
Abstract
Inspired by the origami, a series of smart circular structures with large folding ratio was designed and fabricated by four-dimensional printing in this article. The structure consists of the crease and plate parts by embedding the Miura-ori into a folding fan, and has the characteristics of bi-stable states and self-deployment by introducing soft and hard shape memory polymers. The shape memory polymer material parameters were obtained by the dynamic-mechanical analyzer, and then the constitutive equation can be determined. To demonstrate the folding and deployment performance of the smart structures, the experiment and finite element simulation was carried out. It is shown that the structures can repeatedly be folded and deployed by temperature-controlled shape memory effect of shape memory polymer. This design can be applied to the large-scale and multiple level smart structures such as antennas and deployable solar sails.
Keywords
1. Introduction
Origami can not only create esthetically pleasant structures but also enable the design of structures with novel mechanical properties, including negative and adjustable Poisson’s ratio (Fang et al., 2016; Yasuda and Yang, 2015), mechanical response (Bertoldi et al., 2017), and multistability (Silverberg et al., 2015). The origami can offer novel ways to fabricate, assemble, store, and morph structures. The current applications of origami-inspired engineering include space-deployable structures such as solar sails (Costanza and Tata, 2016; Rui et al., 2018), robots (Pagano et al., 2017; Sareh et al., 2018; Taghavi et al., 2018), metamaterials (Boatti et al., 2017; Liu et al., 2018; Wang et al., 2017), and so on.
Concerning the art-of-the-state research of the folding and deployable smart structures, the recent attention is focused on the metastructures by four-dimensional (4D) printing. The original 4D printing technology refers to the addition of a time dimension to three-dimensional (3D) printing technology, that is, after being formed by 3D printing, components will change their own structure under the excitation of the external environment. In recent years, the connotation of 4D printing has been further enriched. Ge et al. (2012, 2014) developed a novel 3D microfluidic paper–based immunodevice and the 4D printing concept to the design and fabrication of active origami structures. Miyashita et al. (2017) developed a miniature origami robot using the origami structure as its skeleton. Lee et al. (2017) designed a wheeled robot based on origami twisted tower, which can make the robot pass through various road conditions. Wang et al. (2018) demonstrated a 3D-printed integrated origami structures based on the Miura pattern and square-twist origami structures. Kamrava et al. (2019) created a family of origami-inspired cellular metamaterials which show the stability and reconfigurability of the origami unit cells. It is believed that 4D printing is to realize the control of shape performance or function of components in time and space dimensions through additive manufacturing technology of intelligent materials or non-intelligent materials for the application requirements of deformation, variable properties, and functions of the structures.
Shape memory polymers (SMPs) are a kind of stimulus response material, which can restore its initial shape after deformation through the stimulation of external conditions such as thermal, electricity, light, and chemical induction (Du et al., 2017; Habault et al., 2013; Lai et al., 2018; Li et al., 2019; Zhao et al., 2015). Compared with shape memory alloy (SMA) and piezoelectric ceramic materials, SMP has the advantages of high strain recovery, low density, low cost, simple shape programming program, and so on. In recent years, the research on 4D printing based on SMP has aroused a wide research upsurge in the academic and engineering fields. Figure 1 shows the SMP 4D printing program. The 4D printing with SMPs generally requires the following three steps: (1) processing by 3D printing; (2) thermo-mechanical programming, including heating and deformation, cooling and unloading; and (3) deployment/actuation.
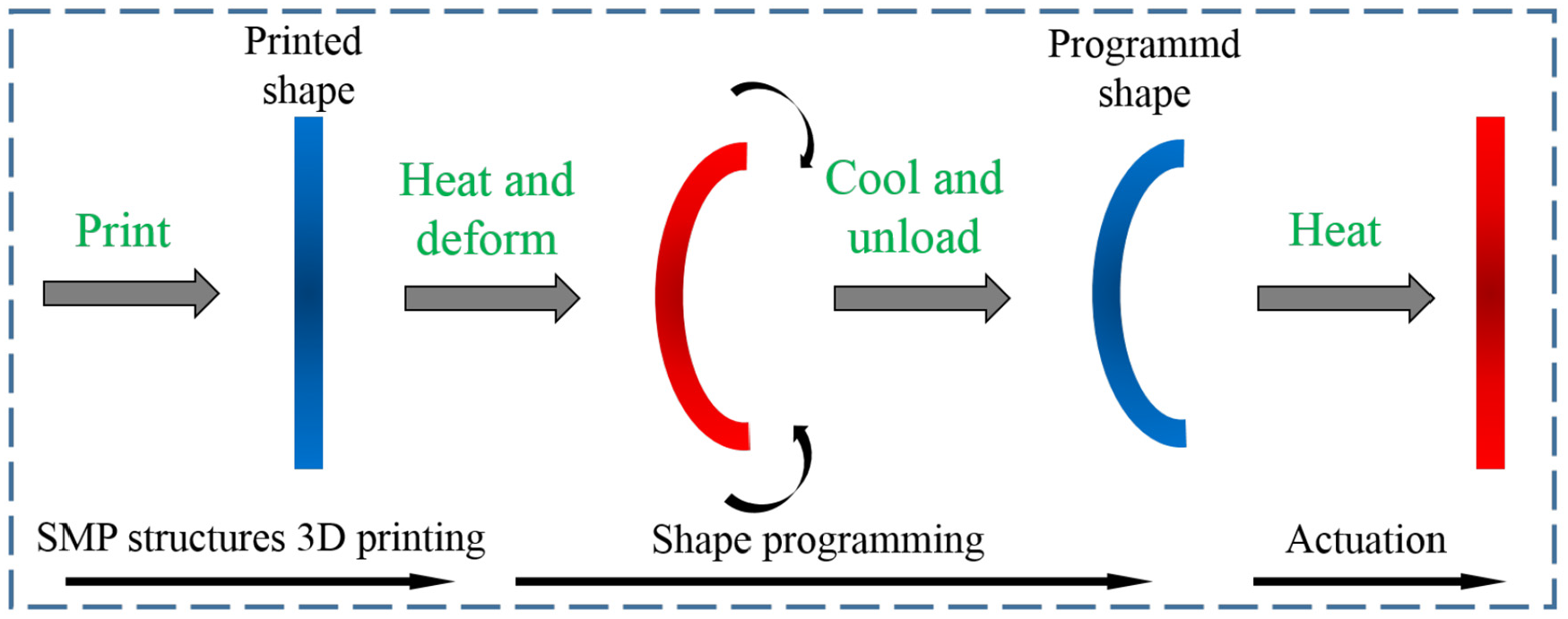
SMP 4D printing program.
It is possible to develop various smart structure metastructures using SMP and 4D printing. For examples, a 4D-printed thermo-responsive stent with changeable diameter was demonstrated by Bodaghi et al. (2016). A kind of elastomer metamaterials used as reversible shape-shifting connectors is fabricated by Jiang and Wang (2016). These materials can be applied through the 4D printing process to bridge components with flexible twisting or bending. Moreover, Choong et al. (2017) demonstrated a photopolymer printable by stereolithography apparatus to build the parts with complex geometries and the shape memory behavior. Lei et al. (2019) designed gradient/digital patterns and cylindrical shells. The printed structures can reshape using the auxetics and shape memory effects of materials. Zhang et al. (2019) reported an approach to develop a double-network self-healing (SH)-SMP system for high-resolution SH 4D printing. In addition, multi-material printing methods to build the structures with smart performance and function have been proposed. Mao et al. (2015) demonstrated sequential self-folding structures realized by thermal activation of spatially variable patterns based on 3D printing of SMPs. Ge et al. (2016) presented a new 4D printing approach for multi-material SMP architectures with high resolution (up to a few microns). Chen et al. (2017) designed the reversible, deployable structures with defined load bearing capacity and predictable activated geometries. Zhang et al. (2018) demonstrated the shape memory behavior and recovery force of 4D printed circular braided tube using silicone elastomer matrix composites.
In this article, a series of SMP circular structures inspired by origami was fabricated by 4D printing. The structures have large folding ratios and can be fixed and deployed in response to temperature changes. The experiment and finite element (FE) analysis was carried out to study the folding, fixation, and deployment features of the structures.
2. Material properties and FE simulation of SMP
2.1. Mechanical property determination of SMP
Dynamic-mechanical analyzer (DMA) is a key technique to reveal the change of molecular motion of SMPs, which connects the macroperformance with the microstructure at the molecular level.
In this article, two types of SMP materials, RGD8530 and VeroWhitePlus, are considered, respectively. Cylindrical specimens with a diameter of 7 mm and a height of 9 mm are prepared. The storage modulus and glass transition temperature of SMPs can be obtained using the DMA machine. Table 1 shows the thermo-mechanical properties of the SMP materials, where
Material parameters of RGD8530 and VeroWhitePlus.

Both two types of SMPs exhibit large changes of the modulus with temperature. At high temperature, SMPs are in rubber state with very small modulus, while at low temperature, SMPs are in the glass state and its modulus increases by two orders of magnitude. The thermal expansion coefficient of SMP is very small and then the thermal expansion can be ignored in the calculation. Generally, the large and sharp difference in the storage modulus near temperature of the glass transition always means the excellent shape memory effect of the SMP materials.
2.2. Simulation method of SMPs
The constitutive model of SMPs is highly significant for the accurate prediction of their thermo-mechanical properties. Previously, a one-dimensional (1D) constitutive model of SMPs was developed by modifying a linear viscoelastic theory (Tobushi et al., 2001)


where
It is assumed that SMPs are isotropic materials. The 3D constitutive model of SMPs can obtained by extending the 1D constitutive model
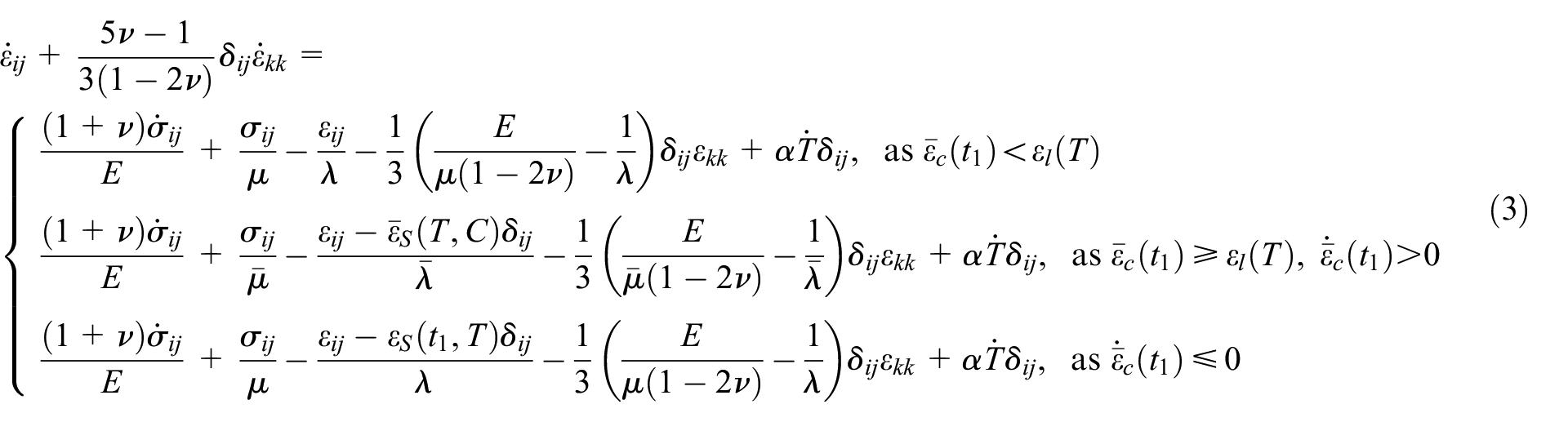
where C and
under the conditions
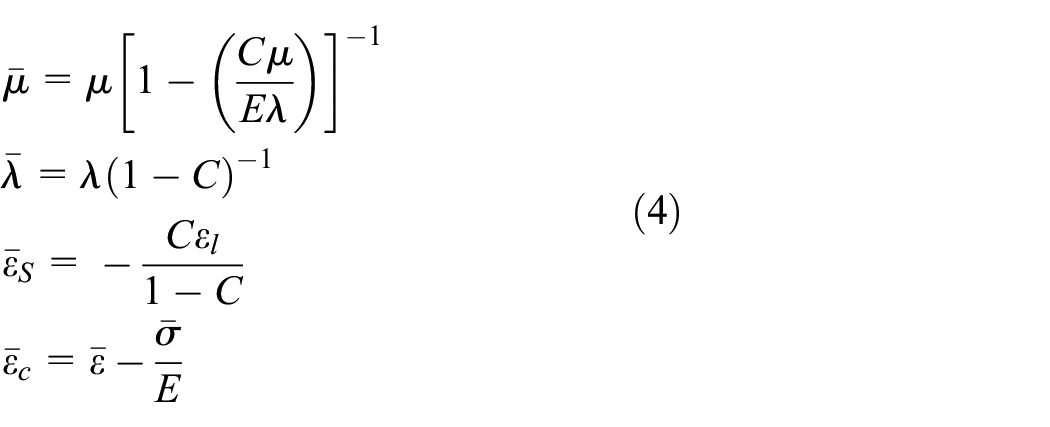
In the process of temperature change, SMPs will undergo a transition between the glass state and the rubber state, and therefore, their material properties will also change significantly. In order to describe the thermo-mechanical behavior of SMPs, Tao et al. (2018) established a relationship between material parameters and temperature. The function of the reversible strain in terms of the material parameters is

where
Then equation (5) was introduced into the temperature-dependent material parameter equation, and the SMP parameter equation can be obtained
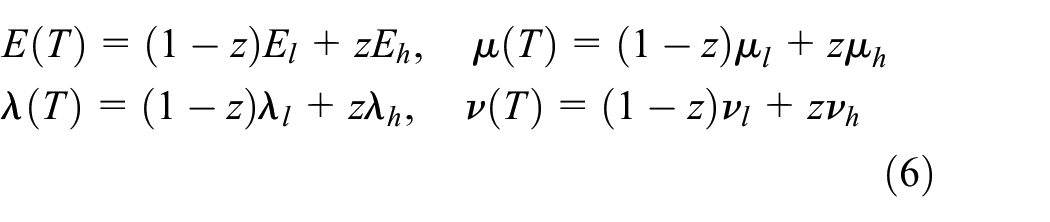
where
These material parameters calculated by equation (6) are in good agreement with the experimental data. For FE analysis of SMP structures under complex stress states, the SMP constitutive equation and the material parameters were integrated into ABAQUS using a user material subroutine (UMAT).
3. Origami structure design and model
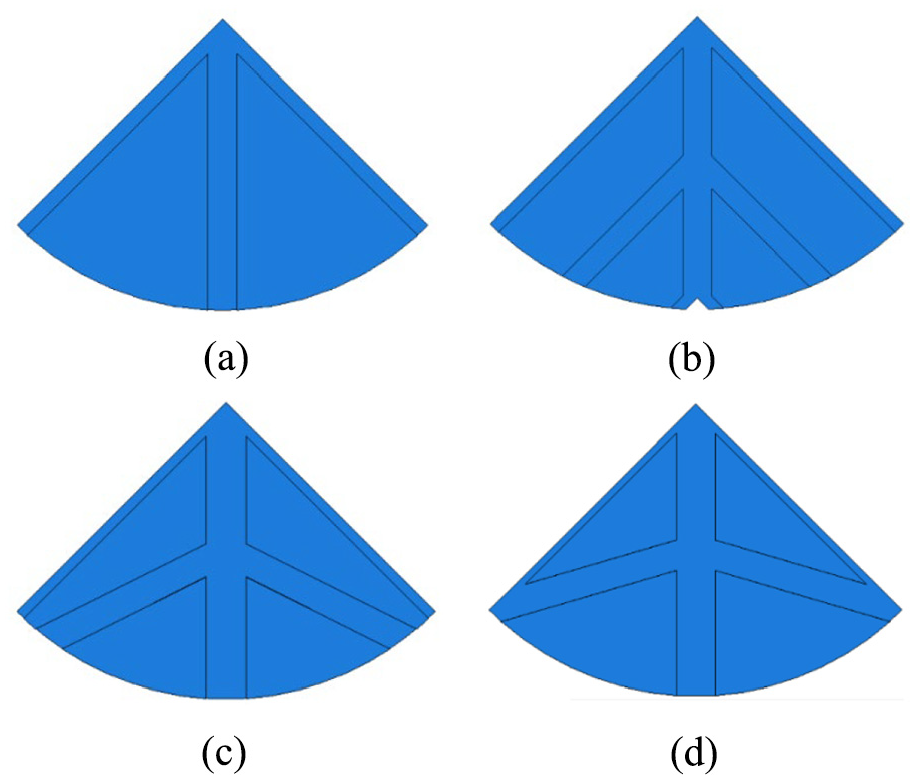
In this article, an origami structure based on folding fan pattern was adopted as shown in Figure 2(a), with mountain creases represented by solid blue lines and valley creases by solid red lines. This structure is denoted as F-M-1 for the convenience of description. Assuming that the total number of mountain and valley creases is n, then the circle is divided into n segments. As the structure is cut along a mountain crease, then it can be folded according to the remaining creases. In the folding process, the paper surface outside the creases does not deform, which means that the fold is rigid fold. Besides, the Miura fold pattern, or the Miura-ori, is widely used tessellation in engineering design, which participates into the structural transformation, allowing for offering large-size dimensional variation upon folding. In the following design, the Miura-ori is embedded into the folding fan pattern, and three different origami structures were derived according to the evolution of the Miura-ori. As shown in Figure 2(b), where the mode was named as F-M-2, the embedded Miura-ori crease angle is the same as the fan-shaped crease angle, meaning that the creases in each fan-shaped section are parallel. Then we can draw the midpoint of mountain creases and the perpendicular line of mountain creases at the intersection with the circle to form two squares, and connect the midpoint of mountain creases with the vertex of the big square to form the Miura-ori crease, as shown in Figure 2(c). This structure mode was denoted by F-M-3. In Figure 2(d), F-M-4, we can draw a concentric circle of a model circle with a radius of half the radius of the model circle, connect the intersection of mountain creases and small circle and valley creases and big circle, and form the Miura-ori crease. From F-M-2 to F-M-4, the Miura-ori crease angle increases successively. Compared with the F-M-1, these designs can obtain a larger folding ratio while avoiding the folding difficulty caused by all the creases intersecting at one point.
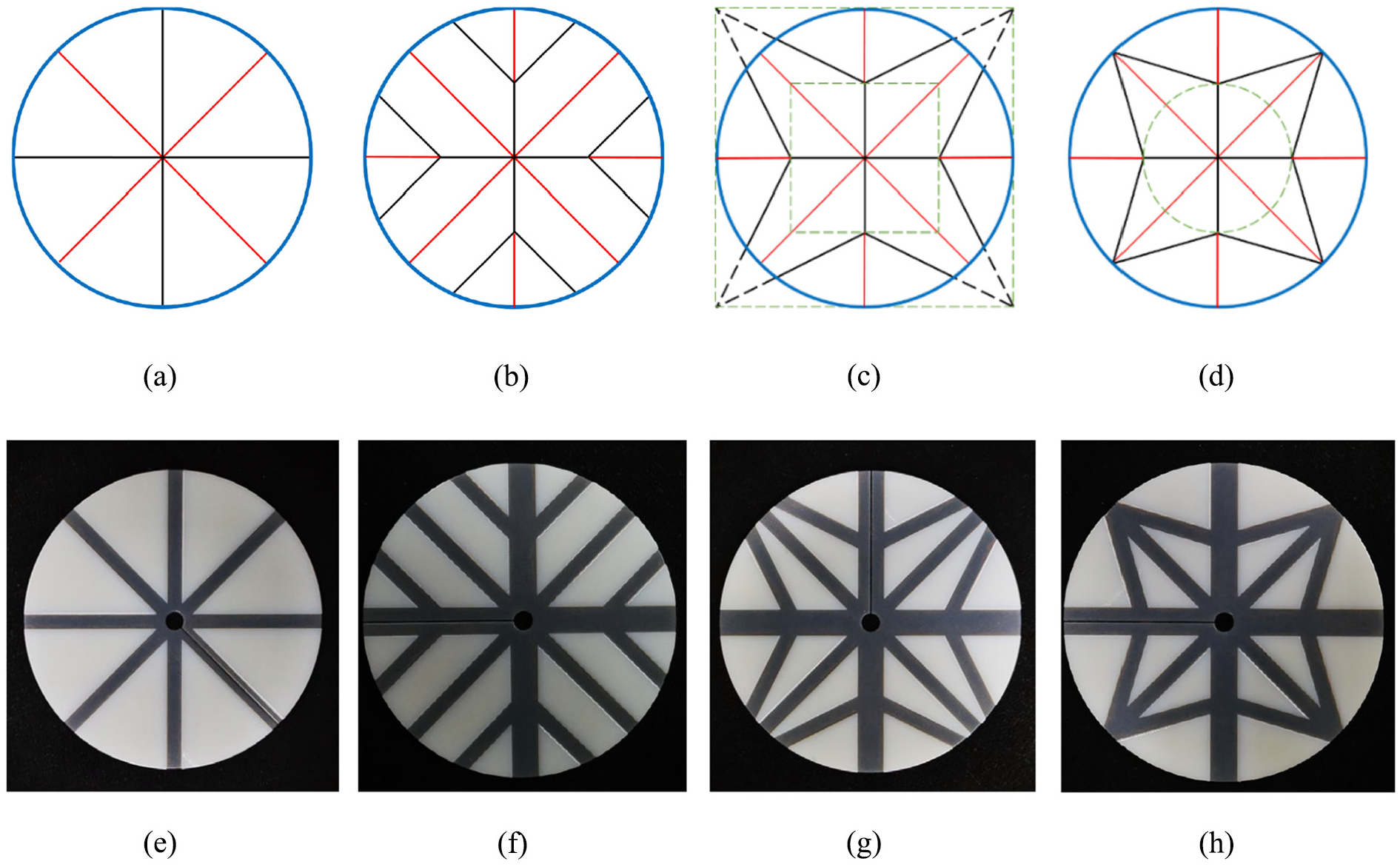
The model diagram of (a) F-M-1, (b) F-M-2, (c) F-M-3, and (d) F-M-4 and the printing model of (e) F-M-1, (f) F-M-2, (g) F-M-3, and (h) F-M-4.
According to the design of the above four models, the additive manufacturing technology of 4D printing was adopted to prepare multi-material origami structures. The printed models of the four modes are shown in Figure 2(e) to (h). In the 4D printed structures, the diameter of the circle is 60 mm. The models also include such parameters as crease thickness t = 0.6 mm, plate thickness t = 1.4 mm, narrow crease width d = 4 mm, and width of the crease d = 7 mm. The RGD8530 is used to construct the crease parts, as shown by the black parts in Figure 2(e) to (h) while the VeroWhitePlus is used to construct the plate parts, as shown by the white parts in Figure 2(e) to (h). During the heating process, when the crease parts have been converted into the rubber state with lower modulus, the plate parts remain in the glass state with high modulus.
4. Experiment and FE analysis
4.1. Experimental demonstration of folding and deploying process
In the folding and deploying process of origami structures, the creases constructed by RGD8530 as hinges to realize the folding, fixing, and deploying functions of structures in the deformation process, while the plates constructed by VeroWhitePlus play roles in maintaining the origami structures upon the deformation. Through the design of origami configuration and the introduction of SMP, the origami structures can be folded to a small size at high temperature and maintained folded state by cooling down, and then they can deploy actively by heating up again.
The folding and deployment process of origami structures mainly takes advantage of the shape memory characteristics of crease SMPs, while for the plate parts to maintain the shape of origami due to the high modulus of the plates. The glass transition temperature of RGD8530 is 43°C and that of VeroWhitePlus is 58°C. Therefore, the selected high temperature is the temperature between their glass transition temperatures, while the low temperature is lower than both their glass transition temperatures. When the origami structures are in a constant temperature environment at 55°C, the crease SMP changes from the glass state to the rubber state, and the modulus is significantly reduced and then the structures deform easily.
As the representative foldable and transformable structures, the origami structure is highly pursued in broad industries due to the small occupation area and light weight. In this article, the folding ratios of origami structures were discussed. In F-M-1, the area of the circle before folding is defined as S, and the number of folds is n, so the area after folding is S/n. Take the crease number of 8 in this article as an example, compared to the planar area of the original unfolded structure, the folded area occupies original area of 12.5% (87.5% reduction). Similarly, the other three models were folded at 55°C at a constant temperature according to the crease mode of the origami model. These three modes of origami structure can provide a very large folding ratio. The other three origami structures possess planar area reduction are all about 90% when they are fully folded.
The self-lock characteristic of the origami structure was observed in the multi-material printed structures due to the shape memory effect of SMP, which indicates the presence of bi-stable states. When the folded model was placed in the environment of 15°C, the folded SMP changed into a glass state with high modulus again, the strain energy generated by the folding deformation is stored in the crease SMPs, and the model was fixed to a folded stable state, as shown in Figure 3.
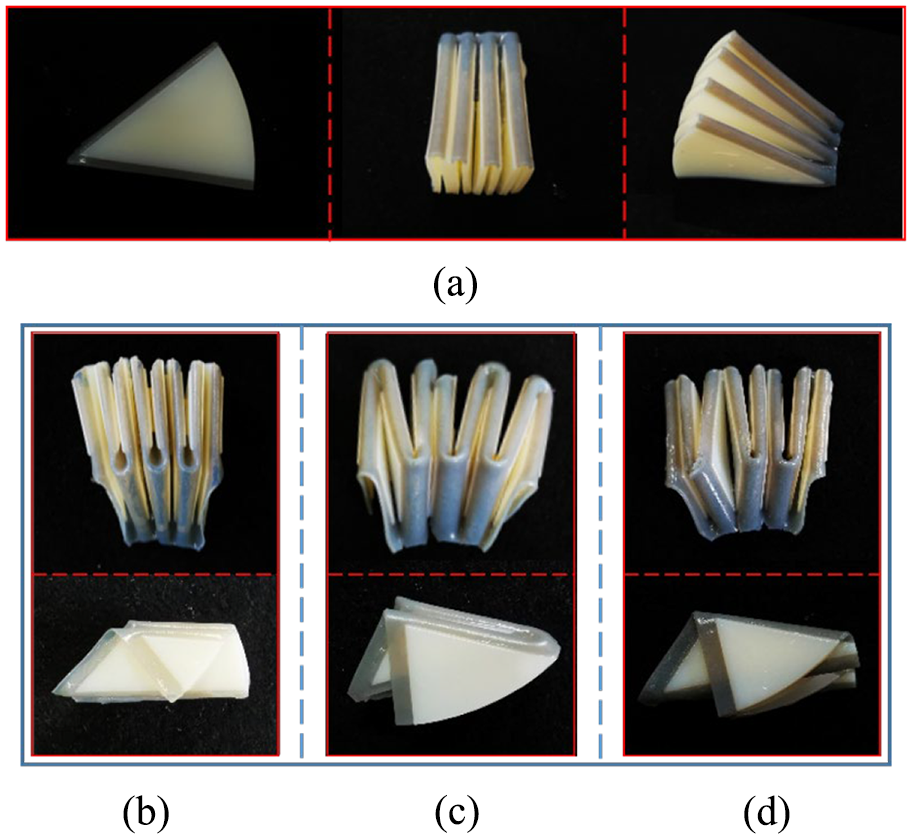
The fixed state of (a) F-M-1, (b) F-M-2, (c) F-M-3, and (d) F-M-4.
Reversibly, the origami structures can release strain energy stored in the above process by responding the changes of the environment, thus returning the structures to their original shape. To well describe this process of structure transformation, the model of F-M-1 was placed in a constant temperature environment of 55°C, and the origami structure was spontaneously deployed through heat trigger. In this process, the crease SMP changed to a rubber state with lower modulus by responding to the environment temperature. As a result, the stored strain energy was released, and the deformation was restored at the same time. Until the deformation at the creases was completely restored, and the origami structures completed its spontaneous deployment. As shown in Figure 4, in constant temperature water at 55°C, F-M-1 began to deploy at 1 s. With the rapid release of strain energy stored in the crease, the structures expanded rapidly. Then, the strain energy release speed of the crease SMP decreased, and the deployment speed of the structures was gradually slowed down, until the structures were fully recovered to the initial state and completed deployment at 13 s.
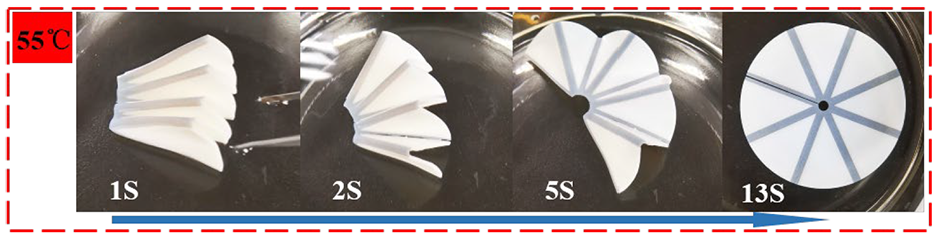
Self-deploying process of F-M-1.
After folding and fixing, the other three models F-M-2, F-M-3, and F-M-4 were also placed in the constant temperature water at 55°C for spontaneous deployment. The deployment process was shown in Figure 5. The deployment process also starts with rapid deployment and then slows down to full deployment. In addition, due to the embedding of the Miura-ori crease, the strain energy stored by the structures after folding is larger than that of the fan model, so the deployment speed of the structures is slightly higher than that of the fan model after starting the corresponding temperature deployment.
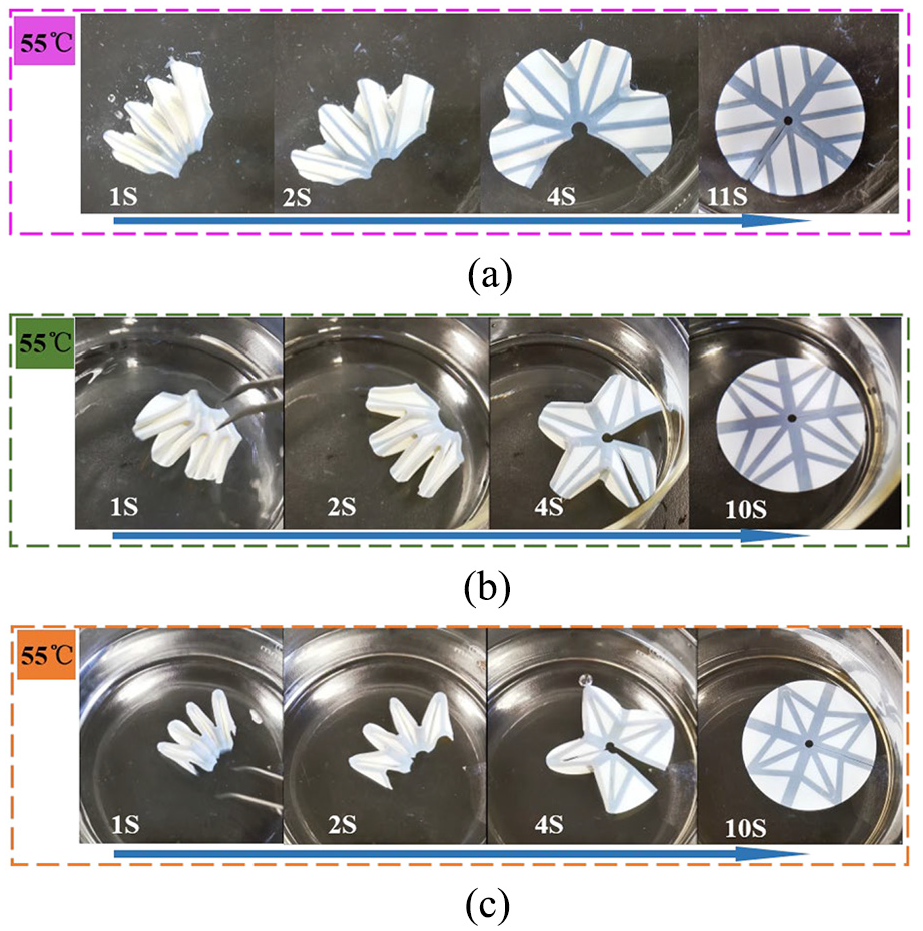
Self-deploying process of (a) F-M-2, (b) F-M-3, and (c) F-M-4.
Through the experiments on folding, fixing, and deploying of a series of origami structures, it is proved that these structures have excellent foldability and self-deployable characteristic, which can provide ideas for the design of spatial deployable structures and intelligent self-transforming structures.
4.2. FE simulation
The FE simulation was used to analyze the smart structures of SMPs. Based on the size and shape of printed structures, a representative volume element (RVE) of circular origami structures was established. The FE models of the four modes are shown in Figure 6 (In order to facilitate the loading in simulation, a corner of the F-M-2 FE model was cut off without affecting the simulation result.).
The FE models of (a) F-M-1, (b) F-M-2, (c) F-M-3, and (d) F-M-4.
In the simulation, four steps of high temperature (328 K) loading, cooling (288 K), unloading and heating (328 K) were set, and the user material subroutine (UMAT) was called to assign SMP material parameters to the crease parts and the plate parts, respectively. SMP parameters were selected from the above experimental data. Because the deformation mainly occurs in the crease parts, the crease parts are refined in the mesh of FE.
The FE simulation results of F-M-1 were shown in Figure 7, which illustrates the strain of the structure during the folding and deployment. Obviously, the deformation of the structure mainly occurs in the creases, while the plate part does not. During the whole process, the maximum strain of the structure reaches 60%. Besides, similar to the experimental results, the RVE model of F-M-1 can be folded at high temperature and maintained in a fixed folded state through cooling. After heating up, the folded structure gradually deployed to its initial shape. The FE results are in good agreement with the experimental data.
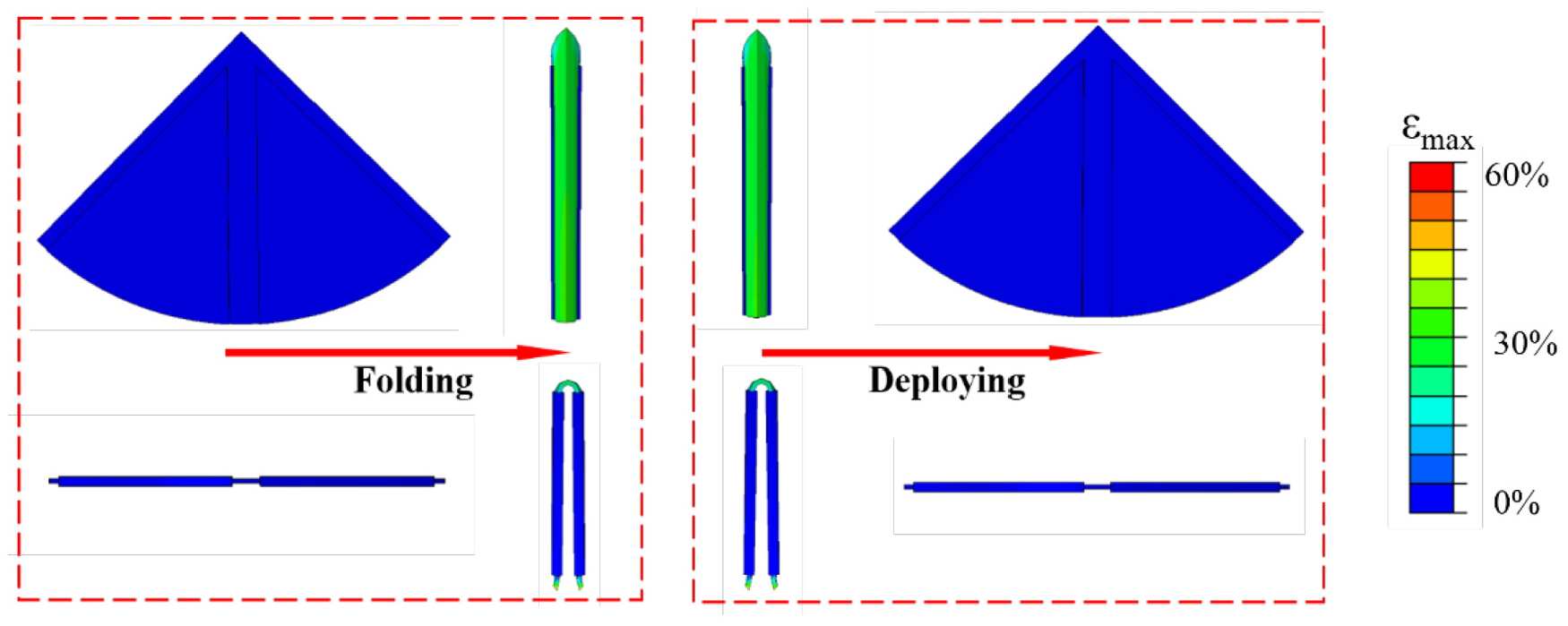
The FE results of F-M-1.
The displacement curve in the x-direction in the whole folding and expansion process at the intersection point between the middle crease and the circle (the point with the maximum displacement perpendicular to the direction of the sector plane) is extracted, as shown in Figure 8. A shape fixation ratio is defined by

and the shape recovery ratio is defined as

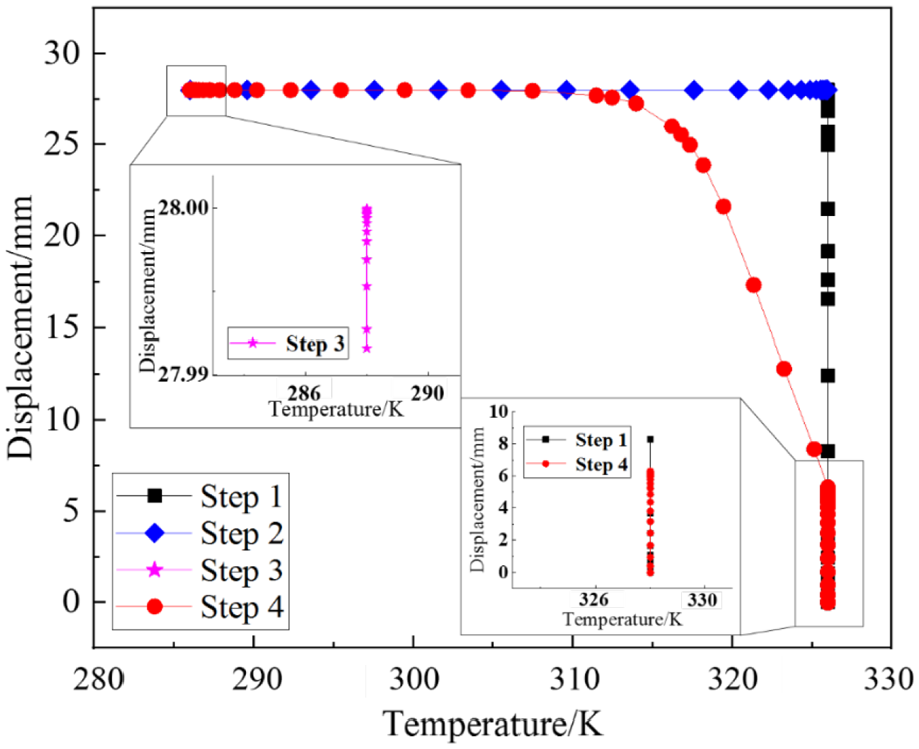
Shape memory process of F-M-1.
Equations (7) and (8) are used to represent the shape fixation ratio and shape recovery ratio, respectively. It can be calculated from the curve that the shape fixation rate and the shape recovery rate of the structure in the process of folding and deployment are close to 100%. It is also proved that the origami structure has excellent folding stability and deployability.
The FE simulation results of the other three modes are shown in Figure 9. The FE results in three modes also show that the origami structures can be folded and fixed, and automatically deployed by temperature response, which are also consistent with the experimental results.
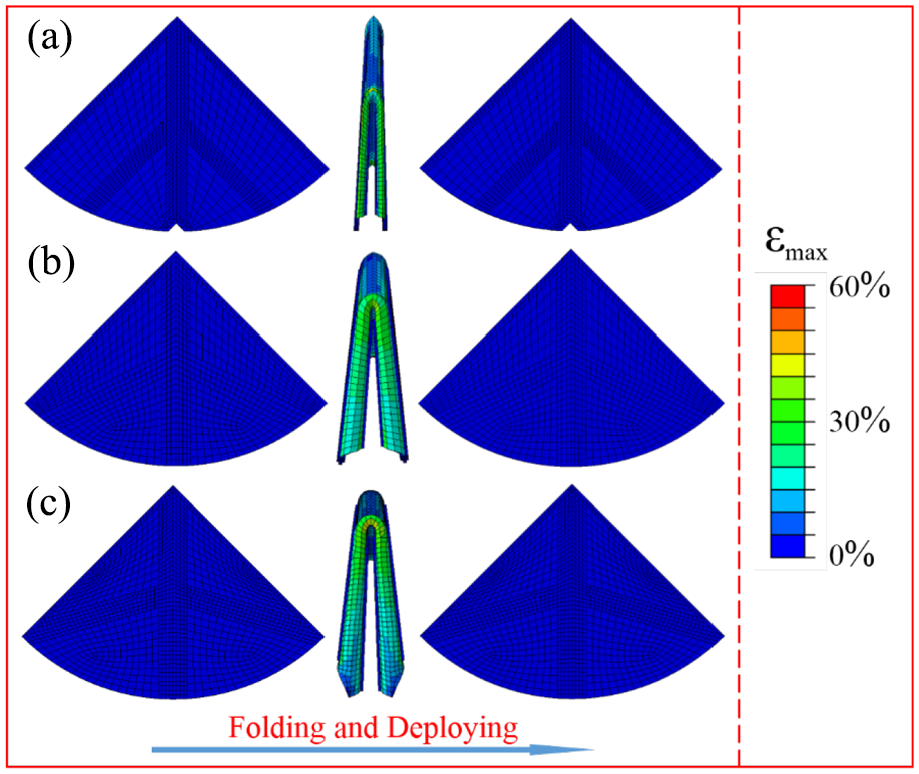
Folding and deploying process of (a) F-M-2, (b) F-M-3, and (c) F-M-4.
4.3. Expansion of the smart structures
For the models of F-M-2, F-M-3, and F-M-4, multi-level and large-scale models can be obtained through the expansion of the Miura-ori crease in the embedded fan pattern, in order to meet the design requirements of origami structures in practical application, such as different scales, folding, and deployment conditions for the deployable antenna and solar sail. The extended multi-level models are shown in Figure 10.
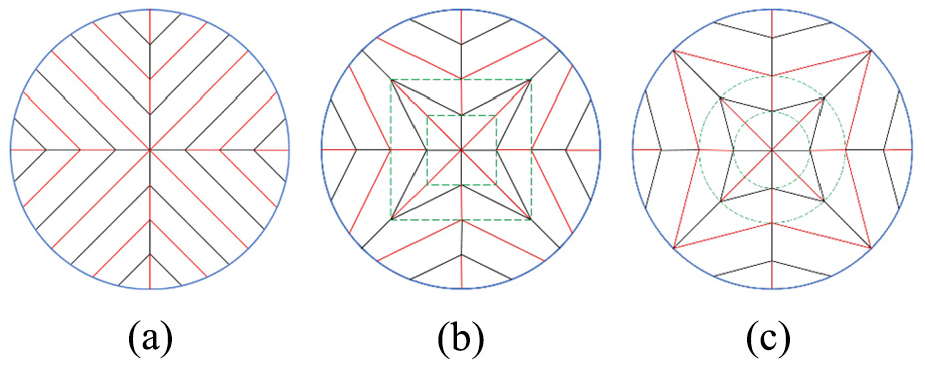
Expansion modes of (a) F-M-2, (b) F-M-3, and (c) F-M-4.
As an example, the folding process at high temperature, the fixed state of cooling, and the recovery process of heating shape of the expansion mode of F-M-2 are illustrated in Figure 11. It is also shown that the experimental and FE simulation results are in well agreement.
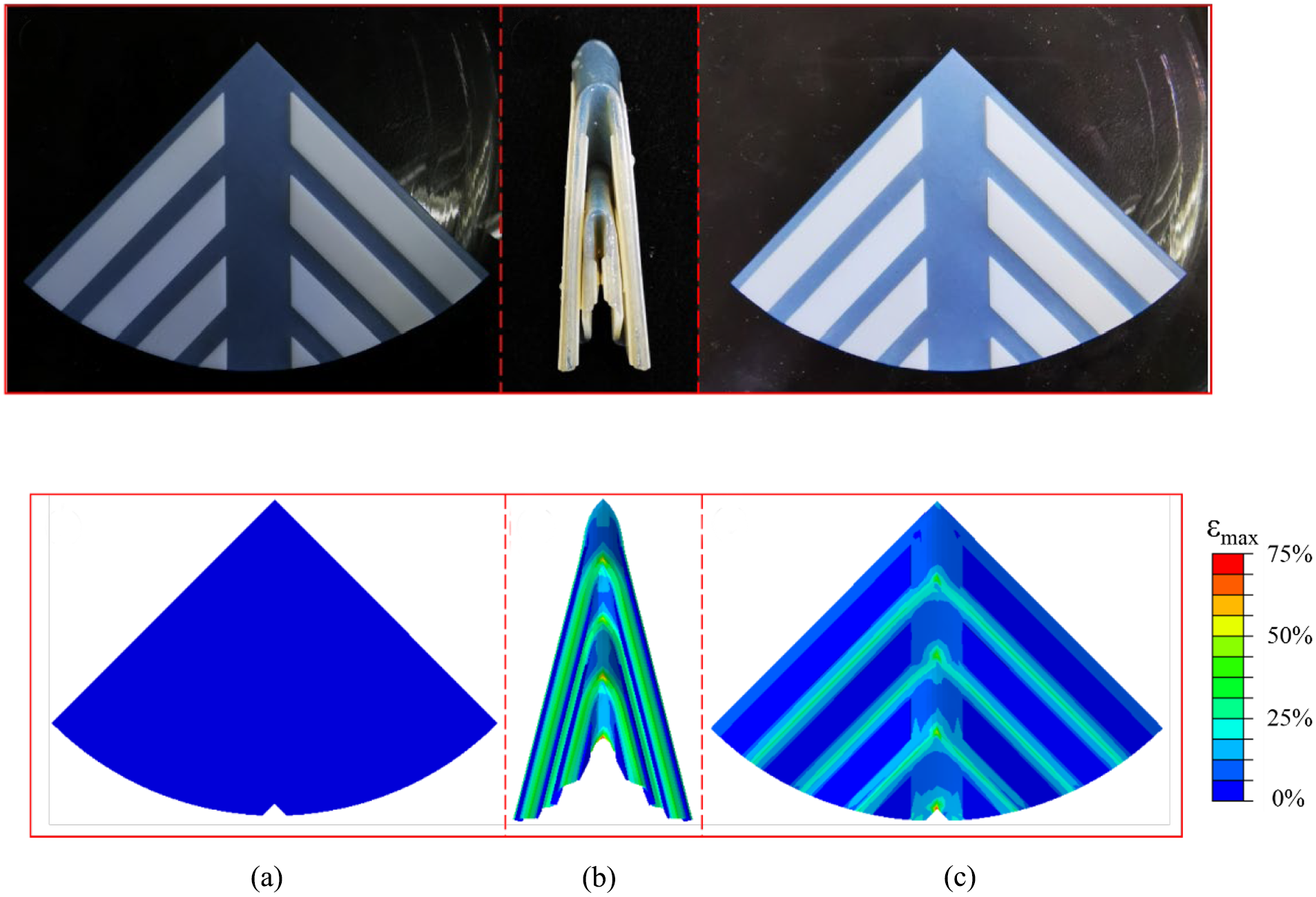
Experimental and FE results of expansion mode of F-M-2: (a) the initial state, (b) the folded fixed state, and (c) the deployment state.
5. Conclusion
In this article, four modes of circular origami structures by embedding the Miura-ori into the fan folding mode were presented. Two types of SMPs with different material properties were used to construct the creases and plate parts, respectively. The designed structure models were fabricated by 4D printing. The folding and deployment performance of the structures was studied by the experiment and FE simulation. Both results show that the structures have a large folding ratio, and the area reduction can reach 90% after full folding. Meanwhile, the structures have folding–deployment bi-stable state, with the folded fixed ratio and deployment recovery ratio both exceeding 90%. The deployment can occur spontaneously in response to the environment temperature due to the shape memory effect of SMPs. In addition, the structures can be extended to multilevel and large scale through the evolution of the embedded Miura-ori modes.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the National Natural Science Foundation of China (project nos 11932002, 11632005, 11772012, and 11872079), which is gratefully acknowledged.