
Abstract
Soldiers must rapidly decide whether battlefield robots are allies or liabilities, yet most acceptance research relies solely on self-report. We adapted the Robot Implicit Association Test (R-IAT) to capture unconscious evaluations of two remotely piloted Army reconnaissance robots—a tracked Unmanned Ground Vehicle (UGV) and a dog-like quadruped (“Spot”). One hundred thirteen undergraduates completed a seven-block R-IAT, pairing the robot images with positive or negative valence words. Response latencies revealed participants held an implicit preference for Spot over the UGV. Explicit measures did not correlate with R-IAT scores, underscoring the importance of implicit tests for revealing attitudes self-reports miss. Measuring, and designing for, these biases is essential to fielding robots that earn calibrated reliance.
Keywords
Introduction
The Army has fielded semi-autonomous robots that are capable of receiving tactical tasks and maneuvering across the battlefield. These robotic teammates could enhance both soldier capabilities and individual soldier survivability (Endsley, 2015; Szegedi et al., 2017), however designers must create robotic teammates that garner appropriate trust with military service members and demonstrate their utility in mission execution. Previous research in social robotics has shown that both implicit and explicit attitudes impacted decisions made toward robotic usage and acceptance (Lee & Yen, 2023; Young et al., 2009); however, the impacts and implications of these attitudes have not been tested within the military domain.
The acceptance and utilization of novel technology may depend on subjective perceptions and associations (i.e., attitudes) regarding robots—what they are, how they function, and their capabilities (Young et al., 2009). Attitudes toward robots can be categorized as explicit and implicit. Explicit attitudes operate on a conscious level and are generally measured through self-reports, while implicit attitudes rely on unconscious and automatic processes (De Houwer et al., 2009). Previous research indicated attitudes toward robots arose from both conscious and unconscious processes, therefore both types of attitudes can provide unique insights into how people perceive robots (MacDorman et al., 2009). Also, attitudes indicated future behaviors; implicit and explicit attitudes were key predictors in people’s behavioral intentions to use a robot (Lee & Yen, 2023).
Researchers have identified a strong link between people’s previous knowledge about robots and associated robotic acceptance (Arras & Cerqui, 2003), and thus most studies on human-robot interactions have examined explicit attitudes using self-report measures. However, another approach may be to assess implicit attitudes. The implicit theory of cognition suggests that individuals maintain two separate thoughts—implicit and explicit—toward objects of interest (Elsbach & Stigliani, 2019). Implicit cognitions are less susceptible to answers that might be formed by other experiential factors or deliberate self-perceptions (Gawronski & De Houwer, 2014; Lee & Yen, 2023). The Implicit Association Test (IAT) captures associations toward images through participants’ latency in associating words with a set of images. Participants associated positive words toward images they favored significantly faster (MacDorman et al., 2009). The IAT has shown to be particularly adept in social robotics research where it could evaluate even a relatively new robot that participants were unfamiliar with (de Graaf et al., 2016; MacDorman et al., 2009).
A study by Lee and Yen (2023) introduced the Robot Implicit Association Test (R-IAT), a modified version of the IAT, designed to measure implicit attitudes toward service robots. The R-IAT aimed to enhance the understanding of individuals’ unconscious preferences regarding human versus robot service providers. The R-IAT measured users’ preferences for robots and informed strategies for the effective integration and customization of service robots. The R-IAT D-scores were significantly correlated with self-reported explicit attitude measures and behavior intentions, demonstrating the validity of the test. Building on Lee and Yen’s (2023) methodology, the present study adapted the R-IAT to compare users’ implicit preferences for two currently deployed military robotic scouts.
In our study, we explored the connection between the cognitive (explicit attitudes toward robots) and affective (implicit associations) components of people’s attitudes toward robots. We tested our hypothesis that the R-IAT would correlate to explicit attitudes toward a reconnaissance robot with the following specific aims: (1) to determine explicit attitudes toward robots, we used the Nomura et al.’s (2006) Negative Attitude Toward Robots (NARS) Scale and Benton et al.’s (2022) Robot Power Scale (RPS), (2) to determine a relationship between implicit and explicit attitudes, we conducted a correlational analysis using NARS, RPS, and the R-IAT D-score, and (3) to determine a relationship between implicit and explicit attitudes, we conducted a correlational analysis using NARS, RPS, and the R-IAT D-score to determine implicit attitudes toward robots, we used a R-IAT using two pictures of currently fielded Army robots. This initial analysis investigated the connection between the R-IAT in the military domain and trait-level individual differences as measured by NARS and the RPS. Results can assist designers in optimizing the physical attributes of robotic scouts for improved usability and acceptance.
Method
Participants
Replicating Lee and Yen’s (2023) approach, a G-Power analysis (Faul et al., 2009) with a small effect size (d = 0.25) and a power of 0.80, determined a minimum sample size of 101 participants. About 113 undergraduate students (58 women, 55 men) were recruited via the university’s online research participation system. The mean age was 18.70 years (SD = 1.01). Participants received class credit for their participation in the study.
Materials
We gathered self-reported attitudes using NARS and the RPS. The NARS used 14 questions to measure pre-existing attitudes toward robots across three subscales: (S1) Situations of Interaction with Robots (α = .71), (S2) Social Influence of Robots (α = .74), (S3) Emotions in Interaction with Robots (α = .65; Nomura et al., 2006). Participants rated items (e.g., “I would feel paranoid talking to a robot” or “I would feel uneasy if I were given a job where I had to use robots”) on a Likert scale from 1 (disagree) to 5 (agree). A higher NARS score indicated a more positive attitude toward robots.
The RPS evaluated subjective attitudes toward robotic capability across three dimensions, each with established reliability: (1) directed/assistive tasks (α = .87), (2) problem-solving and complex tasks (α = .71), and (3) social interactions (α = .63). Across its three dimensions and 14-items, participants rated items (e.g., “I can work with a robot to complete a task” or “a robot can command me”) on a Likert scale from 1 (disagree) to 5 (agree). A higher RPS score indicated greater comfort with robots in power. Participants completed the NARS, RPS, and then the R-IAT using IATgen software hosted by Qualtrics (Carpenter et al., 2019).
Next, participants were given lists of positive and negative words, introduced to the two reconnaissance robots (Figure 1), and were reminded of the purpose of a military reconnaissance robot to understand its requirements in the military. Participants were briefed that the purpose of a military reconnaissance robot is to move undetected through enemy territory, collect intelligence, and provide assessments of the enemy.
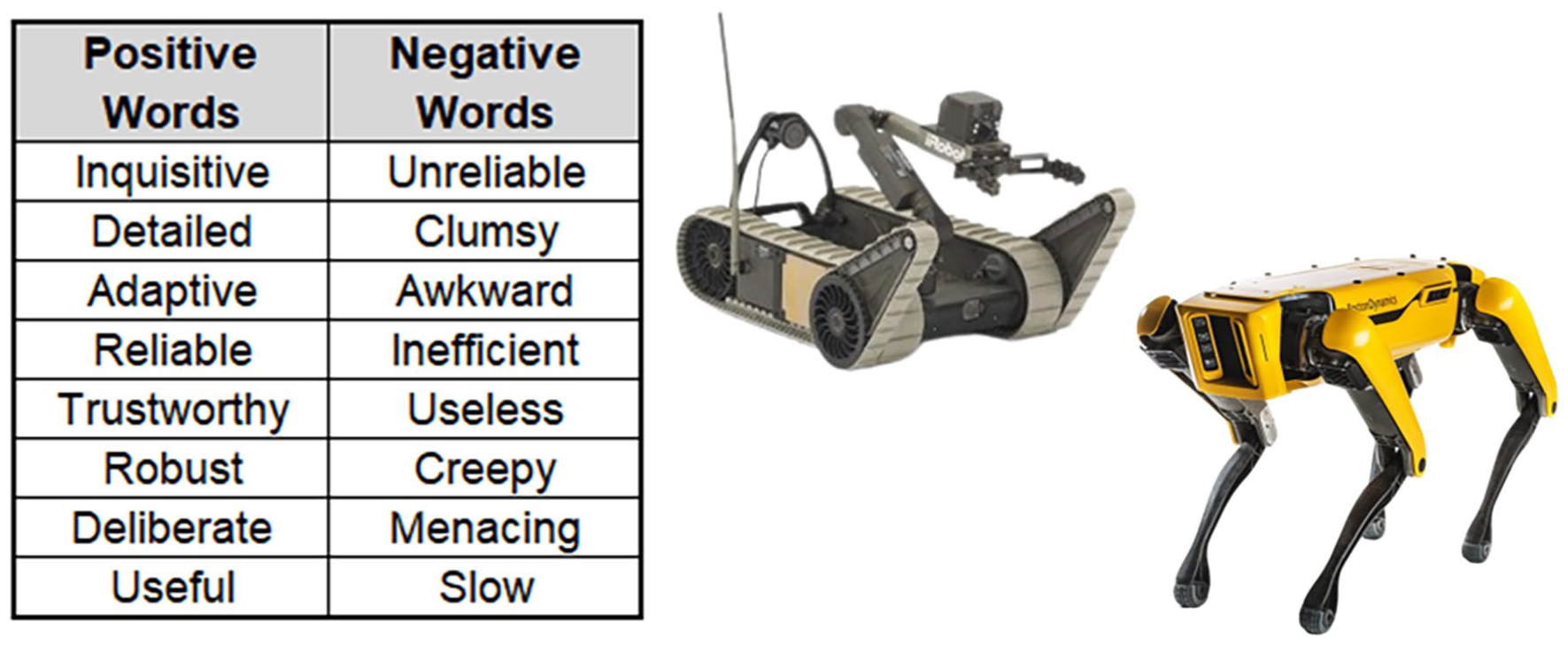
From left to right: (1) the words within the positive and negative categories and (2) pictures of the Unmanned Ground Vehicle (UGV) and Spot.
The R-IAT consisted of seven blocks to measure the degree to which target pairs (robot picture) and categories (positive vs. negative) were mentally associated. Figure 2 illustrates the experimental process, from the valence words, robotic images, and participant responses in the R-IAT. Participants were instructed to categorize each word or image as quickly and accurately as possible.
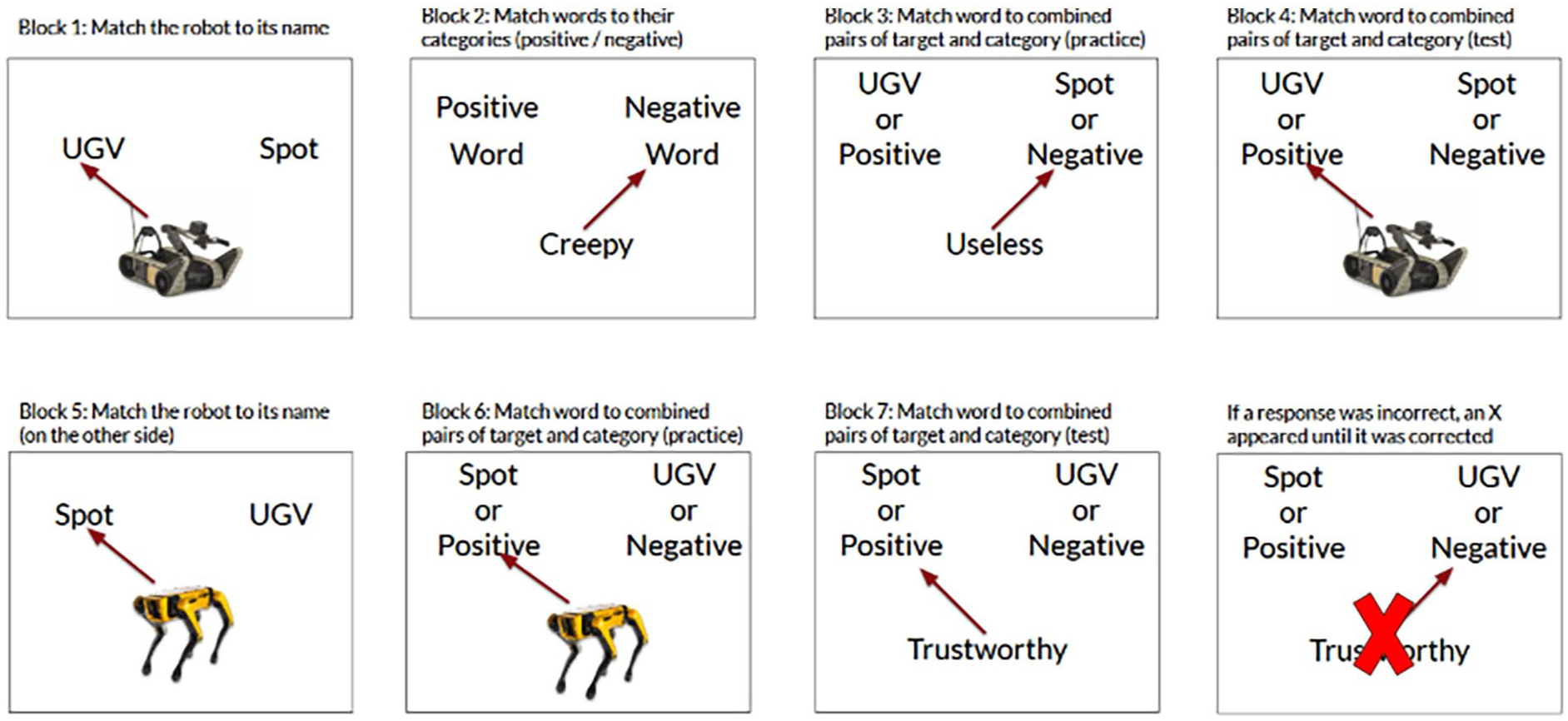
The R-IAT contained seven counterbalanced blocks that assessed the association between target pairs (robot pictures) and categories (positive and negative words). Blocks 3, 4, 6, and 7 were used to generate the D-score.
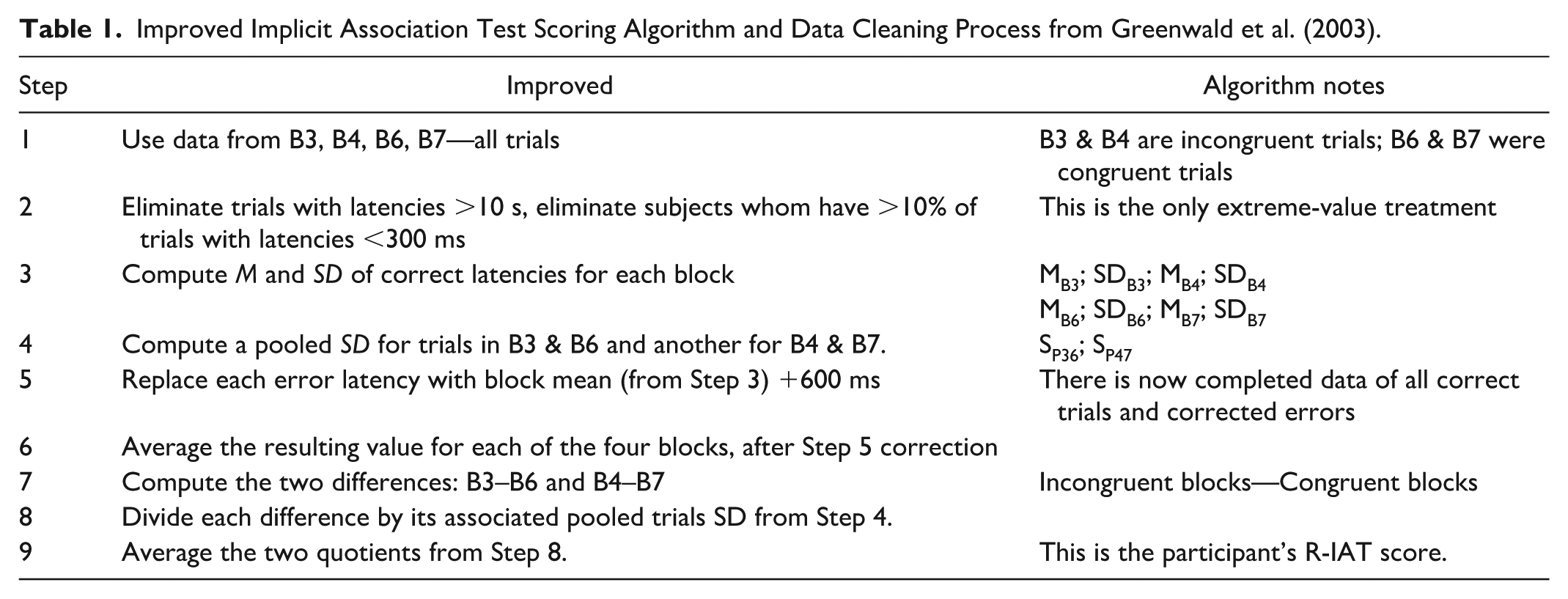
The R-IAT was completed in approximately 10 min. Upon completion, a standardized difference score (D-score) was calculated to reflect participants’ response speeds across different conditions. The IAT data were processed using the improved scoring algorithm outlined by Greenwald et al. (2003), and internal consistency was assessed using Cronbach’s alpha, yielding α = .89. Table 1 lists the improved algorithm’s steps to calculate the R-IAT D score. The higher the D-score, the stronger the association between positive words and Spot; whereas the more negative the D-score, the stronger the association between positive words and the UGV.
Improved Implicit Association Test Scoring Algorithm and Data Cleaning Process from Greenwald et al. (2003).
Design
This experiment employed a within-subjects design. The independent variable was the type of robot presented (images of the UGV vs. Spot). The dependent variable was the D-score, based on participants’ latency of assigning the stimuli to the correct category. The order of the seven blocks that assessed the association between target pairs (robot pictures) and categories (positive and negative words) was counterbalanced to mitigate order effects. Explicit attitudes toward robots were collected using the NARS and the RPS to explore their relationship with the implicit associations measured by the R-IAT.
We hypothesized that Spot’s dog-like features would evoke positive implicit attitudes based on previous experiences with dogs, leading participants to associate positive words more quickly to Spot than the UGV, as indicated by D-Scores. We also hypothesized that there would be a positive correlation between a person’s explicit attitudes, measured by their NARS and RPS, and implicit attitudes as measured by their D-Scores.
Procedure
Participants provided informed consent, then completed a demographic questionnaire and were introduced to the purpose of military reconnaissance robots. Next, they completed the NARS and the RPS to assess their explicit attitudes toward robots. Following this, they were briefed on the introductory materials and took the R-IAT. Upon completion of the R-IAT, participants were debriefed and compensated.
Results
The NARS and RPS scales were coded so that the higher the score indicated a more positive attitude toward robots or robots’ power, respectively. Participants’ NARS scores (M = 2.61, SD = 0.49) indicated a slight negative explicit attitude toward robots in general. The RPS scores (M = 3.25, SD = 0.52) indicated a slightly higher belief that robots have power. A Pearson correlation showed that neither measure of explicit attitude was significantly correlated with the R-IAT D-score: RPS, r = .05, p = .623; NPS, r = −.09, p = .331.
When participants paired Spot with positive words or the UGV with negative words, (M = 877.17 ms, SD = 176.07 ms), response times were significantly faster than when Spot was paired with negative and the UGV with positive (M = 938.68 ms, SD = 199.78 ms), as seen below in Figure 3. As assessed by the D-Score, participants had a positive implicit bias toward Spot compared to the UGV, t(114) = 3.68, p < .001, 95% CI [0.07, 0.25], d = 0.34.
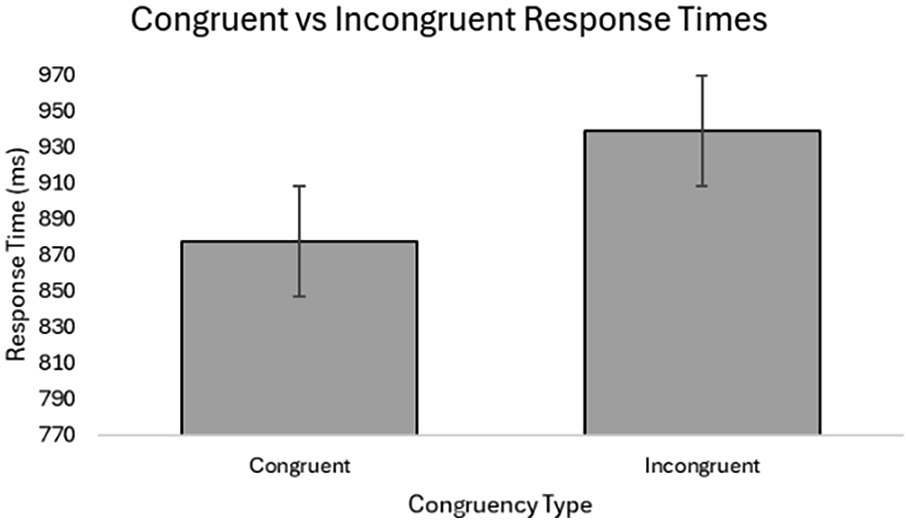
Response times were faster when Spot was paired with positive words and the UGV with negative, compared to the opposite.
Discussion
The present study introduced the R-IAT as a tool for assessing unconscious attitudes toward military robots and demonstrating how those attitudes can guide future Army research and evaluations. Whereas traditional self-report scales are susceptible to conscious biases, the R-IAT captured people’s implicit preferences between two robotic platforms. Participants showed a stronger implicit association with Spot than with the UGV, indicating that the dog-like morphology shaped automation evaluations of robots (Hinds et al., 2004). If such implicit preferences translate into people’s behavior, they carry important ramifications for designing and fielding robotic teammates in the high-pressure military contexts where trust and acceptance are essential. Then, the R-IAT could be used in the military’s initial evaluation procedures for new potential reconnaissance robots.
In contrast to Lee and Yen’s (2023) findings, explicit and implicit attitudes were uncorrelated in our experiment. The R-IAT showed a significant positive implicit bias toward Spot, but there was no correlation with either explicit attitude measure. One likely reason is that our undergraduate participants were unfamiliar with robots on the battlefield, potentially limiting the validity of their explicit reports. Despite describing the roles and responsibilities of a military scout, the mismatch of an undergraduate non-military sample with military stimuli may account for not seeing the expected results. Future studies will need to target tactical military leaders to demonstrate the validity of the R-IAT and continue to explore the relationship between implicit and explicit attitudes within the military domain.
Alternatively, the robots may have appeared too similar to inexperienced participants to elicit distinct evaluations, thereby dampening explicit differentiation despite the observed implicit preference for Spot. The divergent patterns between the NARS (mildly negative) and RPS (modestly positive) scores suggest that individuals may endorse the functional utility or power of robots in specific contexts—such as military operations—even while maintaining generally negative attitudes toward interacting with robots or toward their broader social influence. Another possibility is that participants’ lack of military experience resulted in no specific bias toward any type of battlefield robot; instead, the implicit bias toward Spot may have been driven by a general positive association with dogs. Future research that targets military personnel will allow for a comparison between individuals with and without military experience, helping to evaluate the validity of the R-IAT and potentially support the findings of the current study. This alternative participant pool may also help identify systematic patterns in R-IAT responses and clarify whether a connection exists between implicit and explicit attitudes toward military robots.
Conclusion
Although IATs have not been typically used in military contexts, the R-IAT demonstrated differences in implicit attitudes toward military robots. When comparing two currently fielded robots, participants associated Spot the robot dog with more positive attributes than the UGV, potentially because of Spot’s dog-like features (Hinds et al., 2004). By bypassing explicit attitudes, the R-IAT could offer a novel assessment of robotic attributes. Also, any evaluation comparing robots should include implicit and explicit tests to predict behavioral intentions, robot usage, and robot acceptance (Arras & Cerqui, 2003; Lee & Yen, 2023; Young et al., 2009). Used in combination, these tests may give the most insight into the attitudes that affect the human-robot team.
To address the limitations of this study’s sample, the R-IAT should be tested with military personnel since the test is meant for the military domain. We believe there may be limits to the generalizability of the findings from the non-military trained undergraduates; therefore, a military sample will provide greater insight into the implicit and explicit attitudes of soldiers. Additionally, future research should explore the correlation between implicit attitudes and automation trust and dependence; this exploration of attitudes predicting behavior has important practical applications. As Army units continue to field and onboard new robotic teammates, future studies can investigate how attitudes enable units to trust and depend on their new teammate in a simulated combat situation. Understanding the link from soldiers’ attitudes to their behaviors with a new robotic teammate will enhance the Army’s ability to get the right robot to soldiers on the battlefield.
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.