
Abstract
As automated vehicles (AVs) become more intelligent, the concept of teaming with a semi-autonomous AV has gained considerable traction. However, few empirical studies exist that quantify the performance of an AV-(human) driver team. To contribute to the existing work in this area, the purpose of this study was to examine how the availability of both a vehicle and driver agent, or the unavailability of one agent, influenced teaming in driving. The vehicle’s individual goal: manage the dynamic driving task. The driver’s individual goal: complete a work-related document-editing task. Together, the vehicle would ask the driver about potential roadway dangers and the driver would respond to the vehicle’s queries. Overall, introducing availability allowed for function allocations where drivers had individual goals separate from driving. Study results provide initial insights into operationalizing the future vision of AVs where safety and driver productivity during commutes are maximized.
Keywords
Introduction
Human–Autonomy Teaming (HAT) has gained considerable attention within the last decade. As technology continues to evolve, people and organizations are tasking intelligent, advanced technologies to carry more agency and autonomy in their actions. This is done, in part, to aid and promote more seamless interactions with their human counterparts. This evolution means that the interactions between humans and advanced technologies may begin to resemble more of a teaming relationship, which brings about the critical need to better understand how humans “team” with intelligent agents. Within human-machine collaboration, given that the knowledge and expertise of the human operator may be different from that of the intelligent system, “the highest team performance is often reached when they both know how and when to complement one another” (Ren et al., 2023).
Traditionally, intelligent entities, for example, drones and robots, have been the focal point of investigation within HAT. However, as automated vehicles become more equipped with self-driving features that emulate a teammate, such as Tesla’s Autopilot navigation and Smart Summon (Tesla, 2025), the idea of teaming with a semi-autonomous vehicle, as opposed to viewing it as a tool, is gaining substantial traction.
Background
Lee et al. (2023) propose that a semi-autonomous vehicle (semi-AV) being seen as a teammate could be “a useful perspective for designing highly automated vehicles” for improving the overall design of semi-AVs. In their review article, a framework for HAT in the driving context is discussed that views the driver-automated driving system (DADS) teaming dynamic through three concepts critical to the teaming relationship: Coordination, Cooperation, and Collaboration. The authors propose that adopting a teaming perspective can potentially lead to safer roadway operations, since drivers may better understand their roles and responsibilities in this dynamic partnership.
However, to date, few empirical studies exist that quantify the performance of an AV-(human) driver team. To contribute to the existing work in this area, this study examines how the (un)availability of a vehicle and/or driver agent influences individual and teaming measures in driving. Particularly, this study takes first steps towards assessing teaming between a human driver and a vehicle equipped with Society of Automotive Engineers (SAE) L3 conditional automation, which can perform part or most, respectively, of the “dynamic driving task (DDT) on a sustained basis” (SAE, 2021).
Approach
An in-lab driving simulation study was conducted to answer the following research question: Can the (un)availability of a driver and/or vehicle influence teaming perception and performance in an automated driving context? Data from 14 participants (Mean age = 25.57 years; two Female) was collected (IRB # 2020-755). Inclusion criteria required each participant to have had previous experience driving a semi-AV at least once. This study used a Driving Safety Research Institute (DSRI) fixed-base medium-fidelity driving simulator, miniSim™. There was an additional touchscreen monitor integrated to serve as an in-vehicle infotainment display.
Participants were asked to commute to and from work while riding in a semi-autonomous vehicle with SAE L3 capabilities. The road environment was a three-lane highway with a roadway topography consisting of mainly flat segments with occasional hills. There was mild traffic present with a series of construction sites along the commute. Each construction site was either active or inactive, that is, workers present/not present. During their commute, the driver and vehicle agents had a shared task of arriving to and from work timely, while safely navigating all construction work sites and the overall driving environment. The vehicle occasionally asked the driver about potential roadway dangers via visual question prompts, and the driver responded to the vehicle’s queries via touch input on the infotainment display. Given the time-sensitive nature of navigating the roadway, if the driver did not respond before a set distance from the construction site, the vehicle made its own decision regarding how to proceed. Additionally, individual goals of the vehicle and driver varied. The vehicle’s goal was to successfully manage the dynamic driving task. The driver’s goal was to complete a work-related document-editing task.
The independent variable (see Table 1 for more details) was driver/vehicle availability, which consisted of three levels: (1) the driver and the vehicle were both available (DVa), (2) the driver was available, but the vehicle could not be (Vu), or (3) the vehicle was available, but the driver chose not to be (Du).
Independent Variable (Three-Levels): Agent Availability Status.
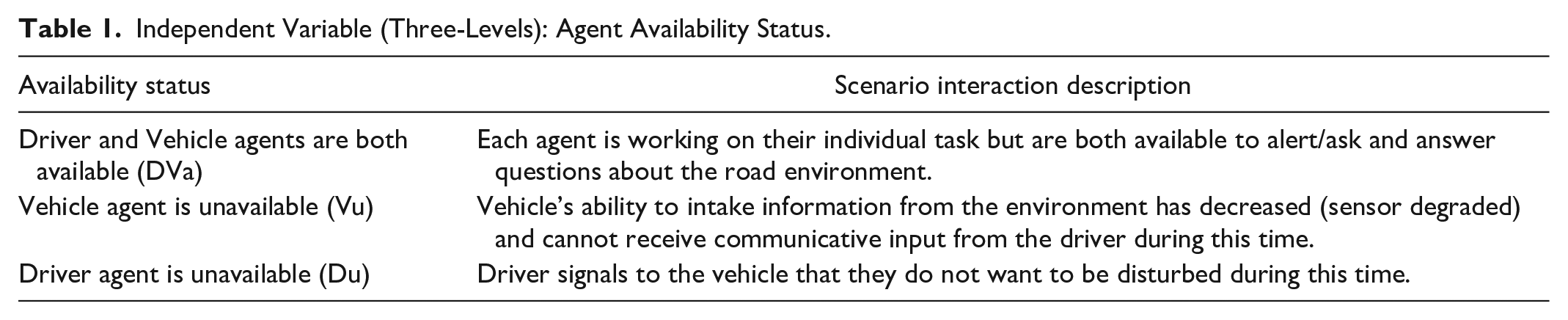
Here, vehicle unavailability resulted from environmental sensing degradation due to dense fog, while driver unavailability was determined by the experimenter but set by the driver. The availability status of the driver and vehicle was controlled via the infotainment touchscreen display.
This paper reports preliminary findings from select analysis. Dependent measures include: voluntary takeover observations, driver perception of the semi-AV as a teammate before and after the interaction, driver trust in the semi-AV before and after the interaction, driver preference for availability status, and team communication effectiveness (drivers’ correct input vs. vehicle’s receipt of drivers’ input). All analyses included descriptive (percentages) and qualitative trends/themes. Given the preliminary nature of the results, no statistical analysis was conducted.
Outcome
Of the 14 drivers, 11 decided to take control of the vehicle at least once, with the highest number of takeovers within the Vu availability status and lowest in the Du availability status. When the vehicle was unavailable, drivers regained control of the vehicle 45% of the time. Participants were asked about their perception of teaming before and after their interaction with the vehicle. Figure 1 illustrates the changes in perception status. Trust was similar before and after the interaction, with only a 4.6% increase. Drivers felt the teaming dynamic the most (79%) when the vehicle asked for their input to aid in its decision-making (vehicle’s inquiries about the environment—DVa), and secondly (57%) when they were able to do work uninterrupted while the vehicle drove (Du). During the DVa availability status, drivers answered the vehicle’s queries with 93% accuracy in assessing the environment, but given the time sensitivity of the input, the vehicle received the driver’s input only 64% of the time. Having individual goals during the driving experience was associated with an overall sense of being more efficient during the drive.
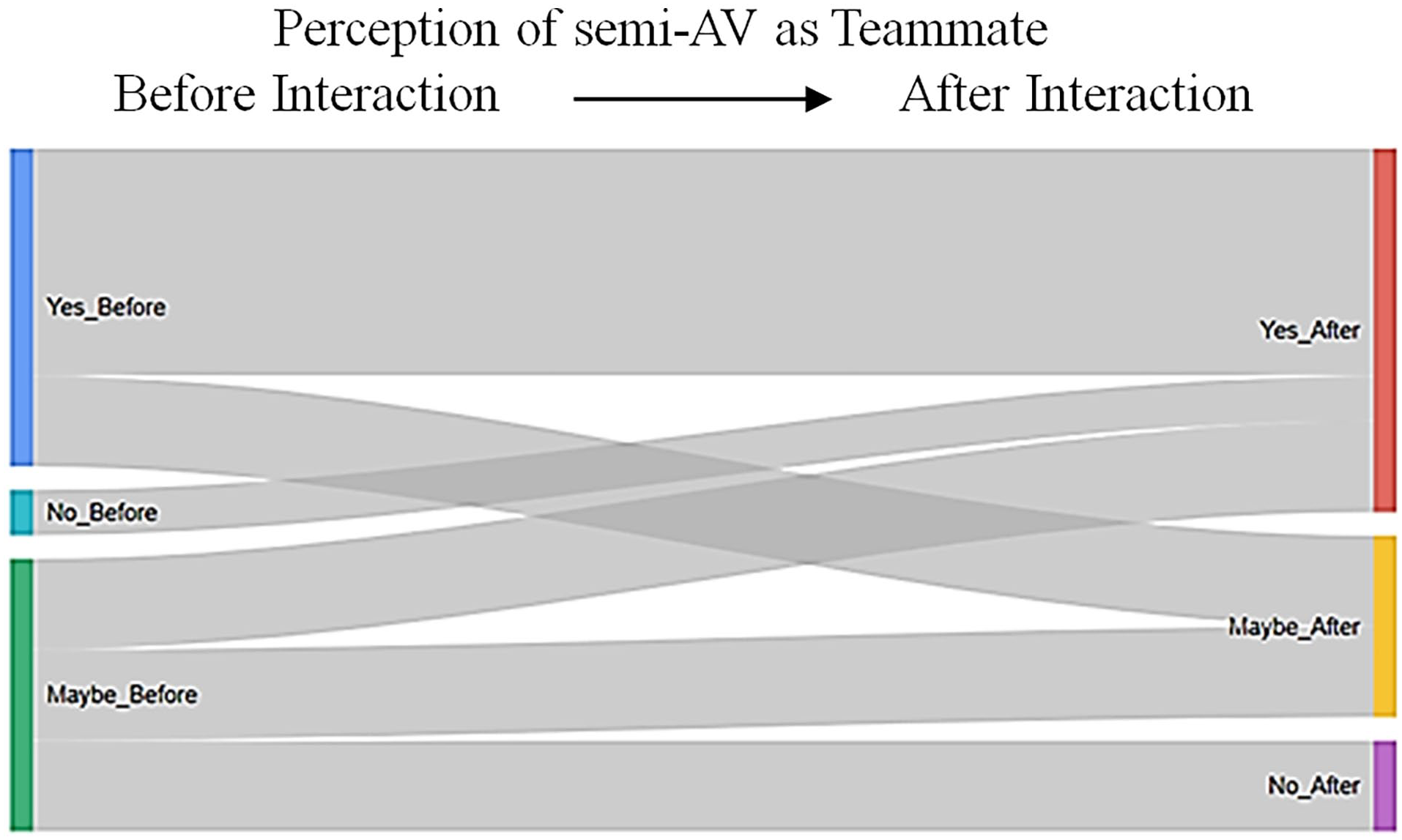
Alluvial plot depicting the perception of the semi-AV as a teammate before and after driving interaction.
Conclusion
Preliminary findings from this research are expected to contribute to the knowledge base in HAT by providing an understanding of drivers’ perspectives and behaviors regarding teaming with an autonomous vehicle both now and in the future. Driver/vehicle availability afforded the opportunity to complete individual goals, which was associated with a sense of drive efficiency and a positive shift in the perception of the semi-AV being the driver’s teammate. Also, communication between the driver and vehicle was associated with an overall sense of teaming, and is known to be an important factor in effective teaming (Lee et al., 2023). However, further investigation is needed to determine how to do so effectively. Although the number of voluntary takeover instances was the highest when the vehicle was unavailable, rather than viewing this situation as a failure, participants perceived it as “stepping in” to aid the vehicle in navigating the environment. Srinivasan and Takayama (2016) found that people are more willing and quicker to help a robotic system if they believe that the robot is working autonomously. In other words, if they believed that there was no other human available to help the robot, but understood the robot was not infallible, they would be more willing to be the “human helper.”
This study limitations include: a limited sample size, convenience sampling, and drivers with some, but limited, experience with semi-AV interactions. Also, given that this study represents ongoing efforts, inferential statistical analysis as well as additional formal thematic coding for subjective findings will be included in future analysis and dissemination. Nonetheless, these study results can be used to understand the current mental models of drivers of vehicles with SAE L3 capabilities and their willingness to adopt behaviors toward the perspective of teaming with their vehicles. This work can also be used to aid AV designers in developing improved in-vehicle communications that support drivers in understanding and executing their roles within the DDT.
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by a grant from the National Science Foundation (NSF grant #1836952; Program Manager: Dr. Sylvia Spengler).