
Abstract
Today, the human being endeavors to manufacture devices and materials capable of doing something in an intelligent way. Shape memory polymers are a series of smart materials, capable of retrieving their original shape from a temporary form by applying external stimuli, for example, heat, electricity, magnetism, light, pH, and humidity. In this research, the behavior of temperature-sensitive shape memory polymer–based structures with positive and negative Poisson’s ratio has been analyzed. The purpose is the material design of smart structures with tunable Poisson’s ratio using topology optimization. In this study, a meta-structure is designed, which is made by a smart material. Not only does this structure have shape memory effects, but also it has negative Poisson’s ratio, which can be used in new sensors, actuators, and biomedical applications. After creation of the unit cell and the representative volume element and formation of final three-dimensional structure, finite element modeling is conducted based on a thermo-visco-hyperelastic constitutive model at large deformations. Examining the behavior of structures in tensile pre-strains of 20%, 10%, and 5%, it is observed that pre-strain has no considerable effect on Poisson’s ratio, but under compressive strain of 20%, it is concluded that the type of loading is effective on Poisson’s ratio and the results are different in tension and compression modes. Finally, the influence of temperature rate on the behavior of structures is inspected, and it is concluded that the more slowly the temperature changes, the more strain or shape recovery is accomplished at a specific temperature.
Keywords
1. Introduction
Shape memory polymers (SMPs) are a type of smart materials capable of recovering their original shape from a temporary shape under application of external stimuli, for example, heat, magnetic, electricity, pH, light, and moisture (Baniasadi et al., 2020; Hager et al., 2015; Meng and Li, 2013; Momeni et al., 2017; Xie et al., 2016). Low weight, low cost, high deformability, controllable recovery, biocompatibility, and biodegradability are advantages of SMPs over metallic shape memory materials (Ansari et al., 2019; Li and Wang, 2011; Liu et al., 2007; Roudbarian et al., 2019). On the contrary, pure SMPs have low deformation stiffness and low recovery stress. To overcome these limitations required in some applications, the study of shape memory polymer composite (SMPC) has attracted a great deal of interest (Abbasi-Shirsavar et al., 2019; Gall et al., 2000; Tandon et al., 2010; Yarali et al., 2019). After the introduction of polynorbornene as a smart polymer by CDF Chimie Company in France in 1984, these materials were the subject of many studies (Ratna and Karger-Kocsis, 2008). Tobushi et al. (1996) conducted researches on the shape fixity and recovery behavior of SMPs. They performed uniaxial experiments on polyurethane material. In 1997, based on experimental observations, Tobushi et al. presented a one-dimensional linear viscoelastic constitutive model in small strains. Also, for the first time, the concept of stored strain was introduced and used in modeling (Tobushi et al., 1997). In 2001, they proposed a nonlinear viscoelastic model based on their previous model, suitable for large deformations (Tobushi et al., 2001).
Liu et al. (2006) proposed a constitutive model through the introduction of some phenomenological concepts, that is, phase transition and stored strain for SMPs in 2006. It is one of the basic models in the constitutive modeling of SMPs so that several models presented after have their basics borrowed from Liu et al. (2006) model. Ghosh and Srinivasa (2011) developed a model for small strains in 2011, in which SMP is assumed to consist of a permanent and a temporary network. The permanent network is responsible for shape memory effect (SME) and retrieval properties, while the temporary network is responsible for shape fixation. Employing the thermodynamics of irreversible processes, Baghani et al. (2012) developed a three-dimensional (3D) constitutive model based on the Liu et al. model in small and large deformations. Taking into account Maxwell’s generalized model, Diani et al. (2012) presented a thermo-visco-hyperelastic model at large deformations, which by performing dynamic mechanical analysis (DMA), the coefficients and parameters of epoxy material were identified. In a similar work, Arrieta et al. (2014), proposed a 3D constitutive model to determine the response of SMPs at large deformations, which has some advantages over the other models presented so far that can accurately predict the behavior of SMPs in strain recovery (free recovery or shape recovery) as well as stress recovery (force recovery or constraint recovery).
Metamaterials are artificial and engineered structures with unique properties beyond natural materials which are used in myriad applications; these properties are due to structure and not a material composition (Ahmadivand et al., 2016; Chen et al., 2016; Nouh et al., 2016; Selimis and Farsari, 2017). They are usually arranged in repeating patterns and made from assemblies of multiple elements and materials like polymers and metals. They are extensively employed in the design of broadband light bending (Ni et al., 2012), sensors (Liu et al., 2012), and switches (Zheludev and Kivshar, 2012). Auxetics are structures with a negative Poisson’s ratio (NPR), that is, when stretched, they become thicker, and when compressed, they become thinner in the direction perpendicular to the applied force. They may have unique industrial applications, such as new sealants and cushions (Hassan et al., 2009; Tanaka et al., 2001; Wang et al., 2015; Xu and Li, 2011). Planar auxetic structures have the potential to influence a wide range of applications. Rossiter et al. (2014) showed that an SMP auxetic hexachiral two-dimensional (2D) structure could be tailored to prepare a tunable stiffness behavior in its fully deployed state by changing the angle of inter-hub connections. In another work, Jacobs et al. (2012) described the design and manufacturing of a deployable antenna for deep-space missions based on hybrid honeycomb truss made of a shape memory alloy (SMA). The deployable characteristics were enhanced by the equivalent auxetic behavior of the cellular configuration. Scarpa et al. (2003) illustrated various dynamic features of open cell compliant polyurethane foam with an auxetic behavior. Foam samples had been tested in a viscoelastic analyzer tensile test machine to determine Young’s modulus and loss factor for small dynamic strains. Shim et al. (2013) designed a class of 2D soft auxetic metamaterials whose architecture could be changed in response to an external stimulus. Clausen et al. (2015) worked on topology optimized architectures with programmable Poisson’s ratio over large deformations to design their structure with 3D printing and in order to fabricate the designs and validate the numerical behavior. They created architected materials with programmable Poisson’s ratios between negative and positive ranges over large deformations of up to 20% or more.
Since Bendsøe and Kikuchi introduced a general computational material distribution method, topology optimization has been growing both in academic research and industrial applications (Bendsøe, 1989; Bendsøe et al., 1988; Bendsøe and Sigmund, 1999). Over the past decade, several similar plans with slightly different attributes have been developed in the field of topology optimization. These attributes include density-based methods (Bendsøe, 1989; Zhou and Rozvany, 1991), evolutionary procedures (Huang and Xie, 2009; Xie and Steven, 1993; Zhu et al., 2007), and level set methods (Allaire et al., 2004; Sethian and Wiegmann, 2000; Wang et al., 2003), which their goal is to find optimal structural topologies or to optimize the layout of the material under the constraints and boundary conditions (BCs). Bendsøe (2003) presented a density-based method that was associated with simplification assumptions and known as the solid isotropic material with penalization (SIMP) method.
In this study, we present a numerical investigation on smart auxetic 3D meta-structures made from SMPs, constructed through topology optimization and the SIMP method. In section 1, an introduction to SMPs and the relevant literature review was presented. The modeling, which involves SMP constitutive equations, is described in section 2. Geometrical modeling along with topology optimization is discussed in section 3. In section 4, details of the finite element analysis (FEA) are reported. Results and discussion in section 5 include comparing positive Poisson’s ratio (PPR) and NPR structures, the effect of pre-strains, loading type, and temperature rate on NPR structure. Finally, in section 6, a summary is given, and some concluding remarks are presented.
2. A brief review of SMP constitutive equations
A typical programming path of an SMP material is shown in Figure 1, which consists of four steps: (1) loading at above the glass transition temperature
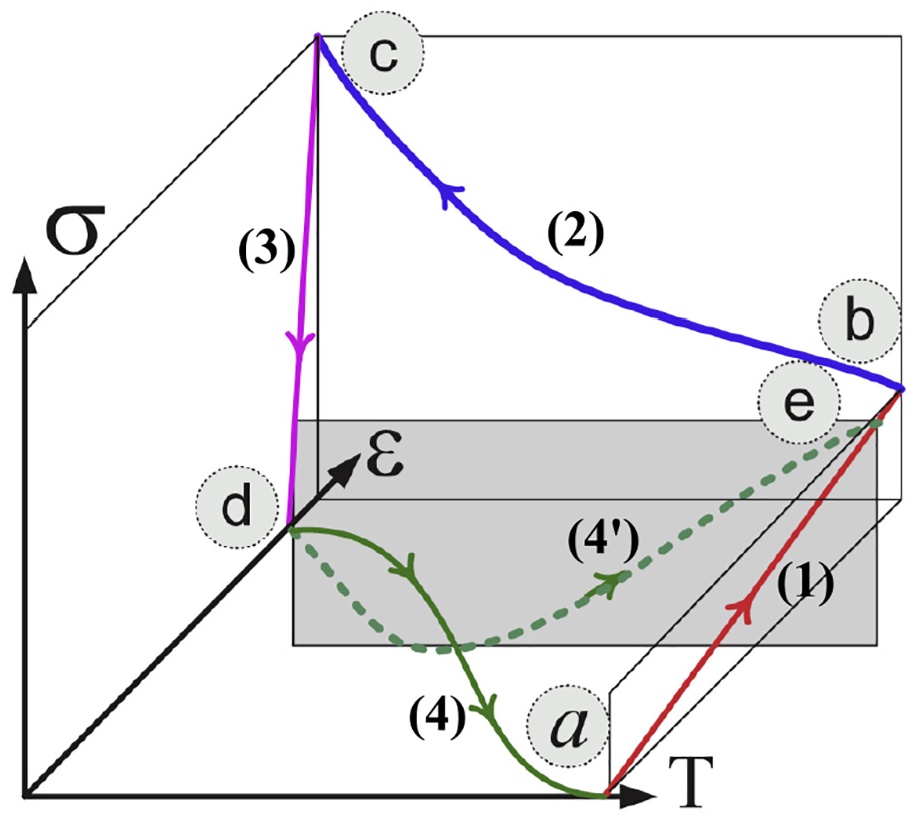
Stress–strain–temperature diagram depicting the thermomechanical behavior of SMP in strain and stress recovery conditions.
Commonly, there are two approaches for modeling SMPs: (1) viscoelasticity-based approach, for example, Tobushi et al. (2001) and Diani et al. (2012) models; (2) phase transition approach, for example, Liu et al. (2006) and Baghani et al. (2012) models. In this study, we employ the thermo-visco-hyperelastic model proposed by Arrieta et al. (2014) for SMPs at large deformations, which is successful in the reproduction of both the strain and stress recovery stages. This model contains three main parts: viscoelastic, hyperelastic, and thermal branches, as illustrated in Figure 2.
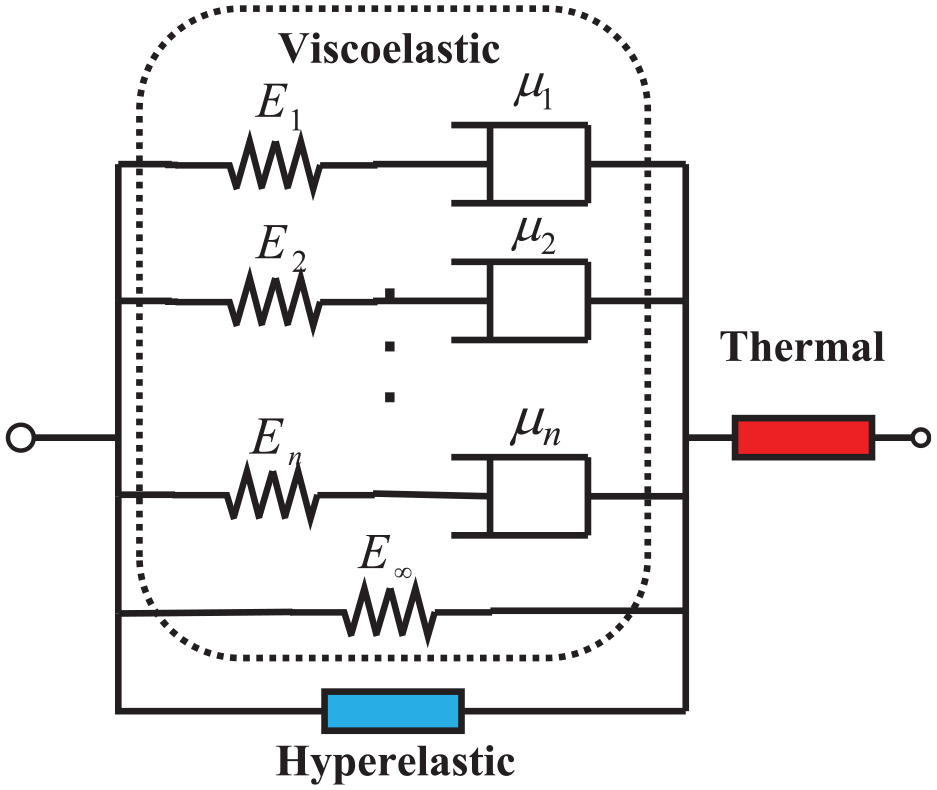
Schematic representation of the rheological constitutive model proposed by Arrieta et al. (2014) for SMPs.
As has already been stated, the total deformation gradient tensor

where

where
The viscoelastic part is assumed as the Maxwell–Wiechert model (Brinson and Brinson, 2008), also known as the generalized Maxwell model. The general form of the constitutive equations and the stress–strain relation is given as

where


in which

where



so that
For the hyperelastic part, which is strain-dependent and plays a significant role in large deformations, we consider Neo-Hookean strain energy function, which can be written as

where

so that dev expresses the deviatoric part of the argument, and
For the thermal part of the model, considering an isothermal process, thermal part of the deformation gradient tensor can be written as
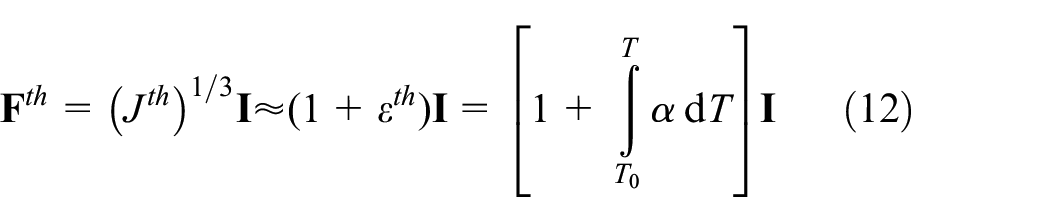
where
Thermo-visco-hyperelastic material parameters for the proposed SMP network adopted from Arrieta et al. (2014).
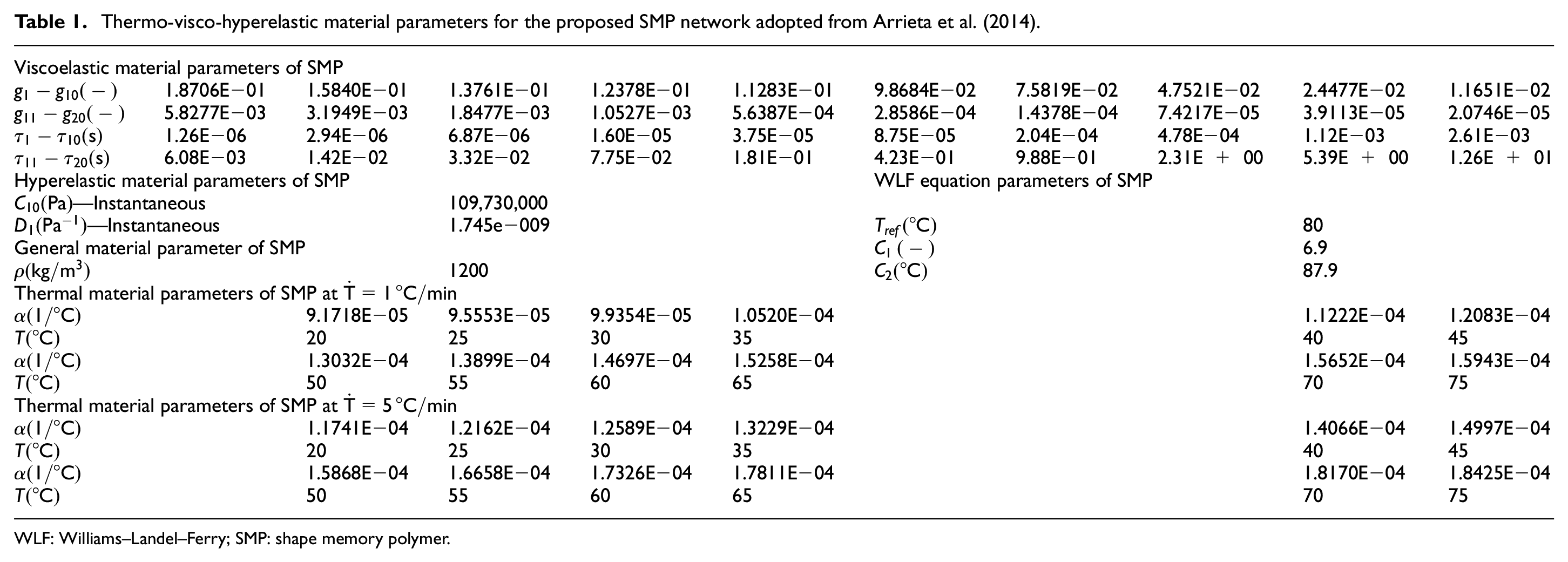
WLF: Williams–Landel–Ferry; SMP: shape memory polymer.
Now, to consider time and temperature dependency for non-isothermal processes in an SME path, we may use the time-temperature superposition principle (TTSP). In other words, changing in time scale, the effects of temperature variation can be taken into account. In order to compute the total stress, we can write

so that


in which
To model the problem, we need to optimize the topology, construct the representative volume element (RVE), derive constitutive equations, and simulate it via FEA. The SMP examined in this study is an acrylate polymer network composition, which includes 90% molar mass of benzyl methacrylate (BMA) with 10% molar mass of poly(ethylene glycol) dimethacrylate (PEGDMA), and the glass transition temperature of this polymer network is
3. Geometrical modeling of an RVE
Currently, one of the most widely used techniques for topology optimization based on the finite element method is the SIMP method with optimality criteria algorithm (OCA), developed in the late 1980s. For the use of the SIMP-OCA method in the field of material design, the density of each element

So far, for structures made of history-dependent materials, such as SMPs, topology optimization has not been carried out, since these categories of materials are structurally related to the loading path and thus practically cannot be optimized uniquely. Therefore, in this work, an appropriate approximation is employed to simplify the relations to achieve an approximate optimized geometry and topology. It is considered that the material behaves almost linearly in the loading step. The basis of the relationships, coding, and the creation of the topology in this research is based on Andreassen et al. (2014), Moshki et al. (2018), Sigmund (2007) to develop RVEs. Unit cells are generated using a MATLAB code. The problem-solving algorithm in this section consists of four main steps: (1) obtaining the stiffness matrix of each unit element using FEA, (2) homogenizing based on asymptotic method to get the effective elasticity matrix, (3) optimizing the topology using the SIMP method based on minimizing the function of elasticity matrix arrays, and (4) filtering the results and determining the structure. The asymptotic homogenization theory is implemented to determine the effective elasticity tensor of the optimized RVEs. The theory of asymptotic homogenization makes it possible to predict the effective properties of the periodic microstructures using FEA of the periodic unit cell. In fact, the obtained elasticity tensor of the optimized RVEs can be generalized to the overall properties due to applying the double-scale asymptotic expansion and adopting the assumption of periodicity. Therefore, the elasticity tensor of the periodic unit cell is similar to the elasticity tensor of the stacked microstructure for the periodic unit cell (Hassani et al., 1998a, 1998b). It is noteworthy to say that the applied filtration scheme produces efficient mesh-independent designs. In other words, the filtering approach eliminates the problem of mesh dependency for the optimized RVE (Sigmund, 1994; Sigmund and Petersson, 1998). Eventually, to decrease the computational cost in the current research, the minimum allowable size of the samples has been used for the topology optimization process and construction of the unit cell. In this work, Poisson’s ratio is chosen as the target function. The constraint is the volume fraction of the structure, and the BCs are considered periodically. The flowchart in Figure 3 depicts a rational explanation of the steps involved. For more details on the SIMP-OCA method, one may refer to Bendsøe (2003), Sigmund (2001), and Xia et al. (2015).
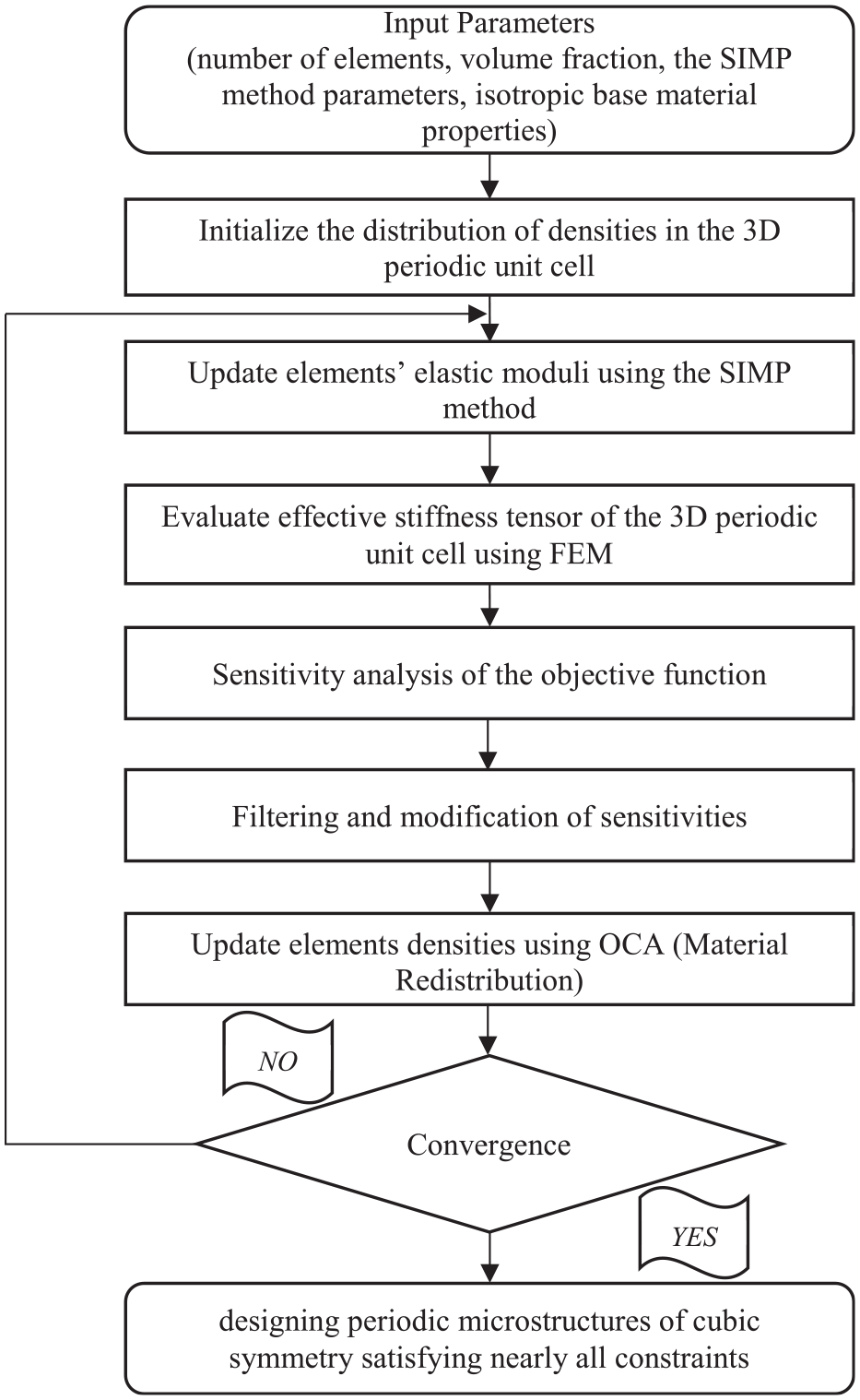
The flowchart of the SIMP methodology for the optimal design of a unit cell.
Initially, as shown in Figure 4, softer materials (elements with lower volume fraction) are located at the corners of the unit cell (consist of one-eighth of a sphere with the radius equals to one-third of the unit-cell edge) to avoid uniformly distributed sensitivity field and to update the element’s densities (Moshki et al., 2018; Xia et al., 2015).
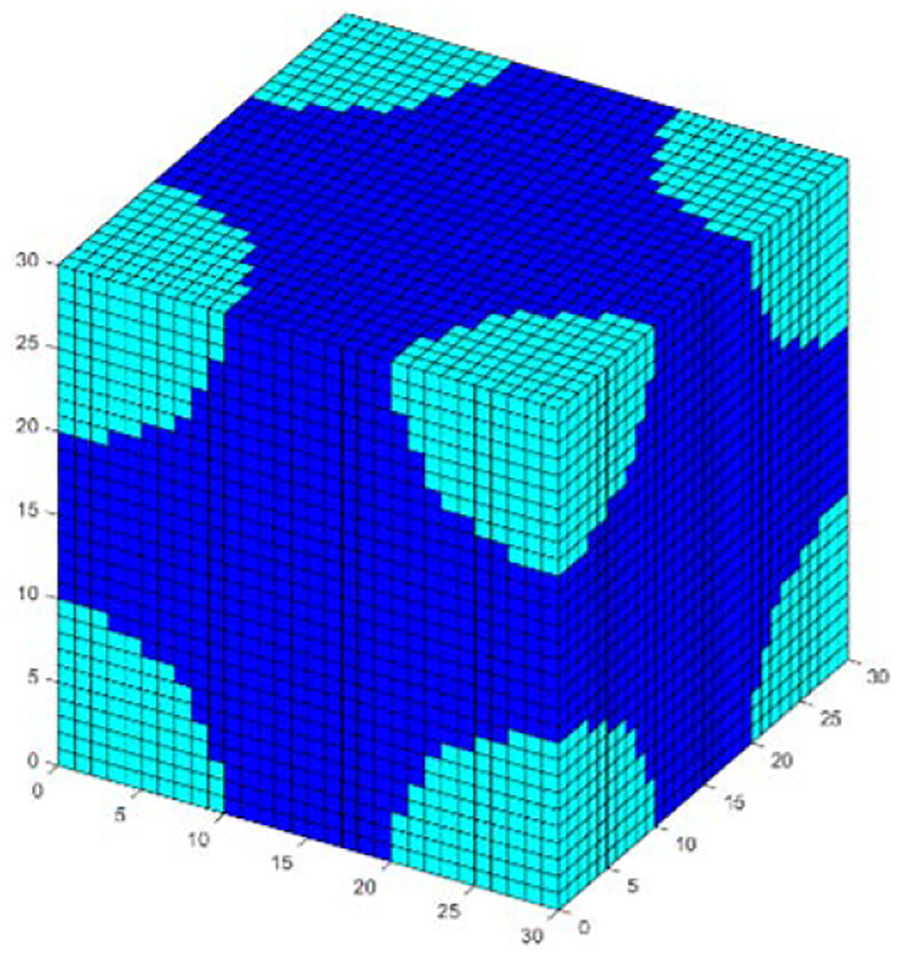
The illustration of the initial guess of topology to generate unit cells.
According to the type of application, different Poisson’s ratios can be obtained by changing the volume fraction as a constraint and filtration parameters. Setting 0.75 as the volume fraction and performing the topology optimization procedure with the objective function which is defined based on the arrays minimization of the effective compliance tensor, then, considering the effective Poisson’s ratio (Xia et al., 2015), smart SMP structures with negative and PPR of −0.184 and +0.213 were produced, respectively. NPR and PPR values of −0.184 and +0.213 are the results of the numerical topology optimization algorithm and cannot be interpreted as predetermined or special values. The generated unit cells and their middle sections are illustrated in Figure 5. In the next section, we compare the pure SMP structure with PPR and NPR and examine the effect of different mechanical and thermal parameters on the results, as well.
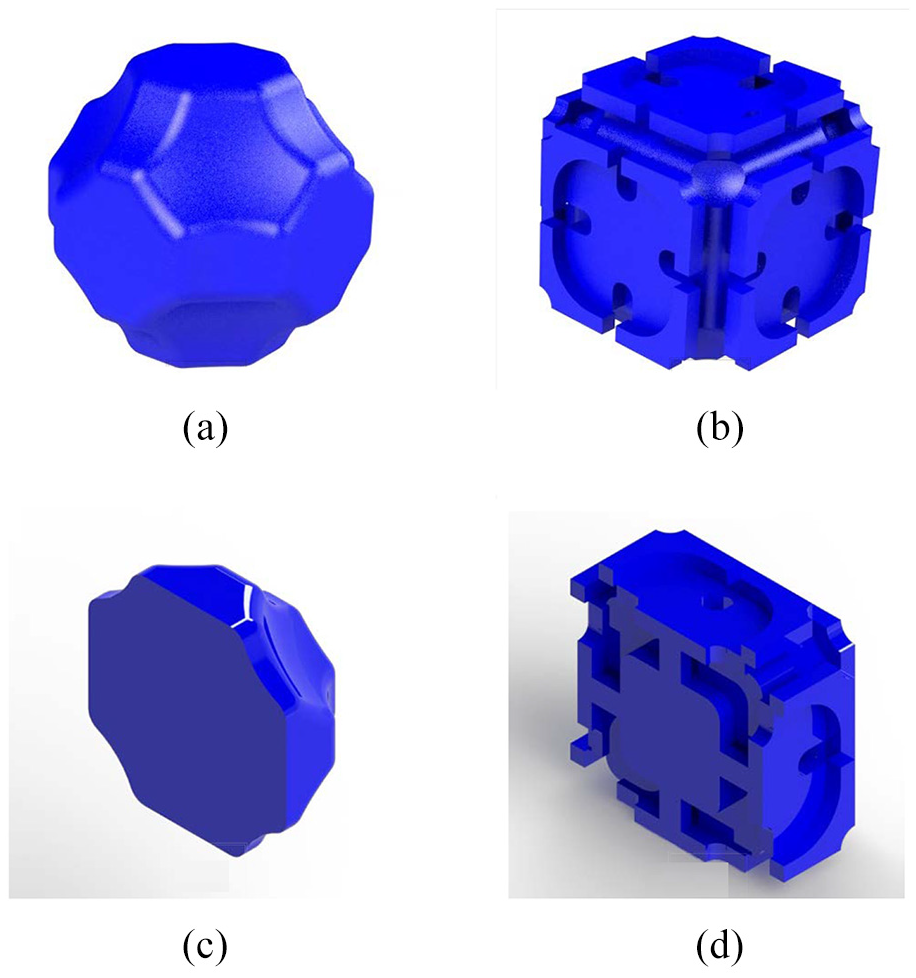
The unit cell of (a) the conventional structure (PPR) and (b) the auxetic structure (NPR). The middle sections of the unit cell of (c) the PPR structure and (d) the NPR structure.
4. FEA of SMP microstructure
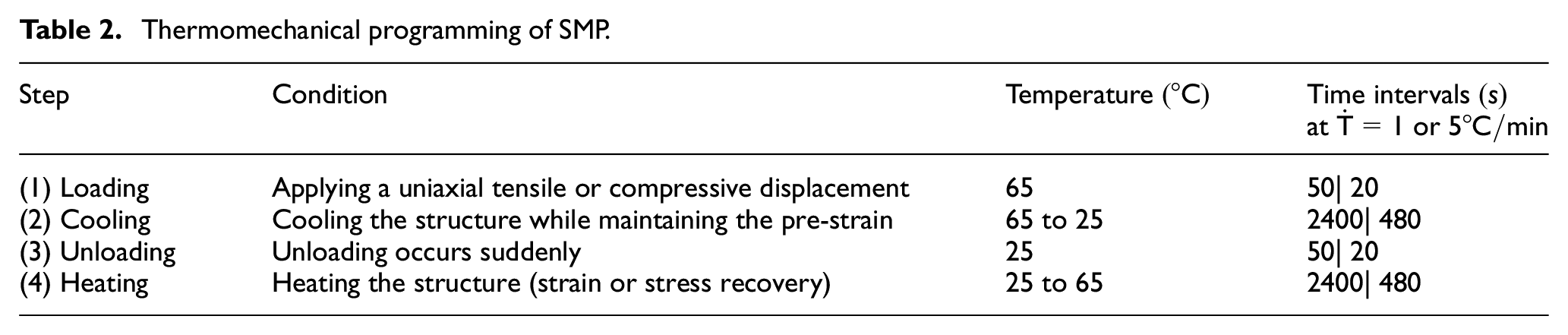
Finite element simulation is employed to implement the described SMP model and to study the results of the topology optimization in ABAQUS. Then, implementing the discussed SMP constitutive model, we properly account for the thermomechanical behavior of SMP. The whole steps of the thermomechanical cycle are explained in Table 2. The standard dynamic implicit solver with backward Euler time integration method is used while the nonlinear geometry effects are considered. Regarding the periodic pattern of the main structure, we repeat the unit cell, in three main directions to get RVE size.
Thermomechanical programming of SMP.
To construct the final 3D periodic cell (based on the asymptotic homogenization theory), cell dependency is examined for
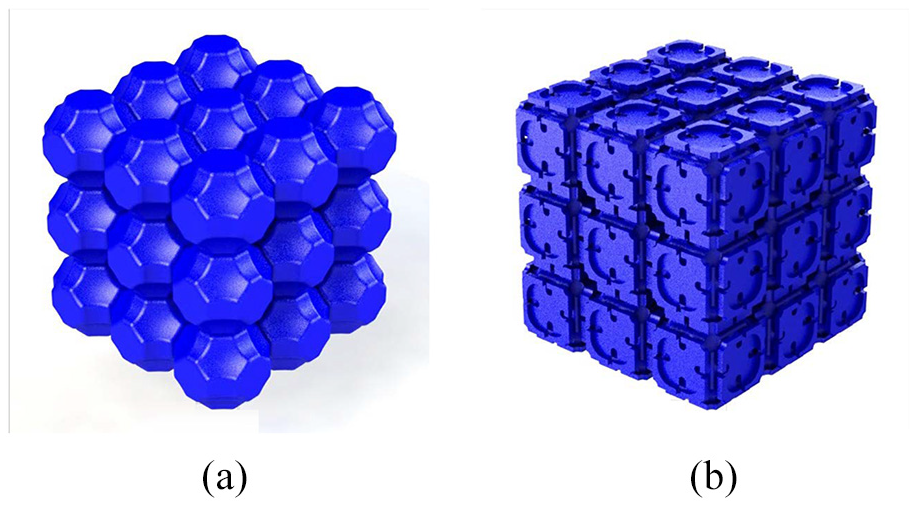
The RVE structures (a) with PPR = +0.213 and (b) with NPR = −0.184.
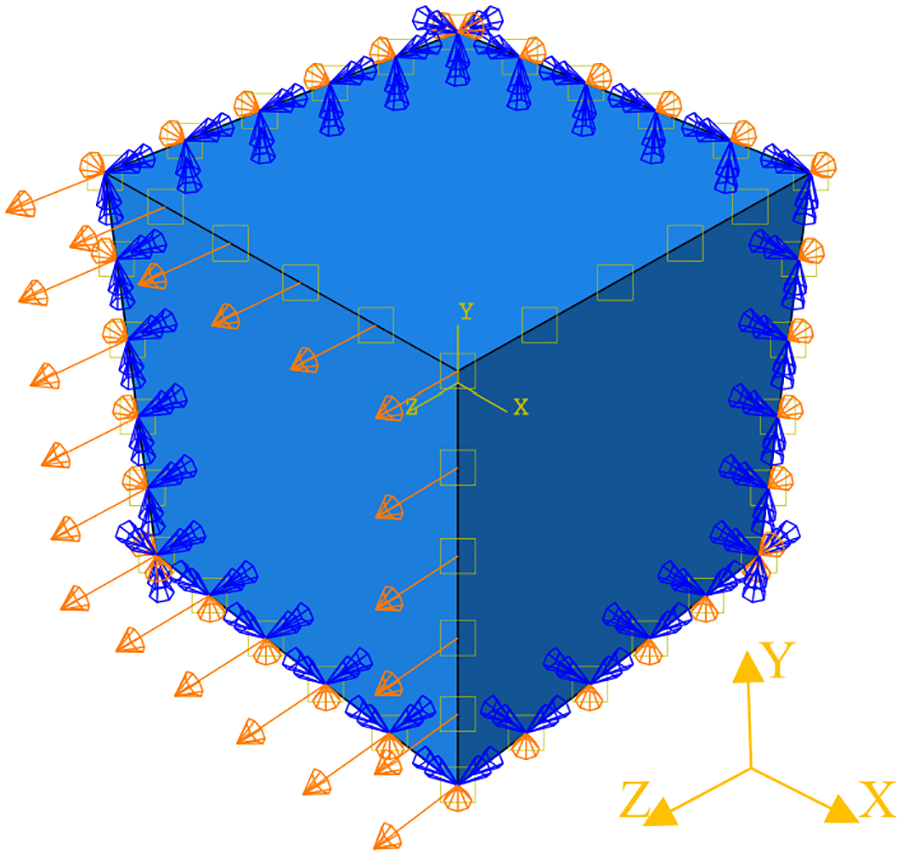
The boundary conditions applied to the sample unit cell (single element).
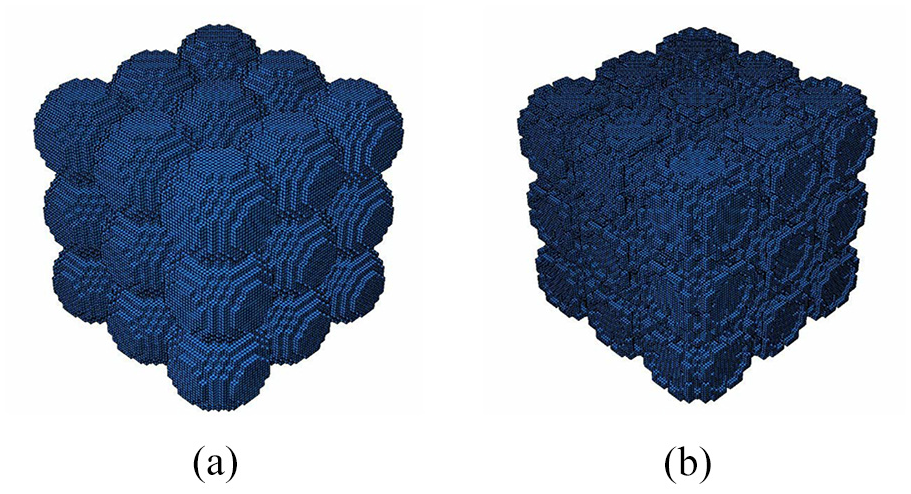
The structured mesh for the (a) PPR RVE and (b) NPR RVE.
4.1. Determination of elements size
To find the appropriate size of elements and optimal mesh, the final structure should be analyzed with different mesh grids. As shown in Figure 9, the mesh dependency analysis for the final auxetic structure at the heating step of the strain recovery cycle at 20% pre-strain and
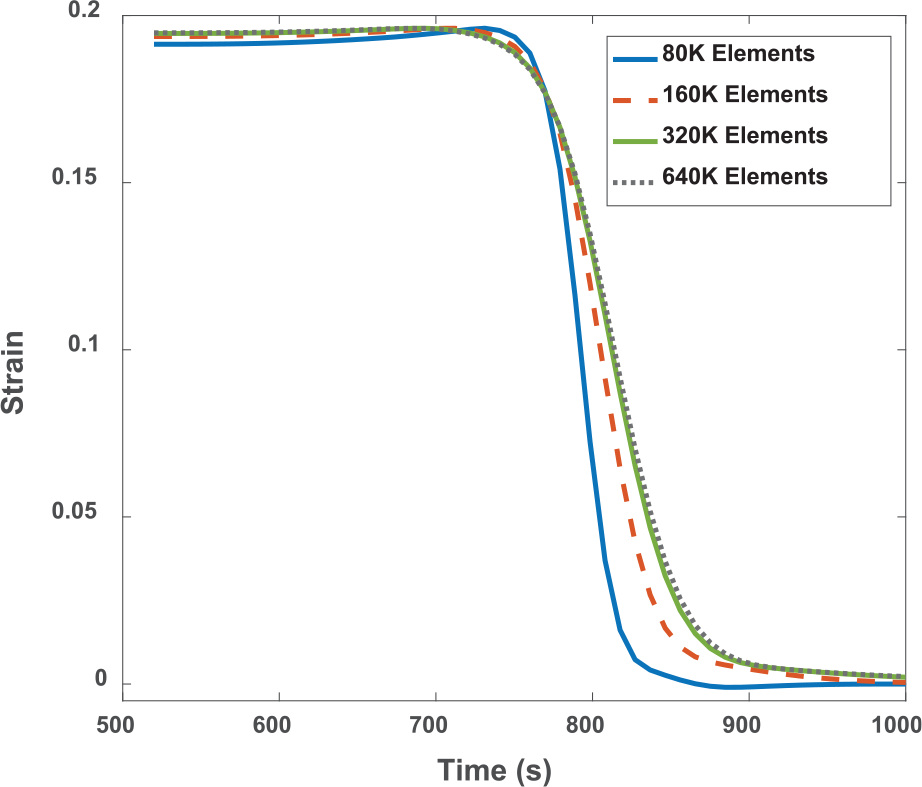
The mesh dependency analysis for the auxetic structure: the strain versus time in the heating step of the strain recovery cycle.
5. Results and discussion
To validate the numerical implementation of the SMP constitutive model, Arrieta et al.’s (2014) experiments are used and a pure SMP under uniaxial loading is considered in the simulation. According to Figure 10, the model results are compared with those of experiments at the heating step of the strain recovery and stress recovery stages under 20% pre-strain at
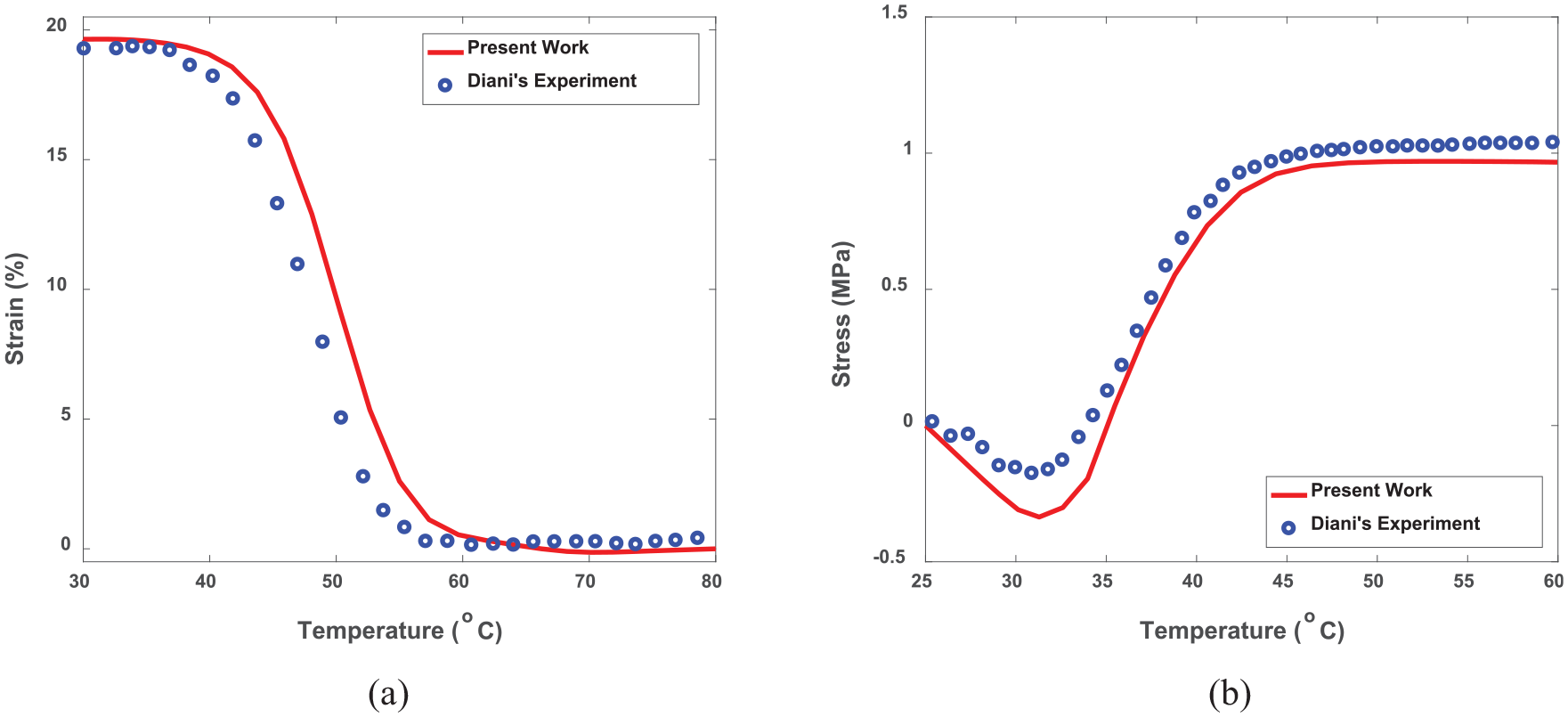
Comparison between the model results and experiments in Arrieta et al. (2014) at the heating step under 20% pre-strain at
5.1. Comparing PPR and NPR structures
Here, the effect of different parameters on structures is investigated. It is noted that for all results, the xyz- or 123-coordinate system is used. Furthermore, thermomechanical programming of structures, including loading sequences, related temperatures, and time intervals, is according to Figure 1 and Table 2, which are determined by numbers 1 to 4. First, a comparison between the PPR and the NPR structures behavior under 20% tensile pre-strain and at
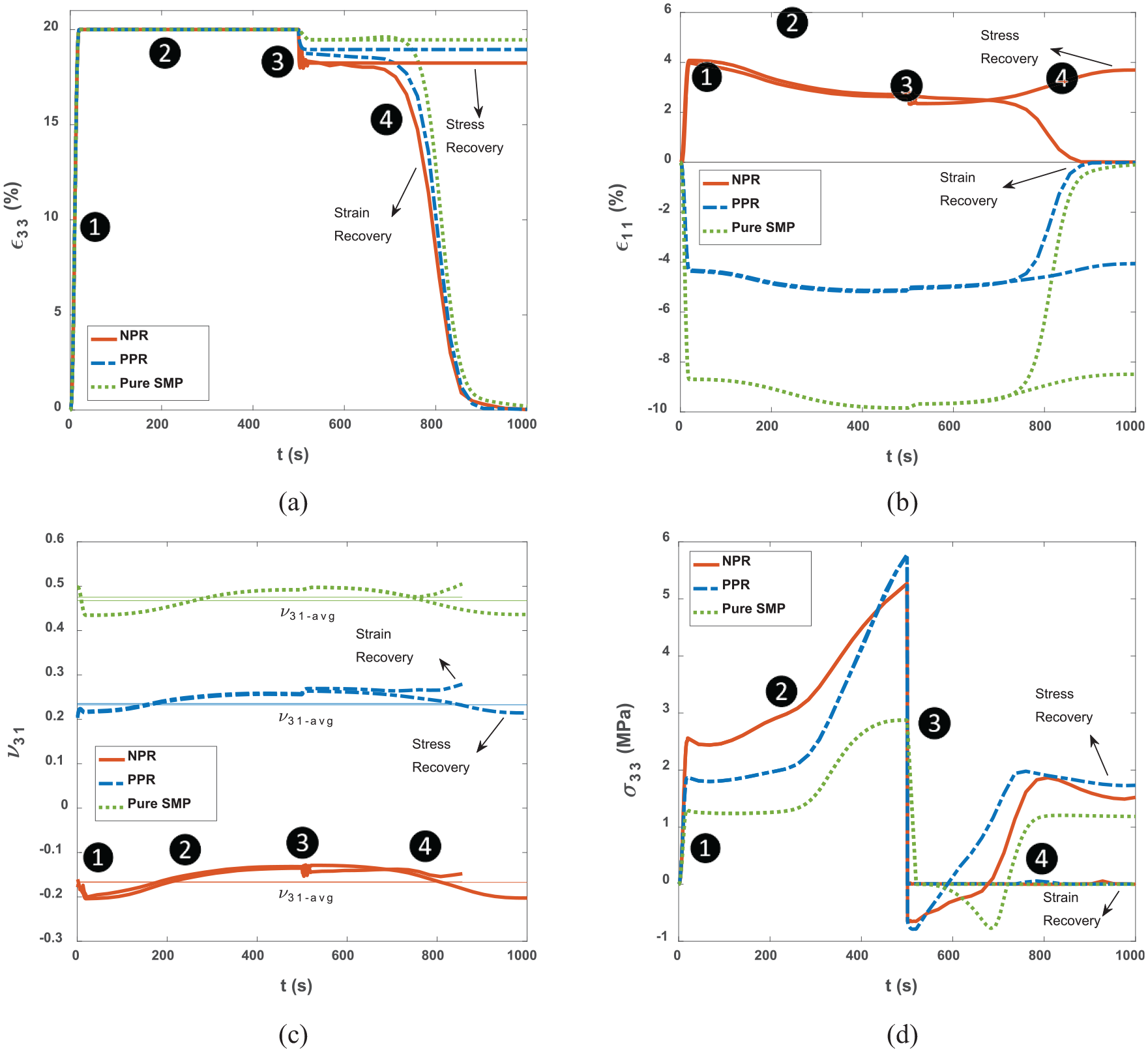
Comparing PPR and NPR structures with pure solid SMP in the strain recovery and stress recovery paths: (a) the strain along the loading
Results of the average Poisson’s ratio of FE simulation and topology optimization for PPR and NPR structures in the strain recovery and stress recovery.

5.2. The effect of pre-strain on the response of NPR structure
From this section on, for the sake of briefness, the results are reported only for NPR structure. Here, the behavior of NPR structure under 20%, 10%, and 5% pre-strains at
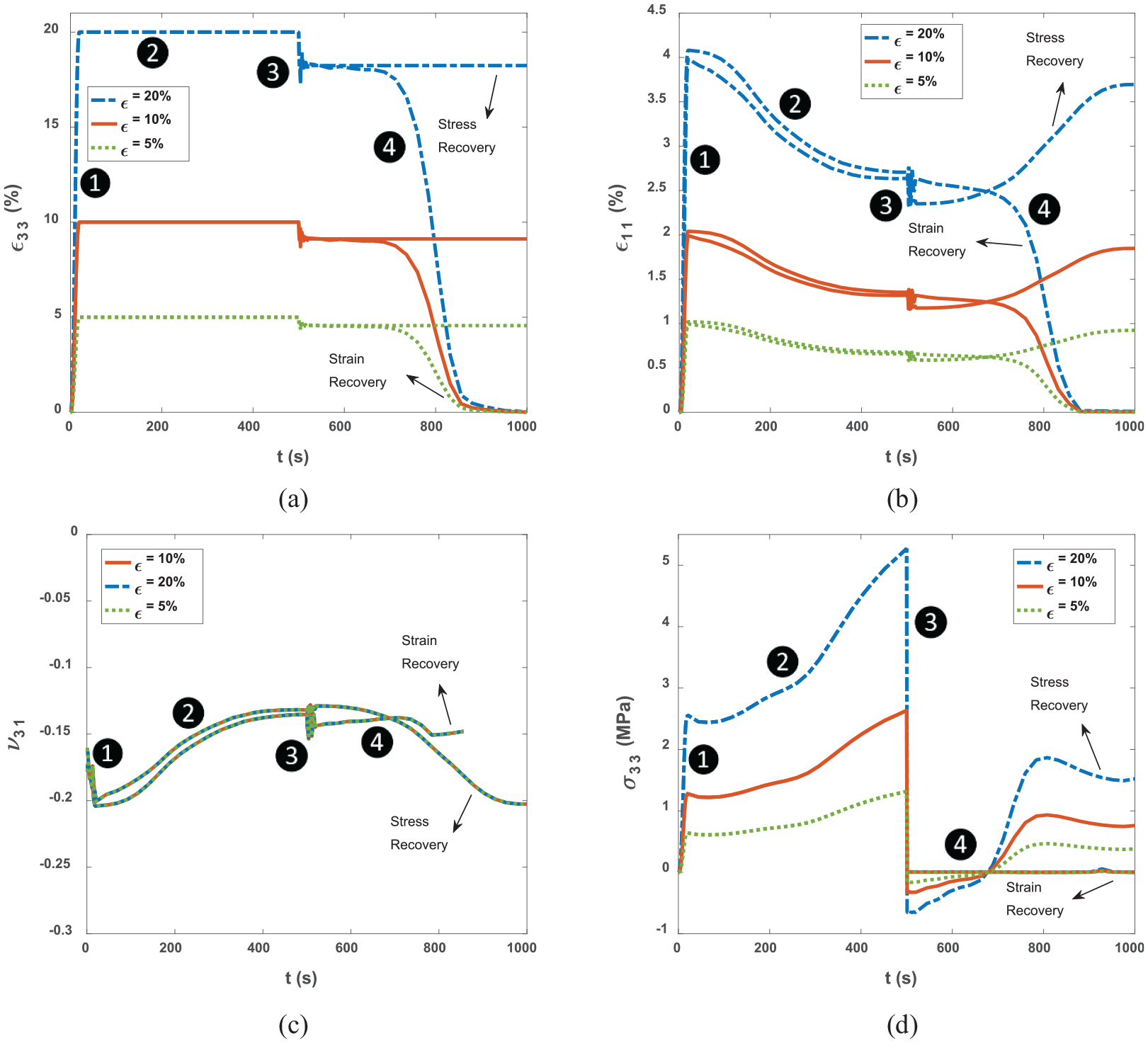
The effect of pre-strain on NPR structure in the strain and stress recovery paths: (a) the strain along the loading
5.3. The effect of loading type on NPR structure
In this section, a comparison between the behavior of NPR structure under 20% compressive loading and 20% tensile loading at
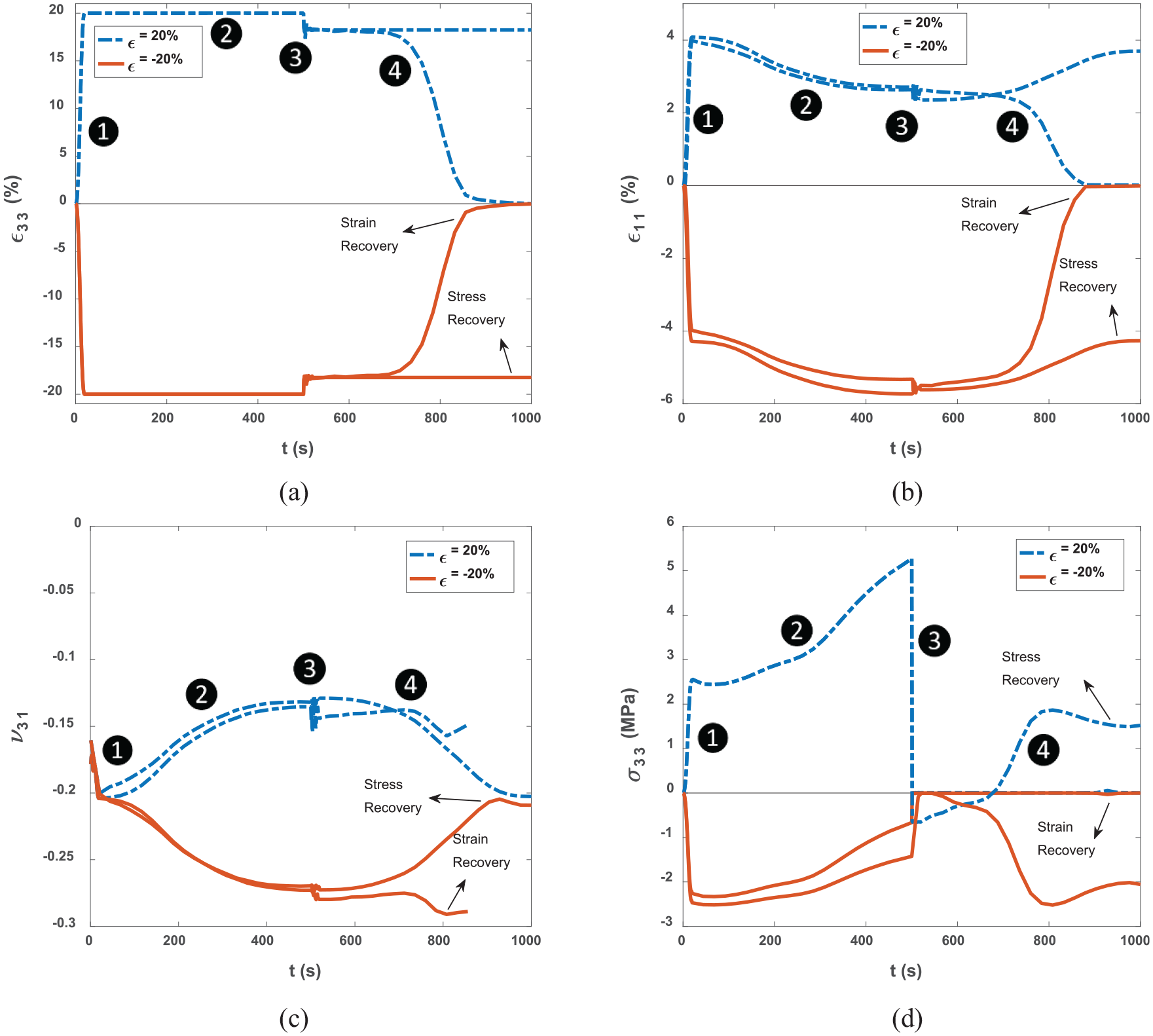
Effect of loading type on NPR structure in the strain and stress recovery paths: (a) the strain along the loading
5.4. The effect of temperature rate on NPR structure
Finally, to study the effect of temperature rate, the behavior of NPR structure under 20% pre-strain at
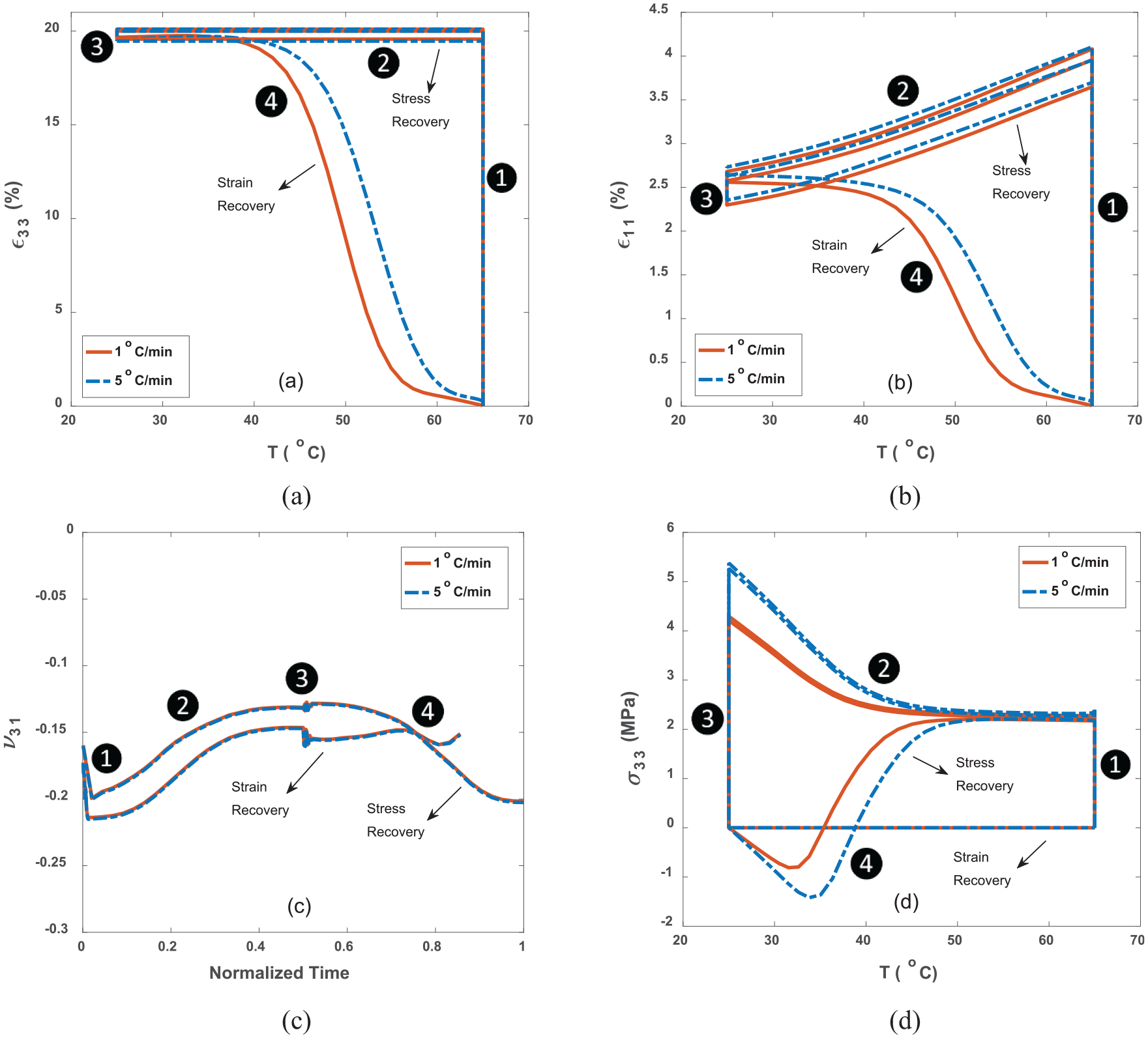
Effect of temperature rate on NPR structure in the strain and stress recovery paths: (a) the strain along the loading
6. Summary and conclusion
In this research, the material design and the FEA of a smart auxetic 3D meta-structures based on SMPs were numerically examined. These shape memory metamaterials can be used in biomedical devices and structures, in which two rational designing and SME have been coupled. It means the auxetic or conventional properties of structures can be controlled via an external applied thermal source. For instance, these structures could be used as bone repairing tools or deployable scaffold in the body. In this work, first, tunable PPR and NPR unit cells were created by optimizing the topology using the SIMP method. Then, RVEs and the final 3D structures were generated by repeating the unit cells. Thereafter, FE modeling was done based on the thermo-visco-hyperelastic constitutive model at large deformations for SMPs. Results of topology optimization and FE simulation were compared, and the relative differences were less than 10%. The behavior of PPR and NPR smart structures was studied and evaluated. Also, the effect of mechanical and thermal parameters was explored which could be summarized as follows. (1) The amplitude of the strain and the stress is lowered with almost the same ratio by reducing the applied pre-strain; however, pre-strain nearly does not affect Poisson’s ratio. (2) Different types of loading may result in a different strain, stress, and Poisson’s ratio due to the history-dependent thermomechanical behavior of the SMP-based structures. (3) The temperature rate influences the behavior of smart structures, and the more slowly the temperature changes, the more strain and shape recover at a specific temperature.
Footnotes
Acknowledgements
The authors are grateful for the research support of the Iran National Science Foundation (INSF).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.