
Abstract
Weakly electric fish use self-generated electric fields to identify prey, explore their surroundings, and communicate with conspecifics. They have electroreceptors over their entire skin surfaces, and readings from these electroreceptors form electric images. The characteristics of electric images include important information such as the locations, shapes, and electrical properties of target objects. The lateral distance to a target object can be estimated using the rate between maximal slope and maximal amplitude, or relative slope, and provides a direct cue to localize target objects, irrespective of size and electrical properties. Sensor readings acquired from distributions of electroreceptors are interpreted as spatial electric images. Temporal electric images can be assessed using a single electroreceptor by back-and-forth swimming. Some species of weakly electric fish engage in back-and-forth swimming behavior during foraging and can use spatiotemporal information to localize objects. With active body movement and forward swimming, a single electroreceptor can scan the time course of potential perturbation caused by a target object. If there is more than one target object, electric images may be distorted by interactions between individual images. In this paper, we suggest that temporal relative slope is an effective measure for the electrolocation of multiple objects by robotic systems. We investigate the characteristics of temporal relative slopes based on back-and-forth sweeping motions to localize multiple spherical objects via modeling experiments. This method can be applied to biomimetic robotic systems in the underwater environment.
Keywords
1 Introduction
Weakly electric fish are specialized for electroreception. Many marine organisms can detect electric fields in underwater environments. Elasmobranchs have numerous ampullary electroreceptors that can detect bio-electric fields generated by other animals but lack electric organs (EO) (Kim, 2007). However, weakly electric fish have EO and use their own electric fields to identify target objects, explore their surroundings, and navigate in space (Lissmann, 1958). The electric fields are emitted in every direction, and their electrosensory systems have omnidirectional views. Electroreceptors distributed on fish bodies sense distortions of self-generated electric fields, and the sensor readings acquired from electroreceptors help to identify target objects.
The electrosensory systems of weakly electric fish have two main components, the EO and electroreceptors. The EO is organized from nerve and muscle cells, and is composed of electrolytes (Kramer, 1996, 1999). Weakly electric fish produce multipolar or bipolar discharges. Weakly electric fish have two types of electroreceptors, tuberous and ampullary (Kramer, 1996; Nelson & MacIver, 1999; Nelson, MacIver, & Coombs, 2000). These electroreceptors respond to external stimuli and changes of electric potential, and deliver sensor readings to the brain. Ampullary electroreceptors are found in elasmobranchs such as sharks, rays, and skates. These receptors are sensitive to external changes of the electric field and are used for passive electrolocation, which does not require an emitting energy source. Ampullary electroreceptors are specialized for sensing low frequency bio-electric signals. In contrast, teleosts (mormyrids and gymnotiforms) have tuberous electroreceptors that are sensitive to high-frequency electric signals (Kalmijn, 1988; Kramer, 1996; Zakon, 1986). Tuberous electrosensory systems are used for active electrolocation, which includes control of self-generated carriers such as electric discharges (Sim & Kim, 2011b). Caputi (2004) showed that weakly electric fish have a variety of response patterns depending on EO discharges (EODs).
The sensor readings of numerous electroreceptors can be represented as stimulus images, or electric images. Tuberous electroreceptors can detect disturbances of self-generated electric fields, and the features of electric images provide information about target objects and surroundings. Electric images represent local changes of potential perturbation at the electroreceptors (von der Emde, 2006). When a target object is near a weakly electric fish, the resulting electric image forms a bell-shaped curve along the rostrocaudal axis. The electric image is affected by the size, shape, electrical properties, and location of the object. There is no one-to-one mapping between image features and object characteristics. It is difficult to extract information about object characteristics, but weakly electric fish can identify targets in complex electrosensory scenes.
Such electrosensing may have potential for use in engineering applications in underwater environments in the absence of visual information. Recent robotic design studies have been inspired by weakly electric fish (Baffet, Boyer, & Gossiaux, 2009; Solberg, Lynch, & MacIver, 2007). One of the most challenging research subjects is the electrolocation of target objects by weakly electric fish in underwater environments. In this paper, we focus on the mechanisms of electrolocation.
In an electric image, the peak location indicates the rostrocaudal position of a target object (Rasnow, 1996). To estimate distances to objects, the ratio of maximum slope to maximum amplitude and the full width at half maximum in the electric image have both been explored as possible mechanisms (Chen, House, Krahe, & Nelson, 2005; von der Emde, Schwarz, Gomez, Budelli, & Grant, 1998). The first measure, or the slope-to-amplitude ratio, can be defined as the relative slope. The second measure can be defined as the relative width. In another approach, we can consider the relative slope and relative width as the maximum slope and maximum width, respectively, of the electric image obtained after normalizing its amplitude.
Object size and shape can be identified by the relative width, peak amplitude, and phase shift of the electric image (Rasnow, 1996). The rostrocaudal position (head to tail) and lateral distance (midline to side) of the fish must be estimated to localize a target object. The electric perturbation caused by a target object depends on the distance between the object and the electroreceptor. Therefore, sensor readings at the electroreceptor closest to the object show maximum electric perturbation, and the position of the electroreceptor along the rostrocaudal axis corresponds to the position of a target. In contrast, the lateral distance cannot be directly measured using any single feature of the electric image. Electric perturbation is affected by many characteristics, and it is necessary to consider both the intensity and shape of the electric image curve to estimate distance.
Weakly electric fish can be classified by EOD characteristics into two types: pulse-type and wave-type EOD fish. Distance estimation depends on EOD type. Rasnow (1996) found that gymnotiforms belonging to wave-type EOD species probably use relative width to measure distances to target objects. Relative width at half or 90% of maximum amplitude of the electric image is independent of other characteristics such as size and conductivity of the object. Use of the relative width at half maximum of an electric image was also tested by Chen, House, Krahe, & Nelson (2005) using a moving object. It is possible to assess differences between rostral and caudal peak locations in bimodal electric images to estimate distance (Babineau, Longtin, & Lewis, 2006). The relative slope, or the slope-to-amplitude rate, has been used as a distance measure in pulse-type EOD species (von der Emde, 1999, 2006; von der Emde, Schwarz, Gomez, Budelli, & Grant, 1998). Mormyrid fish can discriminate distances to objects, and the maximum slope-to-amplitude ratio can be used to measure the distance to a target object (von der Emde, 1999; von der Emde et al., 1998). Sicardi, Caputi, & Budelli (2000) referred to the ratio of maximumslope to maximum amplitude as the relative slope, and verified the effectiveness of relative slope for distance estimation through simulations.
In this study, we use an electric field model of a gymnotiform fish that produces wave-type EODs. Active sensing enhances sensory image information due to self-generated movements such as tail bending and back-and-forth swimming. The temporal patterns of electric images generated during tail bending may provide cues for determining object distances (Sim & Kim, 2011a). In addition, back-and-forth swimming or scanning motions may also generate electrolocation cues (Nelson & MacIver, 2006). It is possible to apply the relative slope to the gymnotiform electric field model in analytical simulations (Sim & Kim, 2010). Apteronotus albifrons or the black knife ghostfish, a member of the Gymnotiformes, uses back-and-forth swimming behaviors during foraging (Lannoo & Lannoo, 1993) and other wave-type EOD species show similar foraging behaviors (Bacher, 1983; MacIver, 2001; Nanjappa, Brand, & Lannoo, 2000). In this study, we identify the spatiotemporal information necessary to estimate to distances to multiple objects during back-and-forth swimming.
Babineau, Lewis, & Longtin (2007) showed the effects of intervals between multiple target objects. They defined the associated inter-object distance as a measure of spatial acuity. The smallest distance between a pair of objects can be identified, and spatial acuity depends on the size, conductivity, and lateral distance to objects. When there is more than one target object, electric images are distorted by interactions of the electric images from each object. However, there have been no studies regarding the estimation of distances to multiple target objects.
In this paper, we address the practice of electrolocation using spatiotemporal information to discriminate multiple target objects in the near-field and its potential applications in biomimetic robotic applications. We use a model of electric field perturbation to show the temporal patterns of electric images and assess whether distance estimation or relative slope works for multiple target objects in both spatial and temporal domains. Active sensing based on forward swimming can lead to a new measure of temporal relative slope for a single electroreceptor, and we investigate whether this measure is effective in environments with multiple target objects. We introduce our distance estimation method based on active sensing, or temporal information processing with active body movement, and conduct simulations with two objects in a variety of experimental settings to determine the advantages and limitations of the suggested approach, which can be used for biomimetic robotic applications in underwater environments.
2 Methods
We model the electroreception process of A. albifrons and simulate a set of electrosensor readings on the skin surface using MATLAB version R2009b (The MathWorks, Inc., Natick, MA, USA). We assess the electrolocation of multiple objects based on relative slope. We initially collect temporal electric images while an electric fish model swims forward, and calculate the slope-to-amplitude ratio over the images. We position two spherical objects serially along the rostrocaudal axis of the fish body. We perform simulations using either pairs of the same-sized spheres, or large and small spheres, at the same distance and then at different distances to investigate temporal information processing.
2.1 Electric field model
The electric fields of gymnotiform fish were mathematically derived (Rasnow, 1996). EOs can be modeled as collections of electric poles, and it is possible to evaluate the electric perturbation of a simple sphere using the size, conductivity, and distance between the object center and a measurement point, and to calculate the electric field vector at the object position (Chen et al., 2005; Rasnow, 1996). An EO may be composed of many electric poles and the electric potential is given as the sum of the potential induced by each electric pole (Chen et al., 2005; Rasnow, 1996). These electric poles are arranged along the mid-line of the fish at uniform intervals of 0.1 cm (Chen et al., 2005; Sim & Kim, 2011b). The electric potential at the point

where m is the number of positive electric poles,
The electric field at

In this study, the normal component of the electric field to the sensory plane is considered and the transdermal potential difference

where
The derivation of the electric perturbation of a simple spherical object has been shown previously (Chen et al., 2005; Rasnow, 1996). When a target object is near the fish, the electric perturbation

where

The sensor readings of the electric perturbation in equation (5) can form an electric image.
2.2 Electric images
In this paper, we consider a one-dimensional electric image along the rostrocaudal sensory line. Two-dimensional electric images in the rostrocaudal vs. dorsoventral plane can be extended easily from the one-dimensional electric image. Another electric image can be obtained using sensor readings obtained from one electroreceptor along the temporal axis during back-and-forth sweeping motions. Thus, electric images can be represented as both temporal electric images and spatial electric images.
Electric perturbations along the rostrocaudal sensory line correspond to the spatial structure of the electric image. Similarly, we can define the temporal structure of the electric image. We consider two types of temporal electric images generated by one electroreceptor when a weakly electric fish swims forward or backward. The temporal electric image corresponding to backward swimming mirrors the image corresponding to forward swimming.
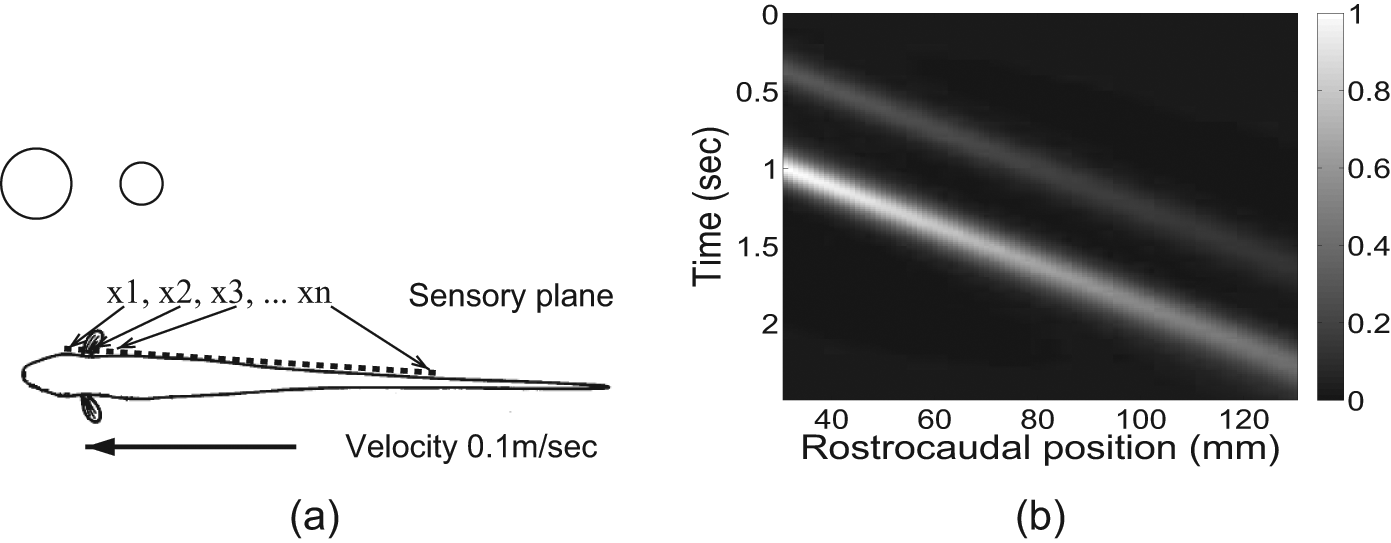
Figure 1 shows the spatiotemporal electric image generated for a one-dimensional sensory line when a weakly electric fish swims forward and passes by a target object. The brighter area of the electric image indicates the greater electric perturbation generated by the object. The spatial electric image drawn along the x-axis (the space domain) and the temporal electric image drawn along the y-axis (the time domain) can be used for electrolocation. The relative slope is a distance measure (Sicardi et al., 2000; von der Emde et al., 1998; von der Emde, 1999) and we use two types of relative slopes, spatial and temporal relative slope in the spatiotemporal domain, which can be calculated as follows


where n is the number of electroreceptors distributed along the sensory line and
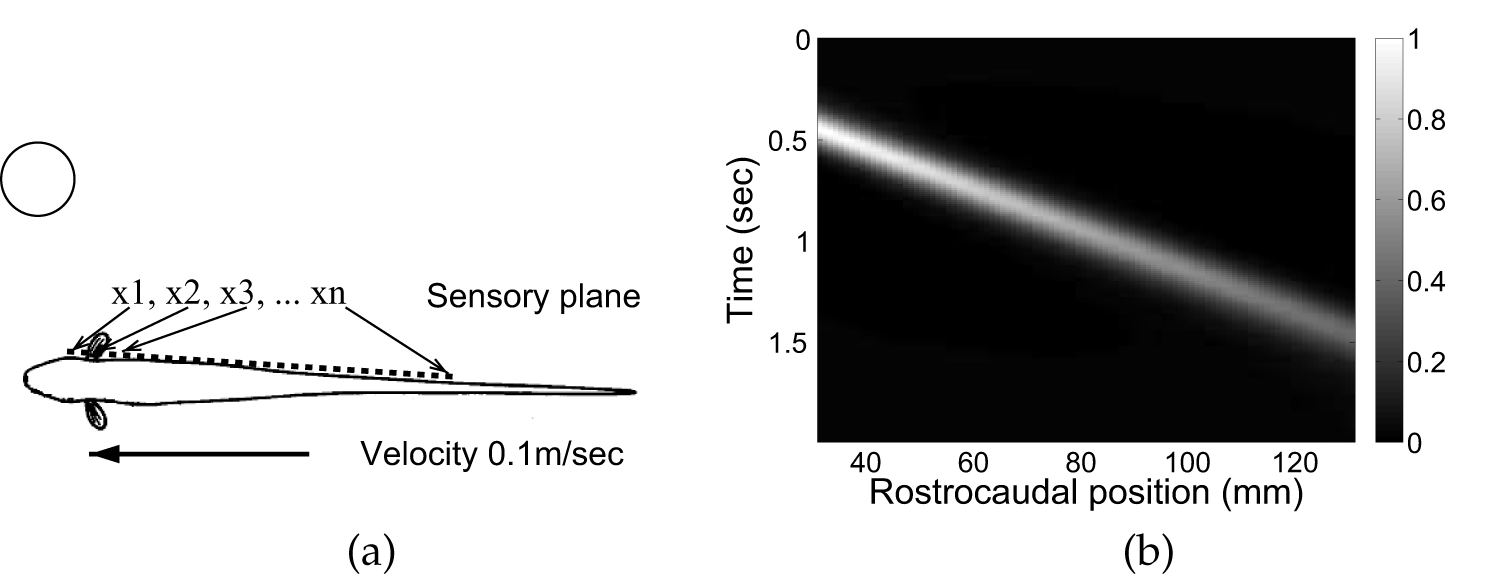
Spatiotemporal electric image. (a) Diagram of sensors and a target object. (b) Spatiotemporal pattern when a weakly electric fish swims forward; the velocity of the fish is 0.1 m/s (the maximum intensity is normalized to 1).
Two different circumstances for the spatial and temporal electric images are shown in Figure 2. Figure 3 shows electric images obtained from both cases. The first column of Figure 3 shows spatial electric images and the other column represents temporal electric images generated during forward swimming. The peak amplitude is reached when an electroreceptor is at the minimum distance for a given target object. The perturbation amplitude is proportional to the size and the conductivity of a target object – see equation (5). If the fish swims backward, the electrosensory system produces a mirror image of the temporal electric image.
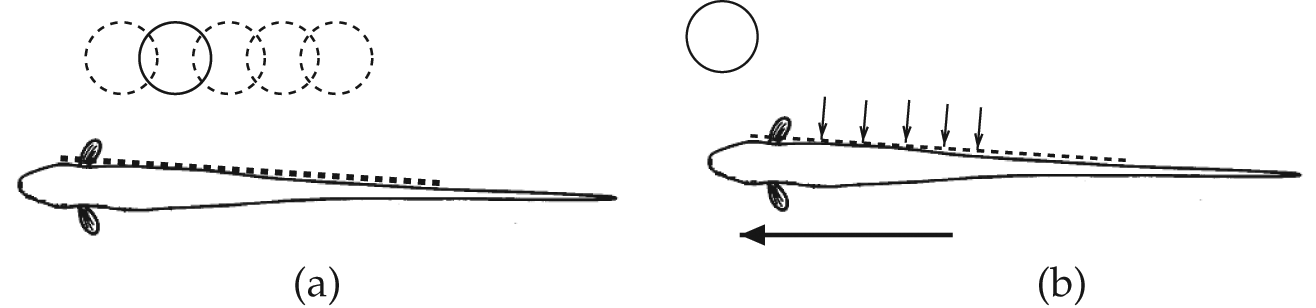
Diagram of a fish and a target object. (a) Arrangement of the spatial electric image along the rostrocaudal sensory line when the rostrocaudal position of a target object changes and the fish remains static. (b) Arrangement of the temporal electric images of five electroreceptors (indicated by arrows) when the fish swims forward, passing by a static object; the velocity of the fish is 0.1 m/s.
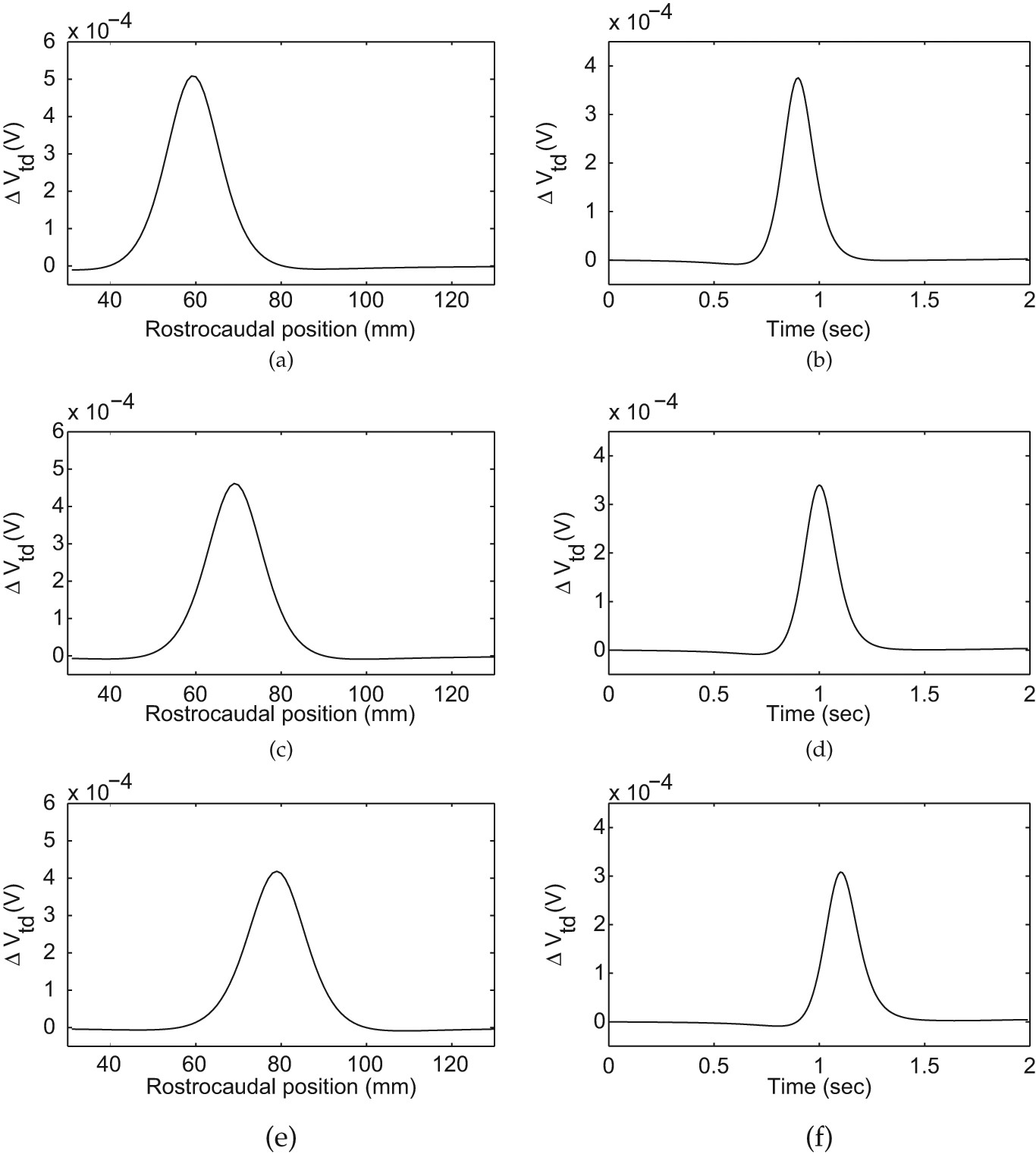
Spatial electric images and temporal electric images; (a), (c), (e) indicate spatial electric images when the rostrocaudal position of a target object is 6 cm, 7 cm, and 8 cm away from the fish head, respectively, and (b), (d), (f) indicate temporal electric images with forward swimming when the rostrocaudal position of a sensor is 6cm, 7 cm, and 8 cm, respectively
2.3 Relative slope in the spatiotemporal domain
The electric perturbation generated by a target object depends on the distance between an electroreceptor and the center of the target. The rostrocaudal position of the object can be easily checked by the peak position. As described above, the relative slope or relative width are distance measurements that are valid regardless of the size and conductivity of the object. Here, we focus on the relative slope.
The relative slope is a direct cue for the lateral distance of a target object, irrespective of size and conductivity. Figure 4 shows relative slopes in spatial and temporal electric images. The spatial relative slope has more variance when the rostrocaudal position of a target object changes. However, the temporal relative slope based on forward swimming remains consistent even when the rostrocaudal position of a sensor changes. In addition, the rostrocaudal position of a target has no impact on measurement, since the sensor scans a target object using the motion of forward swimming. Regardless of which sensor in the body measures the electric perturbation, the temporal relative slope can estimate the distance to a target object without difficulty. In contrast, the spatial relative slope depends on the rostrocaudal position of a target object, and therefore requires the whole map of relative slope patterns for varying rostrocaudal positions to be constructed to estimate the distance. To localize an object using the electrosensory system, the rostrocaudal position is first checked with the peak amplitude, and then the lateral distance can be found with the distance map for the rostrocaudal position.
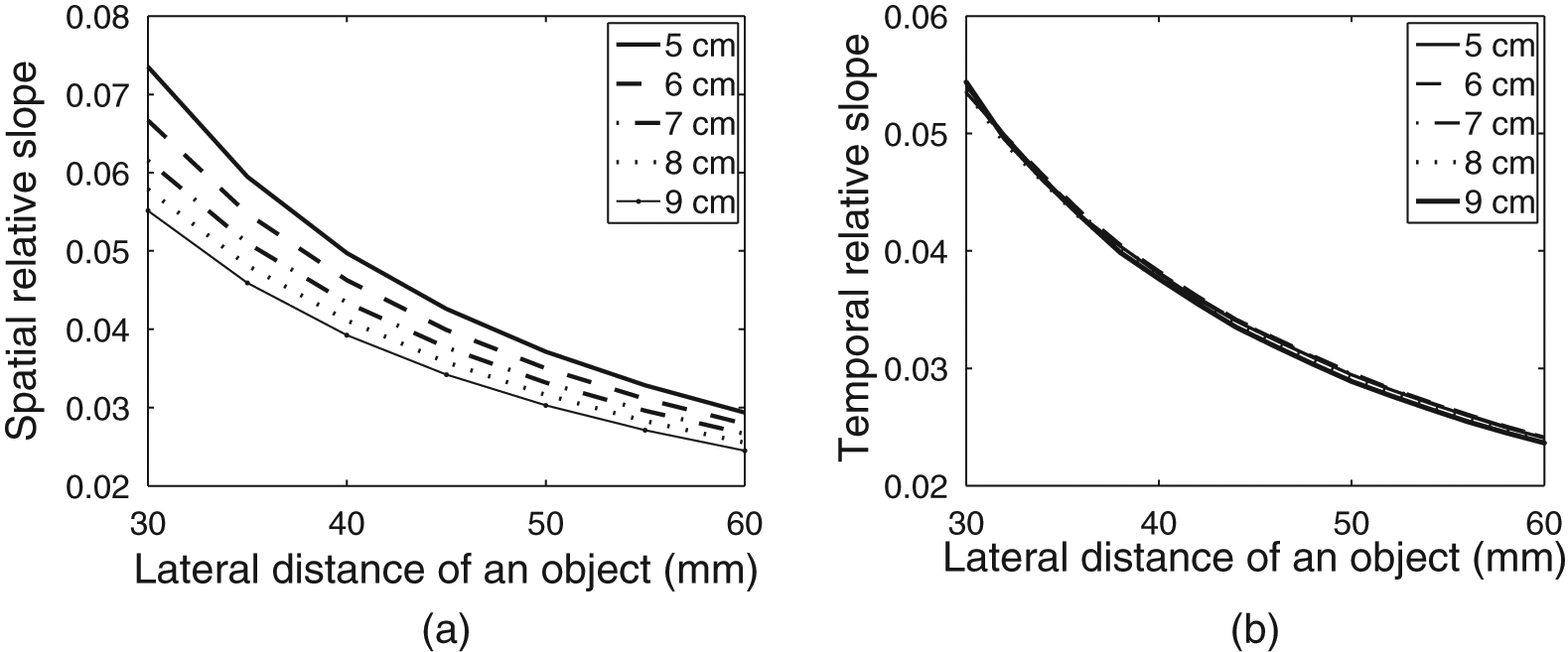
Spatial and temporal relative slope patterns. (a) Relative slopes in spatial electric images. Varying rostrocaudal positions of a target from 5 cm to 9 cm were tested. (b) Relative slopes in temporal electric images during forward swimming. Varying rostrocaudal positions of a sensor from 5 cm to 9 cm were tested.
When there is more than one object in the environment, the above two measures, spatial relative slope and temporal relative slope, can be applied in a similar manner. Electric images are distorted by interactions between individual images when there are multiple objects. In our model, the images are drawn as overlays of electric images of each spherical object at different rostrocaudal positions, assuming minimal interactions between the electric images produced by each object. We must determine which measure is the least affected by the interactions of multiple objects in an electric image. We hypothesize that the temporal relative slope is helpful for the localization of multiple target objects due to the independence of the rostrocaudal positions of the measuring sensor or multiple objects.
Figure 5 shows normalized electric images in both spatial and temporal domains. The spatial and temporal relative slopes are needed to calculate maximal positive slope in these normalized electric images. The normalized spatial and temporal electric images show different patterns. Positive slopes (the left half of the image) have more variance than negative slopes (the right half of the image) for different rostrocaudal positions of a target object in normalized spatial images (Figure 5(c)). We note that the relative width or full width at half maximum of the curve may also vary depending on rostrocaudal position. Normalized temporal images have different styles of curves and show more variation in negative slopes (the right half of the image) when the sensor position changes, while the positive slopes (the left half of the image) are almost identical. Relative half-width on the rostral side may also be an invariant measure. If a fish swims backward, the temporal electric image will be a mirror image of that formed during forward swimming. In such a case, negative slope patterns will be invariant in the temporal image. The spatial relative slope (the maximum positive slope in the normalized spatial image) decreases when a target object approaches the tail of the fish along the rostrocaudal axis, while the temporal relative slope is independent of the rostrocaudal position of the sensor. There is a minor effect on the temporal slope only when the sensor is close to the tail.
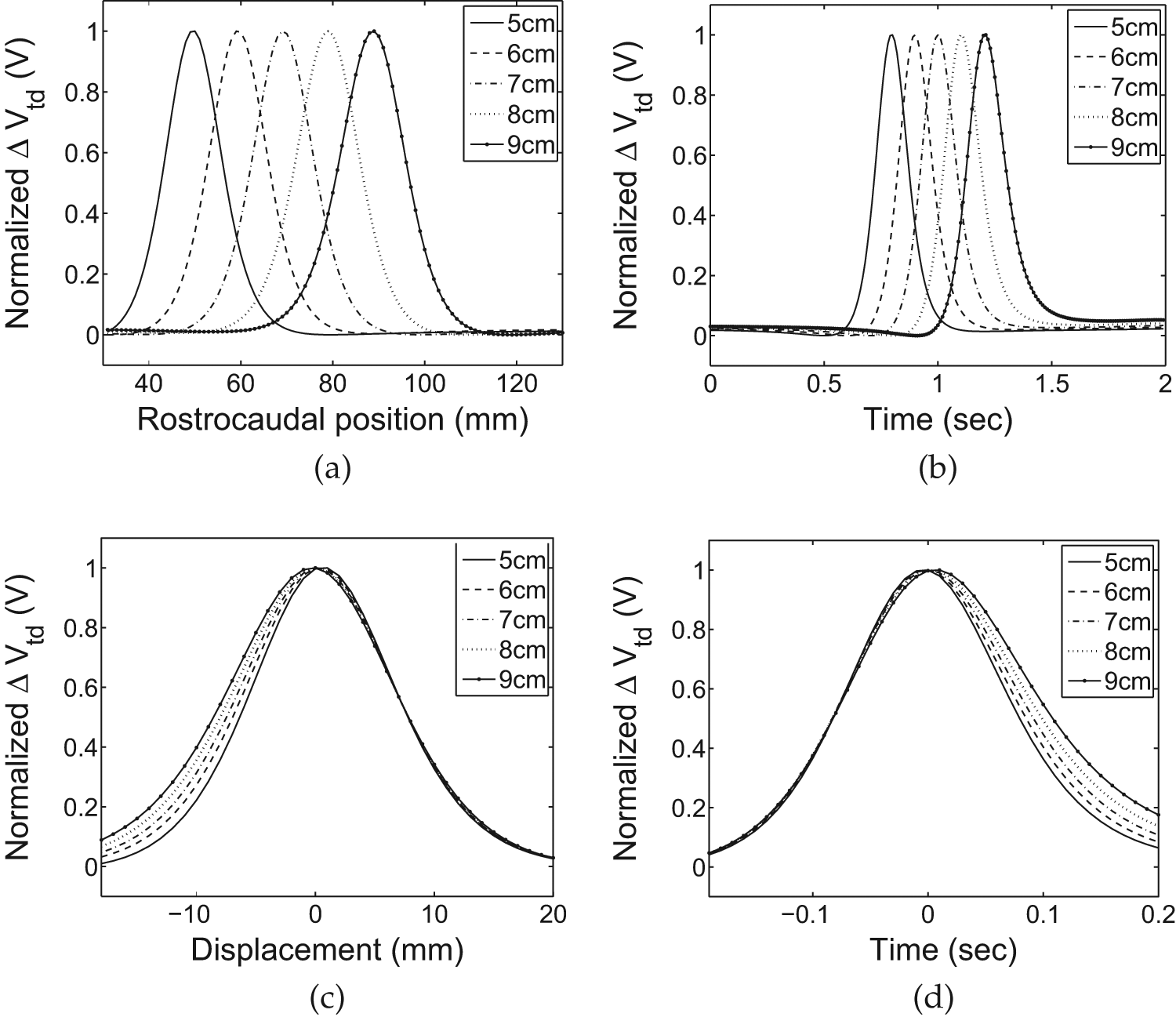
Normalized electric images in the spatial and temporal domains. (a) Normalized spatial electric image when the rostrocaudal position of a target object changes. (b) Normalized temporal electric image when the sensor position changes. (c) Spatial electric images shifted from normalized (a) images so that they have the same peak positions; the resulting images have almost identical caudal slopes. (d) Temporal electric images shifted from normalized (b) images so that they have the same peak positions; the resulting images have almost identical rostral slopes.
von der Emde et al. (1998) referred to the negative relative slope in the spatial electric image as the caudal slope, and noted that the caudal slope cannot be used as a distance measurement because of the asymmetric changes of electric fields caused by the proximity of the EO. In spatial electric images, the caudal slope changes unsystematically when the lateral distance to the object varies (von der Emde et al., 1998). The experiments were based on mormyrid fish with pulse-type EODs. However, unlike these experiments, our simulation based on gymnotiform fish shows that the caudal slope has a relatively small variance. In this paper, we derive the positive slopes in the spatial electric image as well as in the temporal electric image, by adhering to the general concept of relative slope.
3 Experiments
3.1 Spatial and temporal electric images
When there is more than one object in the environment, the resulting electric image can be approximated as the sum of electric images generated by each target object, if there are small interactions between the individual images, or the perturbation fields produced by the objects have little influence on each other (Babineau et al., 2007; Engelmann et al., 2008). The superimposed electric images of multiple objects yield distorted intensities, which change the amplitude and slope. This makes it difficult to accurately estimate distances to multiple objects. The shape and conductivity of a target object also influence the electric field pattern. Perturbation by a sphere can be modeled like that generated by a dipole (Rasnow, 1996). Here, multipleobjects are modeled as spheres to simplify the electrolocation problem.
Spatial and temporal relative slopes are used to calculate the ratios of maximal slope to maximal amplitude in the spatial and temporal domains, respectively. We investigate different patterns of electric images depending on object sizes or positions, and compare the corresponding relative slopes. To compare differences between spatial and temporal structures, three different placements with two target objects, small or large, were tested. The electric images of the two objects are displayed in Figure 6. Figure 6(a)–(c) is the spatial electric image taken along the rostrocaudal line, and the last row of the figure (Figure 6(d)–(f)) is the temporal electric image observed by a specific sensor while the fish swims forward. In the temporal electric image, the maximum amplitude depends on target object characteristics such as size, shape, and position, but not on sensor position. In contrast, the spatial electric image reflects perturbation of the electric potential along the rostrocaudal sensory line and the electric image is affected by the rostrocaudal position of the target object, as described in the previous section. The same results are true for multiple objects.
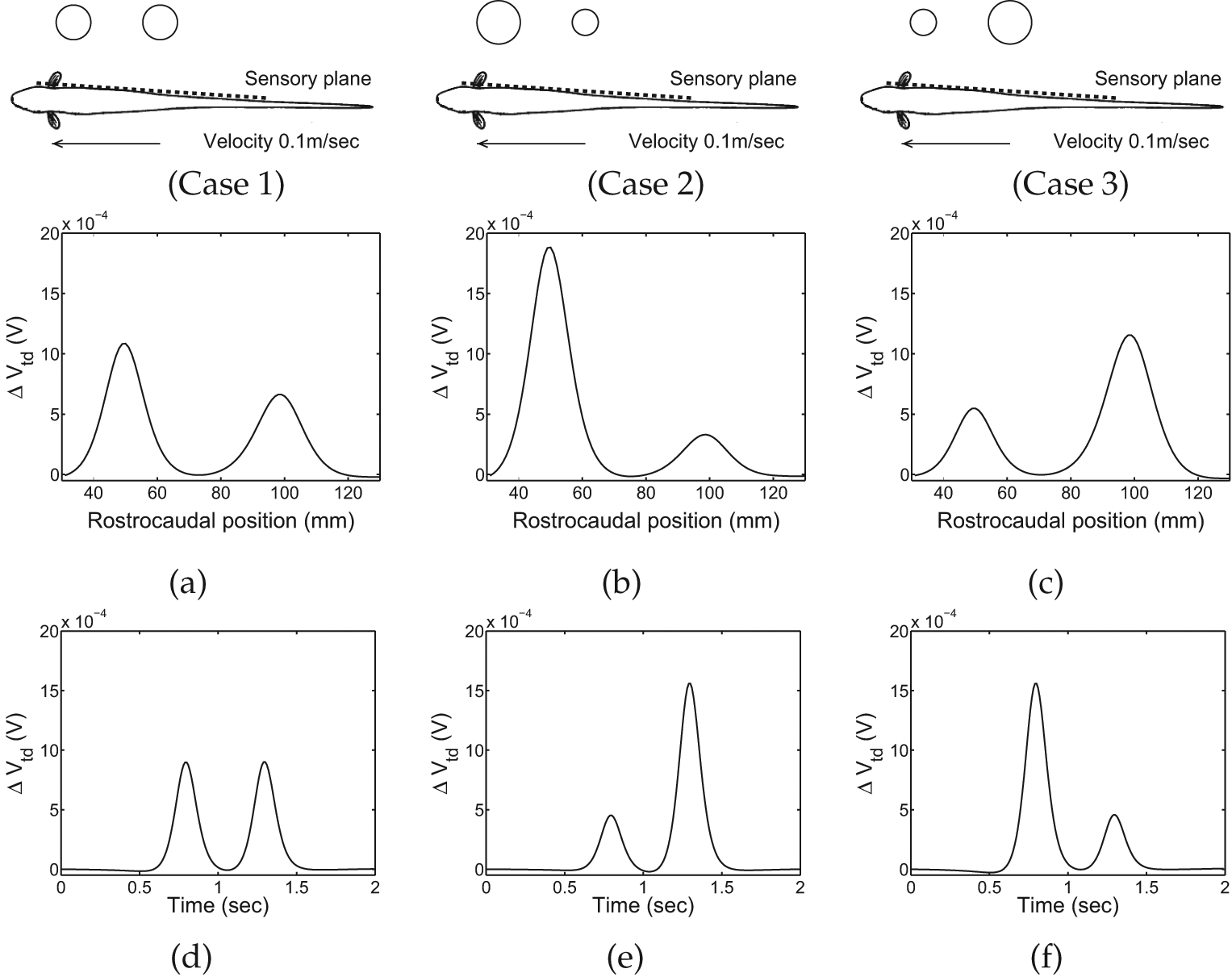
Electric images of two target objects; spatial electric images for (a), (b), and (c), and temporal electric images during forward swimming for (d), (e), and (f). Small (radius 0.8 cm) or large (radius 1.2 cm) objects are placed at the same lateral distance (medium-sized objects (radius 1 cm) for case 1). The rostrocaudal positions of two objects are 5 cm and 10 cm away from the fish head, respectively, in the spatial electric images, while the temporal reading sensor is 8 cm away from the fish head in the temporal electric images.
In spatial electric images, weakly electric fish may extract relative slopes from local electric images corresponding to each object, one by one. We easily observe different peak amplitudes for objects of the same sizes at the same lateral distances, when the objects are positioned at different rostrocaudal positions. The spatial relative slopes of the two objects are different, even when the lateral distances of the objects are the same. In contrast, temporal electric images show the same peak amplitudes for objects of the same size even at varying rostrocaudal positions. The fish scans objects from the caudal to rostral side, and the resulting electric image has higher amplitude if it is of a larger object.
Figure 7 shows another case with two target objects in which one object is closer to the fish than the other. The corresponding electric images depend on the sizes and lateral distances to objects. The maximum amplitude is greatest when a large object is close by. In Figure 7(b), case 5 generates small amplitudes in the electric image due to a large object that is farther away and a small object that is closer, and the relative slope is distorted by the superposition of the signals. When the target object moves farther from the fish, the width of the curve increases, the image becomes blurred, and the intensity decreases. In Figure 7, we note that the electric curve generated by the second object (the object on the left) seems to be blurred and the corresponding electric image might be distorted by the electric perturbation of the first object (the right object) on the caudal side.
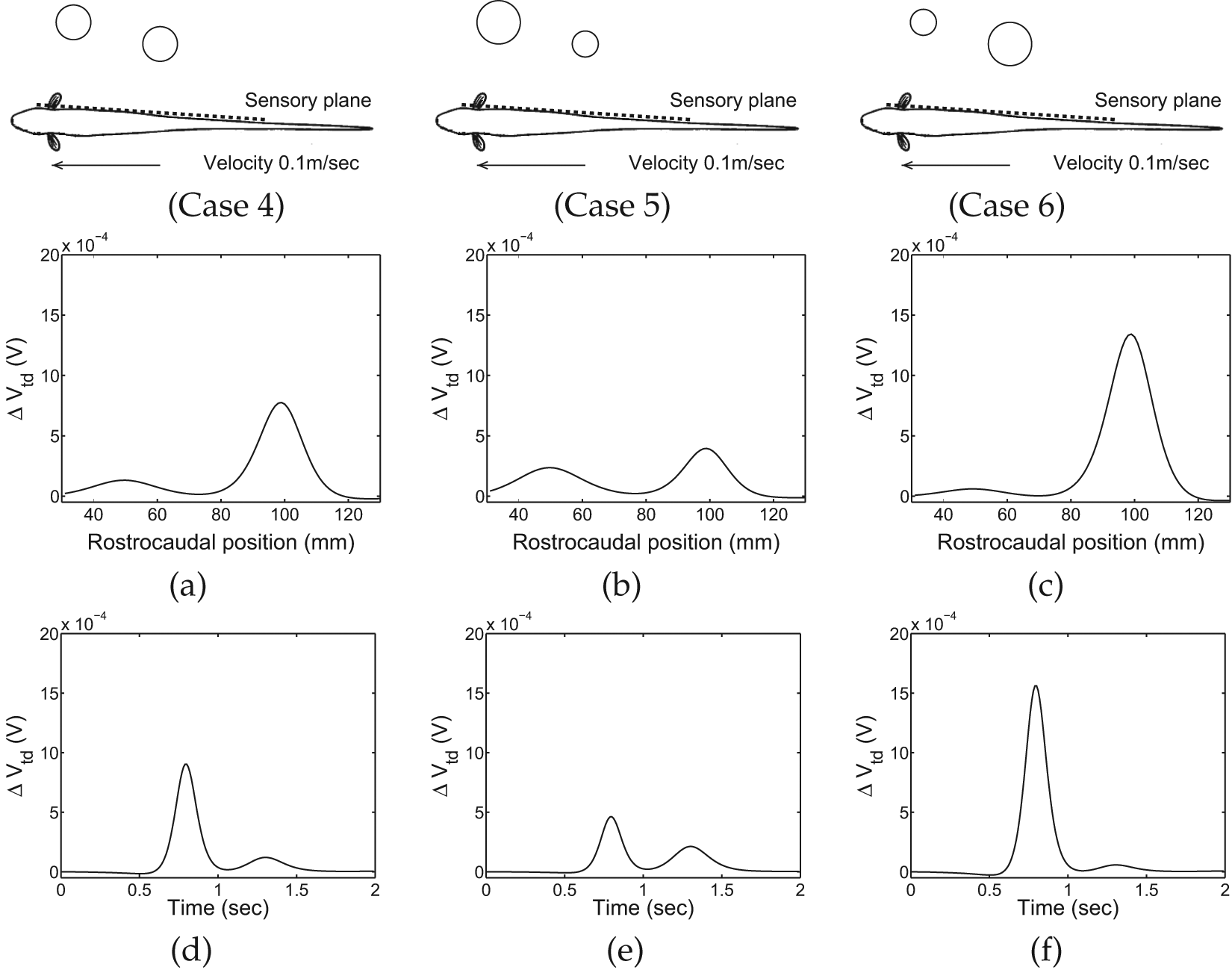
Electric images of two target objects; spatial electric images for (a), (b), and (c), and temporal electric images corresponding to forward swimming for (d), (e), and (f). Small (radius 0.8 cm) or large (radius 1.2 cm) objects are placed at different lateral distances from the fish, 3 cm or 2 cm. Medium-sized objects (radius 1 cm) are used in case 4.
In the experiments shown above, target objects were assumed to have the same conductivity as metal. We also tested different conductivities for cases with two target objects. Conductivity influences electric images. Large amounts of conductivity draw relatively large amplitudes that influence the electric images of neighboring objects. Two objects of the same size but with different conductivities produce different patterns in a temporal electric image. However, the relative slope over the electric image for each object is almost identical. It can therefore be inferred that the two objects are positioned at the same lateral distance from the fish. Temporal electric images formed during forward and backward swimming are mirror images of each other, and the two kinds of temporal relative slopes show different patterns. If we apply the same relative slope measurements with positive slopes to both images, two different features can be obtained from temporal sweeps in both directions. This feature is useful to extract the characteristics of multiple objects.
When weakly electric fish capture prey, they display back-and-forth swimming behavior (Bacher, 1983; Lannoo & Lannoo, 1993;MacIver, 2001; Nanjappa et al., 2000). Weakly electric fish might use temporal relative slopes from both backward and forward swimming in order to obtain electrolocation features.
3.2 Spatial and temporal relative slopes with multiple objects
Larger, closer objects generate greater electric perturbations, and the relative slopes of smaller objects are severely affected by the interactions of individual images. The sizes, conductivities, lateral distances, and inter-distances of multiple objects influence whole electric images. The spatial relative slope is particularly sensitive to the interactions of multiple objects. From these results, the temporal electric image determined at a single electrosensor based on active body movement is an effective measure to estimate distances to multiple objects.
Figure 8 shows two target objects in the near-field, and we can identify the corresponding electric image in the spatiotemporal domain. Figure 9 shows the corresponding spatial and temporal relative slopes, and we observe distortion as an effect of the interactions of the electric images. Two different objects have different spatial relative slopes at each rostrocaudal position, as shown in Figure 9(a). The temporal relative slope has almost identical values for varying positions of the sensor. However, the temporal relative slope is also affected by the interactions of electric images, and the measurements may be adversely affected for objects located at longer distances when a weakly electric fish swims forward (Figure 9(b)). Objects at longer distances produce small amplitudes in the electric image and the interactions of the images change the original electric image patterns, which leads to an inaccurate underestimation of lateral distance.
Spatiotemporal electric images. (a) Diagram of sensors and target objects. (b) Spatiotemporal pattern when a weakly electric fish swims forward and passes by two target objects; the velocity of the fish is 0.1 m/s (maximum intensity is normalized to 1).
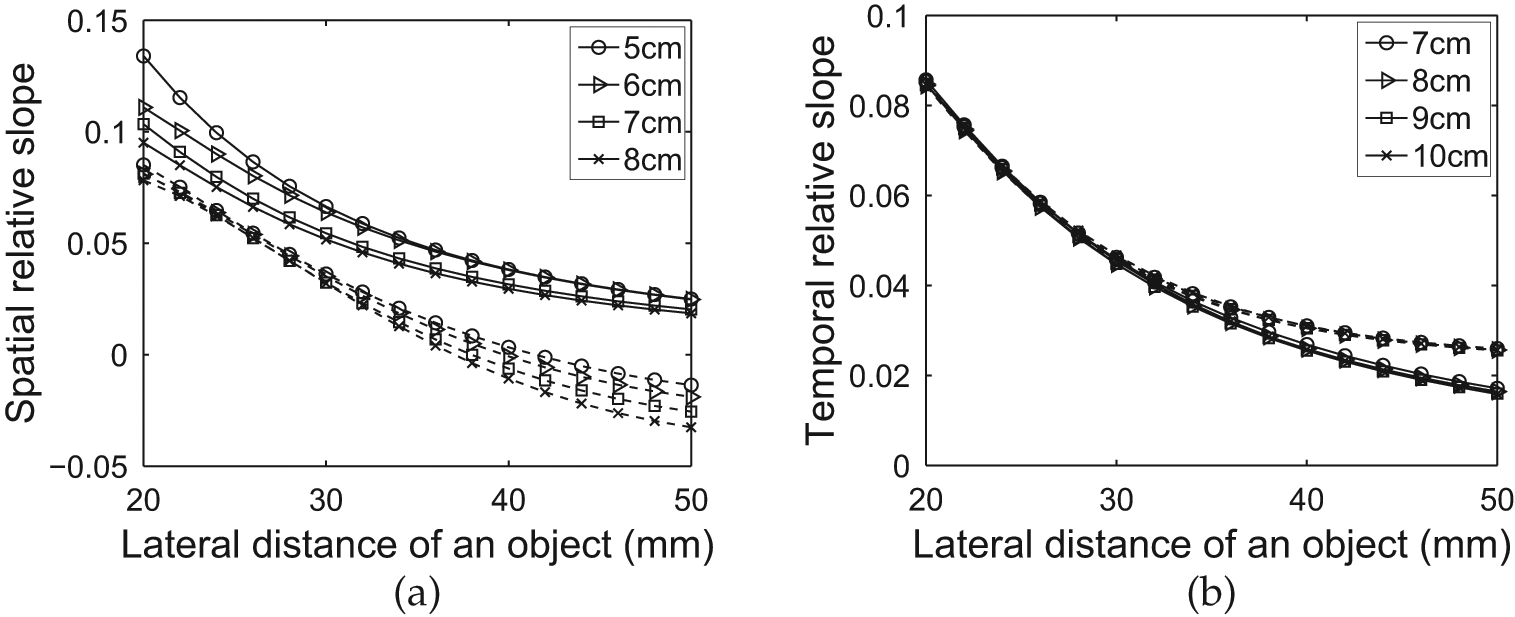
Relative slopes of two objects (see Figure 8). (a) Spatial relative slope with varying rostrocaudal positions of the left object (solid line), 5 cm, 6 cm, 7 cm, and 8 cm; the right object (dashed line) is closer to the tail, the two objects have a fixed inter-distance of 5 cm, and the radii of the two objects are 1.2 cm and 0.8 cm, respectively. (b) Temporal relative slope based on forward swimming with varying positions of the measuring sensor, 7 cm, 8 cm, 9 cm, and 10 cm.
If an object is close to the tail, or it has large conductivity, or is large and at a short distance, electric perturbation increases. The object may have a dominant effect on the potential levels of neighboring objects. The distortion level will depend on the inter-object distance between the dominant object and neighboring objects. Spatial relative slopes are more sensitive to such types of distortion. In a temporal electric image, electric perturbation also depends on the sizes, conductivities, and inter-distances of objects. As in spatial images, close objects are difficult to discriminate. However, if a temporal electric image based on backward swimming is monitored, then the relative slope may be used to accurately estimate the distances of objects. Backward swimming can therefore provide more information about objects.
For multiple objects of varying sizes, varying conductivities or varying distances, an object can be dominant in the potential levels of spatial and temporal images. If a relatively large object is close to a small object, or an object is near the fish body, the electric image of the object becomes dominant and the features of the other object are influenced by the dominant object since there is a large distortion in the electric image. The distance to the dominant object can be obtained accurately, while estimates of the distance to the other object become relatively inaccurate.
Another factor that must be considered in the electric images of multiple objects is inter-object distance. The closer the inter-object distance is, the greater the discrepancy between the estimated distance and the original distance. The temporal relative slope may be used to estimate lateral distance more accurately than the spatial relative slope. Here, we assume that the spatial relative slope uses the distance map for varying rostrocaudal positions. Further experiments show that the distance estimated by the temporal relative slope is closer to the actual distance than that estimated by the spatial relative slope, for the same inter-object distance (data not shown). A spatial acuity problem occurs if the inter-object distance is very small. The two electric images will be almost overlapped, and it will be difficult to discriminate the features of the two objects. Babineau et al. (2007) defined spatial acuity as the minimum inter-object distance of multiple objects that are able to be discriminated.
Based on our experiments, the temporal relative slope is more useful for engineering applications including estimations of distance to multiple target objects.
4 Discussion
Weakly electric fish show a variety of foraging behaviors. Wave-type EOD species such as gymnotiforms display back-and-forth swimming behavior while foraging (Bacher, 1983; Lannoo & Lannoo, 1993; MacIver, 2001; Nanjappa et al., 2000). It has been argued that the temporal information collected during such foraging behaviors is related to localization of objects. However, the kinds of mechanisms that are used to obtain localization information remain unknown. In this study, we used temporal processing based on back-and-forth swimming motions to estimate distances to multiple objects.
Previously Chen et al. (2005) showed that the full width at half maximum in the temporal electric image of an electroreceptor can help determine object distance. However, measurements vary depending on sensor position, as shown in Figure 5. The slope-to-amplitude ratio suggested by von der Emde et al. (1998) corresponds to the spatial relative slope. It provides object distance information, but requires the use of many sensors along the rostrocaudal axis and depends on the rostrocaudal position of a target object. These approaches have not been tested for multiple objects. Babineau et al. (2006) showed that the normalized width of the temporal image can estimate spatial acuity to discriminate prey in complex electrosensory backgrounds. However, this measurement is also affected by variation of electric images caused by the positions of measuring sensors. We suggest that the temporal relative slope at the rostral side can provide an invariant feature of localization that does not depend on sensor position. In addition, forward and backward swimming provides localization information about multiple objects, unless the objects are too close.
Figures 6–8 depict the electrolocation of multiple objects of varying sizes or at varying lateral distances. Similar pattern curves can be found for varying conductivities of objects. According to equation (5), the electric image is proportional to the conductivity of a target object. Both spatial and temporal relative slopes provide cues for lateral distance to an object, irrespective of conductivity. Thus, temporal relative slope at one electroreceptor could be used to estimate the distances to multiple objects even if they have different conductivities. If two objects have different sizes, conductivities, or distances, the interactions of electric images become more complex. The temporal relative slope may provide inaccurate information regarding distances. The accuracy depends on the interaction levels of electric images caused by objects.
In our simulations, we assumed that the target objects were spherical. Many environments include multiple objects that may be large or irregular in form. The suggested measure, the temporal relative slope, has limitations for evaluating such objects. von der Emde et al. (1998) showed that electric fish judge spherical objects to be farther away than cube-shaped objects at the same distances. The spatial relative slopes and slope-to-amplitude ratios are smaller for spherical objects. Temporal relative slopes also differ depending on the shapes of objects. Further studies are required to assess how valid temporal relative slope is for the localization of objects of arbitrary shapes or shapes other than spheres. In our model, the electric images of multiple objects are approximated using the sums of images of individual objects, assuming that the interactions of images are relatively weak. However, when the inter-object distances become small, this assumption can no longer be applied and a more refined model is required to account for all of the interactions of individual images. Alternatively, we can apply the finite element method for electric images of multiple objects.
To apply the electrolocation system to a biomimetic robotic fish, it is necessary to mount many electrosensors, which in turn requires a great deal of computing time and memory to process electrolocation information. To simplify the electrosensory system, we may use a very small number of electrosensors, and observe the temporal sequences of their sensor readings. We can model back-and-forth swimming movements of a robotic fish, and the temporal relative slope can be applied to estimate lateral distance. The rostrocaudal position of a target object can be estimated using the time course of intensity or coarse coding of neurons (Kim, 2006) over the potential perturbations of several sensors. The kinds of biological processes that are available for the localization of multiple objects remain unknown. Many electrolocation studies have focused on sensor readings from a collection of electroreceptors along the rostrocaudal axis. Here, we address the characteristics of temporal sensor readings from an electrosensor during active forward swimming. To support this type of electrolocation in weakly electric fish, further behavioral and physiological studies are required.
Electrolocation is directly measured from sensor readings based on temporal sweep motions in our approach. It is unknown whether or not high-level learning mechanisms or adaptability (Thompson, Porr, & Wörgötter, 2010) are involved in sweeping motions and the corresponding electrolocation. The predictive information in the sensorimotor loop (Zahedi, Ay, & Der, 2010) may assist more efficient localization of multiple target objects. Whether or not adaptive filtering in the electrosensory mechanism (Bell, Han, & Sawtell, 2008) is related to electrolocation, or how adaptive filtering and electrolocation are linked to each other, if it is, is an open question.
5 Conclusion
In the electrolocation systems of weakly electric fish, features of electric images are used for the identification of target objects. The rostrocaudal and dorsoventral positions of a target object can be estimated using the location of the maximum intensity of electric perturbation in the sensory plane. Weakly electric fish may use relative slope to estimate lateral distance (Sicardi et al., 2000; von der Emde, 1999, 2006; von der Emde et al., 1998).
Two types of relative slopes, spatial and temporal relative slopes, can be effective measures for localization in wave-type EOD species or corresponding artificial artifacts. In particular, the temporal relative slope is estimated using temporal electric images based on active sensing. We suggest that temporal relative slope is effective for the localization of multiple objects. The temporal relative slope is easy to measure with only a few sensors and provides invariant features for the localization of objects when a fish swims forward or backward.
For environments with more than one object, we use local slope changes to estimate distances to each object. Electric images as well as relative slopes are distorted by the electric perturbations of neighboring objects. To apply spatial relative slope to the localization of multiple objects, it is necessary to store all relative slope template patterns for varying rostrocaudal positions of objects. In contrast, for temporal electric images, it is possible to apply a single temporal relative slope pattern to all electroreceptors. This implies that a single electrosensor is sufficient to localize an object. However, both measures are affected by the interactions of electric images from multiple objects. These measures depend on size, conductivity, and distances of objects as well as inter-object distance. Thus, such measures would be effective for localization only if the interactions or interferences of multiple objects are relatively weak, for example, in environments limited to a few sparsely distributed objects.
It is an open question whether real fish use temporal relative slope to estimate distance. However, this measure can be applied easily to biomimetic robots or artificial artifacts. The use of a few sensors with active sensing can determine distances to objects without difficulty. The use of temporal relative slope can thus reduce computing time and costs to process electrolocation data, and is a feasible measure in underwater robotic systems. We did not test situations with more than two objects, but the interactions of multiple corresponding electric images will more severely distort the electric images of single objects. The accuracy of the suggested method will depend on size, conductivity, lateral distance, and inter-object distance. Further studies are required to determine electrolocation rules in environments with many objects.
Footnotes
This work was supported by the Mid-career Researcher Program through an NRF grant funded by the MEST (No.2011-0000210), South Korea.