
Abstract
This work investigates the sedimentation behavior of magnetorheological fluids (MRFs) under static and dynamic loading. An analytical approach using the dipole-dipole interaction model is applied to describe the sedimentation behavior of the MRF by calculating the magnetic forces resulting from the particle chains’ shape and examining its stability by defining the stability criterion. The modeling is carried out in two steps. Firstly, the static case is considered. Under static loading conditions, the gravitational force is the factor that determines the chains’ shape. Once the shape of the particle chain is known, the magnetic forces acting on each particle and the resulting force can be calculated. Critical conditions for the chain formation and stability are then defined and calculated, which builds the foundation for extending the model to also include dynamic loading, where centrifugal forces become the decisive stability factor. Analogous to the static case, the critical parameters that trigger the onset of sedimentation and the transition to sedimentation are identified, defined, and calculated. Experimental validation is performed for both static and dynamic conditions.
Keywords
Introduction
Magnetorheological fluids (MRFs) are a type of smart material that changes its rheological properties very rapidly when exposed to an external magnetic field; Zhang et al. (2018) report reaction times between 15 and
Due to their rheological properties, which can be manipulated in real-time, MRFs are adopted in a range of engineering applications. Sohn et al. (2018) summarize several robotics applications, including manipulators, deformable grippers, haptic devices, and climbing robots, by considering two distinct methodologies: the first utilizes valve systems that result in an active control force within a closed-loop system, while the second uses the flow, shear, and squeeze operating modes of MRFs for direct actuation. The valve mode is particularly efficient in the design of dampers, as discussed theoretically by Olabi and Grunwald (2007), who showed how this mode results in a more compact design with no moving parts in the control section. Shock absorbers present another major branch of MRF industrial applications. A high-precision application of this is the work conducted by Kang et al. (2021), which considers both major and minor pressure losses within the valve to improve the model accuracy of an aircraft landing gear system. Other applications extend into the medical field as well; to this end, Kikuchi et al. (2024) developed different types of compact MRF clutches for haptics (H-MRCs) and integrated them into a twin-driven MRF actuator (TD-MRA) to provide precise force feedback for tele operative surgical systems.
However, one major limitation for broader application is their tendency to settle under gravitational or other external forces over time due to the density difference between the CIPs and the carrier liquid, as shown by de Vicente et al. (2011) and Ashtiani et al. (2015). This process, known as sedimentation, drastically affects their performance and the long-term stability of MR fluid-based systems.
To date, several experimental methods have been developed to characterize the sedimentation process of MRFs; however, no international standard method that precisely defines the test conditions and the results evaluation has been established. While the simplest measurement method includes a visual inspection of the sedimentation ratio (Choi, 2021), more sophisticated techniques, such as inductance-based monitoring using sensing coils (Xie et al. 2015), magnetic detection via Hall probes (Luigjes et al., 2012), X-ray transmission profiling (van Silfhout and Erné, 2019), thermal conductivity correlation (Cheng et al., 2016), or even capacitive measurement systems (Xie et al., 2023), have also been implemented.
Analytical modeling of sedimentation on the other hand remains a significant challenge due to the transition from standard gravitational settling to a complex regime of hindered settling. In the off-state (no magnetic field), the sedimentation process can be approximated using Stokes’ Law and its various modifications to account for particle-particle interactions in dense suspensions. However, when an external magnetic field is applied, inter-particle magnetic forces and field–particle interactions create chain-like microstructures, that increase the mechanical resistance against settling, hence reducing sedimentation rates. While advanced macroscopic and microscopic continuum models effectively characterize MRF properties such as static shear stress and normal pressure as shown by Potisk et al. (2019), a dedicated analytical model for on-state sedimentation has yet to be established. As a result, researchers and engineers rely on empirical parametric models and analytical fits (curve-fit models) to describe these kinetics.
Furthermore, external dynamics such as rotational forces can accelerate or trigger the sedimentation process due to the internal centrifugal forces acting on individual particles. As demonstrated by Schreiner et al. (2022), these forces can be intentionally used to precisely influence the mass distribution of the MRF. By controlling the magnetic field and thus the transfer of shear stress, targeted control of the sedimentation process is achieved, which is applied in rotor balancing.
The primary objective of this work is to derive an analytical model for predicting the onset of sedimentation under the influence of magnetic and acceleration fields. The study is structured into two main phases.
Static Loading Conditions
Initially, an analytical model is derived to predict CIPs sedimentation under static loading in the presence of a magnetic field. For this purpose, the acting forces are first described at particle level. Based on these, a critical equilibrium state can be determined at which the inertial forces outweigh the magnetically induced forces, and sedimentation of the particles begins. This derivation yields an analytical result for the critical magnetic flux density
Dynamical Loading and Continuum Transition
Building upon the static threshold and established boundary conditions, rotational forces are superimposed. This stage presents a significant computational challenge: assuming spherical carbonyl iron particle with a radius of
Several distinct modeling frameworks are developed, to describe the behavior of MRFs ranging from macroscopic continuum theories to complex numerical simulations. Continuum rheological models, such as the Bingham plastic and Herschel-Bulkley models, are frequently used to characterize the fluid’s non-Newtonian transition and field-dependent yield stress as reported by Utami et al. (2018). Hydrodynamic (Elsaady et al., 2020) and energy-based models (Yeh and Chen, 1997) further refine this by coupling Navier-Stokes equations with magnetic field theory or by minimizing system potential energy to predict stable particle configurations. The methodology implemented in this work is based on the dipole-dipole interaction model, which describes the particle interactions and defines them in terms of magnetic forces when a magnetic field is applied (Boyer, 1988; Durney and Johnson, 1969; Seleznyova et al., 2016). As already mentioned, one of the key parameters in determining the resulting magnetic force is the configuration of the particle chain. Therefore, the foundation of the calculation is deriving of the geometry of the chain, based on the system design and its physical boundary conditions. In both phases, typical continuum mechanics models are used, whereby the equation(s) of motion are formulated and solved to obtain the form of the chain. Given the form, the resulting magnetic forces are calculated by initially determining a suitable coordinate system and the position vector for each particle. Through the equilibrium formulation, the critical parameters that is, specific to the system and its loading conditions, are identified and calculated. Finally, the analytically derived models are validated experimentally.
Theoretical framework for sedimentation stability of particle chains
The system analyzed in this work consists of a chamber filled with MRF as described by Schreiner and Maas (2024). The chamber can rotate around a fixed axis using a rotor and is, therefore, subjected to both gravitational and centrifugal forces acting on the particle chains. Furthermore, by utilizing permanent magnets, a homogeneous magnetic field, parallel to the axis of rotation, is applied throughout the entire chamber. The gravitational, centrifugal, and magnetic forces superimpose in this system, thereby determining the behavior of the particle chains inside the chamber. A simplified schematic of a single particle chain and the system is shown in Figure 1.
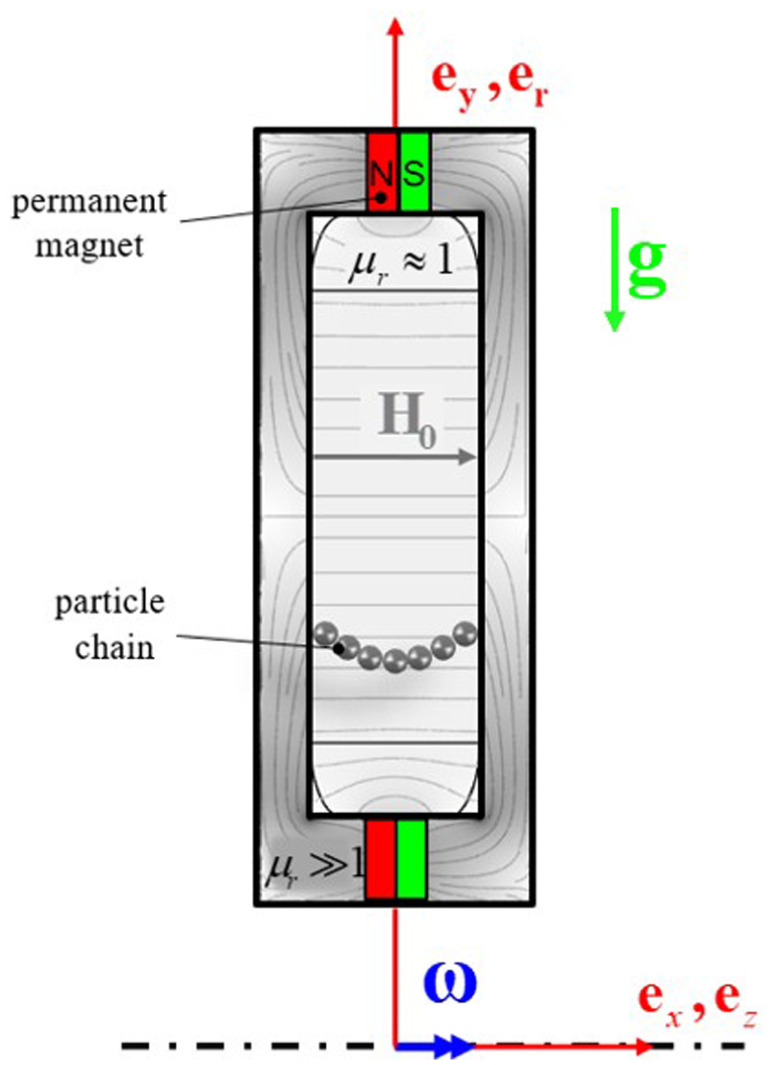
Simplified illustration of the system showing the chamber setup and single particle chain.
Preliminary considerations and assumptions for modeling particle chain dynamics
Based on the classical dipole–dipole interaction model used in the modeling of magnetorheological and ferrofluid particle chains, the following assumptions are adopted:
(i) The particles are uniform, spherical, and composed of the same material (Rosensweig, 1985).
(ii) As per the numerical results, the magnetic field is considered quasi-static and homogeneous.
(iii) Dipolar particles align into single chains and the distance between chains is sufficiently large - hence, the interactions between chains are negligible (Martin and Anderson, 1996; Güth and Maas, 2016).
(v) The particles within each chain are uniformly distributed (Martin and Anderson, 1996).
While real-world MRFs exhibit polydispersity and complex secondary structures, the single-chain dipole-dipole model provides a robust analytical framework to isolate the fundamental interplay between magnetic restoration and displacement forces. Although the dipole approximation is theoretically most accurate for dilute suspensions, where inter-chain interactions are quite small, the framework is extended via a continuum transition to describe actual multi-chain MRF systems. Experimental validation demonstrates that this modeling approach provides reliable quantitative predictions for MRFs with particle volume fractions of up to
Finally, it is assumed that drag forces do not influence the formulated critical parameters, as the model specifically considers the onset of sedimentation where relative velocity is negligible. Similarly, the effect of buoyancy is implicitly accounted for within the effective gravitational force and thus does not appear as an independent dynamic factor in the stability criterion.
Magnetic dipole model and force formulation
The derivation of the magnetic forces acting on a particle chain is based on previous work employing the classical dipole-dipole interaction model, as derived by Yi et al. (2010), Zhao et al. (2012) and later Güth and Maas (2016).
The magnetic force

where

Here
The magnetic field within the particle is given by

with
Sedimentation stability under static loading conditions
Sedimentation stability under static loading conditions is analyzed within a continuum framework. By approximating the particle chain as a continuous filament subjected to a uniform gravitational load, the equilibrium configuration is obtained. In this continuum limit, the chain adopts the well-known catenary profile of a hanging chain under gravity as calculated by Irvine (1981). An outline of the derivation for the governing equations is provided in Appendix 1.
Once the equilibrium shape of the chain is determined, the magnetic force acting on each particle, as well as the resulting total magnetic force, can be evaluated using equation (1). For the static case considered here, the particle positions are described using fixed Cartesian coordinates in the x–y plane. The position vector between two particles i and j along the chain is therefore defined as
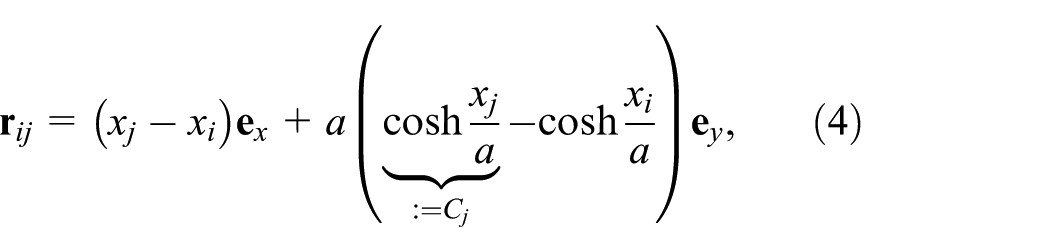
where

Combining equations (1) and (3), the expressions for the magnetic force component in the x-directions can be obtained using the compact notation as follows:


where the constant A represents the physical prefactor:

The geometric auxiliary variables are defined as:
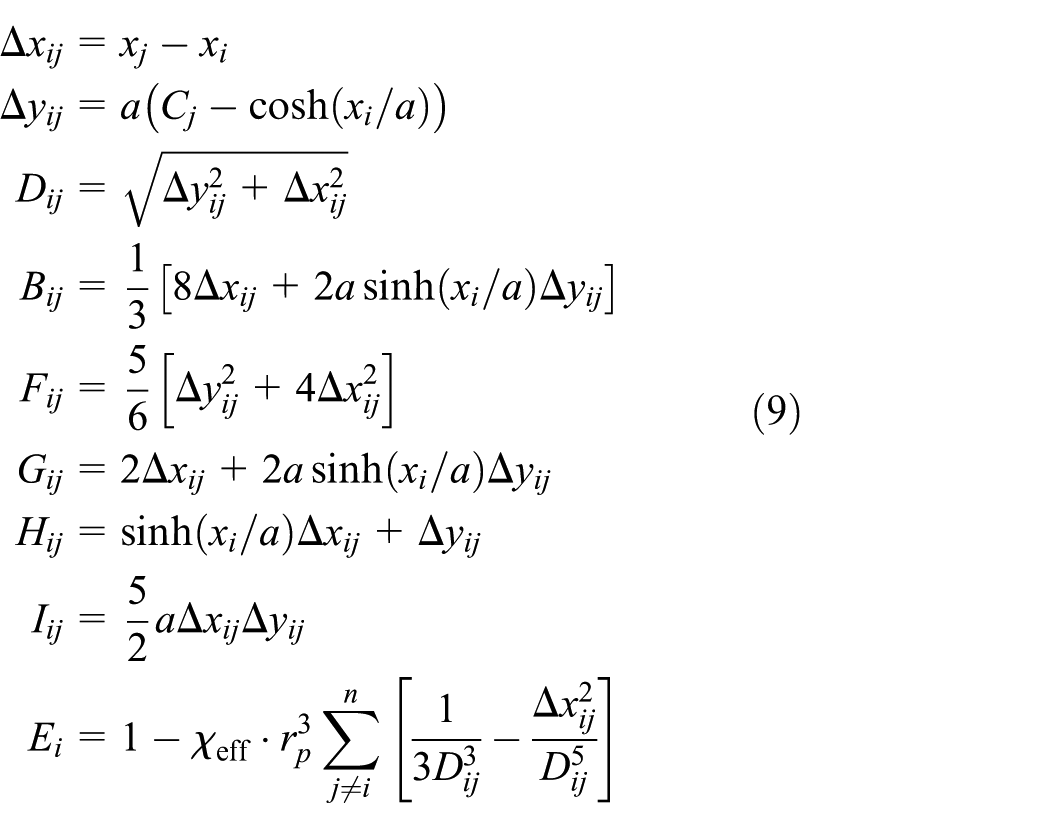
An outline of the calculation is provided in Appendix 2.
There are two theoretically possible modes by which a particle chain can lose its stability in the static case: it can either (1) break at an arbitrary point, most likely at the middle particle, or (2) the particle chain can slide as an unit. At sufficiently high magnetic fields, the particle chain behaves as an effectively rigid body, sustained by the inter-particle magnetic forces. As the external magnetic field decreases, those forces naturally weaken. However, numerical simulations show a significant concentration of magnetic flux density at the particle interfaces (see Figure 11). This localized intensification ensures that the interaction forces remain high enough to prevent individual ruptures. Both COMSOL modeling and the numerical evaluation of the y-component of the magnetic field equation (7), balanced against gravitational forces, confirm this stability. All experiments conducted in the framework of this study align with these findings, showing that the chain does not break at discrete, random particles but rather maintains its shape and slides as a cohesive unit.
Sliding and deformation under diminishing magnetic fields
During the sliding motion, the chain acts as a rigid structure. As a result, both components of the magnetic force remain constant. The sliding of the chain is modeled in this case using Coulomb (1785)’s law of friction, which states that the friction force is proportional to the normal force acting on the structure. Mathematically, this is expressed as:

where

Once the wall force is defined, the equilibrium of the forces for the chain can be formulated using the free body diagram (FBD) for the whole chain shown in Figure 2.

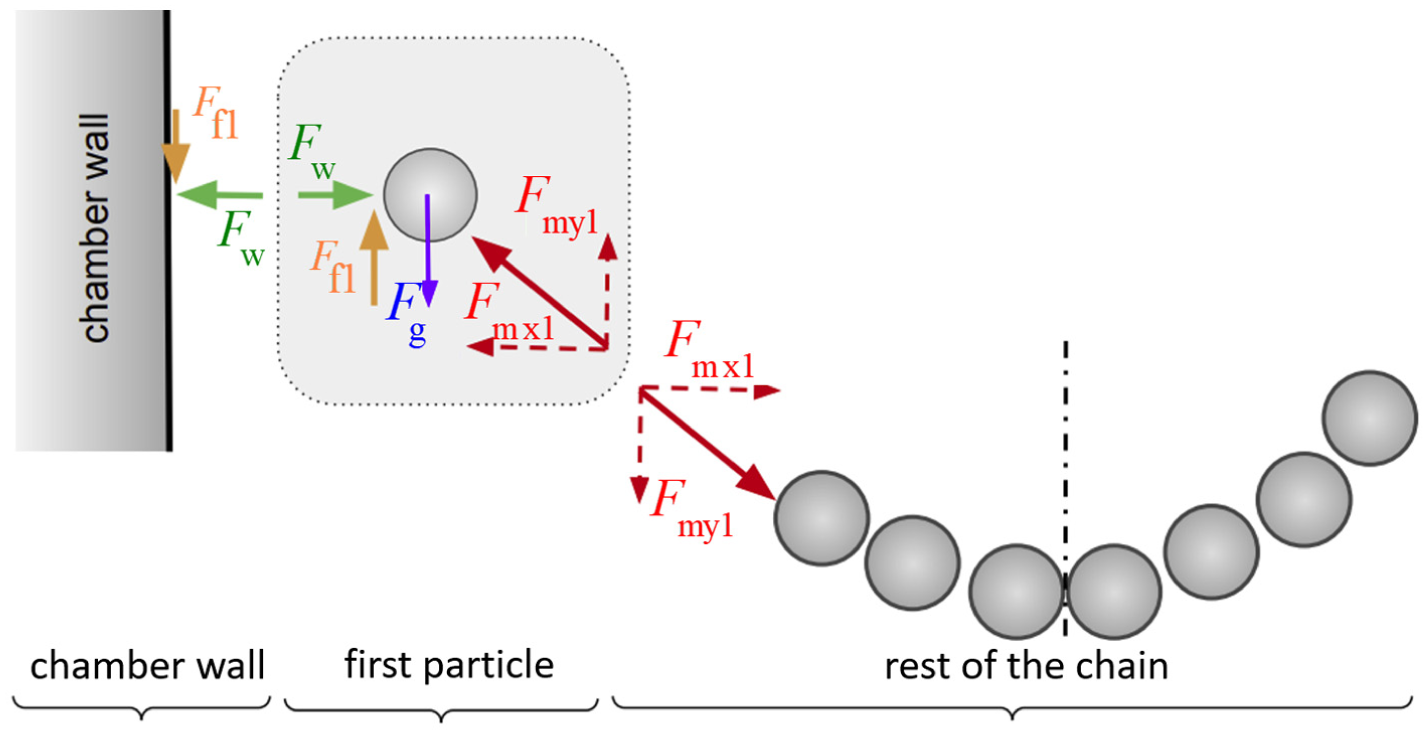
Free body diagram illustrating the interaction of magnetic, centrifugal, and gravitational forces.
Here,

where n is the number of particles per chain,

In the static case, the critical parameter that determines the stability of the particle chain is the applied magnetic field
and the geometric terms
At high chain curvatures, the critical magnetic field strength’s output exhibits bifurcation-like behavior that is identified as a numerical artifact rather than a physical phase transition. This phenomenon originates from the discrete-element formulation of the particle chains and the inherent sensitivity of the dipole-dipole summation to infinitesimal variations in the numerical mesh during significant deformation.
Since, for the experimental evaluation, measuring the magnetic flux density

is used to compute the results for different values of
Figure 3 depicts the results of the calculation for four different particle radii and three different coefficients of friction. The particle radii chosen for the evaluation of the critical magnetic flux density do not directly align with those typically used in MRF applications. This choice was made for an efficient numerical evaluation of equation (15), specifically the various factors influencing the results, such as the coefficient of friction
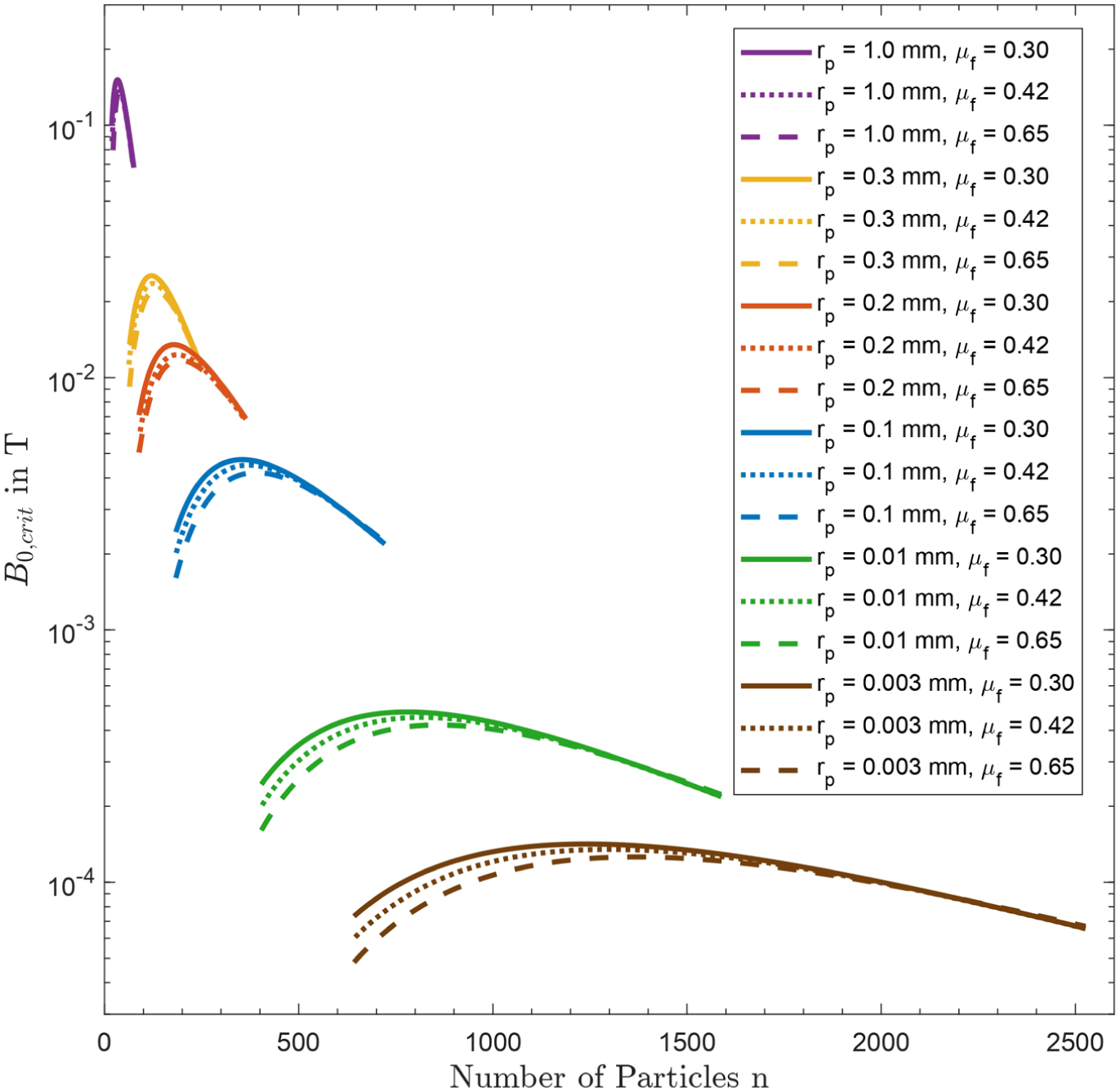
The critical value of the magnetic flux density as a function of the number of particles n, for different particle radii
The influence of the friction force is evident. As expected, lower coefficients of friction
In Figure 4, the results of the numerical calculation of the critical magnetic field as a function of the number of particles are presented, where the focus is placed on the minimum magnetic flux density required for the chain to maintain its structure.
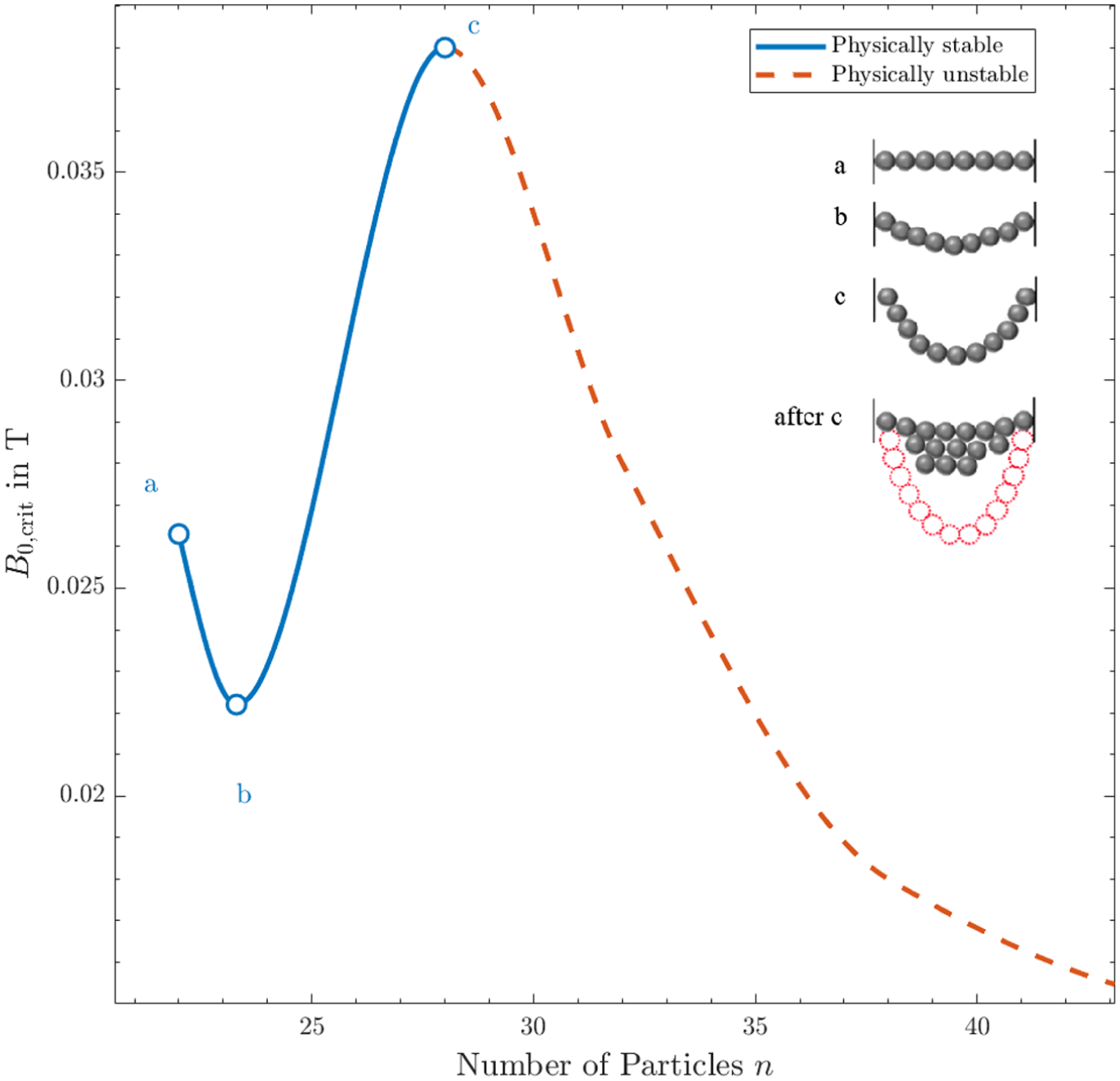
The critical value of the magnetic flux density as a function of the number of particles n, for a particle radius
One of the most significant findings is the clear correlation between the total number of particles and the magnetic field threshold required to keep the chain stable. To put this into perspective, the setup shown in Figure 4 is considered, where
As the number of particles increases further, the critical magnetic field required to maintain the chain’s form rises, reaching a maximum at
It was experimentally observed that chains consisting of a very large number of particles can be forced into a hyperbolic shape artificially. However, once released, the chain collapses, breaking into several shorter chains, which due to the very strong multi-chain interactions cannot be represented by the model used here. The derivation of these critical parameters, including the minimum magnetic flux density required to prevent sedimentation under gravitational forces and the corresponding optimal chain configuration in terms of particle number, is the foundation for the subsequent analysis of the system’s behavior under dynamic loading conditions.
The experimental and numerical validations of equation (15) utilized millimeter-sized particles (
Sedimentation stability under dynamic loading conditions
The shape of the chain is determined using principles of continuum mechanics, analogous to the approach employed in the static case. Initially, the chain of particles is modeled as a continuum, from which an infinitesimally small element is analyzed. This chain is subjected to various forces, including gravitational forces, magnetic interactions, and centrifugal forces arising from the rotational motion of the chamber.
The system studied in the dynamic analysis is illustrated in Figure 5. The chamber is mounted on a rotor, which rotates with the angular velocity ω. Since a rotating system is considered, it is described in polar coordinates. In this coordinate system, the radial direction aligns with the length of the chamber, while the z-direction corresponds to both the width of the chain and the direction of rotation as well as the external magnetic field. The rotation of the chamber results in a centrifugal force that pulls the particle chain away from the axis of rotation. This force is decisive in maintaining the chain’s stability and in the onset of sedimentation.
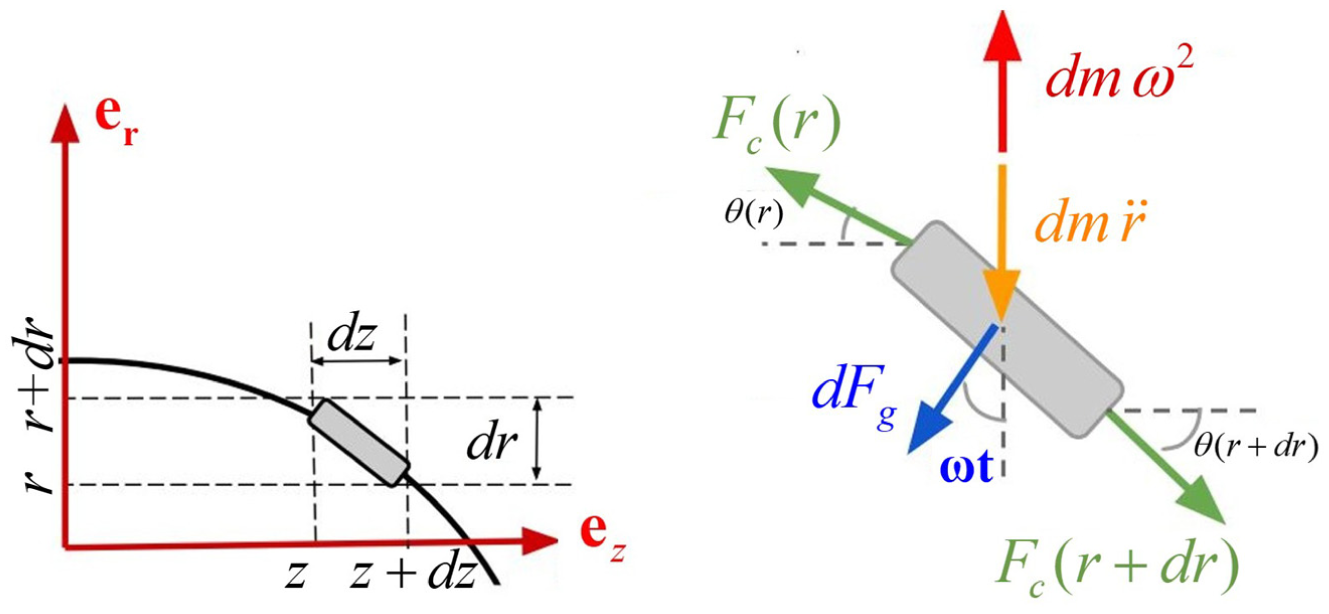
Free body diagram of an infinitesimal element in a rotating system.
Extending the arguments established in the static case, the particle chain resists internal deformation and instead translates as an effectively rigid structure. As a result, damping associated with oscillatory amplitudes is not relevant for the stability analysis. Moreover, the stability criterion is formulated at the onset of sedimentation, that is, when the chain begins to lose equilibrium, rather than during its following dynamic motion.
By applying Newton’s second law of motion in the z-direction, the following relationship can be derived:

where
Finally, the parameters governing the chain deformation are expressed explicitly in terms of physical system properties, such as particle size, material density, gravitational acceleration, and rotational speed. The resulting expressions form the basis for evaluating the magnetic forces acting on the chain and for determining stability criteria under dynamic loading conditions. For clarity and readability, the detailed mathematical derivation is provided in Appendix 3.
After the calculation for the configuration of the chain is complete, the magnetic force on each particle, along with the resulting magnetic force, can be evaluated using equation (1). This involves defining the position vector between two particles i andj as follows:

Here, κ denotes a system-dependent constant associated with the spatial mode of the chain. It incorporates the combined effects of the effective magnetic stiffness

The total magnetic force components in both directions, as formulated in equation (1), are determined by utilizing equation (3) and the position vector, equation (18). he magnetic force components in the radial (r) and axial (z) directions can be respectively obtained in an analogous compact form as follows:


where the constant A remains the same as in the Cartesian formulation:

The interaction term
Unlike the nested sum
The geometric auxiliary variables are:
Appendix 4 provides the outline of the calculation. Under dynamic loading conditions, the primary force influencing stability is the centrifugal force, making the angular velocity ω the defining parameter for the stability criterion. This critical angular velocity can be calculated by formulating the equilibrium of forces for a single particle chain.
From the equilibrium of forces, shown in Figure 6, it follows:

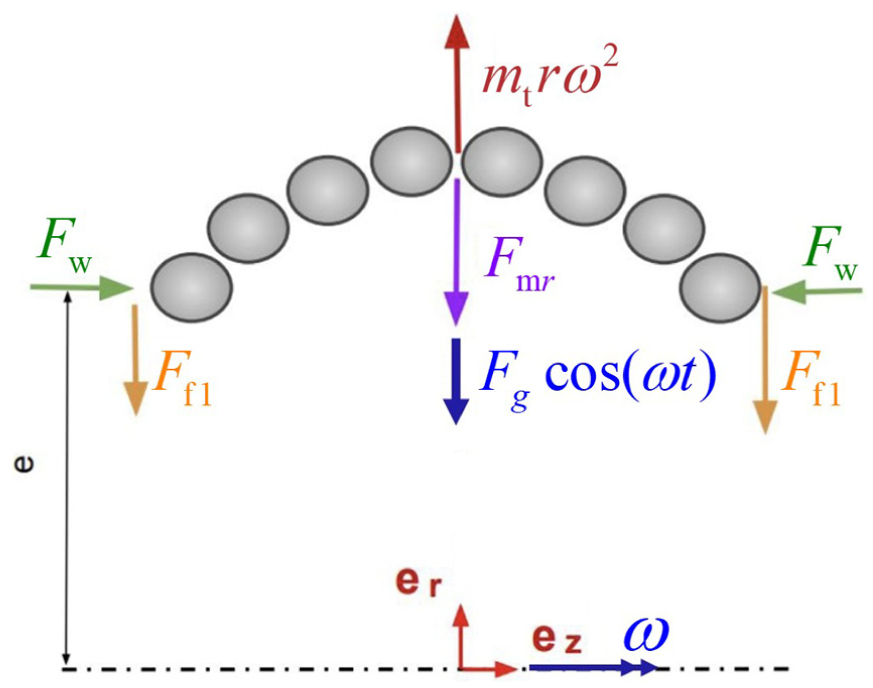
Free body diagram of the particle chain under dynamic loading conditions, where
The notations used are analogous to the previous calculation, for the static case. The calculation of the friction force is also done using Coulomb’s law of friction equation (10), where the normal contact force depends on the particle-wall interaction and therefore on the tangential component of the magnetic force (equilibrium of forces in the z-direction). Due to symmetry, the friction forces are equal.

The dynamical parabolic chain loses its stability and starts sliding as soon as:

This formulation represents the dynamic force balance at the onset of instability, where the magnetic restoration and frictional forces are exactly counterbalanced by the centrifugal load in the rotating frame. The derived formula is evaluated for different values of the friction coefficient
The graph in Figure 7 illustrates the dependence of the angular velocity ω, on the magnetic flux density for these varying parameters. As expected, an increase in
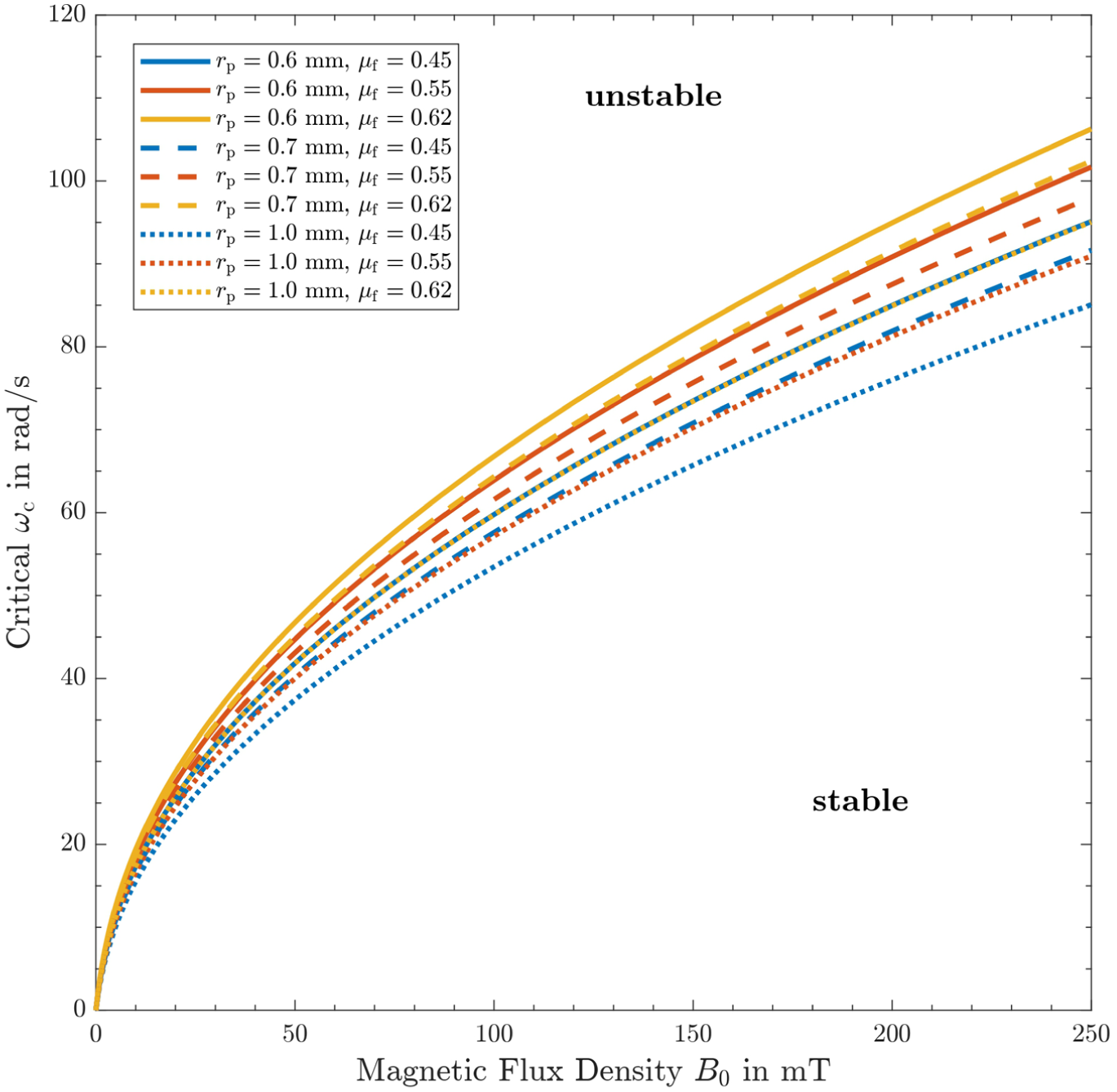
ω as a function of
The region below each curve represents the stable regime of the magnetic chain, where the centrifugal force is insufficient to induce particle chain sliding. As long as the critical angular velocity,
Continuum approach using shear stress
While the previous analysis employed a discrete-particle model, in which the equilibrium between centrifugal and magnetic forces determines the stability of particle chains, practical MRFs contain several micrometer carbonyl iron particle chains. To address this, a continuum-based description is employed, in which the suspension is characterized by macroscopic parameters such as the shear stress, τ. The transition from discrete dipole interactions to a continuum shear-stress model is achieved by extrapolating the magnetic restoring force of a single particle chain using the theoretical number of chains per unit area (
Estimating the shear stress requires determining the number of particle chains per unit area. This can be approximated based on the particle volume fraction,

where t denotes the particle coating thickness, and δ the thickness of the carrier fluid layer between adjacent particles. For uncoated particles, as considered in the present study, the coating thickness is set to
Using an analogous approach to that presented in equation (27), all previously derived forces are reformulated on a per-unit-area basis. Consequently, the critical angular velocity,

Where

where

The normal stress
This continuum stability criterion establishes that sedimentation begins when the macroscopically averaged centrifugal shear stress exceeds the local magnetic pressure and frictional at the rotor interface. Since the particle chains are considered effectively rigid, meaning that the inter-particle spacing remains essentially constant as ω increases. Consequently, angular velocity does not directly cause chain stretching, and the magnetic dipole-dipole interactions within each chain are maintained. Under this assumption, changes in the magnetic shear stress arise primarily from the redistribution of particle chains within the rotor chamber, for example, increasing eccentricity rather than structural deformation of the chains themselves.
As ω increases, the centrifugal force acting on each particle chain grows proportionally to
As shown in Figure 8, the shear stress for the initial static configuration (
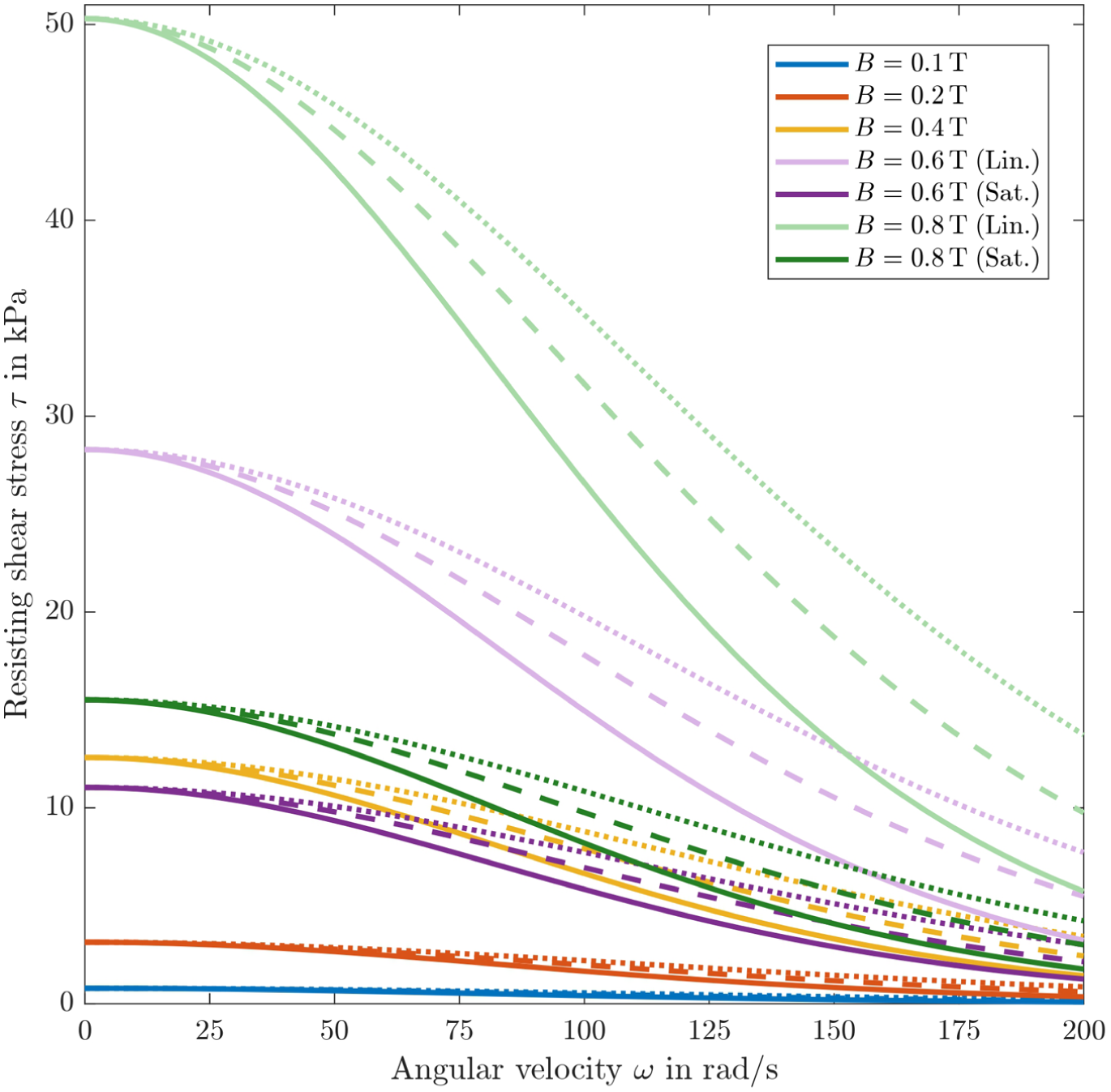
Shear stress
Experimental validation
First, the results for the static case of loss of stability in the magnetic chain will be presented. The second part is dedicated to the experimental results obtained from the dynamic system. The experimental validation is conducted using millimeter-scale spheres and is intended as a qualitative evaluation of the model’s underlying physics. However, the results remain physically scalable to micron-scale CIPs because of the governing force ratios.
Experimental validation of the chain stability under static loading conditions
Since there are no physical constraints on the size of the particles, the experiment is conducted using particles with radii ranging from 0.5 to 1.5 mm. To generate the required magnetic field, a C-shaped electromagnet is used. The experiments are conducted according to the following schema:
Demagnetization of the C-magnet
Offset Measurements: Even though each experiment starts with the demagnetization of the particle chain, achieving absolute zero magnetization is not possible. Therefore, the offset values must be measured using a Hall probe and documented; follow these steps:
– Measure the magnetic induction in the air gap. – Measure the magnetic induction of the spheres.
Positioning of the spheres
Gradual Reduction of current
Reaching the critical value
Measuring and documenting the magnetic field
The first result observed from the experiment is the shape of the chain, which aligns quite well with the analytical prediction as seen in Figure 9.
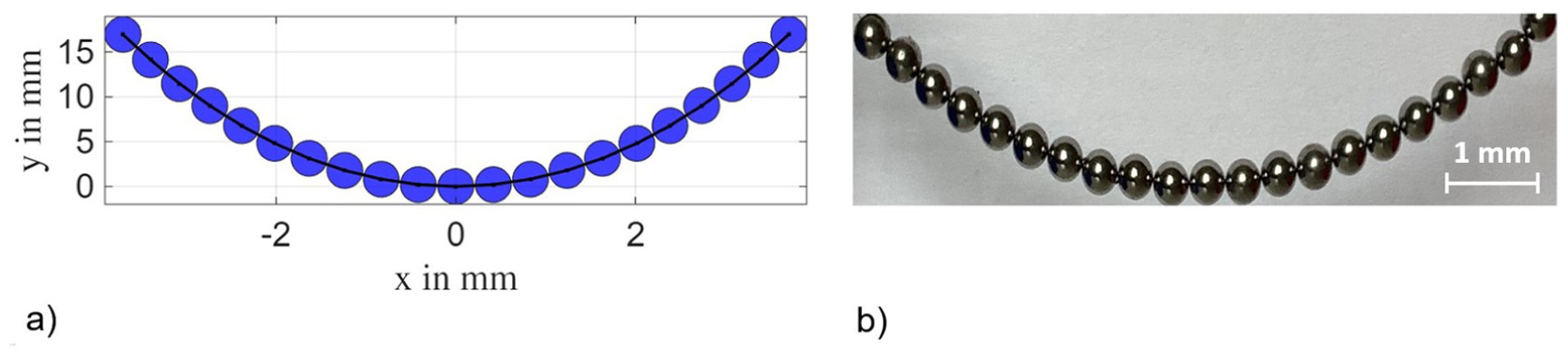
Analytical model (a) and experimentally obtained shape of the chain by a photo (b).
The evaluation of the critical magnetic flux density is shown in Figure 10. As expected, the obtained values show good agreement with the analytical results up to a critical number of particles, which highlights the limitations of the dipole-dipole interaction model.
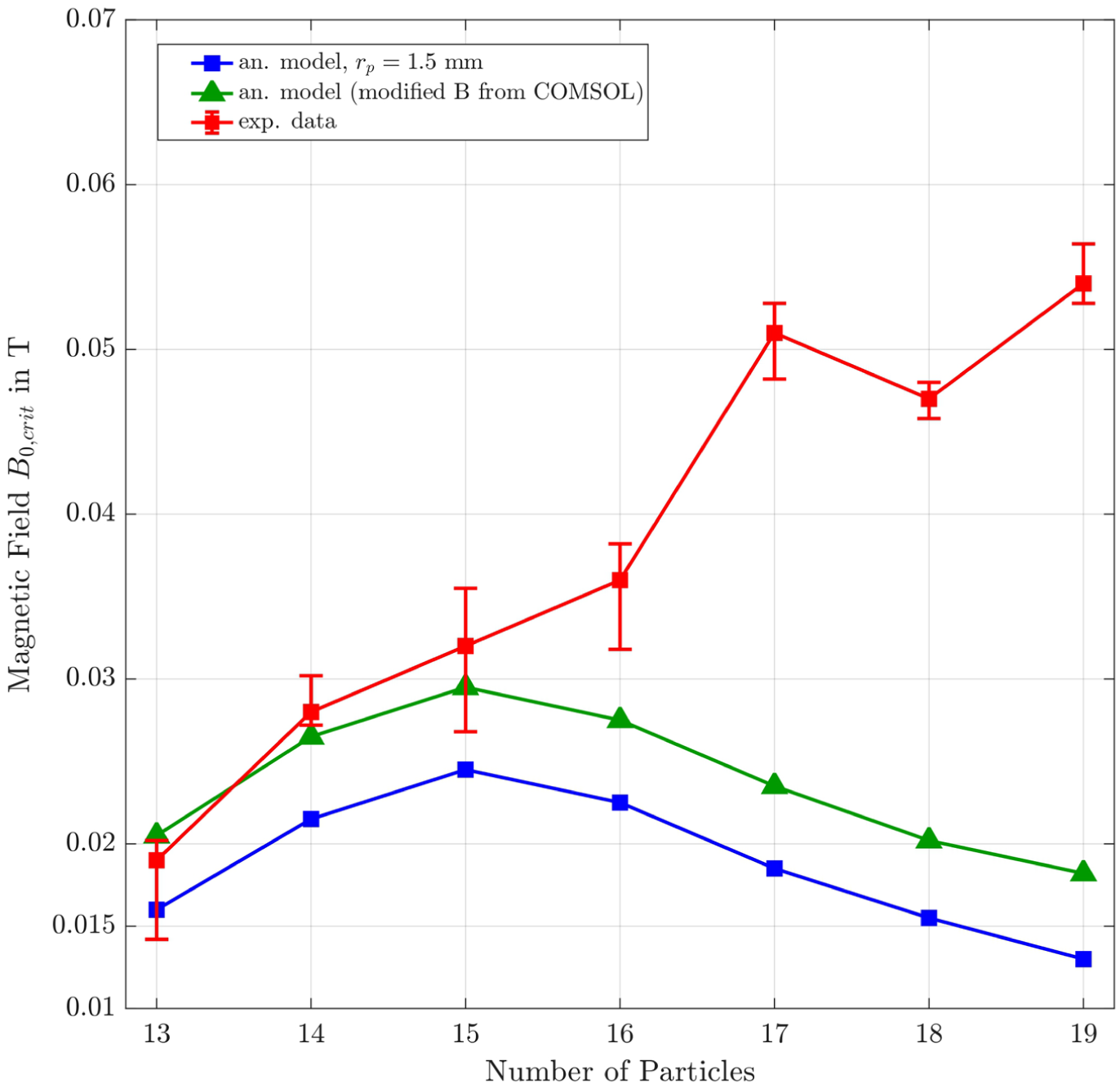
Comparison of analytical, COMSOL-modified, and experimental results for
While the qualitative behavior is consistent, a notable quantitative offset is observed between the analytical (blue) and measured values (red). As shown in the subsequent analysis, the main reason of this discrepancy is the accumulation of magnetic flux at the particle interfaces. This localized intensification of the magnetic flux density within the active region of the chain enhances the inter-particle coupling, leading to a higher threshold for stability.
To address this, COMSOL Multiphysics is employed to perform the numerical calculation of
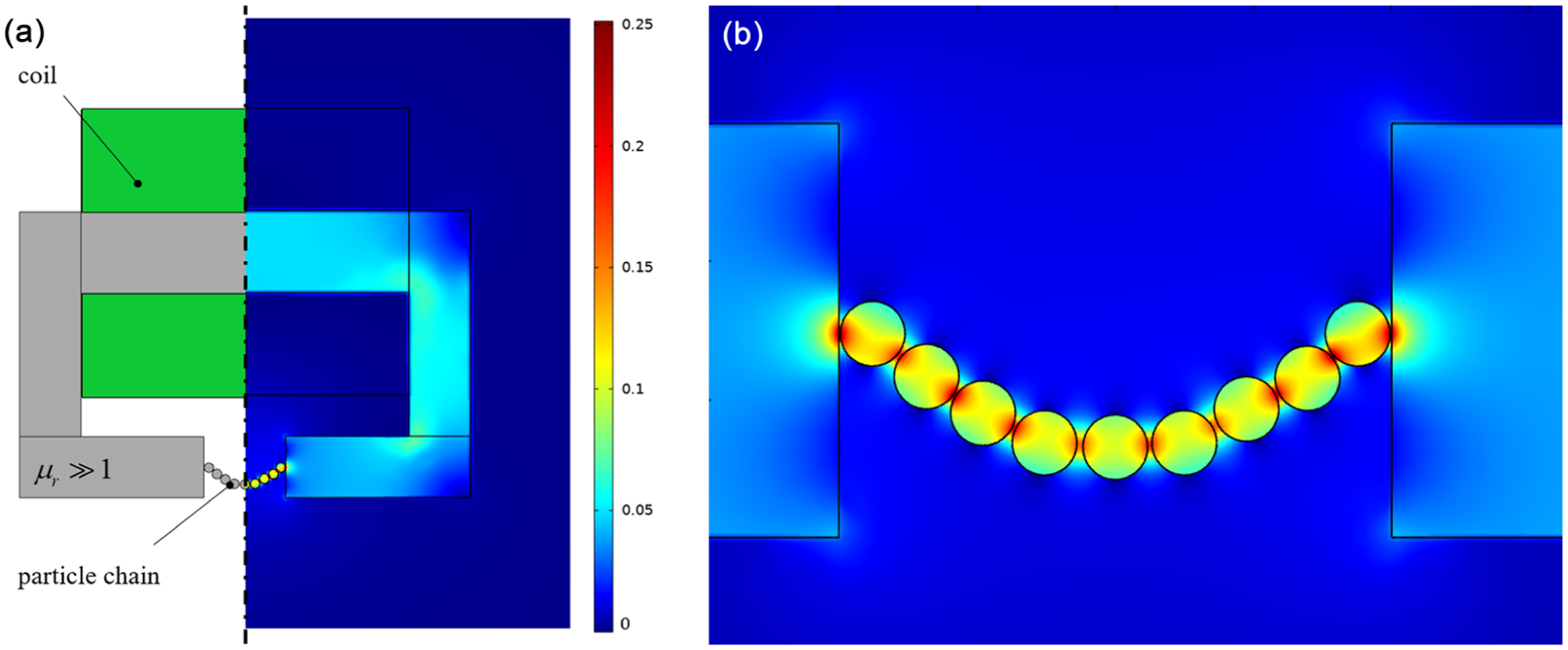
Numerical results of the magnetic flux density: (a) 2-D numerical simulation of a particle chain within the air gap of a C-shaped electromagnet, color scheme: magnitude of the magnetic flux density |
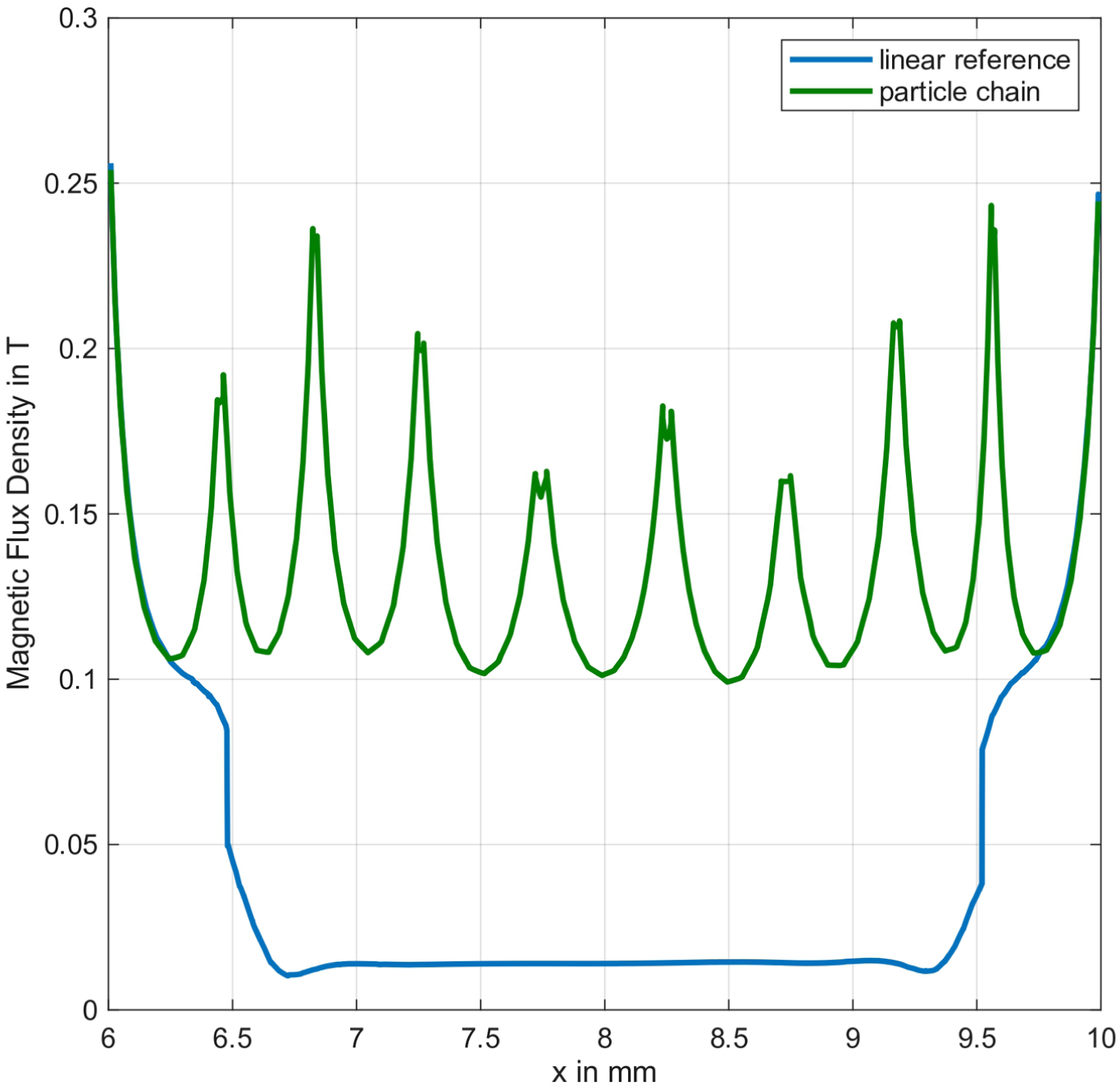
Comparison between the baseline air gap and the enhanced magnetic flux density within the chain structure.
Based on this simulation, the average magnetic flux density along the particle chain is calculated and used to scale the B–H curve of the CIPs providing the modified results shown in Figure 10.
Experimental validation of the particle chain stability under dynamic loading conditions
As already explained, the decisive criterion for the stability of the magnetic chain under the action of a centrifugal force is the angular velocity ω. Therefore, the experiment is designed to measure the critical velocity at which the chain loses its stability. A suitable alternative for assessing the influence of angular velocity on particle chain motion is the method of measuring rotor unbalance.
Measurement methodology by rotor unbalance analysis
Rotor unbalance refers to the unequal mass distribution along the rotor’s axis of rotation, causing centrifugal forces during rotation. The effect of these forces is demonstrated through system vibrations. As described by Schreiner et al. (2022), they are defined by their magnitude (
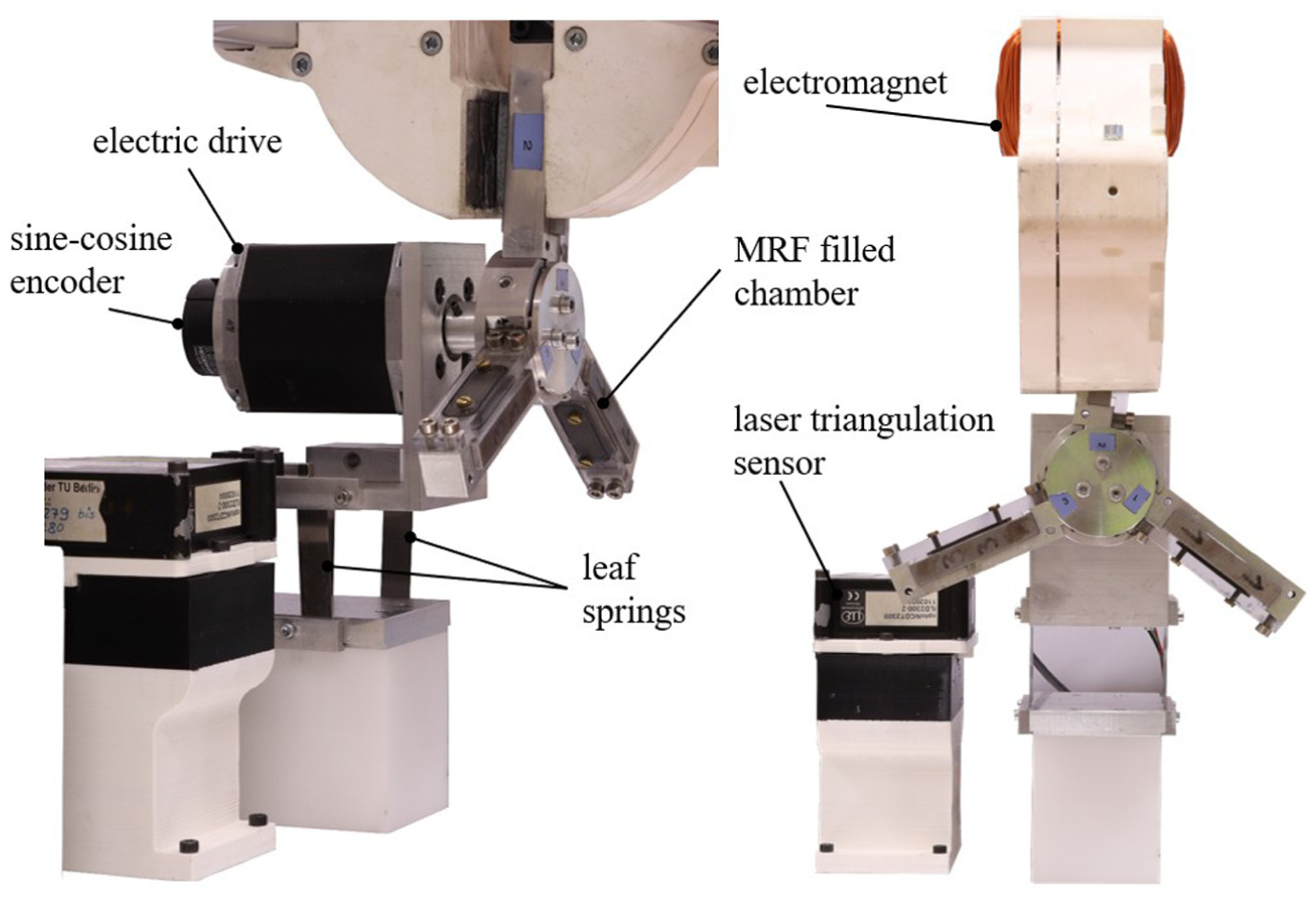
Rotor design: setup used for experimental validation containing the electric drive, the oscillating base plate, the laser triangulation sensor, one chamber filled with MRF and mounted on the rotor, and the electromagnet (Schreiner and Maas, 2024).
A laser triangulation sensor is fixed next to the rotor to capture the movement of the rotor’s frame and measures the amplitude and frequency of the vibration. The analog output from the sensor is digitized using a dSPACE system, which includes analog-to-digital conversion (ADC) to prepare the signal for further processing. Following the signal processing methodology detailed in Schreiner and Maas (2024), the digitized signal is used to isolate the dominant frequency corresponding to the rotor’s angular velocity. Finally, the vibration amplitude and phase angle are used to define the unbalance vector, and a visual representation of the rotor unbalance is plotted on a polar graph.
The unbalance vector calculating process is done as follows:

where
The experiments were conducted to validate both the discrete and continuous models. Three different sphere radii: 0.6, 0.7, and 1 mm were investigated, along with typical MRFs, one containing CIP with radii
Comparison of analytical and numerical results.
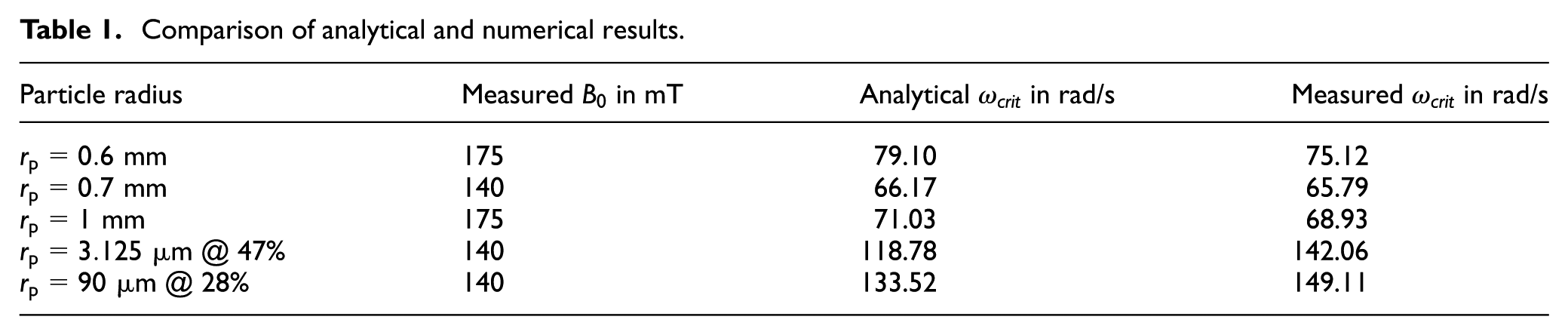
The comparison between the analytical predictions and the experimental results demonstrates good agreement for a discrete number of particles arranged in a single chain. In this case, the predicted critical angular velocities differ only slightly from the measured values. However, when a continuum-based model is considered, the discrepancies become more pronounced. The main factor for this increased variation is the assumption of negligible intra-chain interactions in the analytical formulation.
As a consequence of this simplification, the analytical model consistently underestimates the critical angular velocity compared to experiments as shown in Figure 14.
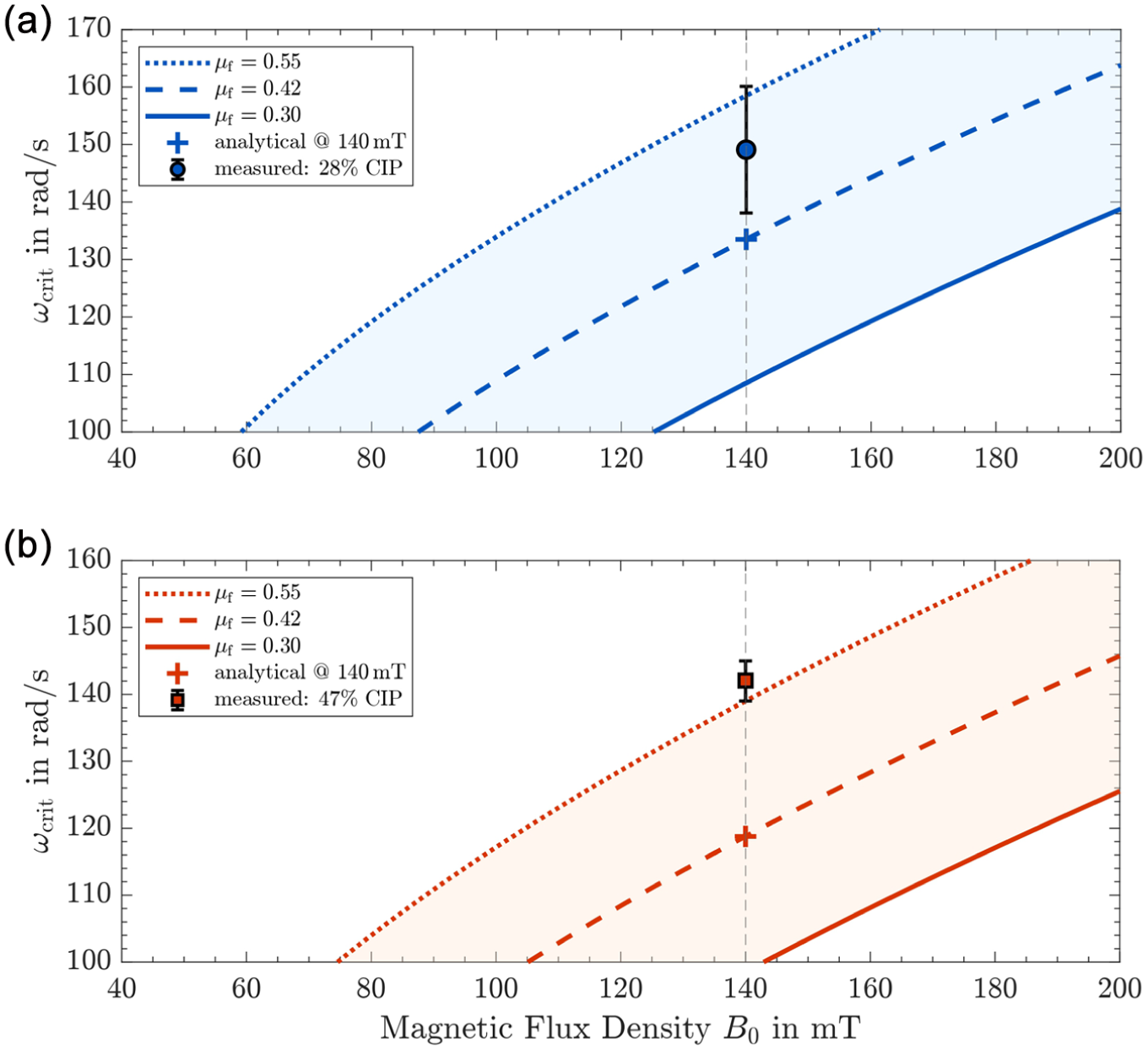
Stability map for the continuum model depicting critical angular velocity
Conclusion and discussion
This study focused on developing a comprehensive framework for predicting the onset of sedimentation in MRFs by integrating analytical modeling, numerical simulations, and experimental validation. The main objective was to apply the dipole-dipole interaction approach to establish a critical threshold governing the onset stability. This threshold describes the interplay among magnetic, gravitational, and centrifugal forces, and defines the conditions under which sedimentation is initiated. Stability criteria were derived by formulating the equilibrium of forces acting on the chain. In the static case, the magnetic field strength emerged as the critical parameter, because the resulting magnetic force is the only force opposing the gravitational force. The dynamic system introduced centrifugal forces that influence the shape and stability of the particle chain. In this case, the stability of the system depends on the interaction between the magnetic, centrifugal, and friction forces. The angular velocity and the coefficient of friction are critical parameters for system stability. However, since the coefficient of friction is an empirical value, depending on contact pairing, the angular velocity becomes the decisive factor in maintaining stability.
Some key findings regarding the sedimentation behavior and stability of particle chains in both static and dynamic scenarios identified in this work include:
In both static and dynamic scenarios, the optimal number of particles that minimizes the total energy of the system reveals a slight sag in the static case and small amplitudes in the dynamic case.
A decrease in particle size improves the onset of sedimentation of the magnetic particle chain, leading to enhanced stability.
Similarly higher magnetic fields provide better results regarding the onset of sedimentation.
In the dynamic case, a higher coefficient of friction contributes to increased chain stability, while an increase in angular velocity accelerates the onset of the sedimentation process.
The fundamental limitation of the implemented model is the assumption that the magnetized particles align into single chains and the distance between chains is sufficiently large; therefore, future work should focus on addressing this assumption. Semi-analytical or combined experimental and numerical studies could investigate scenarios where multiple chains interact closely, leading to collective responses and deviations from idealized alignment. Accurate determination of the friction coefficient is essential to ensure the reliability and predictive capability of the proposed approach. Future investigations may focus on extending the current framework to explicitly address these limitations, thereby improving the quantitative agreement between analytical predictions and experimental observations and enhancing the overall predictive accuracy of the model.
Footnotes
Appendix 1. Derivation of the catenary governing equations
In this appendix, the full algebraic procedure for the continuum limit of the magnetorheological particle chain is detailed.
Appendix 2. Calculation of the total magnetic field - hyperbolic chain
This appendix details the component-wise calculation of the magnetic force. The derivation follows three steps: computing the vector products, determining the field gradients, and calculating the final scalar products.
The position vector
The magnitude is:
The separation vector
where
The local magnetic field
For the x-component
For the y-component
Appendix 3. Derivation of the chain shape governing equation
In a rotating reference frame, we consider an infinitesimal element dm. Applying Newton’s second law in the tangential (z) direction, the force balance is:
Neglecting the gravitational component, the equation simplifies to:
Following the transformation from discrete coordinates to a mass density parameter
Appendix 4. Calculation of the total magnetic field - parabolic chain
This appendix presents the component-wise calculation of the magnetic field and force for a parabolic particle chain. The derivation follows the same three-step procedure as Appendix 2: evaluation of vector products, construction of the magnetic field, and calculation of the spatial gradients.
The separation vector between particles i and j along a parabolic chain is
Its magnitude is
The scalar product with the external field reads
Multiplication yields
The derivative of the distance is
Axial Component
Radial Component
Ethical considerations
This article does not contain any studies with human or animal participants.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data will be made available on request.