
Abstract
The goal of this research is to understand the underlying mechanism of the behavioral diversity of animals and then use the findings to build truly adaptive robots. Behavioral diversity is an inherent feature of all animals, and it is also important for robots to perform adaptively in unknown and dynamically changing environments. This feature enables animals to select adaptive behavior from among versatile behaviors. However, most designers have avoided or ignored behavioral diversity while constructing artificial systems, with the aim of achieving highly optimized performance in specific environments for given tasks; this leads to vulnerability of these systems to environmental changes. To understand how behavioral diversity can be embedded into artificial systems, we focus on a large amoeba-like unicellular organism, i.e., the plasmodium of true slime mold (Physarum polycephalum), in this study. Despite the absence of a central nervous system, the plasmodium exhibits various types of locomotion (i.e., exploratory, taxis, and escape behaviors) and switches its behavior depending on the environment. Inspired by this primitive yet intelligent living organism, we build a modular robot that exhibits exploratory and taxis locomotions, and spontaneously switches between them in a fully decentralized manner according to the situation encountered. The results are expected to shed new light on a design scheme for life-like robots that exhibit amazingly versatile and adaptive behaviors.
1 Introduction
All living systems—from protozoa to mammals—inherently exhibit versatile behaviors. Because of this behavioral diversity, living systems are able to exhibit adaptive behaviors in unknown and dynamically changing environments by selecting a suitable survival behavior from among all these versatile behaviors. However, most engineering design approaches, including some biologically inspired ones, have not focused on the behavioral diversity of animals. We believe that there are two key reasons for this: focus on a design concept to achieve a highly optimized performance in specific environments for given tasks, and performance of many biological experiments that prevent behavioral diversity of animals under a restrictive situation (e.g., many experimental animals have been starved for several hours before the experiment for the researchers to achieve a comprehensible result). Then, the goal of the present research is to understand the underlying mechanism in animals that helps them produce this behavioral diversity and to subsequently use the findings to develop truly adaptive artificial systems with behavioral diversity.
To this end, we employ the so-called back-to-basics approach. More precisely, we strategically focus on one of the most primitive living organisms: a plasmodium of true slime mold (Physarum polycephalum; Figure 1). The plasmodium is a large amoeba-like unicellular multinucleated organism, which exhibits amazingly versatile behaviors, e.g., taxis locomotion and exploration, despite its lack of a nervous system. Then, it is interesting to understand how this primitive living organism can develop and switch behaviors without having a centralized hierarchy of information processing. The key component driving its behavioral motion is coupled biochemical oscillators distributed spatially in the body (Kobayashi, Tero, & Nakagaki, 2006; Matsumoto, Ueda, & Kobatake, 1986, 1988). The cycle time is approximately 1–2 min. The coupled oscillators are similar to a central pattern generator (Takamatsu, 2004, 2006; Takamatsu et al., 2001). Hence, studying the true slime mold as coupled oscillators can contribute to understanding more universal motion control on animals, such as biped and quadruped locomotions. Interestingly, switching oscillatory patters of the true slime mold has been investigated biologically (Takamatsu, 2006; Takamatsu, Tanaka, & Fujii, 2004) and numerically (Ito, 2008). These oscillators generate rhythmic mechanical contraction, which in turn induces protoplasmic streaming between the body parts. Overall, spatiotemporal patterns of oscillations can be observed in the form of thickness variation. By changing these patterns as a result of protoplasmic interaction between the oscillators, the plasmodium generates different locomotion/behaviors: the pattern is a traveling wave for taxis locomotion and a spiral wave for rearranging the behavior (e.g., changing its moving direction; Takagi & Ueda, 2008).
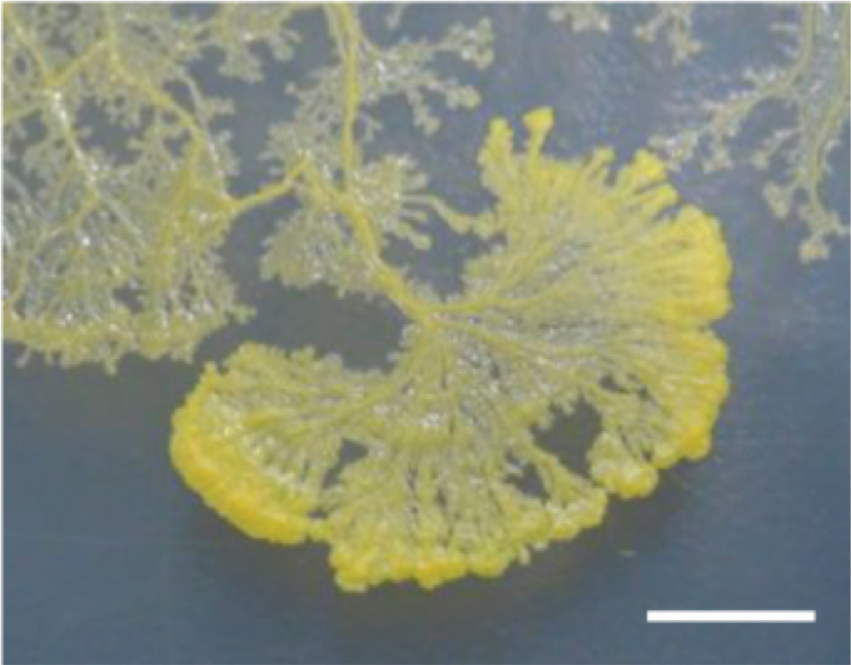
Plasmodium of true slime mold (Physarum polycephalum). The plasmodium induces amoeboid locomotion (the speed is approximately 1 cm/h) by generating thickness oscillations in its body, which are generated via protoplasmic interaction between the body parts in a fully decentralized manner. The white scale bar indicates 0.5 cm.
Inspired by this living organism, thus far, we have developed a model of the oscillator system that reproduces the versatile oscillatory patterns, and have demonstrated the validity of the model through both simulation (Umedachi, Idei, Ito, & Ishiguro, 2013a) and experimental investigations with a real physical robot (Umedachi, Idei, Ito, & Ishiguro, 2013b). However, we are still faced with the challenge of designing useful functionalities, i.e., generating different types of locomotion according to the oscillatory patterns and switching locomotion patterns depending on the situation, as done by the true slime mold. As biochemical oscillators of the true slime mold have mechanosensing function and physically interact with the total volume conservation of the protoplasm (mechanical constraint of the body), decentralized pattern switching is thought to be achieved easily by alternation of the force profile on the body, e.g., locally changing the stiffness properties of the body parts (Matsumoto et al., 1986; Tero, Kobayashi, & Nakagaki, 2005).
This paper introduces a modular robot (Figure 2) that is based on the previous oscillator model and induces various locomotions (i.e., exploratory and taxis behaviors) and spontaneously switches between these behaviors in a fully decentralized manner depending on the encountered situation. The significant features of this robot are threefold: (i) the modular robot is capable of reproducing versatile oscillatory patterns of the plasmodium, (ii) the robot can induce qualitatively different types of locomotion on the basis of the versatile oscillatory patterns, and (iii) switching between the different types of locomotion can be performed by locally changing the stiffness of the modules. Both simulation and experimental results show that the decentralized control extracted from true slime mold works well on the modular robot, which opens up a possibility for the development of an effective design scheme for artificial systems that exhibit truly adaptive behaviors with behavioral diversity.
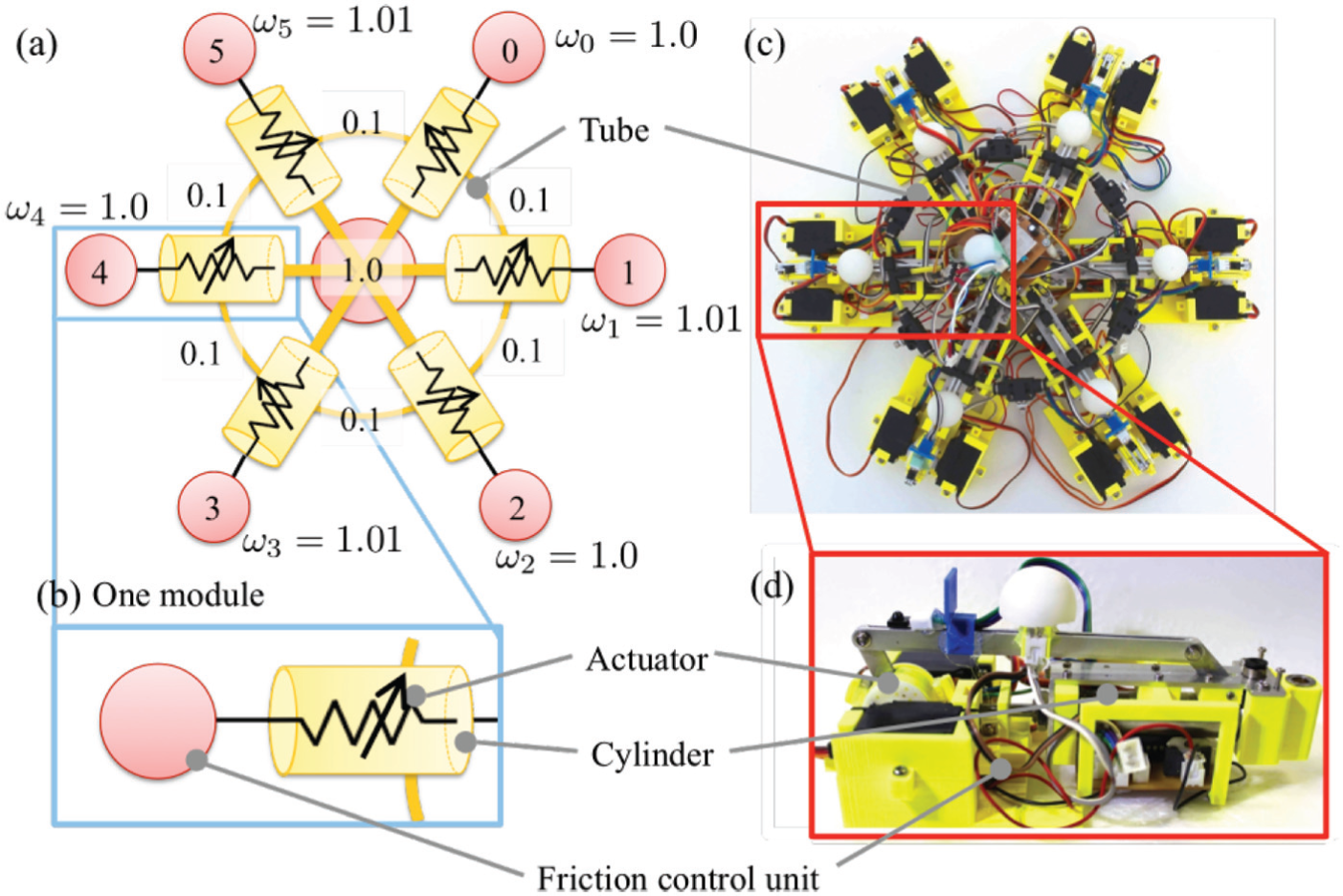
(a) Diagrams of proposed robot model composed of six modules, (b) schematic of one module, (c) photograph of the real physical robot, and (d) photograph of one module of the robot. In (a), the number of the friction control unit and the number of the tube indicate its module numbers and its fluid conductance, respectively.
The remainder of this paper is organized as follows. Section 2 summarizes the related works and then key points of our previous oscillation model. Section 3 introduces the mathematical model and hardware realization of the developed modular robot and explains its mechanical and control systems, which enable it to exhibit various locomotions in a decentralized manner. Section 4 then presents some of the important data obtained by numerical experiments. Section 5 presents important data obtained experimentally with the real physical robot. Finally, the paper concludes in Section 6 with a summary of the present work and proposed future work.
2 Related research and our previous proposed oscillator model
Several impressive robotic systems that switch their behaviors and are controlled by coupled oscillators have been proposed (Ijspeert, Crespi, Ryczko, & Cabelguen, 2007; Taga, 1994). For example, Taga designed a bipedal locomotion model that changes its gait pattern from walking to running. Furthermore, Ijspeert et al. introduced a salamander robot that produces gait transition from swimming to walking by switching the oscillator dynamics (using a saturation function) based on signal from the brainstem. These researchers carefully designed these adaptive behaviors by optimizing the parameters of the oscillators or the informational (neural/electrical) communication between the oscillators. Therefore, in order to achieve behavior switching, the parameters must be changed by a robot operator or be based on some sensor values.
By contrast to these works, our approach was to focus on mechanical interaction through the body dynamics between the oscillators of an oscillator model. We previously proposed a soft amoeba-inspired robot using coupled oscillators (as a decentralized control system) with a diffusive interaction between them, and the model and robot (Umedachi, Idei, Nakagaki, Kobayashi, & Ishiguro, 2012; Umedachi, Takeda, Nakagaki, Kobayashi, & Ishiguro, 2010, 2011) successfully generated taxis locomotion toward an attractant. As a next step, we set a goal of realizing both exploratory and taxis locomotions and spontaneous switching between them in a fully decentralized manner, to enable the robot to perform even without an explicit attractant in the real world. In our previous work (Umedachi, Idei, Ito, & Ishiguro, 2013a, 2013b), we demonstrated that oscillators can interact with each other only through their body dynamics, which allows the entire system to reproduce amazingly versatile oscillatory patterns and the transition between them without changing any parameters. By the same approach, Owaki et al. presented a real physical quadruped robot that switches its gait patterns by changing the intrinsic frequency of the oscillators (Owaki, Kano, Nagasawa, Tero, & Ishiguro, 2012).
The model we propose in this paper is a model for behavioral switching based on the “local stiffness change” of the body parts in fully decentralized manner. We believe that for soft robots (Kim, Laschi, & Trimmer, 2013; Pfeifer, Lungarella, & Iida, 2012), this behavioral switching could be a powerful method for achieving adaptive behaviors. Two important design principles for the model (Umedachi, Idei, Ito, et al., 2012; Umedachi et al., 2010) to exhibit versatile oscillatory patterns are phase modification via mechanosensory information and physical communication (i.e., morphological communication/computation; Pfeifer, Iida, & Gómez, 2006; Rieffel, Valero-Cuevas, & Lipson, 2010) stemming from protoplasmic streaming. One oscillator of the model consists of a cylinder filled with air (protoplasm for the model) and a soft actuator to generate mechanical contraction. Several oscillators are mechanically coupled with tubes filled with air, which is akin to the tube structure of the plasmodium. Mechanical interaction is induced between the oscillators via the generation of protoplasmic streaming through these tubes. Furthermore, each of the oscillators has a designed phase modification mechanism (i.e., local sensory feedback) so as to reduce the pressure from the protoplasm (i.e., mechanosensory information). This local sensory feedback was designed in the motif of the stretch-activated sensor of the plasmodium (Yoshiyama, Ishigami, Nakamura, & Kohama, 2010). In summary, the physical communication between the oscillators leads to phase modification, which in turn allows the entire system to produce versatile oscillatory patterns in a decentralized manner. In the following section, the developed modular robot is explained on the basis of this previous model.
3 Model
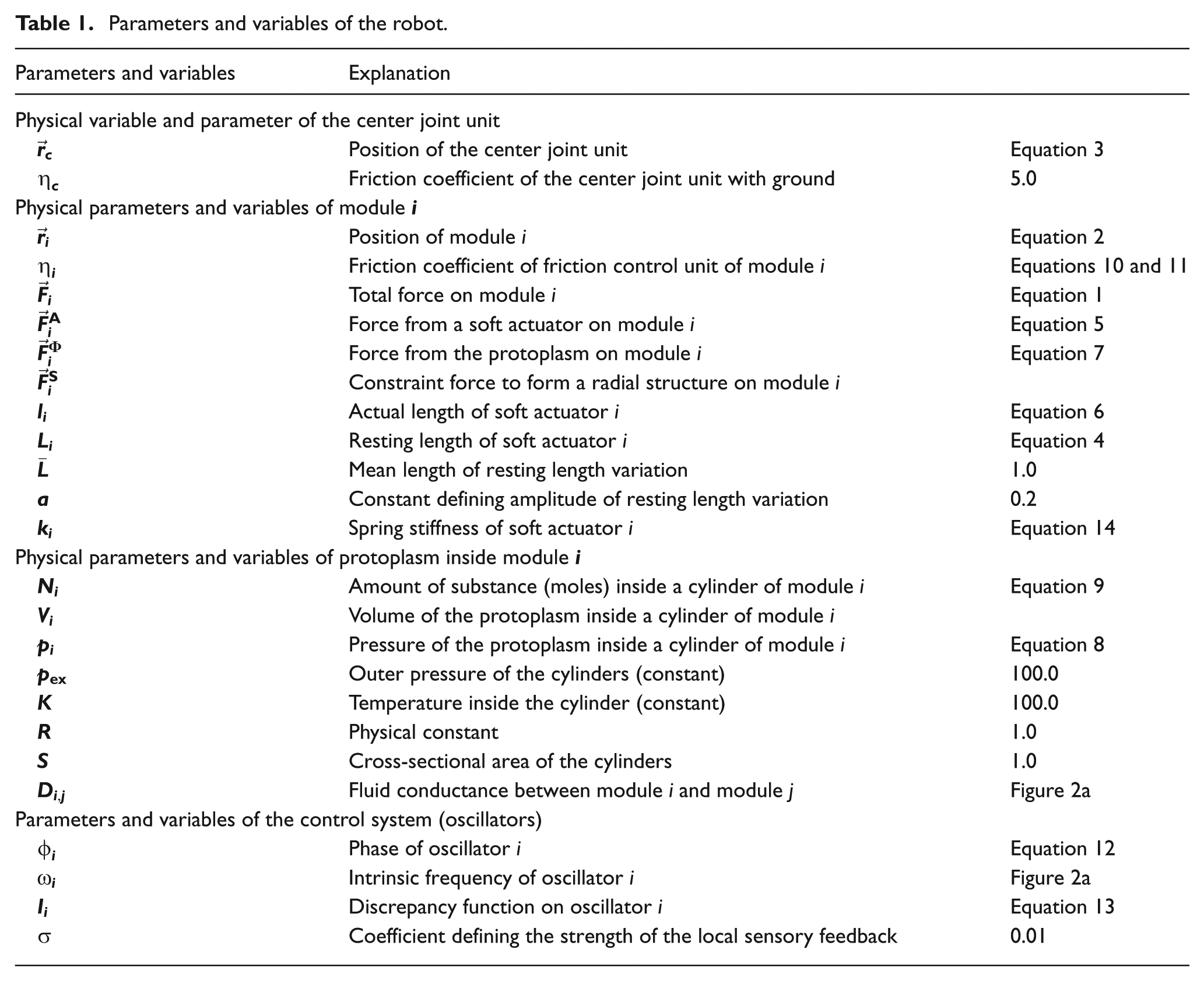
The robot includes several modules, each of which consists of a cylinder, soft actuator, friction control unit, infrared sensor (to detect the attractant), and phase oscillator (Figure 2). All parameters and variables of the model are listed in Table 1.
Parameters and variables of the robot.
3.1 Mechanical system
A center joint unit is used to mechanically connect these modules in a radial manner. 1 The cylinders are pneumatically connected using tubes, and air is sealed inside these cylinders and tubes so as to induce mechanical interactions, which is akin to the protoplasm of the plasmodium.
The soft actuator is installed to push or pull the protoplasm (i.e., air) inside each cylinder, which aids the flow of the protoplasm between the cylinders. A phase oscillator is used to control each actuator according to the phase
3.1.1 Motion equation
The motion equations for the friction control unit of module



where
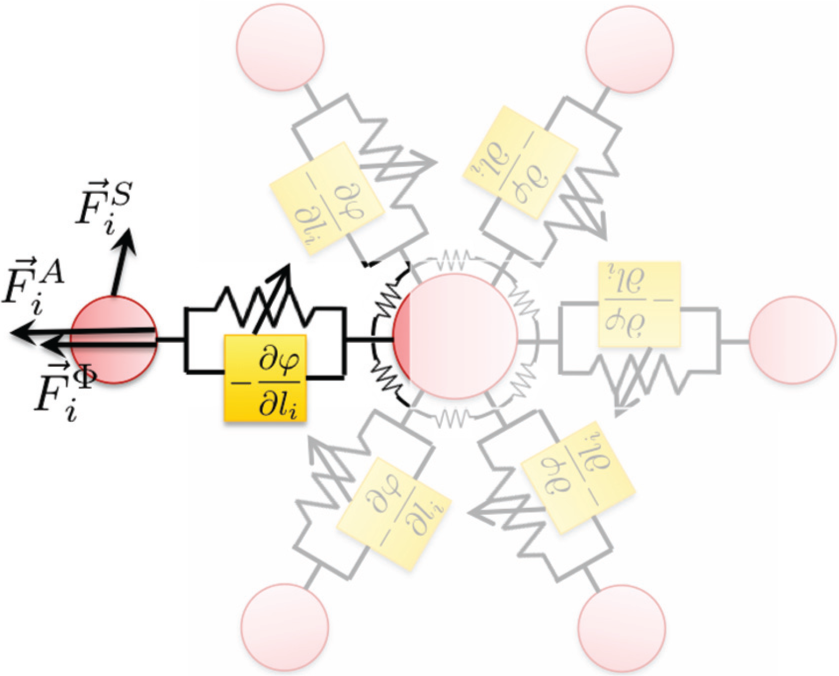
Diagram of forces on one module. Force from the actuator, force from the protoplasm, and force from the torsion springs act on the module.
3.1.2 Soft actuator
The soft actuator is assumed to be an elastic device that can independently alter both its resting length and its stiffness and is equipped with a force sensor to sense its force of compression and tension. It should be noted that the mechanical softness of the actuator allows a discrepancy (i.e., gap) between the controlled value (resting length of the device) and the actual length of the device as mechanosensory information. The stiffness of the device can be changed by adding pre-tension on two nonlinear elastic rings antagonistically (details of the hardware realization are presented in Section 3.3).
The resting length of soft actuator

where


where
3.1.3 Protoplasm inside one module
The force applied on the soft actuator


where
3.1.4 Protoplasmic streaming between modules
The modules can mechanically interact using the air-filled tubes, as shown in Figure 2. The interaction occurs because of air streaming between the modules based on the pressure gradient, which is given by

where
3.1.5 Friction control unit
To generate locomotion, each friction control unit has a ground friction mechanism that has two exclusive modes—an anchor mode and an anchor-free mode—according to the actual length of the soft actuator, which is given by


where
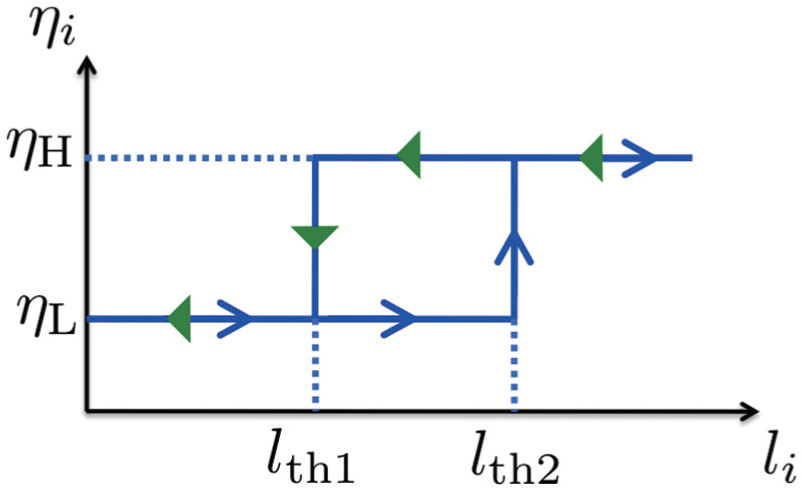
Friction control mechanism of friction control unit. The friction coefficient variation exhibits hysteresis. When the actual length increases, the friction coefficient, ηi, changes along the thin arrowheads. Conversely, when the actual length decreases, the friction coefficient changes along the delta arrowheads.
3.2 Control system
3.2.1 Dynamics of oscillator
Let us summarize the dynamics of the oscillator model to be implemented in the robot. The oscillator we have proposed is based on oscillators coupled with mechanosensory information; it senses the force applied on a soft actuator and modifies its own phase so as to reduce this sensed force. The equation for the oscillator is given as (Umedachi, Idei, Nakagaki, et al., 2012; Umedachi et al., 2010, 2011)

where

where
3.2.2 Symmetry-breaking mechanism
In order to achieve taxis locomotion when the robot detects an attractant, a simple control mechanism is employed in which the softness of the modules is varied. This mechanism is based on the biological finding that attractants can make the cells softer (Takamatsu, Takaba, & Takizawa, 2009).
2
More specifically, we vary the value of

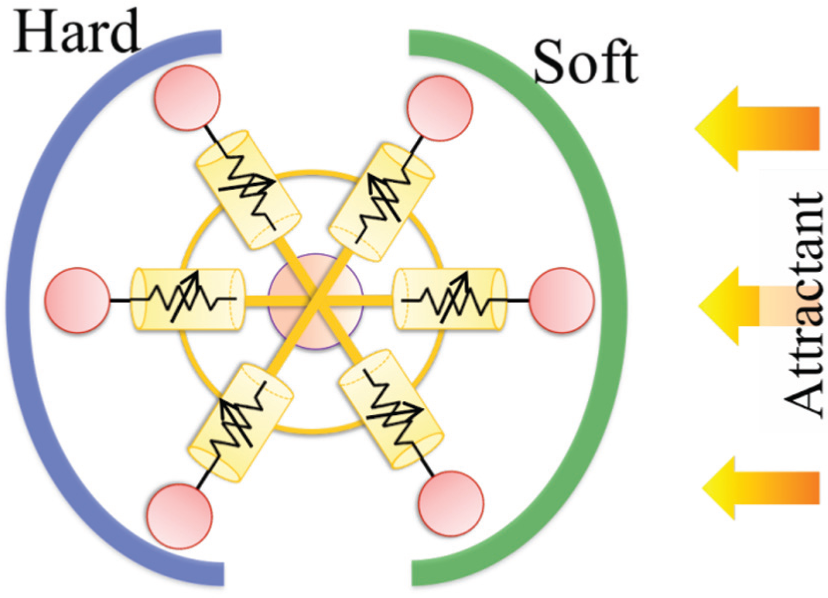
Diagram of the symmetry-breaking mechanism. The soft actuator of a unit that detects the attractant (right half in this figure) becomes softer than a unit that does not detect the attractant. This imbalance stiffness distribution promotes protoplasmic streaming between the attractant side of modules and non-attractant side of modules.
3.3 Hardware design of real physical robot
In this subsection, we present details of the hardware realization of the physical robot. Figure 6a shows a CAD image of the real physical robot, which consists of six modules. The circuit board is not shown in the figure, to retain focus on the mechanically important parts.
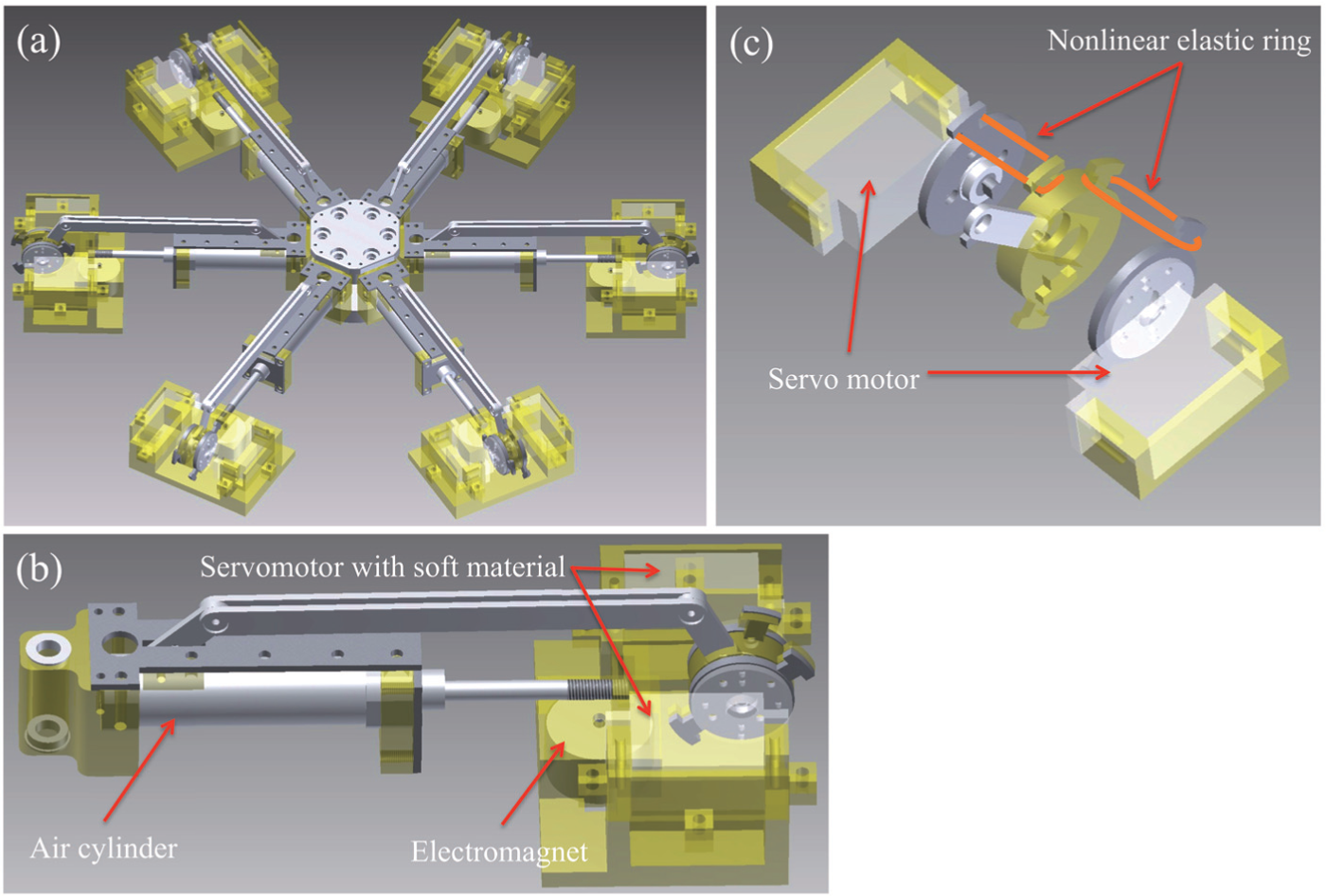
(a) CAD image of entire robot composed of six modules, (b) CAD image of one module, and (c) CAD image of soft actuator mechanical design capable of changing its stiffness and resting length independently.
As shown in Figure 6b, one module is composed of an air cylinder, electromagnet, and two servo motors with soft materials (the infrared sensor is not shown in the figure). The air cylinder is used for the protoplasm (i.e., air in this hardware realization), which is sealed inside the cylinder and used to generate distant mechanical interaction between the modules. The electromagnet is used to control the friction with the ground because the robot will be operated on iron plates. An anchor-free mode can be realized by switching the electromagnet off, whereas an anchor mode can be realized by switching the electromagnet on. The two servo motors with soft materials are used for the soft actuator, which is able to independently change the stiffness and resting length of the device.
Figure 6c shows the assembly for the hardware realization of the soft actuator. To change the stiffness of the device, we use nonlinear elastic rings and add pre-tension using antagonistically arranged servo motors. Because of the nonlinear characteristics of the actuator, the stiffness increases according to the pre-tension. With the pre-tension kept constant, the resting length can be changed by rotating the equilibrium angle using the servo motors. This implies that the stiffness and resting length of the device can be changed independently.
4 Simulation results
4.1 Simulation setup
To confirm that the model is able to generate different behaviors depending on the presence of an attractant, we conducted two numerical experiments: without and with an attractant. The model is put on a flat ground. In the simulation with an attractant, the attractant approaches from right side and we assume that half of the modules on the attractant side can detect the attractant. As the model generates versatile oscillation patterns using the mechanical interaction without random noise (Umedachi et al., 2013b; Umedachi, Idei, Ito, et al., 2012), we performed one run for a “prolonged” time and analyzed the model’s behavior for each of the two simulations.
The parameters of the model are as follows:
4.2 Locomotion without attractant
The results of the numerical experiment conducted without any attractant are shown in Figures 7a and 8. Specifically, Figure 7a shows the trajectory of the robot, which indicates that the robot moves around its environment (i.e., exploratory behavior). From the results in Figure 8, we confirmed the existence of four oscillatory patterns during one consecutive simulation run without any change in the parameters: (1) a rotation mode; (2) partial in-phase mode; (3) partial anti-phase mode; and (4) intra-oscillation mode. 3 It should be noted that the robot switched between these four oscillatory modes during one consecutive simulation run without any change in parameters. This spontaneous switching between these oscillatory modes allows the robot to generate exploratory behavior.
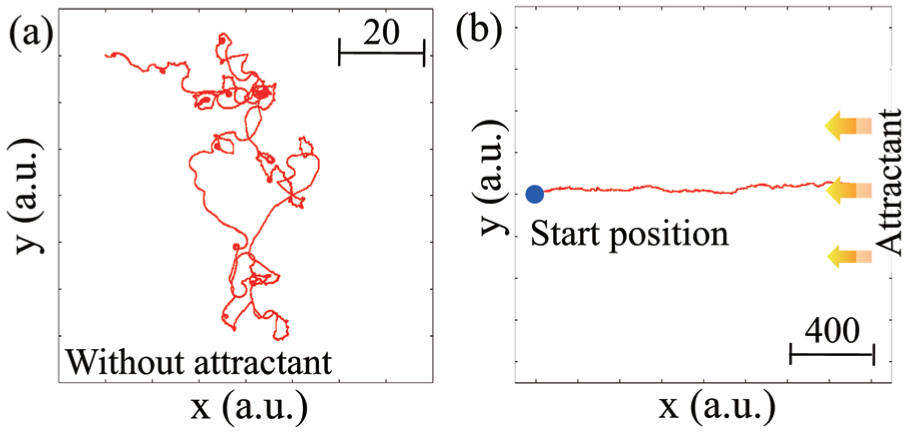
(a) Trajectory of center of robot without attractant at 0–30,000 (s), and (b) trajectory of center of robot with attractant approaching from the right side at 0–100,000 (s).
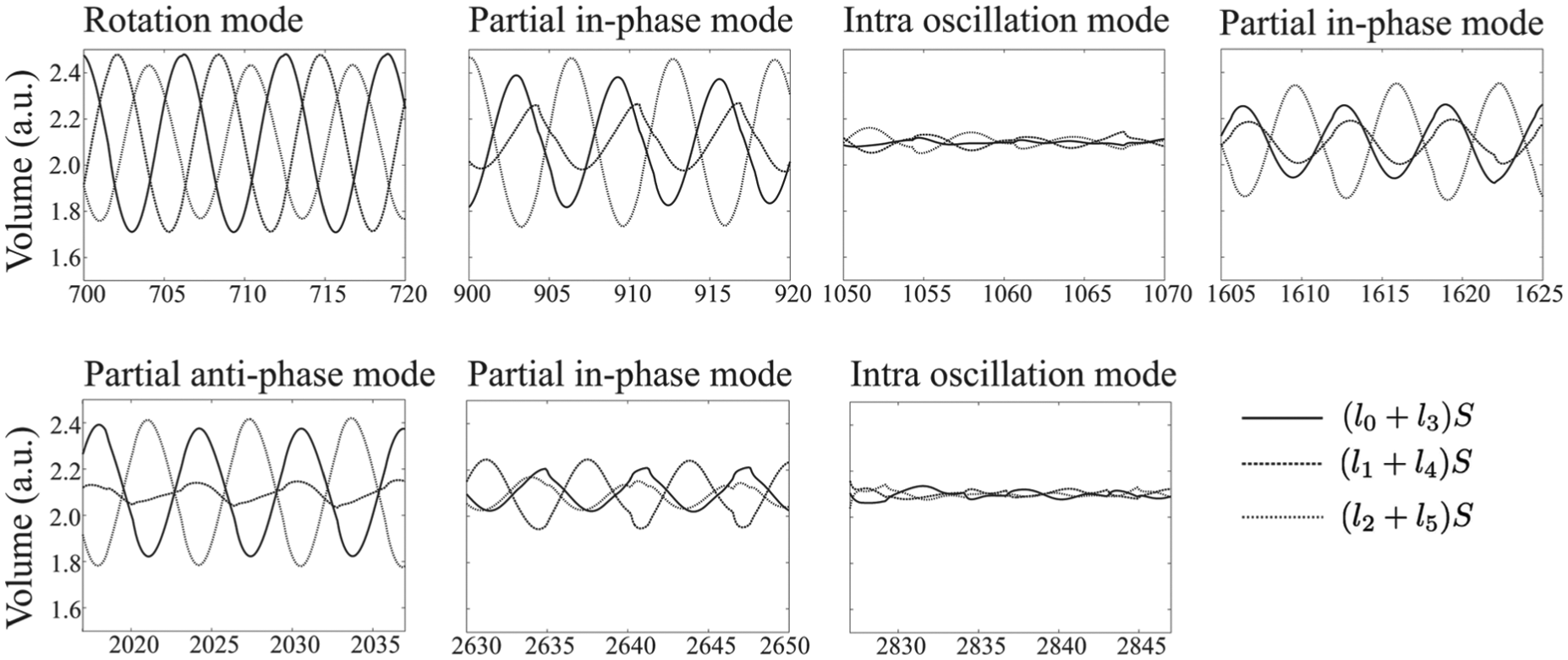
Transitions between four oscillatory modes. The solid line indicates the total volume of modules 0 and 3. The dashed line indicates the total volume of modules 1 and 4. The dotted line indicates the total volume of modules 2 and 5.
4.3 Locomotion with attractant
Results of the numerical experiment conducted with an attractant are shown in Figure 7b. In this simulation setup, the attractant approaches the robot from the right side. The simulation result shows that the robot is able to move toward the attractant. An important point to note here is that the softness of each module changes depending on whether or not the module detects the attractant (i.e., decentralized manner), which causes a bias in the movement direction of each oscillatory pattern. In addition, it changes the manner of switching among oscillatory patterns, which enables the robot to generate taxis locomotion (which is explained in the next subsection).
4.4 Probability density analysis of movement distance and movement direction
In addition, we analyzed the probability density of the movement distance and movement direction in the abovementioned simulations (i.e., the simulations with and without the attractant). The histograms of the movement distance and movement direction per period are shown in Figures 9a–d. The term “period” here means the interval of time between
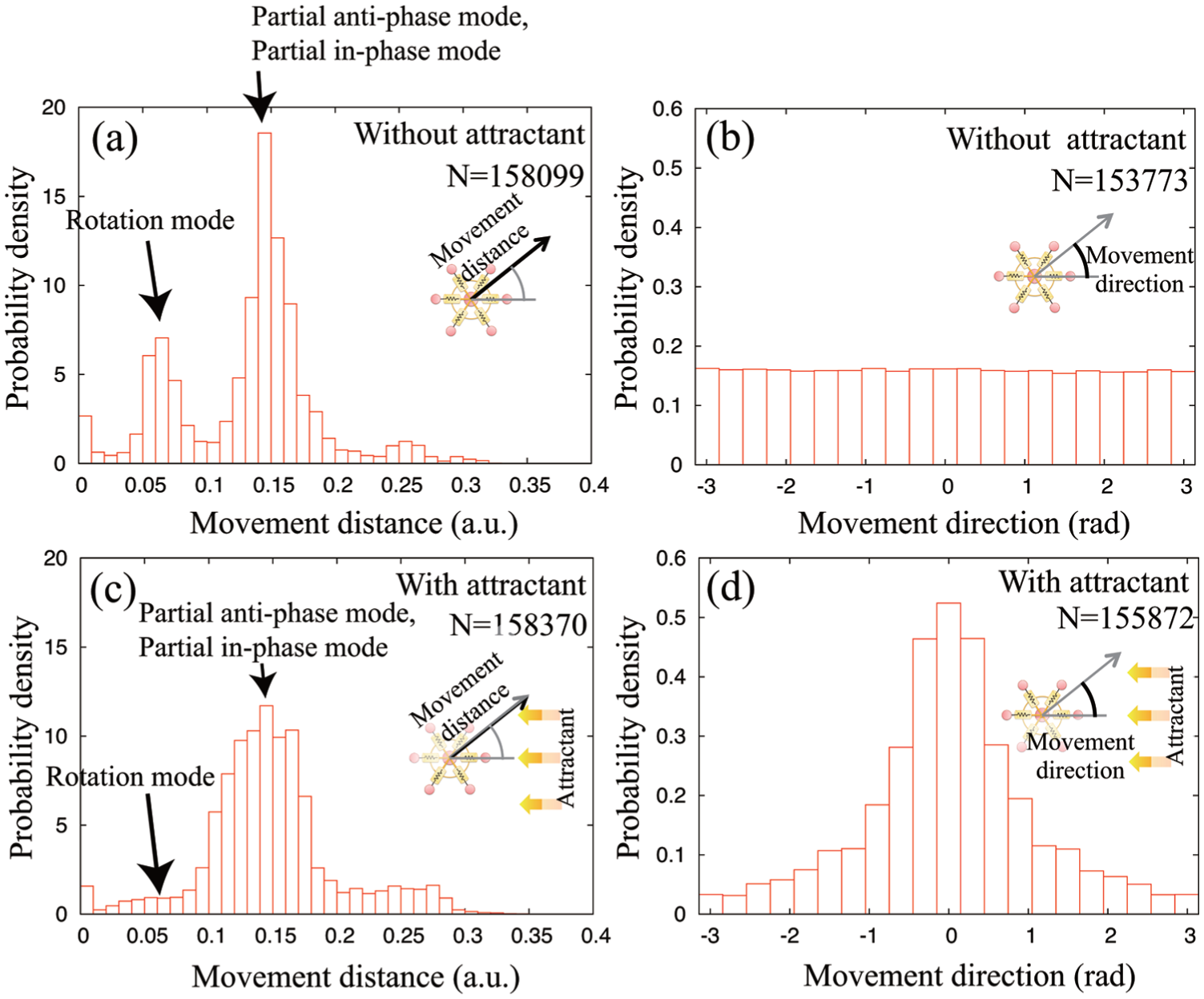
Probability density of movement distance and movement direction of robot during locomotion without (a and b) and with (c and d) an attractant. To draw these plots, the movement distance and the movement direction of the robot were obtained in every period of Φ1 for 100,000 (s). The movement direction (angle) is set as 0 (degrees) when the robot moves toward the attractant, as can be seen in the inset illustration in (d).
Owing to the spontaneous switching between patterns, the histogram of the movement distance per period has several peaks; the largest peak at 0.15 corresponds to a partial anti-phase mode and partial in-phase mode, and a peak at 0.07 corresponds to the rotation mode (Figures 9a, 9c). The peak value in rotation mode is lower than those in partial anti-phase mode and partial in-phase mode because the robot gradually turns around in the rotation mode. The movement direction (angle) is set as 0 (degrees) when the robot moves toward the attractant, as can be seen in the inset illustration in Figure 9d.
Without the attractant, the robot gradually turns around more often in the rotation mode, and it often changes its movement direction drastically while switching modes. Because of the rotation and the sudden change in direction, the histogram of the movement direction without the attractant has a uniform distribution, as shown in Figure 9b. Conversely, with the attractant, the movement direction has a peak in the direction from the attractant, as can be seen in Figure 9d. This indicates that the rotation mode was invoked fewer times with the attractant, which can also be confirmed by the fact that the peak at 0.07 in Figure 9a disappears in Figure 9c.
5 Experiments with real physical robot
5.1 Experimental setup
To confirm the decentralized switching capability of behaviors (i.e., switching between exploratory behavior and taxis locomotion) in the real world, we performed an experiment with the real physical robot. As can be seen in Figure 10a, the robot was placed on iron plates to realize the anchor mode and anchor-free mode with the electromagnets, and an attractant emitter (infrared light) was hung. To do so, the robot could detect the attractant with the infrared sensors in an area termed the attractant area, but it could not detect the attractant in the remaining area. A video was recorded with a video camera to obtain the trajectory of the center joint unit using trajectory tracking software Kinovea. 4
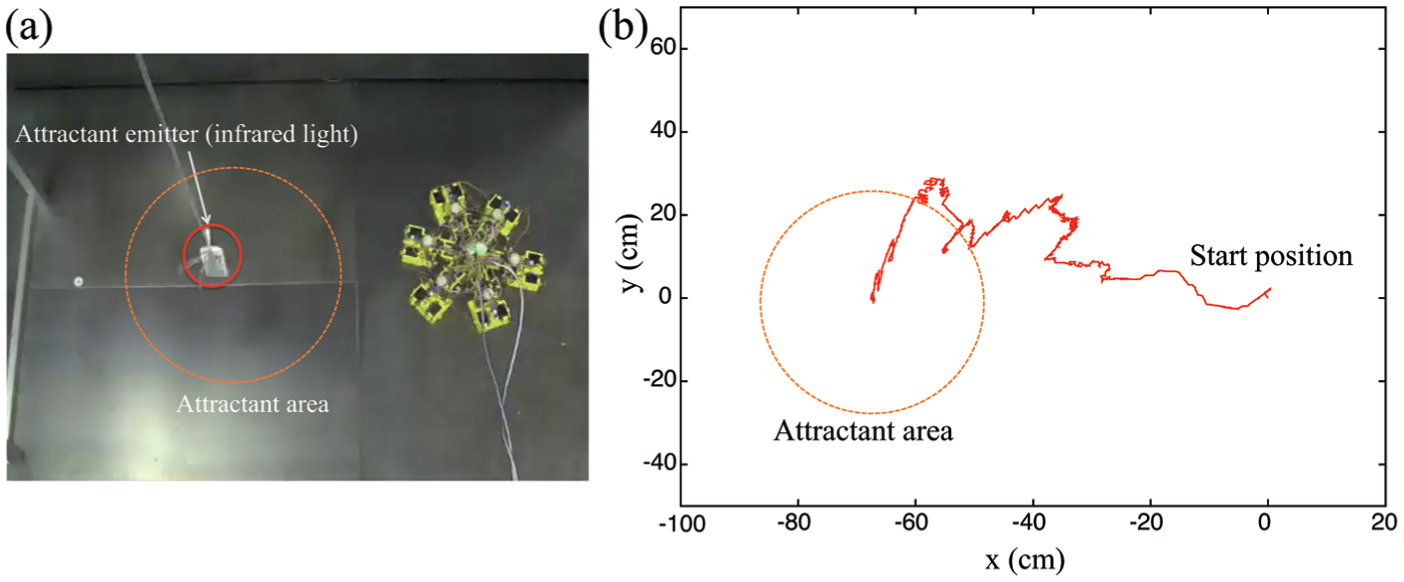
(a) Experimental setup with the real physical robot and (b) trajectory of center of the robot (solid line). The infrared light (attractant) was hung above the iron ground. The dashed circles in (a) and (b) indicate the area that the robot detects the infrared light. The taxis behavior toward the attractant can be confirmed in the experimental data (trajectory in b).
5.2 Experimental result: switching from exploration to taxis locomotion
Figure 10b shows the trajectory of the center of the robot. At the start position, the robot cannot detect the attractant and starts to move around the environment. Once the robot moves to within the attractant area, the soft actuators of the modules that detect the attractant become softer than those of the other modules, and then, the robot moves toward the attractant. It should be noted here that the behavioral switching from exploration to taxis locomotion occurred in a fully decentralized manner; that is, each module locally changed the stiffness of the actuator.
6 Conclusion and future work
We proposed a modular robot that exhibits exploratory behavior and taxis locomotion, and spontaneously switches between them in a fully decentralized manner according to the encountered situation. The validity of the mathematical model implemented in the modular robot was confirmed both numerically and experimentally. The results of this work provide the following new insights into the design of adaptive and versatile behaviors of artificial systems. The first pertains to the emphasis on the mechanical interaction between body parts, instead of designing complex diffusion interactions between oscillators, for generating qualitatively different locomotions and switching between them. The second is related to the design scheme to couple the oscillators via mechanosensory information by exploiting the mechanical interaction between the body parts, which allows the robot to switch its behavior with just a local change in the stiffness of the modules. The results of both the simulation and the experiment clearly indicate that the synergistic effect of phase modification and morphological communication successfully generates versatile yet adaptive locomotion patterns and enables spontaneous switching between them without any neural or electrical communication between the oscillators.
Our future work will focus on investigating a mechanism to induce more useful functionalities by a machine itself (not only the locomotion aspect considered in this paper but also active sensing or long-term behavioral change depending on the environment). We believe that employing mechanical interaction as an interaction manner for coupled oscillators can be a powerful method for designing an artificial system that explores new functions by itself. The reason for this belief is that the mechanosensory-coupled oscillators are always grounded with the real physical world and easily acquire rich sensory feedback from the environment. One promising application of this method is for soft-bodied robots (e.g., Kim et al., 2013; Pfeifer et al., 2012; Trivedi, Rahn, Kier, & Walker, 2008), as mechanical interaction between the body parts is not negligible to control the motion of the soft-bodied robotic systems. As a next step toward achieving our goal, we will implement such a mechanism in a robot constructed with more than six modules, as done in Umedachi, Idei, Nakagaki, et al. (2012), which will allow the robot to deform its morphologies to a considerable extent and negotiate a narrow or complex environment (e.g., rough terrain and complex internal plumbing).
Footnotes
Acknowledgements
The authors are deeply indebted to Ryo Idei, a former graduate student at the Research Institute of Electrical Communication, Tohoku University, and to Ryo Kobayashi, Professor of Mathematical and Life Sciences at Hiroshima University, for their valuable advice and considerable effort in the development of the robot.
Funding
This research was partially supported by the Japan Science and Technology Agency (JST), CREST (JST Mathematics Program, Alliance for Breakthrough between Mathematics and Sciences: ABMS), a Grant-in-Aid for Challenging Exploratory Research (No. 23656171) a Grant-in-Aid for Young Scientists (B) (No. 24740066), and the Tateishi Science and Technology Foundation (No. 2021005).