
Abstract
In this paper, the primary purpose is to have a complete understanding of the importance of fibers in dielectric elastomers due to the influence of fiber orientation in decreasing the applied voltage to simulate the structure and improving mechanical performance. Fibers will also reduce the chance of failure like Wrinkling instabilities and increase the response rate under electric displacement. Implementing the dielectric elastomers with anisotropic structure, despite their great potential, has not adequately analyzed in previous researches. Therefore, based on nonlinear continuum mechanics and large inelastic deformations, the constitutive relationships and equations governing the behavior of viscoelastic dielectric elastomers under harmonic electrical loading are extracted and analyzed in different states. The numerical results, such as phase and frequency-amplitude diagrams and the oscillation, illustrate the dynamic behavior of an anisotropic dielectric elastomer with different fiber orientations. To describe the viscoelasticity behavior of the material, hyperelastic models and the rheological model, are used in conjunction with electrical coupling. Using the theory of anisotropic dielectric elastomers, a geometrically nonlinear formulation under finite deformations is developed by the Euler-Lagrange equations and solved mathematically.
Keywords
1. Introduction
Today, with the advent of science in many fields, smart materials are also rapidly expanding and used in many devices (An et al., 2016; Bar-Cohen, 2004; Bar-Cohen et al., 1999; Su et al., 1999; Thomsen et al., 2001). The term “smart” can be defined as materials that can respond based on understanding the surroundings and conditions (Miriyev et al., 2017). Thus, polymers are no exception and exhibit different reactions to various stimuli such as temperature, electric field, and magnetic field (Bar-Cohen, 2005). Electroactive polymers (EAPs) are smart polymers that deform and resize in response to external stimuli and also generate electricity (Bar-Cohen, 2002, 2007). This extraordinary ability makes these polymers also used as actuators or sensors. EAPs have fast response time, lower density, and higher flexibility compared to shape-memory alloys and also have less density and electrical stimulation than electroactive ceramics (Kornbluh et al., 1998). EAPs are divided into two main groups according to the stimulation mechanism: Electronic EAPs and ionic EAPs (Pelrine et al., 2000). It should also be noted that electric field or coulomb forces stimulate electronic EAPs, whereas, in ionic EAPs, ion movement, and diffusion are the primary triggers (Jo et al., 2011; Shahinpoor and Kim, 2001; Watanabe et al., 2014). Among EAPs, dielectric elastomer (DE) is one of the most widely used and successful types of EAPs that has been much studied and investigated (Brochu and Pei, 2010; He et al., 2009; Lampani, 2010; Oates et al., 2017; O’Halloran et al., 2008; Pelrine et al., 2002; Romasanta et al., 2015; Tavakol et al., 2014).
Dorfmann and Ogden (2005) investigated the nonlinear behavior of dielectric materials. They extracted nonlinear electro-elasticity relationships based on the relationship between the electric field and mechanical deformation and analyzed the boundary conditions under the large deformation theory. The structural equations of the DE were analyzed using free energy function and electric field in both Eulerian and Lagrangian states to investigate the rate of strain. Goulbourne et al. (2005) developed the mechanistic relationships of DEs associated with large-scale deformation, nonlinear behavior, and electrical effects using Maxwell-Faraday and nonlinear elasticity relationships. In this research, an analytical model was used to study the behavior of DE under the influence of applied voltage changes, initial tension, and external pressure. Mockensturm and Goulbourne (2006) modeled and analyzed the behavior of a viscoelastic spherical dielectric thin film with both mechanical and electro-static pressure. Cauchy stresses were calculated based on invariants of the stretch, and the hyperelastic Mooney-Rivlin model was employed to investigate the structure’s behavior. Liu et al. (2009) proposed DE’s behavior using theoretical relations and experimental results. The strain values were measured in different electric fields and investigated by Maxwell stress relation. In the case of large deformations, both the experimental results and the finite element analysis had been compared. It should be noted that the viscoelastic effect had also been neglected. Zhu et al. (2010b) studied the resonant behavior of a thin layer of DE in the form of a circular ring under pressure and applied voltage. Equilibrium equations were derived using nonlinear field theory for analysis and investigation of laboratory conditions. It was observed that as the tension, pressure, or voltage changes, the natural frequencies also change. Applying sinusoidal pressure and voltage also resulted in harmonic and super-harmonic resonance. Chen et al. (2017) extracted the governing equations using the Helmholtz free energy function of DE and the thermal effects. Examining the results revealed that the deformations obtained from the quasi-static model and the dynamic model are the same at the beginning of excitation and then change with increasing stretch rate. When the DE was excited by a low-amplitude sinusoidal voltage, the stretch-induced by the quasi-static and dynamic model were the same. Still, high amplitude, the results were different. Various models were also utilized to simulate the viscoelastic behavior of DE.
To have a better understanding of the nonlinear oscillation of anisotropic dielectric elastomers (ADEs) in different situations, the dynamic behavior of DEs, a vital parameter to use in acoustic actuators, is examined. It has attracted much attention (Sheng et al., 2013; Zhang et al., 2015). Therefore, Sheng et al. (2014) studied the natural frequency and nonlinear dynamic property of a DE considering the damping effect. The proposed free energy model was based on the Gent model, and a perturbation technique was applied to derive the nonlinear governing equation. A mathematical procedure was introduced by Zhu et al. (2010a) to develop the dynamic behavior of a DE balloon under sinusoidal voltage to calculate the nonlinear frequencies. The dynamic response of a DE was studied by Kumar and Sarangi (2018) with analytical modeling. The standard Euler-Lagrange method, as well as the Mooney-Rivlin function, was used to study the dynamic response of DE under harmonic electrical loading.
Due to the widespread use of ADEs in artificial muscles and smart micro-robots, it is essential to have a better understanding of ADEs (Ahmadi and Asgari, 2020; Jiménez and MacMeeking, 2016; Su et al., 2019). Therefore, in recent years, there has been a large increase in research activity on these types of structures, and many studies have been carried out to analyze the properties of ADEs. Yong et al. (2012) developed the electromechanical instability of ADEs with an electric field and axial stress. By applying the Neo-Hookean model, the Cauchy-Green deformation tensor, and the Helmholtz energy, the governing equations for ADE structure had been extracted, and an analytical procedure was used to solve. The results showed that by increasing the anisotropic parameter, the stability of the dielectric elastomer was significantly increased. Subramani et al. (2014) focused on improving the performance of DE with anisotropic properties by improving the dielectric constant. They showed that employing the fibers and considering the elastomers as composite structures lead to anisotropic behavior and improve their efficiency and response rate. In 2018, they also showed that adding the relatively high strength fibers to the matrix of a dielectric elastomer resulted in increasing energy absorption, improving mechanical performance, and increasing the ADE response rate under the electrical field (Subramani et al., 2018). The acrylic elastomer used in this study is VHB4905, which is commonly used. Hossain and Steinmann (2018) introduced a new structural relationship for electroactive polymers with anisotropic properties by fiber diffusion. To formulate the relationships, the laws of thermodynamics were used. To illustrate the performance of cylindrical structures with axial symmetry under electromechanical coupling loading, a non-homogeneous boundary value problem was firstly investigated.
In this paper, the nonlinear mathematical formulation of an ideal ADE is developed to study the electrical response of a viscoelastic ADE membrane. Because of the complexity of governing equations, the effects of viscoelasticity are neglected by most of the researchers. In contrast, most of the DE materials like VHB show strong viscoelasticity through the thickness direction. Hence, the model of viscoelasticity is represented by a rheological model of springs and dashpots associate with both the Neo-Hookean model and the Mooney-Rivlin model for uniaxial tension and pure shear state. Also, most of the researchers have focused on the study of the behavior of isotropic DE employing the finite element analysis. At the same time, an extensive complete theoretical model including the effect of viscoelasticity for both important hyperelastic material models based on virtual work with fiber-reinforced DEs could not be found in literature, to the best of the authors’ knowledge. The kinematic and potential energy based on the Euler-Lagrange equation is used to derive the nonlinear vibration equation for various conditions. Consequently, by solving the governing equations, the dynamic responses of ADE are examined. The phase diagrams and dynamic vibration and oscillation of the system under harmonic and constant electric loading are also studied. Results show that increasing the electric field has a strong effect on the polymer molecules and makes them less closely aligned with each other. Moreover, the jump of oscillating amplitude at specific values of the frequency of excitation is also observed, which shows the hysteresis phenomena.
2. Nonlinear continuum formulation
In this part, an electro-elastic solid continuum is considered occupying a region
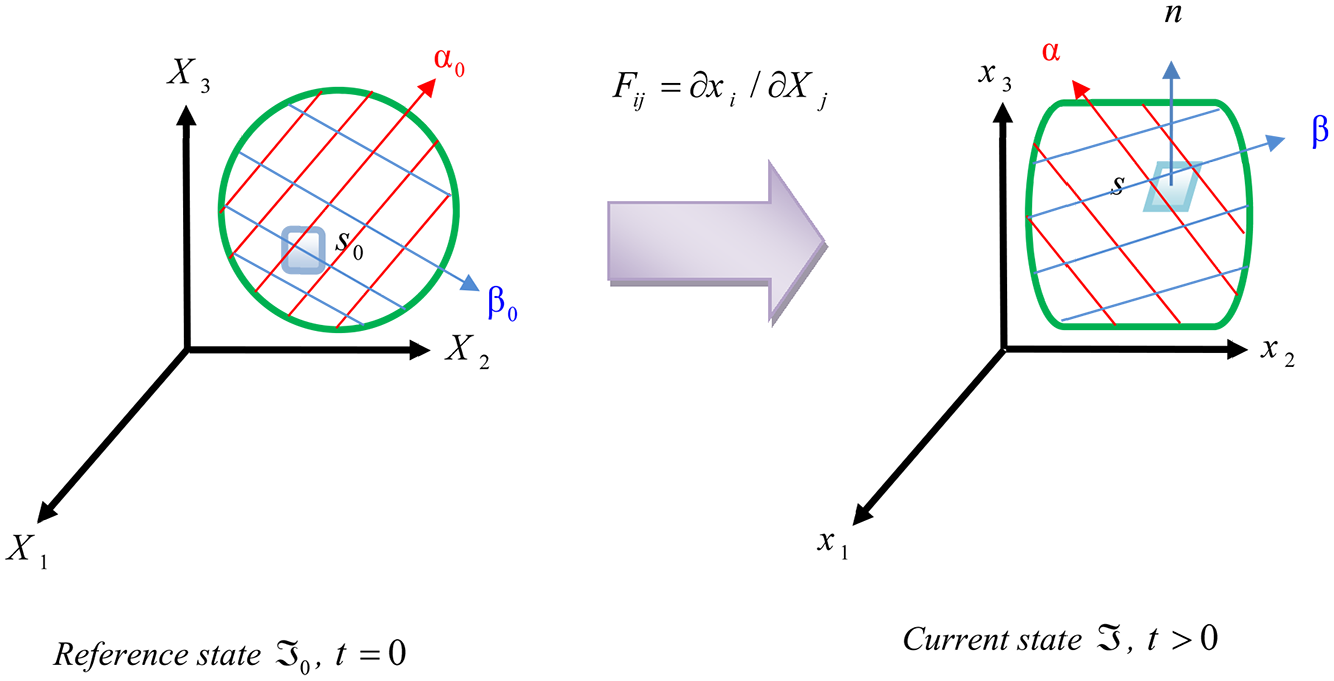
A continuum motion description of a fiber-reinforced DE.
The deformation gradient tensor is used to map a line element from the reference state to the deformed state and is defined as

where J is the Jacobian determinant of the deformation gradient taken
The Maxwell’s equations can be represented in the following forms. At the same time, there are no electric charges and magnetic fields (Dorfmann and Ogden, 2006)

Here,

where
In the case of vacuum or free space, the

The above equations were based on the current state. The presented various electric quantities may transform from the spatial configuration


in which,


where
According to the equations (7) and (8), the Lagrangian form of an electric field, electric displacement, and the polarization vector is denoted by

Therefore, like equation (2), the Maxwell equations will have resulted as

The other form of equation (3) can be obtained using equation (9) as follow

For an ADE the Helmholtz free energy function

Here,
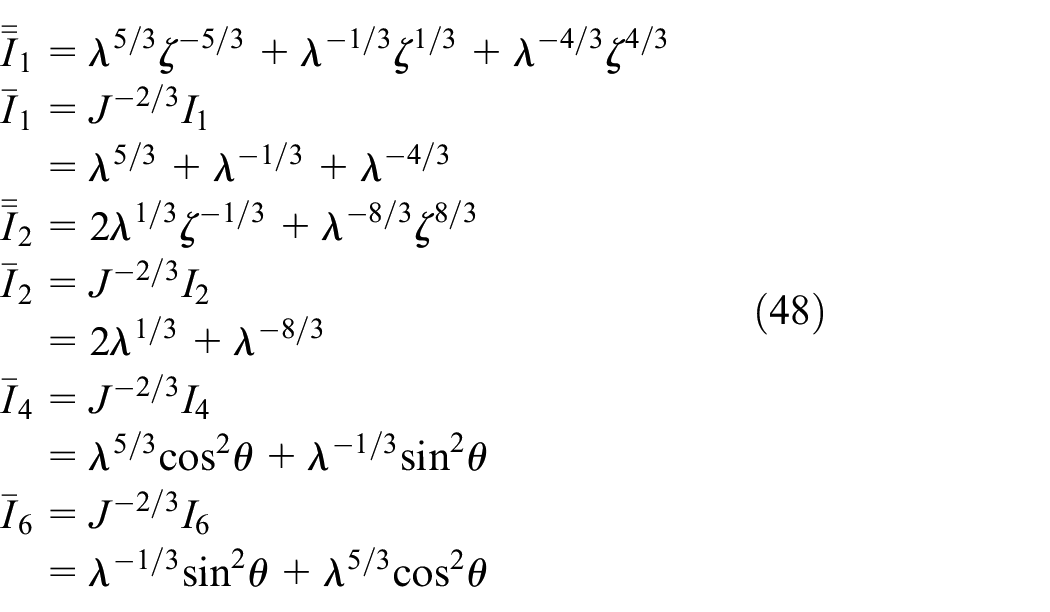
The free energy function in equation (12) can be developed as a function of the set of invariants

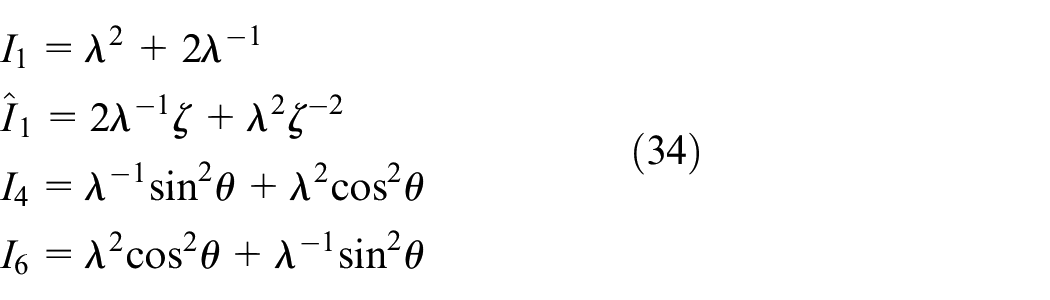
These invariants are given as
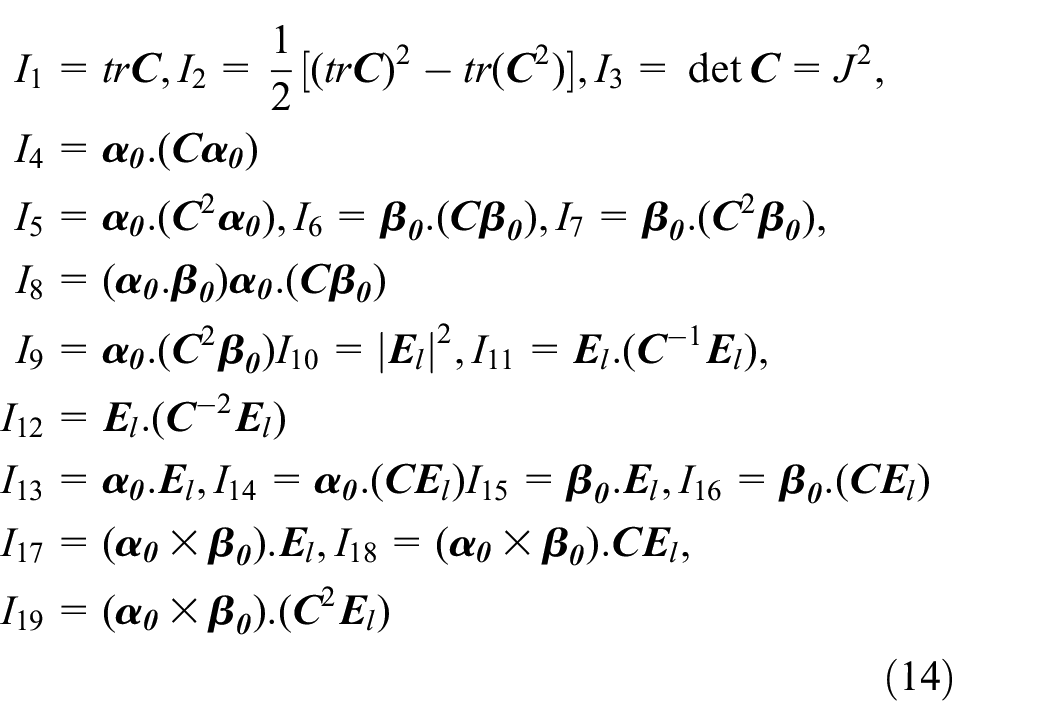
The complete form of the free energy function is presented in equation (13). The principal invariants of the stress are
The initial direction of unit vectors

in which
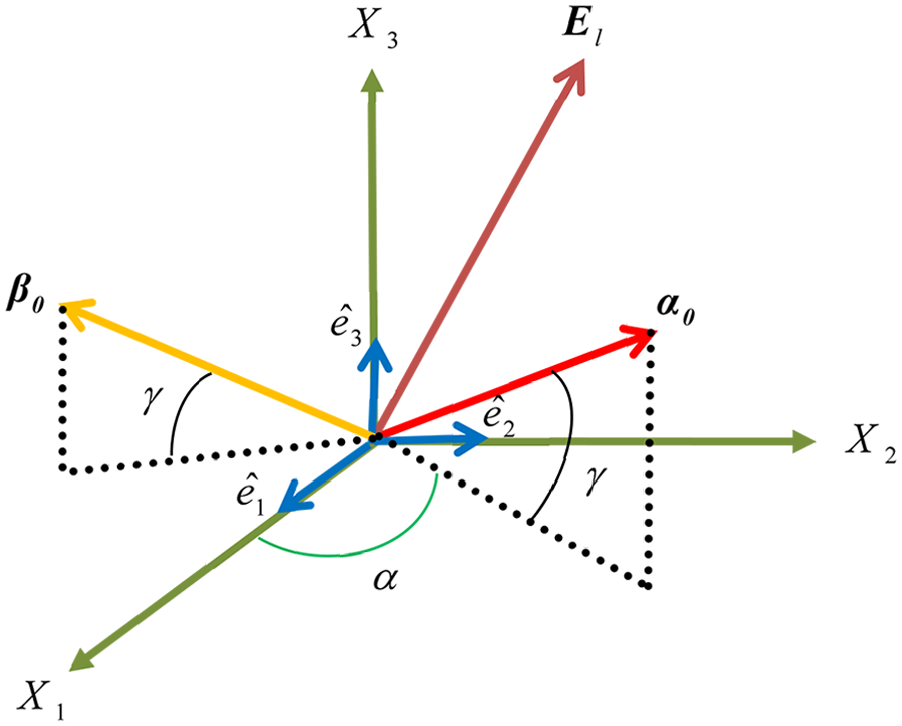
The orientation of unit vectors
The free energy function for an ADE is composed of the isotropic

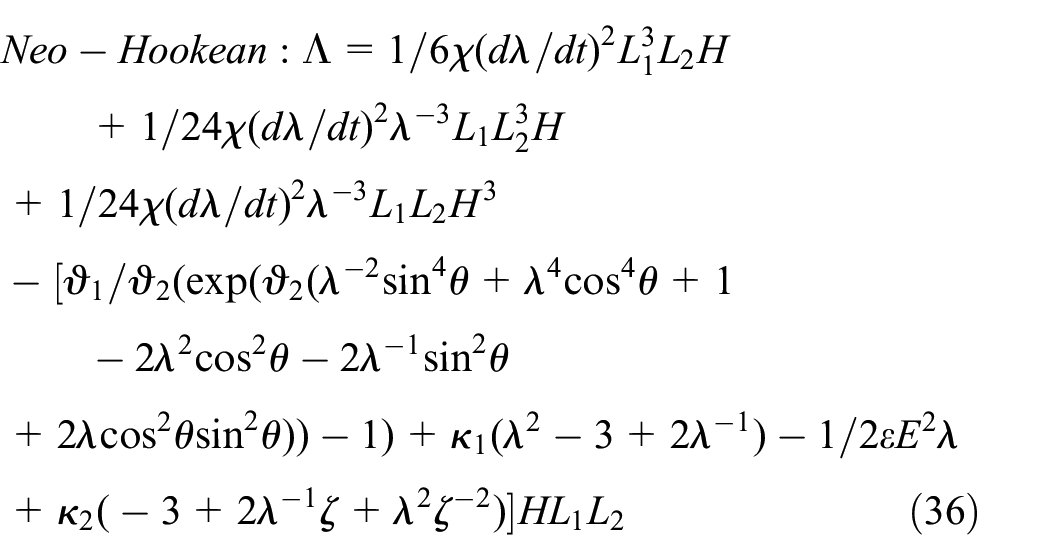
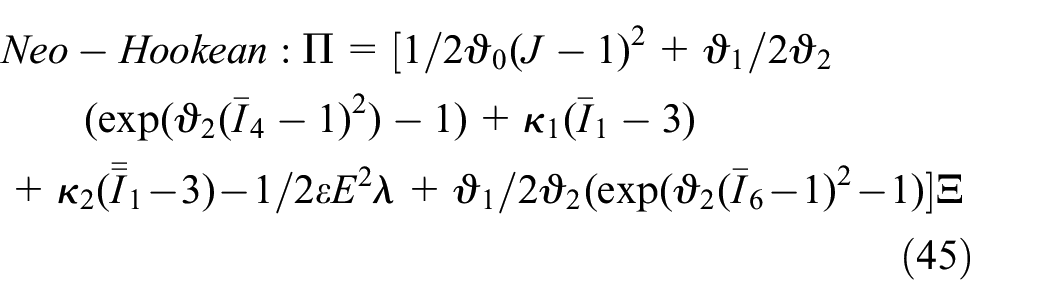
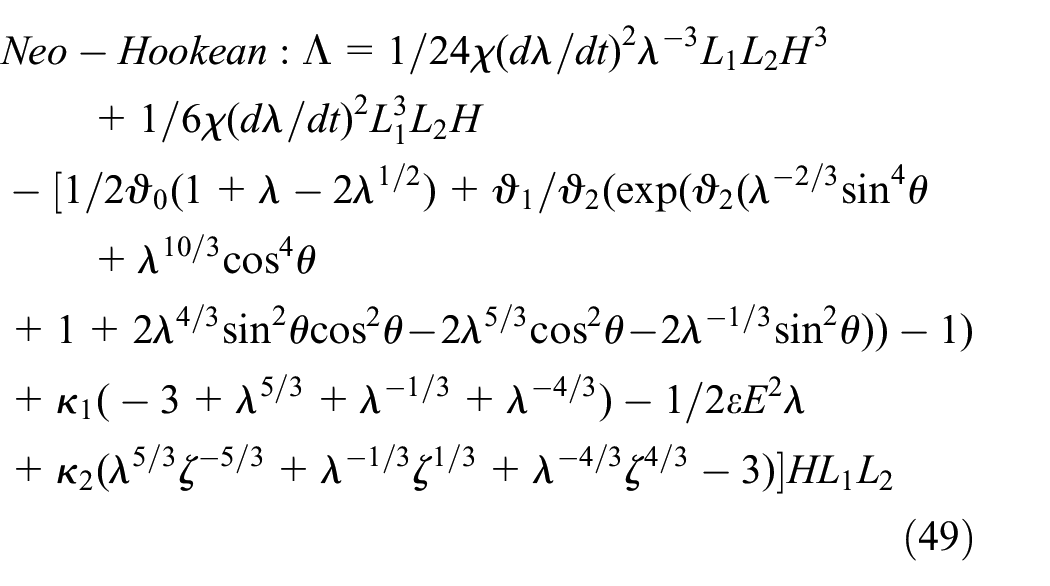
The proposed model is also considered for modeling the isotropic part as follow

in which,
The various forms of volumetric functions can be presented as following (Tuan and Marvalova, 2007)

where
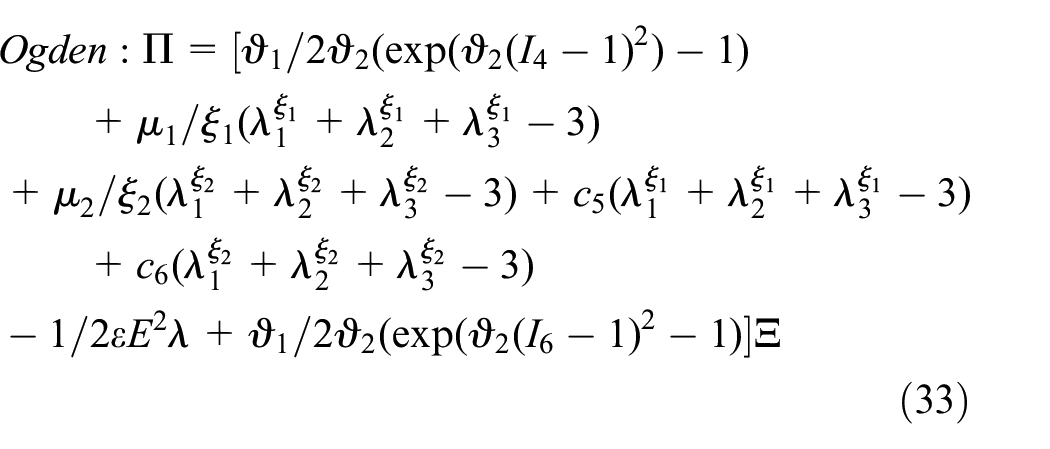
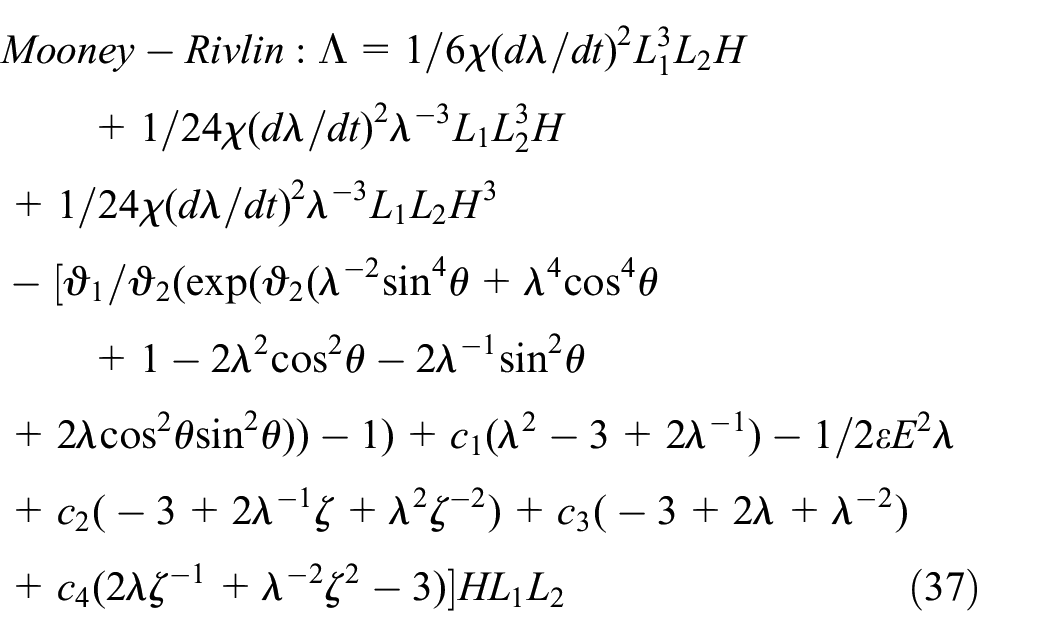
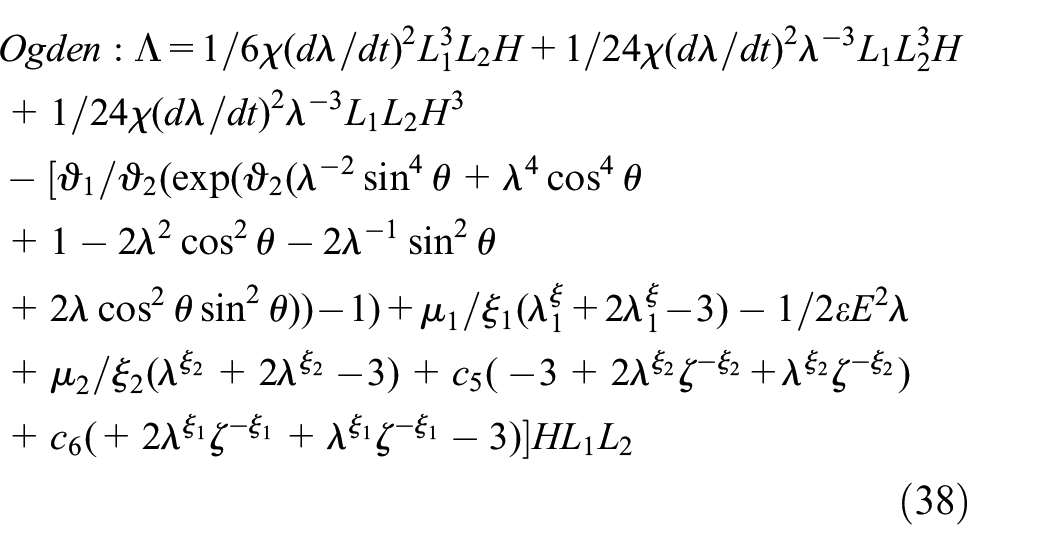
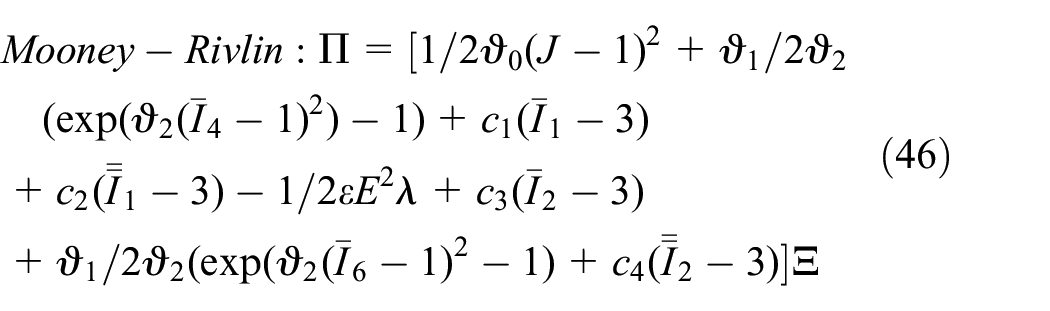
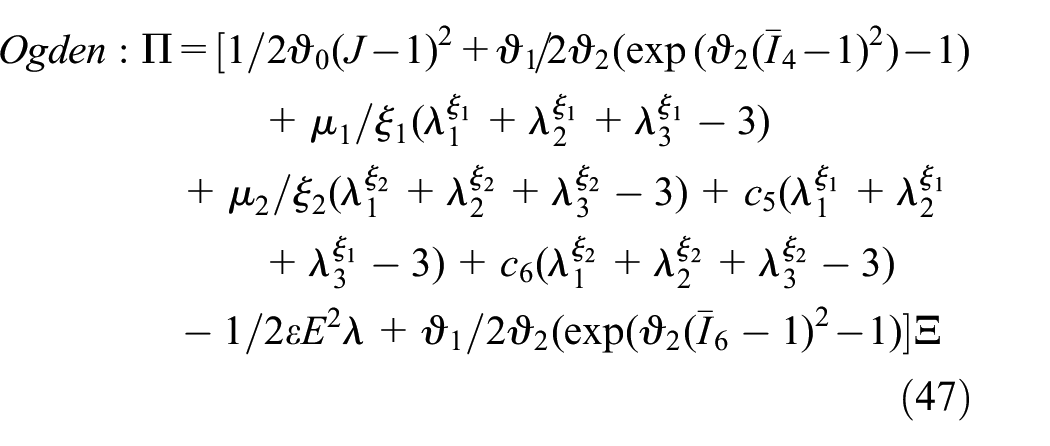
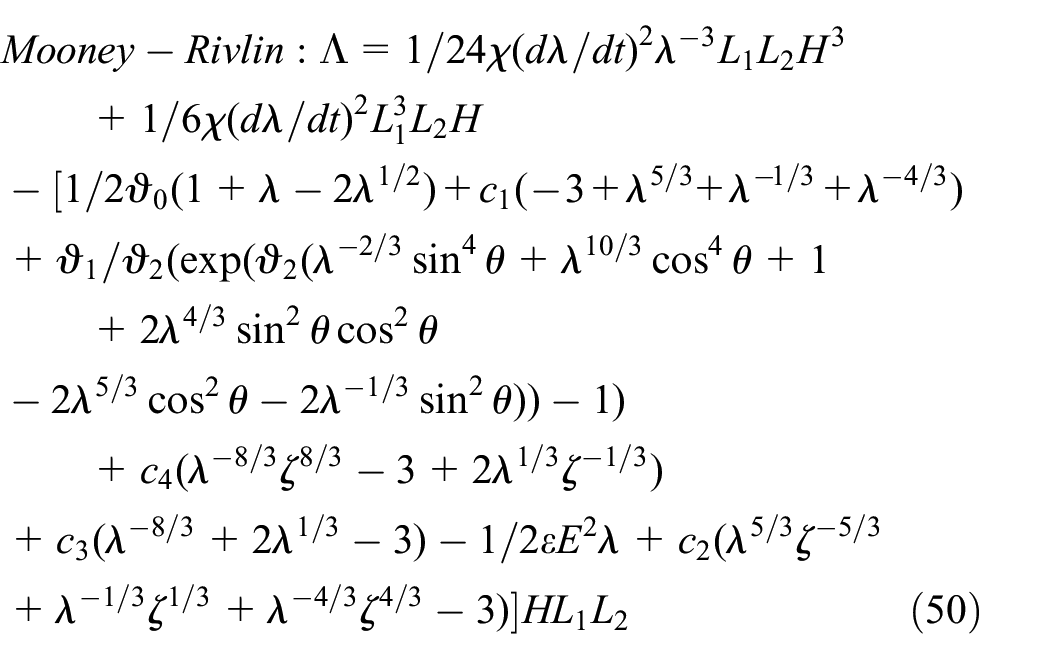
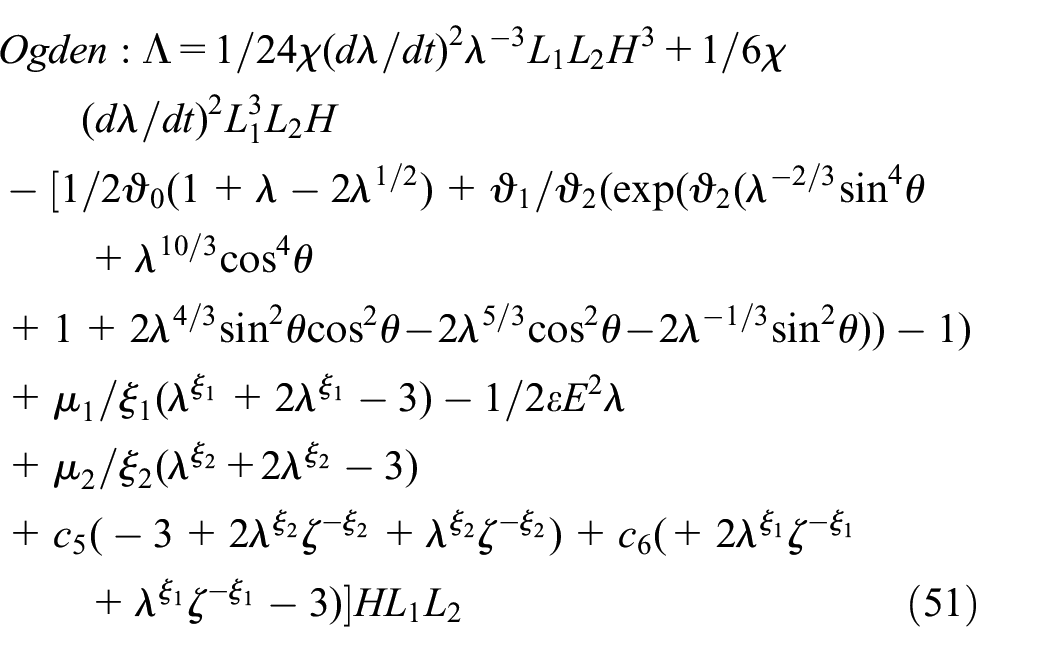
The common hyperelastic models can be written as following (Kim et al., 2012)



where


The anisotropic deviatoric part is developed as polynomial (Nam, 2004) and exponential functions as follow
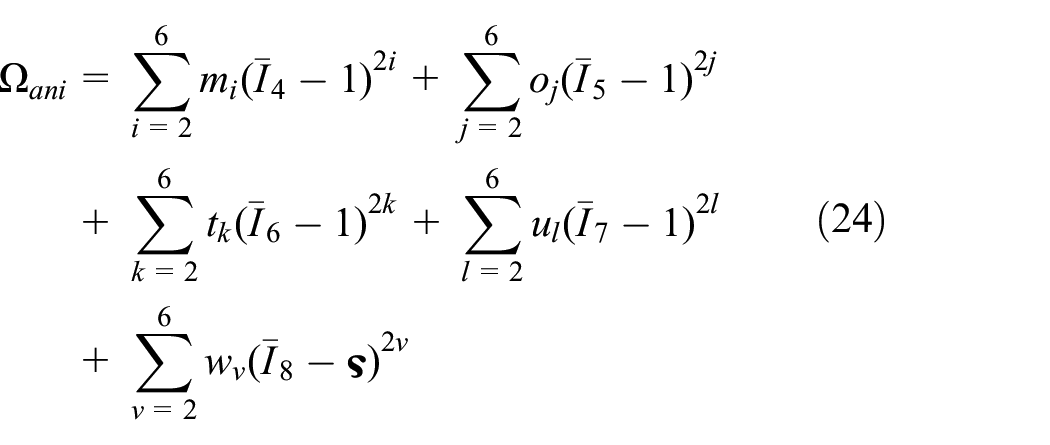
where
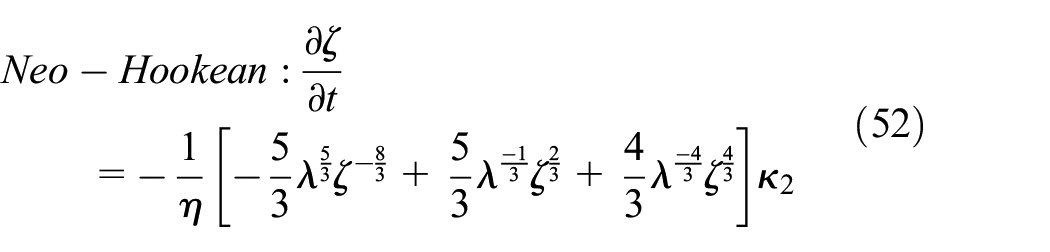
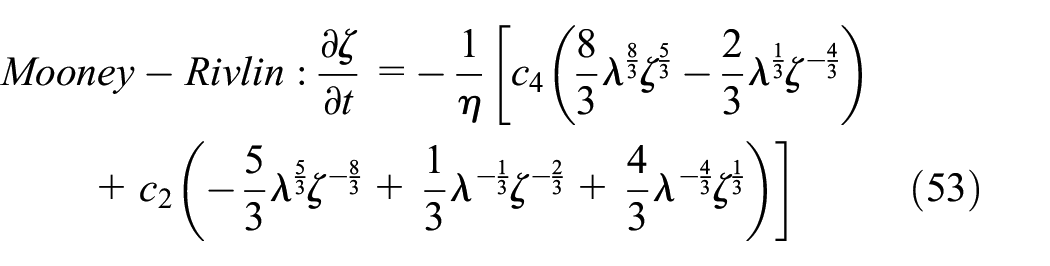
One of the important parameters that can extremely affect the electromechanical behaviors of ADEs and even limit their applications is viscoelasticity. To describe the viscoelastic behavior, the DE membrane is approximately simulated by various models such as the damping model (Zhao et al., 2011), rheological model (Park, 2018), Kelvin–Voigt model (Lei et al., 2013), Maxwell model (Wenchang et al., 2003), and a combination of both models called Kelvin-Voigt-Maxwell model (Zhang et al., 2017). Because of the simplicity and reliability of the rheological model, this model is selected in this study. Based on the rheological model of springs and dashpot in Figure 3, both springs have different shear modulus (the top spring with
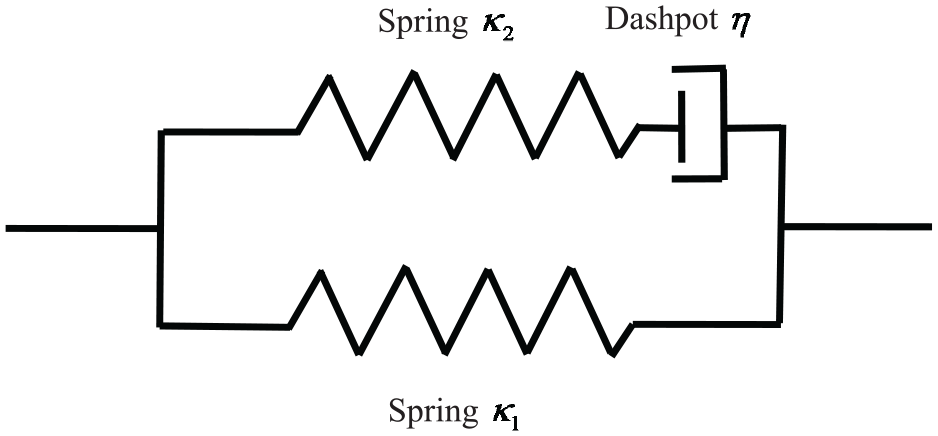
Schematic representations of a rheological model for a viscoelastic ADE.
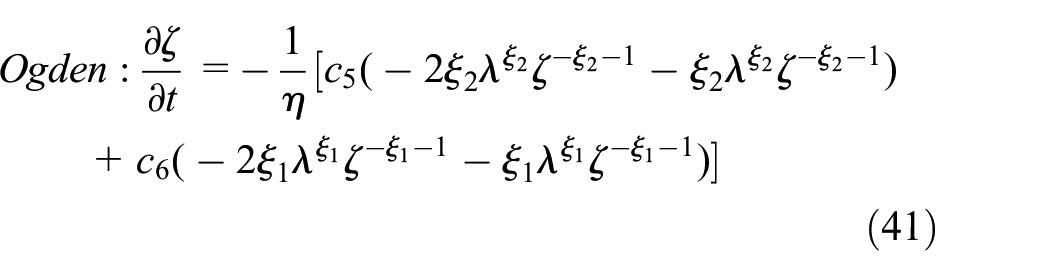
Based on multiplication rule (Sheng et al., 2013) as

It should be stated that the relation between the viscosity of the dashpot
In Figure 4 a DE reinforced with fiber is depicted and its dimensions in the un-deformed and uncharged state (original size) are
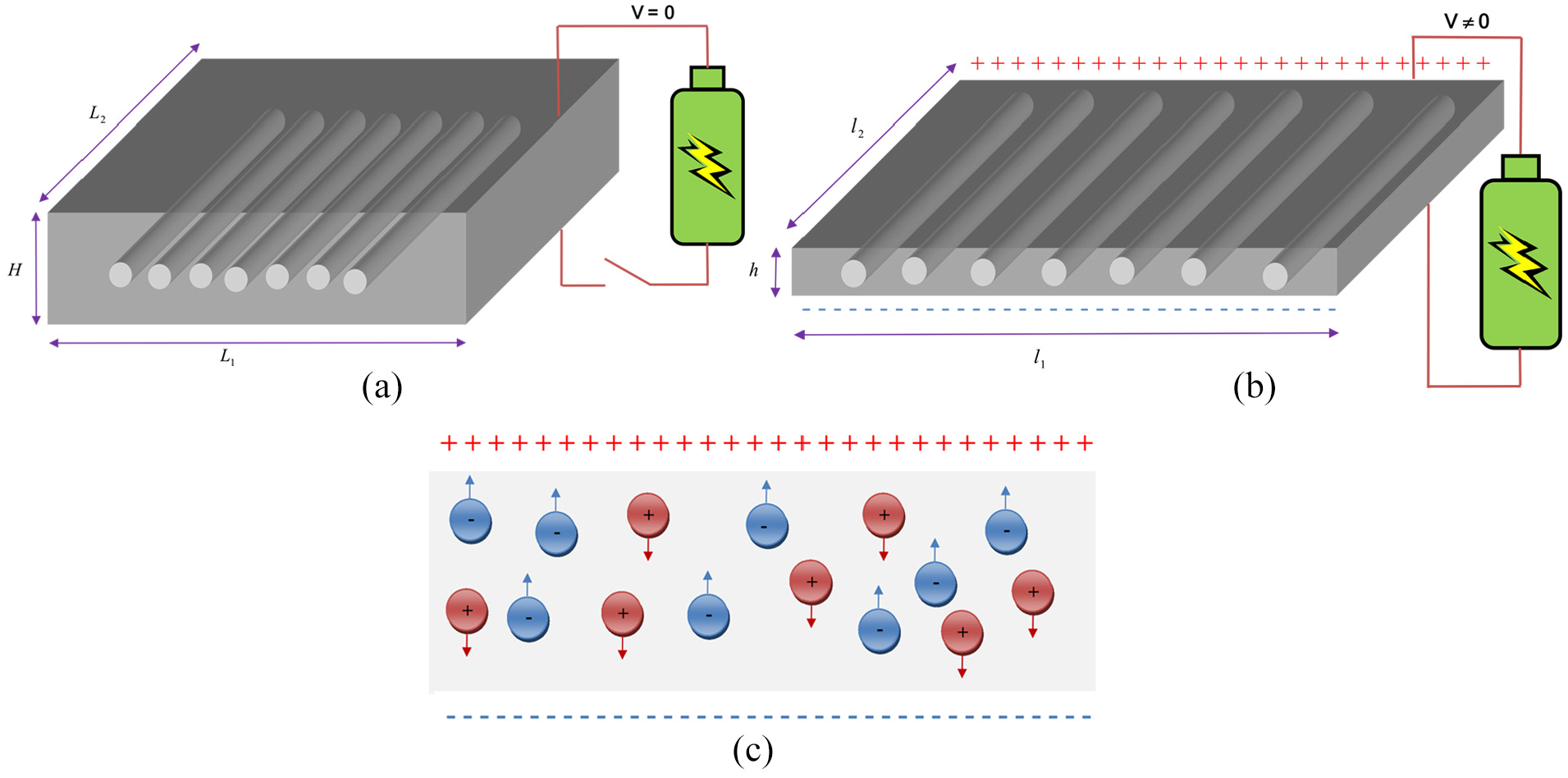
An ADE (a) before applied voltage, (b) after applied voltage, and (c) with the positive and the negative charge on top and below of the surface of the membrane.
2.1. Uniaxial tension
Given that the authors’ approach is to use a semi-analytical method, based on the following assumptions, the scalar equations have appeared.
Based on the homogeneous deformation in each dimension, the stretch ratio can be defined as follows
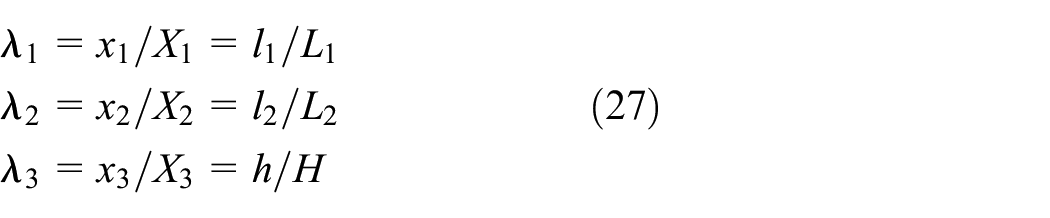
Applying the incompressibility constraint for an ADE, the time-dependent stretch and the motion of the body change to the following form
Using the above equation, the matrix forms of the deformation gradient and the right Cauchy–Green deformation tensor are calculated as follow

The kinetic energy of the DE can also be obtained as follow
where
The potential energy of a viscoelastic ADE subjected to electrical force for different models is represented as follow
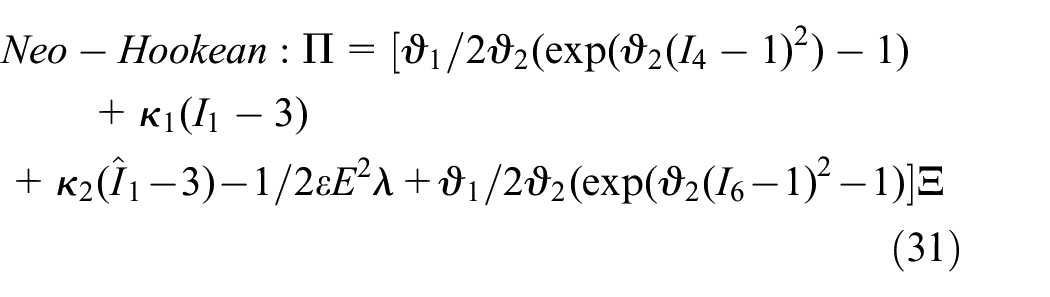
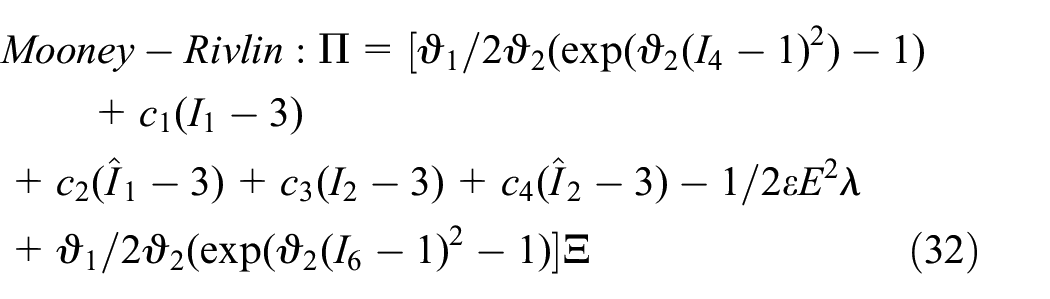
where
The fiber-reinforced material with arbitrary direction for the following analysis is shown in Figure 5.
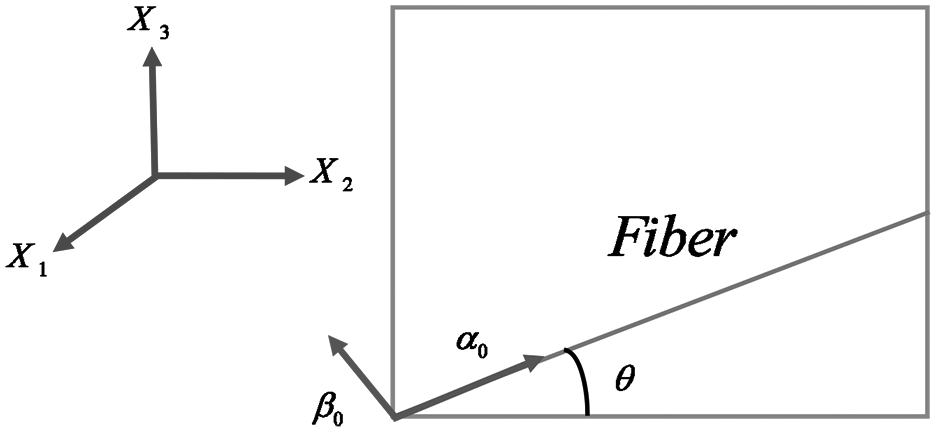
The orientation of fiber in an ADE.
To get the nonlinear governing equation of motion for the time-dependent stretch

Employing the kinetic energy and potential energy of ADE, the following equations are derived as follows
where
And the other couple equation based on


2.2. Pure shear
The motion of the body for a pure shear state can be proposed as follow

where

Like the previous section, the kinetic energy of the DE can be developed as follow

The potential energy of a viscoelastic ADE where
where
Now the simple form of the Lagrange function can be derived as follow
Again, to get the time-dependent stretch, another couple equation is needed as follow

3. Results and discussions
Here, the comparison of results has been made to confirm the accuracy of the mentioned method in this paper with Xu et al. (2012) (Figure 6).
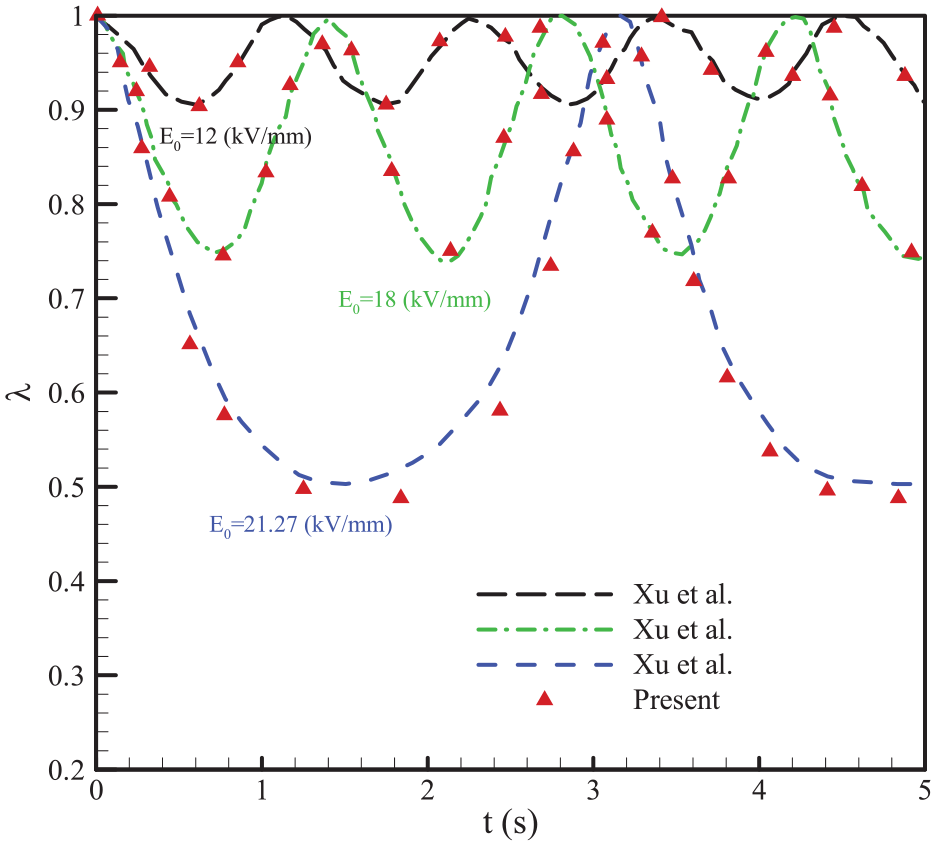
Performance verification of isotropic DE for a different electric field with the present study.
The obtained results are also compared with those experimentally reported by Son (2011) and Schröder et al. (2005). Son introduced the initial dimensions for the simulation as
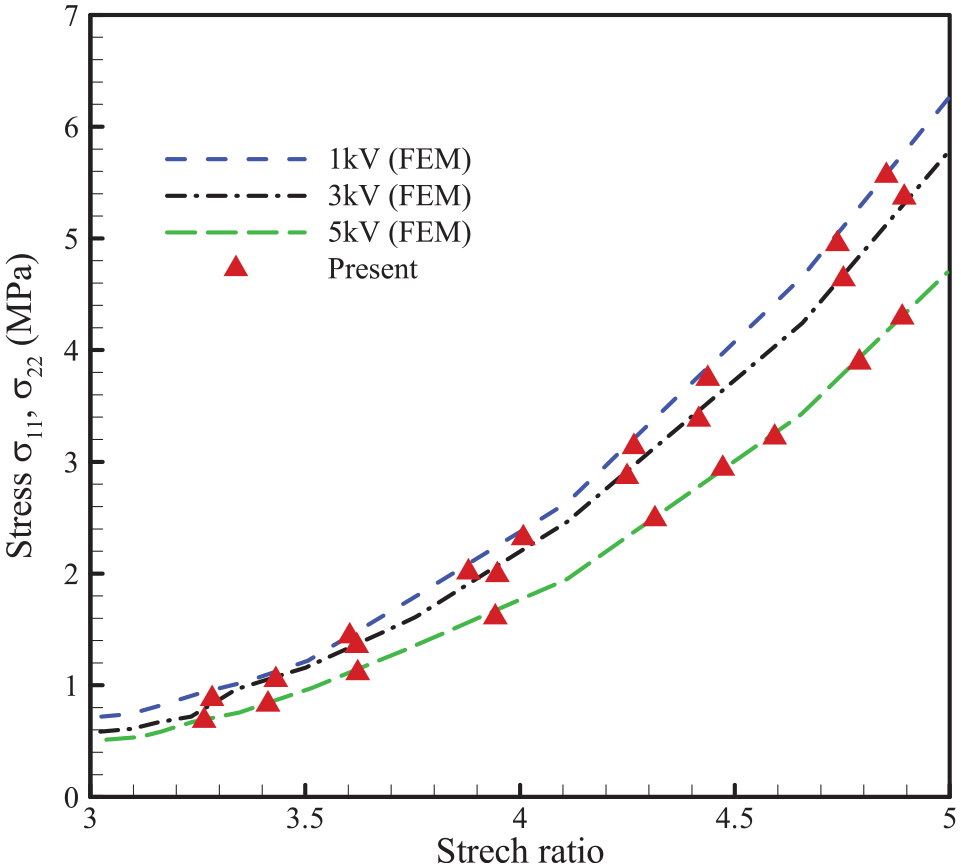
The electromechanical response of the pre-stretched isotropic DE based on the applied voltage.
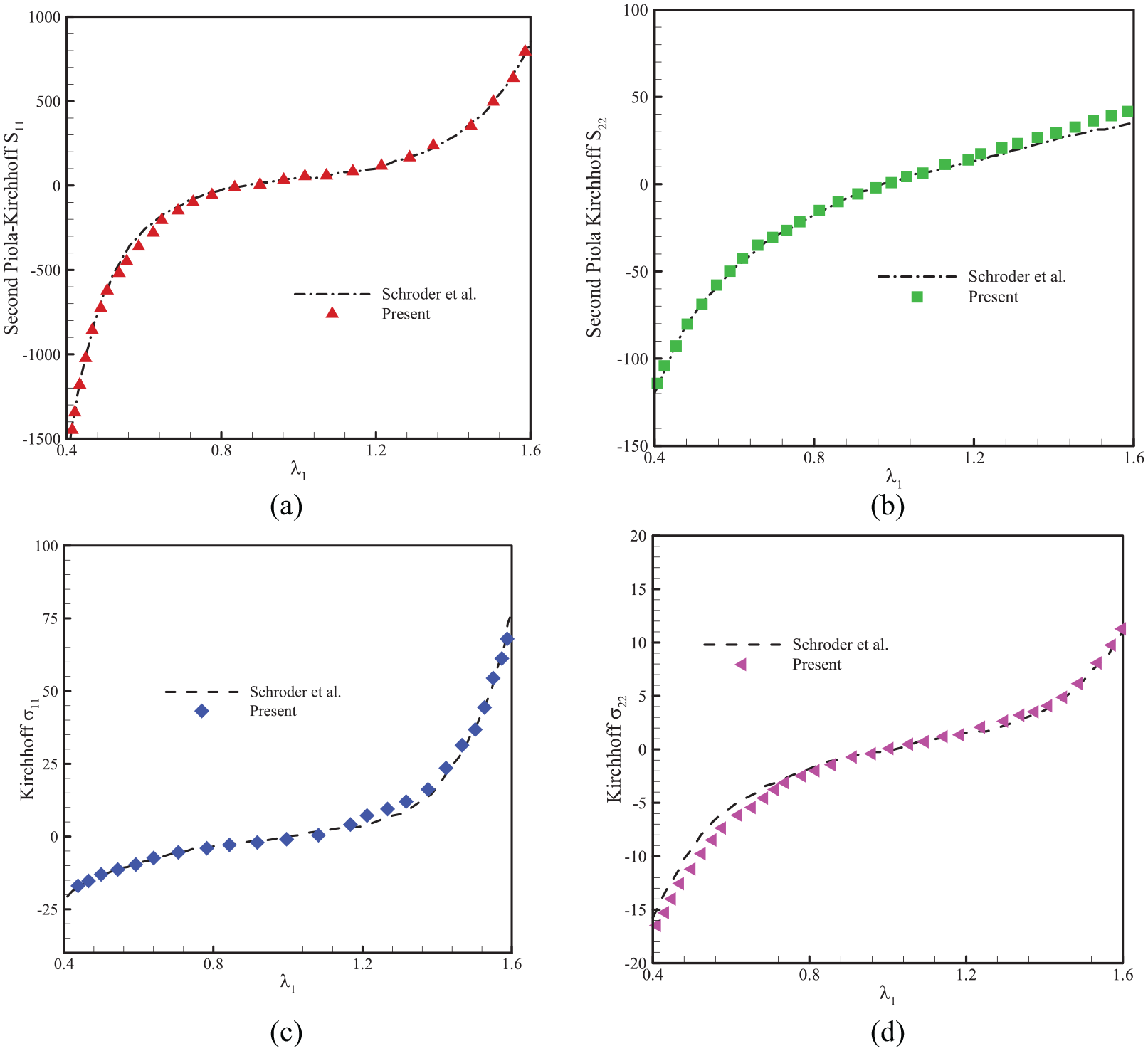
Comparison of the reference model and the presented model showing the Kirchhoff
The ADE properties and initial conditions used in this study are listed as follows

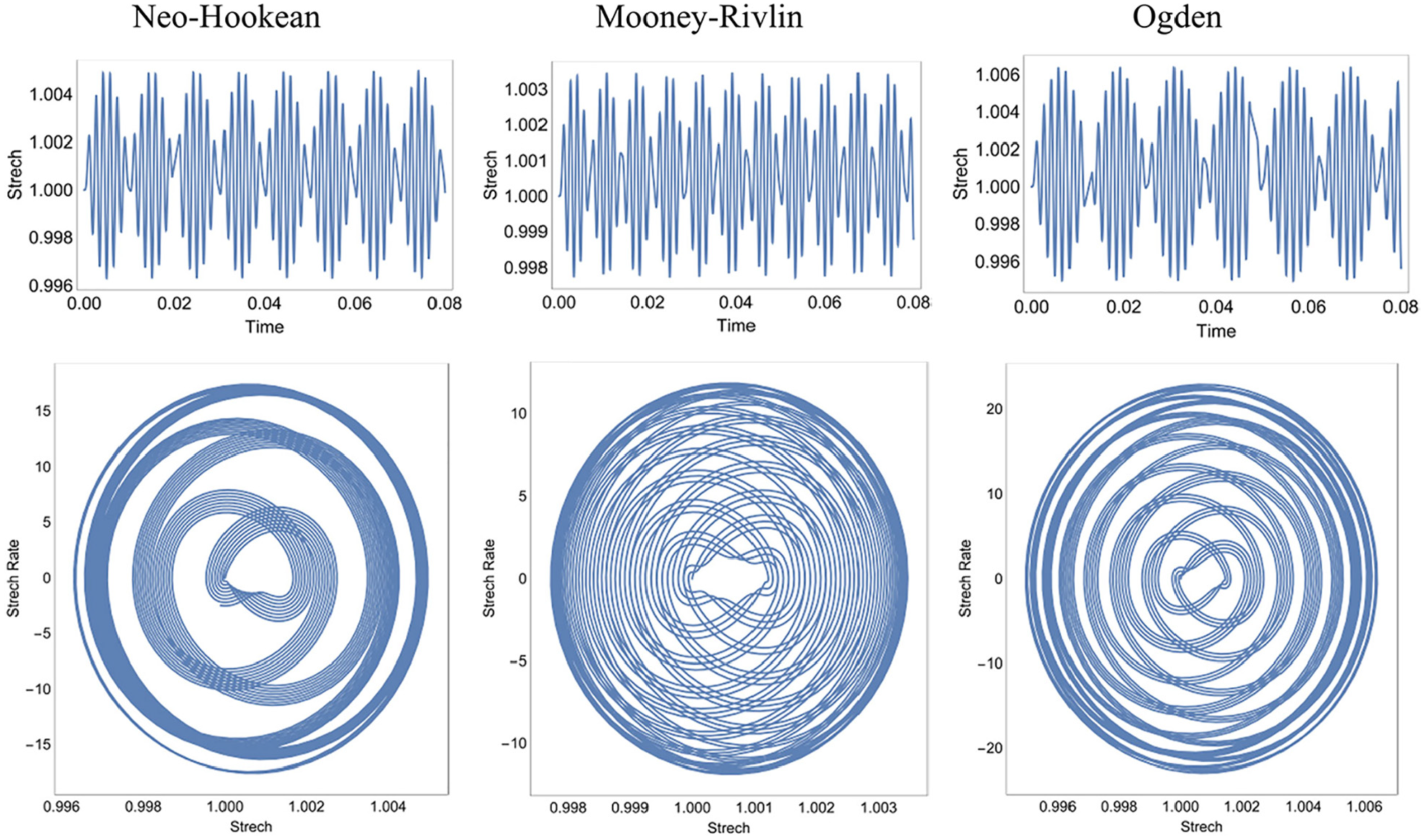
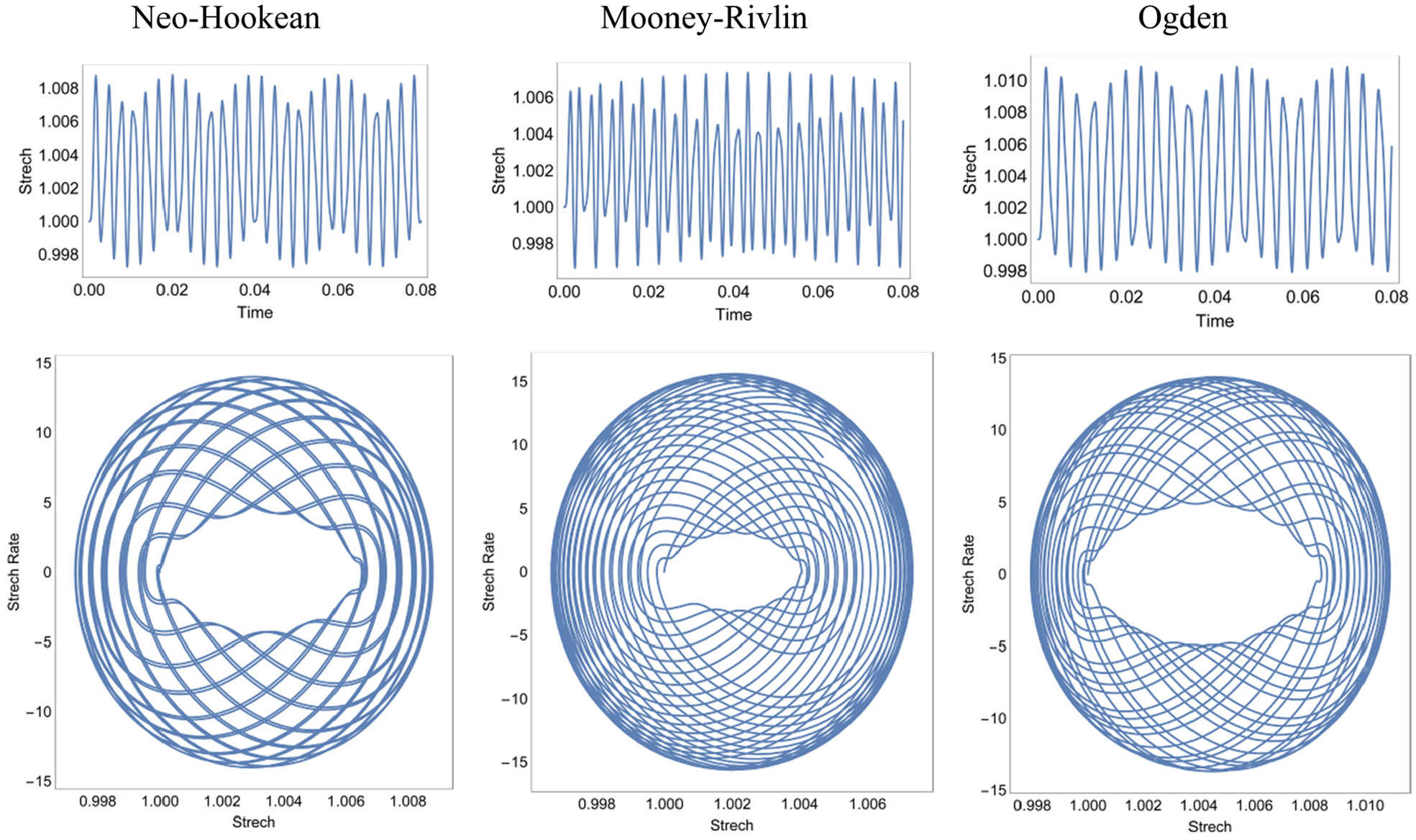
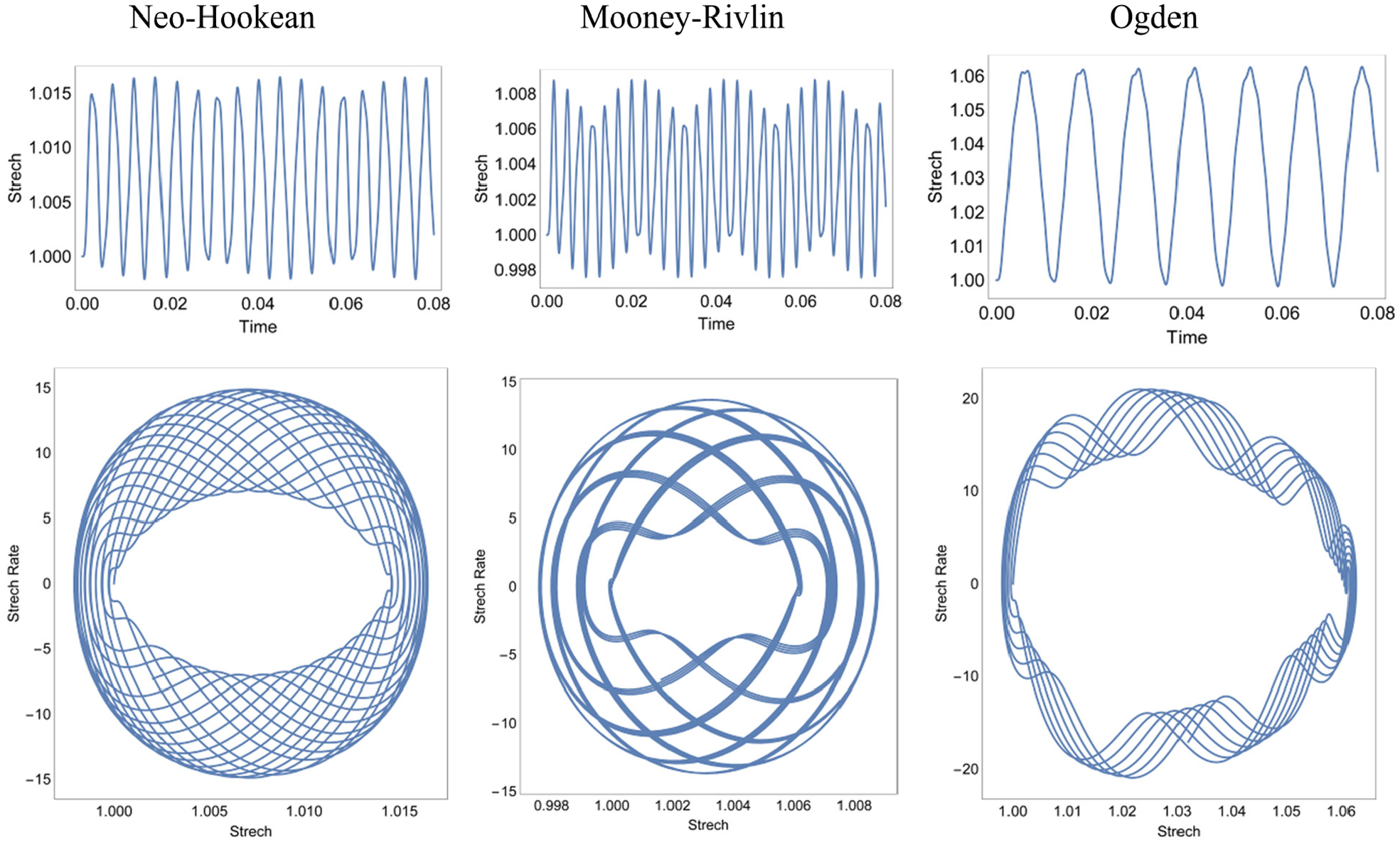
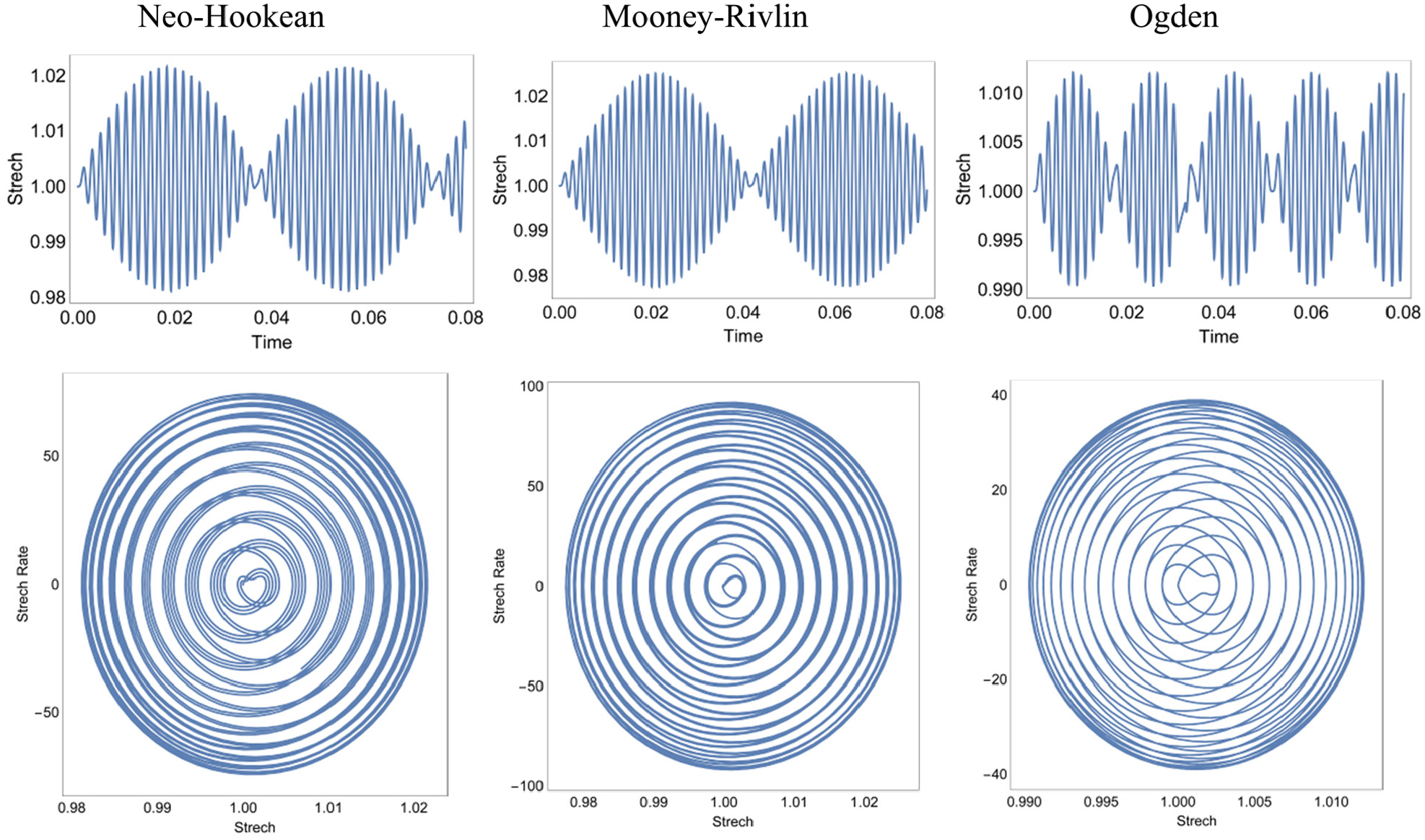
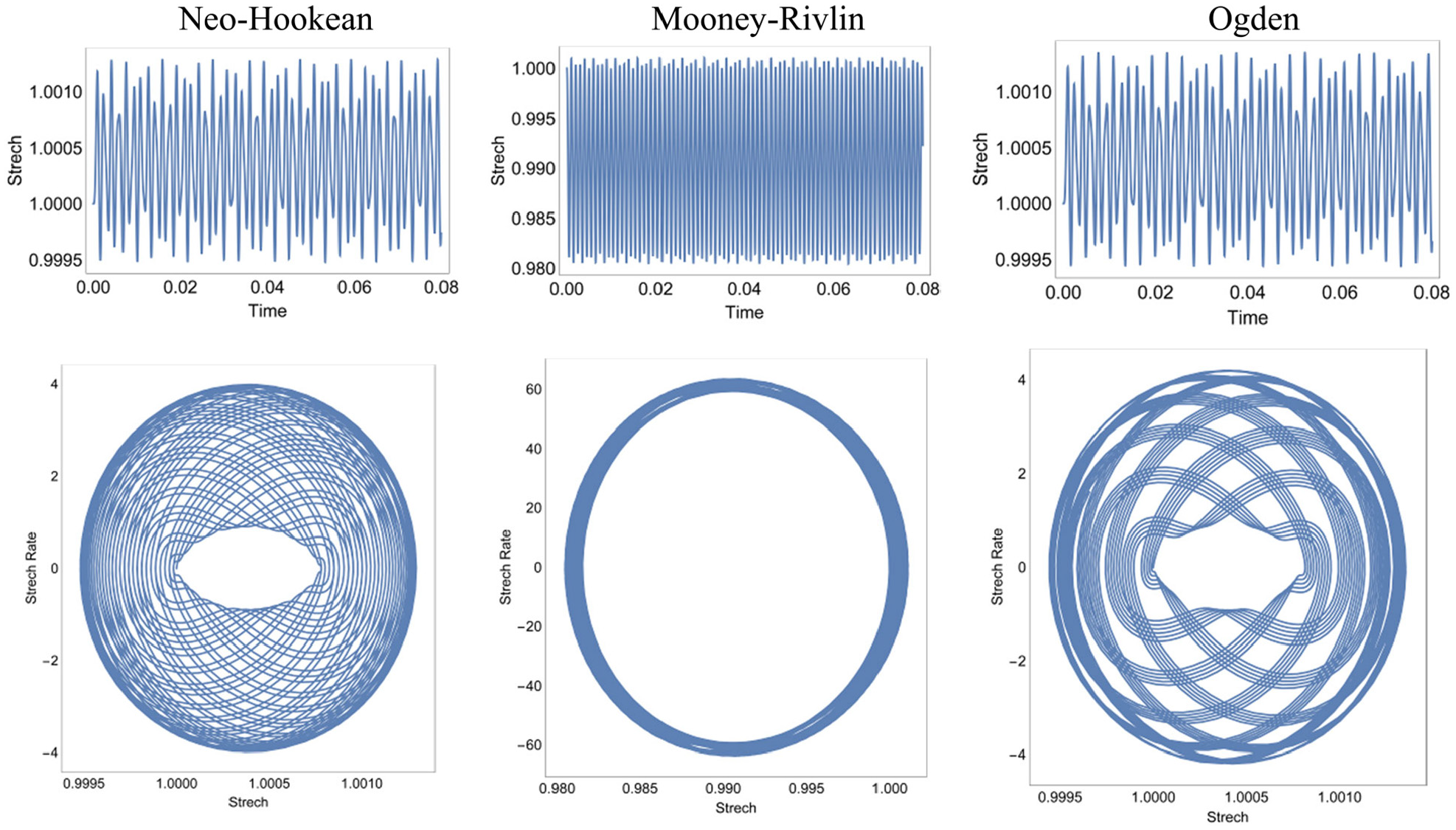
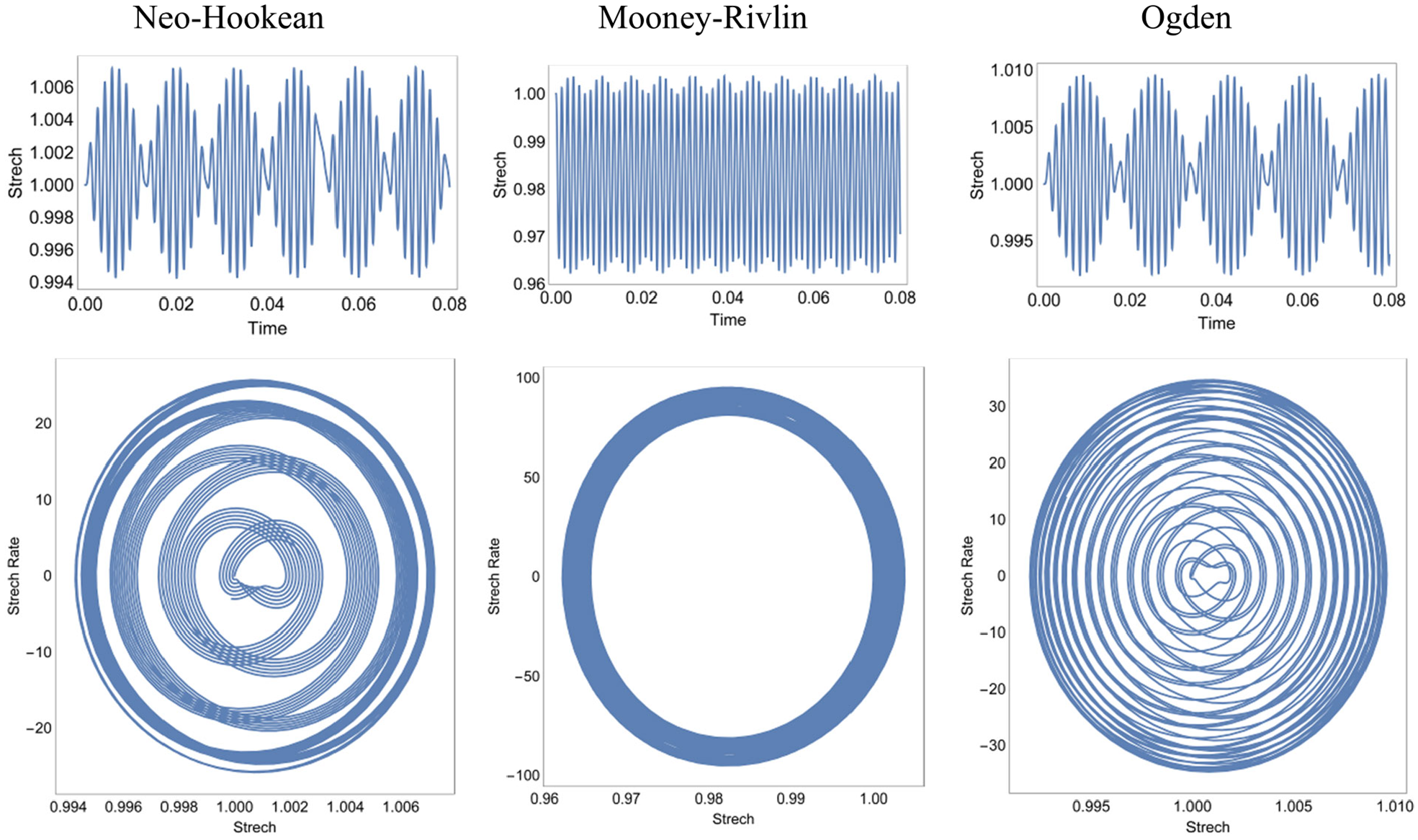
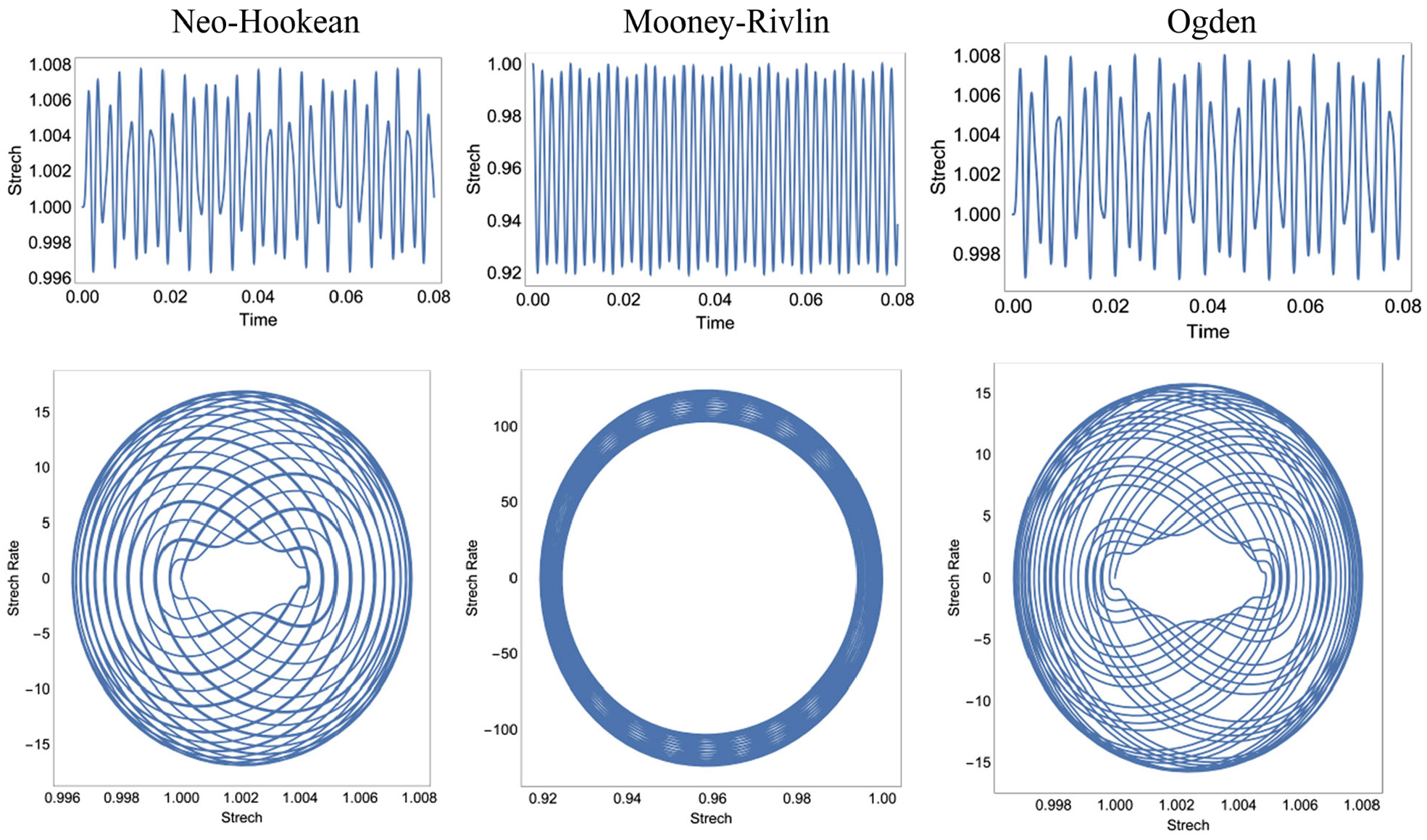
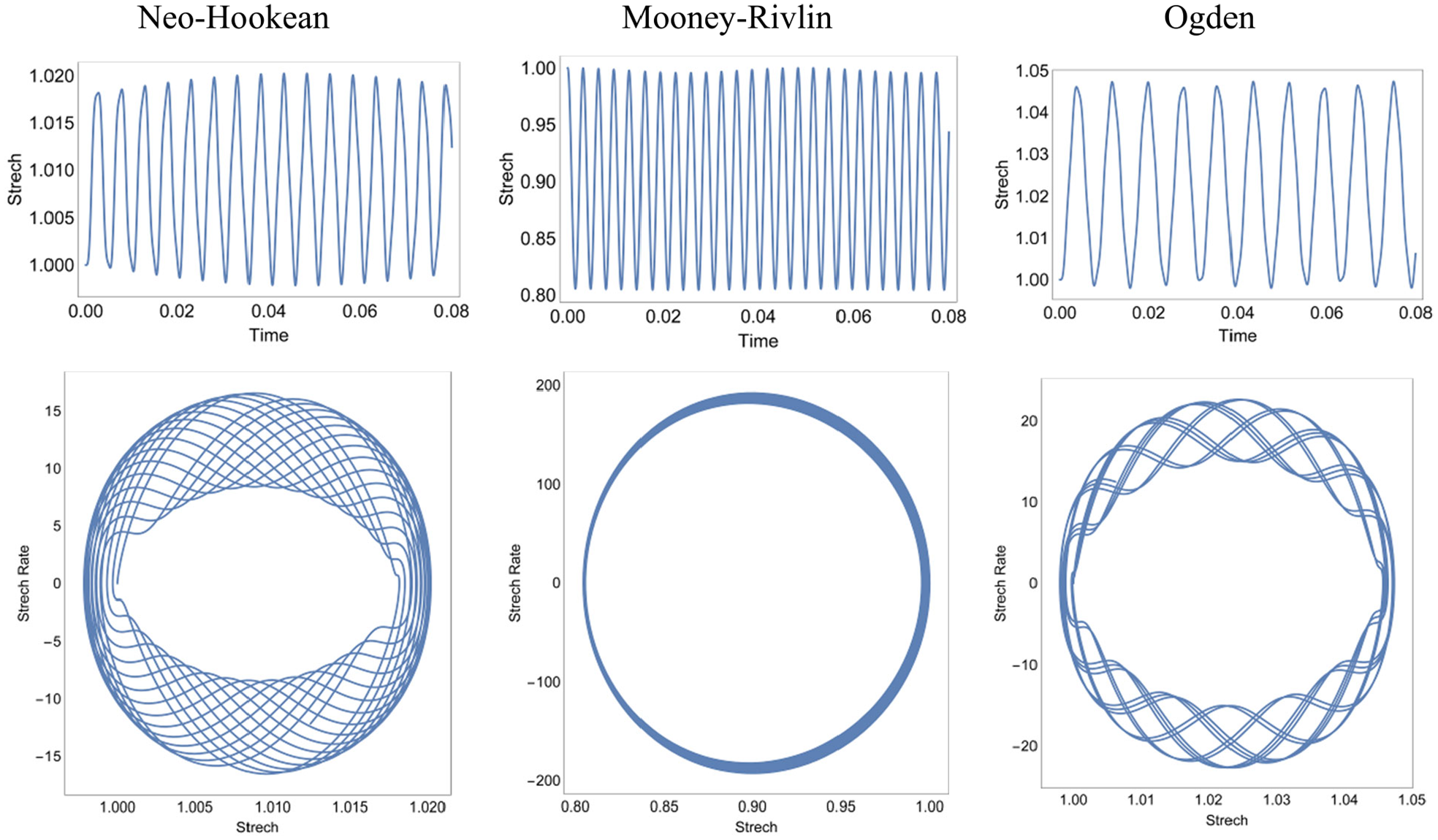
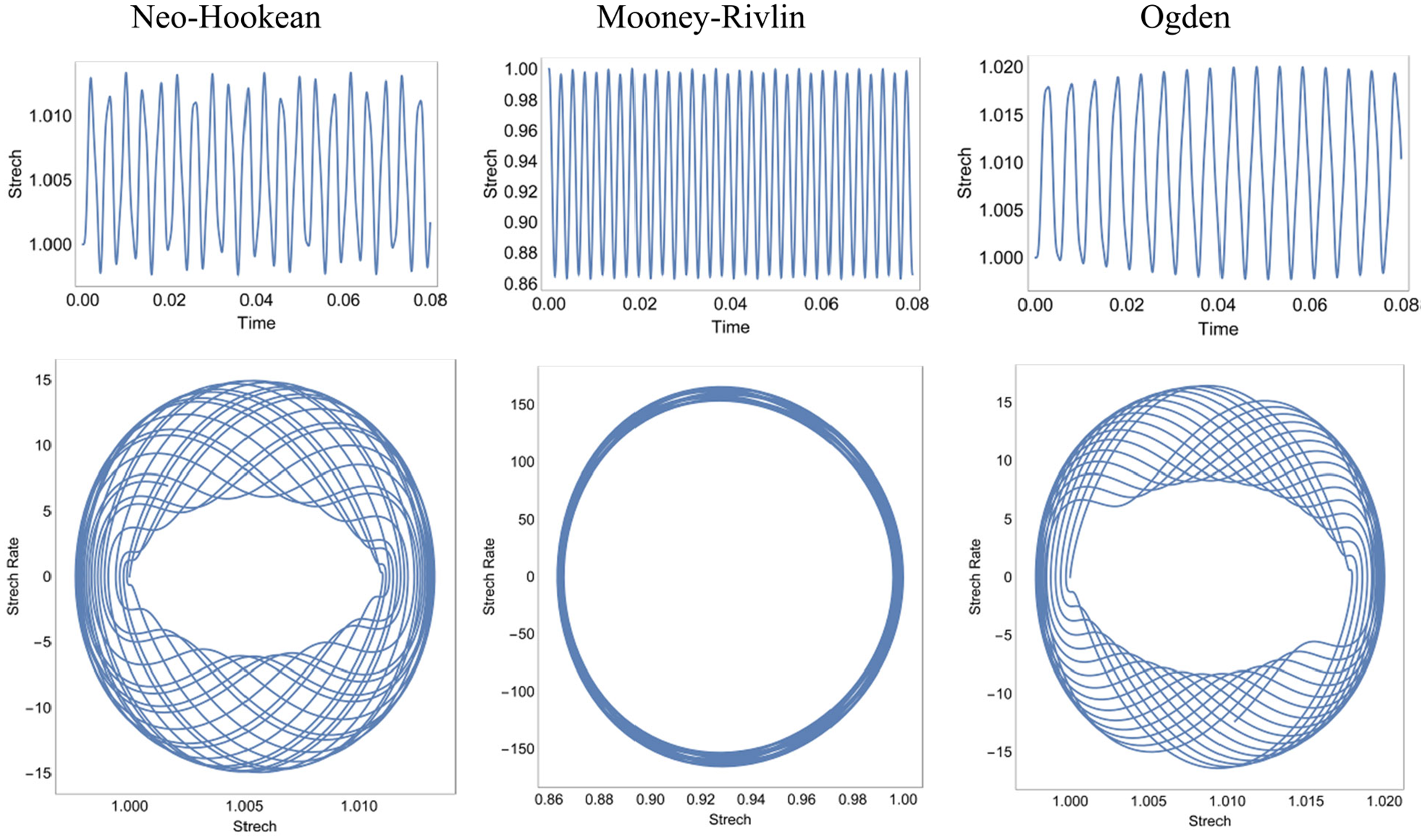
Figures 9 to 18 sketch the relation between the time-dependent behavior of the amplitude and the phase diagram for three hyperelastic models with
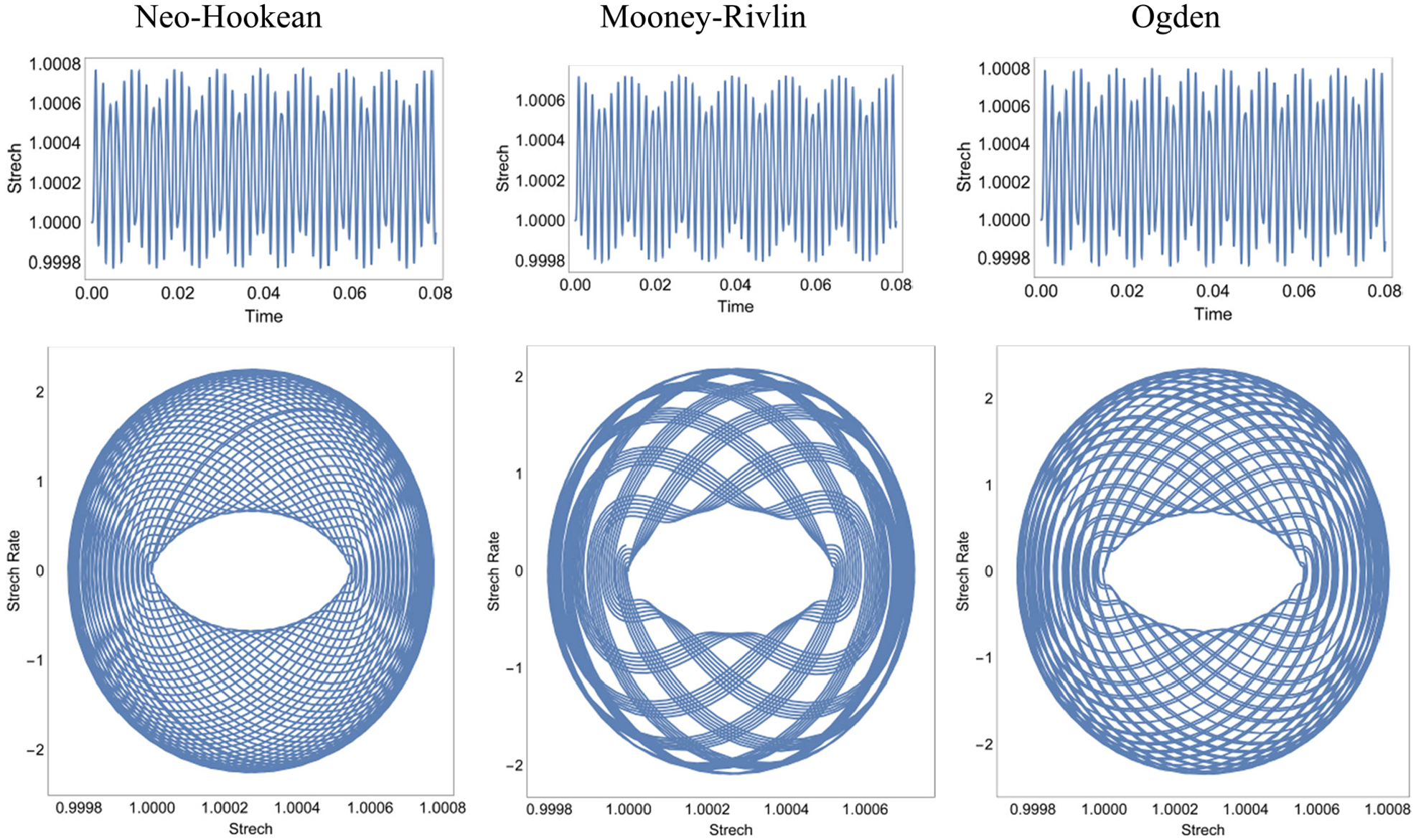
Comparing the phase diagrams and oscillations of various models for uniaxial tension and
Comparing the phase diagrams and oscillations of various models for uniaxial tension and
Comparing the phase diagrams and oscillations of various models for uniaxial tension and
Comparing the phase diagrams and oscillations of various models for uniaxial tension and
Comparing the phase diagrams and oscillations of various models for uniaxial tension and
Comparing the phase diagrams and oscillations of various models for pure shear and
Comparing the phase diagrams and oscillations of various models for pure shear and
Comparing the phase diagrams and oscillations of various models for pure shear and
Comparing the phase diagrams and oscillations of various models for pure shear and
Comparing the phase diagrams and oscillations of various models for pure shear and
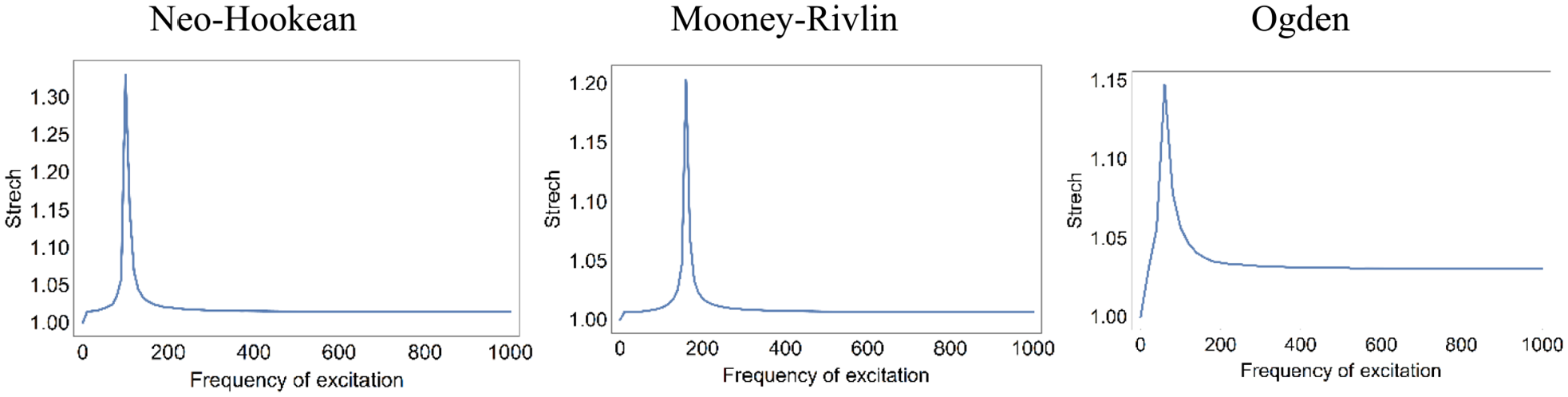
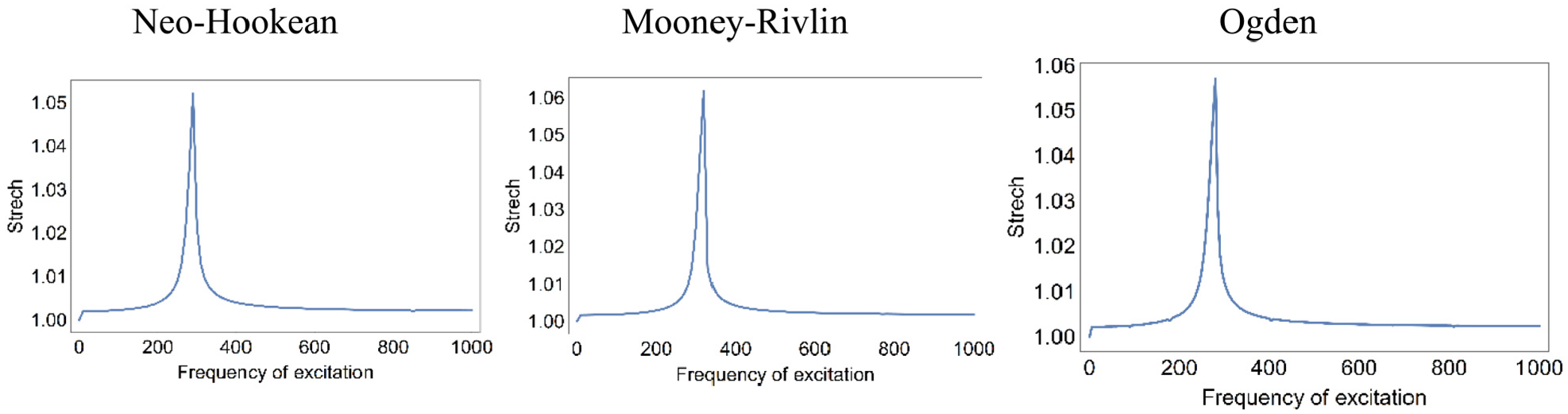
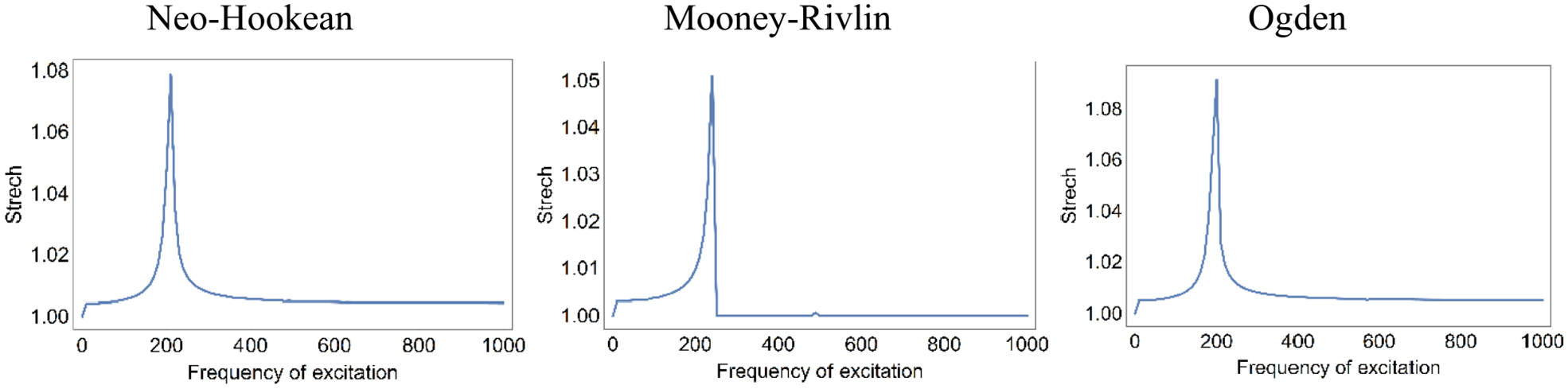
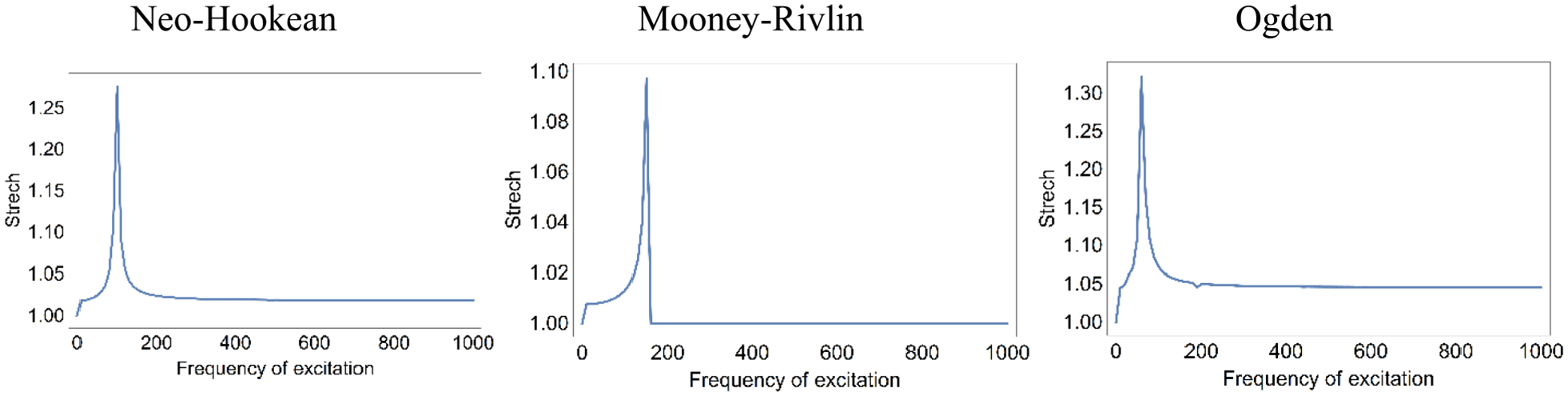
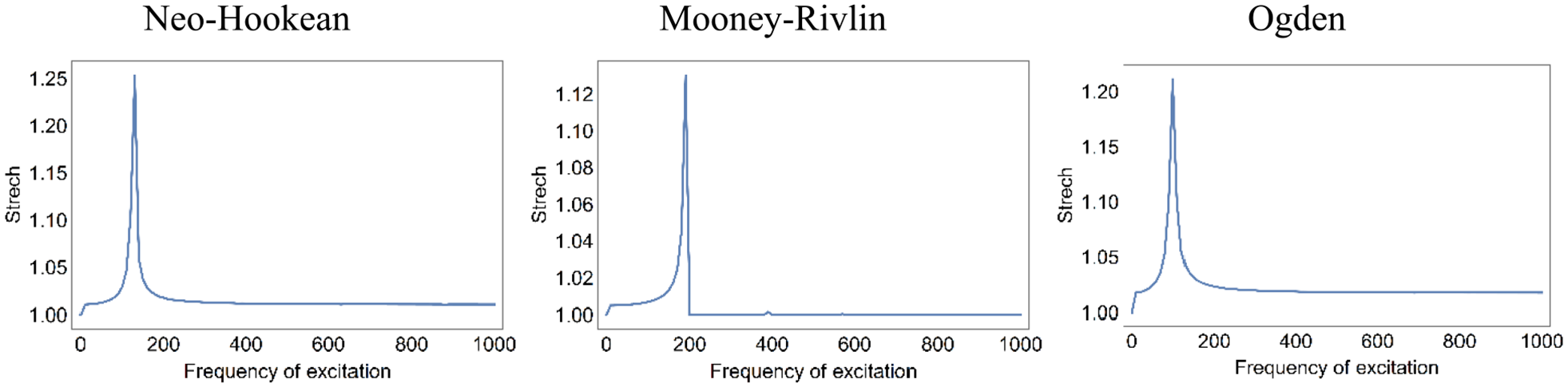
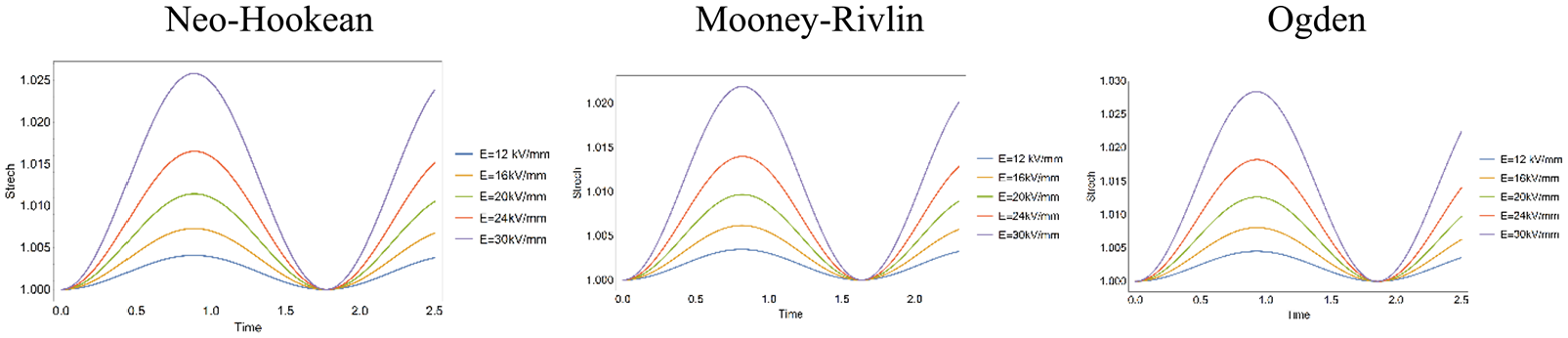
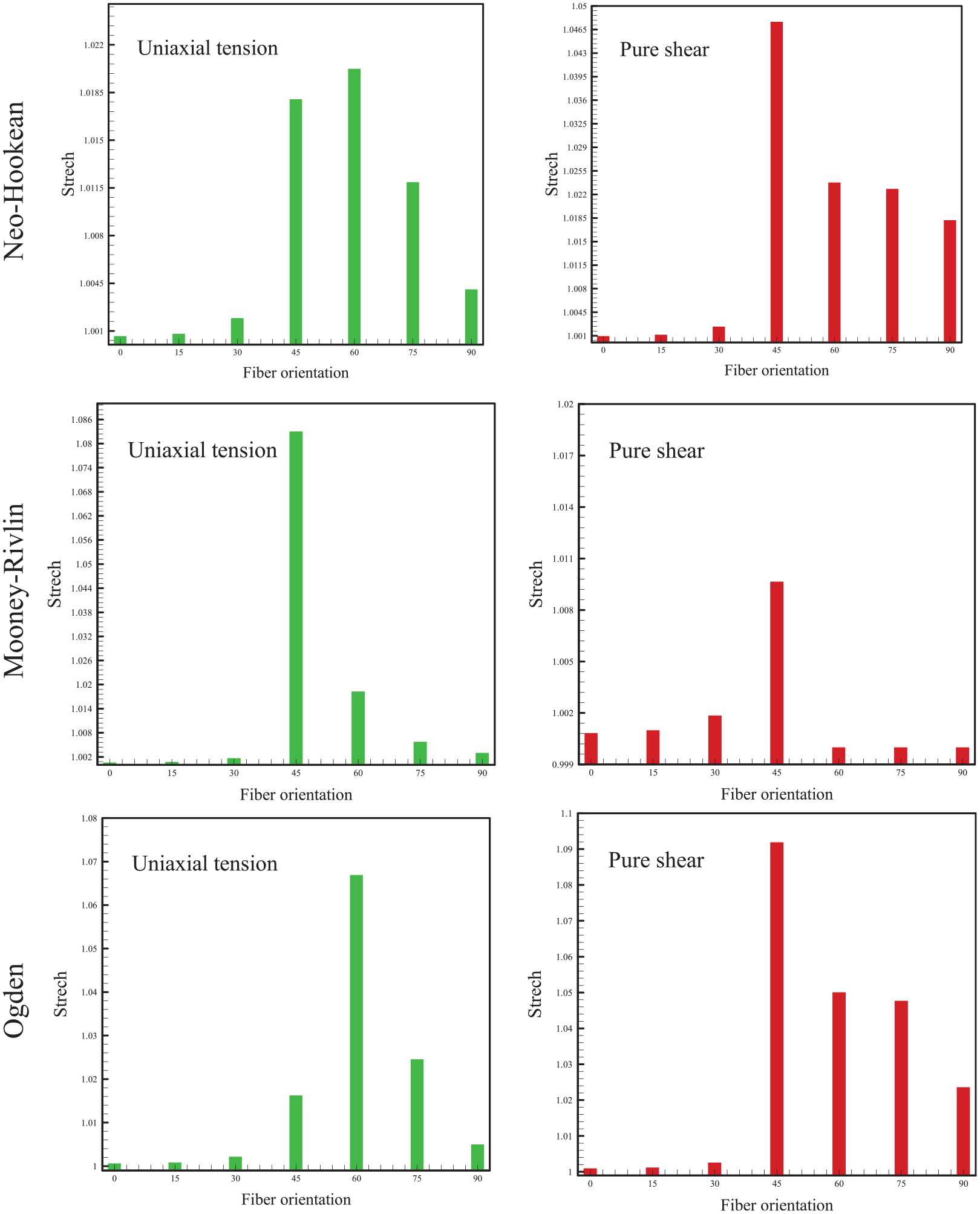
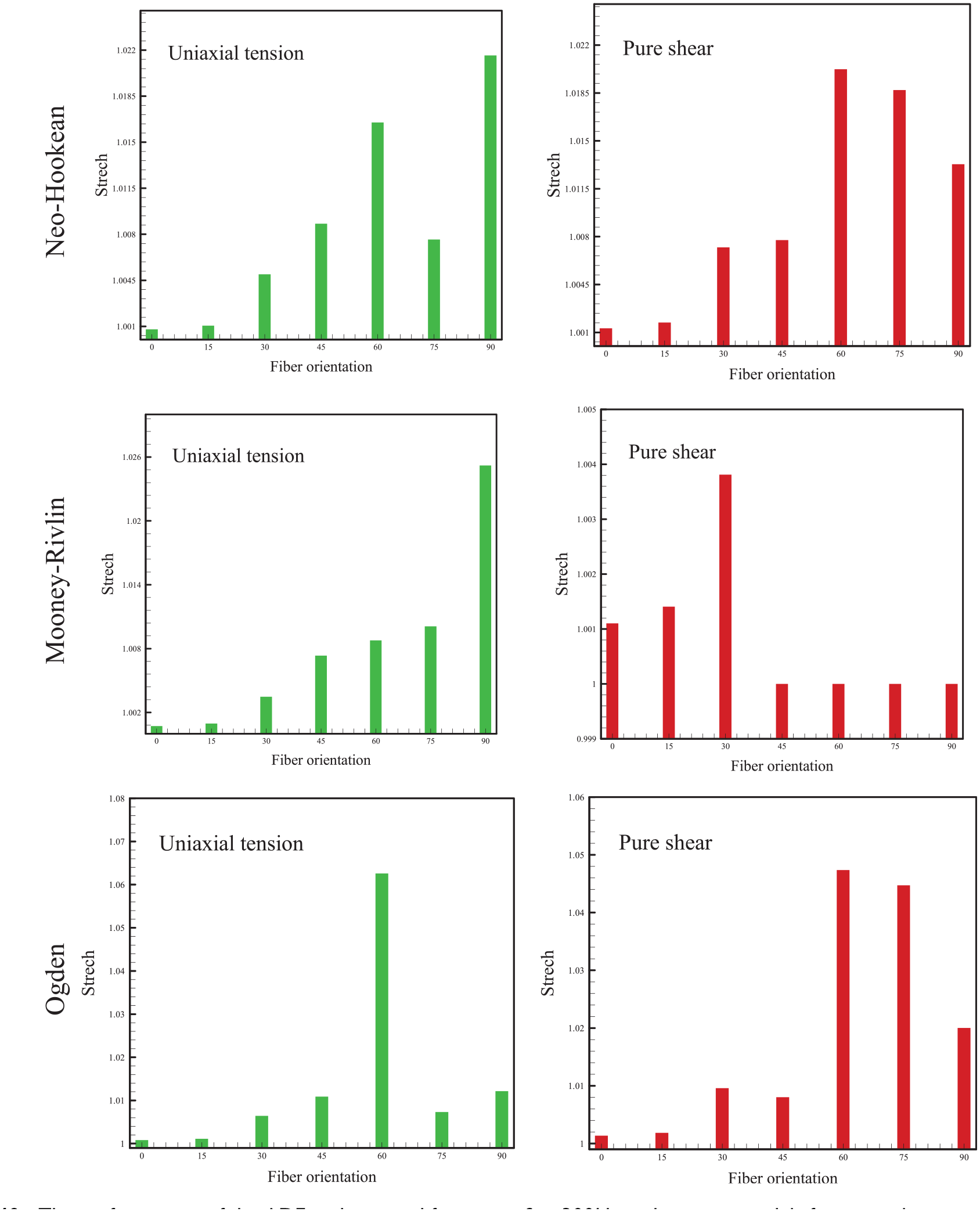
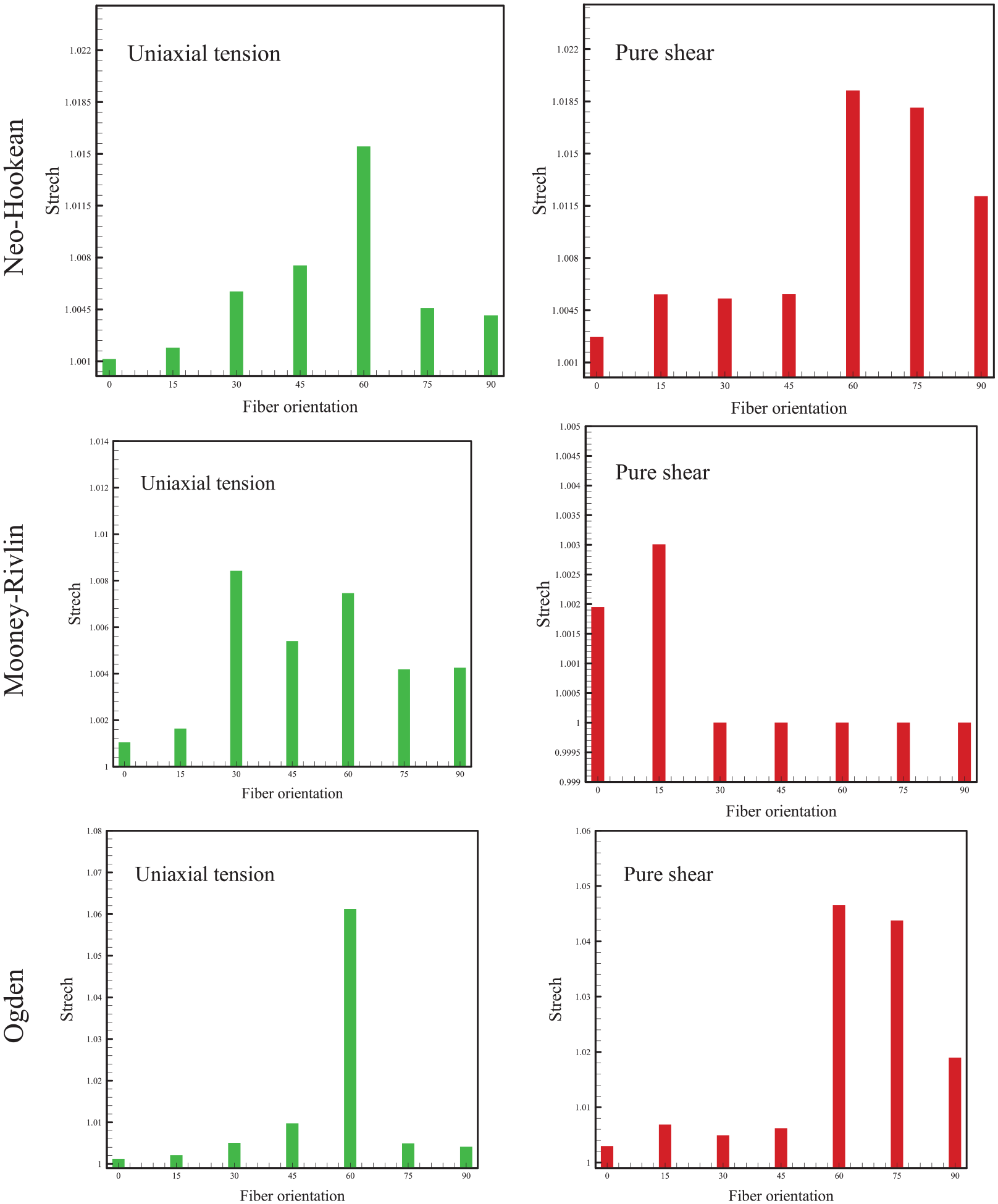
Figures 19 to 28 illustrate the maximum stretch as a function of the frequency of excitation for three hyperelastic models changing with the fiber orientations from
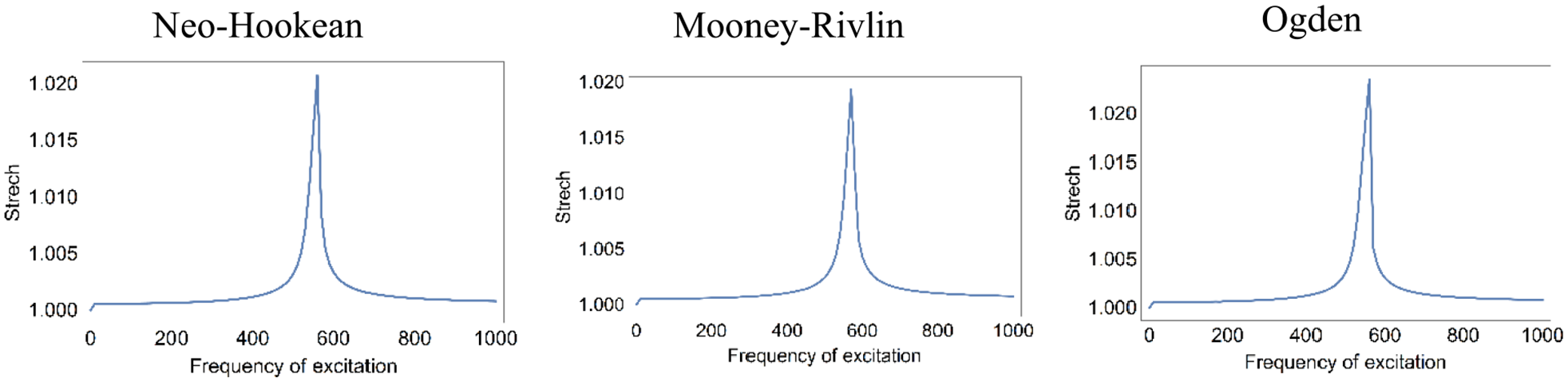
The performances of the ADE under excited frequencies with various models for uniaxial tension and
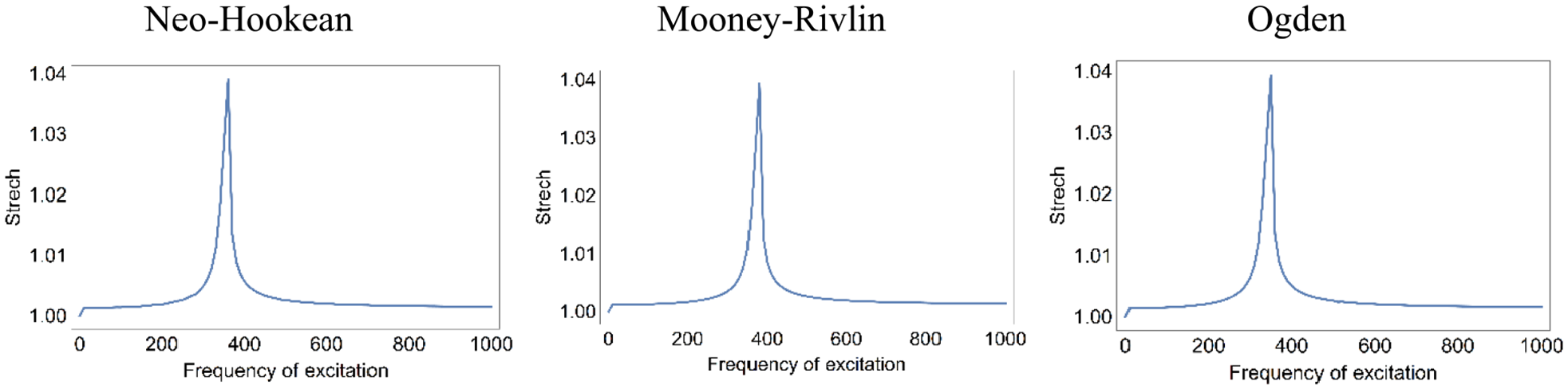
The performances of the ADE under excited frequencies with various models for uniaxial tension and
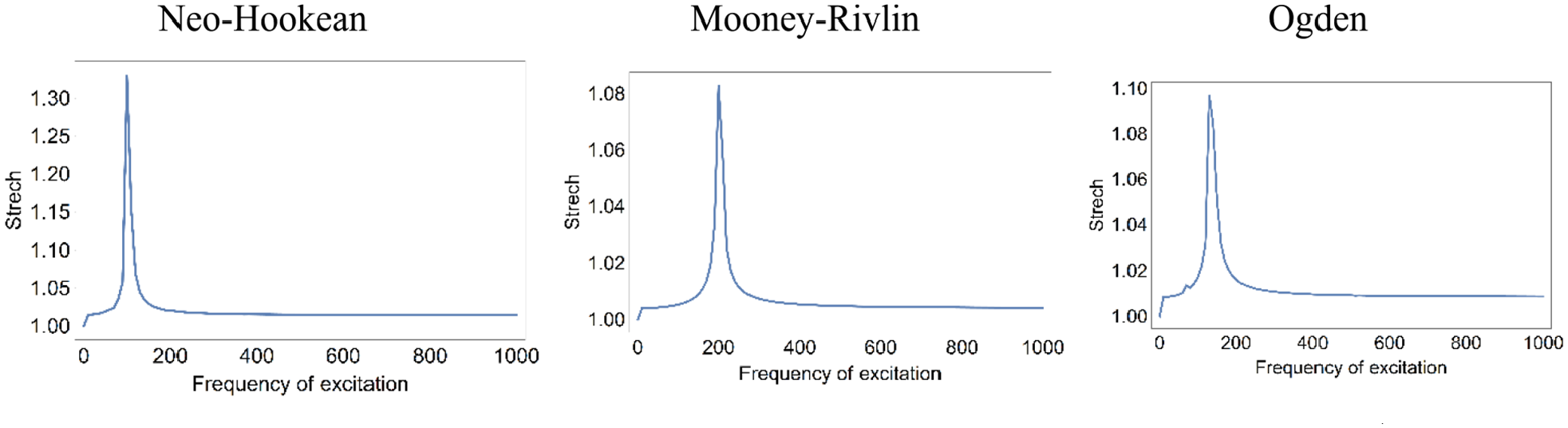
The performances of the ADE under excited frequencies with various models for uniaxial tension and
The performances of the ADE under excited frequencies with various models for uniaxial tension and
The performances of the ADE under excited frequencies with various models for uniaxial tension and
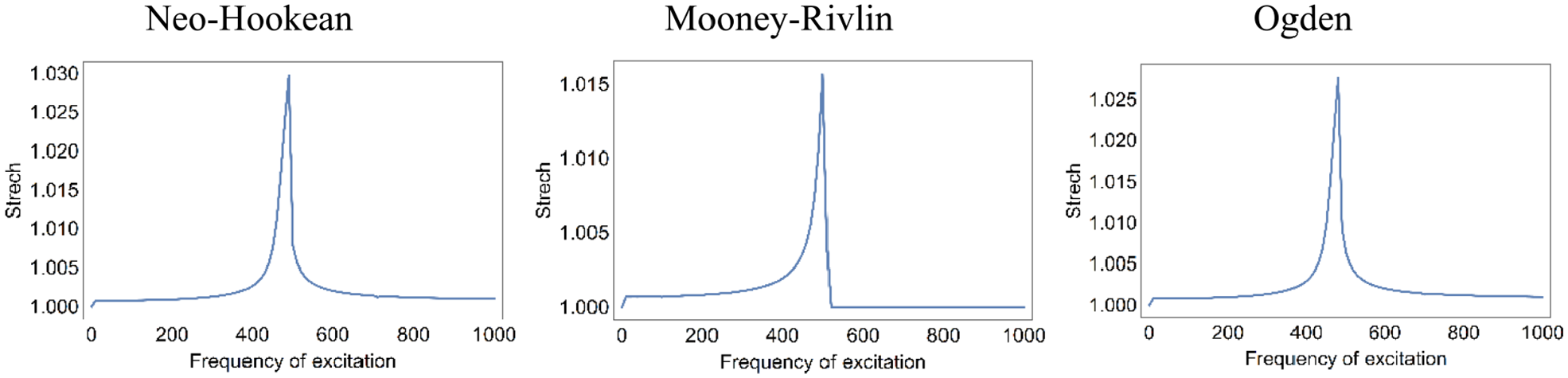
The performances of the ADE under excited frequencies with various models for pure shear and
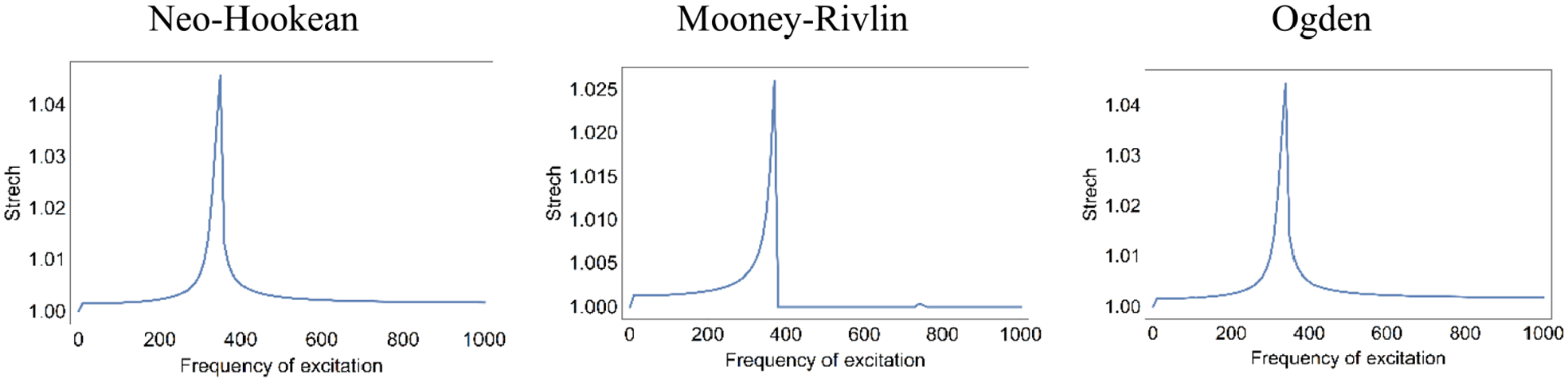
The performances of the ADE under excited frequencies with various models for pure shear and
The performances of the ADE under excited frequencies with various models for pure shear and
The performances of the ADE under excited frequencies with various models for pure shear and
The performances of the ADE under excited frequencies with various models for pure shear and
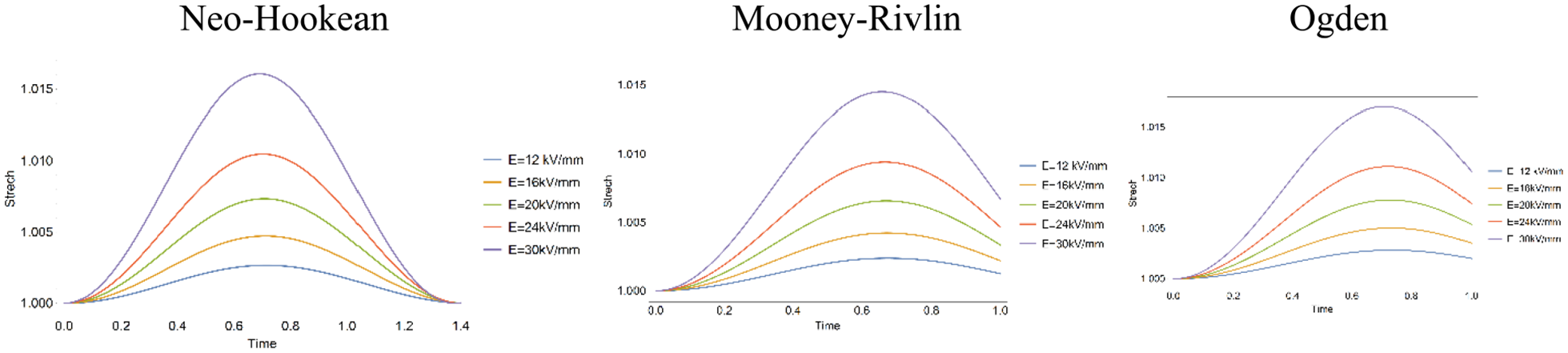
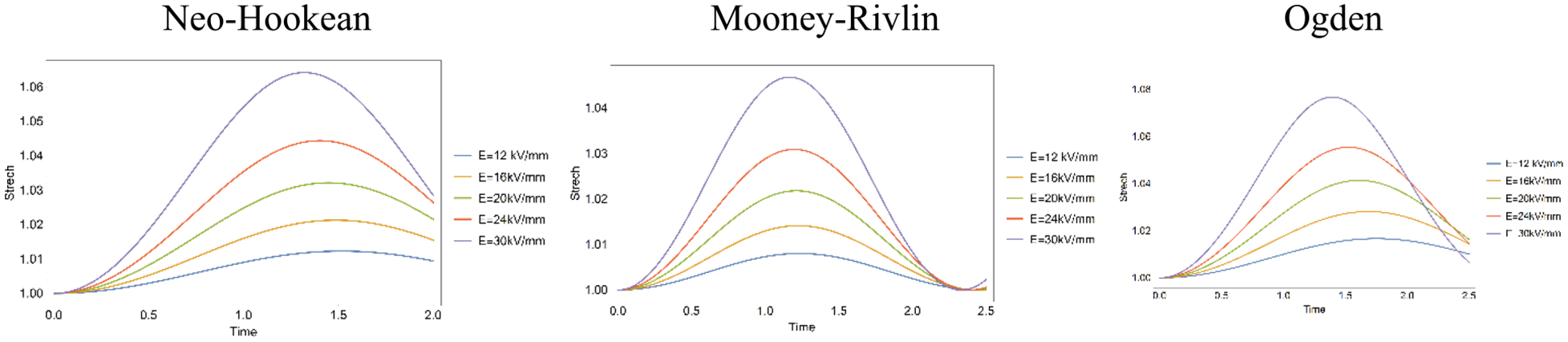
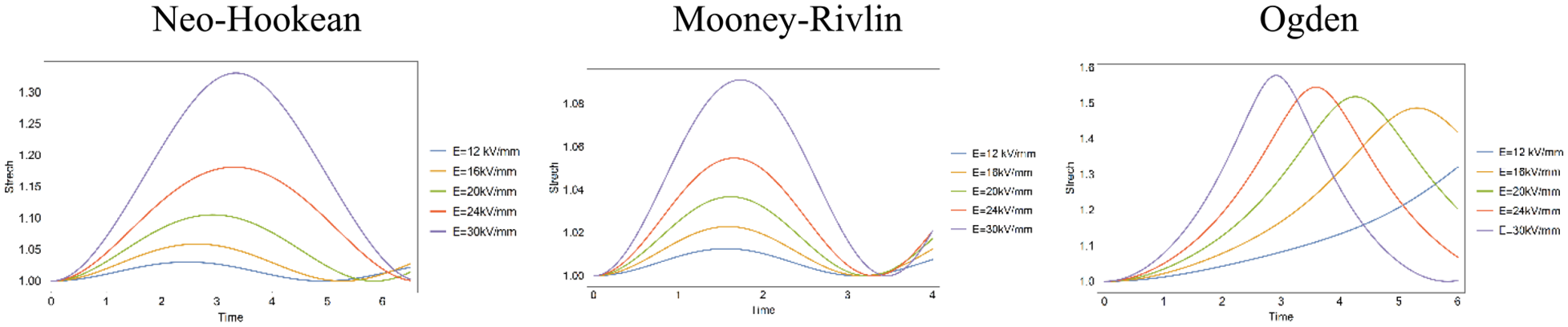
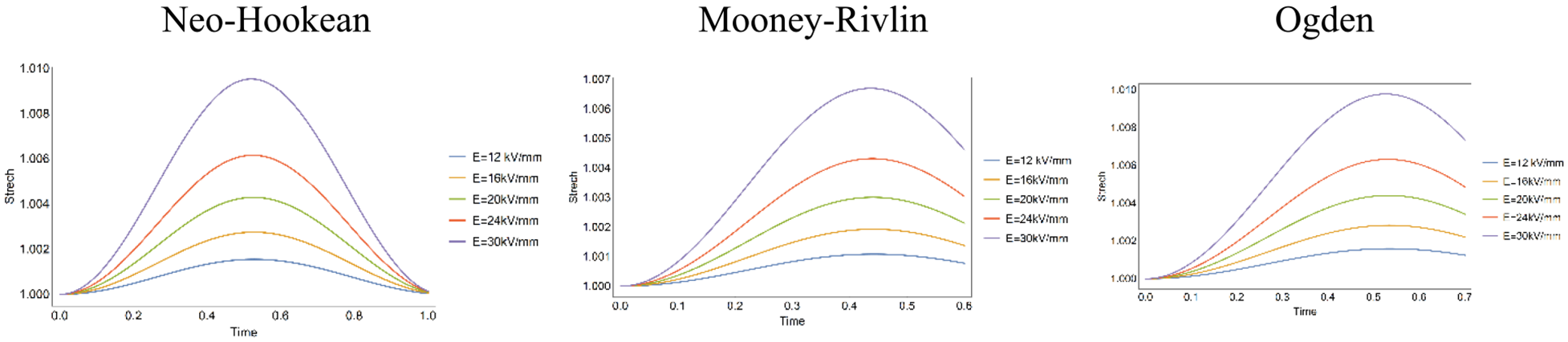
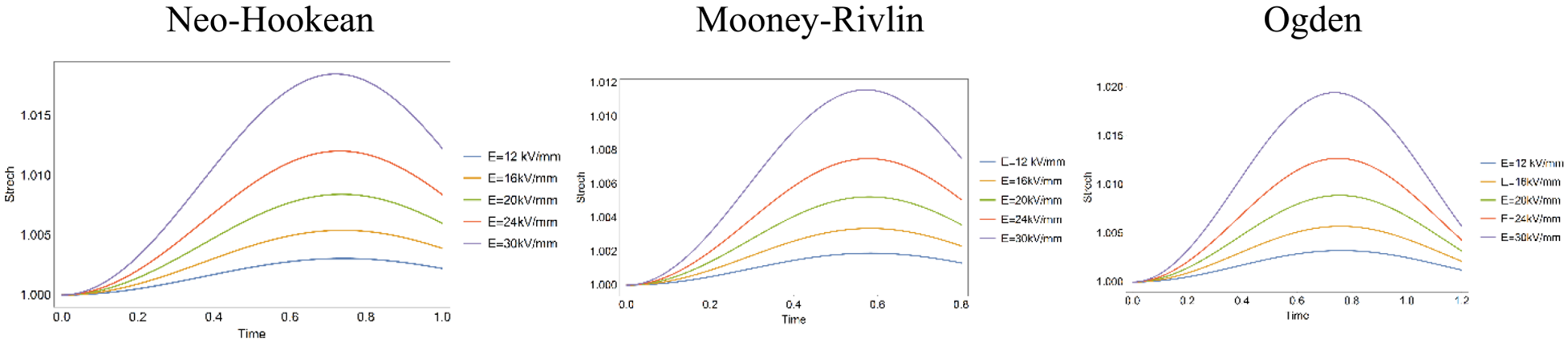
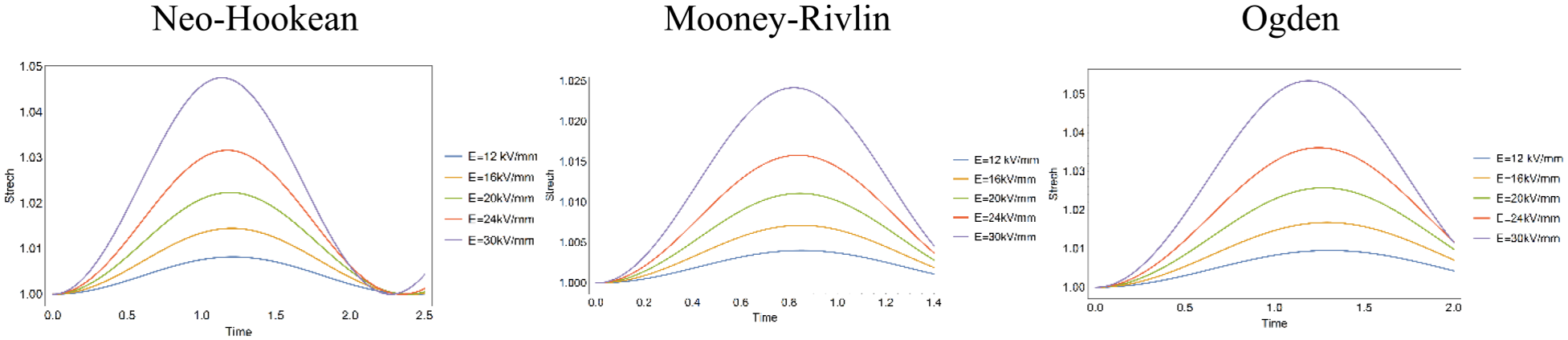
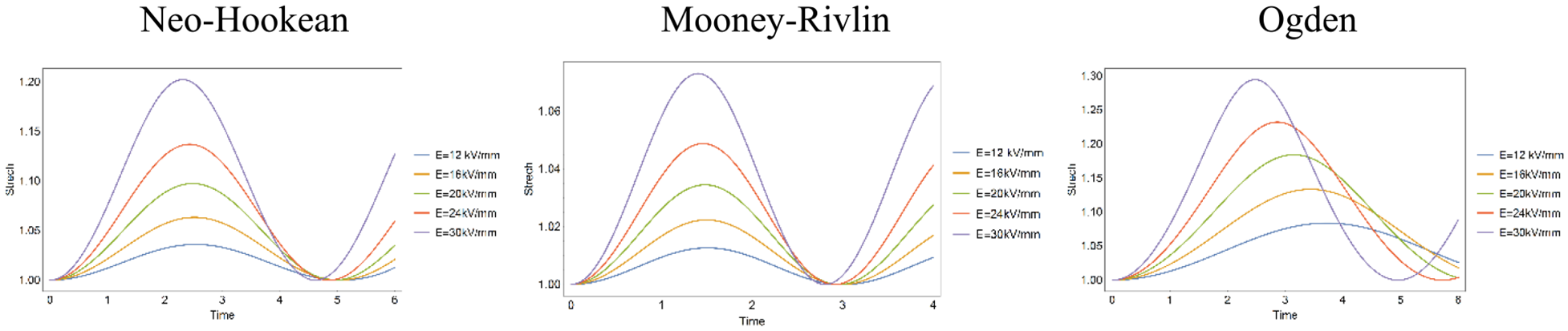
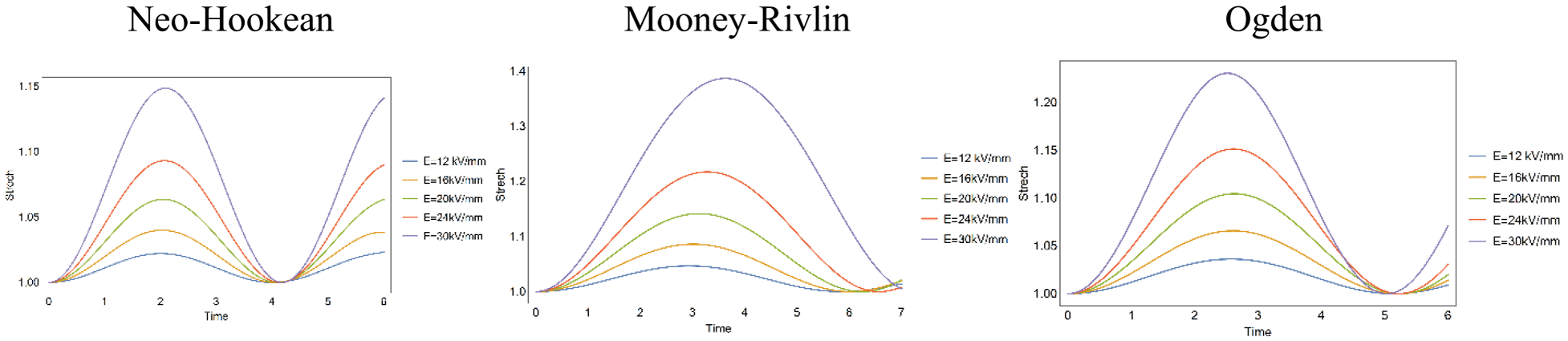
Based on Figures 29 to 38, rising the electrical field leads to a rise in voltage, therefore a larger equilibrium stretch and a longer deformation time are expected. The reason is that increasing the electric field has a strong effect on the molecules in the polymer and makes them less closely aligned with each other. It should be noted that after a certain amount of applied electric field the stretch ramps up instead of reaching stability. For the smallest electric field,
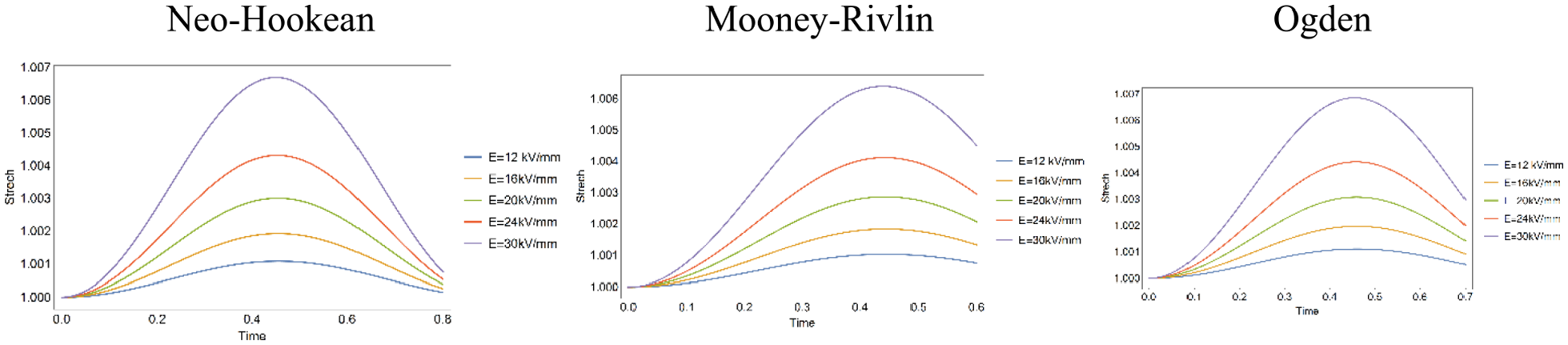
The performances of the ADE under electric field with various models for uniaxial tension and
The performances of the ADE under electric field with various models for uniaxial tension and
The performances of the ADE under electric field with various models for uniaxial tension and
The performances of the ADE under electric field with various models for uniaxial tension and
The performances of the ADE under electric field with various models for uniaxial tension and
The performances of the ADE under electric field with various models for pure shear and
The performances of the ADE under electric field with various models for pure shear and
The performances of the ADE under electric field with various models for pure shear and
The performances of the ADE under electric field with various models for pure shear and
The performances of the ADE under electric field with various models for pure shear and
The detailed responses are plotted in Figures 39 to 41. The actuation frequencies
The performances of the ADE under exited frequency
The performances of the ADE under exited frequency
The performances of the ADE under exited frequency
4. Conclusions
The presence of fibers in the elastomer has an extraordinary effect in improving the performances of the DE. The anisotropy is considered because the fiber-reinforced materials have special abilities such as high response and capability of higher force output. Therefore, in this study, the nonlinear field theory of ADEs is utilized to provide explicit expressions for the nonlinear governing equations of motion of an ADE by giving practical hyperelastic theories function. Because of ADEs’ nature, their mechanical properties can extremely effect by the application of an electric field. Therefore, employing the Helmholtz free energy functions considering the dissipation processes the nonlinear Lagrange equations are derived and analyzed with Neo-Hookean, Mooney-Rivlin, and Ogden material properties. The ADE is ideal and the permittivity is not considered anisotropic. Furthermore, the electrodes coated on both side of the ADE have no electrical resistance. Based on numerical results, such as the oscillation and phase diagrams the influence of fibers’ existence is fully presented. Moreover, by comparing the hyperelastic models for uniaxial tension mode and pure shear mode, it can be seen that the fibers orientation and the induced electric field have both special effects on the nonlinear behavior of ADE. Therefore, because of the importance of the quick dynamic response of smart materials with a dispersion-type anisotropy to the external electric field in smart manufacturing technologies, an analytical model is proposed and developed to present the useful and applicable results this field.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Ethical statement
The article was conducted according to ethical standards.