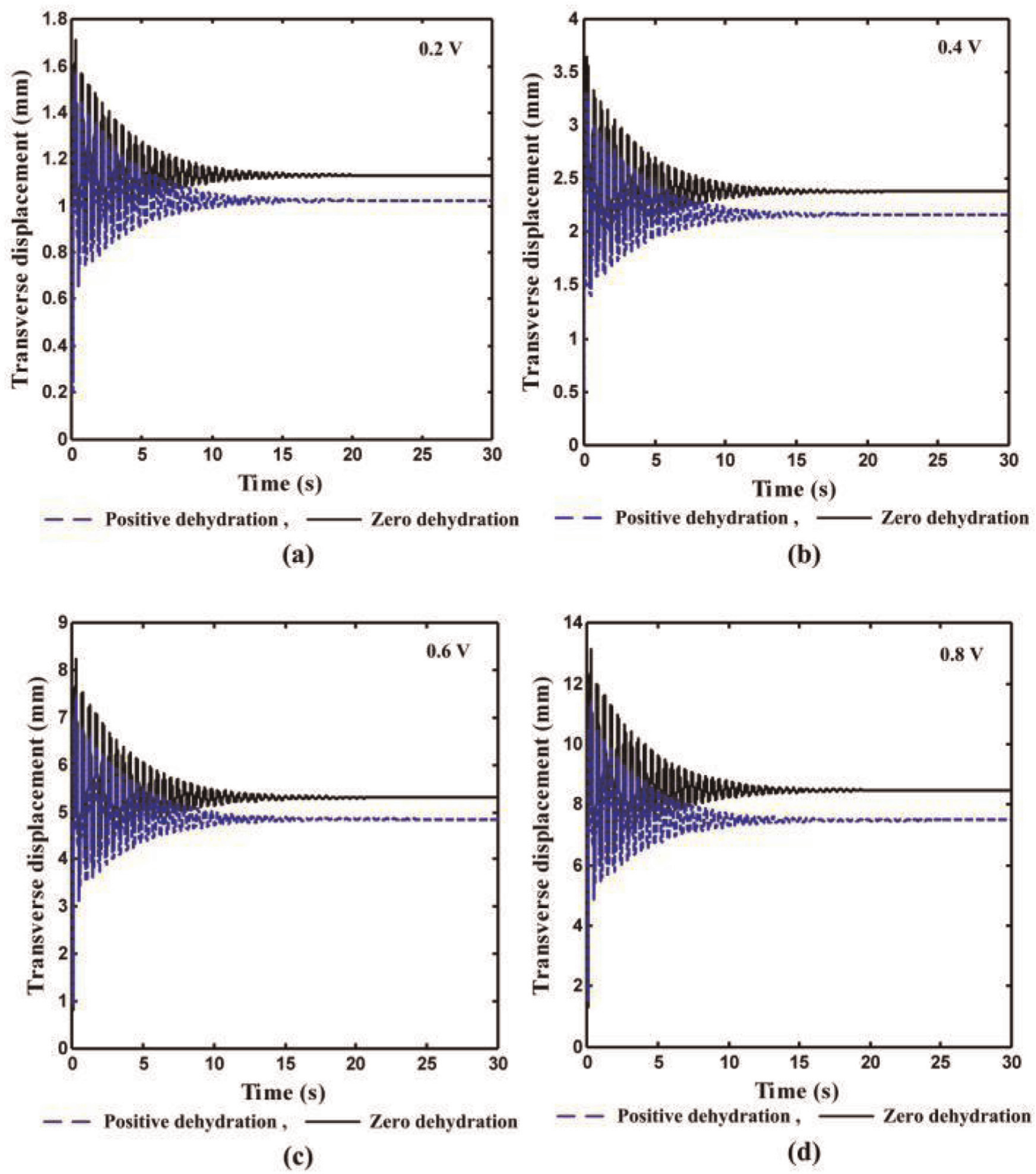
Vibration response of the IPMC actuator with various input voltages: (a) 0.2, (b) 0.4, (c) 0.6, and (d) 0.8 V.
Figure 10(a) and (b) shows the comparative study on tip deflection obtained through experimentally and numerically solving equation (28). It is observed that the percentage error between experimental and simulated results for “positive” and “zero” dehydration conditions at 0.2 V is around 2.4% and 2.9%, respectively, while at 0.8 V, it is around 4.0% and 6.0%. Therefore, it is clearly observed with the increment of input voltage, the percentage error of tip deflection increases. These results clearly validate the dehydration model (equation (6)), that is, with the increase of input voltage, the dehydration factor increases. Figure 11 shows the percentage change in tip deflection during steady state for input voltage of 0.2 and 0.8 V. It is observed that during steady state, the percentage reduction of amplitude is around 9.5% and 11.6% for an input voltage of 0.2 and 0.8 V, respectively. The results also clearly validate the dehydration model (equation (6)), that is, the loss-factor increases with the input voltage. Hence, the developed model is suitable for finding the response of the actuator easily without going for expensive experiments.
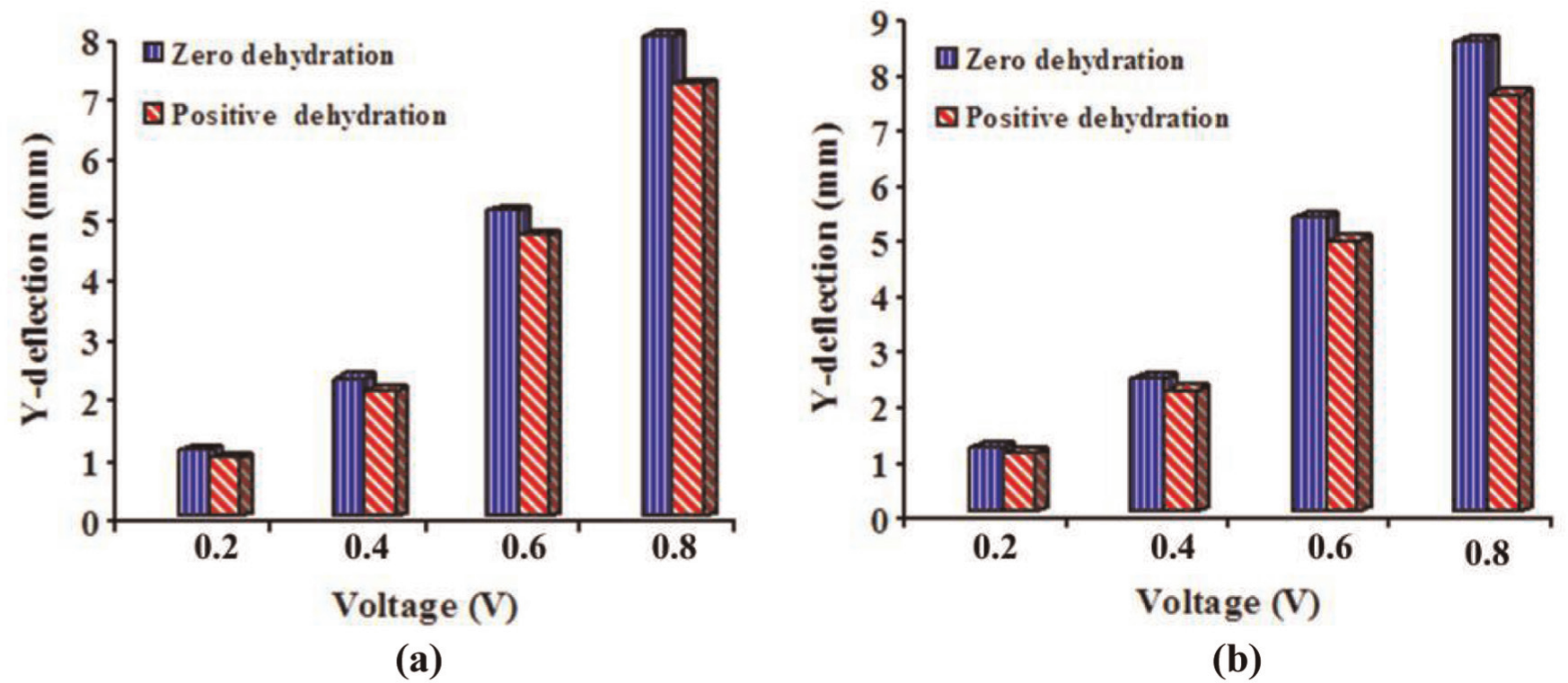
(a) Experimental and (b) estimated results for y-deflection at steady state.
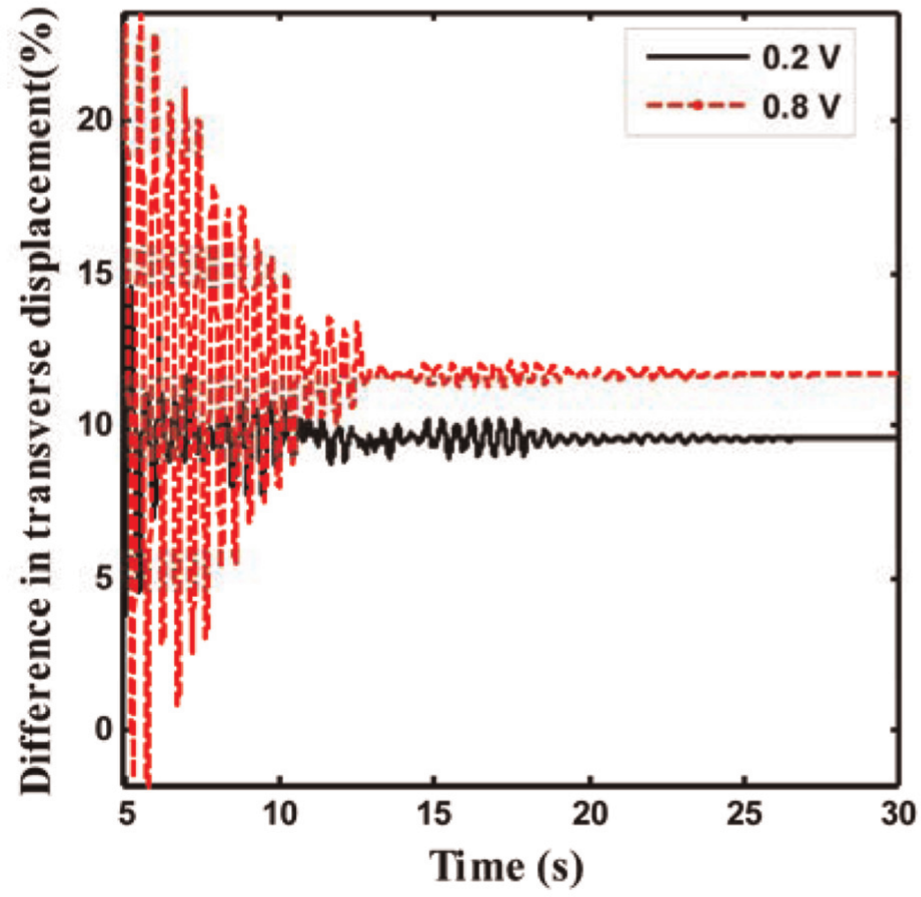
Percentage differences in the transverse displacement of IPMC with an input voltage of 0.2 and 0.8 V for both hydrated and dehydrated conditions.
Figure 12 shows the actual bending of the IPMC actuator with vibration of first three modes. It is also observed that as the voltage increases the reduction increases gradually. Furthermore, it is anticipated that as the IPMC actuator dehydrates continuously in working medium, the transport of mobile cations along with water molecules with them is reduced gradually. Thus, the numerical study of the vibration response of the IPMC actuator clearly demonstrates the effect of dehydration on steady-state response and also on the transient response. In both the cases, it is observed that due to dehydration, steady-state tip position and also the amplitude of vibration (transient) response decrease.
Actual bending of IPMC for various input voltages.
Experimental results
An IPMC actuator of size 20 mm × 5 mm × 0.2 mm is prepared and tested at different time intervals under input voltage of 0.2 V, and the transient vibration characteristics with dehydration are studied. The experimental setup is shown in Figure 13. One end of the control module is connected to the Rotational Laser Vibrometer (RVL-5500; Polytec, GmbH) and other end to the computer where the data are processed using Bruel and Kjaer PULSE Lab Shop, Version 13.1.0.246 software (Bruel and Kjaer sound and vibration measurement A/S, Denmark). The DC power supply (0–32 V DC, 0–2 A; Aplab Ltd., Aplab House, Mumbai, India) is used to apply voltage.
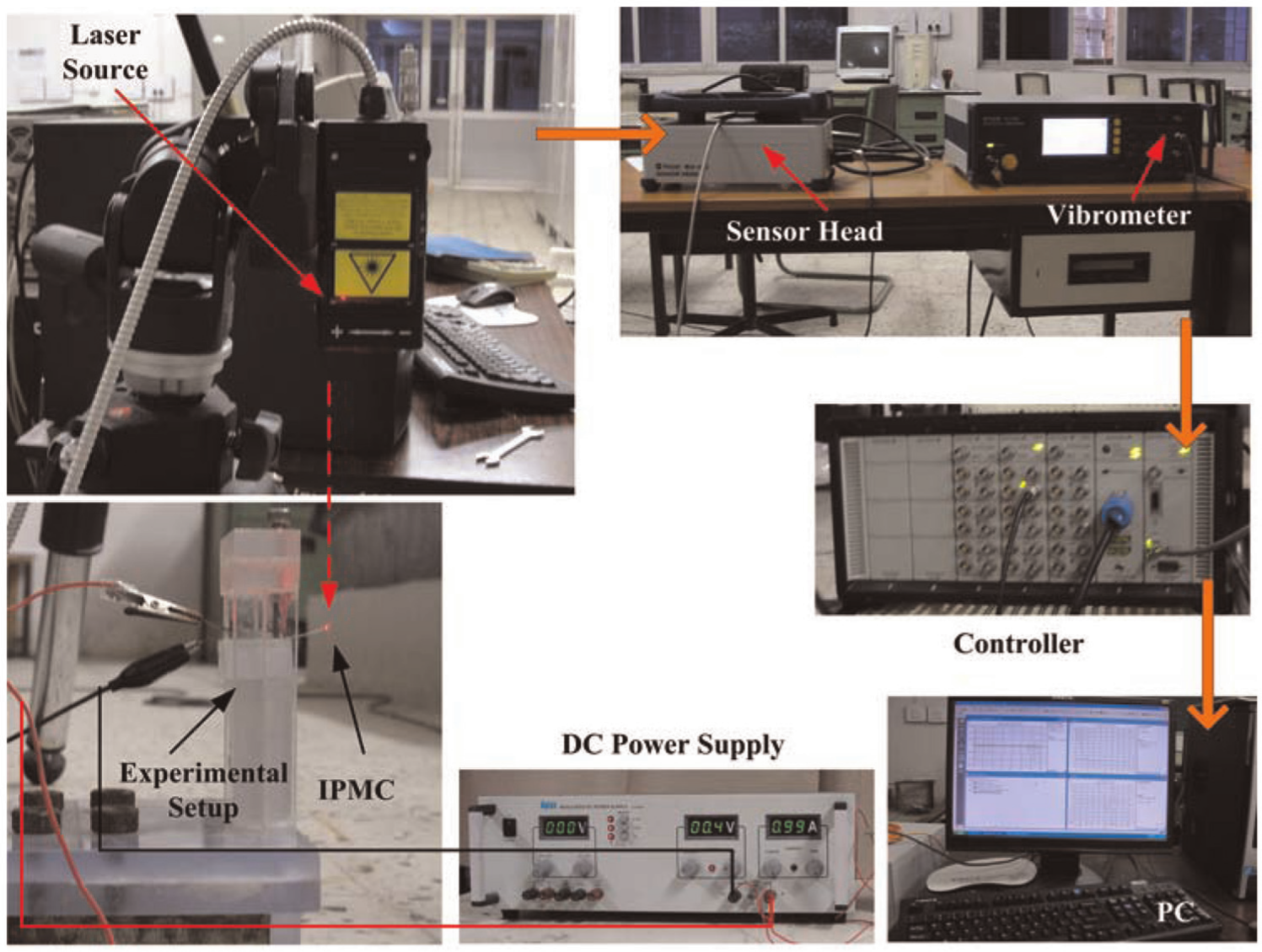
Experimental setup for vibration analysis.
Before the experiment, IPMC sample is boiled in deionized water for 10 min and kept within deionized water at room temperature for 24 h to ensure full hydration. The entrapped surface moistures are removed by keeping the actuator in an open environment for 5 min prior to the experiment. Experiments are conducted by applying voltage at the fixed end of the cantilever actuator for 30 s and the response of the free end is measured by RVL. The sample is kept in an open environment further for 10, 15, 30, and 60 min, successively prior to the next experiment to ensure adequate dehydration. All the experiments are conducted at room temperature. The experimental results are given in Figures 14 to 19.
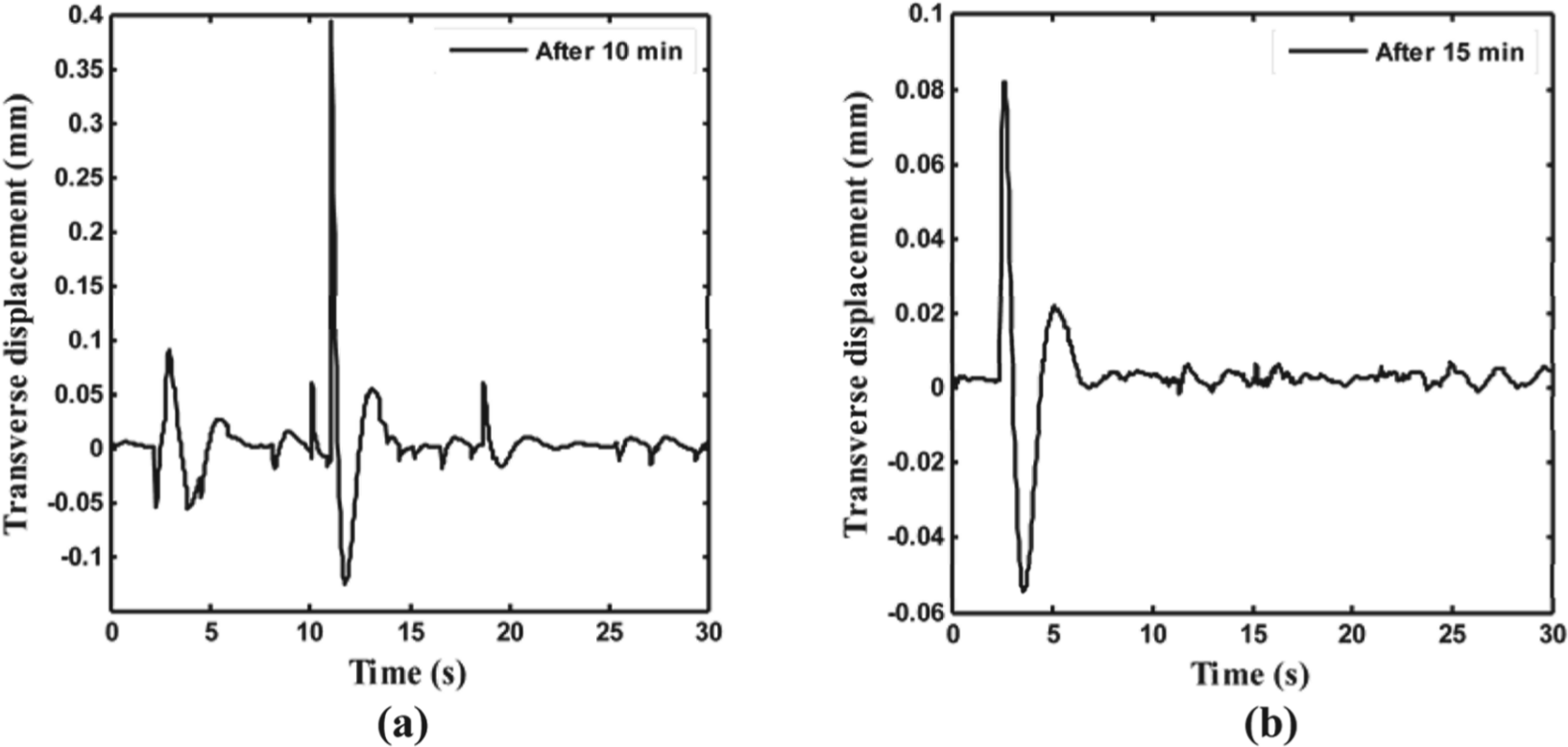
Vibration response after (a) 10 and (b) 15 min for an input voltage of 0.2 V.
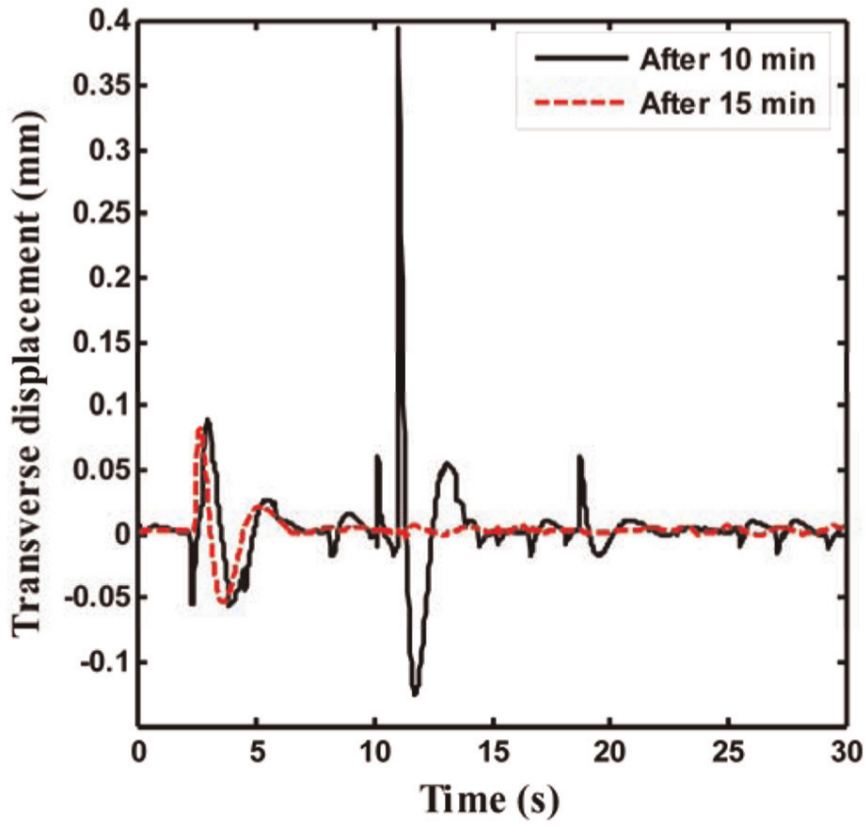
Vibration response after 10 and 15 min for an input voltage of 0.2 V.
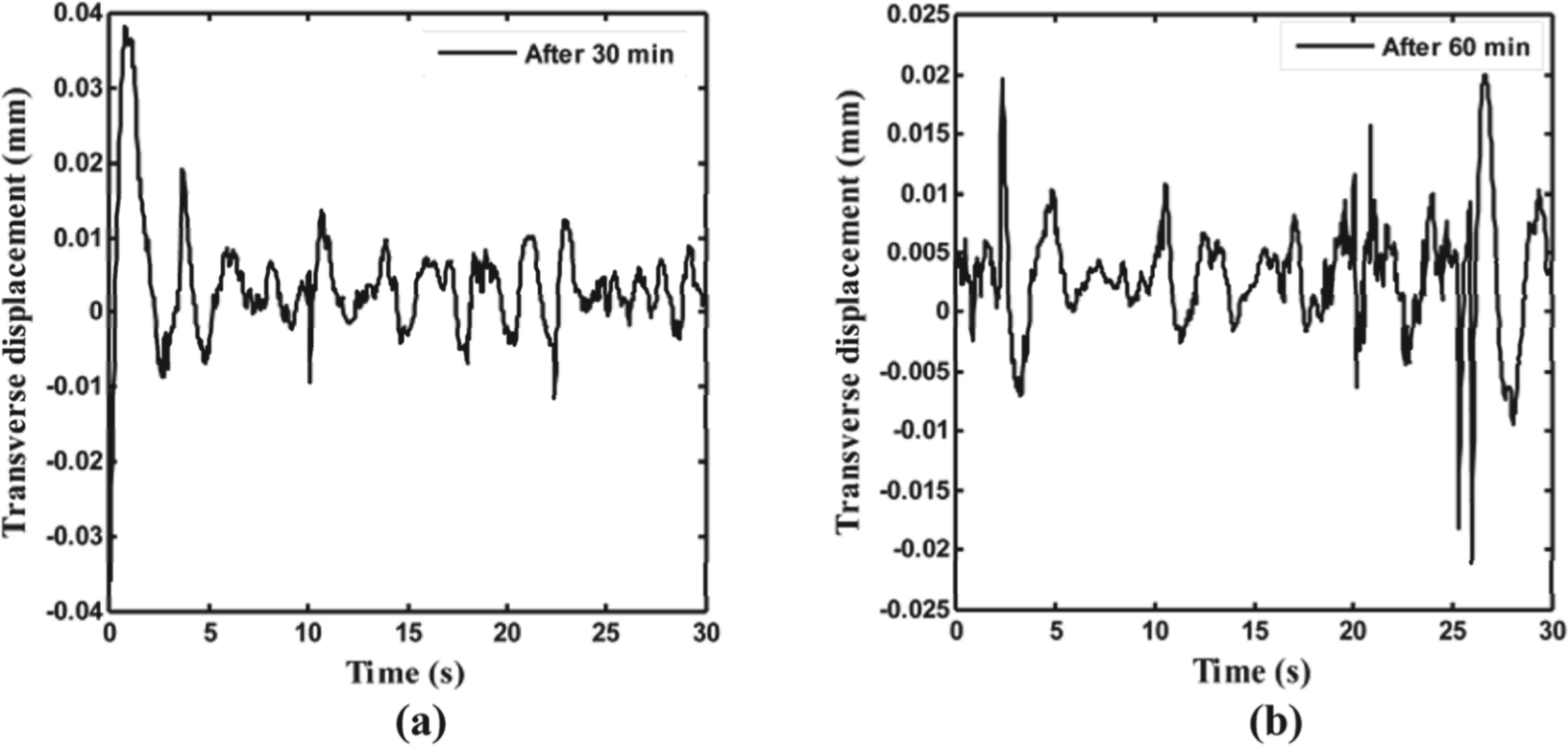
Vibration response after (a) 30 and (b) 60 min for an input voltage of 0.2 V.
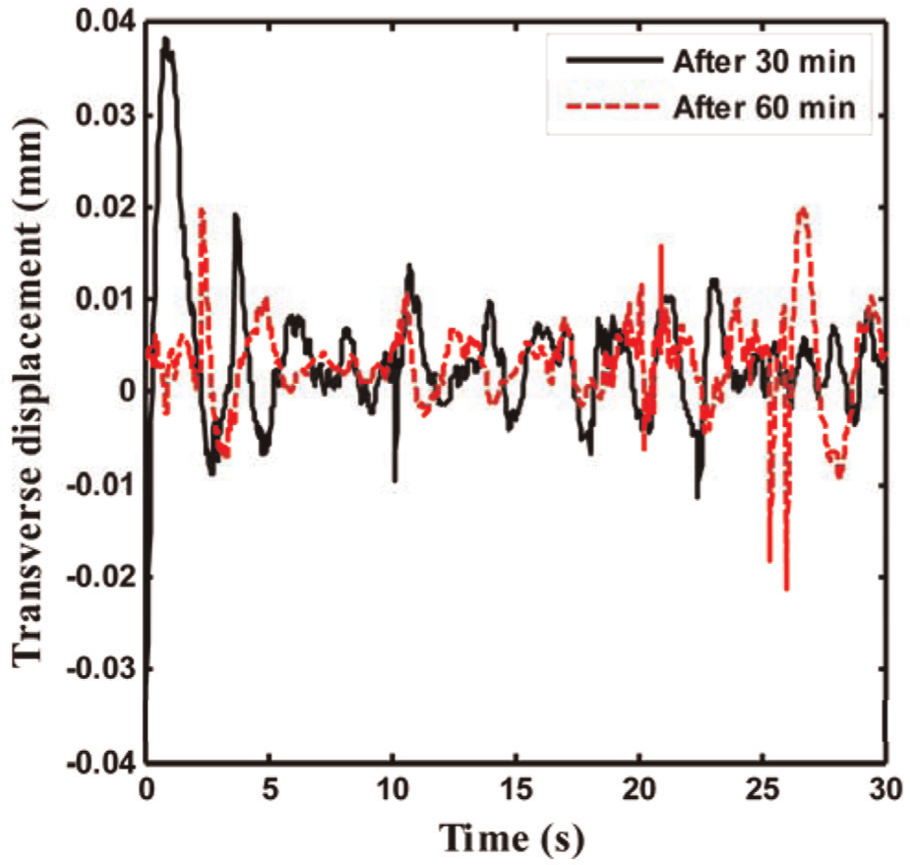
Vibration response after 30 and 60 min for an input voltage of 0.2 V.
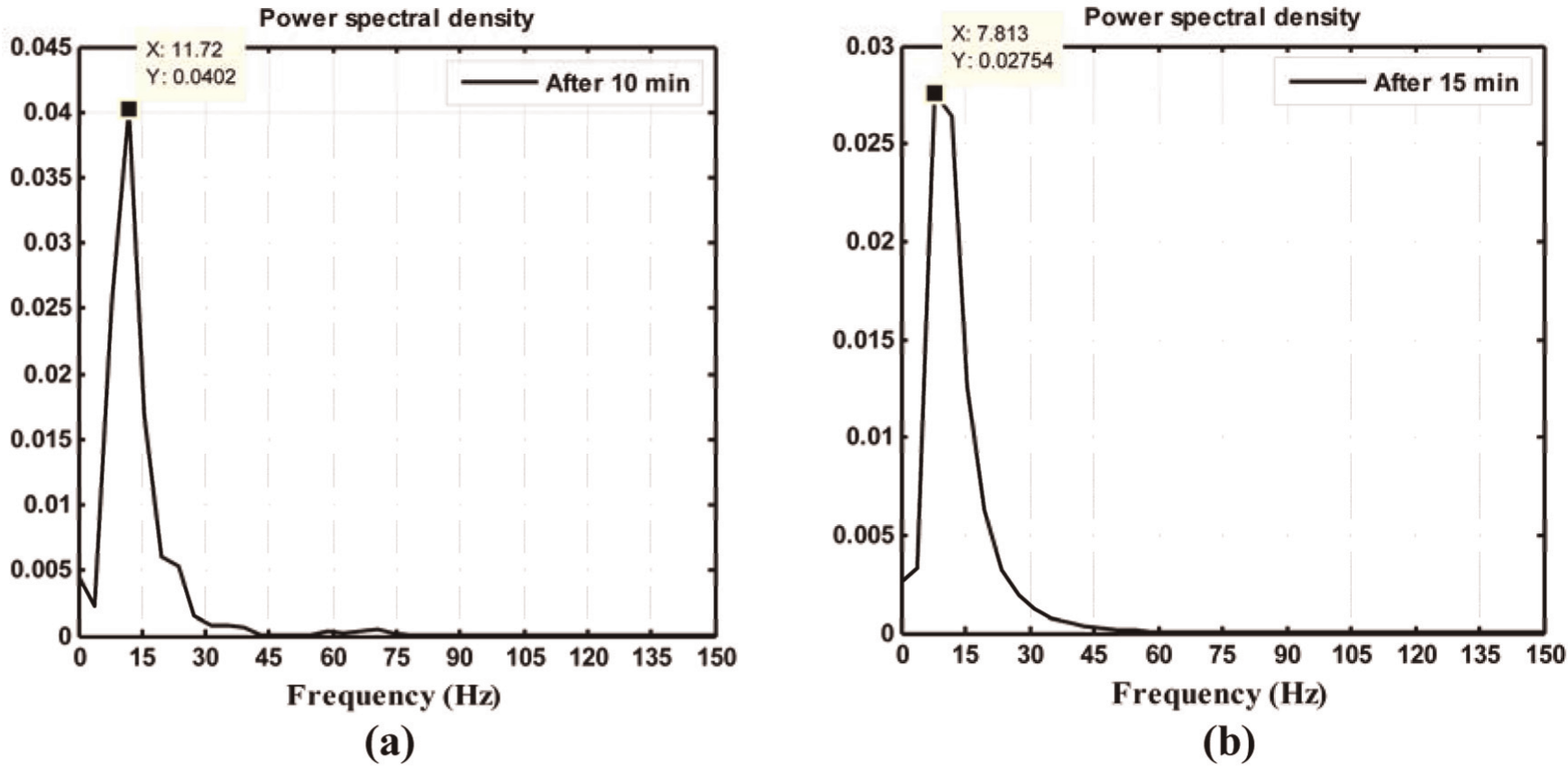
FFT after (a) 10 and (b) 15 min for an input voltage of 0.2 V.
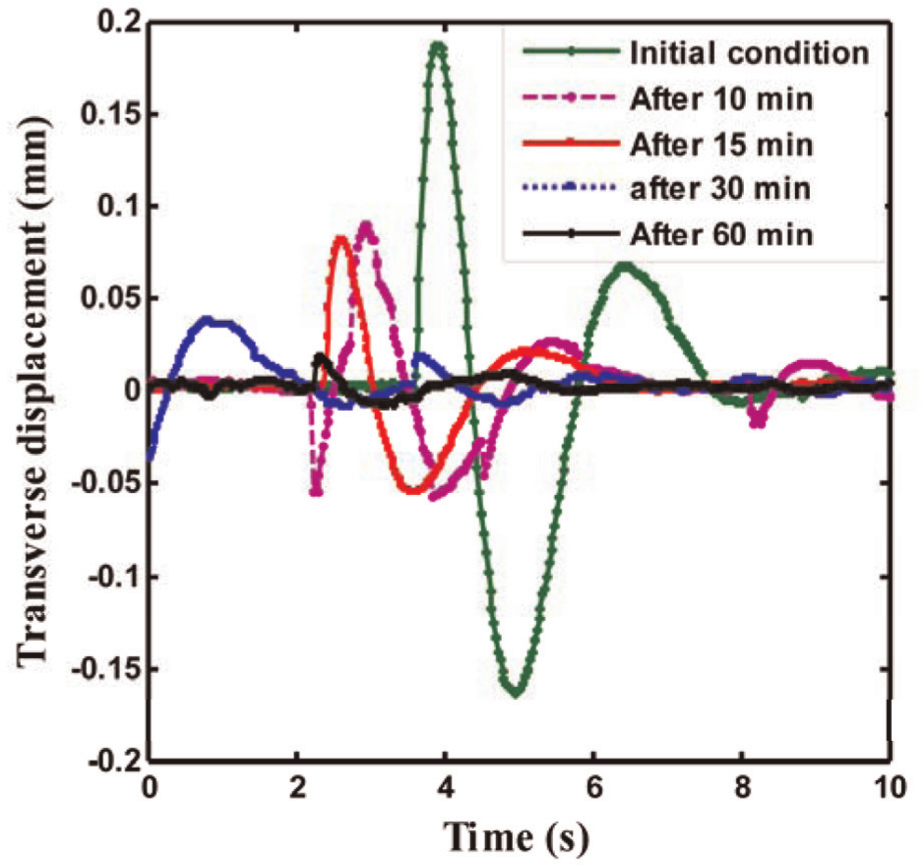
Vibration response at different time intervals compared to the initial condition for an input voltage of 0.2 V.
Figure 14(a) and (b) shows the vibration response of the actuator after 10and 15 min from the initial condition, while the combined response of the actuator up to 30 s is shown in Figure 15. The combined response of the actuator shows significant reduction of vibration amplitude due to dehydration validates the proposed dehydration model. Figure 16(a) and (b) shows the vibration response of the actuator after 30 and 60 min from the starting of the experiment. It is also observed that due to dehydration transverse displacement of the actuator is reduced considerably. Furthermore, it is observed that the reduction of maximum amplitude occurs around 50%. The combined results up to 30 s are shown in Figure 17. The results clearly show the additional reduction of the transverse displacement compared to the results shown in Figure 15. These results validate the fact that with time and input voltage, the dehydration increases, that is, more losses of water content and, hence, further reduction of vibration amplitude. Figure 18(a) and (b) shows the corresponding fast Fourier transform (FFT) of the vibration response as shown in Figure 14(a) and (b), respectively. It is observed that the bandwidth of the vibration remains within the range of 2–30 Hz. Thus, the results indicate low-frequency excitation of the IPMC actuator.
From the experimental results (Figures 14 to 18), it is observed that the system reaches steady state after approximately 15–20 s. It is due to the fact that as the time interval increases, the loss of moisture content increases and, after certain period of time, it reaches a saturation limit (IPMC actuator gets dried). This observation also validates the dehydration factor model, presented in the ‘Calculation of loss-factor’ section (Table 2 and Figure 3). Figure 19 illustrates all the response results for time interval of 10 s and compared with the initial (fully hydrated) condition.
Figure 20 shows the vibration response and the effect of dehydration for four more instances for an input voltage of 0.4 V. It is observed that the amplitude of vibration response increases with the increase in input voltage. Furthermore, it is also observed that with “positive dehydration,” the amplitude of vibration decreases significantly compared to hydrated condition.

Comparison between vibration response after (a) 5 and 10 min and (b) 45 and 60 min for step input voltage of 0.4 V.
Thus, it can be concluded that for a particular input voltage, the amplitude of vibration (transverse displacement) of the IPMC actuator gradually decreases due to dehydration effect. This also indicates that with time and input voltage, dehydration increases and reduces the effectiveness of the actuator. Thus, the experimental results demonstrate that as the IPMC actuator gets dehydrated, both the transient response (transverse displacement) and the steady-state response (Figure 10(a)) decrease compared to the fully hydrated condition.
Conclusion
In this article, loss of moisture content of the IPMC actuator is modeled by introducing a new term “loss-factor” in terms of input voltage and time. The proposed model is valid for any IPMC actuator in working medium that experiences continuous dehydration. Both theoretical and experimental investigations confirm that both bending tip deflection and amplitude of vibration response decreases with dehydration. The steady-state response is found to be in good agreement with the experimental results. The proposed dehydration model and experimental results useful for controlling the end-tip position accurately by compensating the loss due to dehydration.
Footnotes
Funding
This study received partial support from Department of Science and Technology, Government of India under SERC FAST Track Scheme (SR/FTP/ETA – 076/2009).