
Abstract
Shape memory alloys present remarkable thermomechanical behaviors due to solid phase transformations. The complexity of the involved phenomena makes the constitutive modeling of this class of smart material a challenging subject. Considering the different approaches presented in the literature, the constitutive models with assumed phase transformation kinetics are popular, achieving reasonable results. This paper deals with one-dimensional constitutive models that employs a novel strategy to describe phase transformation kinetics using polynomial functions. Three different polynomial functions are treated: linear, quadratic, and cubic. Besides, the novel approach defines the phase transformation surfaces in such a way that allows the description of new phenomena including tension-compression behaviors and two-way shape memory effect. Experimental data compiled from the literature guides the investigation treating temperature-induced phase transformation; pseudoelasticity; one-way and two-way shape memory effects; internal subloops due to incomplete phase transformations. Numerical simulations are carried out comparing the novel functions with the classical cosine function. Results indicate that the model with polynomial phase transformation kinetics is able to capture the main features of SMA thermomechanical behavior. The investigation shows that the cubic polynomial is equivalent to the cosine function and the linear polynomial presents good estimations, being related to low computational cost since it avoids iterative approaches for strain-driven cases.
Keywords
Introduction
Shape memory alloys (SMAs) are active, functional, smart materials with unique capabilities related to the thermomechanical couplings of solid-solid martensitic phase transformations (Lagoudas, 2008). SMAs have been employed in several applications exploiting two main characteristics associated with hysteretic behavior: shape memory effect, related to large recoverable strains induced by thermomechanical loadings; and pseudoelasticity or superelasticity, associated with large strains and high dissipation capacity (Savi et al., 2016; Thomas et al., 2025).
Aerospace industry is one of the most important fields of SMA applications (Hartl and Lagoudas, 2007; Leal and Savi, 2018; Silva et al., 2022). Nevertheless, the literature presents many other areas including oil and gas industry (Liu et al., 2024b; Silva et al., 2021), robotics (Kim et al., 2023; Pan et al., 2025; Ruth et al., 2022), and biomedical applications (Chaudhary et al., 2024; Machado and Savi, 2003; Sima et al., 2024). Recently, SMA morphing structures have evolved to employ origami-inspired structures (Fonseca et al., 2022; Peraza-Hernandez et al., 2014), being related to different kinds of innovations. Additional discussions of SMA applications in different areas are presented in Jani et al. (2014), Gantz et al. (2022), Dalave et al. (2024), and Kumar et al. (2024).
Temperature-dependent behavior of SMA can be employed to provide adaptiveness to mechanical systems (Nozaki et al., 2021). Since the SMA properties vary with phase and therefore with temperature, stiffness change is exploited in distinct situations including dynamical applications (Savi, 2015; Sohn et al., 2023). Rotordynamics is an example where temperature changes promote the adaptive behavior of rotor systems, allowing the control of critical speeds (Jin et al., 2024; Preto et al., 2023). The synergistic use of smart materials is another application with a growing interest. In this regard, the combination of SMAs with piezoelectric materials allows the development of adaptive energy harvesters with enhanced capabilities (Adeodato et al., 2021; Liu et al., 2021).
Hysteretic dissipation is also employed in dynamical applications (Savi, 2015; Tabrizikahou et al., 2022). This dissipation is useful in civil structures, especially the ones subjected to severe loads as earthquakes (Fang, 2022; Liu et al., 2024a; Vignoli et al., 2020). Stroud and Hartl (2023) proposed an innovative application of SMA wires to construct a 2D knitted structure to be subjected to high loads. Del Core et al. (2025) investigated the use of SMAs to preserve historical structures.
The effectiveness of SMA to mitigate crack growth propagation in steel structures was demonstrated by Wang et al. (2024) and Li et al. (2025). Debossan and Vignoli (2022) presented finite element simulations indicating that the inclusion of SMA layers can avoid impact damage in composite plates. Wang et al. (2025) proposed an analytical model for the impact behavior in SMAs based on the wave propagation theory. The benefits of including SMA reinforcement in composite plates subjected to impact loads was also demonstrated by Brack and Ghasemnejad (2025).
The SMA modeling is associated with distinct approaches focused on different scales and due to several phenomena involved (Lagoudas, 2008; Shaw and Kyriades, 1995; Wang et al., 2021), is a complex task. An overview of the most relevant constitutive models to describe the macroscopic behavior of SMAs is presented by Paiva and Savi (2006), Lagoudas (2008), Khandelwal and Buravalla (2009), Cisse et al. (2016a, 2016b), and Chowdhury (2018). Multiscale perspective is discussed by Liu and Dong (2024) that employed a three-phase micromechanical model while Zhu et al. (2025) discussed a molecular dynamics simulation to evaluate the influence of porosity.
Data-driven multidisciplinar models were also proposed as an interesting alternative to describe SMA thermomechanical behavior, presenting simplicity as the main characteristics (Honrao et al., 2023; Trehern et al., 2022). The Preisach model should be highlighted to describe generalized hysteresis (Alvares et al., 2024; Mayergoyz, 2003), being also employed for different smart materials. Recently, Dornelas et al. (2025, 2026) proposed a novel prismatic approach that generalizes the Preisach model to incorporate distinct phenomena. This new approach allows the description of temperature-dependent behavior and more complex phenomena as transformation induced plasticity. Artificial neural networks are also a possibility to for data-driven models (Wang and Wang, 2021).
Regarding the SMA constitutive models, the models with internal constraints present a solid mechanical foundation based on continuum mechanics and thermodynamics. In this regard, several approaches can be identified based on plasticity theoretical framework (Auricchio and Sacco, 1997; Souza et al., 1998; Yang et al., 2023), phase transformation forces (Boyd and Lagoudas, 1996), and Fremond’s theory (Dornelas et al., 2021; Fremond, 1987; Oliveira et al., 2016; Paiva et al., 2005). It should be pointed out the challenges related to the description of complex phenomena that includes transformation induced plasticity, classical plasticity, rate-dependent behavior, functional and structural fatigue, among others, which are even more complex considering three-dimensional media.
There is a class of constitutive models with assumed phase transformation kinetics that are attractive due to their simplicity and good match with experimental data. The pioneer work of Tanaka and Nagaki (1982), Tanaka (1985), Tanaka et al. (1986), and Tanaka et al. (1994) assumed an exponential function to describe the phase transformation kinetics, allowing a proper constitutive description of SMAs. Afterward, other alternative functions were proposed by Liang and Rogers (1990), Boyd and Lagoudas (1994) and Ivshin and Pence (1994), typically considering cosine functions. Brinson (1993) improved this class of model by considering different perspectives. Although the model is still using the cosine function, two variants of martensite were introduced: twinned and detwinned. Besides, different properties for each phase were adopted, enhancing the SMA description.
He et al. (2023) proposed a modification of the Brinson’s model using different cosine functions for a better description of the experimental behavior. Ren et al. (2007) used the error function, Wang et al. (2019) proposed hyperbolic functions, and Zhang et al. (2024) considered logistic functions. Adeodato et al. (2022) considered quadratic polynomial function split into two phase transformation regions. Despite the undeniable advances related to SMA modeling, the simplification for engineering applications is still desirable, as claimed by Medina et al. (2023).
This paper deals with a novel one-dimensional classified in the group of assumed phase transformation kinetics model. Polynomial functions are employed to describe the phase transformation kinetics, evaluating linear, quadratic, and cubic polynomials. Besides, novel phase transformation surfaces are defined in such a way that allows the description of new phenomena including tension-compression behaviors and two-way shape memory effect. Numerical simulations are carried out to describe the main thermomechanical behaviors of SMAs: pseudoelasticity, shape memory effect – one- and two-way, temperature-induced phase transformation and internal subloops. A comprehensive analysis of polynomial phase transformations is developed using experimental data compiled from the literature, attesting the model capabilities. Results are compared with the classical cosine function, showing that the polynomial function is an interesting alternative to describe SMA phase transformation kinetics.
After this introduction, the mathematical formulation of the constitutive models is presented in Section 2. The details related to the numerical implementations are presented in Section 3. The models are compared with four sets of experimental data compiled from the literature in Section 4. Finally, the main conclusions are summarized in Section 5.
SMA constitutive models with assumed kinetics
SMA remarkable characteristics are related to thermomechanical couplings represented by different phenomena. Phase transformation is the main phenomenon behind the macroscopic behavior of SMAs and two distinct phases should be identified: austenite, stable at high temperatures in stress-free state; and martensite, stable at low temperatures in stress-free state. Austenite is related to only one variant while martensite can present several variants where preferential cases are defined from external stress field.
The macroscopic thermomechanical behavior of SMAs is described by constitutive models that needs to be thermodynamically consistent. On this basis, it needs to respect the second law of thermodynamics, represented by the Clausius-Duhen inequality (Lemaitre and Chaboche, 1990). State variables are needed to establish this description, and it is usual to consider the strain, ε, and the temperature, T, as the observable variables. Besides, internal variables should be defined to describe phase transformations and the martensitic volume fraction, β, is usually employed.
By considering that the martensitic volume fraction is split into two variants,

where the dot indicates the time derivative; E is the elastic modulus; Ω is the phase transformation parameter; and γ is the coefficient related to thermal expansion. Note that the parameter Ω can be estimated from the maximum recoverable strain,
In general, properties are different for each phase and therefore, they need to be defined by a kind of rule of mixtures. On this basis, it is possible to write:


where M represents martensite and A represents austenite.
The phase transformation kinetics is represented by a function
The critical stresses and temperatures that define phase transformations need to be identified by a critical phase transformation surface. By considering the stress-driven austenite-martensite (forward) transformation




where
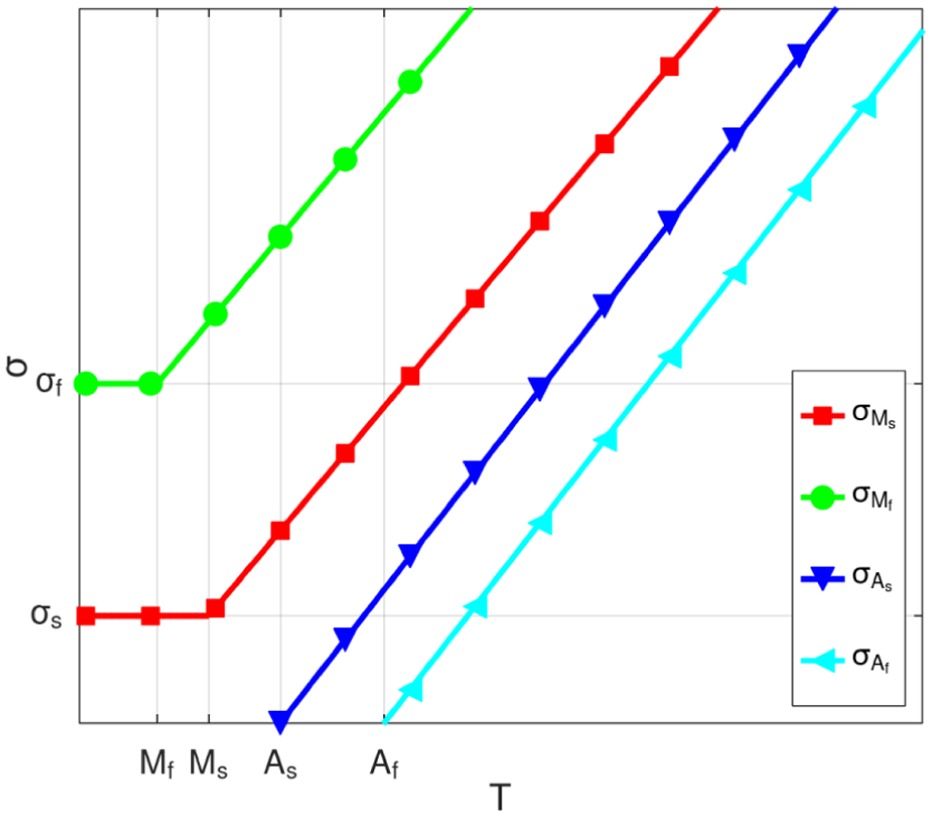
Phase transformation critical surfaces based on Brinson (1993).
The inclusion of the residual stress field
It can be established that the stress-induced austenite-martensite transformation occurs when the condition

where the subscript “0” denotes the quantities in the initial state;
For the stress-induced martensite-austenite transformation, it can be established that the condition



where
Therefore, the phase transformation kinetics is described by the functions
Brinson’s model
The assumed function for the phase transformation kinetics is the key for the SMA constitutive description. The pioneer work of Tanaka and Nagaki (1982) employed an exponential function, but the cosine alternatives were employed in several references with a good performance (Boyd and Lagoudas, 1994; Ivshin and Pence, 1994; Liang and Rogers, 1990). Brinson (1993) proposed the following cosine functions to represent phase transformation kinetics:



Polynomial models
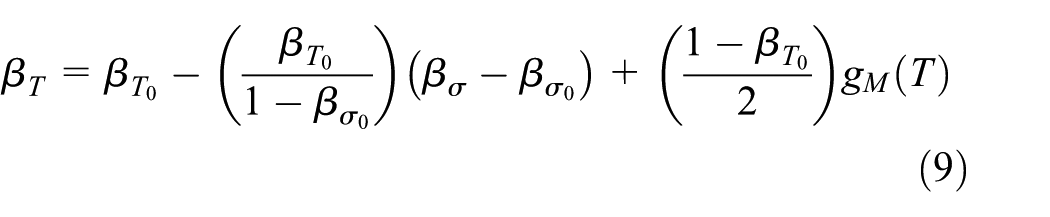
This work proposes the use of polynomial functions for the SMA phase transformation kinetics. In a general way, different polynomial order functions are employed, using transformation conditions to define the coefficients. In this regard, the following equations are adopted:



where
Transformation conditions for the polynomial functions.
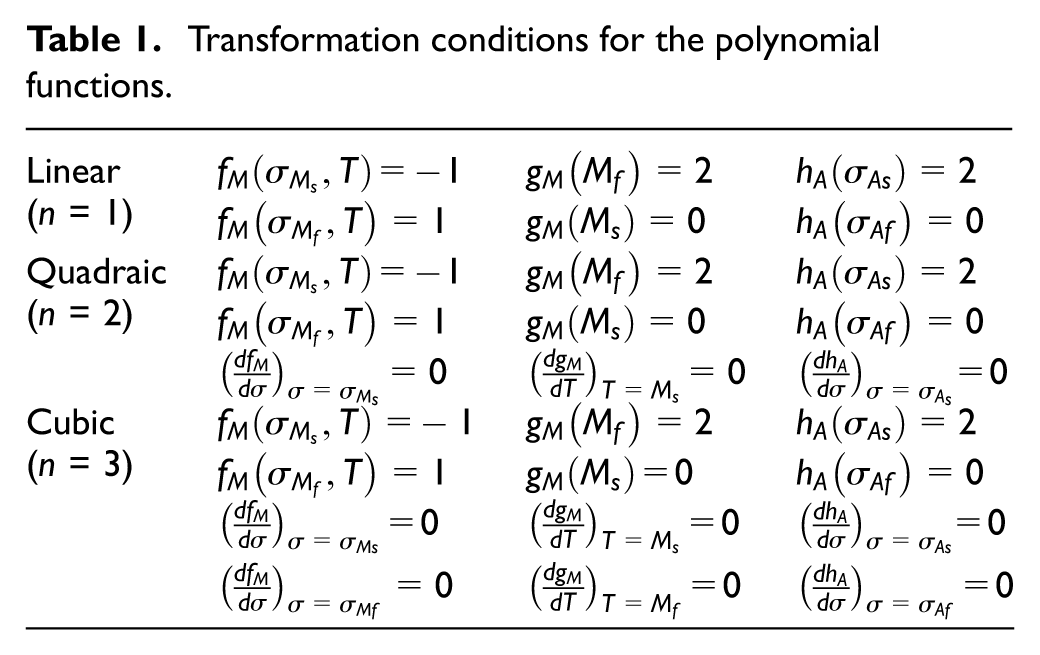
On this basis, each polynomial kinetics is discussed in the sequel.
Linear polynomial
The linear polynomial phase transformation kinetics considers a function of the form,



By applying the transformation conditions, it is reached the following functions:



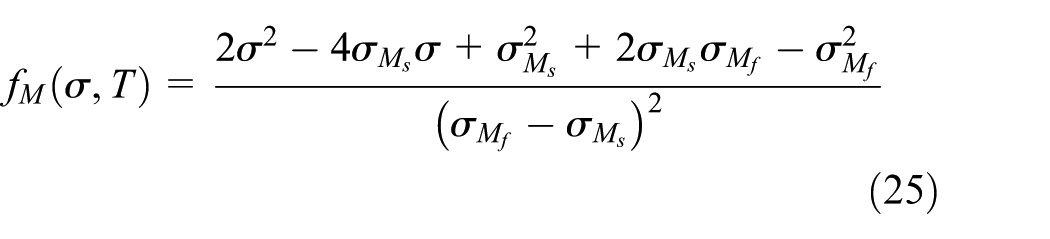
Quadratic polynomial
The quadratic polynomial phase transformation kinetics considers a quadratic function and, by applying the phase transformation conditions, the following equations are obtained considering analogous procedure of the linear polynomial,


Cubic polynomial
The cubic polynomial phase transformation kinetics considers a third order function and, by applying the phase transformation conditions, the following equations are obtained,



Parameter characterization
This section presents details about the SMA characterization, showing the experimental tests developed to define the constitutive parameters. Essentially, material characterization is performed by considering thermomechanical tests. The evaluation of phase transformation temperatures employs differential scanning calorimeter (DSC) while mechanical properties are defined from quasi-static tensile tests performed in a testing machine.
In order to present the material characterization, experimental tests are carried out on a pseudoelastic Ni56Ti44 (wt.%) wire in its as-received condition, manufactured by Sandinox Biomaterials. The wire has a circular cross-section with a diameter of 1.3 mm. A DSC NETZSCH Maia 200 F3 is employed together with quasi-static tensile tests using an Instron 5882 electromechanical testing machine equipped with a 30 kN static load cell and displacement-based strain measurement employing a gage length of 100 mm. A thermal chamber is also employed to conduct tests at various temperatures.
The analysis of the phase transformation temperatures is conducted through DSC tests using a virgin wire sample. The sample is heated from room temperature to 120°C and subsequently cooled to −120°C, repeating this thermal cycle. Figure 2 presents results of the test, highlighting the transformation temperatures of the start and finish of austenitic formation (
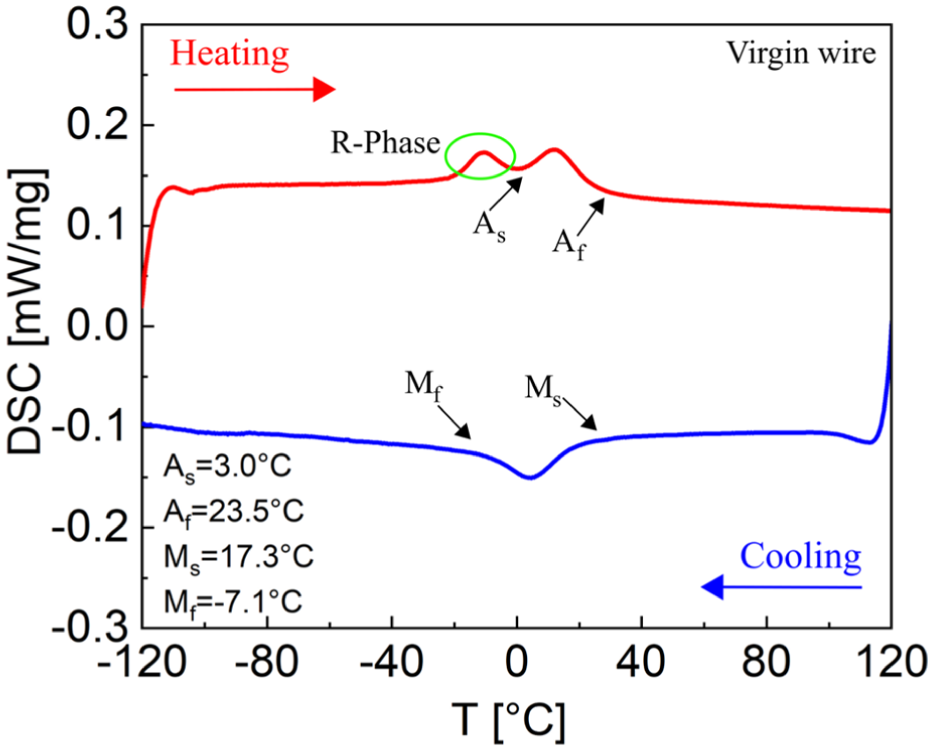
Phase transformation temperatures through DSC thermal analysis of the virgin NiTi wire.
After the thermal analysis, mechanical characterization is of concern. Initially, the cyclic response of the SMA sample is assessed by subjecting a specimen to a training process using a quasi-static cyclic tensile test, conducted at a peak stress of 900 MPa with a stress rate of 150 MPa/min. The training involves repeated cyclic mechanical loading until a stabilized response is achieved. This stabilization process is related to the transformation induced plasticity (TRIP) strain stabilization that ensures the repeatability of the material behavior throughout the cycles (Oliveira et al., 2018). Figure 3(a) illustrates the stress-strain curves obtained over 29 cycles, highlighting the comparison between the first and last cycles showing the TRIP strain stabilization, the progressive reduction of hysteresis loop size, and the decrease of critical stresses associated with phase transformations. In addition, Figure 3(b) presents the strain evolution of the specimen throughout the cycles, revealing that stabilization occurs after approximately 20 cycles.
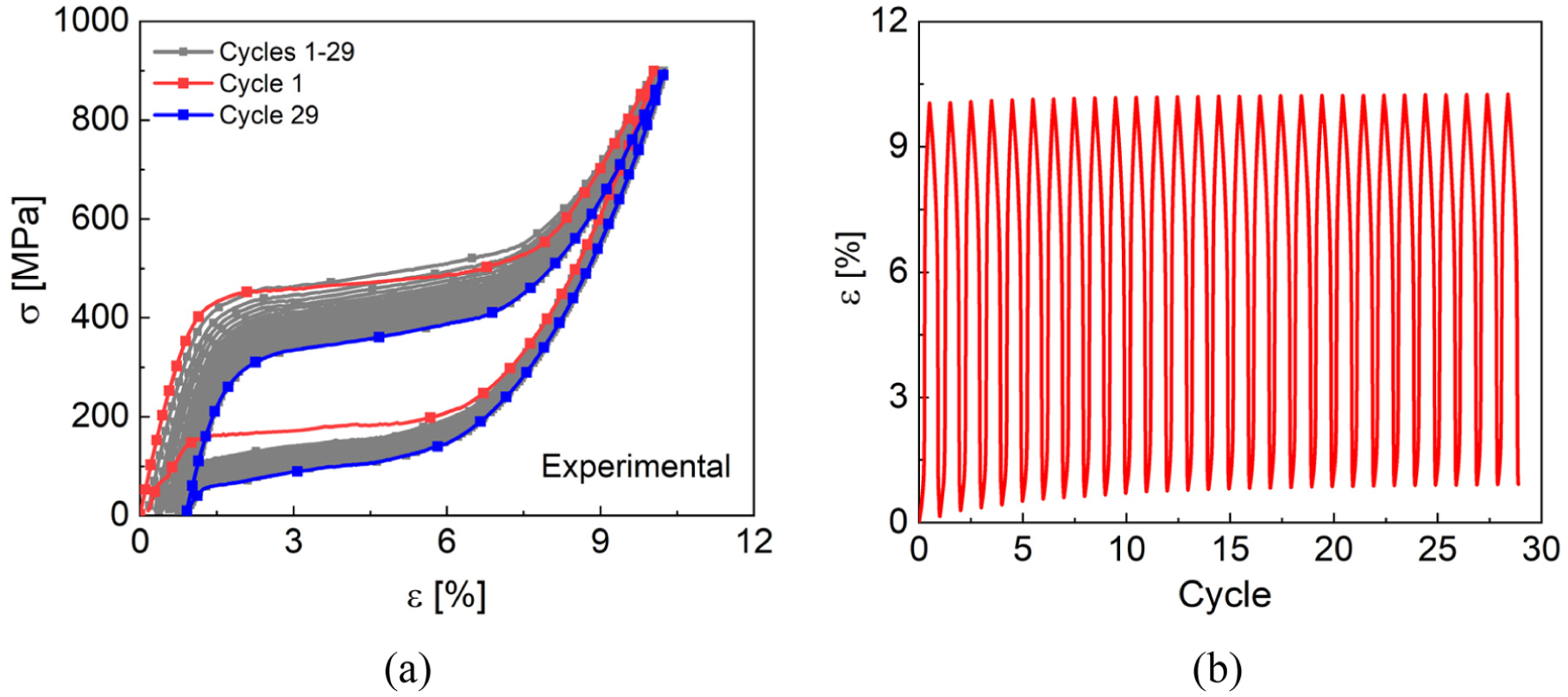
Training procedure of a pseudoelastic NiTi wire at a temperature of 30°C, at a maximum stress of 900 MPa, and a loading rate of 150 MPa/min: (a) cyclic stress-strain response and (b) TRIP strain stabilization throughout the cycles.
After the training procedure, a macroscopic evaluation of the SMA mechanical behavior is conducted based on the stress-strain curves at different temperatures. Figure 4 presents stress-strain curve at 40°C (above
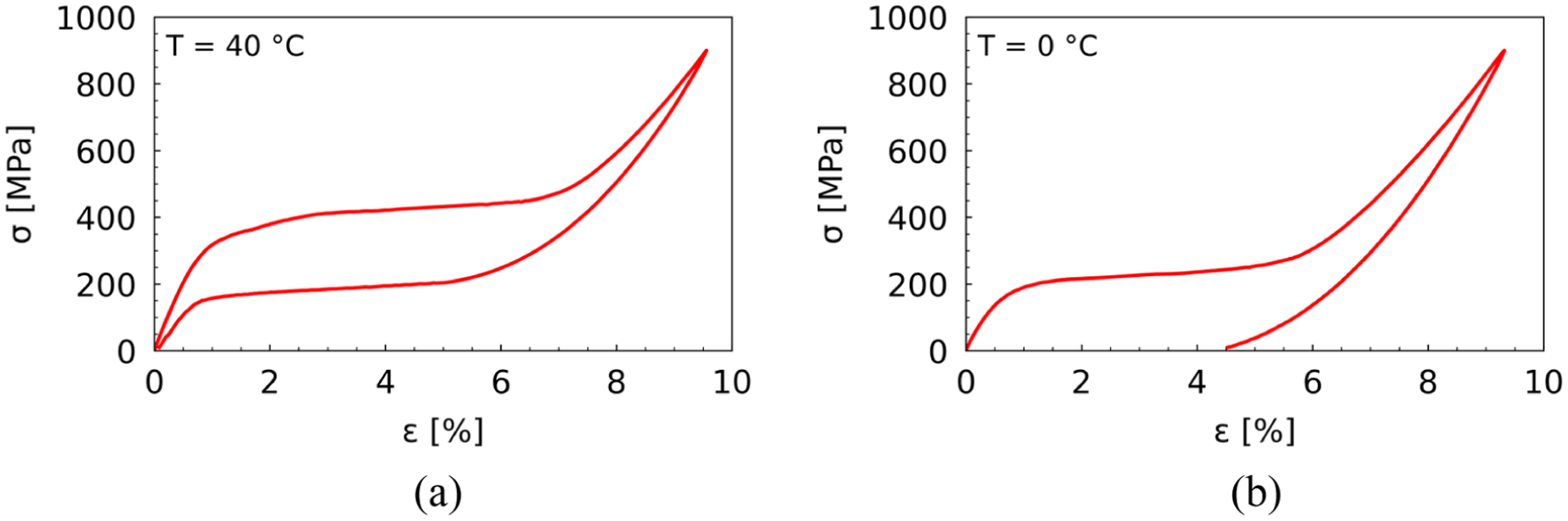
Stress-strain curves considering different temperatures conducted from a sample initially trained at 30°C, considering a maximum stress of 900 MPa, and a loading rate of 150 MPa/min: (a) 40°C and (b) 0°C.
The SMA characterization needs to define all the constitutive parameters including phase transformation critical stress for direct (
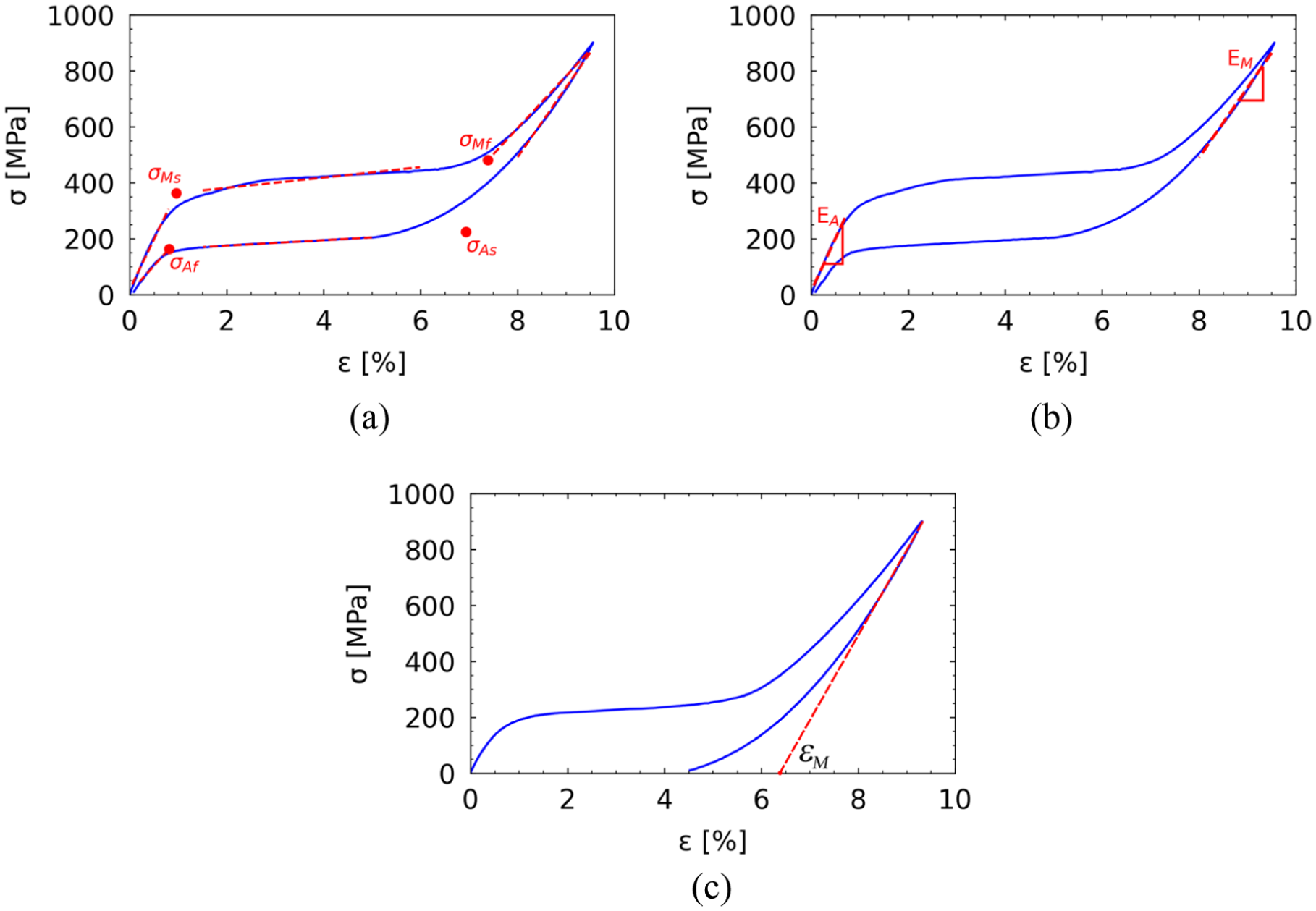
SMA constitutive parameters: (a) critical stresses, (b) elastic modulus for austenite and martensite, and (c) maximum recoverable strain
Phase transformations are defined from the critical transformation surfaces. The relationship among temperature and phase transformation critical stresses is defined by constants
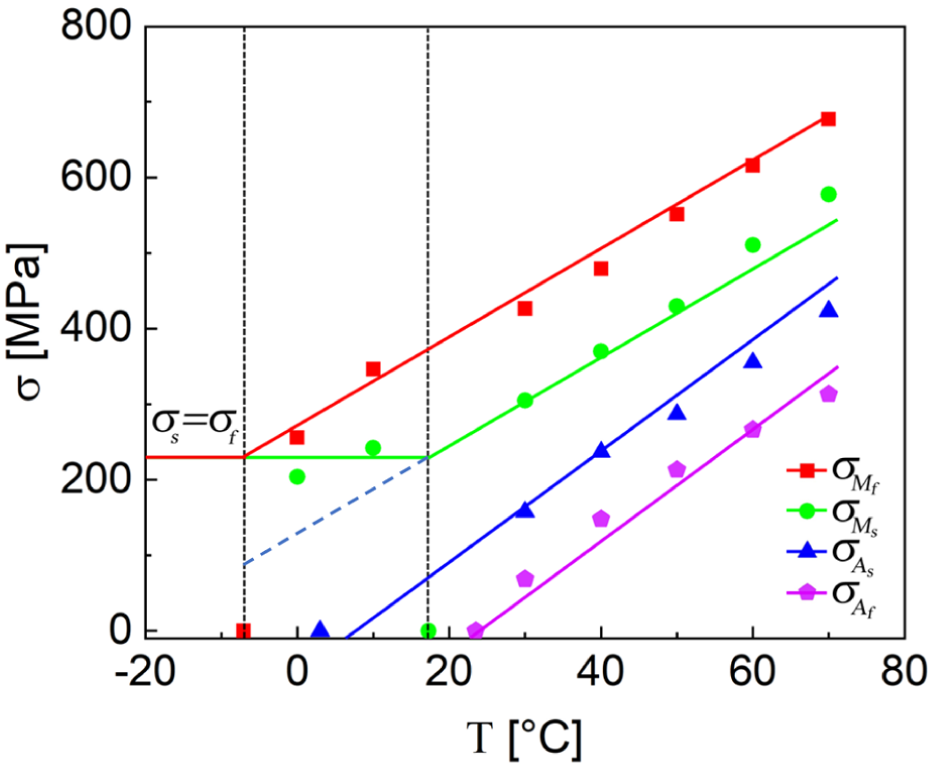
Phase transformation critical surfaces.
Considering temperatures below
Based on these tests and related approaches, the SMA is characterized, and all constitutive parameters are defined. Table 2 summarizes all these parameters.
Constitutive parameters of the NiTi alloy defined from experimental tests.

Numerical procedure
The numerical implementation of the constitutive equations considers a time integration that allows to write the following discrete version that should be evaluated together with the assumed function for transformation kinetics:

Analysis can be performed by considering stress-driven, temperature-driven, and strain-driven cases and the essential point is the definition of phase transformation domains. On this basis, stress-driven and temperature-driven cases allow a direct determination of the phase transformation surfaces since they are defined by stress-temperature functions and both are known.
On the other hand, strain-driven cases need to use a predictor-corrector algorithm, estimating a trial stress that allows the evaluation of the transformation surfaces. From both information, the actual state is defined. This methodology is a typical predictor-corrector approach.
The classical return-mapping algorithm is an example of a predictor-corrector approach for plasticity (Simo and Hugles, 1998) while the projection algorithm is its counterpart for phase transformations (Oliveira et al., 2016). Essentially, a trial elastic state is defined followed by an evaluation of an inelastic evolution; if there is an inelastic evolution, a correction is needed, and the trial state is corrected by a projection that leads to the actual state. The classical plasticity promotes the projection to the yield surface and the inelastic evolution is related to plastic strains. On the other hand, the phase transformation problem needs to promote the projection to the phase transformation surfaces and the inelastic evolution is related to volume fraction evolution.
By considering the strain-driven phase transformation case, the inelastic evolution needs to define the phase transformation surfaces, characterized by unknown strain bounds since they are defined from stress values. Therefore, assuming an elastic step from a known previous state, a trial state is defined by considering that phase transformation does not occur. The trial stress allows the evaluation of phase transformation surface and, if the strain is inside the inelastic domain, the actual state should be recalculated estimating the martensitic volume fraction, which requires an iterative process to solve a nonlinear equation. A projection algorithm can be employed and alternatively, an optimization algorithm can be implemented to minimize the difference between the trial and actual states.
Golden section algorithm
Phase transformations are essentially characterized by the critical stress values for the start and finish of these transformations. Therefore, the martensitic transformations are defined by


In order to introduce the algorithm, consider a known state (
Otherwise, if
Note that
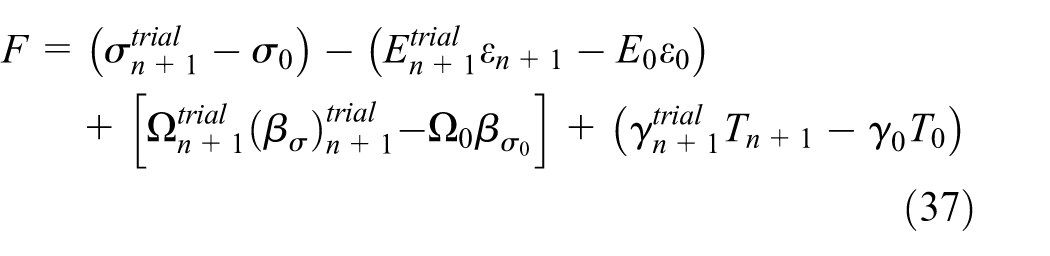
To find the root of F that satisfies the limit conditions associated with the critical stresses, the golden section method is applied (Ji et al., 2022; Koupaei et al., 2016). First, the lower and upper limits of the trial stress solution are defined as
Four different points are evaluated within the domain




where
Once the trial stress solutions are defined using equations (38)–(41), these parameters are replaced into equation (37) to compute the values of
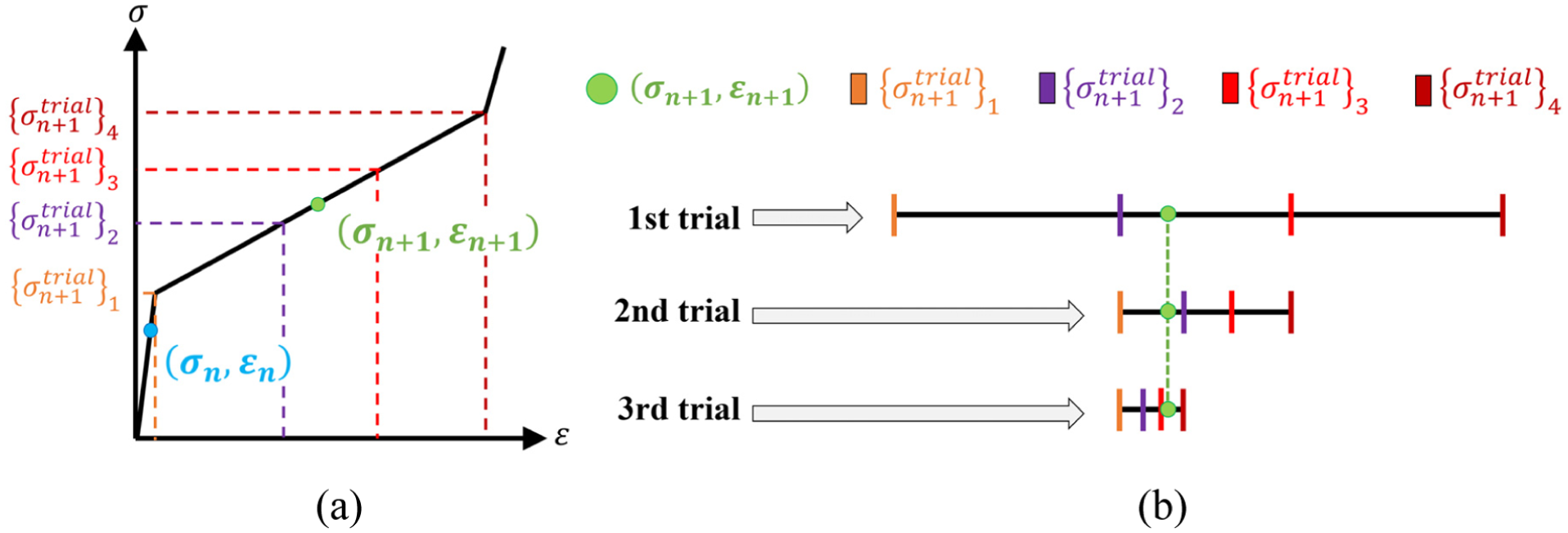
Schematic representation of the golden section algorithm: (a) stress-strain curve considering the previous state (
Linear phase transformation kinetics
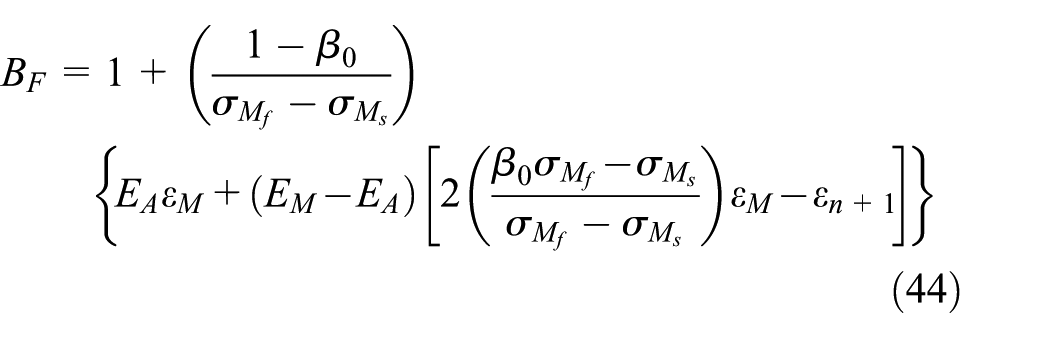
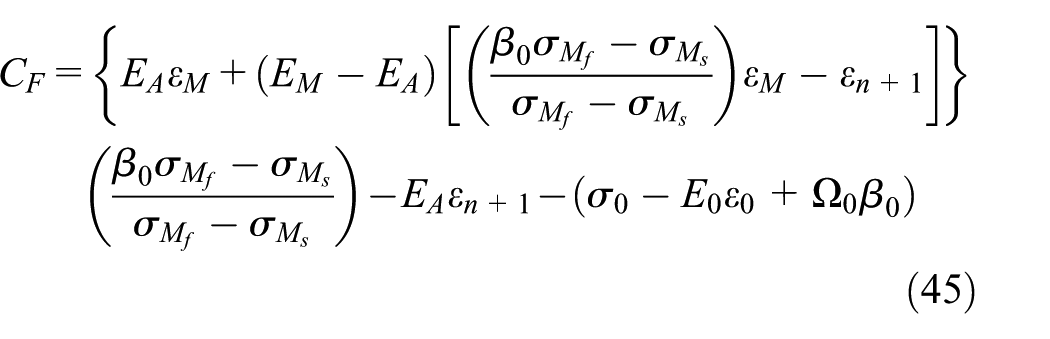
By considering the linear polynomial kinetics, an analytical solution is available to define the inelastic response, avoiding the iterative procedure. Therefore, consider the strain-driven case with
For the austenite-martensite (forward) transformation, the stress solution is defined by

where

For the martensite-austenite (reverse) transformation, the stress solution is defined by

where

Numerical simulations
SMA thermomechanical behavior is now of concern considering the assumed phase transformation kinetics. The different polynomials and the classical Brinson’s model are compared with sets of experimental data, obtained from different references, representing distinct macroscopic phenomena: temperature-induced phase transformation with constant stress; pseudoelasticity; one-way shape memory effect; two-way shape memory effect; internal subloops due to incomplete phase transformation. The characterization procedure discussed in Section 3 is employed. Since different materials were used to obtain the experimental data employed as reference for distinct macroscopic phenomena, different model parameters values are employed in the numerical simulations.
A metric is adopted to establish a numerical-experimental comparison of each model. Basically, it is assumed the following discrepancy factor for each point:

where the parameter

where N is the total number of points considered in the analysis. Note that the number of points must be equal for the experimental and numerical calculations to properly compute this metric. All the models are implemented using the Octave-Matlab.
Temperature-induced phase transformation
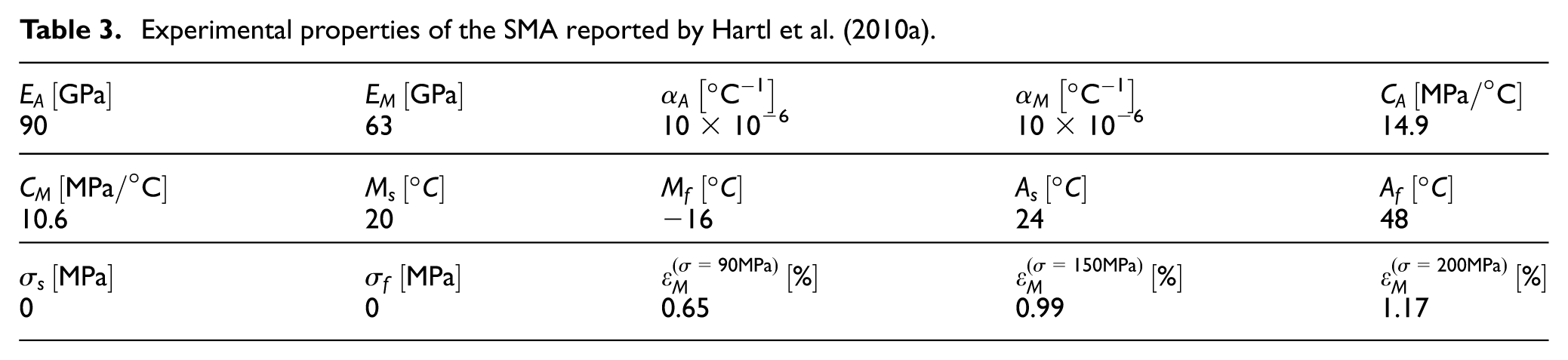
The temperature-induced phase transformation phenomenon is of concern, investigating the influence of the constant stress levels using the experimental data by Hartl et al. (2010a) as reference. The constitutive parameters are presented in Table 3, where it should be noticed that the maximum recoverable strain,
Experimental properties of the SMA reported by Hartl et al. (2010a).
The temperature-driven case assumes prescribed temperature and constant stress, estimating strain from constitutive equations. Initially, the sample is in austenitic phase with
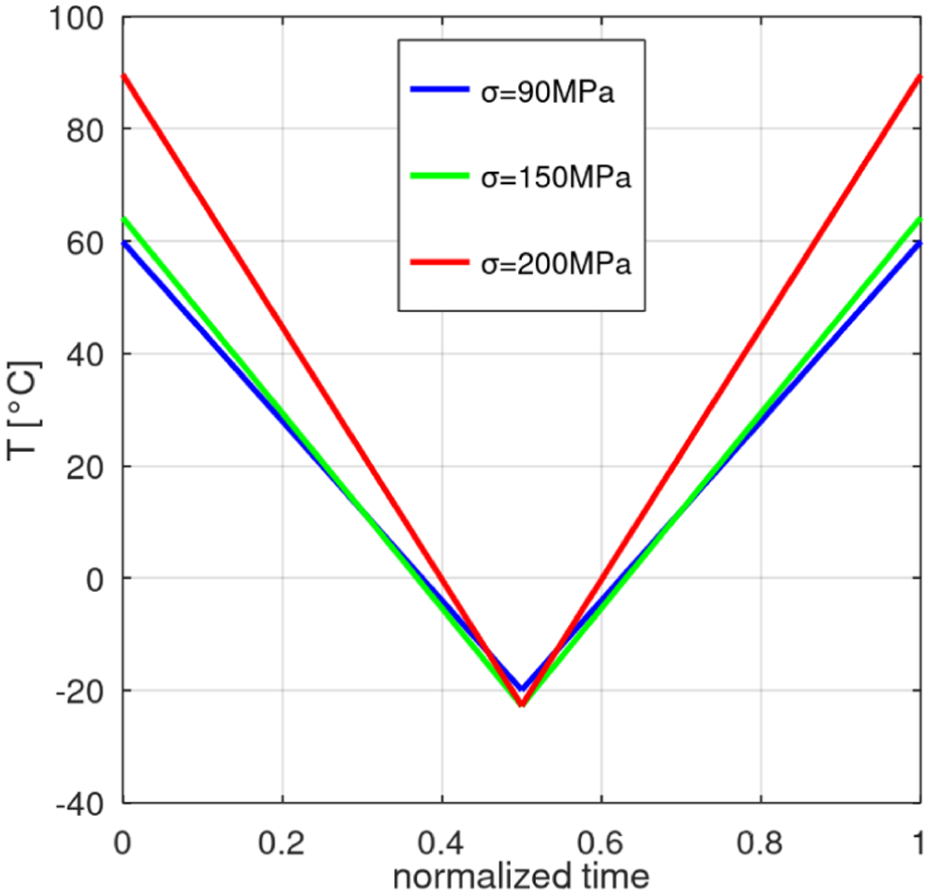
Temperature-driven loads for different constant stress levels from Hartl et al. (2010a).
Results of the strain-temperature curves predicted by the constitutive models are presented in Figure 9, together with experimental data. Without phase transformations, the strain variation is due to the thermal expansion. Note that the strain is almost constant in the regions with
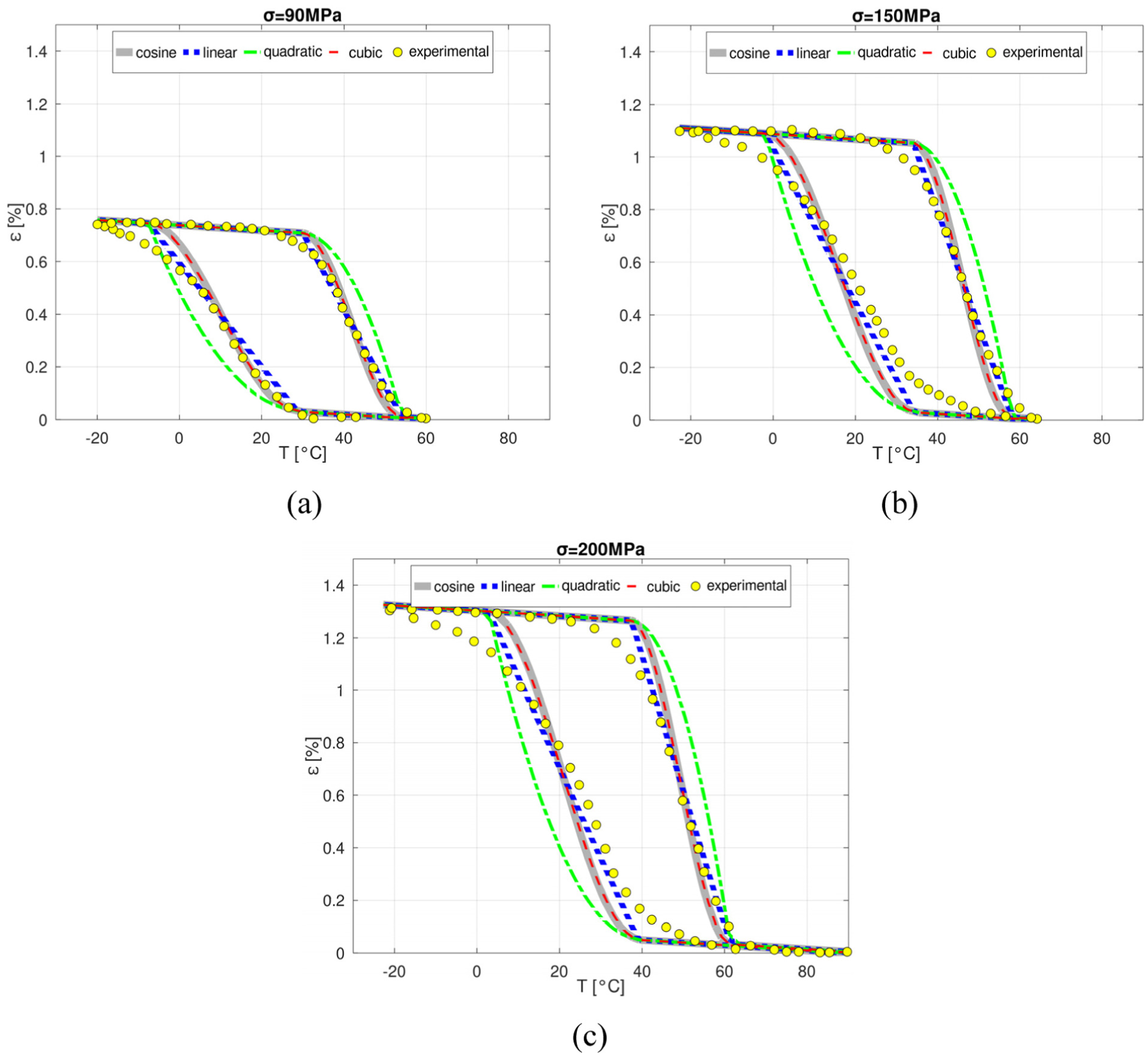
Temperature-induced phase transformation compared with experimental data by Hartl et al. (2010a): (a)
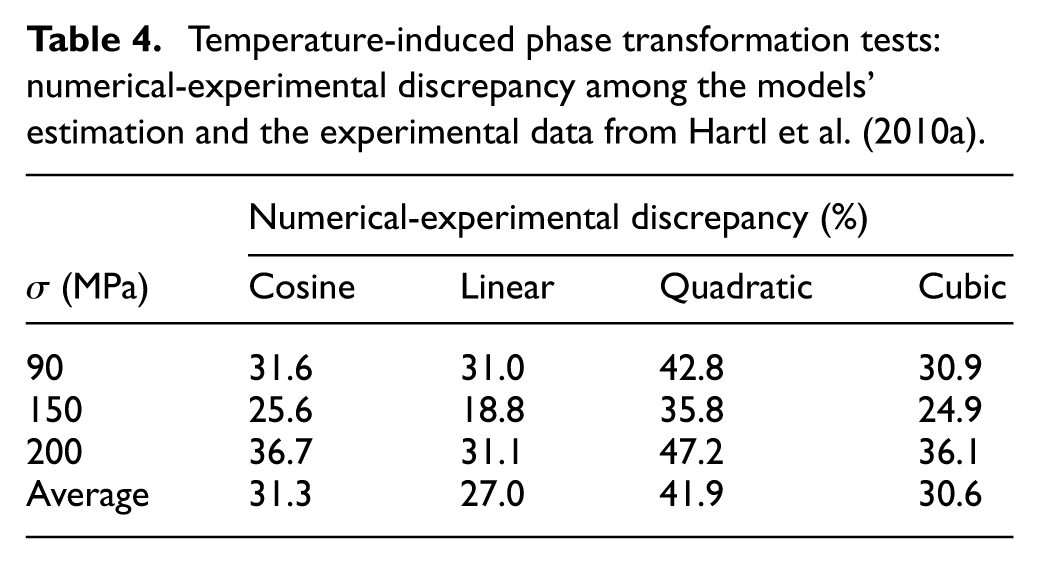
The analysis of numerical-experimental discrepancy metric is presented in Table 4. The linear function presents the smallest discrepancies in two of the three cases (
Temperature-induced phase transformation tests: numerical-experimental discrepancy among the models’ estimation and the experimental data from Hartl et al. (2010a).
Pseudoelasticity
The pseudoelasticity is now investigated considering the experimental data reported by Adeodato et al. (2022) using the constitutive parameters listed in Table 5. This set of experimental data considers, for each case, a strain-driven case with a constant temperature, while the stress is computed for each model. The strain load cycle is defined by
Experimental properties of the SMA reported by Adeodato et al. (2022).

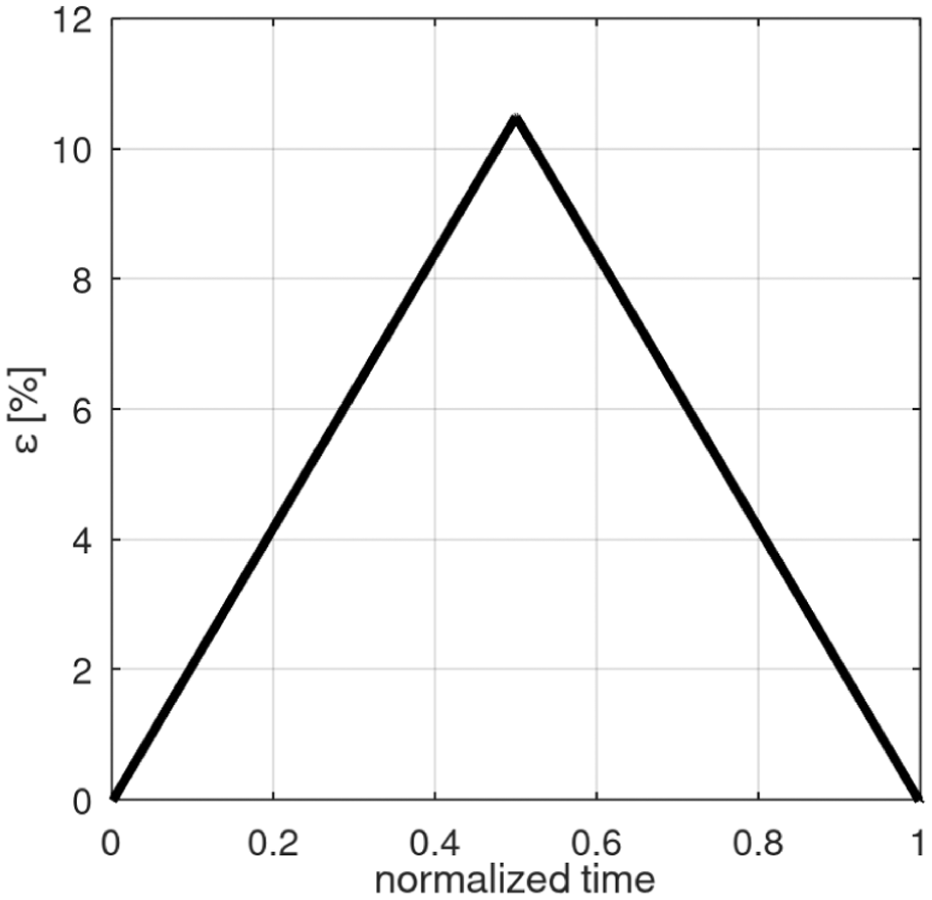
Pseudoelastic strain-driven load for
Results of the pseudoelastic tests are presented in Figure 11 for different temperatures. Essentially, the sample is initially at austenitic phase, being subjected to a strain-driven case and a constant temperature. Note that the loading-unloading induces the austenite-martensite phase transformation and, afterward, an elastic response occurs at the martensitic phase. The subsequent unloading promotes the reverse transformation that finishes with an elastic response in austenitic phase. It should be pointed out that after the loading-unloading process, the sample is in a stress-free state being subjected to a dissipation process associated with the hysteresis loop. It is also noticeable that the increase of temperature promotes a shift of the hysteresis loop. Once again, all models present a good agreement with experimental data and the cubic polynomial is close to the cosine function.
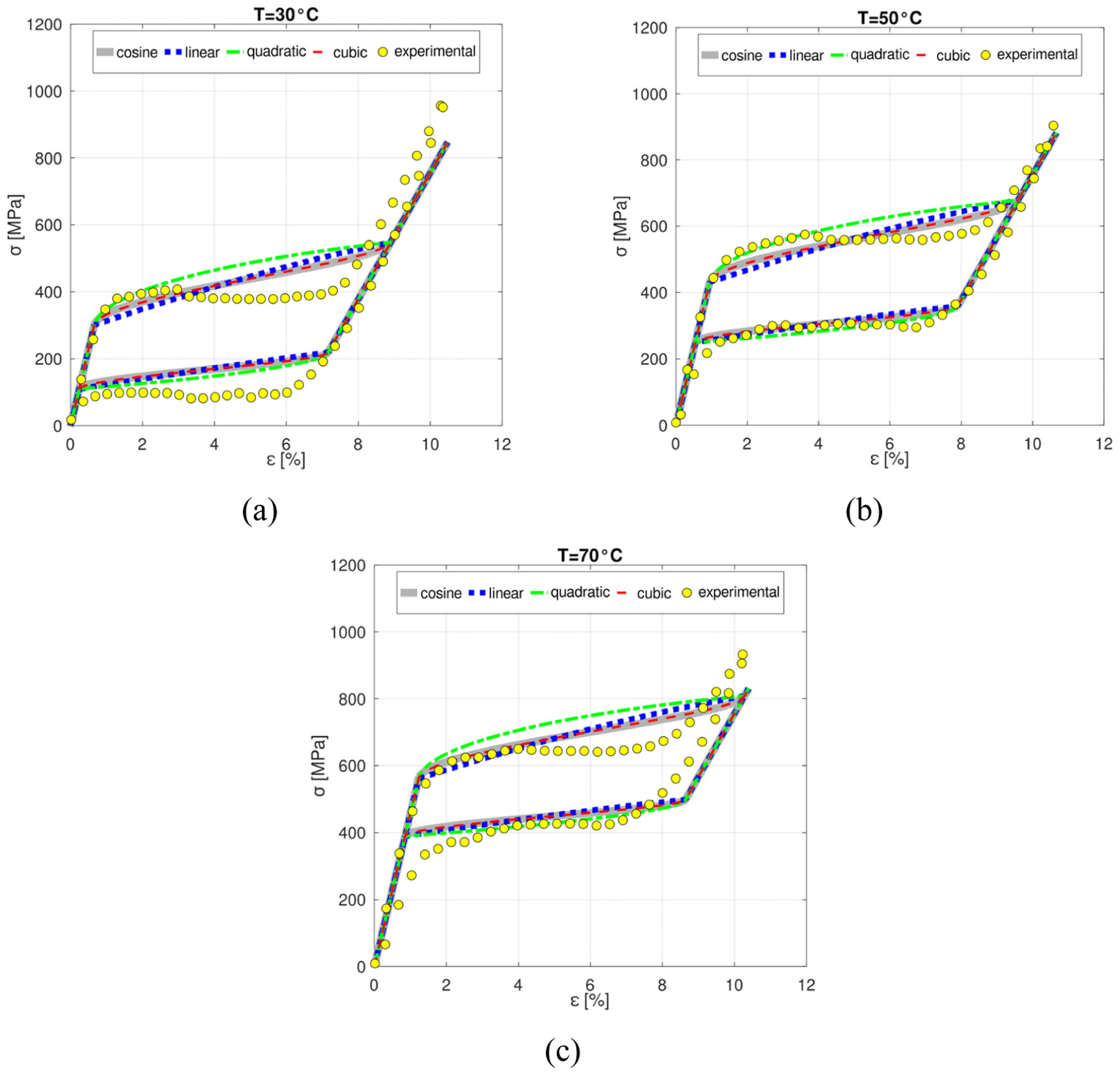
Pseudoelastic strain-driven effect compared with experimental data by Adeodato et al. (2022): (a)
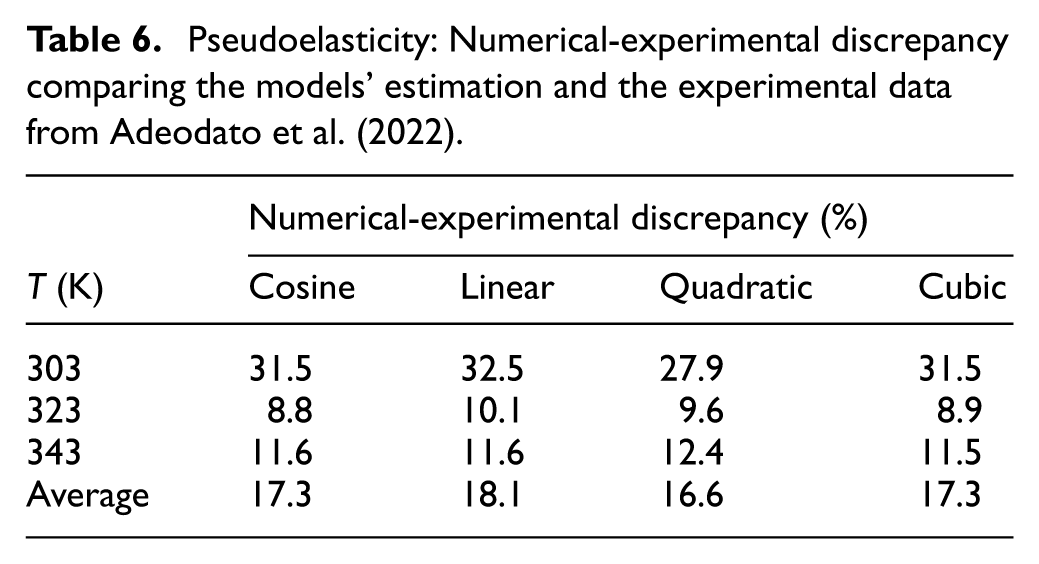
For a quantitative comparison, the numerical-experimental discrepancy is presented in Table 6. Comparing the discrepancy, the quadratic, the cubic and the cosine functions obtained the best estimation for one case. Although the linear polynomial model obtained the worst estimation for two cases, a small difference is observed when compared with the best and the worst estimations for all cases. Comparing the experimental data for all the three temperatures, the average errors are: 17.3% for the cosine, 18.1% for the linear, 16.6% for the quadratic, and 17.3% for the cubic. This result indicates that the models have very close estimations, the difference between the worst (linear) and the best (quadratic) for these data is only 1.5%. Another point that should be evaluated is the computational cost. The linear polynomial model is approximately 87% faster than the other functions due to the analytical solution, while all the other functions demand iterative solutions.
Pseudoelasticity: Numerical-experimental discrepancy comparing the models’ estimation and the experimental data from Adeodato et al. (2022).
Shape memory effect
Shape memory effect is now of concern considering two different phenomena: one-way shape memory effect (SME) using experimental data by Adeodato et al. (2022) as reference; two-way shape memory effect (TWSME) using experimental data by Luo and Abel (2007) as reference.
Initially, the SME is of concern, and constitutive parameters presented in Table 5 are used. Typically, a mechanical loading is applied at a temperature lower than
Shape memory effect load cycle for the SME based on Adeodato et al. (2022): (a) stress and (b) temperature.
It should be pointed out that the experimental data deal only with the martensite reorientation during the mechanical loading-unloading process, and therefore, do not consider the subsequent thermal load responsible for the shape recovery. Nevertheless, the temperature variation is simulated to demonstrate the model ability to represent the shape recovery represented by the transformation from detwinned martensite to austenite when
Shape memory effect: (a) martensitic reorientation induced by the mechanical load establishing a comparison with the experimental data from Adeodato et al. (2022) and (b) shape recovery induced by the thermal load.
Two-way shape memory effect (TWSME) is now of concern. Experimental tests due to Luo and Abel (2007) are used as reference. The original reference presented just the temperatures for start and finish of phase transformation, being measured before the samples training. Table 7 are employed as material properties including adjusted values and other taken from Hartl et al. (2010a).
Material properties for the TWSME based on the data reported by Luo and Abel (2007).
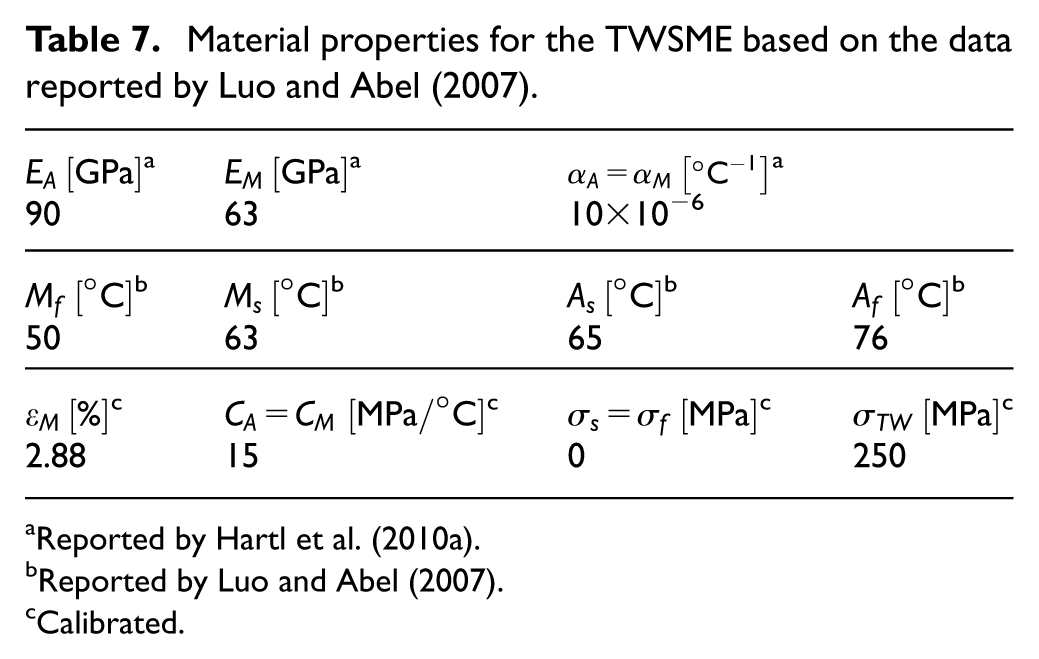
Reported by Hartl et al. (2010a).
Reported by Luo and Abel (2007).
Calibrated.
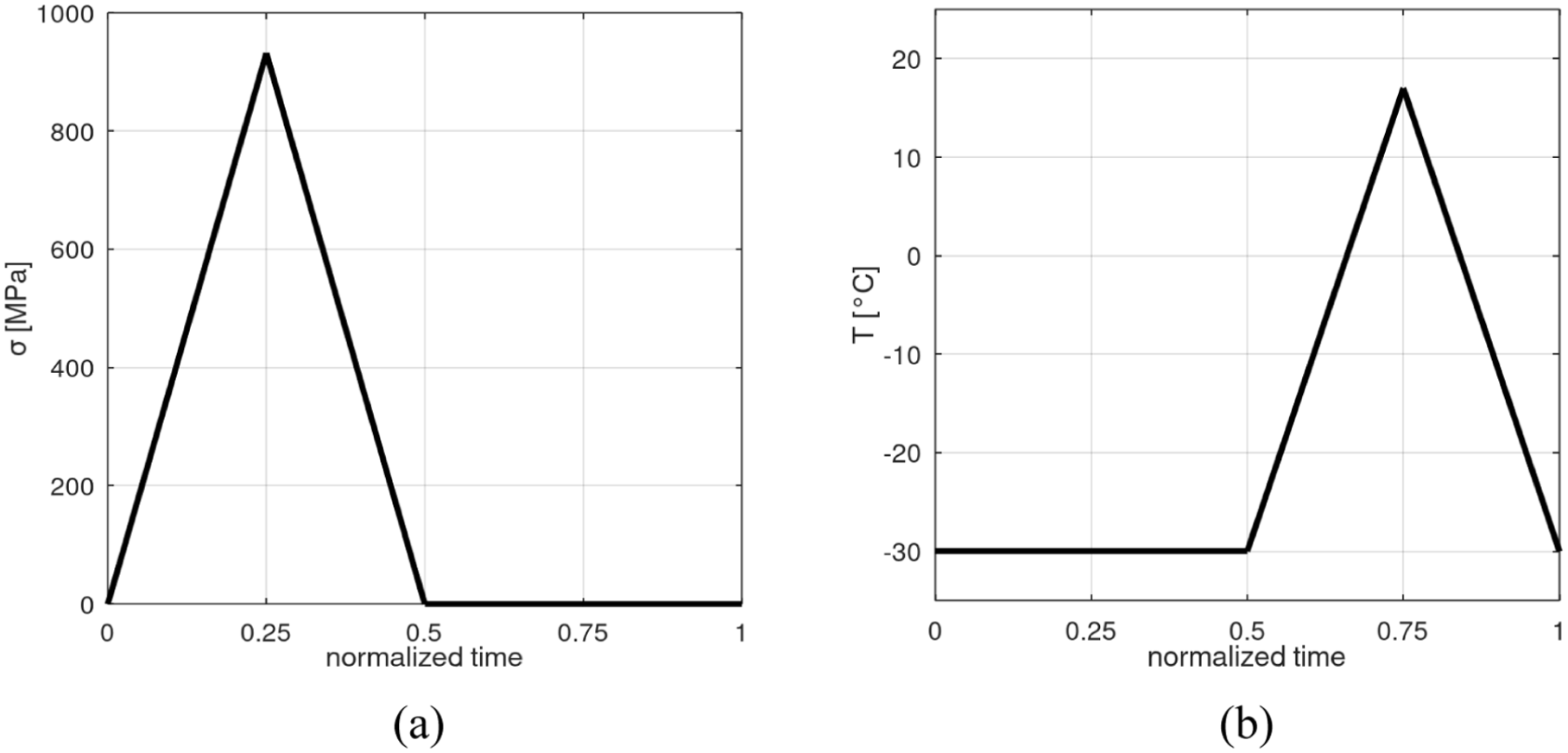
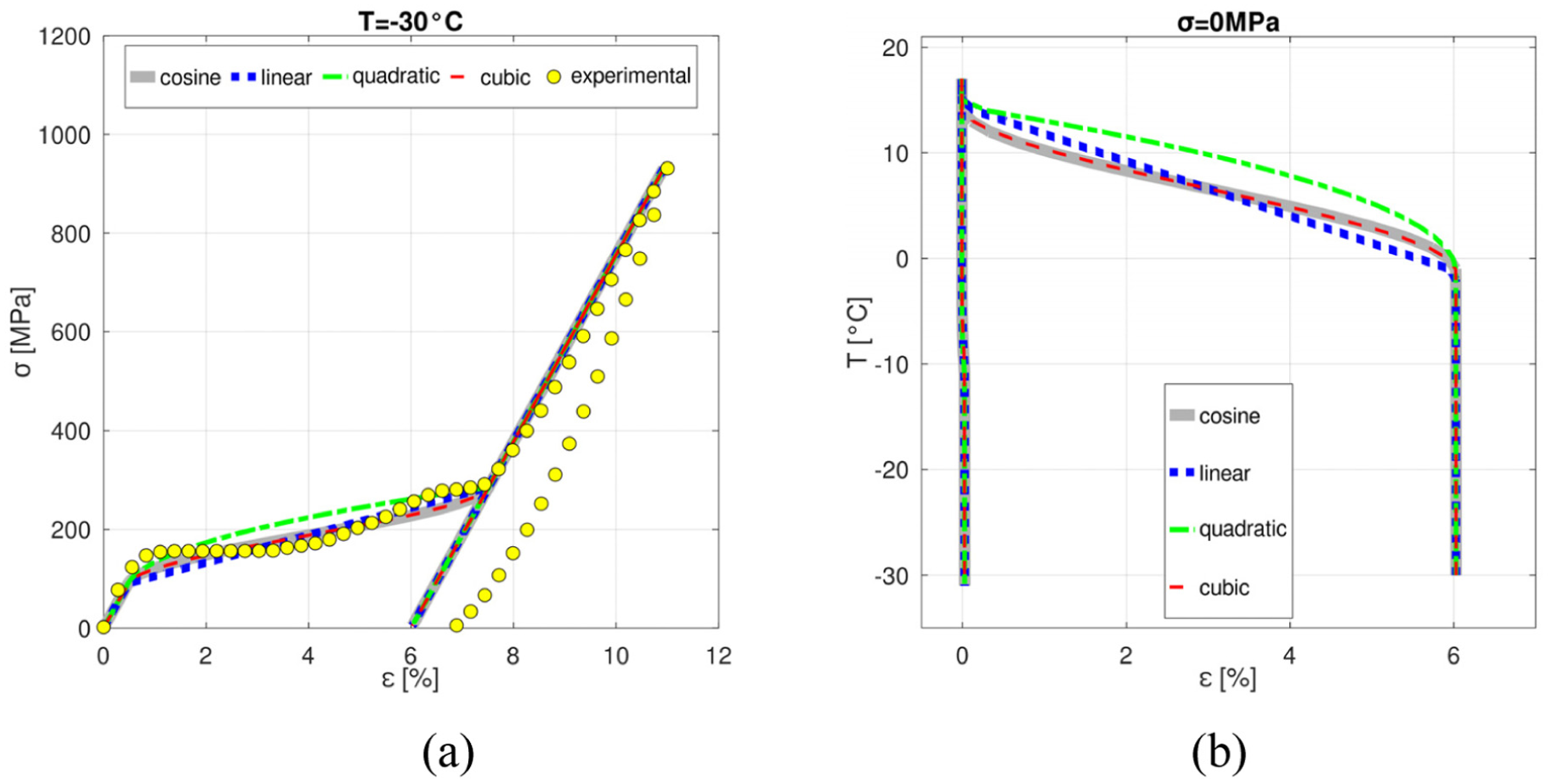
TWSME is treated as a temperature-driven case, shown in Figure 14. Figure 15 presents numerical simulations as strain-temperature curves. It is noticeable that shape changes occur due to temperature variations, without mechanical loads. This behavior is the essence of the TWSME, different of the SME that needs a mechanical load to induce shape change. This effect is only possible due to a previous training process that induces a residual stress field, represented by
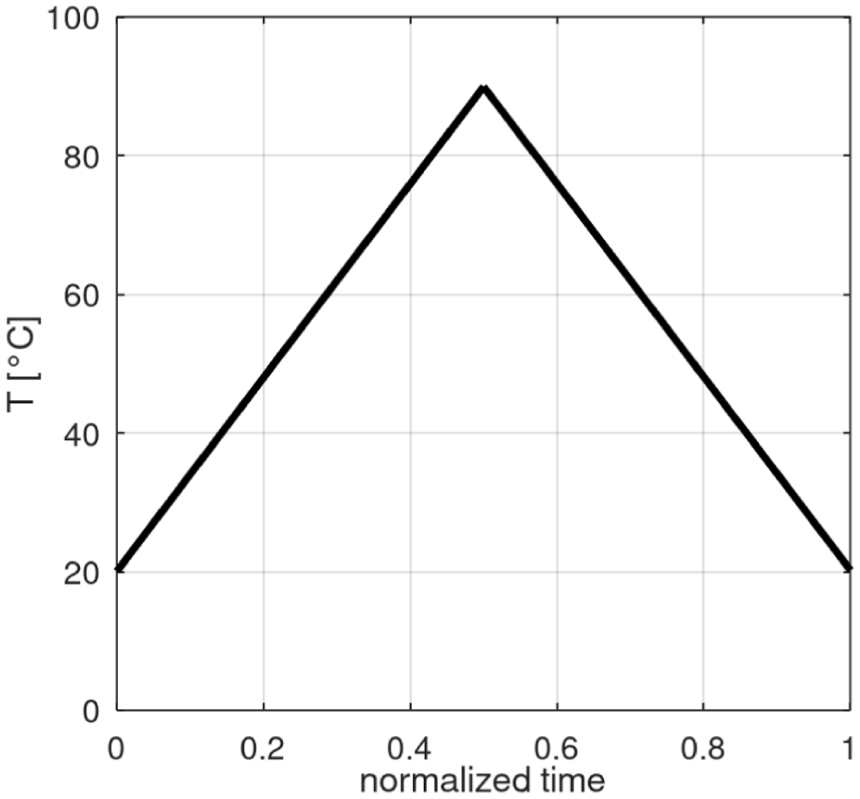
Temperature-driven for the two-way shape memory effect from Luo and Abel (2007).
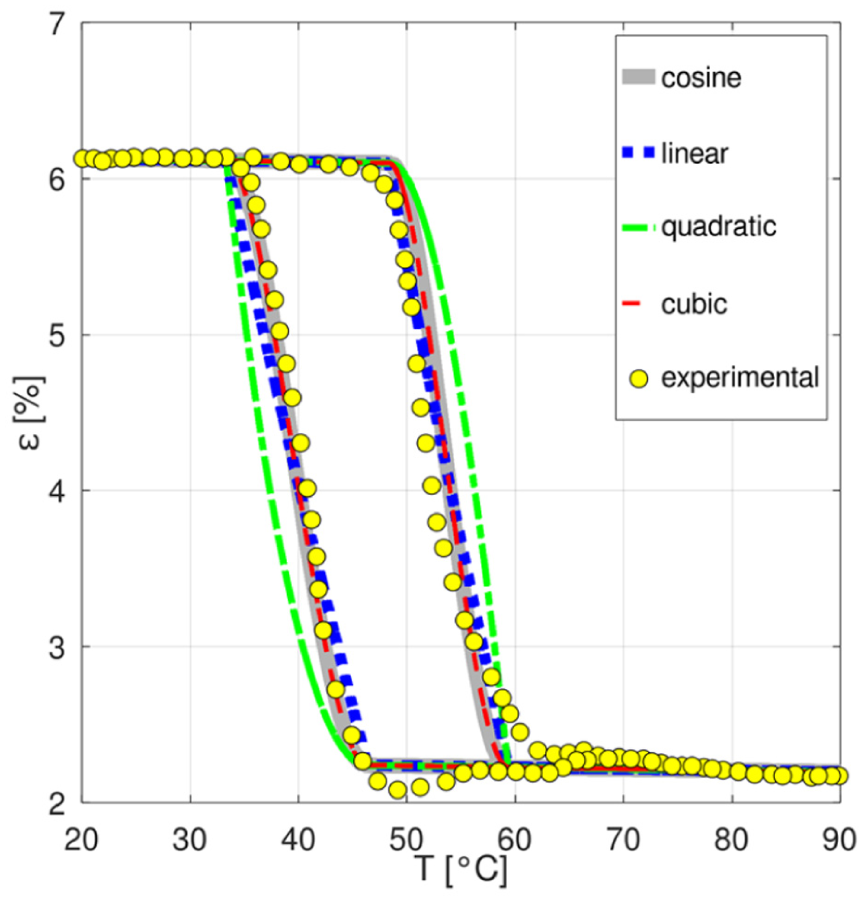
Two-way shape memory effect compared with experimental data from Luo and Abel (2007).
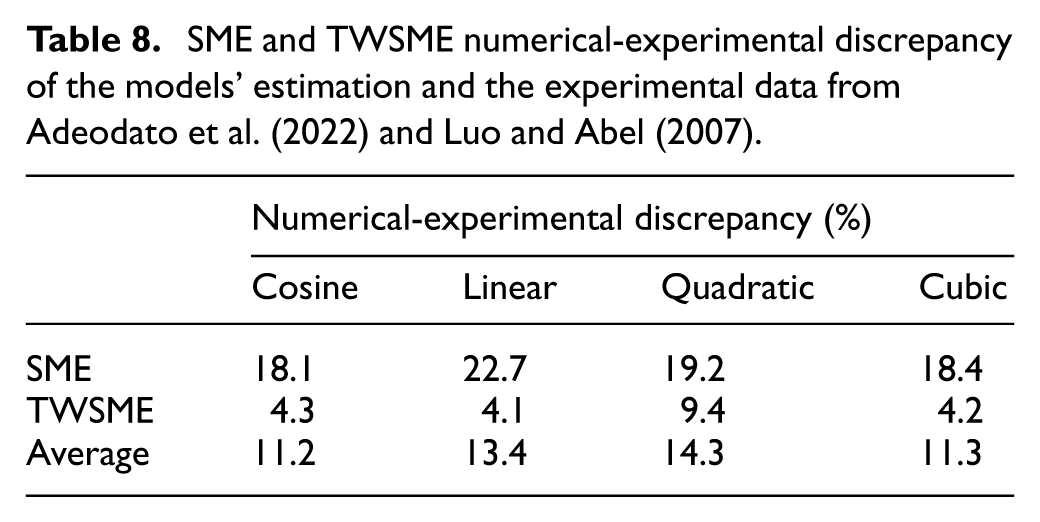
Results of the numerical-experimental discrepancy are presented in Table 8. The linear function obtained the highest value for the SME and the smallest for the TWSME. Considering both one-way and two-way, the average discrepancies are: 11.2% for the cosine, 13.4% for the linear, 14.3% for the quadratic, and 11.3% for the cubic. Now, the difference between the model with the best estimations (cosine) and the model with the worst estimation (quadratic) is 2.3%.
SME and TWSME numerical-experimental discrepancy of the models’ estimation and the experimental data from Adeodato et al. (2022) and Luo and Abel (2007).
Internal subloops
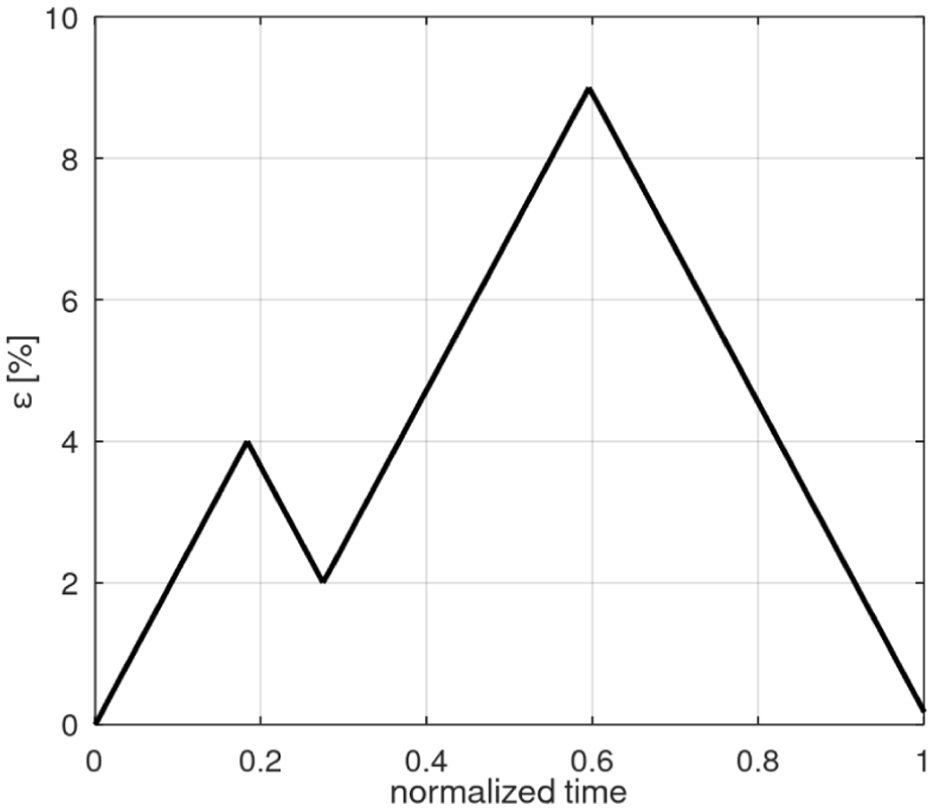
This section investigates internal subloops associated with incomplete phase transformations. Experimental data considering material properties characterized in Section 3 and presented in Table 2 are employed, being based on tests reported by Alvares et al. (2024). Different strain-driven load cycles are of concern in order to show different aspects of complex SMA thermomechanical responses. All tests are performed at a constant temperature
Figure 16 considers a mechanical loading process, named load I. The stress-strain curves of this response are presented in Figure 17 showing internal subloops due to incomplete phase transformation. It is noticeable that the constitutive models present good agreement with experimental data.
Strain-driven load I based on experimental tests by Alvares et al. (2024).
Pseudoelastic internal subloops based on experimental tests by Alvares et al. (2024), load I.
A different strain-driven load (load II) is now of concern, being presented in Figure 18. Figure 19 presents the stress-strain curves showing again internal subloops. Once again, all models present a good agreement.
Strain-driven load II based on experimental tests by Alvares et al. (2024).
Pseudoelastic internal subloops based on experimental tests by Alvares et al. (2024), load II.
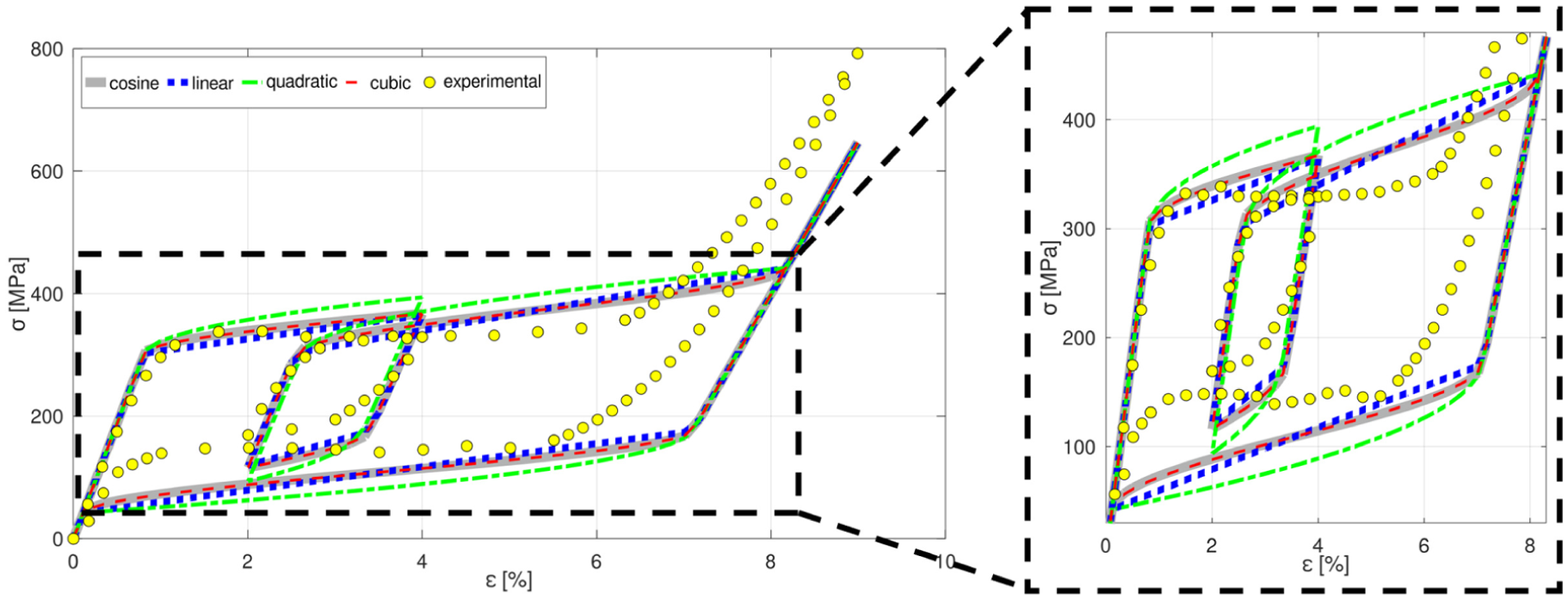
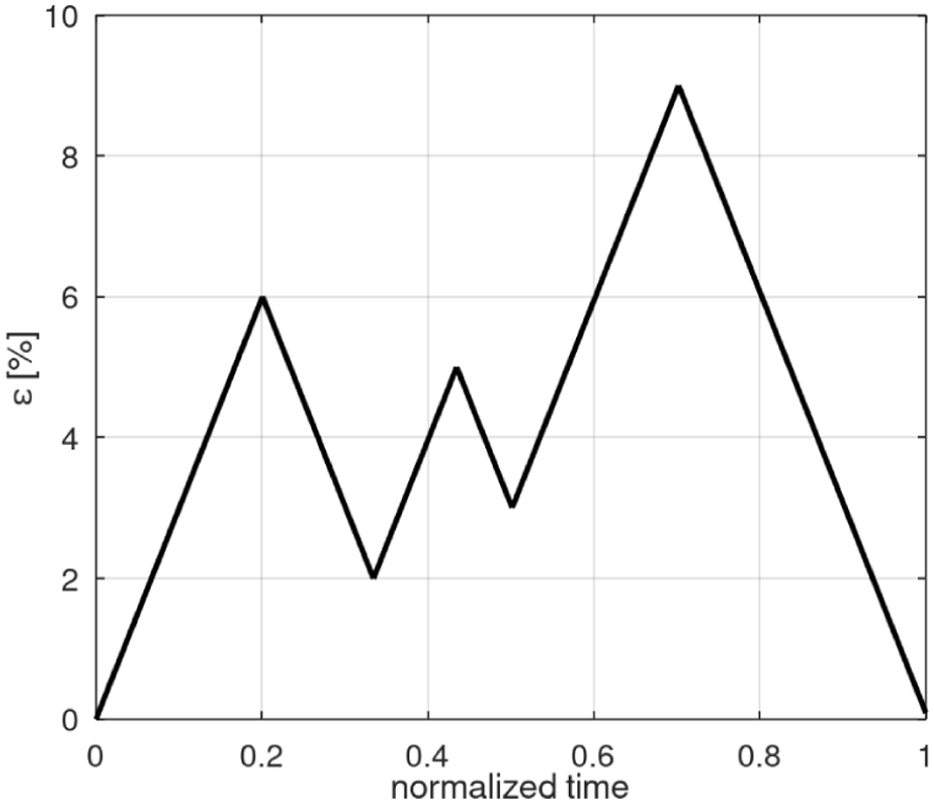
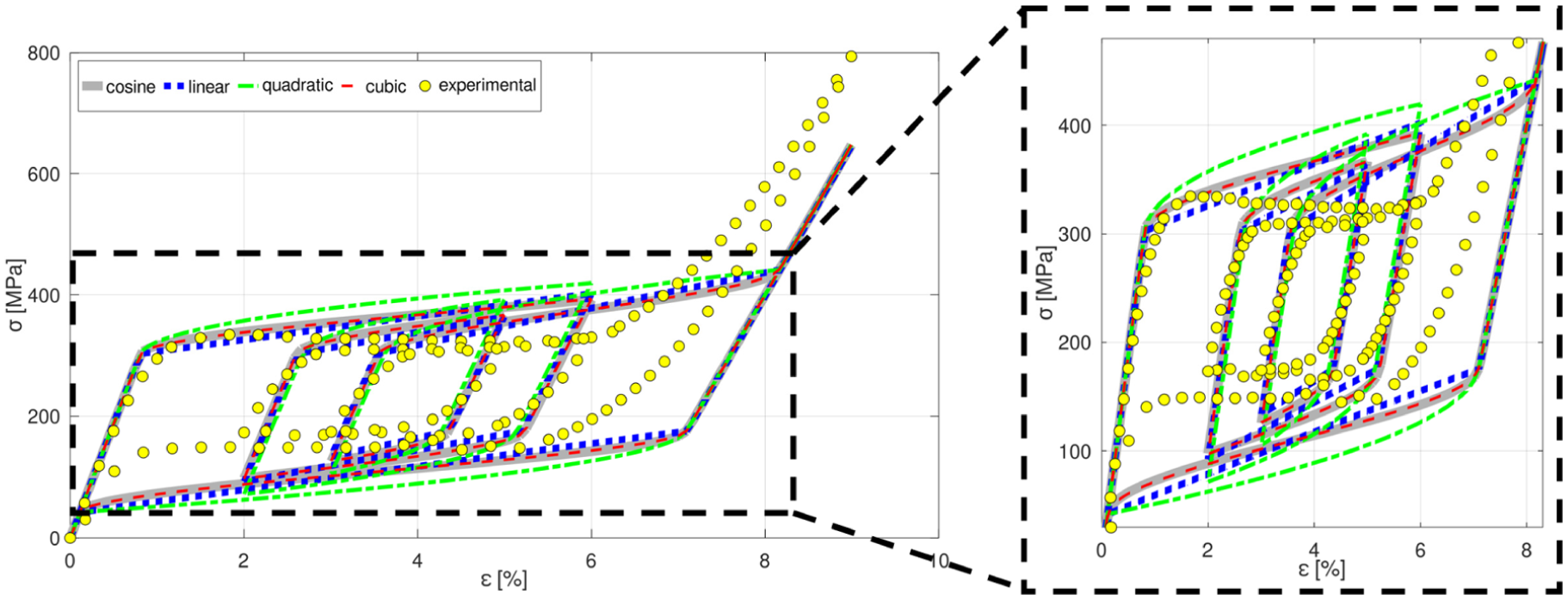
Finally, a different strain-driven load is employed (load III), being presented in Figure 20, while the stress-strain response shown in Figure 21, that depicts details about different cycles. Although all models present a reasonable agreement, it is noticeable that the cosine and cubic functions are overlapped, while the quadratic function has the most discrepant trend.
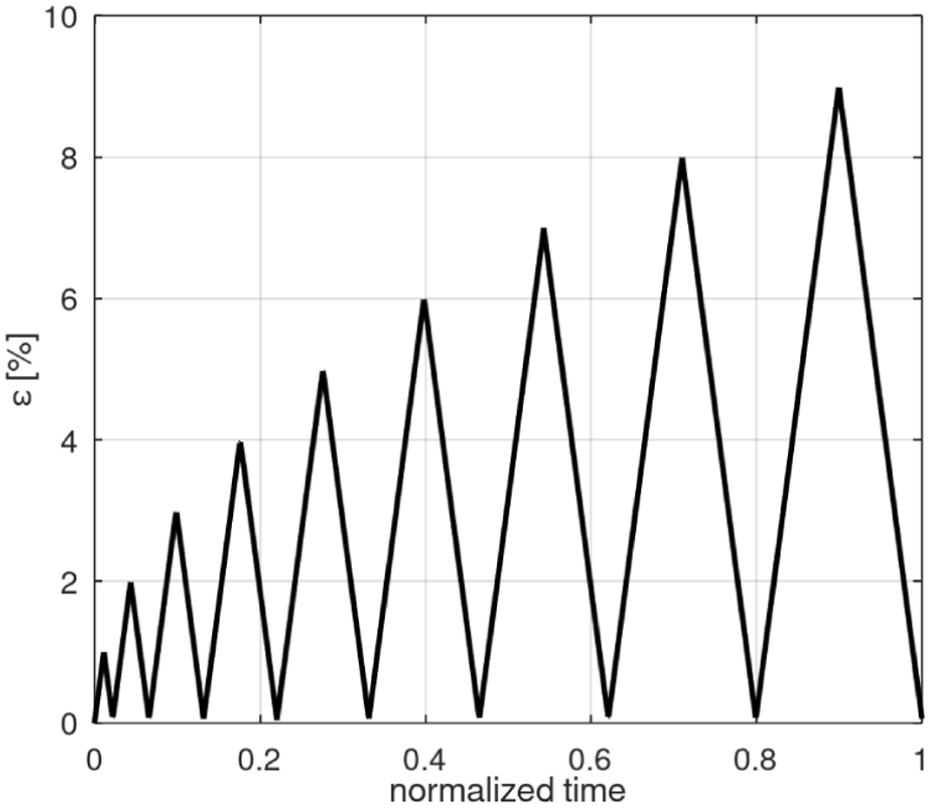
Strain-driven load III based on experimental tests by Alvares et al. (2024).
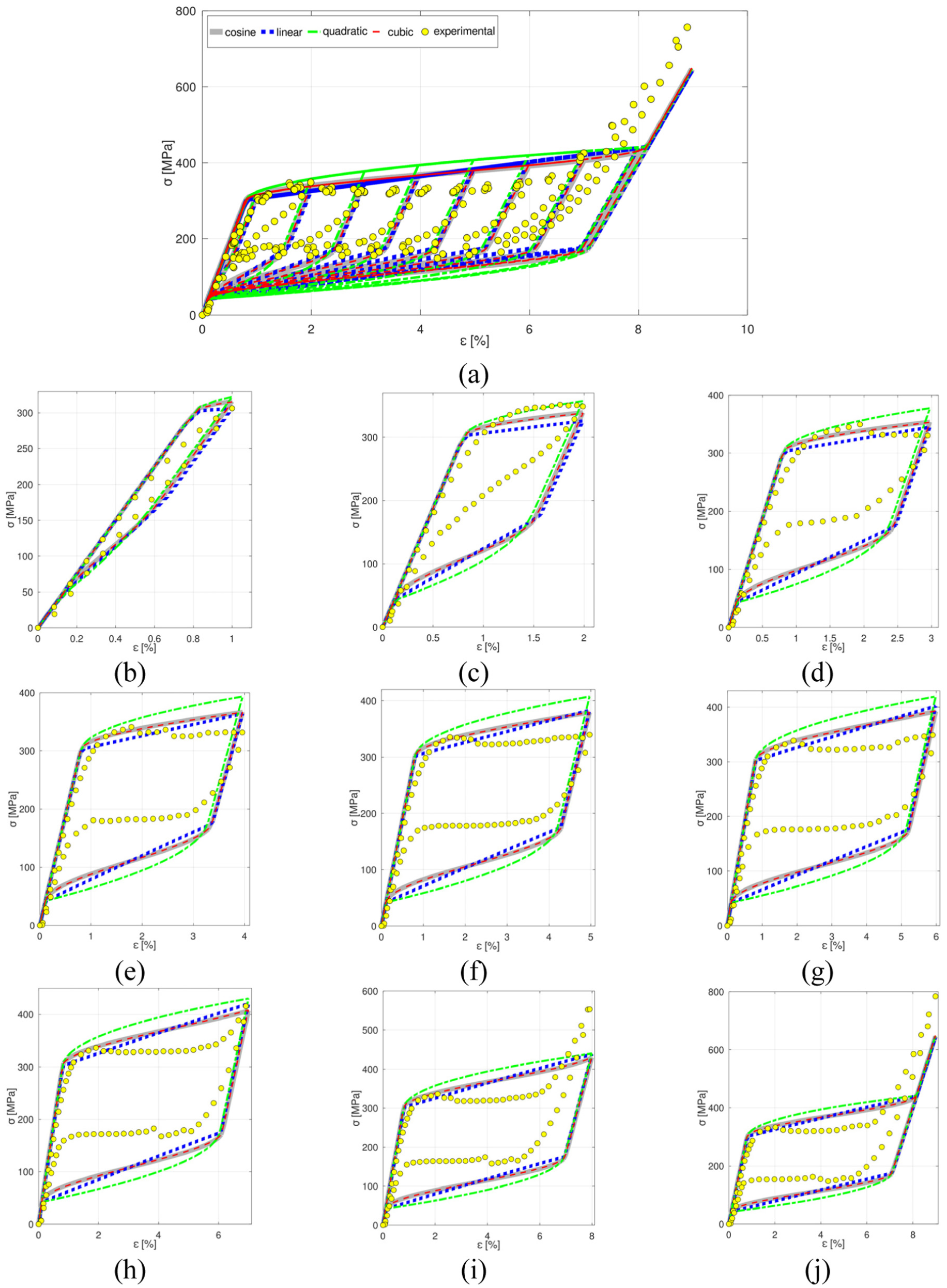
Pseudoelastic internal subloops based on experimental tests by Alvares et al. (2024), load III: (a) complete load history; (b)
The computational efficiency of the linear function also must be highlighted when compared with the other functions which the analytical solutions are not available. In general, linear polynomial simulations are 86% faster than the others since it does not need the iterative process.
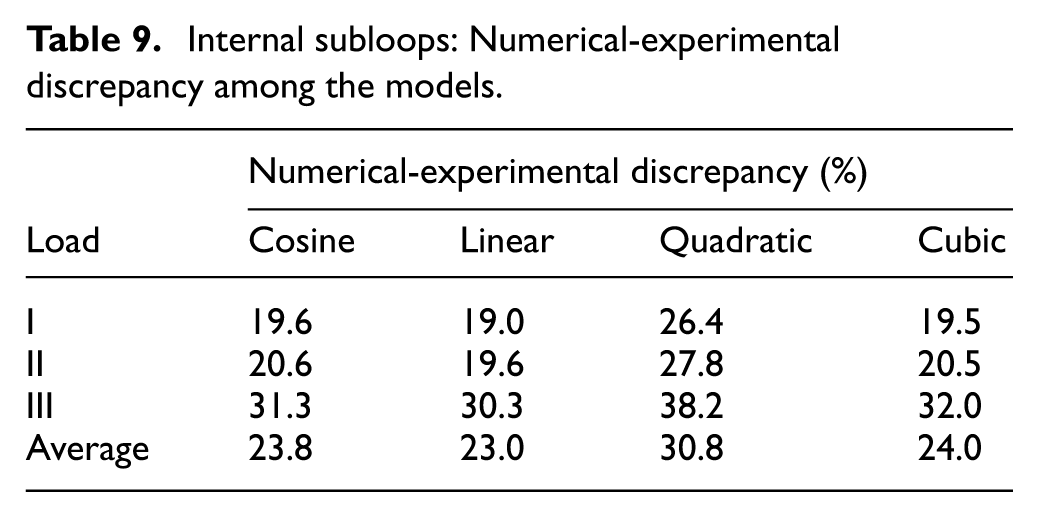
The quantitative numerical-experimental discrepancies are listed in Table 9. It should be noted that the linear function has the best estimation for all the load cases, with results compared with the cosine and quadratic functions.
Internal subloops: Numerical-experimental discrepancy among the models.
Conclusions
This paper deals with SMA constitutive model with assumed phase transformation kinetics, investigating the use of polynomial functions. The classical Brinson’s model is employed as the essential framework, but novel ideas are incorporated to deal with tensile-compressive behaviors and two-way shape memory effect.
Polynomial phase transformation kinetics are derived, considering linear, quadratic, and cubic functions. Numerical procedure has a direct implementation for stress-driven and temperature-driven cases. The strain-driven case needs an iterative procedure, but analytical solutions can be derived for the linear polynomials, which is an attractive advantage since it results in a considerably less computational cost.
Numerical simulations are carried out to show the model ability to deal with the SMA thermomechanical behavior. Essentially, the following cases are treated: temperature-induced phase transformation with constant stress; pseudoelasticity; one-way shape memory effect; two-way shape memory effect; internal subloops due to incomplete phase transformation. Considering all these sets of experimental data, 11 different load scenarios are evaluated. All models present a good match with experimental data, being able to capture the general SMA thermomechanical behavior.
Results highlight that the use of the linear function to describe the phase kinetics transformation is a good alternative, improving the computational efficiency without loss the capability to describe the complex behavior of SMAs. In general, linear polynomial simulations are 86% faster than the others since it does not need the iterative process.
Footnotes
Appendix 1
This appendix aims to derive the closed-form analytical expressions for strain-driven loads using linear polynomial phase transformation model, as presented in Section 4. By considering the pseudoelastic phenomenon,
Since
The strain-driven case assumes
Using equations (8) and (22), the martensite volume fraction for the austenite-martensite transformation is
Replacing equation (A.3) into equation (A.2)
Realizing that equation (A.4) is a quadratic polynomial function of
where
Consequently, the solutions of equation (A.5) are
The solution of
On the other hand, the volume fraction for the martensite-austenite transformation is calculated by manipulating equations (10) and (24), obtained the following relation
Replacing equation (A.10) into equation (A.2)
The compact form of the quadratic expressions defined in equation (A.11) is
where
At last, the solutions of equation (A.12) are written as
The two solutions from equation (A.16) should be evaluated considering that
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to acknowledge the support of the Brazilian Research Agencies CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico), CAPES (Coordenação de Aperfeiçoamento de Pessoal de Nível Superior), and FAPERJ (Fundação Carlos Chagas Filho de Amparo à Pesquisa do Estado do Rio de Janeiro) and through the INCT-EIE (National Institute of Science and Technology - Smart Structures in Engineering), and FAPEMIG (Fundação de Amparo à Pesquisa do Estado de Minas Gerais). The support of the AFOSR (Air Force Office of Scientific Research) (FA9550-23-4301-0527) is also acknowledged.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The datasets generated during and/or analyzed during the current study are available from the corresponding author upon reasonable request.*