
Abstract
Leveraging smooth nonlinearities in vibration energy harvesters has been shown to improve the potential for kinetic energy capture from the environment as a transduced, alternating flow of electrical current. While researchers have closely examined the direct current power delivery performance of linear energy harvesters, there is a clear need to quantify the direct current power provided by nonlinear harvester platforms, in particular those platforms having bistable nonlinearities that are shown to have advantages over other smooth nonlinearities. In addition, because real world excitations are neither purely harmonic nor purely stochastic, the influences of an arbitrary combination of such excitation mechanisms on power delivery must be uncovered. To bring needed light to these roles and opportunities for nonlinear energy harvesters to provide direct current electrical power for numerous applications, this research formulates a new analytical approach to characterize simultaneous harmonic and stochastic mechanical and electrical responses of nonlinear harvester platforms subjected to realistic base excitation. Based on the outcomes of analytical, numerical, and experimental studies, it is found that additive stochastic excitation may result in direct current power enhancement via perturbation from a low amplitude state particularly at low frequencies or reduce the direct current power by preventing persistent snap-through response often at higher frequencies. When the noise standard deviation is greater than the harmonic amplitude by approximately two times, the advantages to direct current power generation are more often realized.
Introduction
Traditionally, the maintenance of engineered infrastructures is undertaken according to a scheduled basis, which is ineffective in the long-term due to accumulated expense and the serious potential for unintended failures (Randall, 2011). Condition-based structural health monitoring has risen as a promising alternative whereby the health of the infrastructures is assessed in real-time through a network of sensor nodes (Randall, 2011). Such sensors individually demand from around 100 µW to about 100 mW of direct current (DC) power supply, based on the function involved (Anon, 2015; Baert et al., 2006; Roundy et al., 2003). Because many of the sensors are placed so as to monitor the structural vibration levels as dynamic health indicators, kinetic energy is available to the sensor nodes. Thus, harvesting the kinetic energy using electromechanical oscillators collocated with the sensors has emerged as a way to realize self-sufficient structural health monitoring systems (Erturk and Inman, 2011b; Priya and Inman, 2009). In order to effectively harvest the kinetic energy from the structural oscillation, the vibration energy harvester must be sensitive to the ambient energy forms, because conventional electromechanical transduction mechanisms produce current flow in proportion to displacement or velocity of the mechanical response (Erturk and Inman, 2011b; Priya and Inman, 2009). Numerous researchers have found that the smooth nonlinearities of monostable and bistable Duffing oscillators may lead to broader spectral sensitivities to ambient vibrations than linear resonators, which has motivated considerable research attention to scrutinize the opportunities (Leadenham and Erturk, 2015; Mann and Sims, 2009; Masana and Daqaq, 2011a, 2011b; Tang et al., 2010).
The non-resonant nature of snap-through dynamics of bistable energy harvesters is a particularly advantageous feature for transduction, since the unique, large amplitude motions may be tuned and triggered with relatively low level input vibrations across a broad range of frequencies (Cottone et al., 2009; Daqaq, 2011; Erturk et al., 2009; Harne and Wang, 2014b, 2017; Stanton et al., 2010; Virgin, 2000). Despite the strong nonlinearity involved which challenges many theoretical tools, several research teams have studied base excited bistable energy harvesters coupled with resistive electrical circuits through rigorous analytical methods to assess alternating current (AC) power delivery opportunities. For instance, Stanton et al. (2012), Panyam et al. (2014), Daqaq (2011), and Harne and Wang (2014b) have leveraged various theoretical approaches to explicitly predict the AC power generation from bistable vibration energy harvesters when subject to either harmonic or stochastic base excitations. Despite the value of such insights, in order to supply useful power for structural monitoring sensor nodes, DC power must be delivered from the harvester. Thus, a rectifier circuit is needed to interface between the oscillatory electromechanical response and the electrical load. Rectifier circuits are dynamic systems, are nonlinear, and coupled to the dynamic response of the harvester itself, thus demanding special attention in model approaches (Liang and Liao, 2012; Shu and Lien, 2006a). Researchers have found that active synchronized switch harvesting on inductor circuits (Guyomar et al., 2005; Liang and Liao, 2012; Shu et al., 2007) and synchronized electric charge extraction circuits (Badel and Lefeuvre, 2016; Lefeuvre et al., 2005; Wu et al., 2012) enable promising DC power delivery for linear vibration energy harvesters under harmonic excitations. Comparatively, the simple and passive standard diode bridge rectifier provides an effective DC power delivery from linear and nonlinear vibration energy harvesters (Elvin, 2014; Pasharavesh et al., 2017; Shu and Lien, 2006b; Sodano et al., 2005) without unfavorable loss of power resulting from active synchronization. For instance, Shu and Lien (2006b) have shown that the electromechanical coupling coefficient is strongly influential on the mechanical-to-electrical energy conversion efficiency of linear energy harvesters interfaced with diode bridge rectifiers, which emphasizes the importance of comprehensively investigating the roles of practical rectifying circuits in contrast to AC resistive circuit counterparts. Yet, despite the significance of this knowledge, the insights are relevant only for linear vibration energy harvesters, while the analytical methodologies are not directly extensible to the numerous cases in which energy harvesters possess nonlinearities for performance enhancement.
Yet, considering the broad range of knowledge revealed by the studies surveyed above, such insights pertain only to the responses of energy harvesters when subjected to pure harmonic or pure stochastic excitations. In fact, numerous environments in which energy harvesters will be deployed alongside structural monitoring sensors do not exhibit such simple purely harmonic or stochastic excitation spectra. Instead, real world excitations contain a combination of noise and periodic contributions, which is inevitable based on the fact that the monitored structures oscillate in primary modes but are themselves acted upon by random excitations such as tire–road interaction or footfalls (Green et al., 2013; Turner and Pretlove, 1988; Zuo and Zhang, 2013). There is a clear lack of investigations on energy harvester electrodynamic responses that result from excitation conditions more closely representative of realistic vibrations. Although the dynamic sensitivities of weakly nonlinear oscillators have been examined under such conditions (Anh and Hieu, 2012; Bulsara et al., 1982; Nayfeh and Serhan, 1990), and a recent analysis has been presented to explore the purely mechanical responses of post-buckled structures to combined harmonic and stochastic perturbations (Harne and Dai, 2017), no such analysis exists to characterize the electromechanical responses and DC power delivery of nonlinear vibration energy harvesters subjected to arbitrary combinations of harmonic and stochastic base accelerations.
Motivated to close this fundamental knowledge gap, this research undertakes comprehensive efforts to characterize the DC power delivery from nonlinear vibration energy harvesters subjected to a combination of harmonic and stochastic excitation. Due to the strategic advantages of bistable nonlinearities, attention is directed to bistable energy harvesters, although the model and analytical methods presented pertain to the broader class of smooth, stiffness-based nonlinearities. The comprehensive efforts undertaken here notably include a new analytical procedure that facilitates direct prediction of the structural dynamics and electrical responses (including DC power), in parallel with a track of numerical simulation for verification and experiments for validation of the theoretical approach. The following sections first introduce the nonlinear bistable vibration energy harvester platform examined and describe the corresponding analytical framework established to investigate the platform. Then, a complement of analytical, numerical, and experimental results are presented to uncover the influences of the combined excitation form and electrical circuit parameters on the DC power delivery. A summary of primary conclusions and directions for future research are provided in the final section.
Nonlinear vibration energy harvester modeling
Energy harvester platform
This section introduces the experimental platform around which the model formulation is established, while further modeling details and analytical procedures are given in section “Governing equations,”“Approximate analytical solution to governing equations,”“Harmonic electromechanical dynamics,”“Stochastic electromechanical dynamics,” and “Combined harmonic and stochastic response of the nonlinear energy harvester.” In this study, the energy harvester under consideration employs a pair of attractive magnets that act on a cantilevered piezoelectric energy harvester. The positioning of the magnets with respect to the ferromagnetic cantilever tip tailors the type and strength of the nonlinearity (Erturk and Inman, 2011a; Feeny and Yuan, 2001; Hikihara and Kawagoshi, 1996; Moon and Holmes, 1979). Figure 1 provides a photograph and schematic of the experimental system examined in the research. A piezoelectric beam (PPA-2014; Midé Technology) is used as the energy harvester structure. The device is composed of layers of PZT-5H, copper, and glass-reinforced epoxy FR4; this composition results in appreciable inherent mechanical damping due to both the laminated design and the FR4 in particular. This beam is clamped at one end of a rigid aluminum mount. Attached to the free end of the cantilever are steel extensions, with total mass m = 9 g, that reduce the lowest order natural frequency of the beam and provide for a ferromagnetic material for the magnets to act upon. The total length of the cantilever and extension is L = 61 mm. A pair of neodymium magnets is positioned near the ferromagnetic extension, which cause attractive forces that work in opposite directions to linear elastic forces induced in the beam by displacement of the beam tip (Moon and Holmes, 1979). By reducing the distance between the beam tip and magnets,
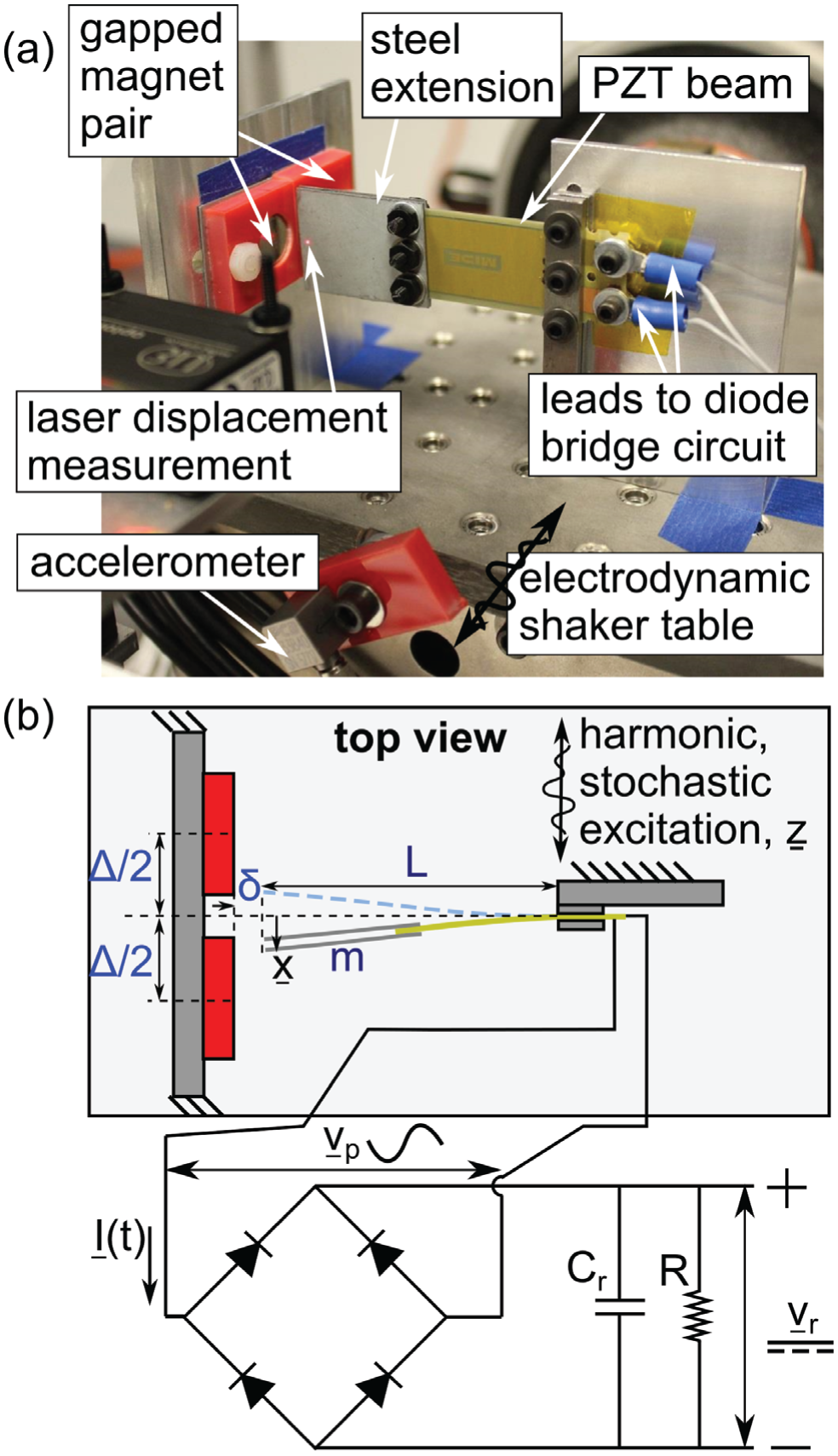
(a) Photograph and (b) schematic of experimental setup.
Governing equations
Considering that the nonlinear energy harvester exhibits a weak mono- or bistable nonlinearity, has a lowest order mode at a frequency much less than higher order modes, and is excited at frequencies near to this lowest order mode, the governing equations for this system are shown to be (Harne and Wang, 2014a; Moon and Holmes, 1979; Panyam et al., 2014)


The assumptions described above are all borne out in the ensuing experimentation. In equation (1),
The diode bridge AC–DC converter is connected to the energy harvester as shown in Figure 1(b). Here, perfect rectification is assumed.
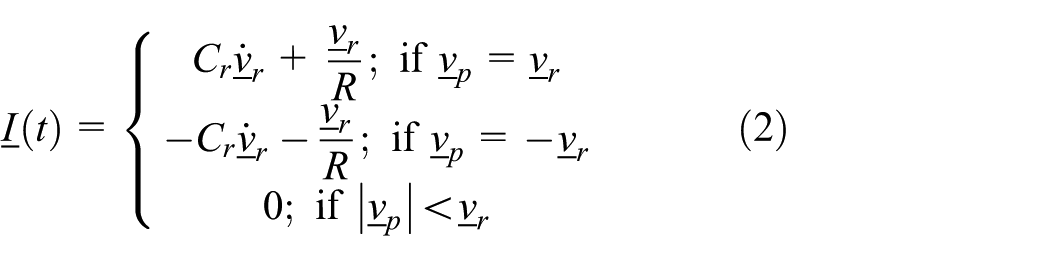
To maintain a steady rectified voltage
Non-dimensionalization of the governing equations assists in the acquisition of explicit analytical solutions via computationally efficient algorithms. Here, a new non-dimensionalization approach is introduced due to the presence of nonlinearities in the energy harvesting structure and in the rectifying circuit. After non-dimensionalization, the governing equations become



The corresponding non-dimensional parameters are defined as follows
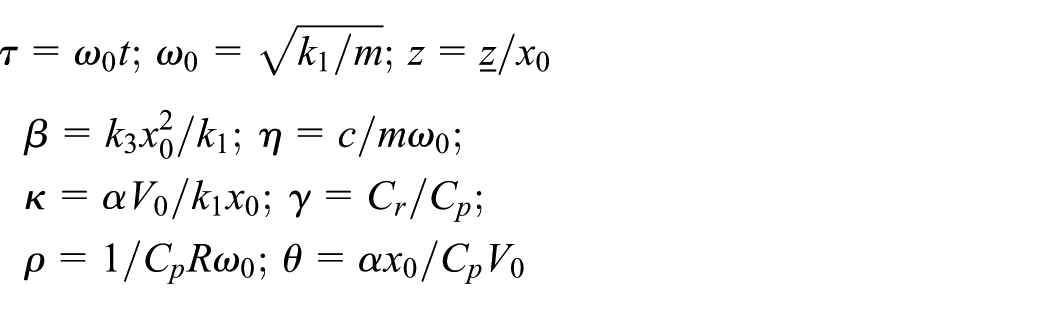
where
In order to analytically investigate realistic combinations of excitations on the nonlinear energy harvester for the first time, the base acceleration excitation includes harmonic and stochastic components

such that

and where
Approximate analytical solution to governing equations
By leveraging both harmonic and stochastic linearization, a strategy to predict mechanical responses of post-buckled structures was recently introduced (Harne and Dai, 2017). Yet, in the current context of vibration energy harvesting, the prior analysis is insufficient since it does not account for electrodynamic responses and has no means of characterizing DC power delivery. This research thus builds significantly beyond the prior work (Harne and Dai, 2017) for a comprehensive and first analysis suitable for nonlinear energy harvesters subjected to arbitrary harmonic and stochastic excitations.
To begin, a linearized governing equation system is created to approximate the influences of the nonlinearities in equation (3). Since the nonlinearity is present only in equation (3a), the equivalent linear system is governed by



The parameter

The mean-square error occurs when



Note that the components associated with the white noise have zero-mean,


The coefficients k, h, and g vary slowly in time, while


Substitution of the assumed solution equation (8a) into equation (11) enables the determination of

Because equation (6) is linear, the combined response of the linearized system is the superposition of responses individually associated with the harmonic or stochastic excitation components. Thus, the simultaneous solution to equations (14) and (15) enables the determination of the unknowns within the assumed solution forms of equation (8)






Harmonic electromechanical dynamics
To predict the harmonic electromechanical dynamics of the nonlinear energy harvester coupled to the rectifying circuit, we build upon a strategy devised by Liang and Liao (2012) that was developed for linear energy harvesting platforms. Introducing a total phase
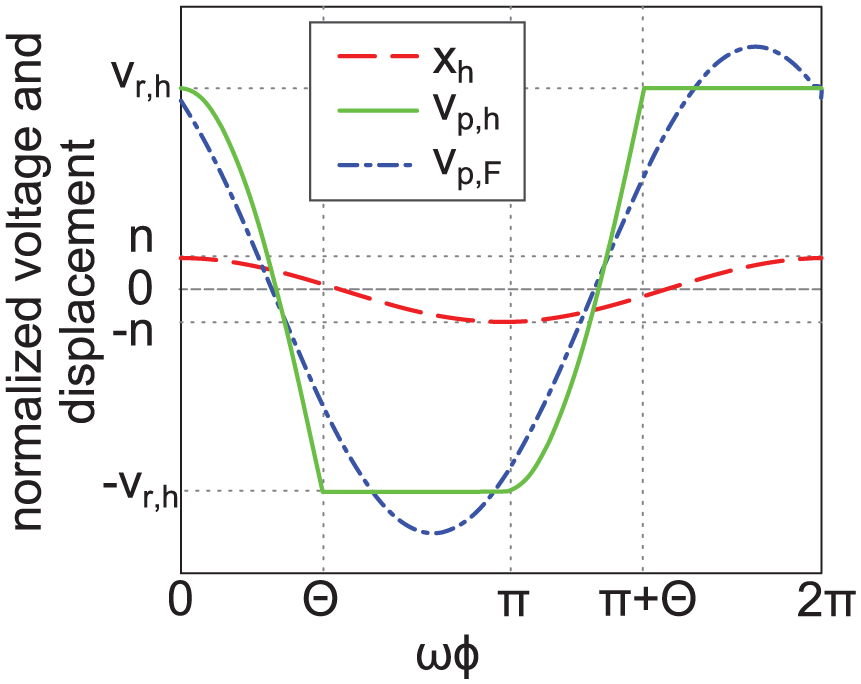
Representation of single period of voltage across the piezoelectric and displacement of the energy harvester, as adapted from Liang and Liao (2012).
Considering the sinusoidal form of the electromechanical responses and the switching conditions of equation (14c), the harmonic voltage across the piezoelectric electrodes
As shown in Figure 2,

according to the continuity of the piecewise functions. To leverage the harmonic steady-state assumptions of equation (14), a sinusoidal form of equation (16) is required. Thus,

In addition, assuming that the rectified voltage change per cycle is negligible compared to the mean value, an energy balance yields

Therefore, integrating equation (14c) in a semi-period yields

Consequently, the DC power associated with the harmonic base acceleration is

Then, the first-order time-harmonic of
The prior steps to yield equation (22) are comparable to the prior work (Liang and Liao, 2012). Yet, to leverage equation (22) for the nonlinear energy harvesting system of interest here, continued steps are required to provide meaningful predictions of the dynamic response. By virtue of the assumption of single harmonic response, it is here assumed that



where

Under steady-state conditions such that the time variations on the left-hand side of equation (23) vanish, one determines that

Then, equations (23b) and (23c) together yield

Equation (26) is a cubic polynomial in terms of
Stochastic electromechanical dynamics
Equation (26) characterizes the harmonic displacement response of the nonlinear energy harvester, out of which the corresponding piezoelectric beam voltage and rectified voltage are, respectively, computed from equations (22) and (20). Yet, it is seen that the polynomial of equation (26) is a function of the equivalent linear natural frequency
To determine relations among the mean-square nonlinear harvester displacement


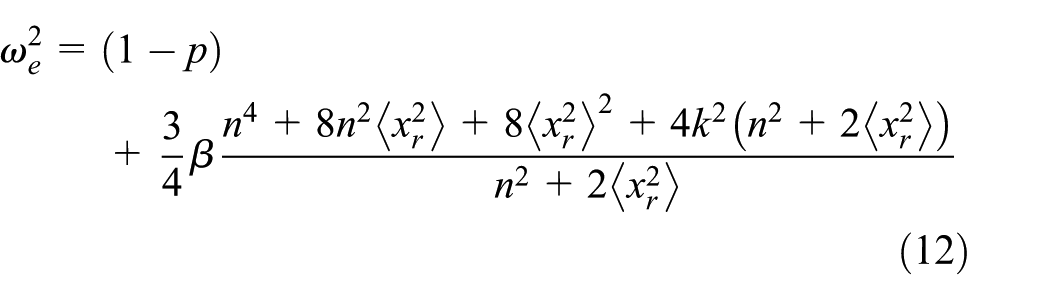
With equations (27) and (28), of the system equation (15) only equation (15a) requires solution. Yet, this equation is not amenable to straightforward solution. A second linear approximation is then made, assuming a new equivalent natural frequency

The error between equations (15a) and (29) is

Using the same procedures as in the prior section, one has

Toward solving equation (31), the expectation of the product of
Consequently, the new equivalent natural frequency is

Thereafter, the mean-square displacement

With equation (34), the piezoelectric and rectified voltages associated with the stochastic excitation are found from equations (27) and (28), respectively.
Combined harmonic and stochastic response of the nonlinear energy harvester
Considering the prior analytical formulation and nonlinear coupling of equations, equations (12), (26), and (34) must be simultaneously solved to compute the total response of the energy harvester when subjected to a combination of harmonic and stochastic base acceleration. Then, by equation (8), the total responses may be reconstructed.
In addition to the response forms reconstructed in equation (8), specific measures are useful to characterize the energy harvesting performance of the nonlinear platform. For instance, one meaningful measure is the total mean-square displacement

The total mean-square voltage across the piezoelectric electrodes is given by equation (36). Finally, the total mean-square rectified voltage across the resistive load R is computed from equation (37) which leads to the determination of the total DC power delivery to the load via equation (38)



All together, the new analytical approach builds greatly from prior work that studies the harmonically excited response of linear energy harvesters coupled with rectifying circuits (Liang and Liao, 2012) and from prior work that studies the structural dynamics of post-buckled oscillators subjected to harmonic and stochastic excitations (Harne and Dai, 2017). Indeed, the analysis of this report enables the first approach to explicitly predict the structural and electrical dynamics of nonlinear vibration energy harvesters subjected to arbitrary combinations of harmonic and stochastic excitations when coupled to rectifying circuit for DC power delivery.
Experimental methods
The experimental platform is shown in Figure 1(a). Laser displacement sensors (Micro Epsilon ILD-1420) measure the absolute cantilever tip displacement and absolute displacement of the electrodynamic shaker table. An accelerometer (PCB Piezotronics 333B40) also measures the shaker table acceleration in the same axis of motion. The base excitations are applied by a controlled electrodynamic shaker (LabWorks ET-140), as driven by an amplifier (LabWorks PA-141). The noise excitation component is defined as the variance of a normally distributed voltage time series that superimposes with a harmonic voltage time series, which together drive the shaker. The AC piezoelectric voltage across the electrodes of the energy harvester is recorded in addition to the rectified voltage evaluated over the resistive load. All channels of data are recorded at a sampling frequency of 4096 Hz and are thereafter digitally filtered from 1 to 500 Hz. The experimentally identified parameters of the nonlinear energy harvester and diode bridge circuit are provided in Table 1. As seen in the table, the load parameter p is greater than unity, which indicates that the energy harvester was subjected to enough magnetic force to induce bistability.
Experimentally identified system parameters.
Results and discussions
In order to verify the analytical predictions, direct numerical simulations of the governing equations are carried out using fourth-order Runge–Kutta numerical integration with increased tolerances on adaptive time-stepping routines in the MATLAB software. Initial conditions for the states of the electromechanical system are chosen from normally distributed random numbers approximately within an order of magnitude of the ultimate response state amplitude. The analytical and numerical efforts are undertaken in parallel with experimentation, using the parameters identified from the experimental platform, as given in Table 1. To determine the natural frequencies associated with each low amplitude intrawell response and the damping constant, impulsive ring down responses are undertaken. It is ensured that the influences of the magnets upon the ferromagnetic beam tip are positioned such that the natural frequencies around both stable equilibria are identical to
The following paragraphs present the collective analytical, numerical, and experimental results that enable the detailed study of excitation and electrical parameter influences upon the nonlinear energy harvester DC power delivery.
Electromechanical responses induced by pure harmonic excitation
As a limiting case of the model predictions, the vibration energy harvester is first subjected to base acceleration of amplitude
For this excitation condition, Figure 3(a) and (b) presents the analytical (curves) and numerical (data points) results of the beam tip harmonic displacement amplitude and average charging power, respectively, while the corresponding experimental measurements are shown in Figure 3(c) and (d). According to the analytical and simulation results, for harmonic excitation frequencies less than around 20 Hz, the bistable energy harvester may exhibit either the large amplitude snap-through dynamics or the low amplitude “intrawell” responses associated with oscillations around one or the other stable equilibria. Such coexistence of dynamic regimes is revealed by more than one analytical prediction or numerical simulation data point for the same harmonic excitation frequency less than about 20 Hz, in Figure 3(a) and (b). At higher frequencies, only the low amplitude oscillation is found. Together, the analytical and numerical results are in overall good agreement across the whole frequency range, excepting around 20–25 Hz where the simulations suggest aperiodic or chaotic states of vibration may occur, which the analysis is unable to predict by virtue of steady-state assumptions. Considering these different dynamic regimes, it is clear from Figure 3(b) that the snap-through dynamics are the favored behavior for enhancing DC power delivery. Indeed, in Figure 3, a range of load resistances is considered:
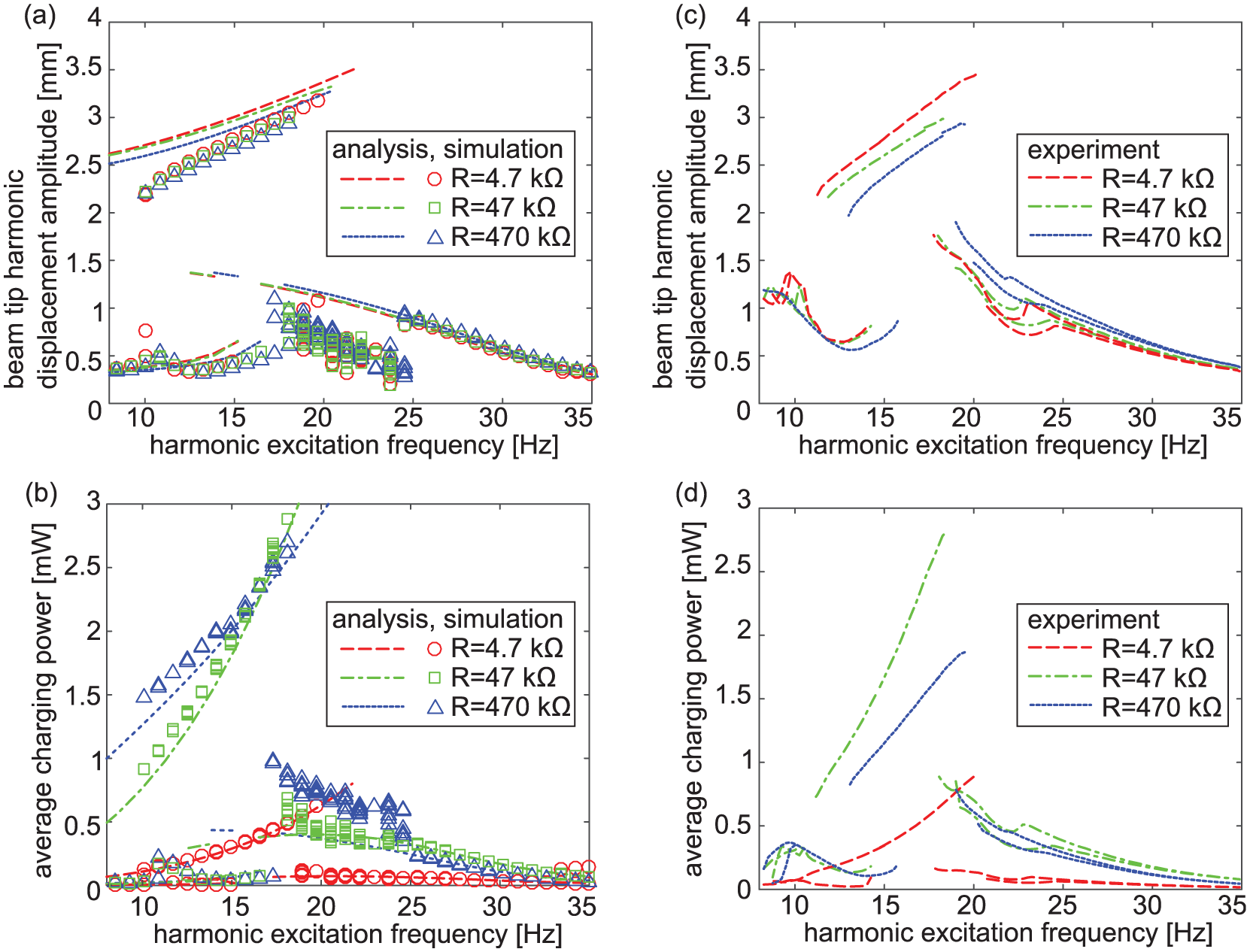
Analytical prediction (in lines) and simulated results (in shapes) of (a) beam tip harmonic displacement magnitude at the harmonic excitation frequency and (b) average charging power across resistive loads R, under pure harmonic excitation with amplitude
In the corresponding series of experiments, harmonic base acceleration is applied with slowly sweeping frequency from low to high and then high to low values at a rate of 0.09 Hz/s. The experimental results shown in Figure 3(c) and (d) are in good qualitative and quantitative agreement with the model findings. In particular, the potential for an optimal resistance for DC power delivery is also apparent in the measurements since the resistor of 47 kΩ provides the highest peak DC power among the three values of resistances examined. Also, the bandwidth of the snap-through dynamic regime is suppressed by increase in the resistance, which is likewise revealed both analytically and numerically.
Overall, the results of Figure 3 establish that the analytical model accurately reproduces the electrodynamic behaviors of the bistable nonlinear energy harvester under the limiting case of pure harmonic excitation. The following section examines the influence of the additive stochastic excitation contribution on the dynamic response and DC power generation.
Nonlinear energy harvesting under combined harmonic and stochastic excitations: case example
Then, in addition to the harmonic amplitude of base acceleration
In Figure 4(a) and (b), the analytical results are shown for the pure harmonic case (dashed-dot curves) and for the case with the additive noise (solid curves). Figure 4(a) and (b) shows the beam tip harmonic displacement amplitude and the average charging power, respectively. As shown in Figure 4(a) and (b), the numerical results are shown as gray data points for all of the simulations and as filled red squares for the averages of the simulations at any specific harmonic excitation frequency. Figure 4(c) and (d) presents the corresponding experimental findings, with the pure harmonic data sets indicated with solid curves and the short-time averages of the measurements under the combined harmonic and stochastic base excitations plotted as red filled circles.
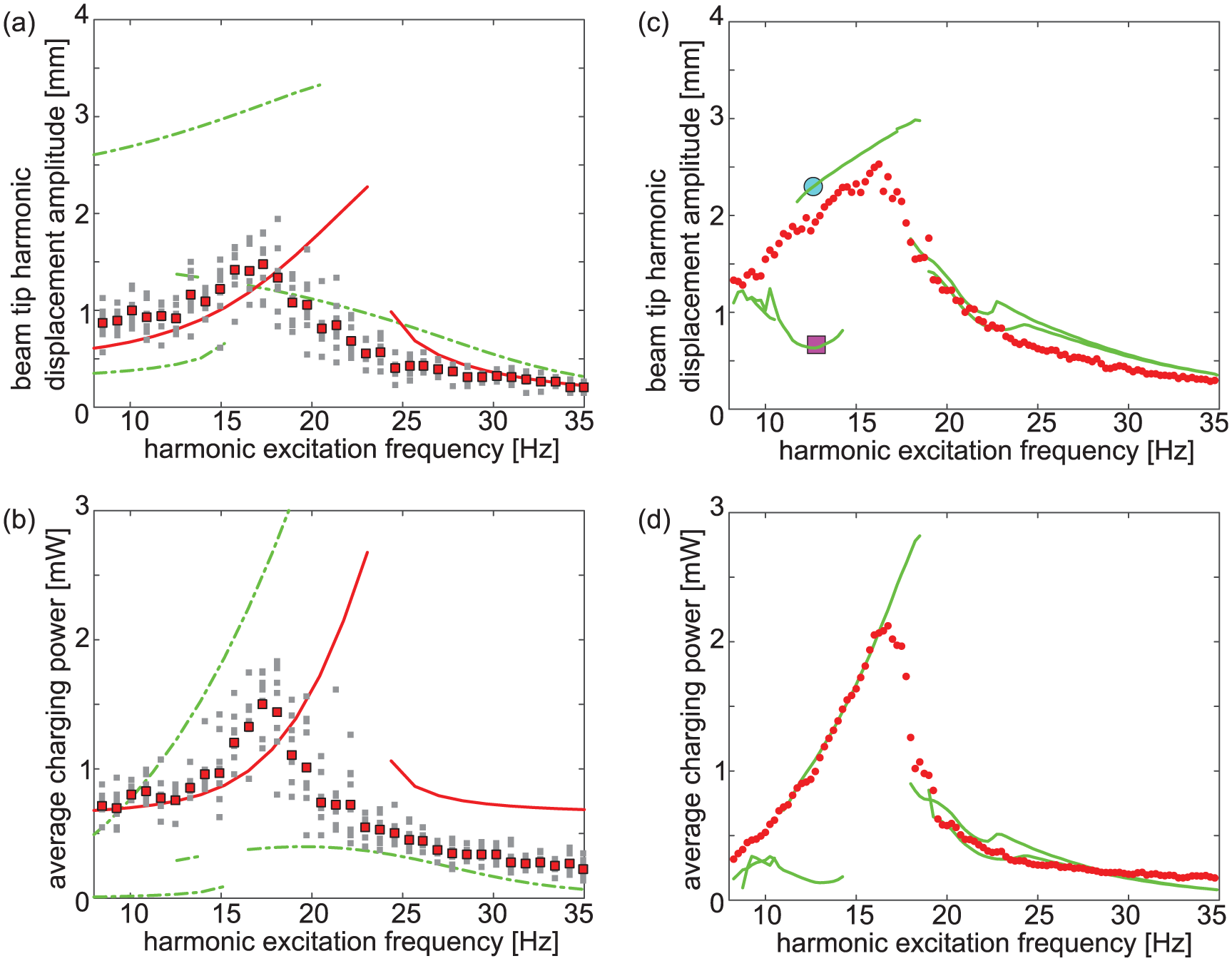
Analytical predictions and numerical simulations of (a) beam tip harmonic displacement magnitude at the harmonic excitation frequency, (b) average charging power across resistive loads R = 47 kΩ, with harmonic excitation amplitude
According to the analytical predictions shown in Figure 4, due to the additive noise excitation component, the nonlinear harvester loses the ability to undergo coexistent responses, since only one dynamic regime is predicted analytically at any given frequency, across the bandwidth considered. This result is in agreement with the outcomes of the numerical simulations. The introduction of the stochastic excitation component causes the displacement amplitudes in Figure 4(a) to reduce considerably from the levels associated with harmonic snap-through, although the displacements are still greater than the low amplitude dynamic regime. The average charging powers shown in Figure 4(b) are correspondingly reduced; at frequencies less than about 20 Hz, the powers are approximately one-half of the levels achieved for the harvester when snap-through dynamics are triggered under pure harmonic excitation. Yet, the experimental measurements in Figure 4(c) do not discover as great of reduction in the response as predicted analytically and observed numerically. In particular, while the noise also suppresses the coexistence of the dynamic regimes, it does not as greatly impact the response amplitudes, whether considering the displacement or charging power. One explanation for this difference between experiment and model is that the overall dissipation of energy in the harvester is modeled by a viscous damping. Yet, the piezoelectric beam used experimentally contains a significant proportion of glass-reinforced epoxy laminate, which is a viscoelastic material and as such leads to frequency- and rate-dependent damping properties (Fosdick et al., 1998; Ketema, 1998). Thus, the omission of viscoelastic damping in the current model may explain the difference between experimental measurements and model predictions, which encourages a more accurate model formulation in future to apply such a nonlinear energy harvester in practice. Despite such minor differences in the amplitudes of the displacement and DC comparing the model predictions and measurements, the experimental results are still in overall good agreement with analytical prediction as well as the numerical simulation. Thus, the theoretical formulation and solution procedure established here are sufficiently validated.
Considering the influence of the stochastic contribution to the overall base excitation upon the harvester, Figure 4(b) and (d), while the peak DC power delivery may be reduced, a favorable outcome is the elimination of the coexistence of low amplitude and snap-through dynamics at low frequencies. This results in a form of insurance to obtain a meaningful DC power level closer in value to the result achieved under pure harmonic excitation. Both model results and experimental measurements reveal such behaviors.
To look deeply at the impact of additive stochastic excitation, experimental time series at 13 Hz are presented in Figure 5. The time series of base acceleration is shown in Figure 5(a) with and without the stochastic component, recalling that the ratio of noise standard deviation to harmonic amplitude is 3/2, which explains the considerable differences between the two time series of base acceleration. The beam tip displacement time series is shown in Figure 5(b) and (d) while the corresponding voltages across the piezoelectric beam electrodes and across the load resistor R = 47 kΩ are shown in Figure 5(c) and (e). For the low amplitude intrawell oscillation, Figure 5(b) and (c), the additive stochastic excitation provides a beneficial perturbation away from the low amplitude dynamic state, inducing greater mechanical response and hence rectified voltage. This is seen in Figure 5(b) and (c) comparing the time series response without noise (dashed or dotted curves) to those measures with noise (solid or dash-dot curves). The corresponding impact on the electromechanical snap-through dynamics are shown in Figure 5(d) and (e). According to Figure 5(d) and (e), the additional stochastic excitation slightly reduces peak-to-peak piezoelectric voltage generation, although the displacement amplitude is not reduced overall. Yet, because the snap-through response is perturbed from a steady state, the measurements show that the loss of rectified voltage results in an overall reduction in the charged voltage across the resistor, and hence less DC power.
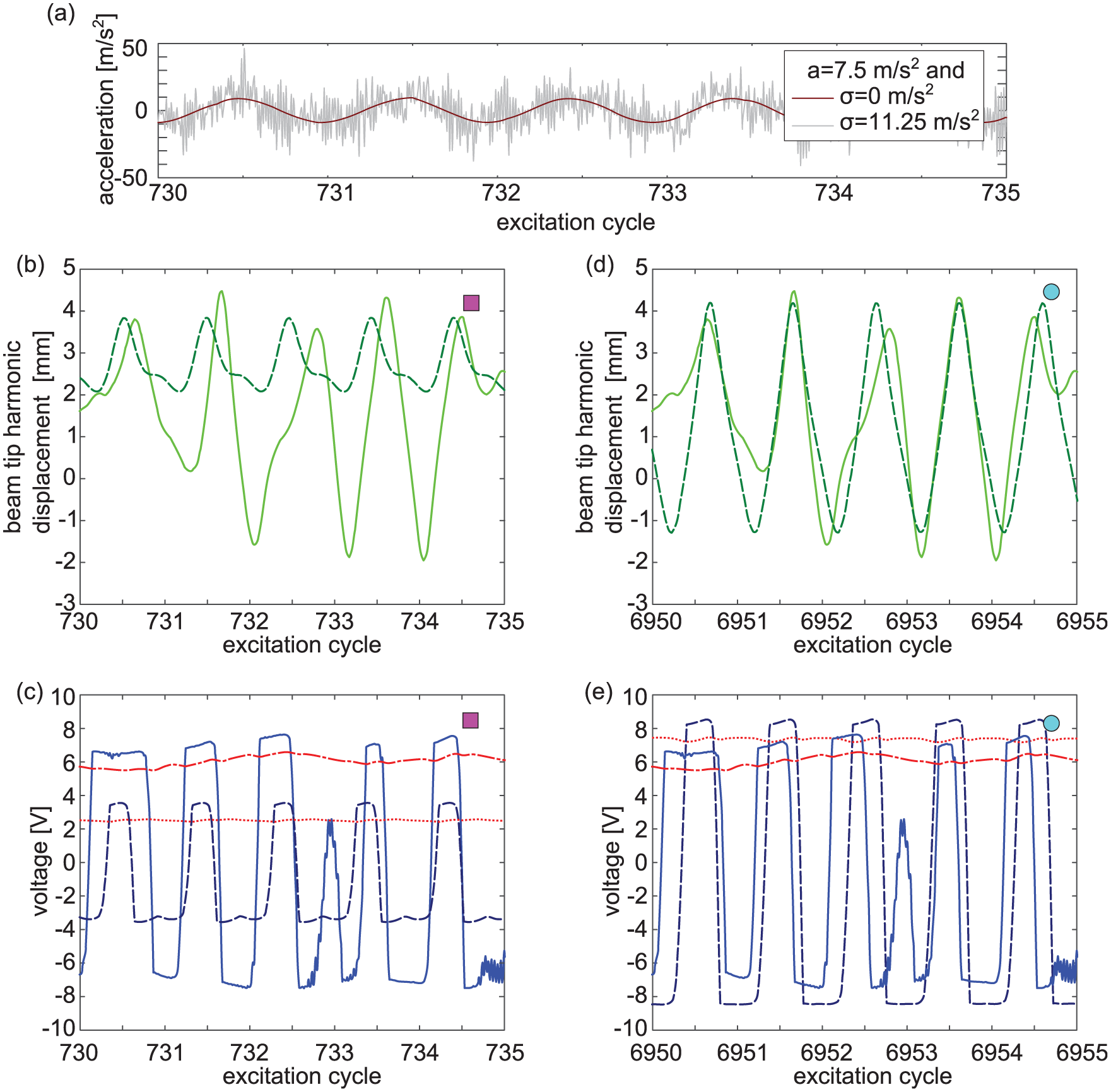
Portions of time series of experimental measurements for the (a) base accelerations provided to the energy harvester for harmonic-only and combined harmonic with stochastic excitations, (b, d) beam tip displacement without noise (dashed curves) and with noise
DC power delivery for varied levels of stochastic excitation
As found from the results of the previous section, the additive stochastic excitation component may significantly change the electromechanical responses of the bistable nonlinear energy harvester. And as exemplified in the time series of Figure 5, the effects of the noise on the overall behavior are unique whether the underlying steady-state response is a coexistent low amplitude intrawell oscillation or the high amplitude snap-through dynamic. To closely investigate these influences, this section examines a wide range of stochastic excitation levels with respect to a fixed harmonic level of base excitation.
Figure 6 presents analytical, numerical, and experimental results obtained when the 13 Hz harmonic excitation amplitude is
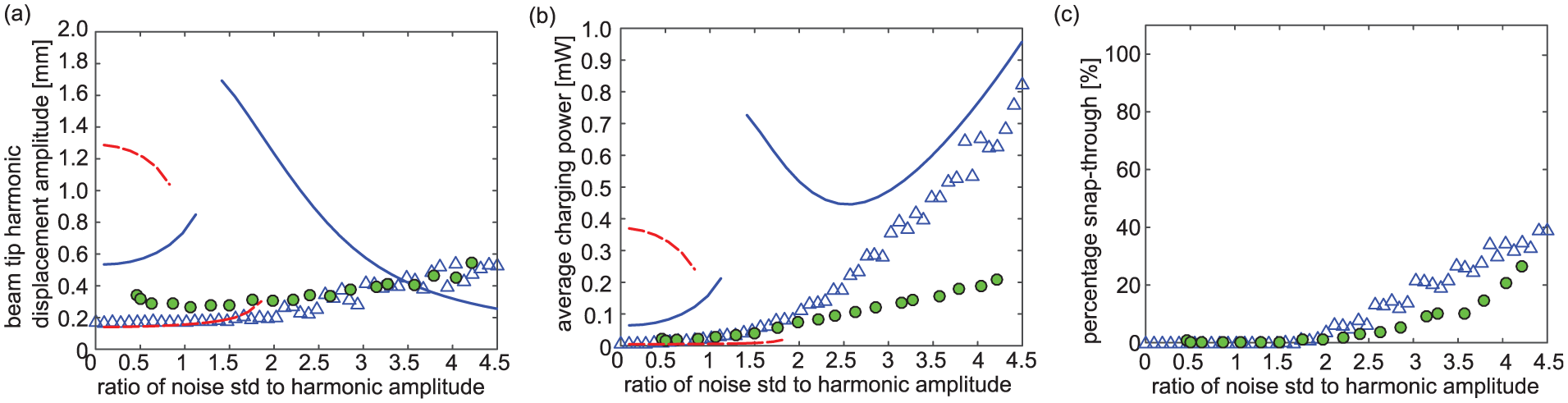
(a) Harvester harmonic displacement amplitude, (b) average charging power across resistive load R = 470 kΩ, and (c) percentage of time that the beam spends snapping through, as a function of the ratio between noise standard deviation and harmonic amplitude of the base excitation. Blue solid (red dash) curves indicate analyzed responses associating with snap-through (intrawell) dynamics, blue triangles are the simulated results, and green filled circles indicate experimental measurements. In all cases, the harmonic excitation amplitude is
As the noise standard deviation is increased respecting the harmonic amplitude of the excitation, the DC power gradually increases, with a significant growth observed analytically, numerically, and experimentally around a ratio of
Figure 7 presents results considering greater amplitude of the harmonic base excitation,
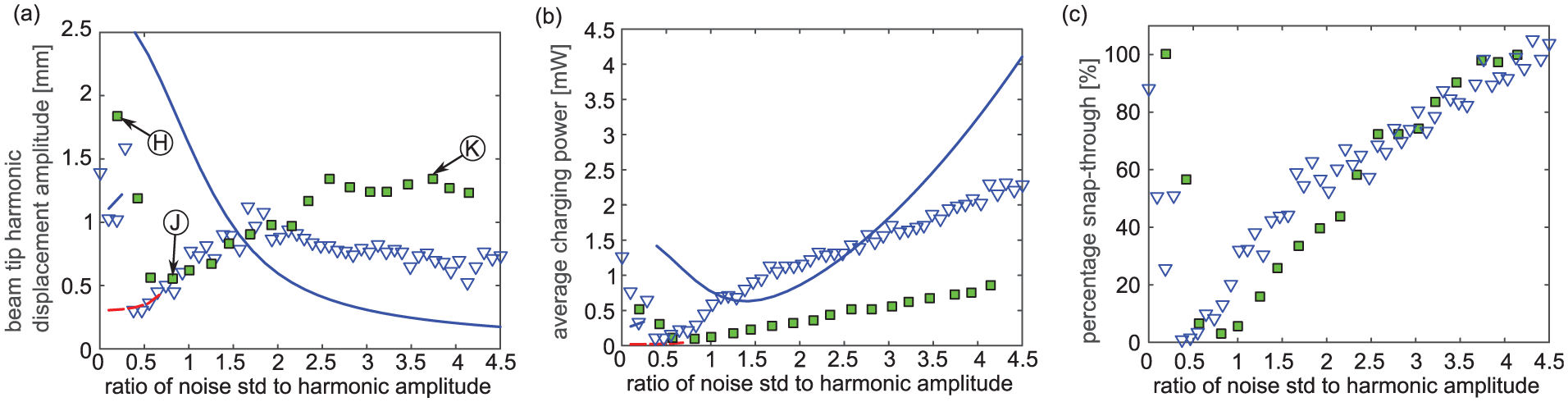
(a) Harvester harmonic displacement amplitude, (b) average charging power across resistive load R = 470 kΩ, and (c) percentage of time that the beam spends snapping through, as a function of the ratio between noise standard deviation and harmonic amplitude of the base excitation. Blue solid (red dash) curves indicate analyzed responses associating with snap-through (intrawell) dynamics, blue triangles are the simulated results, and green filled circles indicate experimental measurements. In all cases, the harmonic excitation amplitude is
These features are illuminated further by observing the time series of electromechanical response labeled as H and J in Figure 7(a). In Figure 8, the response labeled as H is shown in (a) for displacement and (b) for piezoelectric and charging voltages, which consider a case when the noise is insignificant in standard deviation when compared to the amplitude of the harmonic excitation. When the ratio
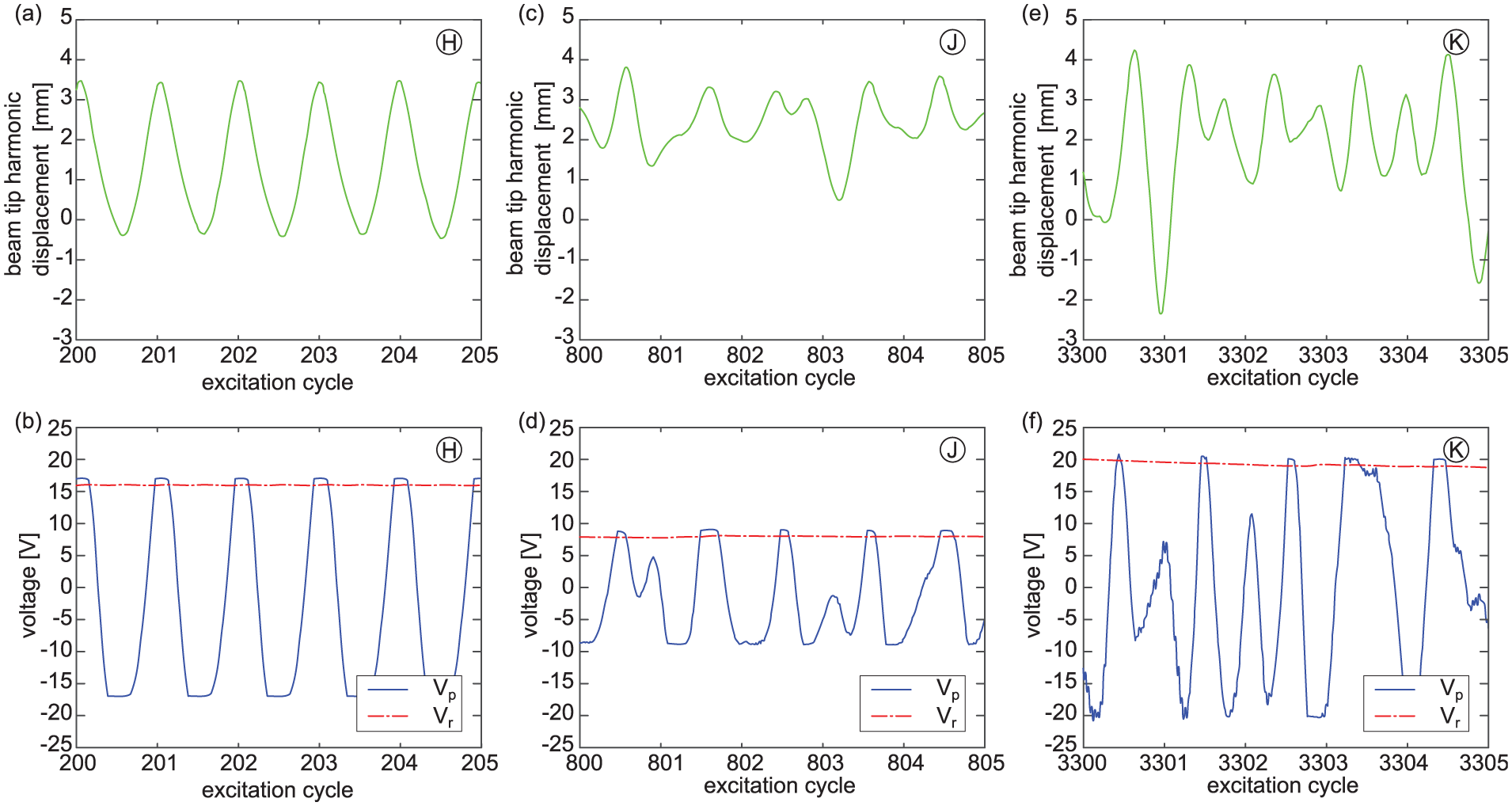
Portions of experimentally measured time series of points as indicated by labels H, J, and K from Figure 7(a). Here, (a, c, e) show beam tip displacement, and (b, d, f) show corresponding piezoelectric beam voltage and charging voltage across resistive load R = 470 kΩ.
Studying the results of Figure 7(a) further, when the ratio
Conclusion
In order to take advantage of the broadband and large power generation characteristics of nonlinear energy harvesters for self-sufficient sensors in structural health monitoring applications, this research investigated DC power generation from nonlinear vibration energy harvesters subjected to excitations that contain realistic combinations of harmonic and stochastic components. These efforts of this work established a new analytical method to predict the overall electromechanical responses induced under such excitations, including the DC power delivery from rectifier circuits coupled to such nonlinear harvester platforms. With numerical verification and experimentally validation, the accuracy of the analysis is exemplified. Through subsequent model and experimental studies, it is found that despite the introduction of stochastic excitation, the DC power may be increased from steady-state levels associated with the low amplitude intrawell dynamic regime. The noise excitation contribution has more intricate influences upon the snap-through responses: the additive noise reduces the mean DC power generation at low harmonic excitation frequencies when snap-through is achieved under pure harmonic excitations, while the stochastic excitations are beneficial when the ratio of noise standard deviation to harmonic amplitude is greater than about two. The outcomes indicate that the analytical model formulation and solution strategy have potential to assist in the design and implementation of nonlinear energy harvesters in real world application for improved, practical performance. In addition, due to the dependence of DC power generation on the resistive load, harmonic excitation characteristics, and additive stochastic excitation levels, optimization studies are promising directions for further investigations toward capitalizing on nonlinear energy harvesters deployed in real world environments.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by The Ohio State University Center for Automotive Research. The authors also acknowledge support from Midé Technology Corp.