
Abstract
The patch-type biomedical sensor attached to human skin by a soft conductive adhesive layer has a good application potential in human healthcare. However, the complex strain of human skin can cause damage to the adhesive interface which can lead to signal drift and affect the long-term service reliability of the sensors. It is imperative to predict the trend of interfacial damage and signal drift and develop compensation method to enhance the sensor service reliability. In this work, a three-dimensional cohesive zone model (CZM) coupled with electrical damage was proposed to simulate the interfacial damage and signal drift behavior of sensor electrode with soft conductive adhesive layer. The viscoelastic behavior of the soft interface was described by the Wiechert model, and electrical damage behavior was incorporated into the CZM. The different electrical damage evolution mechanisms for normal and tangential loading were introduced based on experiments. The model was tested by tensile-shear tests with various normal and tangential loading combinations, and the effectiveness of the CZM in characterizing the mechanical and electrical damage behavior of soft conductive interface in complex loading conditions was verified. Then, the model was employed to predict the signal drift of the sensor electrode in cyclic torsional loading. The simulation results are in good agreement with the experiments. This work provides a numerical strategy for predicting the electrical signal drift of sensor electrodes under complex loading cycles.
Introduction
With the development of flexible electronics and the Internet of Things, wearable health testing sensors have gained a lot of research (Cheng et al., 2021; Lyu et al., 2021). These sensors acquire physiological signals via skin adhesion and contribute to the real-time monitoring of health status during routine daily activities and clinical therapy. For example, flexible electrocardiographic (ECG) patches for cardiovascular disease prediction (Park et al., 2018), flexible UV monitoring patches for detecting the intensity of ultraviolet rays on the skin (Lee et al., 2021), temperature patches for detecting the temperature of the human body's surface (Gandla et al., 2020), and flexible electrochemical monitoring patches for analyzing the glucose content of sweat in the epidermis (Liu et al., 2022b). These skin patch-type flexible health detection sensors have large market potential due to the advantages of being lightweight, portable, and having no interference with people's normal lives. However, how to realize stable signal transmission between the heterogeneous interfaces of human skin and sensors is a critical issue that needs to be addressed before these sensors to be large-scale application. The ECG patch, for instance, typically comprises an adhesive conductive hydrogel layer sandwiched between the sensor electrodes and the skin, as illustrated in Figure 1. This layer is essential for ensuring the stable transmission of physiological electrical signals (Li et al., 2021a, 2021b; Liu et al., 2022a). In long-term service, external factors such as skin strain, body temperature, or perspiration can cause damage to the hydrogel adhesion interface. This can result in a drift of the transmitted electrical signal and a decrease in the sensor's detection accuracy. Thus, the enhancement of the long-term service reliability remains a pivotal challenge in the ongoing development of wearable sensors. The development of a mechanical-electrical damage model for the skin-sensor interface under long-term working conditions to predict the law of electrical signal drift and to develop a signal drift compensation algorithm is crucial for the improvement of the detection accuracy and the reliability of the sensor.
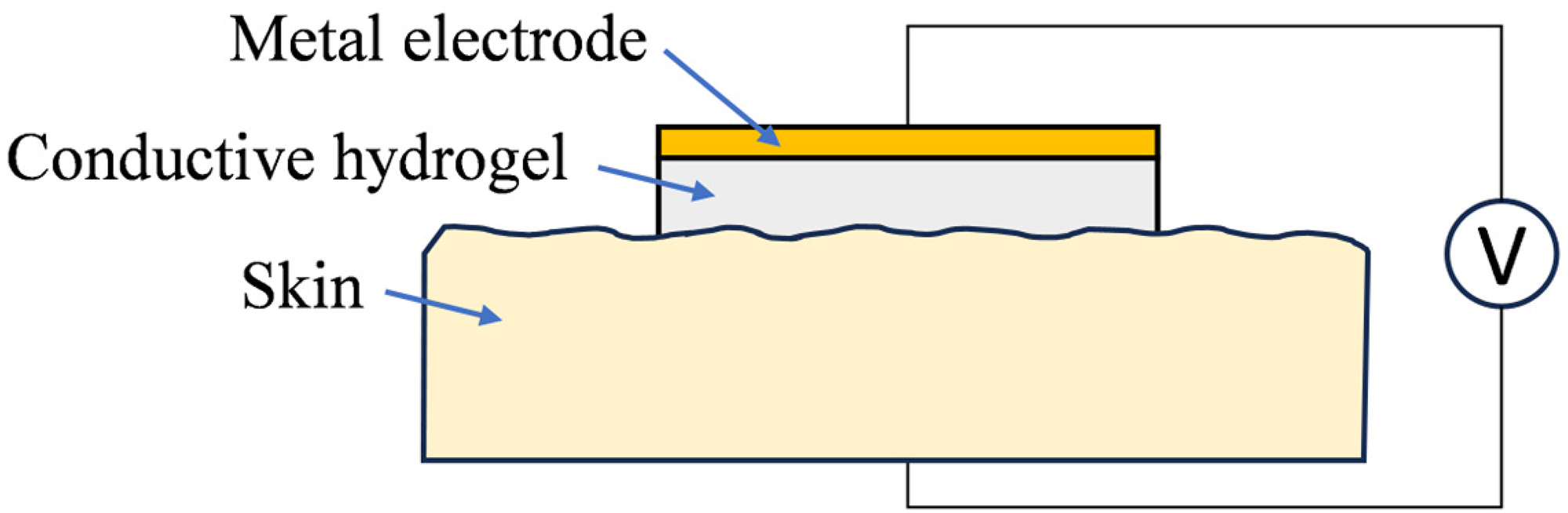
Schematic diagram of skin-sensor interfaces with conductive hydrogel layer.
The cohesive zone model (CZM) has attracted considerable attention in the characterization of interfacial damage and fracture. After the CZM was firstly proposed and implemented in finite element method (Dugdale, 1960; Hillerborg et al., 1976), many variations of the cohesive law were developed and successfully implemented to simulate interface failure (Alfano and Crisfield, 2001; Chandra et al., 2002; Tvergaard and Hutchinson, 1993). In recent decades, many CZMs with fatigue damage evolution law were developed to simulate the failure process of interfaces under cyclic loading. For example, Nguyen et al. (2001) proposed a fatigue cohesive law in which the cohesive traction is related to loading cycles with exponential decay law. Roe and Siegmund (2003) considered the irreversible accumulation of damage through the cycling process and developed a fatigue damage evolution law. Yang et al. (2004) developed a fatigue damage law based on the assumption that the damage is a function of accumulated plastic strain in cyclic loading. Compared to traditional material interfaces, the hydrogel adhesive layer is a soft material that exhibits large deformation, nonlinearity, and significant viscoelastic properties (Yang et al., 2024; Yuk et al., 2022). In recent years, many extended CZMs that integrated rate-dependent cohesive law have been developed to characterize the interfacial failure in viscoelastic soft adhesive layers. Some researchers developed the rate-dependent CZMs by assuming the fracture energy and cohesive strength is related to the loading rate by a simple linear or nonlinear function on the basis of phenomenological method (May et al., 2015; Valoroso et al., 2014; Zhou et al., 2005). It should be noted that the cohesive strength of a soft adhesive interface is determined not only by its fracture energy release rate but also by the energy release rate resulting from the deformation within the soft material matrix which is significantly loading rate dependent. Alternatively, physically informed studies adopt viscoelastic materials to construct CZMs, and a variety of rheological models have been employed to depict the viscoelastic response throughout the debonding process (Allen and Searcy, 2001; Xu et al., 2003a; Xu et al., 2003b). Musto and Alfano (2013, 2015) proposed a novel rate-dependent CZM that couples damage and viscoelasticity, based on the premise that intrinsic fracture energy is rate-independent while damage evolution correlates with both the current free energy and the intrinsic fracture energy. Many researchers then improved the CZM by other viscoelasticity models or rate-dependent damage law. The rate-dependent CZMs are considered as a useful computational tool for simulating the failure process of soft adhesive interface with viscoelasticity (Bocciarelli, 2022; Yang et al., 2021; Zhao et al., 2021).
However, the signal drift of patch-type sensor is commonly induced by the resistance change of the hydrogel interface due to the mechanical damage behavior of the adhesive layer during the long-time service. The current CZMs only focus on the mechanical damage and have not addressed the influence of mechanical damage on the interfacial conductivity. To predict the problem of sensor signal drift, it is crucial to study the electrical damage behavior of the hydrogel adhesive interface as well as its mechanical damage. Therefore, this work proposed a rate-dependent CZM with mechanical-electrical damage during cyclic loading to simulate the conductivity deterioration of the conductive hydrogel layer and to predict the signal drift of the patch-type sensor in fatigue loading.
Rate-dependent CZM with electrical damage
Viscoelastic mechanical behavior of the CZM model
To account for the viscoelastic behavior of the soft adhesive layer, a three-dimensional rate-dependent CZM was established. The Wiechert model, comprising two springs and a dashpot, is employed to describe the mechanical behavior of the cohesive zone in both the normal direction and two tangential directions, as illustrated in Figure 2. The stiffnesses of the two springs are denoted by

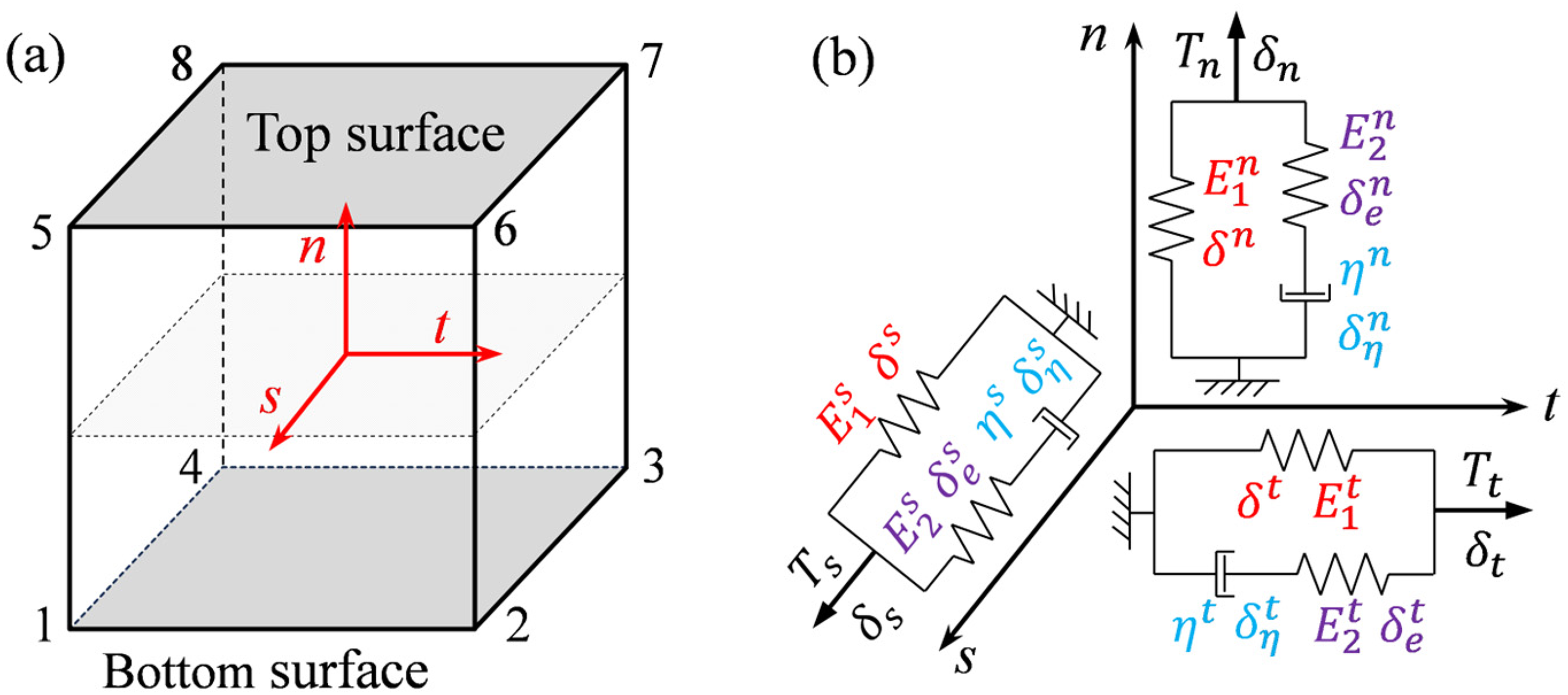
The schematic of (a) three-dimensional cohesive element and (b) viscoelasticity model in n-t-s directions.
The

The mechanical behavior of the soft interface in t-direction and s-direction is considered the same, thus, an equivalent traction in the shear direction is defined to simplify the model calculation process:


Similar to previous work (Sun et al., 2022), the mechanical damage

With the introduction of two stiffness ratios

Correspondingly, the strain energy associated with mixed-mode deformation is expressed by the following relation
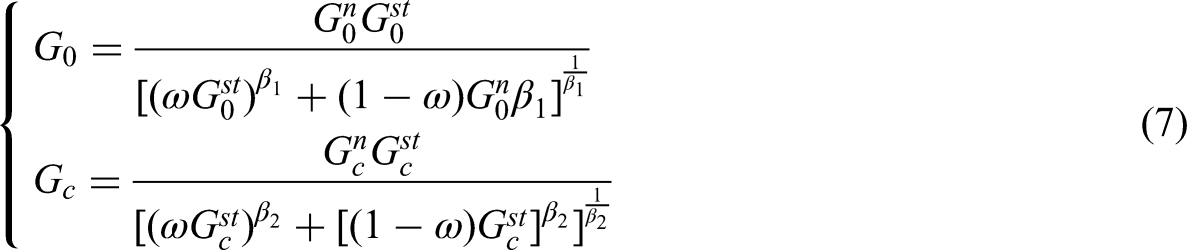
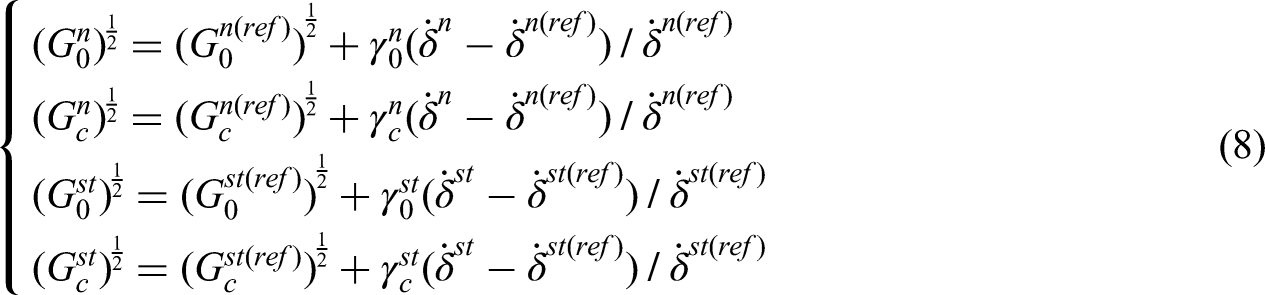
Based on the fundamental framework of single-mode (Camanho et al., 2003), the equivalent parameters corresponding to interfacial damage initiation and fracture energy of the mixed-mode are theoretically derived accordingly:
Electrical damage evolution law of the CZM
The electrical damage is also incorporated into the CZM in this work. The electrical damage is defined as the conductive decrease rate of the interface and it is expressed by
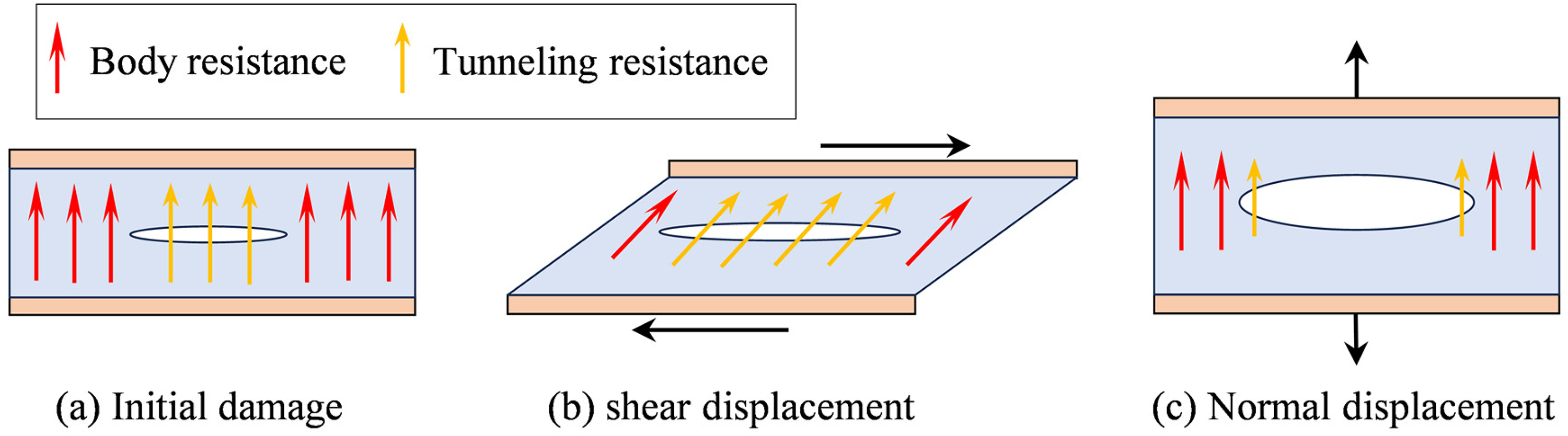
Electrical damage evolution behavior of interface under different loading modes.
To further analyze the relationship between electrical and mechanical damage, pure shear and normal tensile tests were carried out on the conductive hydrogel adhesive interface, as shown in Figure 4. The interfacial sample for the tests consisted of two conductive silicone rubbers and a conductive hydrogel layer. During the loading process, the tensile experimental platform was used to obtain the traction force and traction displacement relationship of the interface, and the resistance change of the adhesive interface was monitored in real time by a source meter. Figure 4(b, e) shows the interfacial traction–displacement relationships and interfacial resistance change curves obtained from pure shear and normal tensile tests, respectively. The mechanical damage of CZM represents the loss of interfacial stiffness (Wu and Yao, 2010), that is,

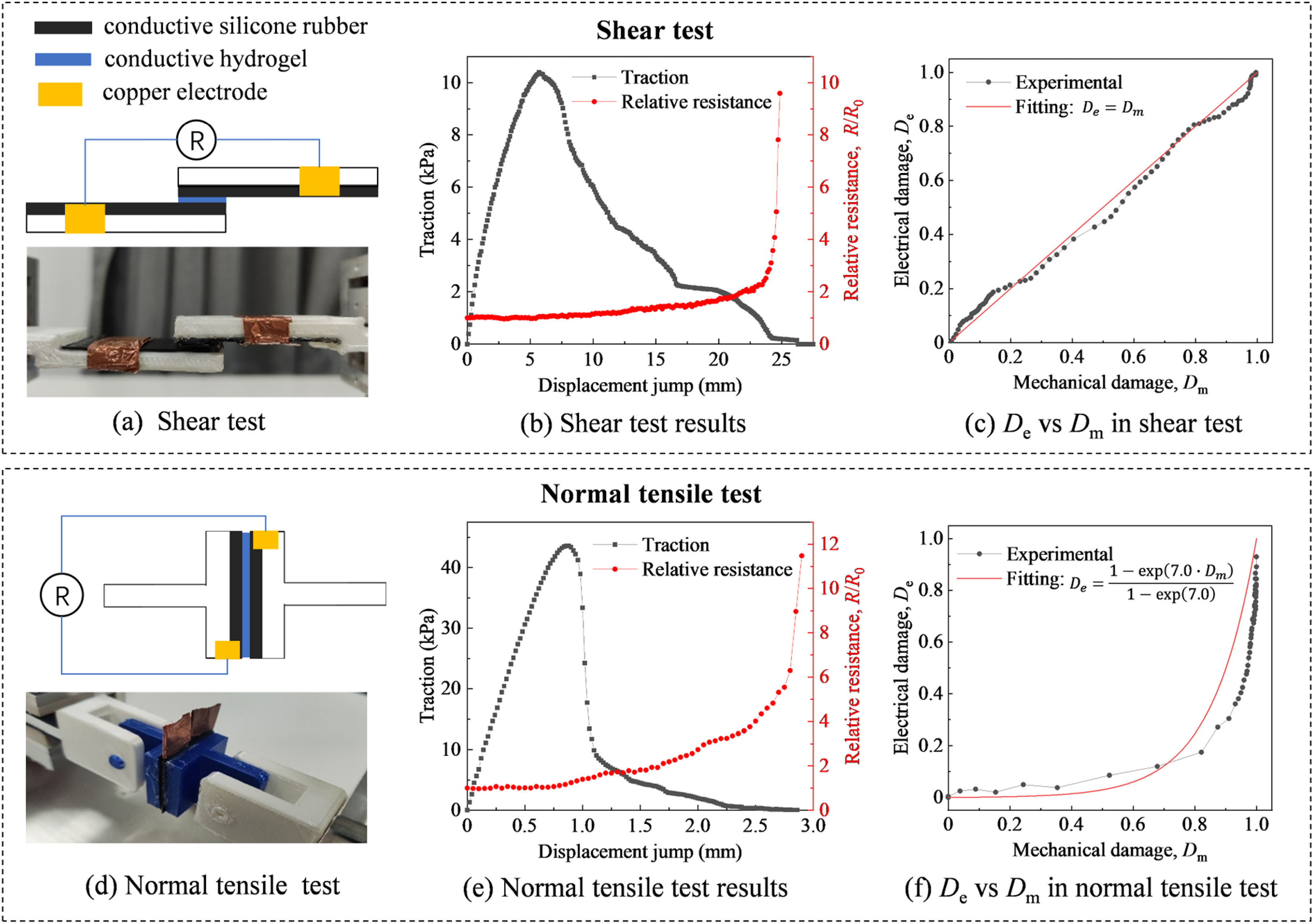
The shear and normal tensile tests on the conductive hydrogel adhesive interface.
Considering the viscoelastic mechanical behavior of the conductive hydrogel adhesive interface, the resistivity of the interface is as rate-dependent as its mechanical behavior, and the resistivity is approximately linearly related to the magnitude of stress (Ding and Chen, 2019; Gao et al., 2020) without damage. Thus, considering the combined effects of damage evolution and stress on interfacial resistivity, the expression for interfacial resistivity can be written as:

Implementation of the proposed CZM
The proposed CZM coupled with mechanical and electrical damage behavior was implemented in ABAQUS program by UEL. The equilibrium equation for mechanical and electrical problem of the cohesive zone can be expressed as:


The three-dimensional cohesive zone element is an eight-node element. To address the issue of large deformations, a local coordinate system was defined for the deformed element, and a rotation matrix was employed to establish its connection with the global coordinate system. The nodal “displacement” vector of each node in the global coordinate system is denoted as (

The “displacement” vector of the element in global coordinate system can be deduced as:


In this formulation,

The specific form of this matrix can be derived on the basis of equation (4). The electrical conductivity

Validation of the CZM model and parameters determination
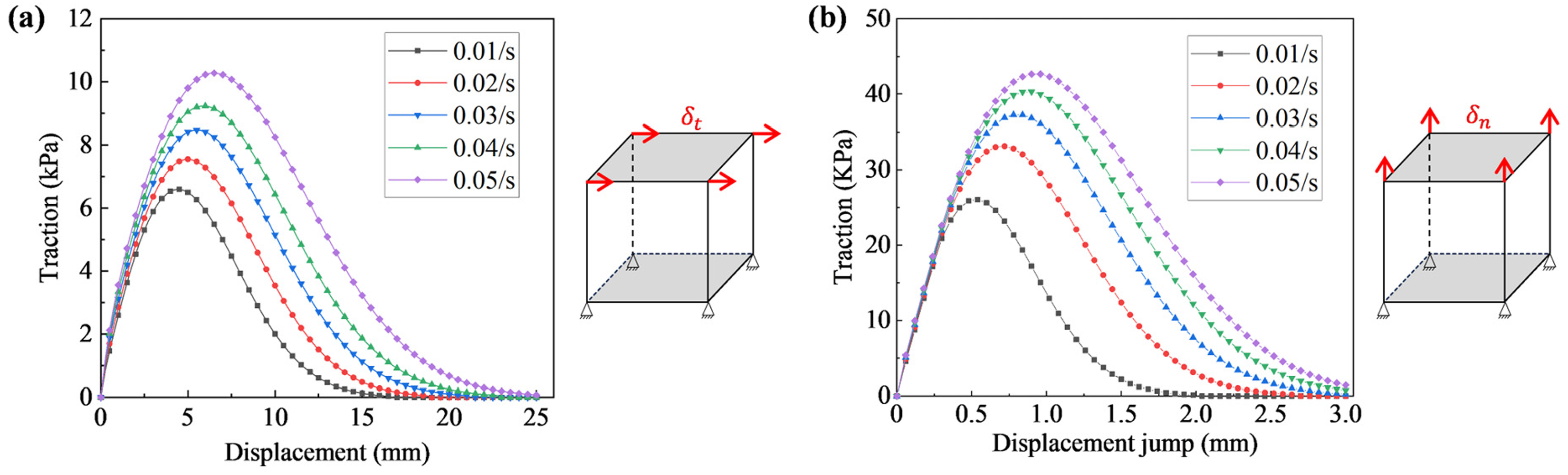
The benchmark test of the proposed CZM was conducted on a three-dimensional 8-node cohesive element. First, the mechanical response of the self-defined cohesive element was verified. The experimental results of mechanical responses of the hydrogel adhesive interface under shear and tensile tests with loading rates varying from 0.01 s−1 to 0.05 s−1 are presented in Figure 5. It shows that the stiffness and strength of the interface increase significantly with the increasing loading rate, which indicates that the mechanical behavior of the interface is loading rate-dependent. Figure 6 shows the simulation results of mechanical behavior of the cohesive element in shear and normal tensile with different loading rates. It can be seen that the rate-dependent mechanical responses obtained from the simulation are consistent with the experiments, which verifies the validation of the proposed CZM in describing the mechanical behavior of the hydrogel adhesive interface with viscoelastic characteristics. Subsequently, by comparing the simulation and experimental results of hydrogel adhesive interface mechanical and damage behavior in shear and normal tensile loading, the material parameters of the proposed CZM for the hydrogel adhesive interface were obtained and listed in Table 1.
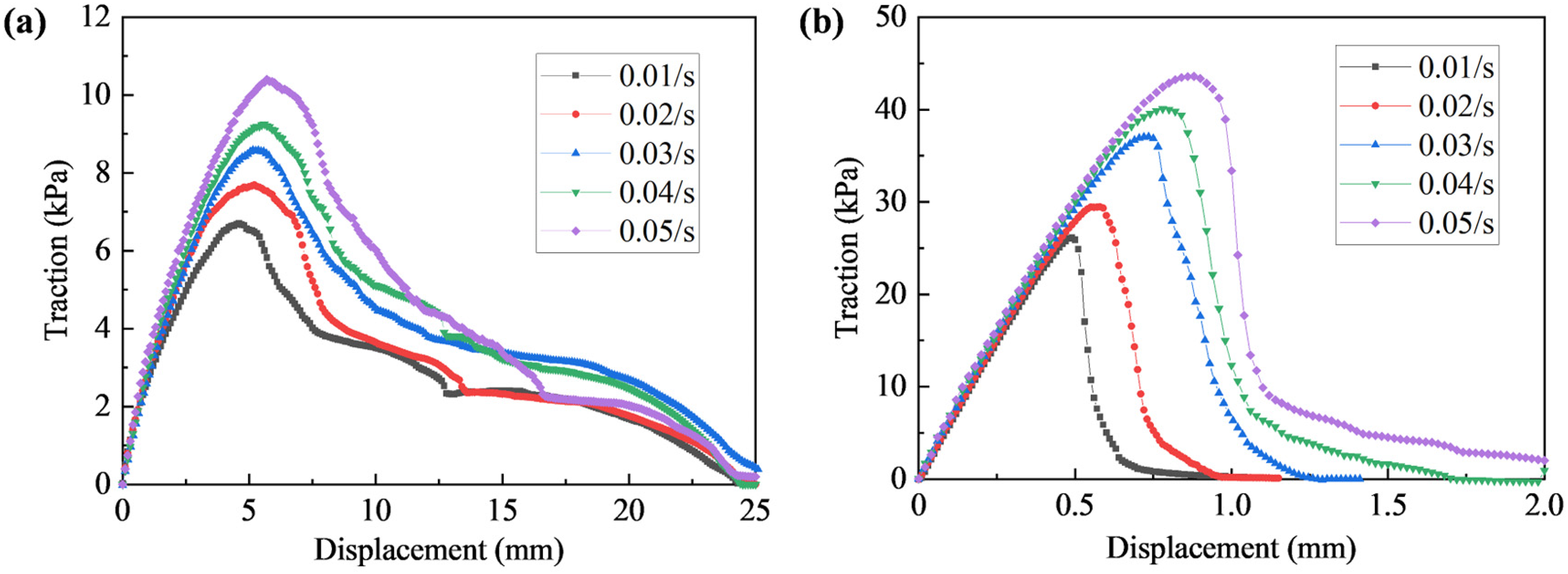
Experimental results of mechanical responses of the hydrogel adhesive interface under (a) shear tests and (b) normal tensile tests with different loading rates.
Mechanical response test on a single element: (a) shear test, (b) normal tensile test.
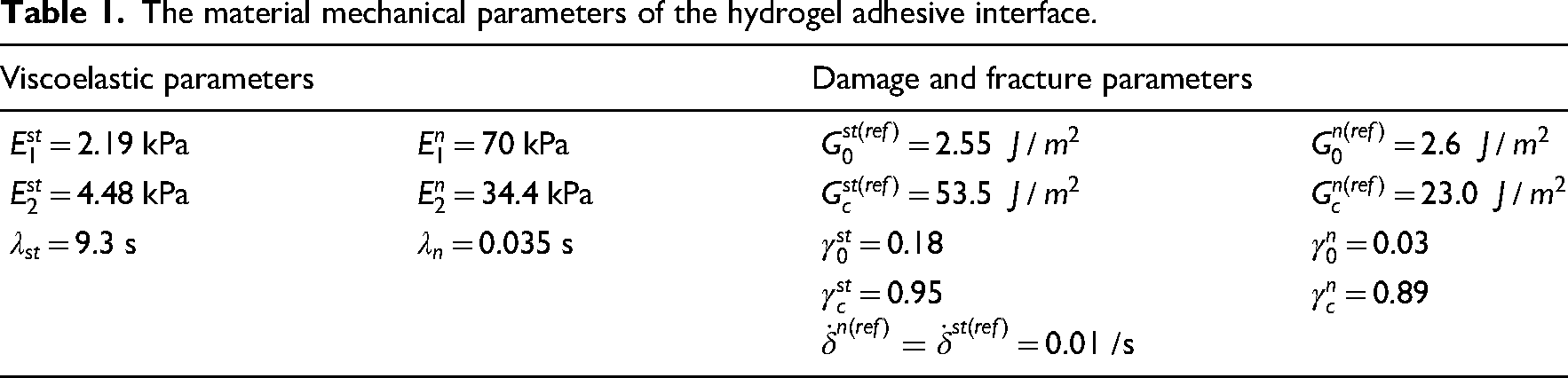
The material mechanical parameters of the hydrogel adhesive interface.
To verify the effectiveness of the proposed CZM for characterizing the variation of electrical conductivity of the hydrogel adhesive interface under loading conditions, tensile and shear tests were performed on the interface at various loading rates, and the interface resistance variation was tracked. The resistance variation of the hydrogel interface in normal cyclic tensile with a maximum displacement jump of 0.3 mm is shown in Figure 7(a). It can be seen that the fluctuation amplitude of the interfacial electrical resistance decreases with the increase of loading rates. The same conclusions can also be found in cyclic shear tests with a maximum displacement jump of 1 mm as shown in Figure 7(d). The simulations of normal tensile and shear tests were conducted with different k values as shown in Figure 7(b, e). It can be seen that the simulation result of electrical resistance fluctuation was consistent with the experiment while
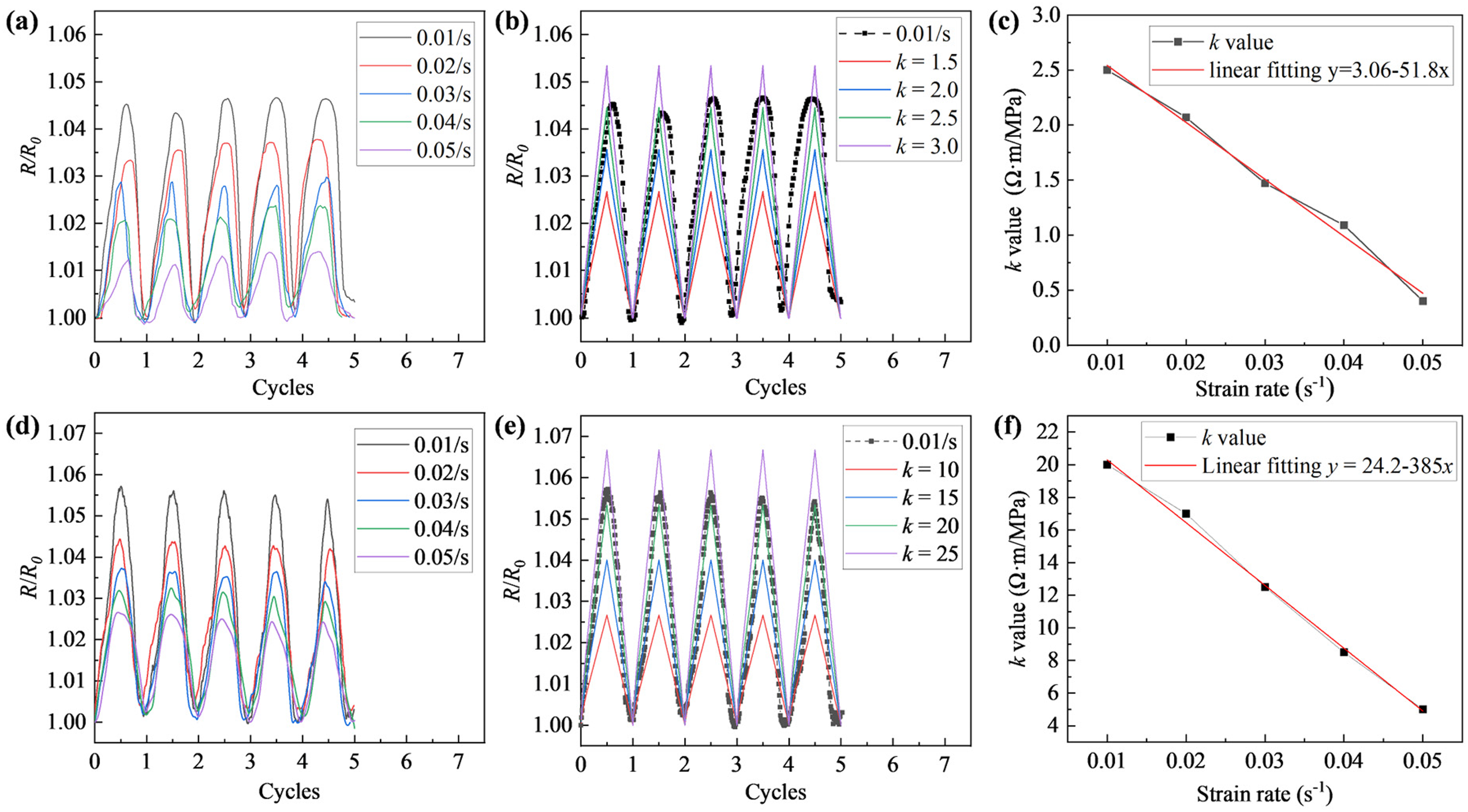
The resistance variation of hydrogel interface under (a) normal tensile and (d) shear tests under different loading rates, and the comparison of simulation results with different k values between experimental results of resistance variation in (b) normal tensile and (e) shear tests with loading rate of 0.01/s, and the fitting results of the variation of k value versus the loading rates in (c) normal tensile and (f) shear tests.
To further verify the validation of the proposed CZM in characterizing the mechanical and electrical damage behavior of the interface under complex cyclic loading conditions, a series of combined tensile-shear tests were performed as shown in Figure 8(a). By utilizing fixtures with different inclination angles, the tests of mechanical and electrical damage behavior of the adhesive interface under different stress conditions can be realized. In the experiment, the specimen dimension is 20 mm × 20 mm × 1 mm, and cyclic displacement loading of 0.5 mm was applied at a loading rate of 0.05/s. Figure 8(b–d) shows the experimental results of the variation of traction and electrical resistance of the hydrogel adhesive interface under different tensile-shear combined loading conditions in 100 loading cycles. It can be seen that with the increase of angle
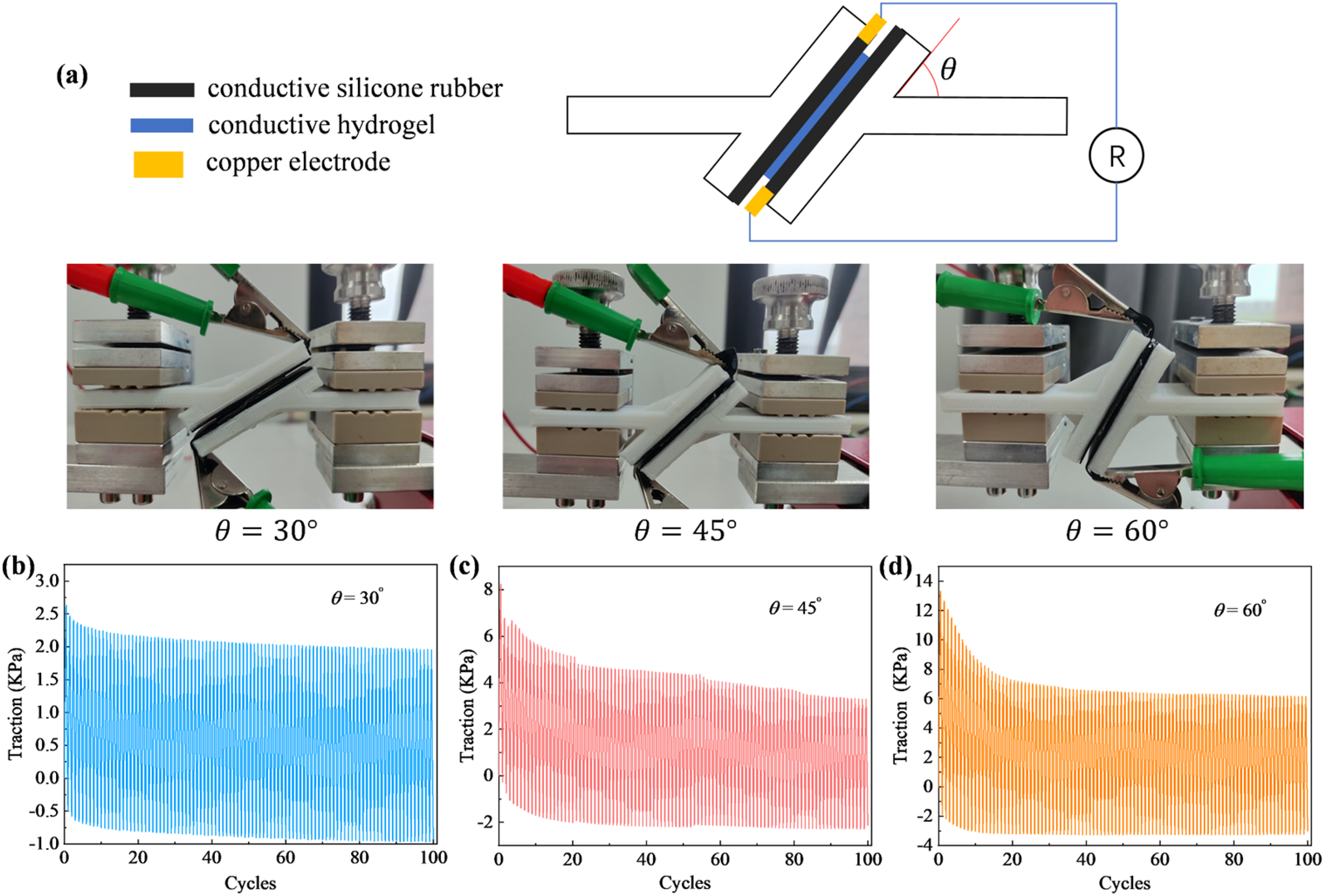
The combined tensile-shear tests on the conductive hydrogel adhesive interface: (a) schematic and physical diagrams of the tests, and the test results of interfacial traction variation with (b) 30°, (c) 45°, and (d) 60° angle in the fixture.
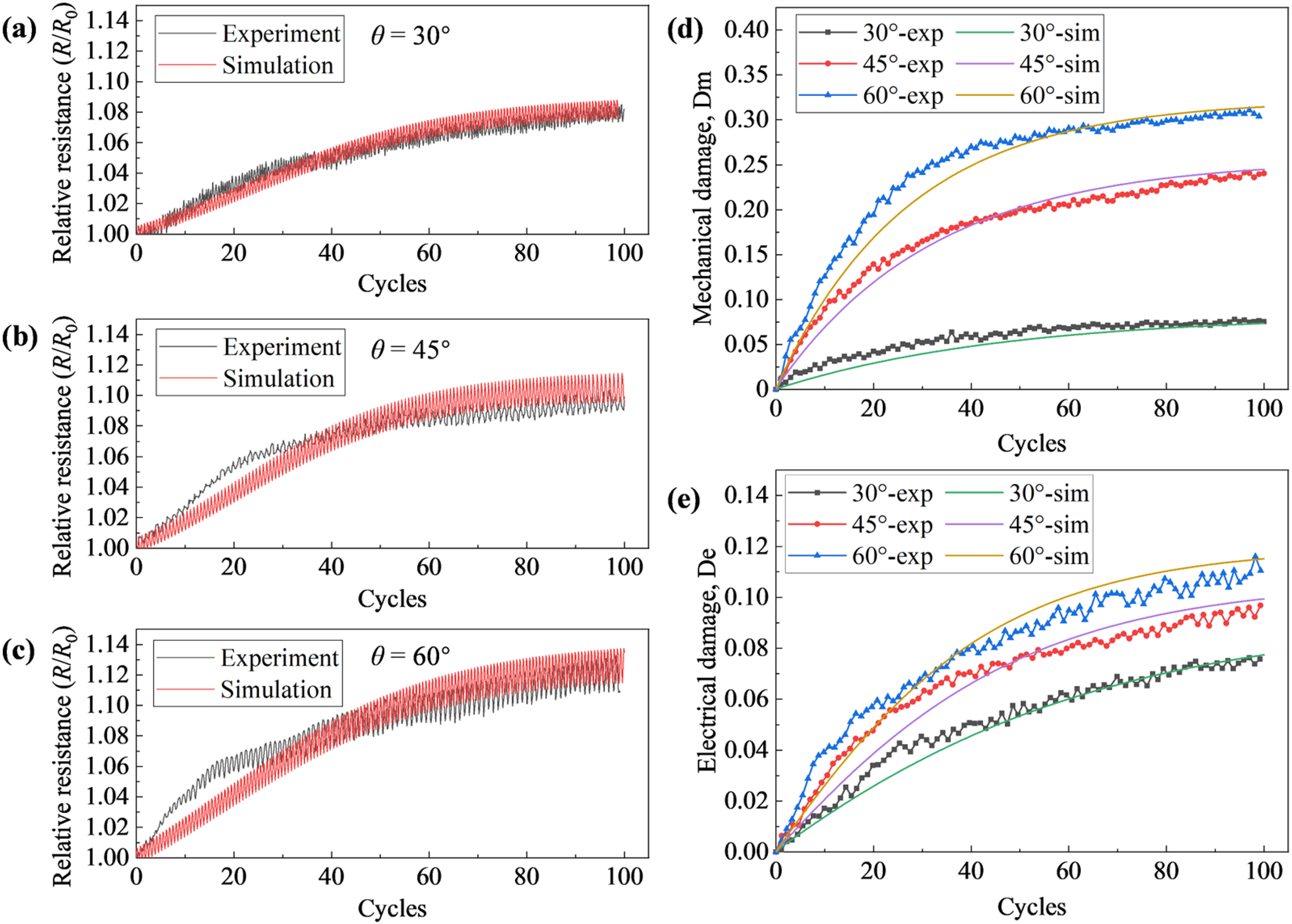
The simulation and experimental results of (a–c) the electrical resistance variation during combined tensile-shear tests, and (d, e) the mechanical and electrical damage evolution of the hydrogel adhesive interface under different cyclic tensile-shear loading condition.
According to the decrease of interfacial stiffness and the increase of interfacial electrical resistivity, the evolution of mechanical damage
Application of the CZM for signal draft prediction
The proposed CZM was adopted for simulating the electrical signal drift of the patch-type sensor induced by interfacial damage. First, the experiments of electrode interface damage behavior in cyclic loading were conducted, and the experimental method is shown in Figure 10. The copper electrode with size of 10 mm × 10 mm is attached to the conductive silicon rubber (instead of human skin) by conductive hydrogel adhesive layer. The thickness of the hydrogel adhesive layer is about 1.0 mm. To test the fatigue damage behavior of the interface under complex loading conditions, the specimen was loaded by cyclic torsion, and the electrical resistance of the hydrogel interface was monitored in real-time during the test. Figure 11(a) presents the finite element model of the specimen. The user-defined cohesive element was applied to model the hydrogel adhesive layer. Simulation tests were conducted using cohesive elements of different sizes, and the results indicated that the mechanical and electrical damage behavior of the hydrogel adhesive interface is almost insensitive to the size of the cohesive elements. Therefore, to reduce computational costs, the dimensions of the cohesive element were set to 1 mm × 1 mm × 1 mm. The elastic modulus of conductive silicon rubber is 1.3 MPa, and electrical conductivity is 9.5 S/m. The elastic modulus of the copper electrode is defined as 120 GPa, and the electrical conductivity is 5.9 × 107 S/m. A zero electric potential was applied in the bottom surface of the conductive silicon rubber, and 1 V potential was applied in the upper surface of the copper electrode.
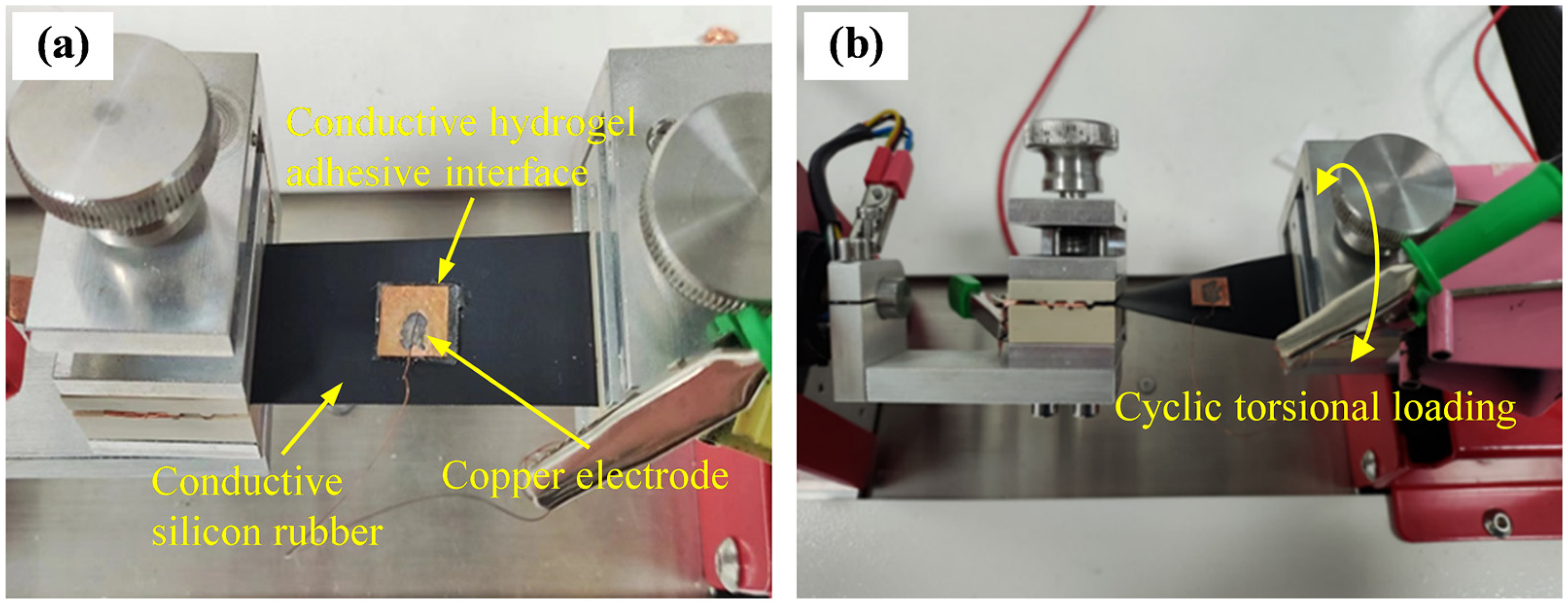
Experiment of conductive hydrogel adhesive interface electrical damage behavior: (a) specimen clamping method, (b) cyclic loading method.
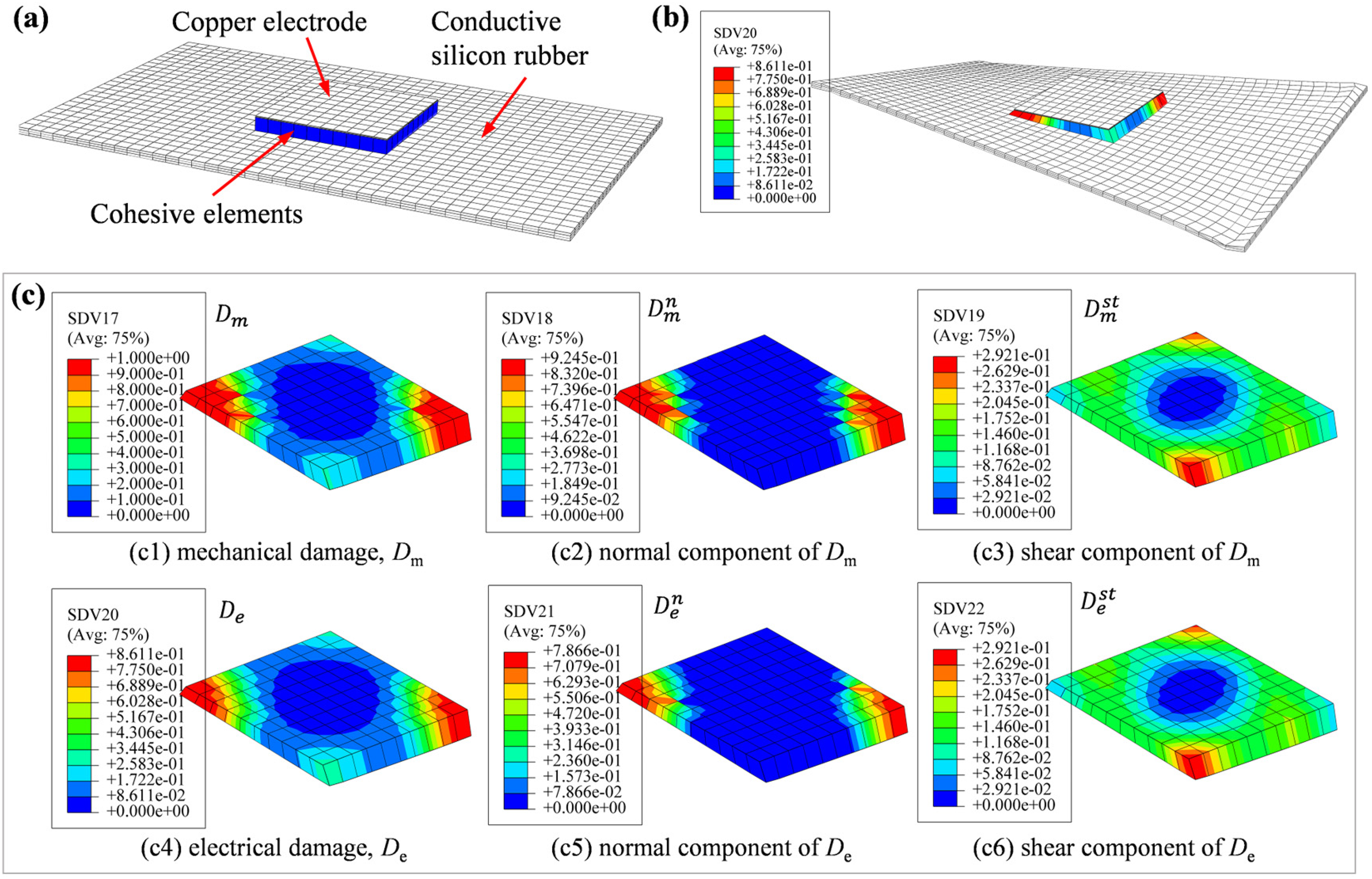
Simulation of interface damage by the proposed cohesive zone model (CZM): (a) finite element model, (b) simulation results in cyclic torsion, and (c) distribution of mechanical and electrical damage in the hydrogel adhesive layer after 100 torsional loading cycles (SDV 17 represent mechanical damage Dm, SDV 18 and SDV 19 is the normal and shear component of the mechanical damage; SDV 20 represent electrical damage De, SDV 21 and SDV 22 are the normal and shear component of the electrical damage).
The simulation results of the interface fatigue damage during cyclic torsion with the torsional angle of −30°∼30° and loading rate of 6°/s are presented in Figure 11(b, c). Significant mechanical and electrical damage was observed in the edges of the hydrogel interface, which caused by the tensile and shear loadings during the torsion cycles. By comparing the normal and shear components of the mechanical and electrical damage in Figure 11(c), it can be seen that the normal damage component is much larger than the shear damage component in the corner of the hydrogel adhesive layer. Figure 12 presents the mechanical and electrical damage evolution curve of one element of the hydrogel adhesive layer during 100 loading cycles. In Figure 12(a), it shows that the normal mechanical damage component dominates the mechanical damage evolution in the loading cycles. The normal component of electrical damage is lower than of the shear component first, and then gradually dominates the electrical damage evolution as shown in Figure 12(b). This is because the shear component of electrical damage is linearly related to shear mechanical damage, while the normal component of electrical damage is exponentially related to normal mechanical damage as defined in equation (9).
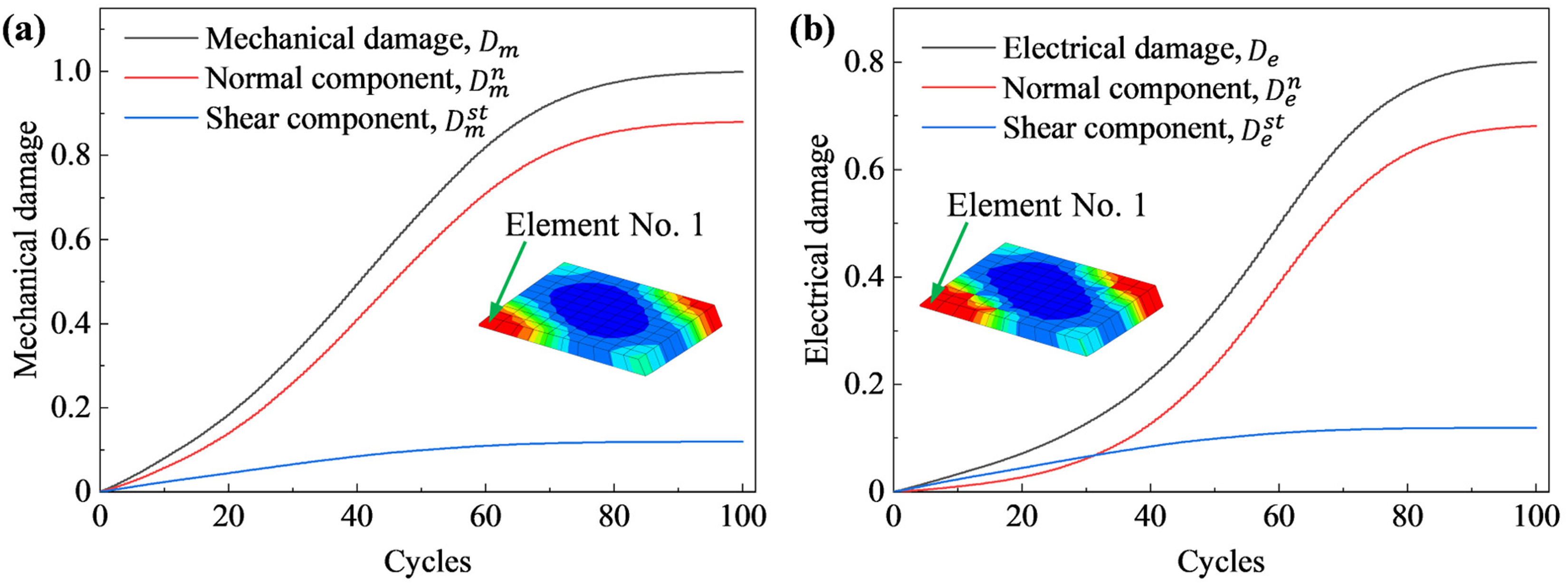
The damage evolution curve of element No. 1 in the hydrogel adhesive layer: (a) mechanical damage and its normal and shear component, (b) electrical damage and its normal and shear component.
Figure 13 presents the simulation results of the current signal drift of patch-type electrodes under various loading cycles. The signal drift of the electrode was characterized by the relative current change,
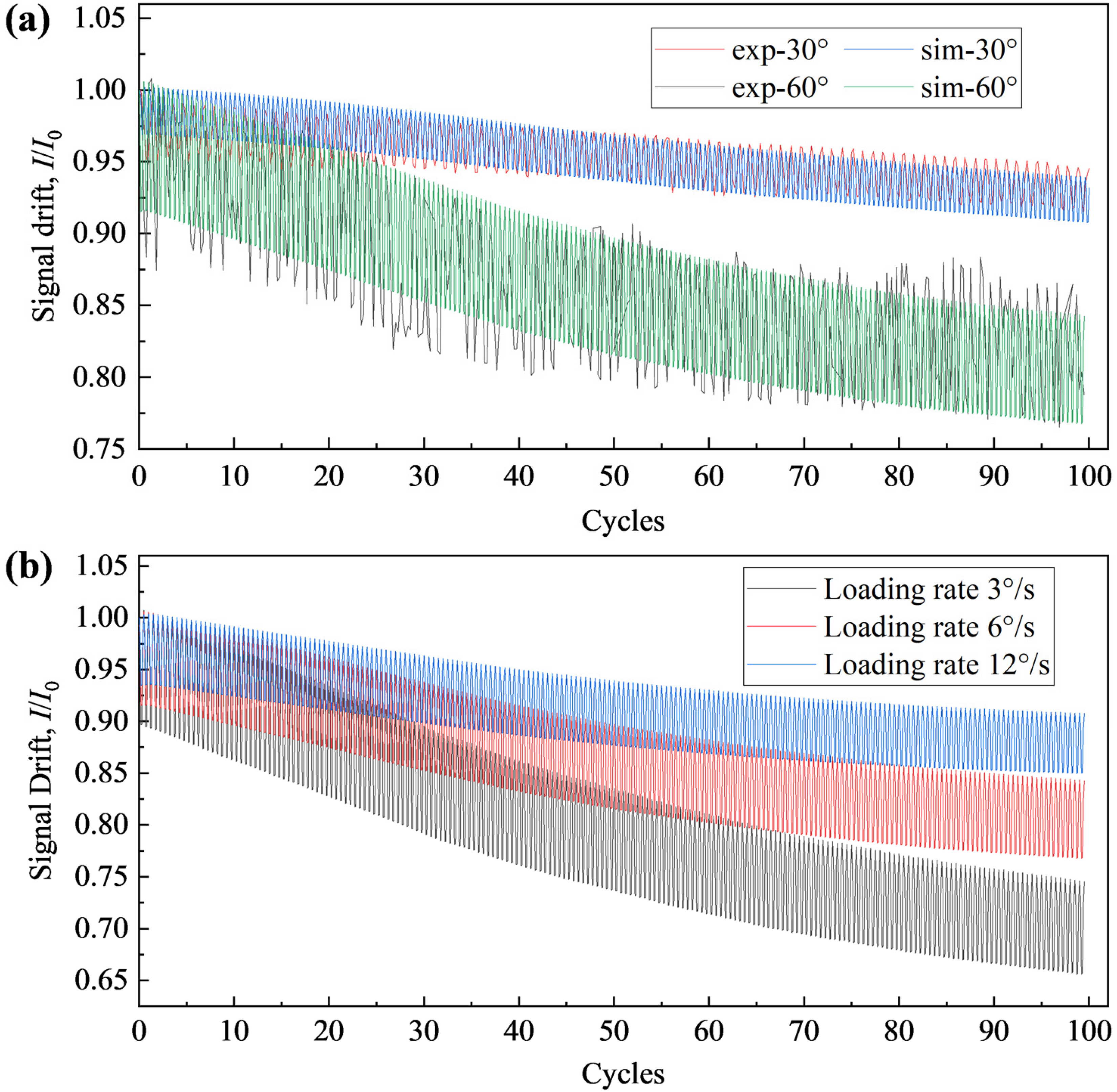
The simulation results of current signal drift in 100 loading cycles with different loading conditions: (a) comparison of simulation results at torsion angle amplitude of −30°∼30° and −60°∼60° with loading rate of 6°/s, and their comparison with experimental results, (b) comparison of simulation results at loading rate of 3°/s, 6°/s and 12°/s with cyclic torsion angle amplitude of −60°∼60°.
Conclusions
This study developed a three-dimensional rate-dependent CZM with electrical damage to describe the damage behavior of hydrogel adhesive interface under cyclic loadings. The validity of the model was verified experimentally, and the results demonstrated the effectiveness of the proposed CZM in characterizing the mechanical and electrical damage behavior of the conductive hydrogel adhesive interface in three-dimensional complex cyclic loading conditions. The main conclusions of this study are summarized as follows:
A three-dimensional rate-dependent CZM was developed as the normal and tangential components of the cohesive element are all defined as viscoelasticity. Thus, the proposed CZM is effectiveness in simulating viscoelastic interface damage behavior in three-dimensional complex loading condition. The relationship between electrical damage and mechanical was constructed in normal tensile and pure shear loading states based on experimental results for the conductive hydrogel adhesive interface. An electrical damage mechanism was implemented in the three-dimensional rate-dependent CZM. It was realized that the CZM can characterize not only the degradation of strength and stiffness but also the deterioration of electrical conductivity of the adhesive interface. The proposed CZM was utilized for predicting the electrical signal drift of sensor electrodes in torsion cycles and the results indicated that the signal drift is more significant in larger loading amplitude and lower loading rate under cyclic loading.
Overall, the extended CZM proposed in this study provides a useful tool for simulation the electrical damage behavior of soft conductive hydrogel adhesive interface in different cyclic loadings with various amplitude and loading rates and predicting the electrical signal drift law of the patch-type health monitoring sensor in long-term working service. In further study, the influence of environmental factors such as temperature or humidity on the mechanical and electrical damage behavior of the interface can also be incorporated in the extended CZM to improve the model's generalization. This will help develop signal drift compensation methods and improve the long-term service reliability of the sensors.
Footnotes
Author contributions
Quan Sun: Conceptualization, Methodology, Data curation, Formal analysis, Investigation, Writing—original draft, and Funding acquisition; Fankai Wei: Data curation, Formal analysis, and Investigation; Pedro Dinis Gaspar: Supervision, Writing—review & editing, and Funding acquisition; Boxin Yang: Software, Validation, and Writing—review & editing; Yebo Lu: Conceptualization, Resources, Supervision, Project administration, and Funding acquisition.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (62374074), Zhejiang Provincial Natural Science Foundation (LJXSQY26E050003), the Science and Technology Bureau Project of Jiaxing (2024AY10094), and the Fundação para a Ciência e Tecnologia (FCT), C-MAST (Centre for Mechanical and Aerospace Science and Technologies), under project UIDB/00151/2020.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.