
Abstract
In the present work, a new unsteady analytical model is developed for magnetorheological fluid flow through the annular gap which is opened on the piston head of twin tube magnetorheological damper, considering fluid inertia term into the momentum equation. This new unsteady model is based on Stokes’ second problem that is extended for magnetorheological fluid flow between finite oscillating parallel plates under the pressure gradient. A quasi-static analysis is also developed for magnetorheological fluid flow in twin tube damper, to compare its results with present unsteady solution and to show the effect of magnetorheological fluid inertia. The obtained results are validated experimentally and then, a parametric study is presented using both unsteady and quasi-static analysis. The effect of fluid inertia term is investigated on force–displacement and force–velocity loops, magnetorheological fluid velocity profile, pressure drop, phase difference between pressure drop and flow rate and change of plug thickness with time duration. According to the obtained results, quasi-static analysis included considerable error respect to new unsteady analysis as the gap height, magnetorheological fluid density, excitation frequencies and amplitudes are increased and yield stress is decreased. It is found that the plug thickness is considerably affected by inertia term of magnetorheological fluid.
Keywords
1. Introduction
Magnetorheological fluid (MRF) and electrorheological fluid (ERF) are smart fluids that display a reversible and rapid transition behavior from a free flowing state to a semi-solid state in the presence of external magnetic and electric field. The yield stress of smart fluids can be changed and controlled by tuning the intensity of the applied field. One of the most important applications of magnetorheological fluid (MRF) and electrorheological fluid (ERF) are magnetorheological (MR) and electrorheological (ER) dampers which are employed in vibration control of vehicles and building structures.
In the past decades, many studies have been conducted for MRF and MR damper modeling. Experimental, computational fluid dynamics (CFD), and analytical modeling of MR dampers have been presented by several researchers (Parlak and Engin, 2012; Soda et al., 2001; Sternberg et al., 2014; Wereley and Pang, 1998). Analytical model can be used instead of more complex and expensive CFD or experimental models. In analytical models, Navier–Stokes equations are solved analytically for MRF and ERF flow. A non-dimensional analysis was investigated by Phillips (1969), where a set of non-dimensional variables and a corresponding polynomial solution was developed to determine the pressure gradient of the flow through a parallel duct based on quasi-static analysis. Bingham plastic and biplastic force responses to constant velocity input were compared by Dimock et al. (2002), using quasi-static analysis. A quasi-static axisymmetric model of MR dampers was derived and then compared with both a simple analytical parallel plate model and experimental results by Yang et al. (2002). They found that these models are not sufficient to describe the dynamic behavior of MR dampers and a mechanical model based on the Bouc–Wen hysteresis model was developed by them. Four non-dimensional design parameters based on the Bingham plastic constitutive equation of the MRF were defined by Hong et al. (2005). They investigated the design characteristics of each parameter and then formulated sequential design steps for the MR damper. An axisymmetric quasi-steady Bingham plastic model for an MR flow mode damper was analyzed by Yoo and Wereley (2005). They approximated equivalent viscous damping coefficient (Ceq/C) for the annular duct which was equivalent with the one for the rectangular duct when the small gap assumption was applied. Ai et al. (2006) developed a mathematical model for the MR valve with both annular and radial flow paths based on quasi-static assumption. According to their results, the efficiency of the MR valve with circular disk-type fluid resistance channels is superior to that with annular fluid resistance channels under the same magnetic flux density and outer radius of the valve. Brigley et al. (2007) presented an experimental and theoretical evaluation of novel type of multi-mode MR isolator against multi-degree-of-freedom excitations. For theoretical model of the MR isolator, its dynamic equation was derived and important model parameters was identified by the force averaging method. A parametric study of a MR valve and a MR orifice was investigated by Grunwald and Olabi (2008) based on quasi-study assumption. According to their results, achievable pressure drop for the valve layout was significantly higher than those for the orifice layout. A quasi-study analytical non-dimensional Bingham model for mixed-mode MR damper was described by Hong et al. (2008). They analyzed the effects of the Bingham number and the hydraulic amplification ratio on the non-dimensional plug thickness and equivalent viscous damping coefficient. Wang et al. (2009) analytically and experimentally compared the performances of a MR valve with both annular and radial fluid flow resistance gaps with those of the MR valve with only annular fluid flow gaps. According to their results, the pressure drops across the MR valve with both annular and radial fluid flow gaps are larger than those across the MR valve with only annular fluid flow gaps for varying valve parameters. Due to the yield behavior of MRFs, viscoplastic rheological models are usually used to describe the behavior of MRFs (Ghaffari et al., 2014). One of the most convenient rheological models for ERF and MRF is Bingham plastic model (Kamath et al., 1996; Yoo and Wereley, 2005), which is used in present new unsteady analytical model. The quasi-static analysis for the MRF flow in the annular duct was evaluated by Khan et al. (2014). They mathematically modeled the MR damper based on Bingham plastic model and Herschel–Bulkley model. Usually, analytical solutions and all design formulas are based on quasi-static steady assumption (Ai et al., 2006; Brigley et al., 2007; Dimock et al., 2002; Ghaffari et al., 2014; Grunwald and Olabi, 2008; Hong et al., 2005, 2008; Kamath et al., 1996; Khan et al., 2014; Parlak and Engin, 2012; Phillips, 1969; Wang et al., 2009; Yang et al., 2002; Yoo and Wereley, 2005a, 2005b). This assumption is suitable under steady-state conditions and very low range of the oscillatory frequency.
Despite considerable effect of fluid inertia and unsteady behavior of MRF flow, it is ignored in most of previous studies. Therefore, it is important to study unsteady-state conditions of MRF flow within MR damper to describe its actual operation. Chen et al. (2004) solved pressure gradient and velocity profile of the unsteady-state unidirectional flow of Bingham fluid between parallel plates using the Laplace transform method. No diagram was plotted in their paper to validate and evaluate the results of their method. A new method for dynamic modeling of an ER damper was proposed by Nguyen and Choi (2009), considering the unsteady behaviors of ERF flow through the annular duct. According to their results, the effect of unsteady behavior should be taken into account at high frequencies. In their study, the implemented equilibrium equation was based on quasi-static assumption which seems a wrong assumption for an unsteady analysis. Yu et al. (2013) theoretically analyzed unsteady flow of MRFs within flow mode MR dampers (with valve parallel to cylinder and fix walls), by means of numerical velocity solutions of partial differential equation (PDE) and variable separation method. The Newtonian regions, in parallel to the coil, are not considered in their calculations for damping force.
The purpose of the present study is to introduce a novel unsteady analytical model, based on Stokes’ second problem (Stokes, 1851), for MRF flow through the annular gap which is opened on the piston head of twin tube MR damper, considering fluid inertia term into the momentum equation. Here, governing equation for MRF flow in annular gap inside the moving piston of MR damper is solved based on the extending Stokes’ second problem for non-Newtonian (MR) and Newtonian fluid flow through oscillating parallel plates under the periodic pressure gradient. Using this method, velocity profile is predicted for different flow regions. Then pressure gradient and also inner and outer boundaries of plug region within the gap is obtained by solving nonlinear systems of equations. A quasi-static analysis is also developed for MRF flow in annular gap inside the moving piston head, to compare its results with present unsteady analysis results. The unsteady and quasi-static analysis results are validated by comparing them against experimental data. Then, under different excitation frequencies and amplitudes, yield stresses, densities and gap heights, operation of MR damper are investigated in detail.
2. Problem statement
A schematic view of a twin tube MR damper is shown in Figure 1. Due to the motion of piston, the oil flows through the annular gap inside the piston. Regions within the gap in parallel to coil are not magnetized (are not affected by magnetic field) and the fluid in these regions could be considered Newtonian while the regions within the gap in parallel to flange are magnetized so the fluid in these regions is non-Newtonian (Bingham plastic). The ratio of gap to piston diameter is small, so the flow through the gap can be considered as the two-dimensional flow between parallel plates which is shown in Figure 2. This approximation is seen to be adequate for practical design and commonly is used to approximate ER/MR behavior in annular geometries (Burton et al., 1996; Gavin, 1998; Jolly et al., 1999; Kamath et al., 1996; Wereley and Pang, 1998; Yang et al., 2002). In this study, an unsteady analytical model is proposed based on solving the momentum equations and extending Stokes’ second problem (Stokes, 1851) for non-Newtonian (MR) and Newtonian fluids flow between oscillating parallel plates with finite depth under the periodic pressure gradient.
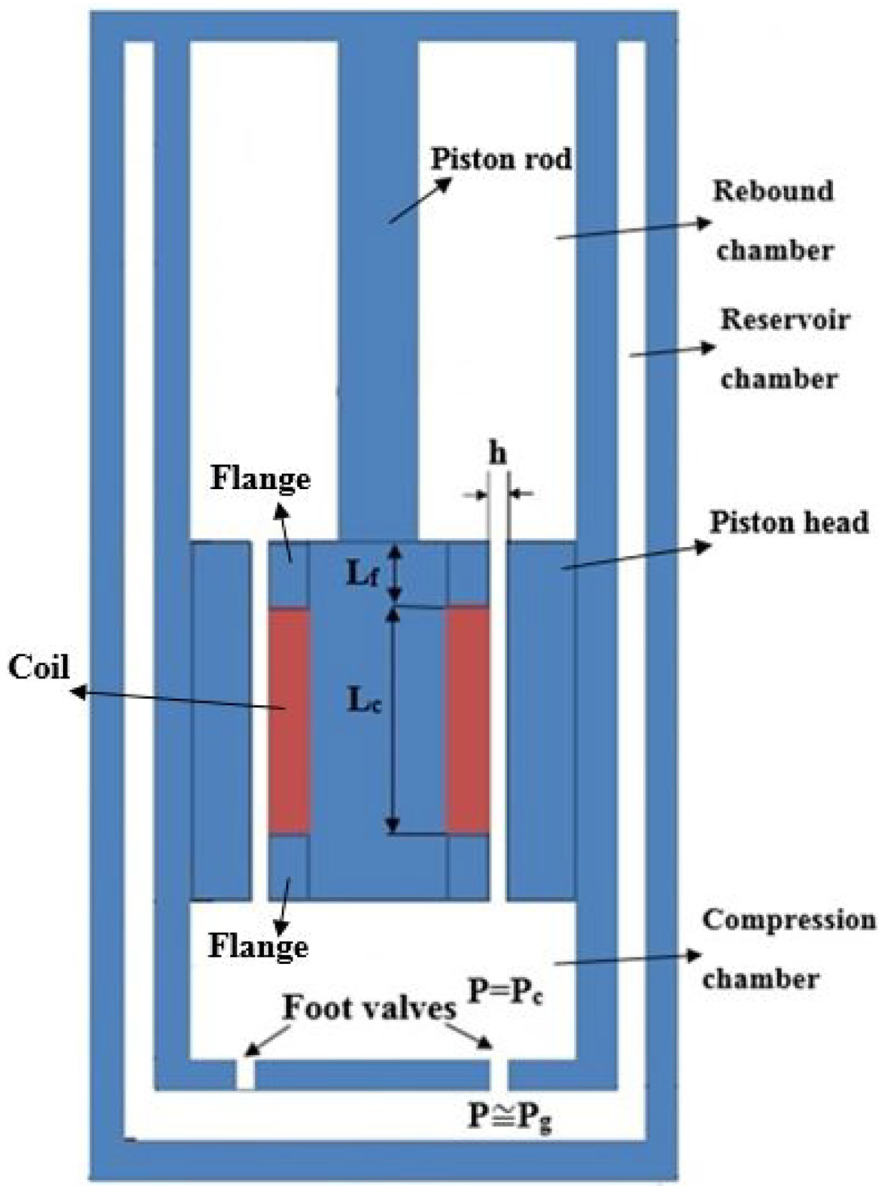
Schematic view of twin tube MR damper.
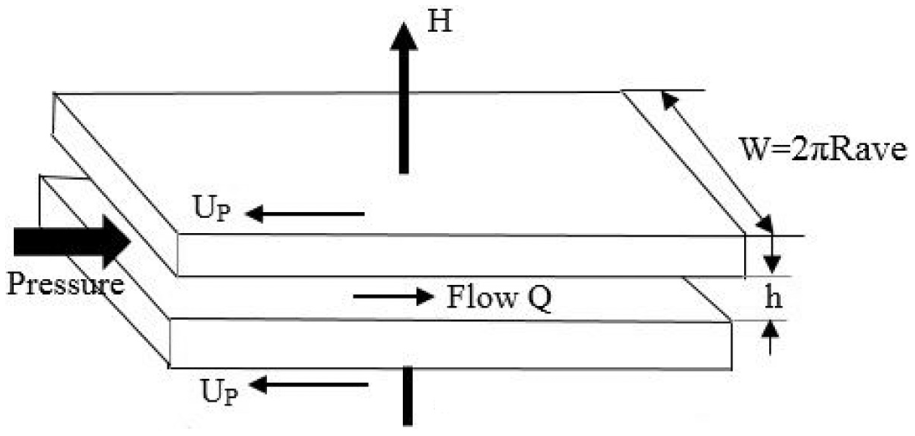
Schematic view of approximated parallel plate model of gap inside the piston.
3. Governing equations and constitutive equation
The governing equations consist of the continuity and momentum equations for incompressible flows


where t is time, U is velocity vector, ρ is density,
Here, Bingham plastic model is employed to describe the non-Newtonian behaviors of the MRF. In this model, shear stress is given as follows (Kamath et al., 1996; Yoo and Wereley, 2005)


where τ is the shear stress, τy is the yield stress due to the applied magnetic field,

In the axisymmetric model, the yield stress τy is related to r due to the radial distribution of the magnetic field in the gap. However, if
4. Unsteady analysis
4.1. Determining the velocity field
Due to the fluid flow inside the moving piston, a non-inertial coordinates system which is moving with the accelerating system can be used (White, 2006). Here, it is assumed that the non-inertial coordinates system is attached to the piston. Therefore, the absolute acceleration,


Substituting equations (6) and (7) into equation (2) gives

Flow field can be approximated as flow through two oscillating parallel plates that is shown in Figure 2. The analytical solution of governing equations is too complex for unsteady flows. Using the present method, PDE is simplified to ordinary differential equations (ODEs) which reduces the difficulties of solving the original PDE. Here, based on Stokes’ second problem (Stokes, 1851), for a long-time steady oscillation, the transient or start-up of the flow can be neglected (White, 2006) and the steady oscillatory solution of equation (8) can be expressed in the form of equation (9). The pressure gradient is also defined as equation (10), so that the argument of complex value of K is related to the phase difference between velocity and pressure gradient. Velocity and acceleration of piston can be shown in equations (11) and (12), respectively. In these equations,




Substituting equations (9) to (12) into equation (8) gives the following ordinary differential equation

By solving equation (13), the relative and absolute velocity is obtained as
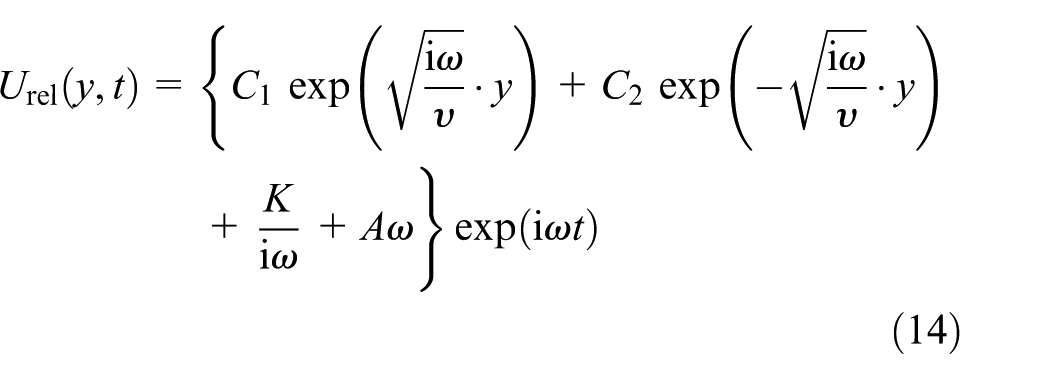
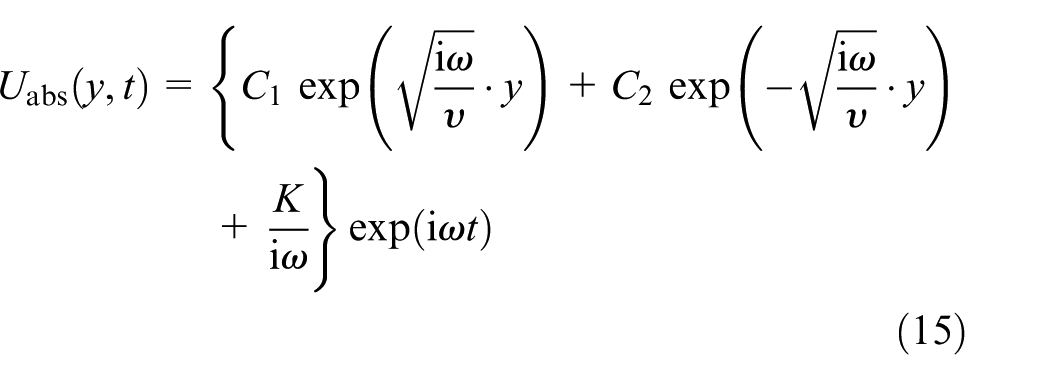
Due to considering the constant values for yield stress and viscosity, the Navier–Stokes equations for the Newtonian region is the same as the one for the post-yielded region of MRF (equation (8)). Therefore, the overall form of the obtained velocity profile (equation (15)) is the same for both regions; butte constants of velocity profile of each region are different and are obtained from the corresponding boundary conditions that are given in Table 1. A schematic view of the velocity profile and boundary conditions of non-Newtonian flow region in gap is shown in Figure 3(a). In this figure, regions 1 and 3 are the post-yield regions, where the shear stress exceeds the yield stress and the fluid flows, and region 2 is plug flow region, where the shear stress is less than the yield stress and velocity is constant across this region. Here, ypi and ypo are inner and outer boundaries of plug flow region. A schematic view of the velocity profile of Newtonian flow region is also shown in Figure 3(b). Applying the given boundary conditions presented in Table 1, C1 and C2 are obtained for fluid velocity profile of each region which are expressed in following sections.
Boundary conditions in each region.

MR: magnetorheological.
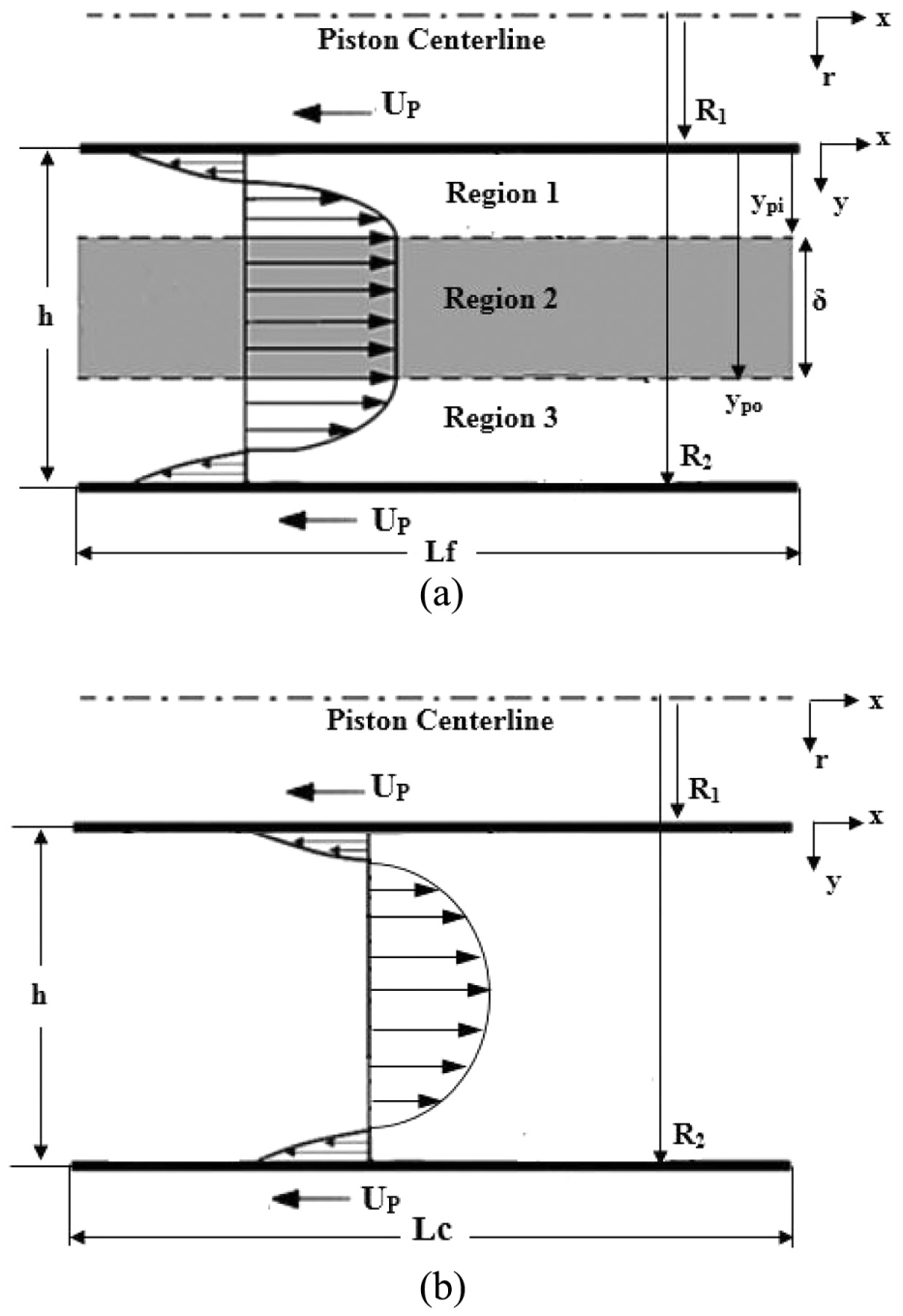
Schematic view of absolute velocity profile and boundary conditions for (a) non-Newtonian (MR) regions and (b) Newtonian regions.
4.1.1. Newtonian regions
Regions within the gap in parallel to the coil are not magnetized and the fluid in these regions is Newtonian. Two constants of C1 and C2 are obtained for fluid velocity profile of these regions as follows
4.1.2. Non-Newtonian (MR) regions
The regions within the gap in parallel to flange are magnetized so the fluid in these regions is non-Newtonian (Bingham plastic). As shown in Figure 3(a), this region is divided into post-yield regions (regions 1 and 3) and plug region (region 2). Applying the given boundary conditions which are introduced in Table 1, C1 and C2 are obtained for fluid velocity profile of each region as follows:
Region 1

Region 2
Because the velocity is constant across the plug region, so

C 1 and C2 for the velocity profile in this region are the same as the one for region 1 or region 2.
Region 3
4.2. Obtaining pressure drop in Newtonian regions
We need an additional equation to obtain the pressure drop in Newtonian regions (in parallel to the coil). The additional equation can be obtained based on the equality of the flow rate through the gap, Qg, with the volume flow rate which is displaced by the piston head, Qp


where


Then, pressure gradient dP(t)/dx)N and pressure drop ΔP(t)N in Newtonian regions can be determined using the obtained K and equation (27) as follows

4.3. Obtaining pressure drop, ypi and ypo, in non-Newtonian (MR) regions
For non-Newtonian regions (in parallel to flanges), three coupled nonlinear equations should be solved numerically to determine three unknown of K, ypi, and ypo. Then, pressure gradient (dP(t)/dx)MR can be determined using the obtained K. The three nonlinear equations with three unknown of K, ypi, and ypo are continuity equation, continuity of velocity profile at boundaries of plug region, and force equilibrium for plug region, which are introduced in following sections.
4.3.1. Continuity equation
The total volume flow rate through the gap,

which leads to
where Uabs1(y, t), Uabs2(y, t), and Uabs3(y, t) can be substituted from equations (15) to (22).
4.3.2. Continuity of velocity profile at boundaries of plug region
The velocity of MRF flow at the boundaries of the plug region (region 2) should be equal due to the fact that the velocity is constant across the plug region, so

Equation (30) includes three unknowns of K, ypi, and ypo.
4.3.3. Force equilibrium for plug region
As shown in Figure 4, MRF enclosed in plug region between y = ypi and y = ypo (region 2). Force equilibrium for this region leads to

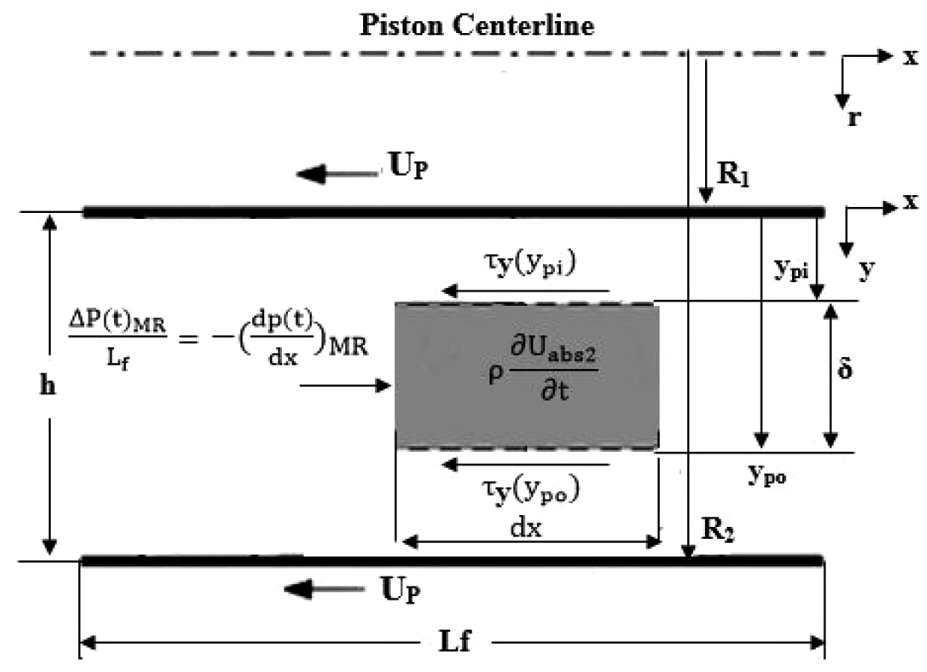
Force equilibrium of plug region (region 2).
The system of three nonlinear equations (29) to (31) with three unknowns is solved numerically and K, ypi, and ypo are obtained. Then pressure gradient and pressure drop in MR regions can be determined from equation (32)

Also, the plug thickness δ(t) can be obtained from resultant plug boundaries, ypi and ypo, in each time as follows

On the other hand, considering equation (32) and rewriting equation (31) yield the following relation for the plug thickness

4.4. Damping force
As there are two MR regions in parallel to flanges and one Newtonian region parallel to the coil in annular gap of piston, the total pressure drop can be obtained from equation (35)

where ΔP(t)N and ΔP(t)MR can be determined from equations (27) and (32). Then, damping force can be obtained as

where Pc is pressure of compression chamber and according to Figure 1, can be determined in compression and rebound as follows


Assuming that the volume of gas Vg in the reservoir chamber satisfies the equation of polytropic processes (Ferdek and Luczko, 2012), the pressure of the gas Pg in each time can be obtained from

where n is the coefficient of the polytropic and is assumed to be n = 1.4 (Ferdek and Luczko, 2012). V0 and P0 are initial volume and pressure in the reservoir chamber. Also, Vg in each time can be determined as

where Xp(t) is piston displacement and is assumed to be a sinusoidal excitation as follows

Pressure difference of the foot valves,

where estimated values of the discharge coefficient Cd are likely to be around 0.7, practically (Dixon, 2007). Avalve is effective area of the valves and Qvalve is the flow rate in valves that can be determined as

Also,
5. Quasi-static analysis
The quasi-static analysis is usually used to design the MR dampers. Convectional design formulas (Nguyen and Choi, 2009) and analyses (Wereley and Pang, 1998) for approximate rectangular parallel plate model of the valve mode MR damper were presented for a valve with fixed walls. When the annular gap is located inside the moving piston, the motion of the wall should be taken into account as boundary conditions. In this study, a quasi-static analysis is developed for approximate rectangular parallel plate model of the MRF flow in annular gap of moving piston. Considering the velocity of walls, the velocity profile and pressure drop for Newtonian and non-Newtonian regions in the gap are determined as follows.
5.1. Velocity in Newtonian regions
Due to the quasi-static analysis, the inertia term in equation (8) is neglected and direct integration of the outcome results in

Applying boundary conditions of Table 1 for Newtonian regions, the velocity of the Newtonian fluid flow in parallel to the coil can be obtained as

so

5.2. Pressure drop in Newtonian regions
Equality of the volume flow rate through the gap with the volume flux displaced by the piston head gives

Then, pressure drop can be obtained easily as follows

where b = 2πRave,
5.3. Velocity in non-Newtonian (MR) region
Applying boundary conditions introduced in Table 1 for non-Newtonian (MR) regions, the velocity profile of MRF flow in parallel to flange in the piston gap can be determined as follows



5.4. Pressure drop in non-Newtonian regions
As the velocity is constant across the plug region, the velocity of MRF flow at boundaries of the plug region (region 2) should be equal

which leads to

On the other hand

Also, plug thickness can be obtained from the equilibrium equation of the plug flow as follows

The non-dimensional plug thickness is defined as follows

On the other hand, the total volume flow rate through the gap must be equal to volume flow rate which is displaced by the piston head
Substituting equations (49) to (51) into equation (57), using equations (53) to (56) and direct integration of the outcome leads to

Substituting equations (55) and (56) into the equation (58) and rewriting the result lead to the following equation for unknown, ΔP(t)MR

where


By solving equation (59), the pressure drop in MR regions is obtained. Then, damping force from quasi-static analysis can be obtained using the same method that is explained in previous section.
6. Results and discussion
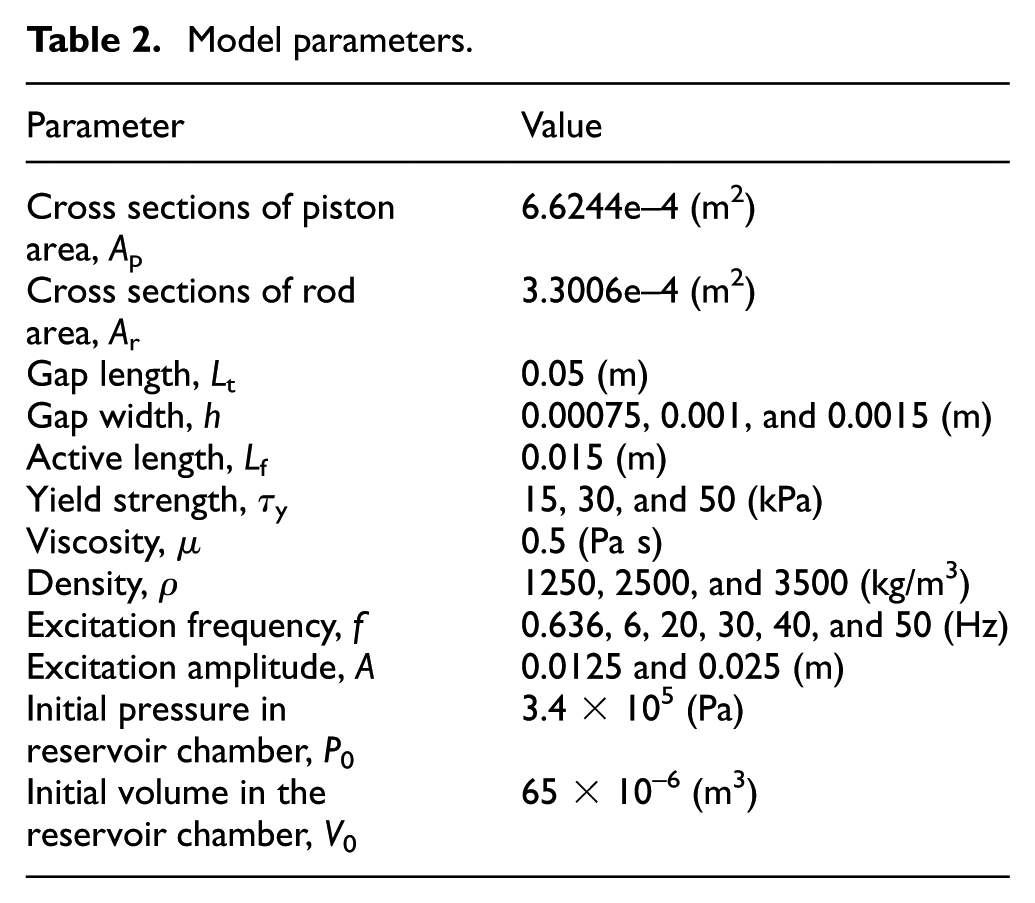
In this section, parametric investigation of twin tube MR dampers with annular gap inside the piston is performed based on a newly proposed unsteady analysis and the results are compared with developed quasi-static analysis. First, the analytical unsteady model is experimentally validated. Therefore, a twin tube MR damper with input current of 4 A is experimentally subjected to sinusoidal excitation with the amplitude of 0.025 m. This load is applied by an Instron dynamic and fatigue testing system (Series 8800, Four-Column Load Frame, single-phase power point, 230 V ± 10% at 50 Hz, maximum range of load cell: 2500 N), which is shown in Figure 5(a). The applied voltage is supplied from a DC voltage source and a current controller is implemented to provide current excitation of the damper coil. The prototype MR damper is shown in Figure 5(b) and its configuration parameters are listed in Table 2.
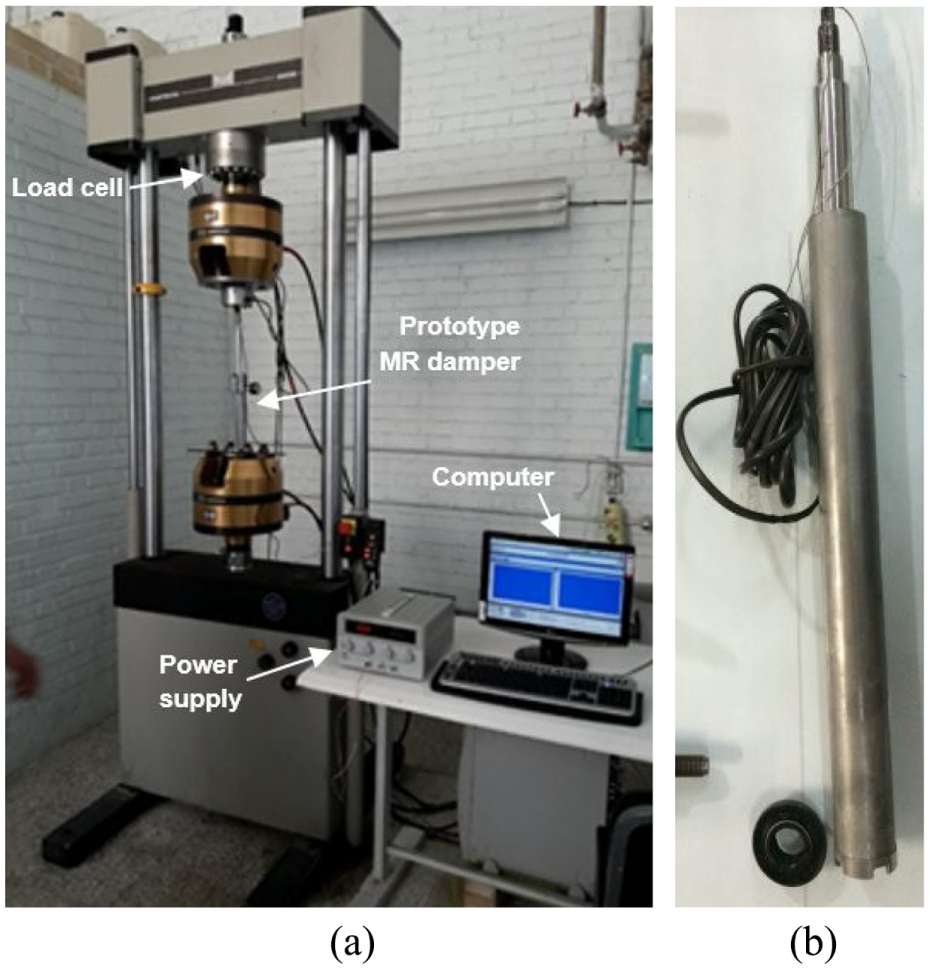
(a) Instron dynamic and fatigue testing system with the damper under test. (b) Prototype MR damper.
Model parameters.
Force–displacement hysteresis loops of MR damper from analytical model and experimental results are compared in Figure 6(a). The mean error between the experimental and analytical results is about 2.2% that may be due to the approximate modeling of the foot valves and polytrophic process assumption in reservoir chamber. Also, a comparison between present method and investigated method by Yu et al. (2013) for double-ended MR damper is shown in Figure 6(b). It is observed that the new unsteady model is in good agreement with the measured values and the results of investigated method by Yu et al. (2013).
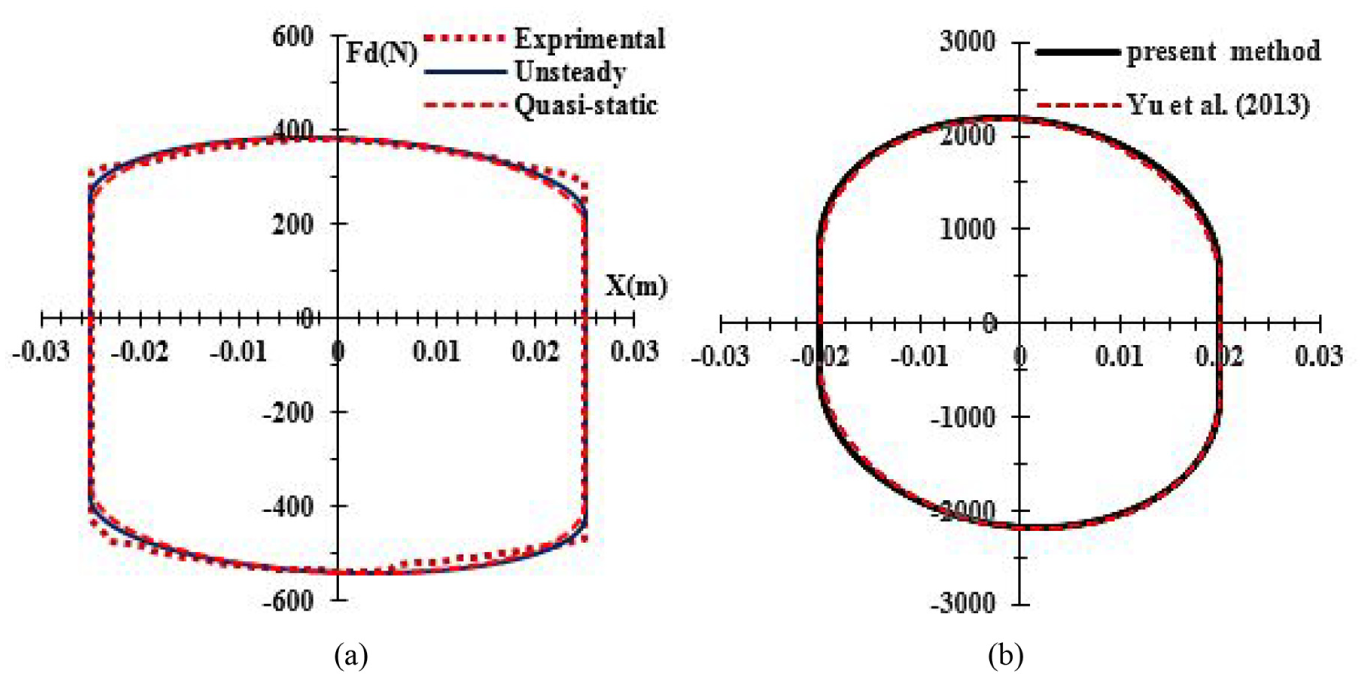
(a) Analytical and experimental force–displacement hysteresis loops for f = 0.636 Hz, ρ = 1250 kg/m3, τy = 15 kPa, h = 0.00075 m, A = 0.025 m. (b) Comparison between present method and results reported by Yu et al. (2013) for double-ended MR damper at f = 30 Hz, ρ = 2650 kg/m3&0x44;ÿτy = 20 kPa, h = 0.0015 m, A = 0.02 m.
6.1. Effect of frequency
6.1.1. Force–displacement and force–velocity diagrams
Force–displacement hysteresis loops of MR damper and also its damping force as a function of piston velocity are shown in Figures 7 and 8, respectively, for the frequency range of 0.636–50 Hz. It is clearly observable that the damping force is enhanced as the excitation frequency is increased. Also, one can infer from these figures that at low frequencies, the quasi-static analysis results and the new unsteady analysis results are in good agreement. But, by increasing the excitation frequency, the new unsteady analysis loops are deviated from the quasi-static analysis one. This deviation can be especially observed near the end of the storks where the fluid inertia is increased. For example, for f = 50 Hz, almost 180% error is included in quasi-static analysis results with respect to unsteady analysis results. It is due to the unsteady behavior of fluid flow via fluid inertia term influence on the momentum equation.
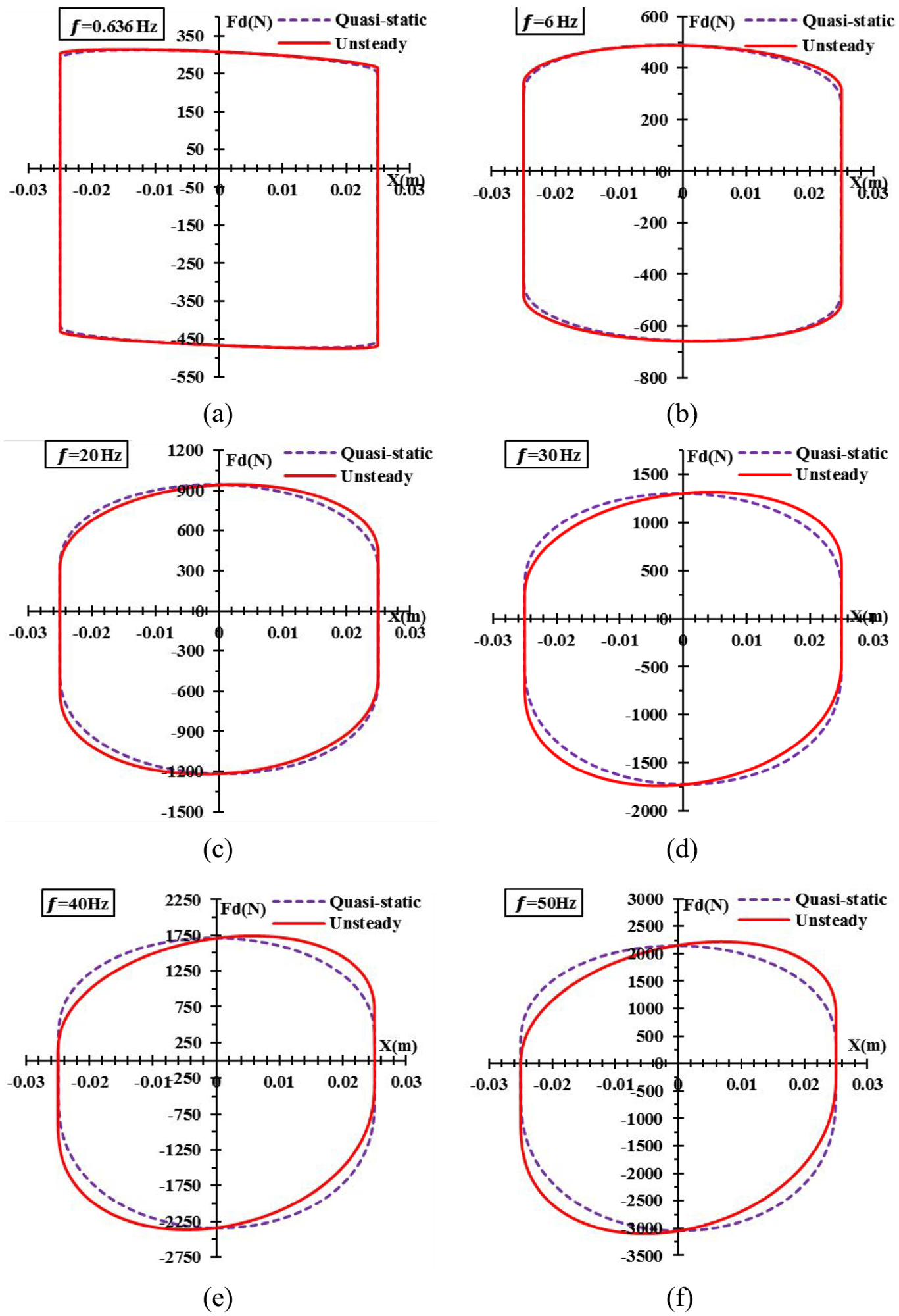
Force–displacement loops at (a) f = 0.636 Hz, (b) f = 6 Hz, (c) f = 20 Hz, (d) f = 30 Hz, (e) f = 40 Hz, and (f) f = 50 Hz (τy = 50 kPa; hg = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
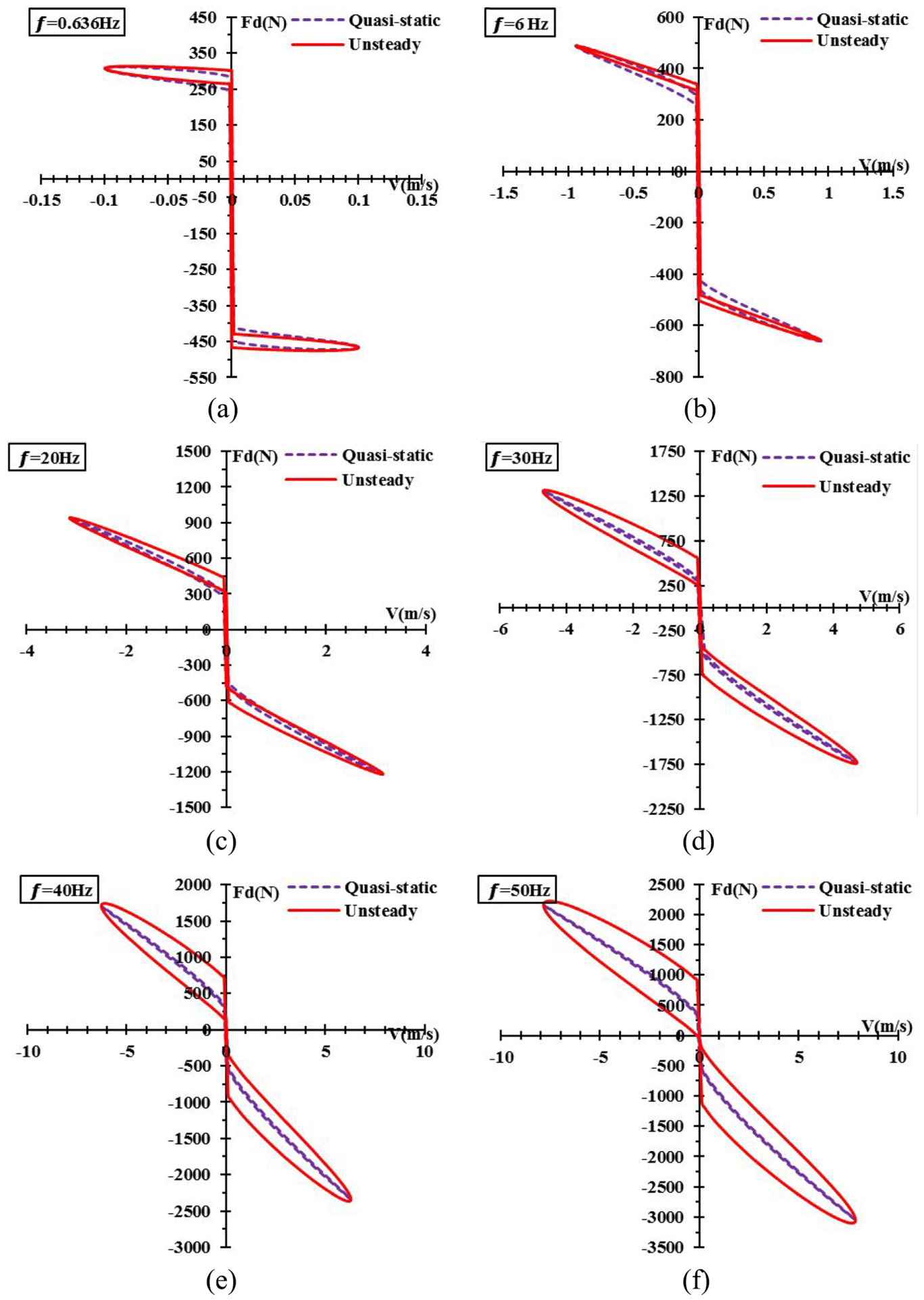
Force–velocity at (a) f = 0.636 Hz, (b) f = 6 Hz, (c) f = 20 Hz, (d) f = 30 Hz, (e) f = 40 Hz, and (f) f = 50 Hz (τy = 50 kPa; hg = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
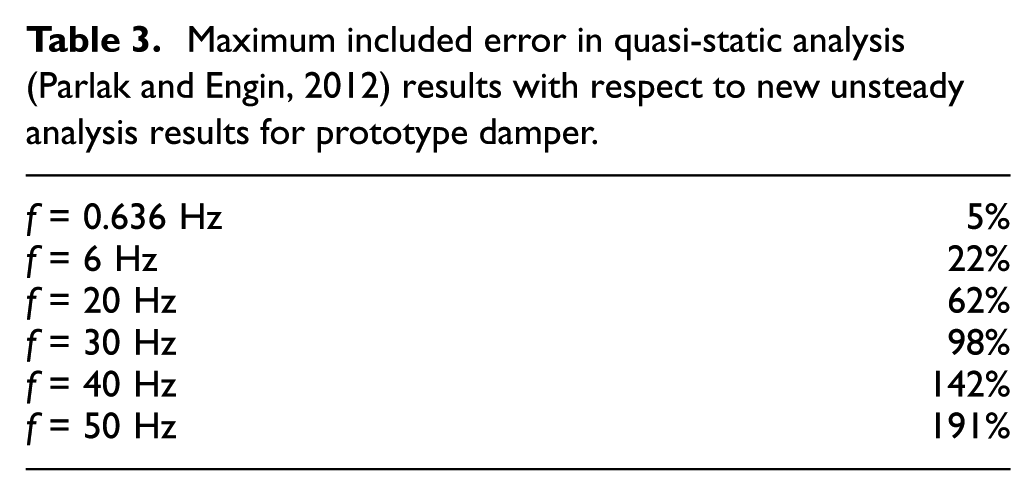
Also, maximum included error in quasi-static analysis results (Parlak and Engin, 2012) with respect to new unsteady analysis results for prototype damper at studied frequency range is given in Table 3. By increasing the excitation frequency, f, the inertia term increases significantly so error between quasi-static results and the present unsteady analysis is enhanced considerably. The errors between quasi-static results and the present unsteady analysis are due to neglecting the inertia term in quasi-static analysis.
Maximum included error in quasi-static analysis (Parlak and Engin, 2012) results with respect to new unsteady analysis results for prototype damper.
6.1.2. Phase difference between pressure drop and flow rate in gap
The variation of the phase difference between the total pressure drop and the flow rate can be predicted precisely, using the new unsteady analysis. It is a significant advantage of the new unsteady analysis rather than other unsteady (Chen et al., 2004; Nguyen and Choi, 2009; Yu et al., 2013) and quasi-static analyses (Ai et al., 2006; Brigley et al., 2007; Dimock et al., 2002; Ghaffari et al., 2014; Grunwald and Olabi, 2008; Hong et al., 2005, 2008; Kamath et al., 1996; Khan et al., 2014; Parlak and Engin, 2012; Phillips, 1969; Wang et al., 2009; Yang et al., 2002; Yoo and Wereley, 2005a, 2005b). This can be done by assuming velocity field, pressure gradient piston velocity and acceleration to be complex variables in the first step of the analysis. Therefore, as a result, the resultant pressure drop and flow rate should be complex values. Furthermore, the phase difference between the pressure drop and flow rate in all regions can be calculated using equation (62)
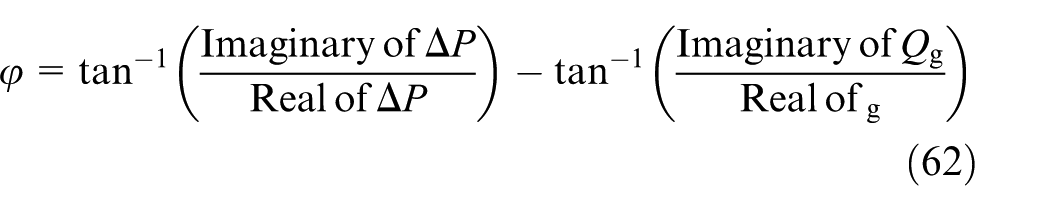
Based on this equation, time variation of the phase difference between pressure drop and flow rate for different values of the excitation frequency is shown in Figure 9. As shown in this figure, the phase difference between the Newtonian or viscous pressures drop and the flow rate,
Quasi-static condition

Unsteady condition

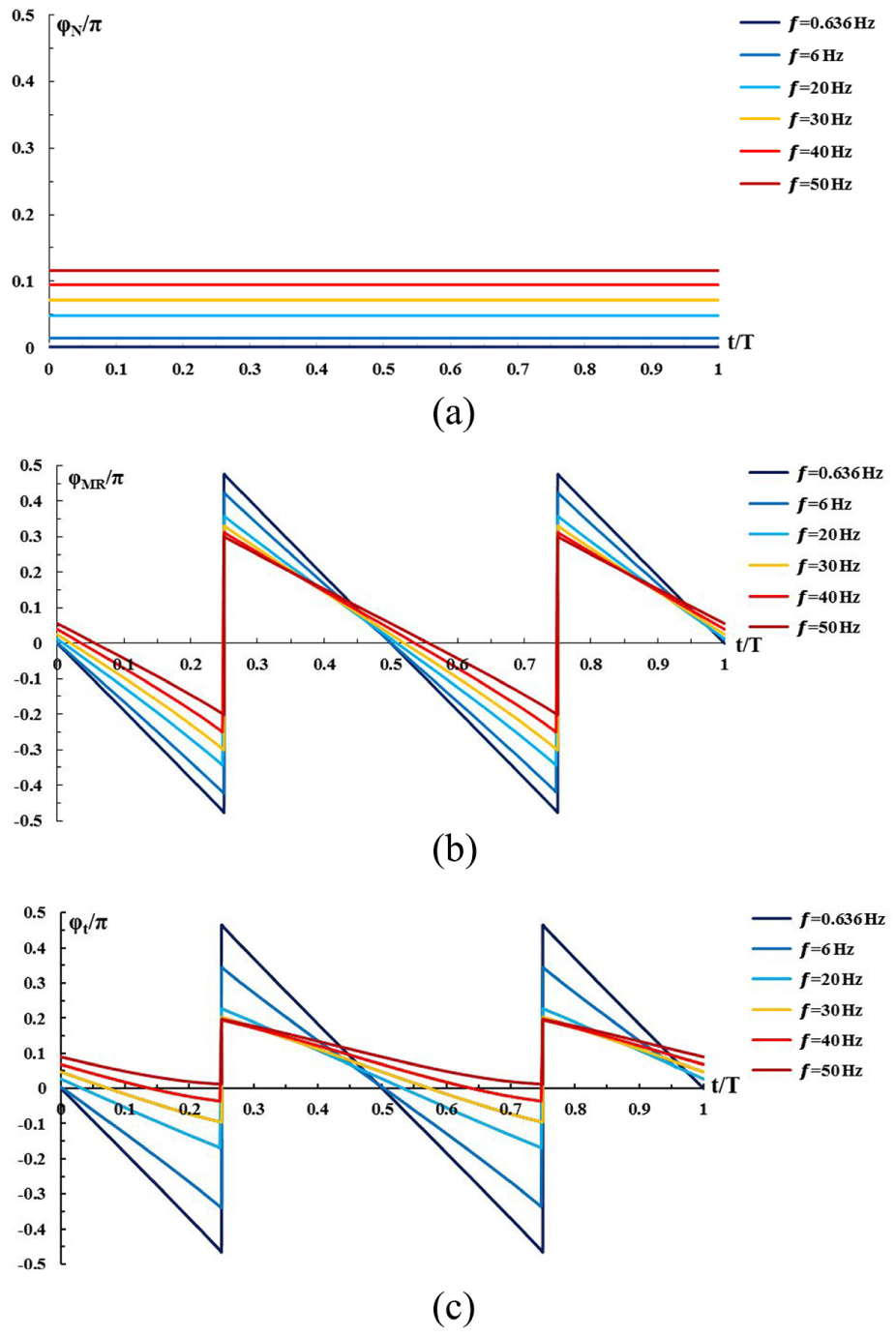
Phase difference between flow rate and pressure in (a) Newtonian regions of (b) non-Newtonian (MR) regions of gap, and (c) all regions of gap at different frequencies (τy = 50 kPa; h = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
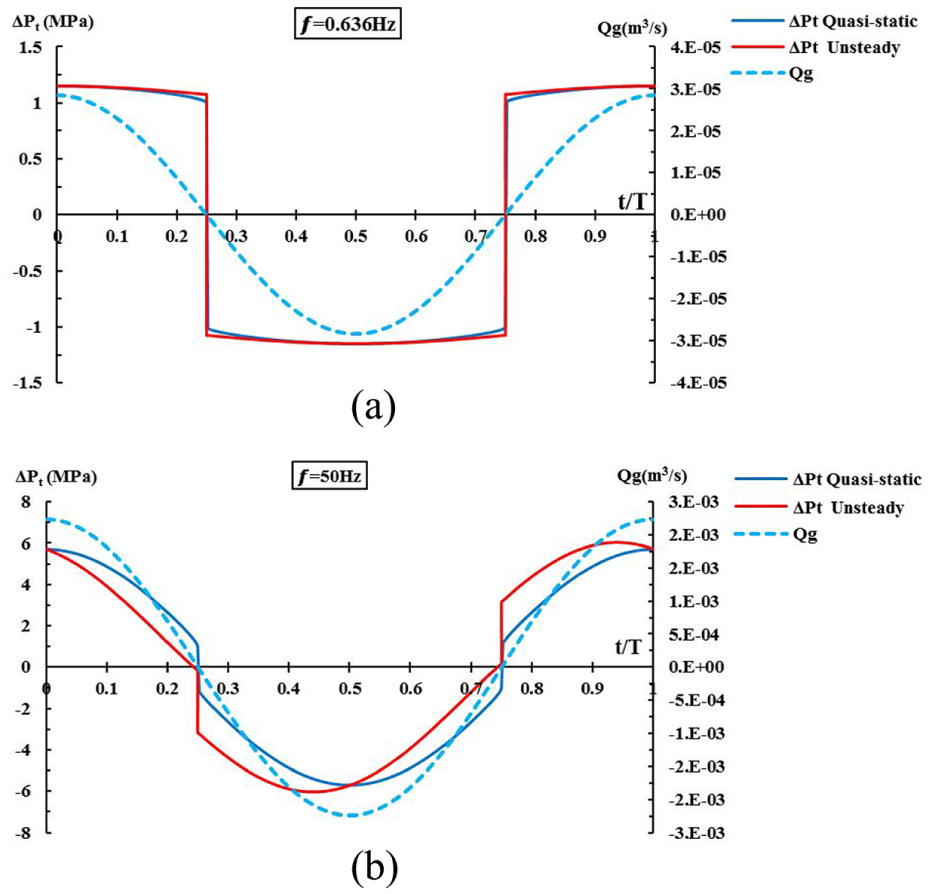
Time variation of flow rate and total pressure drop of gap (τy = 50 kPa; h = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
It can be inferred from these equations that in unsteady analysis, pressure gradient (pressure drop) is caused by shear stress and inertia term of fluid flow. Where, shear stress term is due to the viscosity and yield stress effects on the flow field. To investigate the effect of the inertia term on the phase difference between the pressure drop and the flow rate, first, quasi-static analysis of Newtonian fluid flow is considered. Equations (47) and (48) can be rewritten as follows


According to equations (65) and (66), both the flow rate and the pressure drop are proportional to the cos(ωt) so there are in phase. According to equation (63), pressure drop caused by inertia term is neglected in quasi-static analysis. In the other word, in quasi-static analysis of Newtonian fluid flow, the total pressure drop just consists of the viscous pressure drop that is proportional to the flow rate.
In the unsteady analysis of Newtonian fluid flow, according to equation (64), in addition to viscous shear stress, inertia term is incorporated into the governing equation too. Hence, pressure drop consists of acceleration pressure drop in addition to viscous pressure drop that is proportional to flow rate. It causes phase difference between the total pressure drop and the flow rate, as it can be inferred from Figure 9(a). According to this figure, as the frequency increases, the phase difference due to the acceleration pressure drop is increased. Also, equations (23) to (27) and (32) can be rewritten as equations (67) to (69)



According to these equations, in unsteady analysis, phase difference between the pressure drop and the flow rate,
6.1.3. Velocity profile of MRF flow
The velocity profile of the MRF flow inactive regions at t = T/8 is depicted in Figure 11(a). As shown in this figure, the higher the frequency, the larger the velocity magnitude. Also, the difference between the quasi-static and unsteady velocity profiles is clearly observed especially at higher frequencies. As the frequency increases, the post-yield regions are more developed in which the shear stress exceeds the yield stress. Also, by increasing the excitation frequency, the thickness of the plug flow region, where the shear stress is less than the yield stress, is decreased as it is illustrated in Figure 11(a). Consequently, as the frequency is increased, the MR damper working domain is more developed into the post-yield regions. The maximum deviation between the quasi-static and unsteady velocity profile is obtained in core region, where the inertia term is higher rather than near the walls, as it is observed in Figure 11(b).
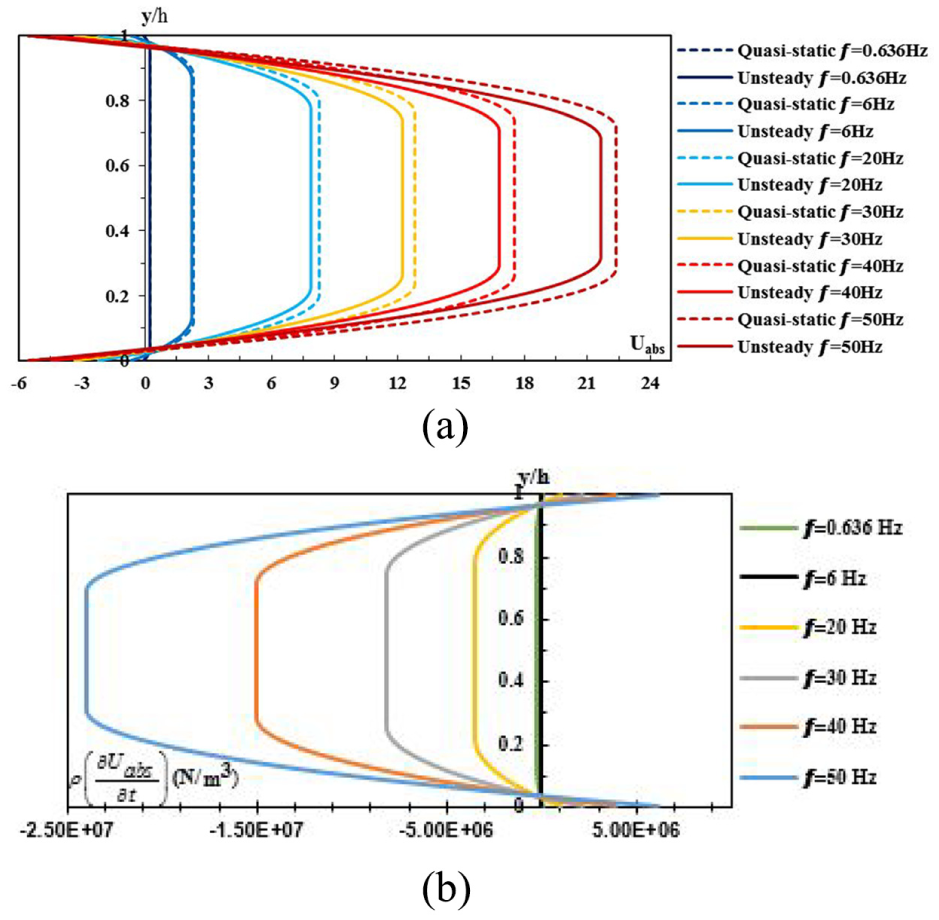
(a) Velocity profiles and (b) inertia term in MR regions for t = T/8 (τy = 50 kPa; h = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
6.1.4. Variation of plug thickness with time
Plug thickness can be obtained from unsteady and quasi-static analysis using equations (34) and (53). As it is shown in Figures 11 and 12, for both unsteady and quasi-static analysis, plug thickness and non-dimensional plug thickness are decreased as the frequency is increased. Also, one can infer from these figures that unsteady plug thickness is smaller than quasi-static one, especially at higher frequencies. It is caused by the effect of inertia term in equation (34), which is neglected in quasi-static analysis (equation (55)). On the other hand, as it is observed in Figure 12(a), this deference is increased near the end of storks, where the inertia increases. The variation of inertia term of the plug region, with position of the piston, X(m) and frequency is shown in Figure 12(b). As it can be inferred from this figure, maximum inertia term magnitudes are near the end of the strokes, where the maximum error between the quasi-static and unsteady method results is obtained.
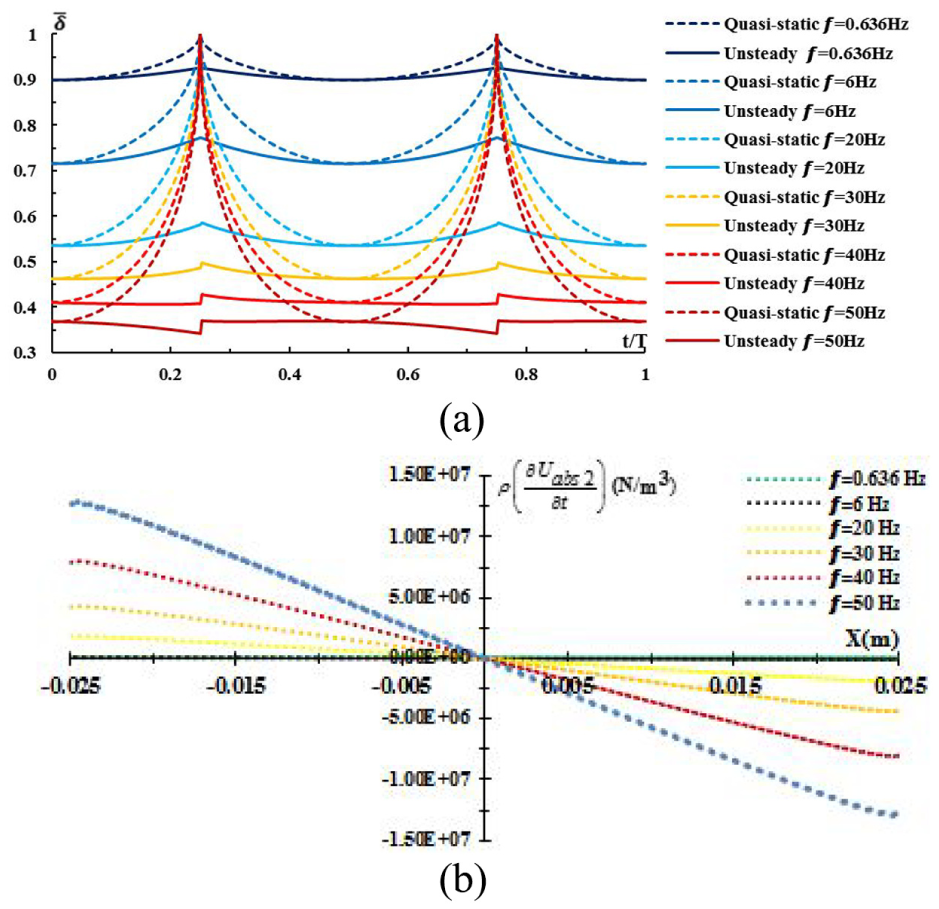
Variation of (a) non-dimensional plug thickness with time at different frequencies, (b) inertia term of the plug region, with position of the piston, X(m) and frequency (τy = 50 kPa; h = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
6.2. Effect of yield stress
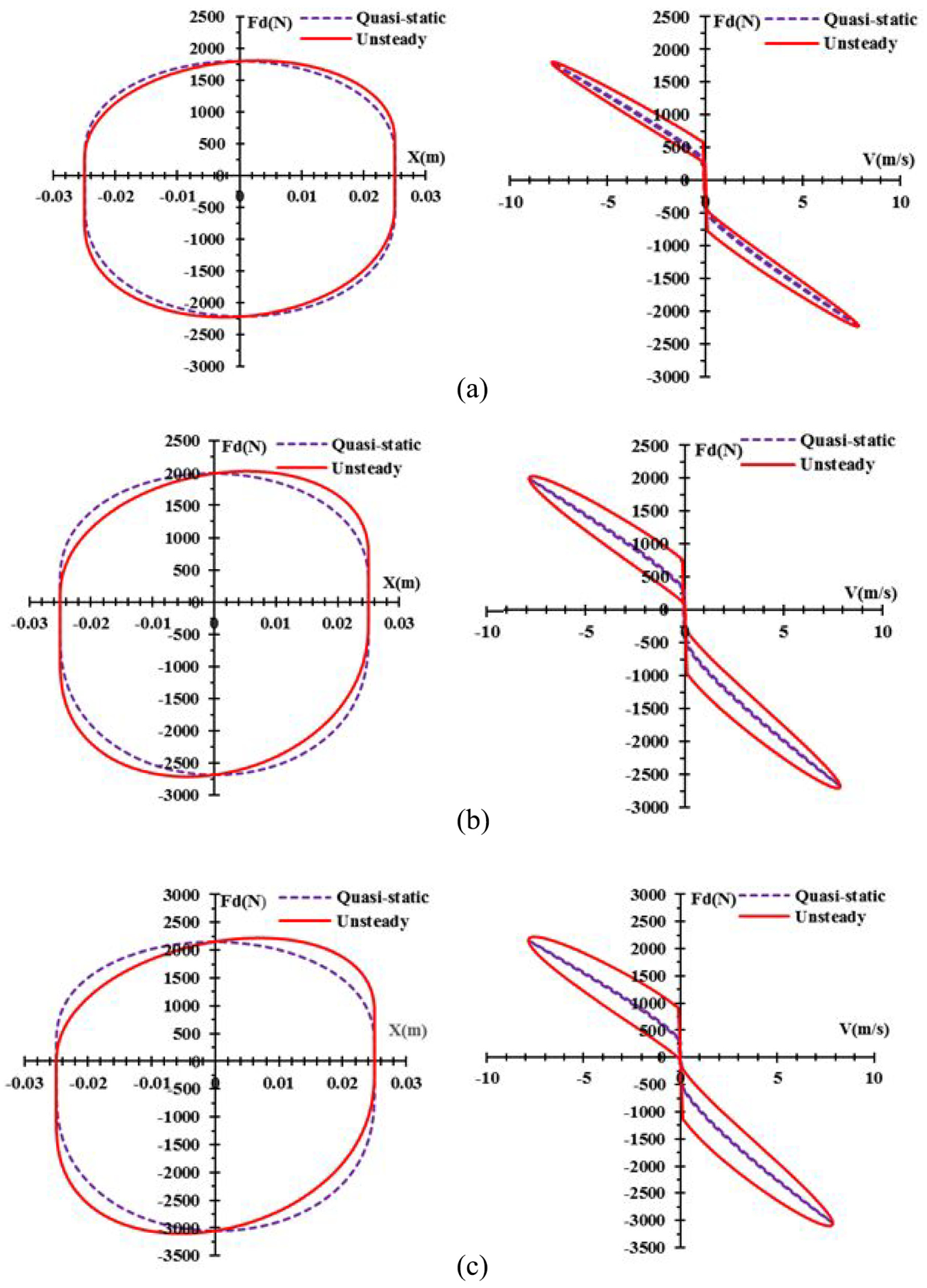
Damping force of the twin tube MR damper as a function of piston displacement and piston velocity is shown in Figure 13 for different yield stresses (15, 30, and 50 kPa). It is inferred from this figure that in larger yield stresses, the damping force is enhanced. It is also observed that the effect of fluid inertia and unsteady behavior of MRF flow are increased as the yield stress is decreased.
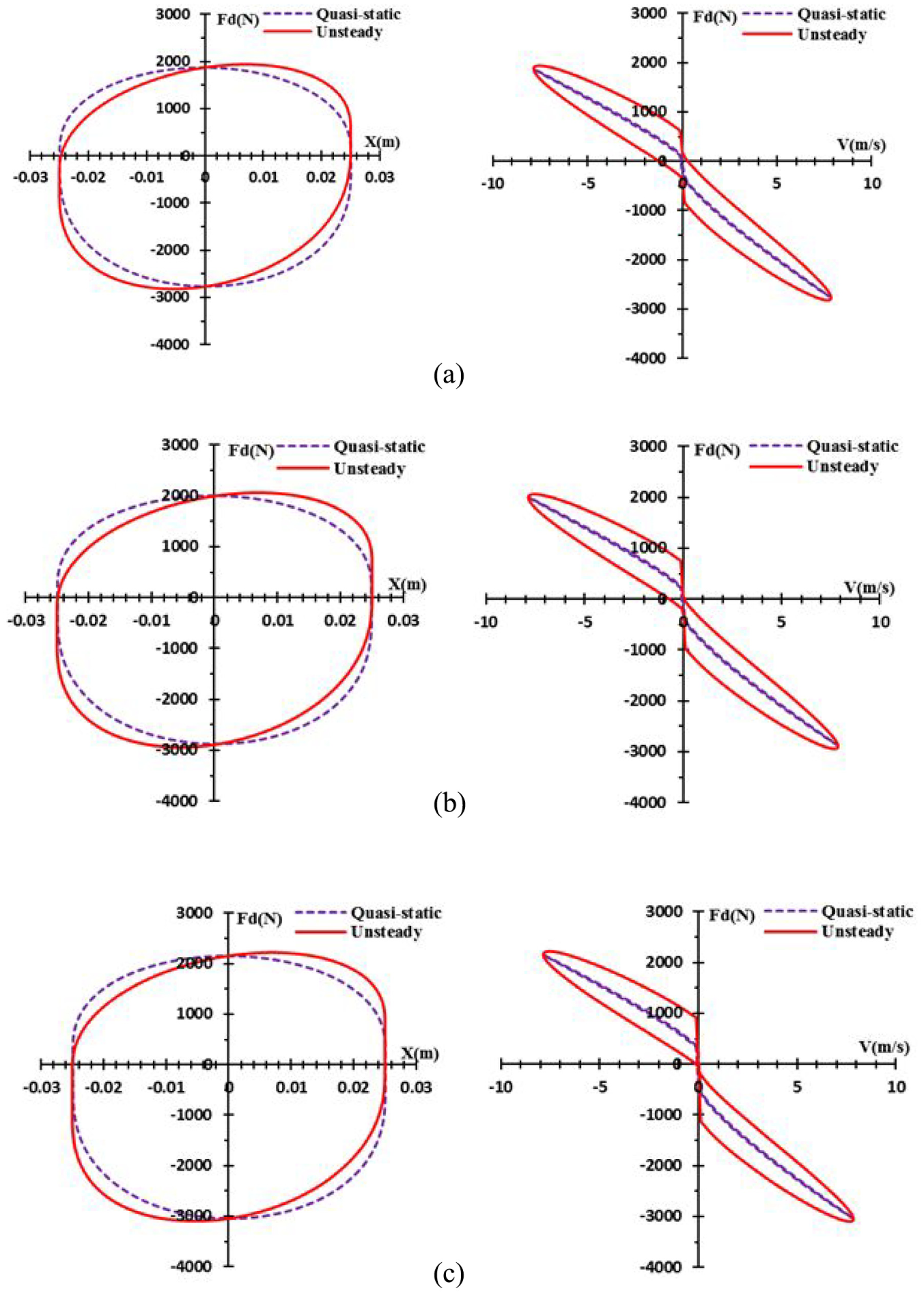
Force–displacement and force–velocity loops at (a) τy = 15 kPa, (b) τy = 30 kPa, and (c) τy = 50 kPa (h = 0.0015 m; ρ = 3500 kg/m3; A = 0.025 m).
6.3. Effect of density
Figure 14 illustrates the effects of density of MRF on damping force, hysteresis dissipation, and characteristic loops of twin tube MR dampers. It can be seen that higher density results in higher dampening. On the other hand, as the density is increased, the effect of the unsteady behavior due to the MRF inertia on hysteresis dissipation and characteristic loops is increased and the deviation of unsteady behavior with respect to quasi-static one is also increased so unsteady behavior of dense MRFs is more significant.
Force–displacement and force–velocity loops at (a) ρ = 1250 kg/m3, (b) ρ = 2500 kg/m3, and (c) ρ = 3500 kg/m3 (f = 50 Hz; h = 0.0015 m; τy = 50 kPa; A = 0.025 m).
6.4. Effect of gap height
The effects of gap height on damping force and unsteady behavior of the twin tube MR damper are shown in Figure 15. It is shown that as the gap height is decreased, the damping force is significantly increased and as a result, the difference between the quasi-static and unsteady analysis is increased.
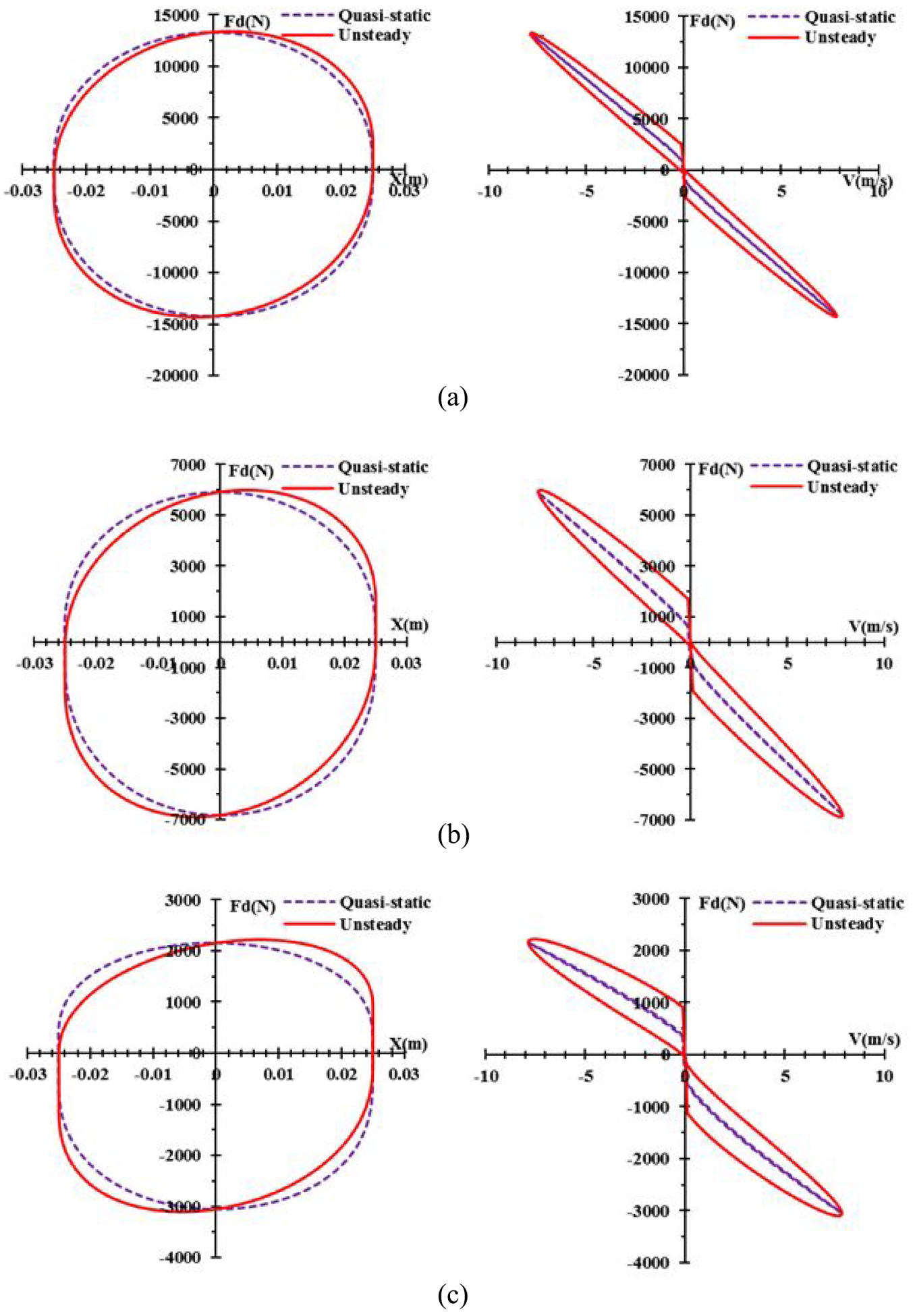
Force–displacement and force–velocity loops for (a) h = 0.0075 m, (b) h = 0.001 m, and (c) h = 0.0015 m (f = 50 Hz; ρ = 3500 kg/m3; τy = 50 kPa; A = 0.025 m).
6.5. Effect of oscillation amplitude
Damping force of the twin tube damper is affected by oscillation amplitude. The effect of oscillation amplitude on damping force, hysteresis dissipation, and unsteady behavior of the twin tube MR damper due to MRF inertia are depicted in Figure 16. It is obviously shown that the damping force and unsteady behavior of MRF are enhanced by increasing the oscillation amplitude. Furthermore, as the amplitude is increased, the maximum error of quasi-static behavior with respect to unsteady behavior is increased from 80% to 180%. As a result, one can deduce that as the amplitude increases, the effect of fluid inertia is increased.
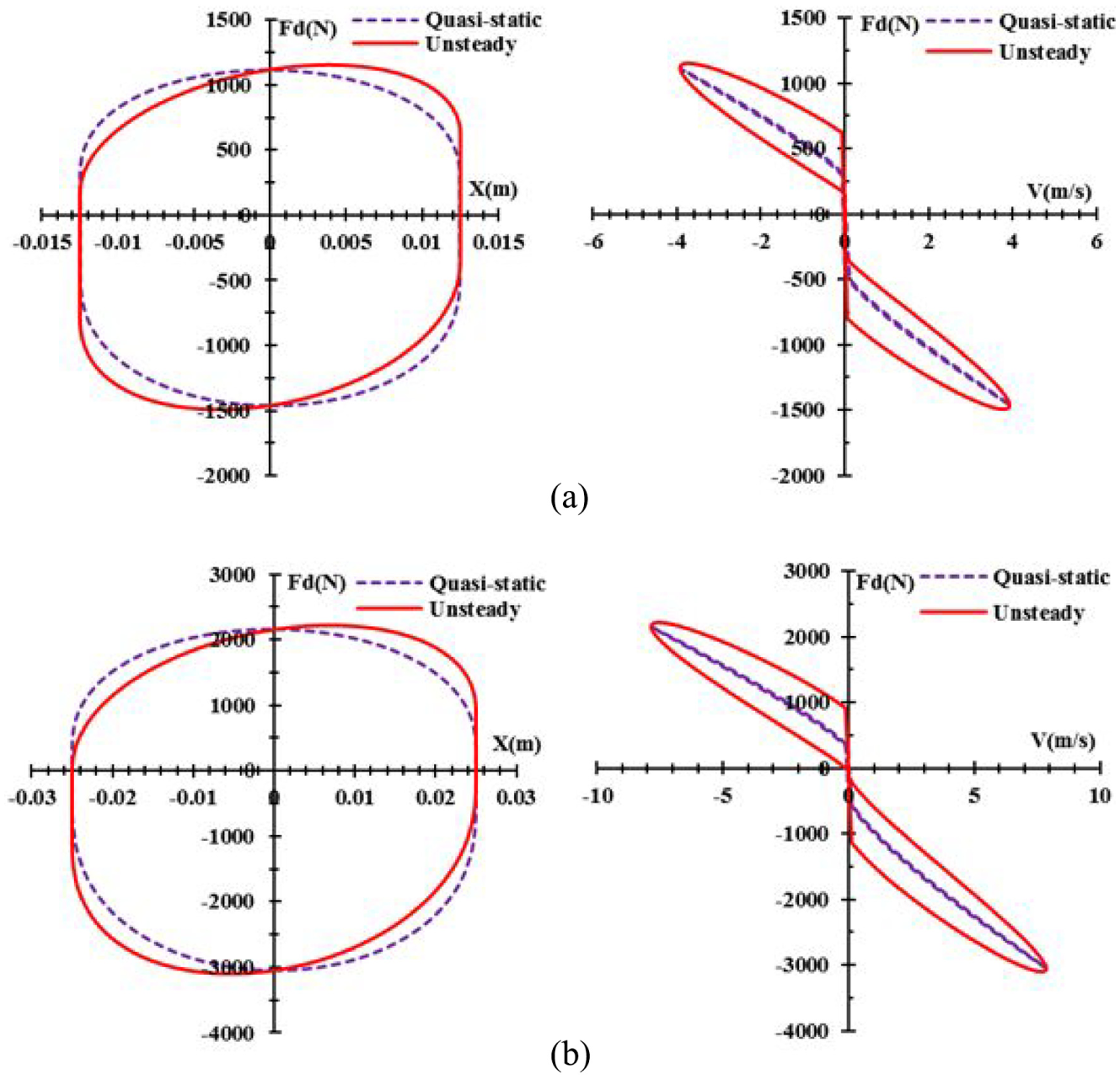
Force–displacement and force–velocity loops for (a) A = 0.0125 m and (b) A = 0.025 m (f = 50 Hz; ρ = 3500 kg/m3; τy = 50 kPa; h = 0.0015 m).
7. Conclusion
In this study, a new unsteady analysis based on Stokes’ second problem (Stokes, 1851) is developed for Bingham MRF flow through the annular gap which is opened on the piston head of twin tube MR damper. A quasi-static analysis is also developed for Bingham MRF flow through the annular gap inside the moving piston head.
According to the obtained results, as the excitation frequency, displacement amplitude, MRF density, and gap height are increased, the effects of MRF inertia on force–displacement and force–velocity loops are also increased and so, the deviation between the quasi-static analysis and the new unsteady analysis is increased. Furthermore, as the yield stress decreases, the effect of MRF inertia is increased. It can be inferred that at high frequencies, displacement amplitude and gap height have more effect on maximum damping force than the yield stress and density of MRF. A significant advantage of the new unsteady analysis with respect to other unsteady and quasi-static analyses is that the phase difference between pressure drop and flow rate along the gap can be easily calculated. In contrast with the quasi-static analysis which neglects the inertia term and so fails to predict the phase difference between the total pressure drop and the flow rate, the new unsteady analysis precisely predicts this phenomenon for higher frequencies.
Obtained results show that at lower frequencies, total phase difference value
Furthermore, the results show that due to the effect of inertia term which is neglected in quasi-static analysis, the unsteady plug thickness is smaller than quasi-static one especially at higher frequencies and near the end of the strokes. Finally, the new unsteady analysis precisely predicts unsteady behavior of MRF flow and damper operation under unsteady state. Therefore, the authors believe that the new unsteady analysis can be used for design of MR devices instead of treating the more complex and expensive CFD simulations and experimental observations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.