
Abstract
Self-assembly is a phenomenon broadly observed in nature where a vast number of various molecules spontaneously synthesize complex structures. In this article, prompted by the need for the realization of highly autonomous self-assembly systems that employ magnetism as a driving force, we discuss fundamental issues associated with magnetically driven self-assembly systems. We first introduce some examples from our case studies, in which the models all subscribe to a distributed approach, and thus lack central control. Then we categorize them by their type of magnetic attachment. The issues discussed include several fundamental properties, such as the effect of morphology, stochasticity, the difference between two-dimensional models and three-dimensional models, emergence, allostericity, and parallelism. The conclusions obtained support our stance that the appropriate morphology lightens the control cost for the assembly, providing primal but engaging instances of magnetic self-assembly systems that warrant further study.
1 Introduction
Microbiological discoveries in the last several decades have provided an accurate and enhanced view of nature. An exemplary feature is that the components of the main constituent, such as proteins, spontaneously synthesize within organisms and maintain formed structures through an intricate web of intramolecular interactions. These types of distributed bottom-up processes often enable the subject to attain robust features, such as morphogenesis, self-repair, or metabolism. This fact has inspired engineers to anticipate innovative products, in the form of self-repairable machines, which are efficient at attaining equivalent capabilities.
Half a century ago, even before the realization of the tremendous challenge of constructing self-assembling machines in the 1990s, some pioneering work had already been executed. Efforts were begun to abstract higher level design principles to clarify the actual dynamic processes underlying these interactions. Penrose presented a provoking self-replication model that was mechanically realized (Penrose, 1958, 1959). This work was followed by several studies that focused on elements, such as clustering patterns of passive elements and investigating the role of shape on templates and components (Breivik, 2001; Cohn & Kim, 1991). A simple but elegant design was demonstrated by Hosokawa, Shimoyama, and Miura (1994) in which the components could react to an input and allow new bondings. Notable ideas about conformational switch were proposed by Saitou and colleagues (Saitou, 1999; Saitou & Jakiela, 1995a, 1995b; Saitou, Wang, & Wou, 2000), although their work represented more conceptual demonstrations for theoretical justifications. A series of studies was conducted by Whitesides and colleagues to realize the positional coordinates of molecule-mimetic chemistry (Bowden, Terfort, Carbeck, & Whitesides, 1997; Bowden, Weck, Choi, & Whitesides, 2001; Grzybowski, Winkleman, Wiles, Brumer, & Whitesides, 2003; Wolfe, Snead, Mao, Bowden, & Whitesides, 2003), circuit functionality (Boncheva, Ferrigno, Bruzewicz, & Whitesides, 2003; Boncheva, Gracias, Jacobs, & Whitesides, 2002; Gracias, Tien, Breen, Hsu, & Whitesides, 2000), reversible aggregation (Mao, Thalladi, Wolfe, Whitesides, & Whitesides, 2002), folding structures (Boncheva et al., 2005), the rotation of magnets (Grzybowski, Stone, & Whitesides, 2000), and the rotation of rotors (Grzybowski, Radkowski, Campbell, Lee, & Whitesides, 2004). Similarly, numerous research efforts have been devoted to the investigation of morphology (Stambaugh, Lathrop, Ott, & Losert, 2003). Artificial chemicals that can form in several ways depending on the temperature of the system, such as polymers and dimers, were demonstrated by Breivik (2001). Different aggregation patterns with various sizes of components were shown by Yamaki, Higo, and Nagayama (1995). An intelligent self-assembling block that can represent multiple states by the units’ rotational angle was designed by Tsutsumi and Murata (2007). The system can physically conduct XOR calculation on a two-dimensional plane. These self-assembly blocks can be categorized into two types: those that are passive and those that have states that regulate their bindings. All these models are simple enough to be scaled down (realized on the physical level). Yet few of the models attained “functionality” of the compound, such as in an electric circuit. Also, these models presumed environmental turbulence as the driving force of the reactions (not self-propulsion), which is a reasonable premise when the module size is small enough.
Another trend was adopted from robotics. These modules are settled on a ground with low friction and agitated to achieve locomotion. The method of agitation varied: the use of an air-table with mechanical turbulence (White, Kopanski, & Lipson, 2004), air-jet turbulence (Bishop et al., 2005; Griffith, Goldwater, & Jacobson, 2005; Klavins, 2007), or fluid turbulence (Tolley & Lipson, 2010; White, Zykov, Bongard, & Lipson, 2005). Some have a unique characteristic, such as morph by disassembly (Gilpin, Knaian, & Rus, 2010). Yokoi, Nagai, Ishida, Fujii, and Iida (2003) adopted robotic and chemical approaches in which they developed a physically connected multi-robot system and a system that could control a drop of mercury. A good review article surveying this field was published by Gross and Dorigo (2008).
To our knowledge, few artificial self-assembly systems with millimeter to centimeter scales have attained spontaneous aggregation with intrinsic driving mechanisms. In other words, existing approaches require accompanied driving force for interactions such as air flow or fluid flow, in addition to magnets for docking mechanisms. Despite the ubiquitous nature of the force exertion and the ideal scalability of magnetism, few successful attempts have been made to employ magnetism in the context of artificial self-assembly. In this article, motivated by the potential of magnetism in driving mechanisms of artificial self-assembly systems, we summarize our exploratory study that included a series of experiments and provide an integrated view of design issues related to the magnet-based self-assembly systems. We further survey relevant issues and discuss them based on the results obtained. The article is organized as follows. In Section 2 we describe the experimental setup. In Section 3 we present various experimental results by classifying them into several groups according to the assembly patterns. This is followed by a discussion in Section 4 in which we raise and summarize relevant issues discovered through the process. Finally, Section 5 concludes the article.
2 Experimental setup
The term self-assembly implies a notion in which components rove around the environment and spontaneously compose structures. The processes are normally realized in a distributed and stochastic manner, that is, once a set of experimental conditions is invoked, components act in parallel, intrinsically following local causal rules imposed by the system. Inspired by various instances that demonstrate self-assembly in nature, we have constructed an experimental platform to analytically investigate the properties of self-assembly (Miyashita, Casanova, Lungarella, & Pfeifer, 2008; Miyashita, Göldi, & Pfeifer, 2011).
The platform was simple, but sufficient to study the relation of magnetism, morphology, dynamics, and the product yield of a system. The main attributes of the platform are: magnetic interaction driven stochastic, distributed, and scalable (Miyashita et al., 2011). The experimental apparatus consisted of centimeter-sized floating modules, a water container, a pantograph mechanism, and a power supply. We prepared three types of modules: passive, self-agitative, and manually fixed position (Figure 1: i, ii, and iii respectively). All types had a single permanent magnet at the bottom for attaining attractive/repulsive interactions. The magnets were attached either horizontally or vertically, depending on the experiment (Figure 1, left-bottom illustration). Passive elements had no motors; they were simply floating tiles with an attached magnet. A self-agitative module and a manually handled module featured flat coreless vibration motors (T.P.C FM34F,
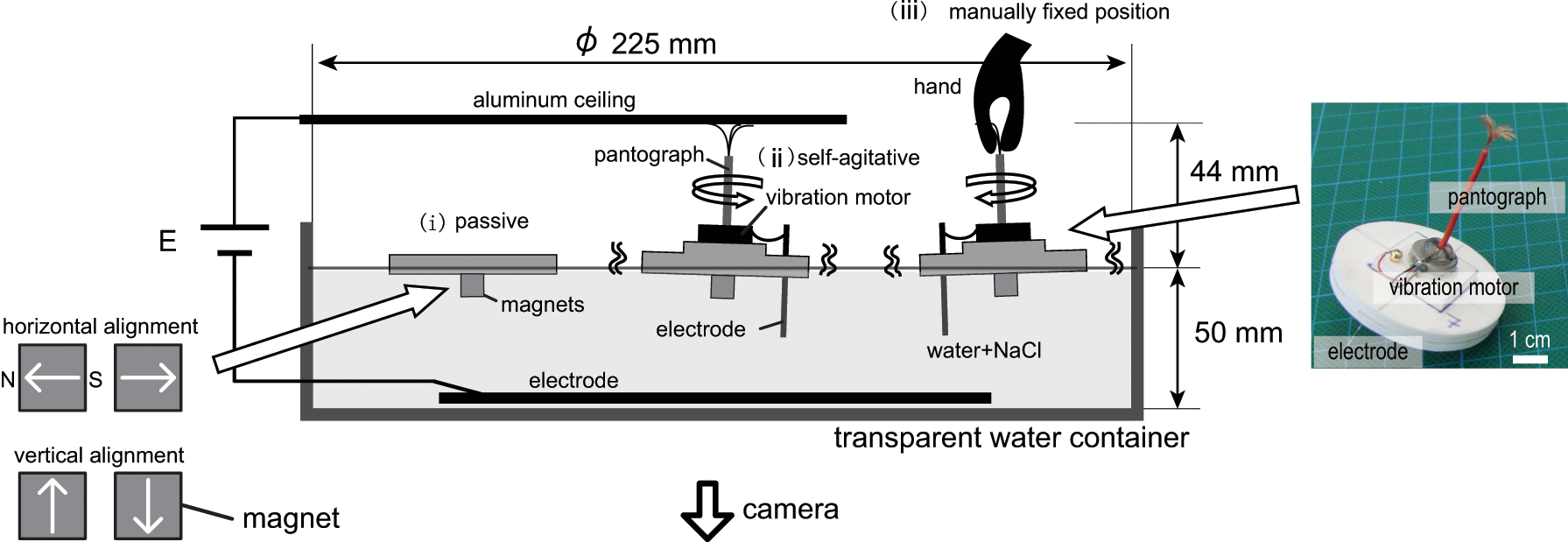
General experimental setup. Three modules from left to right: passive, self-agitative, and manually constraint. Self-agitative module weighs
Given


where
The magnetic field created by

Utilizing

In general, magnetic force decays in inverse proportion to distance to the power of four (
3 Classification of assembly patterns
In this section, we present the assembly patterns formed by differently shaped modules. The observed behaviors are shown in Figures 2 and 3, in which the magnets are horizontally attached (in Figure 2), or vertically attached (in Figure 3). Some are powered via the ceiling plate (Figure 2b, c, and d, and Figure 3g), while the others are powered through a wire being sustained by hand (Figure 3h and i), passive but externally agitated (Figure 3f), or pure passive (Figure 2a, Figure 3j and k). Note that these self-assembly processes occur without any centralized controls. We set the following categorization for the displayed outcomes: outcomes that are physically demonstrated within a set of conditions (Figure 3h and i), outcomes that are tested in experiments (Figure 2a to e, and Figure 3g), outcomes that are surveyed within a statistical study (Lattice, Figure 3f; Mobility, Figure 3g; and Logical reactions, Figure 3j and k). All the results are confirmed based on these criteria.
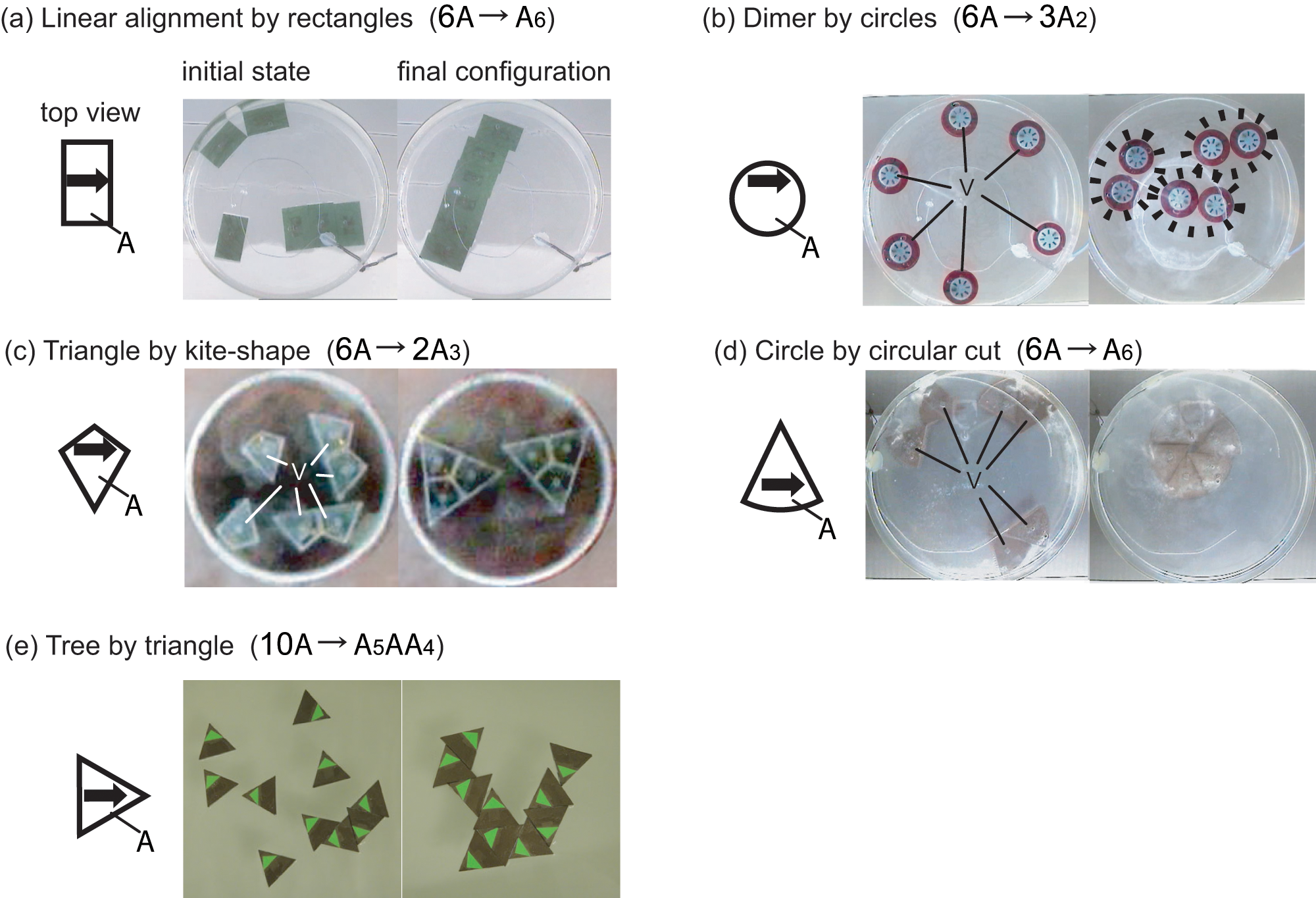
The assembly patterns of different modules that are equipped with horizontally aligned magnets: (a) linear alignment, (b–d) clustering and (e) tree. The modules containing vibration motors are indicated with the letter “V”. The arrows in each illustration represent the way in which the magnets are attached. Each reaction is described with a chemical formula. Note that the same
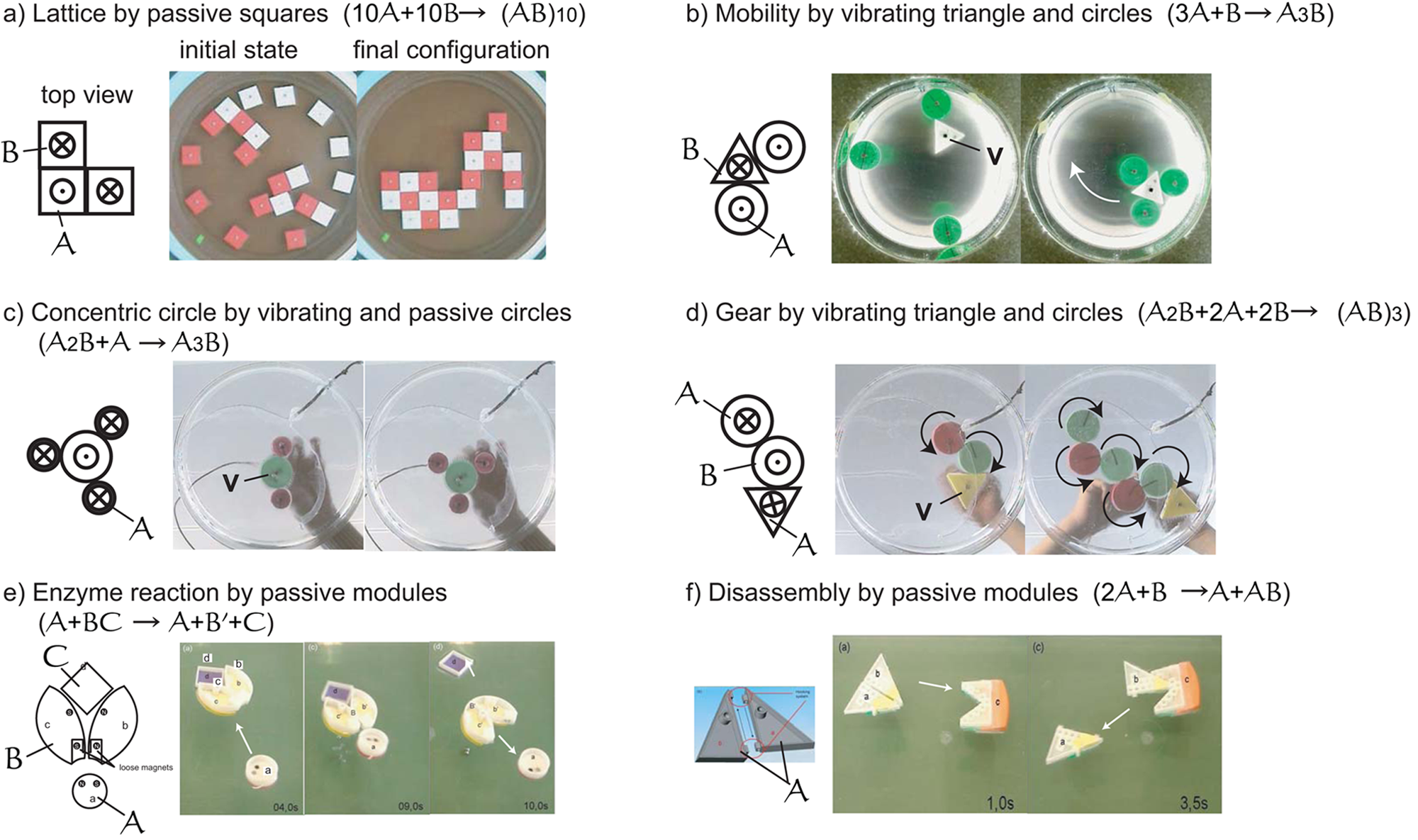
The assembly patterns of modules with vertically aligned magnets. The modules containing vibration motors are indicated by the letter “V.” (a) Lattice by passive squares, (b) mobility by vibrating triangle and circles (Miyashita, 2011), (c) concentric circle by vibrating and passive circles, (d) gear by vibrating triangle and circles, (e) logical enzyme reaction, (f) disassembly by passive third module. Each reaction is described with a chemical formula. Figure (a) reproduced with kind permission from the MDPI (Miyashita, Nagy, et al. 2009). Figures (c) and (d) reproduced with kind permission from Springer (Miyashita, Lungarella, et al., 2009). Figures (e) and (f) reproduced with kind permission from Christof Audretsch (Audretsch, 2009).
3.1 Horizontal magnetic alignment
In Figure 2, five aggregation patterns are presented in which the magnets are horizontally attached to the modules (see Figure 1). The initial and the final configurations are presented, respectively, next to the modules’ schematic illustrations with their magnets’ attachments.
We classified the observed assembly patterns into two groups: namely, Linear alignment, Clustering, and Tree, according to the topology created. The representative states of modules and clusters can be described with chemical symbols, such as
Linear alignment ( –
Clustering ( – – –
Tree ( –
The system shows the characteristics of monopoles due to the arrangement of the magnets.
3.2 Vertical magnetic alignment
Figure 3 shows six assembly patterns that are obtained by attaching the magnet vertically to the modules’ bottom surface.
In each example, a schematic is presented with the orientation of the magnets’ attachment, and the initial and final configurations with snapshots. The assembly patterns are classified into two folds: alternate positioning and logical reaction.
Alternate positioning ( – – – –
Logical reaction ( – –
These assemblies show the characteristics of dipoles, and the representative assembly patterns are alternate positioning.
3.3 Properties
Table 1 lists the properties attributed to the particular configurations shown in Figures 2 and 3, respectively.
The distribution of the norms of magnetic flux density (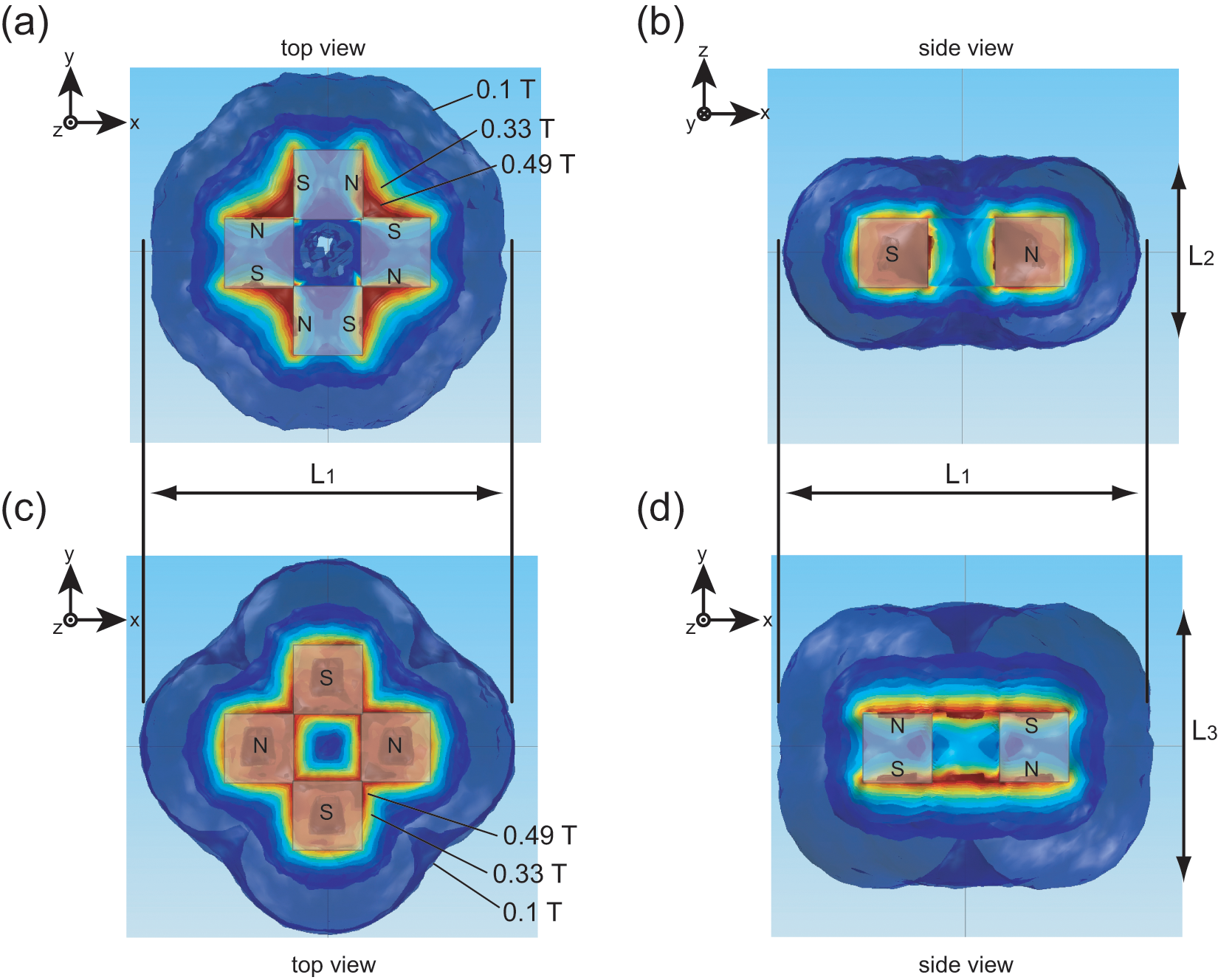
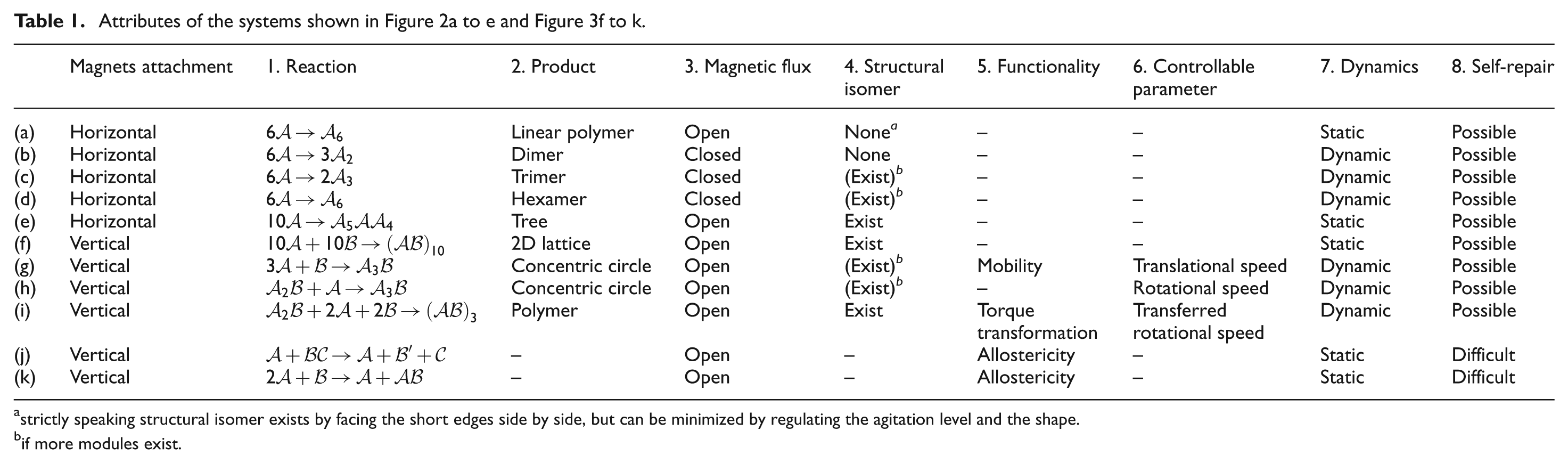
strictly speaking structural isomer exists by facing the short edges side by side, but can be minimized by regulating the agitation level and the shape.
if more modules exist.
Table 2 summarizes the features of horizontal and vertical magnetic attachments. Horizontal alignment is suitable when employing controllable torque in the system. However this implies that, due to the strong magnetic torque causing an instant rotation of modules, repulsion can only be introduced by environmental turbulence; it is difficult to do by magnetism. Hence, regardless of the module’s shape, the system shows aspects of a homogeneous system in its assembly. In contrast, vertical alignment can be treated as a monopole model. This lightens the burden of designing the system. However, this also acts as a disadvantage because the system cannot exploit strong torque when necessary. Moreover, it is difficult to close the flux, which means halting the assembly requires a specific treatment.
Pros and cons for horizontal/vertical alignment.
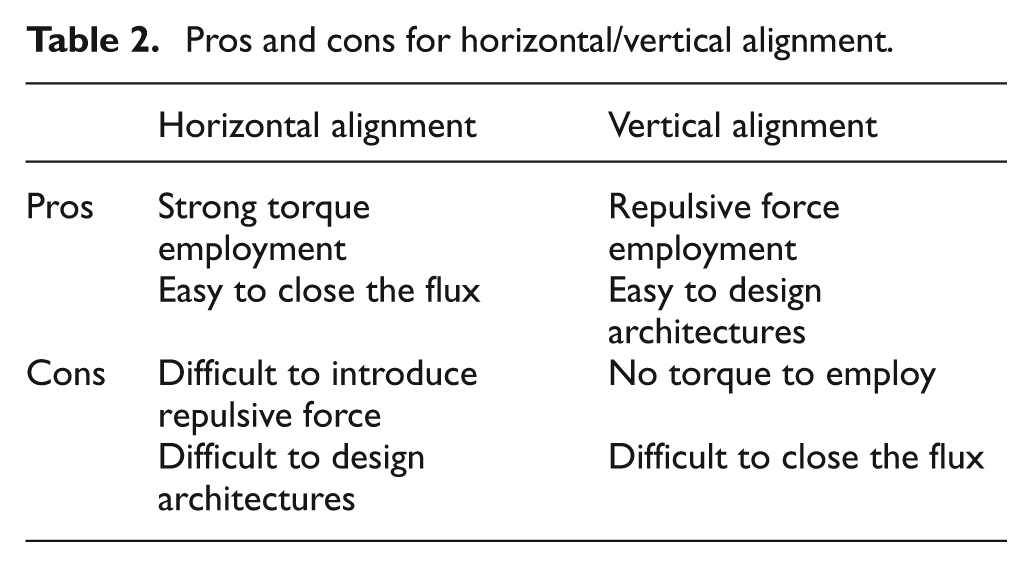
The characteristic of vertical attachment is that repulsion and attraction can naturally co-exist in the system. Hence this type of magnet’s arrangement is appropriate for complex models, such as in Figure3j and k. It has to be added that geomagnetism affects horizontal alignment on their orientations.
4 Discussions
In this section, we discuss subjects attributed to self-assembly systems that specifically employ magnetism as the main driving force for the assembly from three perspectives; namely (1) shape, (2) assembly issue, and (3) environmental issue (Figure 5).
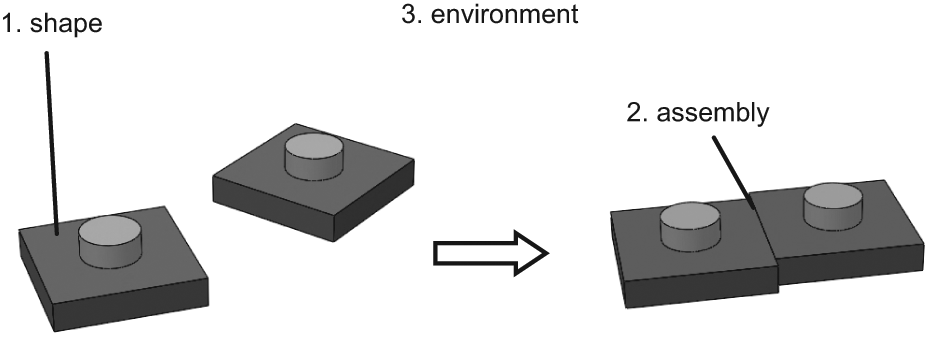
Three perspectives on a magnet-driven self-assembly system.
4.1 Shape
In nature, morphology plays a crucial role in self-assembly systems. The presented demonstrations imply that an essential role is often played by the distribution of the body parts from the “origin of the force” (i.e., the magnets) rather than the overall geometry. A practical approach is to evaluate shape from an energetic perspective, and develop a scheme to ground the phenomenon in the context of physics.
4.1.1 Horizontal alignment
Modules having convex shapes can uniquely be described as a function of two variables: the distance from the origin of the force to the edge (
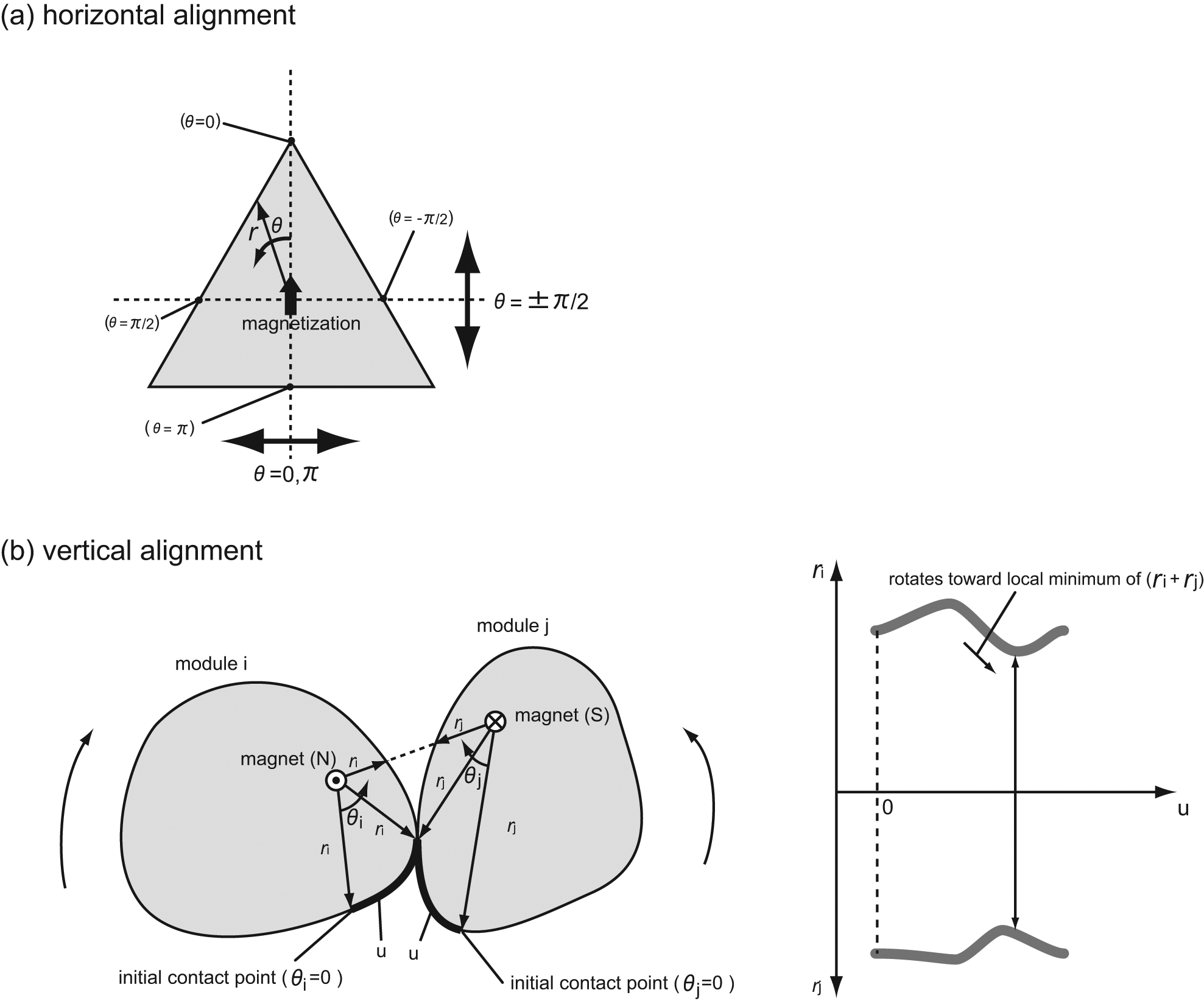
Evaluation of the shapes of modules with (a) a horizontally attached magnet and (b) a vertically attached magnet.
4.1.2 Vertical alignment
Figure 6b describes the geometry of two modules with vertically attached magnets in which two components change relative angles (
Take the lattice assembly in Figure 3a as an example: The stability of the formed structures was intrinsically determined by the shape of the constitutive tiles. Rounded tiles induced a folding motion, which was hardly observed in sharp-cornered tiles, enabling the clusters to smoothly converge to further stable states. It is also worth mentioning that bonding strength between modules is commonly reinforced by the component’s morphology. Desired bondings make use of shape matching in addition to magnetic pole matching to restrict the bonding condition.
The initial contact positions of two modules can be directed by making one module possess two magnets: one pointing up and one pointing down. In this manner, the counterpart module receives a biased field such that it becomes attracted to the corresponding magnetic side. This indicates the possibility that some guiding mechanisms for an aggregation can be further integrated as morphological properties.
4.2 Assembly
4.2.1 Emergence and allostericity
As can be seen in the bike-like configuration in Figure 3g, where a combination of three circular modules and a triangular module yields functional mobility, combinations of basic components often exhibit meaningful behavior.
Suppose there are two different modules/clusters:

A state change can be any conformational/internal change inducing the acquisition of another functionality of the module, for example, conformation change of a protein, protruding a sticking site (charged site) out of the body such that it can react with another protein. In distributed systems, this sort of acquisition of functionality is normally accompanied by combining to another module, and can be described as

which we termed allosteric plus and allosteric minus, respectively. In the allosteric plus reaction, a component connects to another component and eventually obtains a different characteristic. Such an acquisition of functionality spontaneously leads to the next reaction. Note that the reaction order can be sorted through this process, and this is the only way to sort the aggregation sequence in assembly processes. In the allosteric minus reaction, which is the opposite case, a cluster disassembles a part of itself and obtains a different characteristic. In this way, all the reaction processes in a system can be described algebraically, employing causal analysis. In the case of crystal formation in snow flakes, the atoms change their conformation and allow the next atom to attach.
In artificial self-assembly systems utilizing magnets, however, as we saw in Figure 3j and k, having elaborated internal states that enable the component to physically express a/various state(s) is a trade-off in two ways: it leads to vulnerability against environmental turbulence, and it induces overweight of components and hinders rapid motions and structural stability. The benefit of having different types of components compensates for such problems, and eventually guarantees the diversity of reactions, while maintaining the complexity of the causal rule. In other words, fertility in heterogeneity lightens the mechanical load of the components. Finding a suitable level of heterogeneity must become one of the capital issues in artificial self-assembly systems.
Obtaining a functionality as an allosteric effect can be achieved as a combination of a simple set of components, of which we see an example in Figure 2f. As the attractive region for the external tiles depends on the configuration of the constitutive tiles, the system differentiates its characteristics through the structure’s morphology. The difference between functionality and allostericity is that while the former mainly exerts influence to the system in an analogue manner, the latter operates in a digital way, and its features are mostly distinctive. In addition, an allosteric component is not only capable of playing roles of two different types of components, but also generates various temporal causalities. Heterogeneous systems, which consist of many different types of components, on the other hand, often encounter divergence of the components’ combinatorial problems, in which enrolled components regularly yield undesired compounds due to the lack of a reaction’s temporal constraint. In this regard, parallelism is another keyword that describes the characteristics of stochastic self-assembly.
4.2.2 Parallelism
Unlike conventional multi-tasking assembly systems, self-assembly systems deal with multi-degree parallelism in their assembly processes. Parallelism occurs not only in the spatial dynamics, but also along a temporal dimension, where the progress of different stages of reactions can be observed simultaneously. As we established in one of the prerequisites in the logical model shown in Figure 2j and k, most of our systems suppose magnetic attractions between desired attachments and either repulsions or no relation between undesired attachments. This postulate prevents the system from further extension in the diversity of the type of components, and hence, in the complexity of reaction paths. In this respect, template plays a role of not only spatially sorting the dynamics but also temporarily coordinating the assembly.
As for a solution for quantitative measure, we previously proposed a measuring method of degree of parallelism (

The

which takes various values between
4.3 Environment
4.3.1 Stochasticity
Our system exploits magnetic attraction as a long-range interactive force. Boncheva and Whitesides (2005) pointed out the rare uses of magnetism in biology for self-assembly, although the solutions derived in nature may not be optimal when using nonbiological components. In molecular assembly, three conditions are known to be necessary: weak interaction, thermal agitation, and nucleation. The mechanism behind molecular assembly is numerous trial and error iterations of the connections until the connection strength reaches a sustainable level, which is beyond the pressure of proofreading through environmental turbulence. It utilizes environmental diffusion as a traveling aid and achieves highly efficient assembly matching per unit time. Through such a process, the system gradually shifts to a more energetically stable state. This is one of the fundamental differences from pick-and-place style (deterministic) assembly in engineering.
As for a quantitative measure representing a timescale dependency, the Reynolds number

where
In contrast, objects larger than
At the molecular level, if the system has a constant temperature and a pressure, Gibbs free energy defines the change of free energy (

where
4.3.2 Two-Dimensional Versus Three-Dimensional Models
It is suggested that self-assembly is the only practical way to manipulate and order nanometer and micrometer-sized components into three-dimensional structures (Boncheva & Whitesides, 2005). As introduced in Section 1, many studies have carried out assembly processes on two-dimensional platforms (Pawashe, Floyd, & Sitti, 2009). The distinction between a two-dimensional model and a three-dimensional model is not as trivial as it may seem at first glance. Normally a component has six degrees of freedom (DOF;


The 2DI allows a component to rotate in three dimensions on a two-dimensional plane, while 2DII does not (the movement of components is restricted to a two-dimensional plane).
Table 3 summarizes the differences between two dimensions and three dimensions in self-assembly.
The difference between two dimensions and three dimensions in “three-dimensional” world

In general, if the aim is to construct three-dimensional structures, 2DI may provide a sufficient solution, whereas if the aim is to cover the space, the system needs to be extended to three dimensions.
5 Conclusion
This study discusses various features attributed to magnetic two-dimensional self-assembling systems, aiming to highlight the design principles of highly autonomous self-assembly systems that are applicable to different scales. We first elucidated that the form of magnet alignment characterizes the assembly patterns. For instance, when magnets are attached horizontally to each module, the module shows aspects of a dipole. On the other hand, if magnets are attached vertically, each module behaves as a monopole. We further examined the attributes from different perspectives: reaction, product, magnetic flux, structural isomer, functionality, controllable parameter, dynamics, and self-repair. Through case studies, the elucidated features gave rise to unique insights into the interdependencies between the components’ morphologies, the systems’ stochasticity, and the complexity of the assembly paths, which, we believe, deepens the understanding of self-assembly systems.
Footnotes
Notes
This work was partially supported by a Swiss National Science Foundation Fellowship (grant number PBZHP2-133472).