
Abstract
Underwater propulsion of fishes have inspired many biomimetic structures. Generally, the bio-inspired structures mimics the flapping behaviour of various control surfaces/fins in fishes. The present study mimics the flapping behaviour using a piezoelectric structure. The system is analyzed as a fluid structure interaction problem. The dynamic behaviour of a cantilever beam surrounded by a bounded fluid domain open at top is analyzed. The structure is modeled as a Euler-Bernoulli beam and the fluid is modeled using potential flow theory. The influence of domain size on the wet natural frequencies of the system was analyzed. The dimensions of the fluid domain wherein the variation in wet natural frequencies becomes insensitive were determined. The influence of added mass on the wet natural frequency was parametrized based on Non-dimensional Added Mass Increment (NAVMI) factor. The NAVMI factors were observed to be relatively higher for lower wet modes of the structure. Therefore, the peizo-beam was analyzed by exciting the lower wet modes. The thrust generated at different excitation frequencies were determined using tip velocity of the cantilever beam following Lighthill’s analogy. The results from the study indicated that higher propulsive thrust was produced for lower modes of excitation of the structure.
1. Introduction
Locomotion of fishes and other aquatic creatures have been quite an intriguing research area for very long time, especially after investigations by Gray (1968), revealing dolphin’s ability to generate seven times higher thrust than their theoretical estimation. This had drawn attention of many researchers (Bainbridge, 1958; Fish, 2000; Lu et al., 2010; McHenry et al., 2003; Nauen and Lauder, 2002; Oeffner and Lauder, 2012; Triantafyllou and Triantafyllou, 1995) toward studying the propulsion mechanisms of aquatic animals. These have potential applications in marine research, pollution search, inspection of pipe, military operations, sea surveillance, etc.
In a typical fish shown in Figure 1(a), the flapping of caudal (tail) fin serves the primary means of locomotion. Based on the portion of fish body length that actively participates in the gait, their swimming modes could be broadly classified as shown in Figure 1(b) (Govardhan and Arakeri, 2012; Sfakiotakis et al., 1999). In anguilliform mode, a major portion of the body undergoes an undulatory motion while in carangiform and thunniform modes, the undulations are limited to the anterior (tail) end. The thrust generated by these modes could be calculated using resistive theory (Taylor, 1951, 1952) and reactive theory (Lighthill, 1960, 1970, 1971; Wu, 1961). The former is based on the resistive forces (lift and drag) acting on the tangential and normal direction of the body while the latter is based on the reactive forces generated by the exchange of momentum of the fluid displaced due to added mass effect. The anguilliform motion is common in elongated fishes such as eels, where a traveling wave over the body gradually pushes the fluid mass backward to achieve propulsion (Lighthill, 1970). However, in carangiform fishes such as Bluefish, pike, cod, salmon, etc., these wave undulations are confined to the tail region (one-third of the body length) such that most of the anterior body remains inflexible. Since most carangiform fishes have slender caudal fins, the Lighthill’s reactive theory (Lighthill, 1971) based on elongated body assumptions could be employed to calculate the thrust. On the other hand, the thunniform swimmers including tuna, dolphins, and sharks have lunate tails with high aspect ratio that are not slender in nature. The reactive forces generated by these fishes has been calculated by Wu (1961).
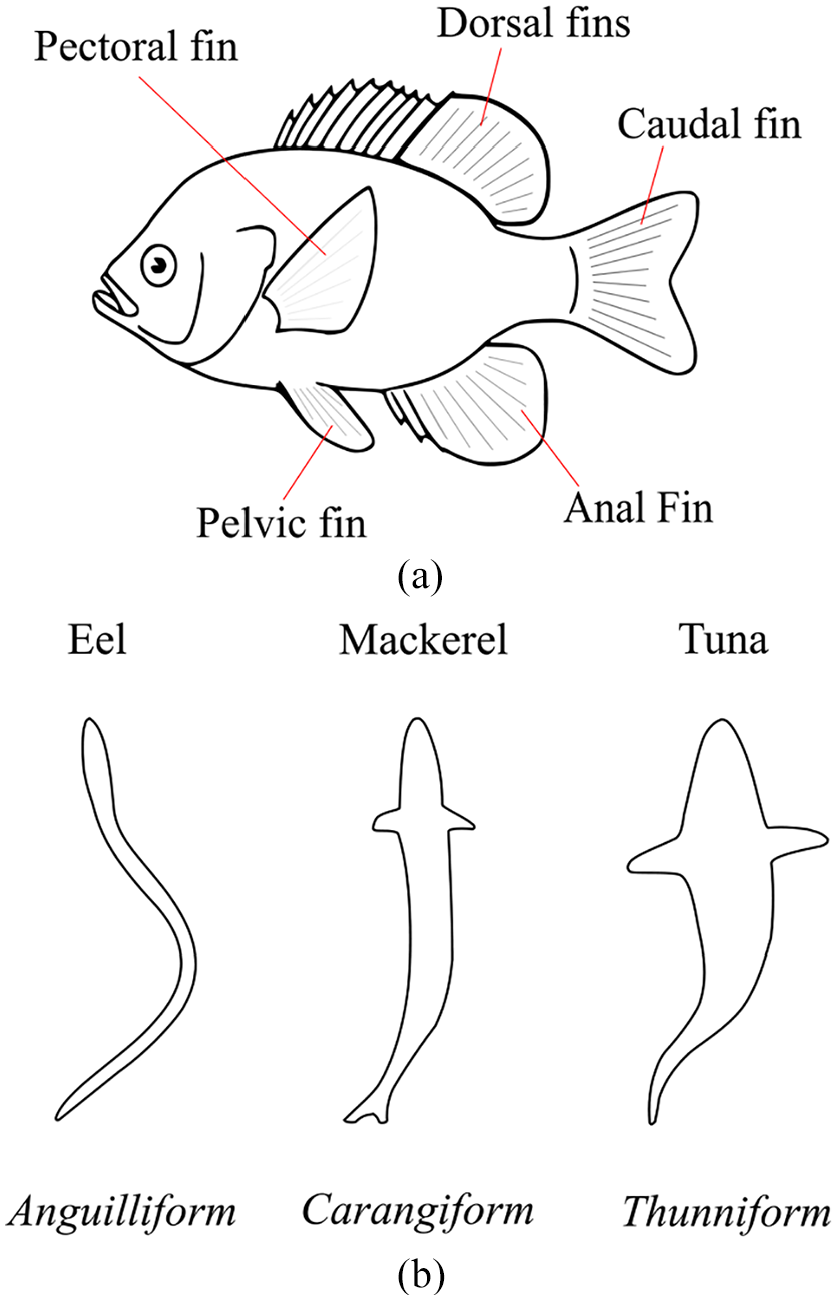
Locomotion of a typical fish: (a) fish anatomy and (b) caudal fin based locomotions
The flapping motion could be mimicked by vibration of piezo-actuated flexible structures such as Macro-Fiber Composites (MFC). Erturk and Delporte (2011) experimentally investigated the thrust generated by MFC bimorph configurations with and without a passive fin at the free end. Both the configurations were harmonically excited over a range of frequencies spanning the first two modes of vibration. The presence of a passive fin was observed to produce higher thrust for a wider band of frequencies by reducing the bandgap between the natural frequencies. Cen and Erturk (2013) carried out an experimental and theoretical study on a MFC bimorph cantilever beam. The hydrodynamic effect of viscous damping and the added mass was incorporated using Sader’s (1998) theory. Using a single-mode formulation, the tip (free end) velocity frequency response of the structure was theoretically determined and experimentally validated for harmonic excitations close to the fundamental natural frequency. The correlation between the experimentally obtained tip velocities and mean thrust values were shown to comply with the Lighthill (1960) for quiescent water condition. The study is however limited to a lower range of excitation frequencies and does not discuss the thrust generation at higher resonance modes. In an alternate approach, Shahab and Erturk (2016) employed Morison equation to incorporate the hydrodynamic effects. The drag and the inertia coefficients in the Morison equation were calculated experimentally and their values were found quite similar for the beams with same aspect ratios. The tip velocity frequency response estimated by the model was experimentally validated for three MFC bimorphs having different aspect ratios.
Thrust produced by an oscillating body in fluid is dependent on its amplitude, shape of deformation, and the fluid displaced (Demirer et al., 2021). The thrust generally increases with increase in the amplitude of body oscillation. Large deformation involving MFC, induces material (due to the ferroelasticity), and geometric non-linearity (due to non-linear strain) (Tan et al., 2018). As the actuation voltage is increased, the resonance response indicates a softening behavior due to non-linearity. An additional hydrodynamic correction (Tan and Erturk, 2018) need to be incorporated for MFC oscillating underwater. The inertia coefficients of the Morison’s equation increases proportional to the amplitude of oscillation. For the current study these factors are not considered.
In the past, various literatures have analyzed the underwater vibration of a cantilever as a fluid-structure interaction problem using potential flow theory. The main challenges in these studies are to determine the velocity potential functions satisfying the boundary value problems. Literatures such as Fu and Price (1987), Liang et al. (2001), and Ergin and Uğurlu (2003) employ boundary element approach whereas others like Shabani et al. (2013) and Liao and Ma (2016) utilize eigenfunction expansion technique to express the potential functions. Shabani et al. (2013) presented a two-dimensional model of a micro-beam vibrating in a bounded, incompressible, and inviscid fluid domain. The added mass components were found higher for lower modes. It was further shown that the higher modes play a more vital role in denser fluids. The study assumed the fluid structure interaction boundary to be fixed at mean position of the micro-beam. Abdollahi et al. (2016) provided a more accurate model by considering the fluid-structure interface to be dynamic as the beam undergoes deflection. The natural frequencies were found to be much closer to experimental results. Liao and Ma (2016) investigated the vibration characteristic of an elastic plate placed at the base of a three-dimensional rectangular tank filled with inviscid compressible fluid. The wet natural frequencies were found approaching constant values for larger fluid domain size. The natural frequencies and the mode shapes obtained for the coupled system using high value of sonic velocity were shown comparable to that of incompressible fluid theory (IFT). For lower values of sonic velocity, the compressibility leads to some additional modes generated particularly at higher resonance frequencies, which otherwise were not present in the incompressible fluid.
The current study proposes a flexible cantilever structure vibrating similar to the carangiform motion. A flexible bimorph structure is actuated to undergo vibration and mimic the flapping motion of the caudal fin. A potential flow is assumed for calculating the hydrodynamic effects. The influence of the fluid domain length on the wet natural frequencies has been studied. For various excitation frequencies of the piezo actuated beam, the tip velocity of the bimorph is determined and the thrust generation is estimated.
2. Model description
The oscillations of a structure submerged in fluid results in an exchange of energy between the fluid and structure. Understanding this hydrodynamic behavior of the flexible member can provide insights on the propulsive thrust generated. A theoretical model is developed for a flexible fin flapping underwater in a tank bounded from all sides except top as shown in Figure 2. The structure is modeled as a cantilever beam using Euler-Bernoulli’s assumptions. The governing equation for the transverse vibration of an undamped beam in fluid is given by

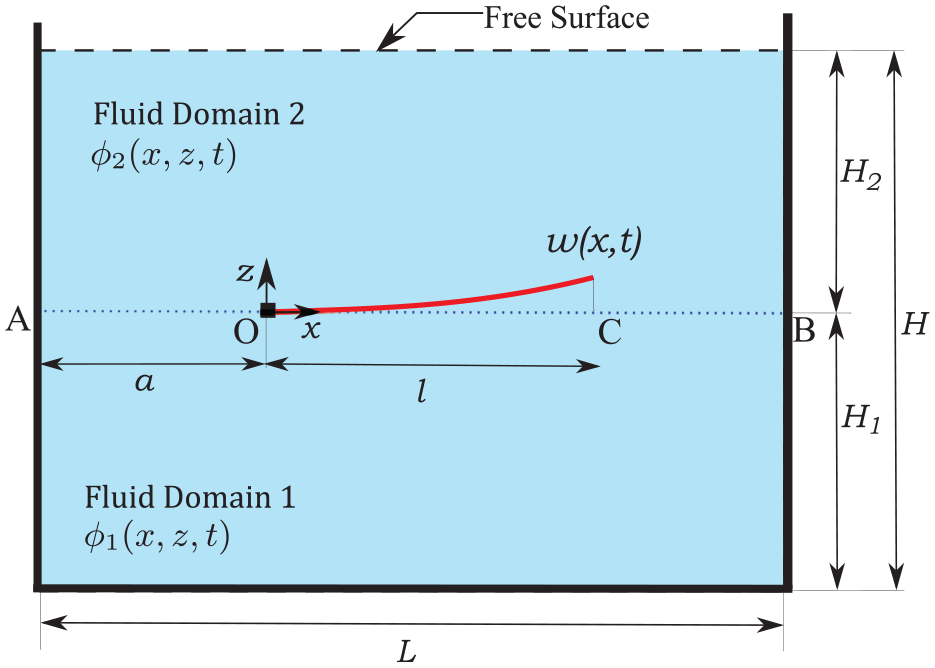
Schematic of a flexible structure submerged in fluid.
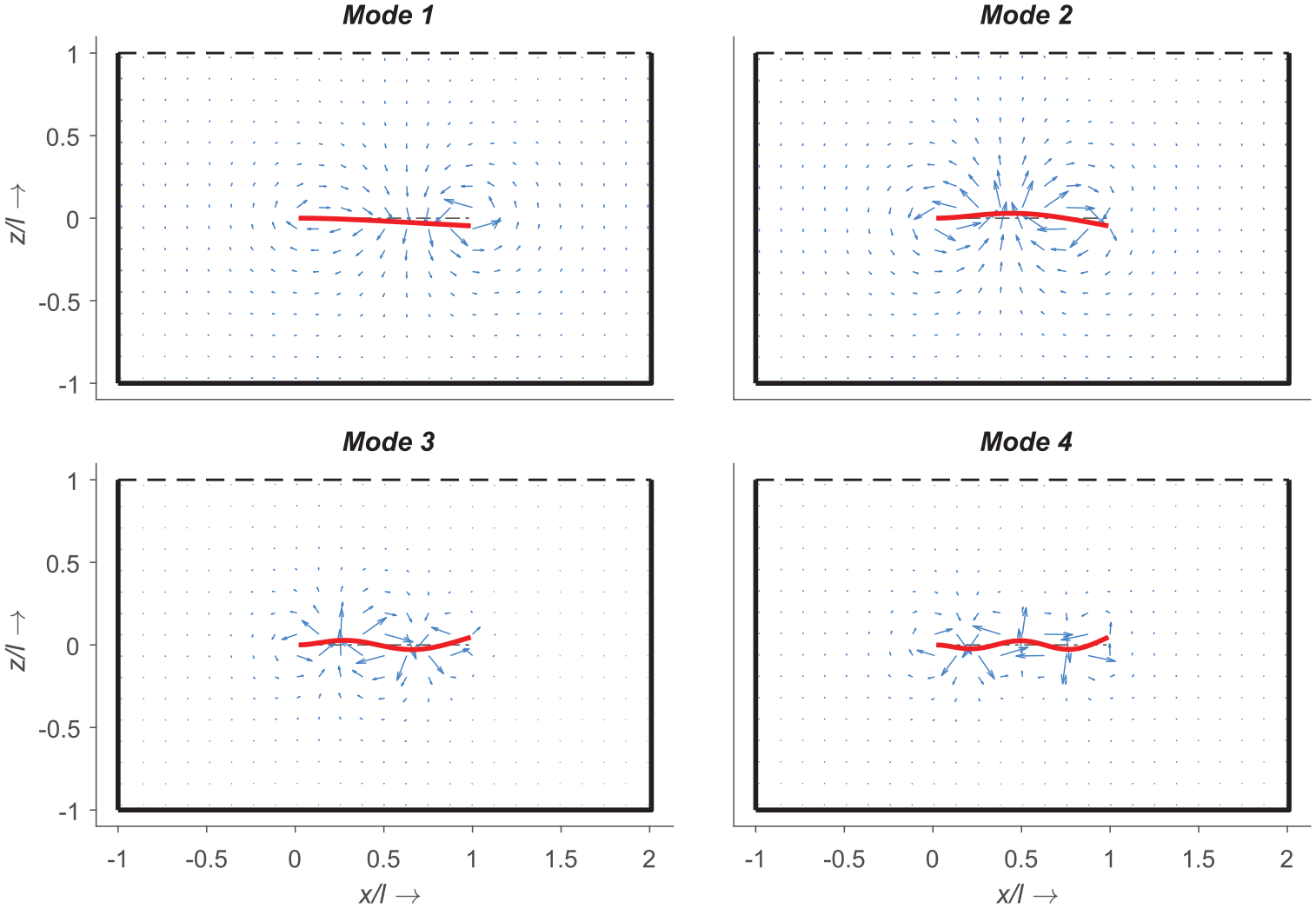
Structure mode shapes and the corresponding fluid velocities quiver plot for
where

where

where

where,
2.1. Fluid-structure interaction
For modeling the underwater vibration of the structure, the surrounding fluid is assumed as inviscid and incompressible. The fluid body is modeled as two separate regions (Shabani et al., 2013) using velocity potential functions


for the lower and the upper domains respectively.
The fluid domain is assumed bounded by impermeable walls on three sides—left, right, and bottom. Accordingly, the kinematic boundary conditions are imposed as

where
Assuming zero wave elevation along the free surface at top of the second fluid domain, the dynamic boundary condition gives (Fu and Price, 1987)

Equations (4)–(6) are solved using variable separation method. For


where,

and

are the eigenfunctions,
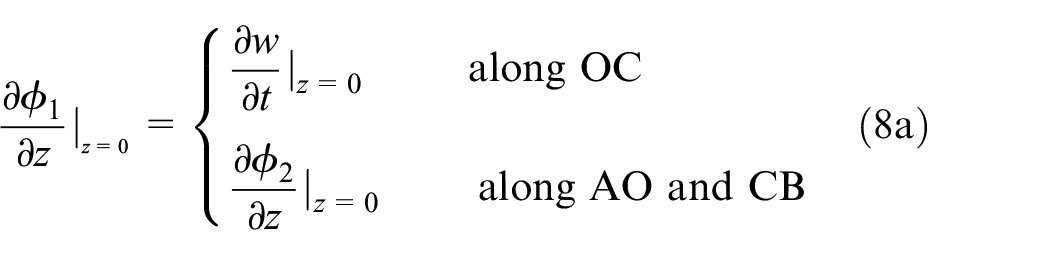
Kinematic and dynamic boundary conditions are imposed across the two fluid domain interfaces. A body boundary condition is imposed at the fluid-structure interface OC. In addition, for the rest of the fluid domain interface velocity and the pressure continuity conditions are imposed. This results in

Multiplying with


where



for
During the underwater vibration of the submerged structure, the disturbance of the surrounding fluid imposes a hydrodynamic loading on the structure. This force could be expressed as the difference in pressures exerted on the structure by the lower and the upper fluid domains respectively. Using linearized Bernoulli’s expression, the modal hydrodynamic force acting per unit length of the structure is obtained as

where

where


Using equations (4) and (16) in equation (3), the added mass effect is included in modal coordinates. The governing equation for the underwater vibration is obtained as

where,
Next, the fluid-structure interaction problem was carried on a fully submerged structure with properties given in Table 1. The flexural rigidity of the structure could be obtained as
Properties of the flexible structure (Cen and Erturk, 2013).
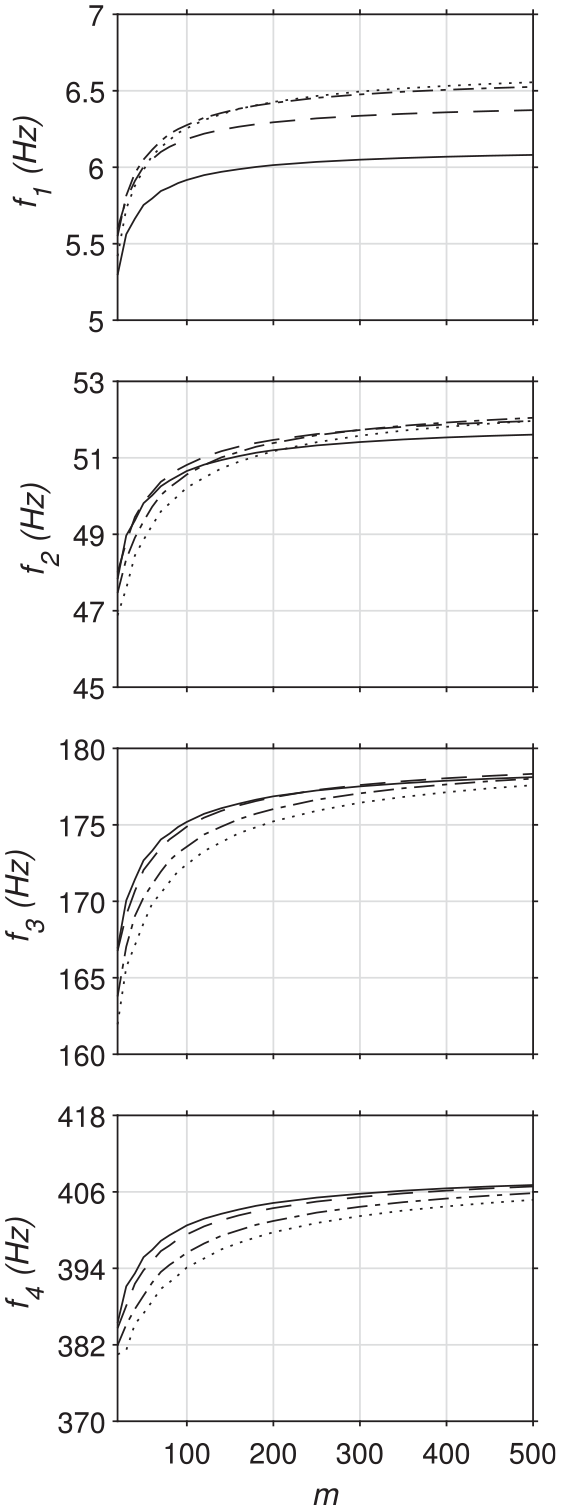
Convergence on number of potential functions (solid line:
A sensitivity analysis was carried out to study the significance of fluid domain size on the wet natural frequencies. Figure 5(a) indicates that the natural frequencies approach a constant value as the domain length relative to the beam increases. The theoretical results are compared with the 2D simulation carried out in COMSOL Multiphysics. In comparison to COMSOL results, the theoretical model underestimates the natural frequencies with 2%–5% discrepancy. This could be primarily due to the current model assuming the body-boundary condition along a fixed boundary unlike dynamic mesh adapted in the COMSOL.
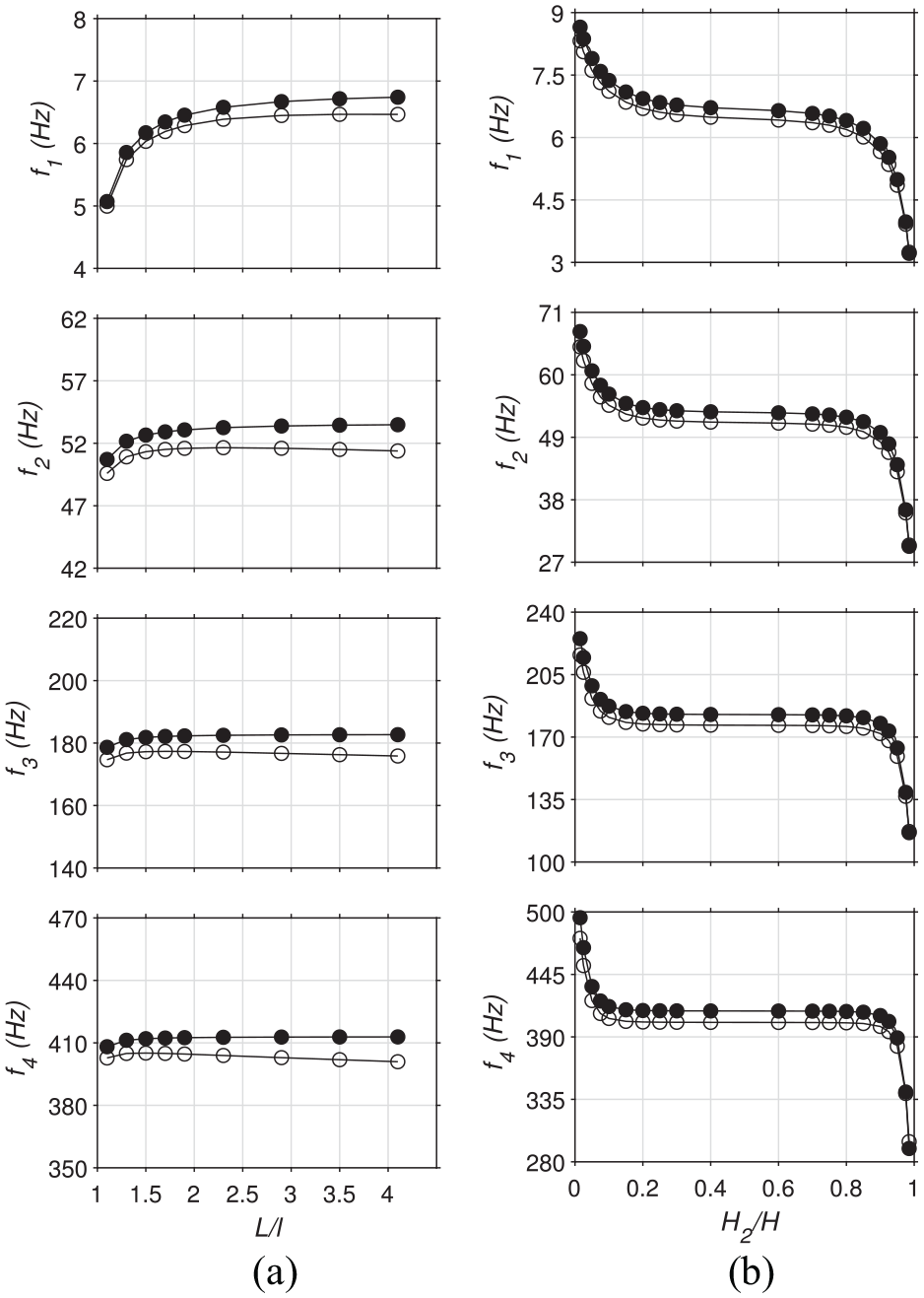
Parametric study on the first four wet natural frequencies. (°, analytical and •, COMSOL): (a) effect of domain length (L/l) at H1/l = H2/l = 2 and (b) effect of depth of submergence (H2/l) at H/l = 2, L/l = 3.
The depth of submergence of the beam is a key parameter which can vary depending on the mission requirement. Therefore an analysis on the variation in natural frequency with depth of submergence was carried out. Figure 5(b) shows a parametric study on the variation in natural frequency with the depth of submergence. The natural frequencies were found to be insensitive to the depth of submergence when the foil was oscillating away from the domain boundaries as predicted from the previous literature (Fu and Price, 1987). The influence of added mass on the natural frequencies were significant when the beam was oscillating close to the free surface or bottom boundary. The variation in natural frequencies with depth is higher when the foil is flapping close to the bottom surface. This asymmetry in the trend could be due to the difference in boundary conditions at the top and bottom.
The first four mode shapes of the structure along with the instantaneous velocity quiver of the fluid particles are shown in Figure 3. The direction and length of each arrow represents the relative direction and magnitude of the velocity of the fluid particle located at the root of the arrow. The velocity quivers has maximum length near the vicinity of the structure with an angle following the body-boundary and the continuity relations. In coherence to the sensitivity analysis discussed earlier, the quiver plots illustrate that the fluid oscillations stays in the vicinity of the structure and are more prominent in a fluid region of dimensions,
The influence of added mass on the natural frequencies of the fluid-structure coupled system could be parametrized as non-dimensional added virtual mass increment (NAVMI) factor which is defined as the ratio between the kinetic energy of the fluid and the kinetic energy of the structure (Amabili et al., 1996). The NAVMI factors are the diagonal entries of the NAVMI matrix given as (Kwak and Yang, 2013)

where,
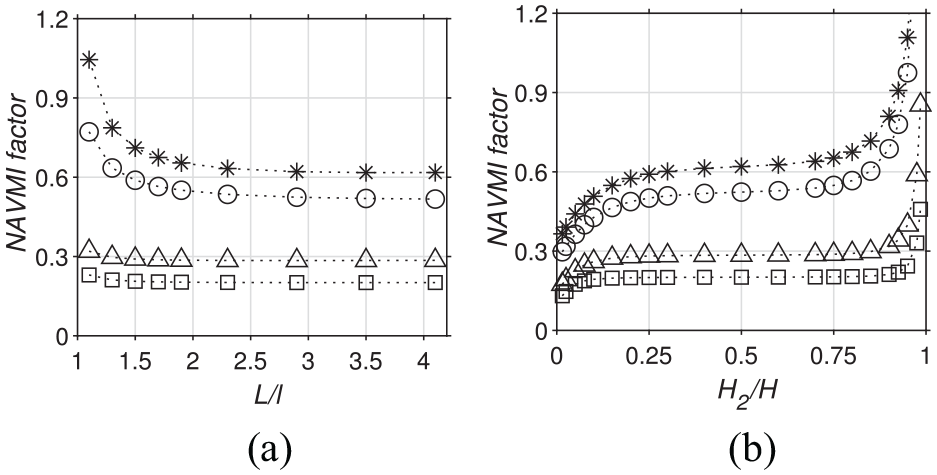
Parametric study on the first four wet natural frequencies (* mode 1, ° mode 2,
The results from the study indicate that significantly higher NAVMI factor is obtained for the first and the second mode of the submerged structure. Hence, the mean thrust generated due to the reactive forces could be maximum when the structure is excited at these particular modes. This could be achieved by actively controlled flapping of the structure by means of piezoelectric effect.
2.2. Active thrust generation
For controlling the flapping motion of the submerged structure, a piezo-actuated bimorph configuration is employed. The proposed bimorph is made of two MFC strips (M8528-P1, Smart Materials Corp.) sandwiched together with no substrate. The governing equation for the transverse vibration of a typical bimorph configuration shown in Figure 7 when submerged in a fluid medium could be obtained by accounting the converse piezoelectric effect (Erturk and Inman, 2011) as

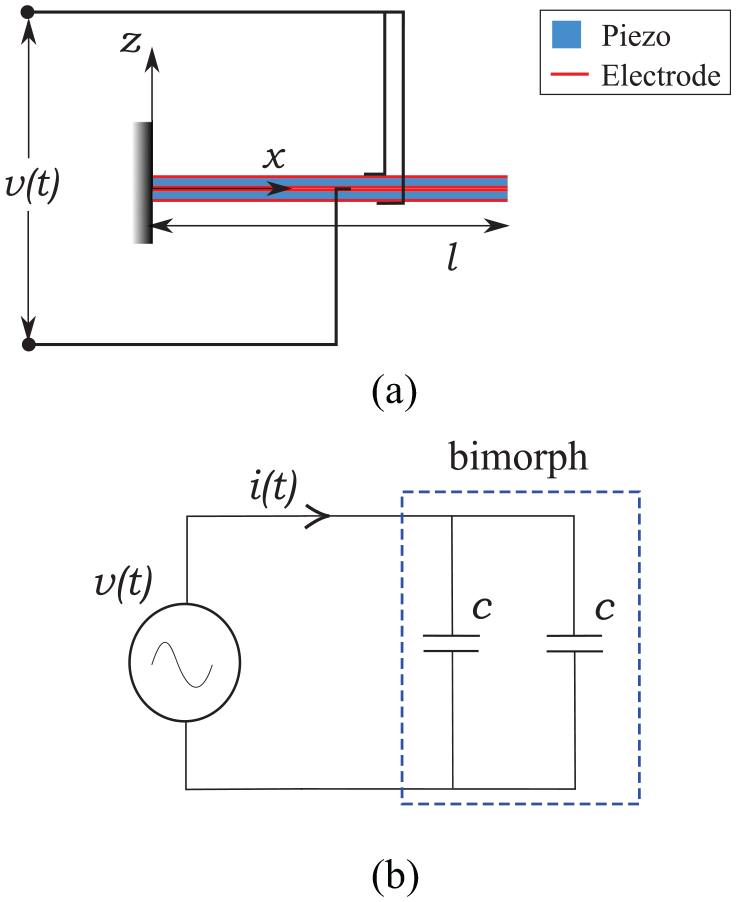
Piezoelectric bimorph structure: (a) bimorph configuration and (b) electrical Schematic.
where

where
The constitutive relation for the direct piezoelectric effect gives

where
The structural and geometrical parameters of the bimorph are considered same as mentioned in Table 1. The electro-mechanical coupling and capacitance of the MFC strips are adapted from the product datasheet as

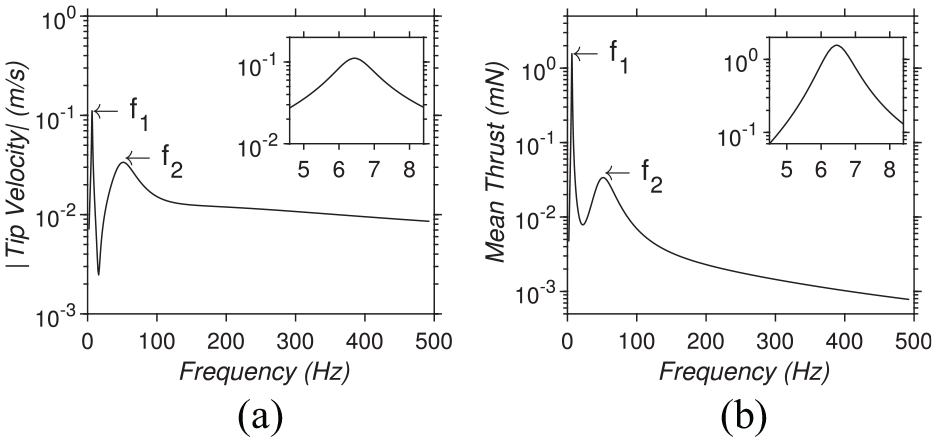
Response of the bimorph when excited using a harmonic voltage of amplitude 100 V for a domain size of
where
3. Conclusion
A theoretical model of a flexible flapping underwater foil was developed. A convergence study on the first four wet natural frequencies were carried out and an optimal number of potential functions was proposed. The simulated natural frequencies were compared with COMSOL Multiphysics, the theoretical results showed good compliance with a discrepancy of less than 5%. A parametric study was carried out to determine the influence of fluid domain length relative to the flapping foil and depth of submergence on the wet natural frequencies. The added mass effect were observed to more pronounced for shorter domain length and closer to the domain boundaries. The added mass effect on the flapping motion for various natural frequencies were quantified using NAVMI factor. The values of NAVMI factors were found relatively higher for the first and second resonance modes. A theoretical model of piezo-actuated bimorph flapping foil was developed to actuate the flapping foil at resonant wet modes. The thrust generated was estimated using Lighthill’s analogy for the underwater flapping foil. The magnitude of the mean thrust generated by the flapping motion was much larger when the bimorph was excited at the natural frequencies which produced high NAVMI factor. The results from the study indicates that by strategically tuning the excitation frequency of the piezo-actuated foil the mean thrust developed can be effectively controlled.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.