
Abstract
This study investigates prosocial behavior—actions benefiting other road users—increasingly important in traffic environments with diverse mobility options and autonomous technologies. Despite growing relevance, research lacks empirically-validated definitions connecting behavioral metrics to perceived prosociality. Using a 2 × 2 within-subjects design, we simulated pedestrian interactions varying in coordination demands, time pressure, and spatial constraints to elicit prosocial responses. Analysis of behavioral metrics, linguistic patterns, and time-series features revealed three prosociality dimensions: movement adaptation, spatial coordination, and prosocial awareness. Slower speed at minimum pedestrian proximity reliably predicted higher prosociality. Rapid speed variation, pattern complexity, and frequency of acceleration-deceleration shifts emerged as top predictors of prosocial intent, yielding 75.8% classification accuracy. Our findings establish a behavioral-perceptual framework linking driving patterns to perceived prosociality in traffic environments.
Introduction
Prosocial behaviors—actions intended to benefit others—assume increased importance in hybrid societies where autonomous technologies and human interactions coexist in public spaces (Harris et al., 2014; Persons et al., 2010; Sauer et al., 2019). As transportation systems evolve to accommodate an increasingly diverse range of mobility options, from traditional vehicles to e-bikes, e-scooters, and automated vehicles, the complexity of road user interactions has grown. While traffic systems operate within strict regulatory frameworks, many situations require informal coordination through non-compulsory means. In such situations, prosocial behavior manifests through actions that promote effective cooperation among drivers, passengers, pedestrians, and cyclists, fostering more efficient, less stressful, and inclusive transportation experiences (Harris et al., 2014; Vella-Brodrick et al., 2013). These behaviors are particularly crucial in hybrid mobility societies where cooperative interactions can mitigate the challenges of integrating autonomous vehicles and human-operated systems. Micromobility interactions provide an ideal context for examining prosocial behavior, as riders participate in direct, unmediated exchanges with fellow road users and behavior is not coordinated by lanes and traffic control devices (Domeyer et al., 2020). The communicative transparency and lack of external control reveal prosocial behavior that is obscured in conventional driving scenarios.
Despite its growing relevance, research on prosociality in traffic remains limited in its fundamental understanding and measurement approaches. Although studies have explored various aspects of prosocial driving, they have yet to establish an empirically validated definition in traffic contexts (Harris et al., 2014; Knobel et al., 2013; Liu et al., 2021; Sadeghian et al., 2020; Ward et al., 2020). This fundamental limitation stems from relying on broad social psychology theories without investigating how road users perceive and interpret prosocial behaviors in actual traffic situations. A particularly challenging aspect of prosocial behavior in traffic environments lies in its inherently contextual and situated nature. The perception of what constitutes prosocial behavior depends on ego-centric perspectives, environmental factors, and cultural norms, rather than solely on the objective characteristics of interactions initiated by others. This perceptual complexity creates substantial challenges for developing universal standards for prosocial traffic behavior, especially in increasingly diverse transportation ecosystems (Schwarting et al., 2023).
To address these gaps, we conducted controlled experiments in simulated traffic environments, examining road users' responses to interdependent shared space conflicts under cooperative and non-cooperative conditions (Kim et al., 2024). Prosocial behavior frequently emerges when road users must coordinate in constrained situations; therefore, we designed traffic scenarios with varying spatial and temporal limitations to examine how different interdependence levels affect cooperative behavior. Our investigation centered on two primary research questions:
How do road users perceive prosocial behaviors in traffic situations?
What behavioral metrics reliably indicate such behaviors?
We hypothesized that prosocial behavior is reflected in how actions are executed, with drivers' behavioral metrics predicting their prosocial intentions. This study seeks to develop an empirically grounded definition that captures the contextual and behavioral dimensions of prosocial behavior in dynamic transportation environments.
Background
Understanding prosocial behavior in traffic environments has evolved through significant contributions in transportation research. The Prosocial and Aggressive Driving Inventory (PADI) introduced a framework defining prosocial driving as behaviors that protect others' well-being and promote cooperation (Harris et al., 2014). PADI developed its measurement items from aggressive driving behavior scales and DMV safety guidelines, establishing an initial approach to quantifying driving behavior through a safety-oriented perspective.
This foundation has been extended through research exploring the relationship between prosocial attitudes and driving behaviors, using both explicit and implicit measures to reveal distinct behavioral adaptations in complex traffic scenarios (Liu et al., 2021a). As transportation systems advance, research has expanded to examine prosocial behavior across diverse traffic contexts. The interaction between vehicles and vulnerable road users has emerged as a critical domain for understanding prosocial driving behaviors (Ward et al., 2020), while the effectiveness of communication cues in automated vehicle-pedestrian interactions has opened new directions for promoting prosocial behavior (Sadeghian et al., 2020). Observation of safe driving behavior has revealed how drivers engage in cooperative interactions across different traffic situations (Knobel et al., 2013).
A critical gap in current understanding relates to how prosocial behaviors are perceived by different road users. Recent research highlights that prosocial behavior in traffic is not uniformly perceived but is shaped by contextual factors and individual interpretations (Kaye et al., 2022). Engagement in prosocial and altruistic behaviors among road users varies based on situational demands, internalized social norms, and perceived moral obligations. These subjective filters influence how behaviors are interpreted and whether they are labeled as prosocial, even when the observable actions are similar. As such, establishing universal behavioral markers of prosociality in traffic remains challenging due to the variability in perception across individuals and scenarios.
Current understanding still relies primarily on predetermined social psychology theories and safety-oriented definitions rather than traffic-specific empirical evidence of how prosocial behavior is perceived and experienced by road users. Additionally, there has been limited investigation into critical thresholds in prosocial behavior—points beyond which additional prosocial actions yield diminishing or even negative returns in traffic contexts. This study addresses these gaps by investigating how road users interpret, experience, and exhibit prosocial behaviors in dynamic traffic situations, contributing to a more nuanced understanding of prosociality in transportation environments.
Method
Participants
Participants (N = 30; 18 males, 12 females; age range: 18–53 years, M = 34.1, SD = 8.9) were recruited via Prolific, with inclusion criteria required that participants drive a minimum of 2,000 miles per year and possess a valid driver’s license for at least 2 years to ensure traffic rule familiarity). Participants were compensated $12.00 for 1 hour of participation. The study protocol was approved by the Institutional Review Board at University of Wisconsin–Madison.
Experimental Design
The study used a 2 × 2 within-subjects mixed design to investigate how participants perceive prosociality and behave in response to cooperative versus non-cooperative interaction scenarios in traffic situations. Cooperative scenarios featured pedestrians making eye contact, hesitating, and using clear stopping gestures before yielding. Non-cooperative scenarios showed pedestrians proceeding without acknowledgment. The design incorporated two levels of environmental constraints: (1) High-constraint: 4-second green light with spatial obstacles and (2) Low-constraint: 10-second green light without obstacles. This design tested how time pressure and space limitations affect prosocial perceptions and actions. High-constraint conditions forced quick decisions with limited resources, creating interdependency between drivers and pedestrians. Low-constraint conditions reduced coordination pressure, allowing more response options.
Figure 1 shows the experimental setup: non-cooperative scenarios (top) with pedestrians maintaining their path, cooperative scenarios (middle) with pedestrians pausing to let vehicles pass, and additional constraints (bottom) featuring narrower passages and timing limitations. All scenarios used invisible boundaries for consistent pedestrian interactions.
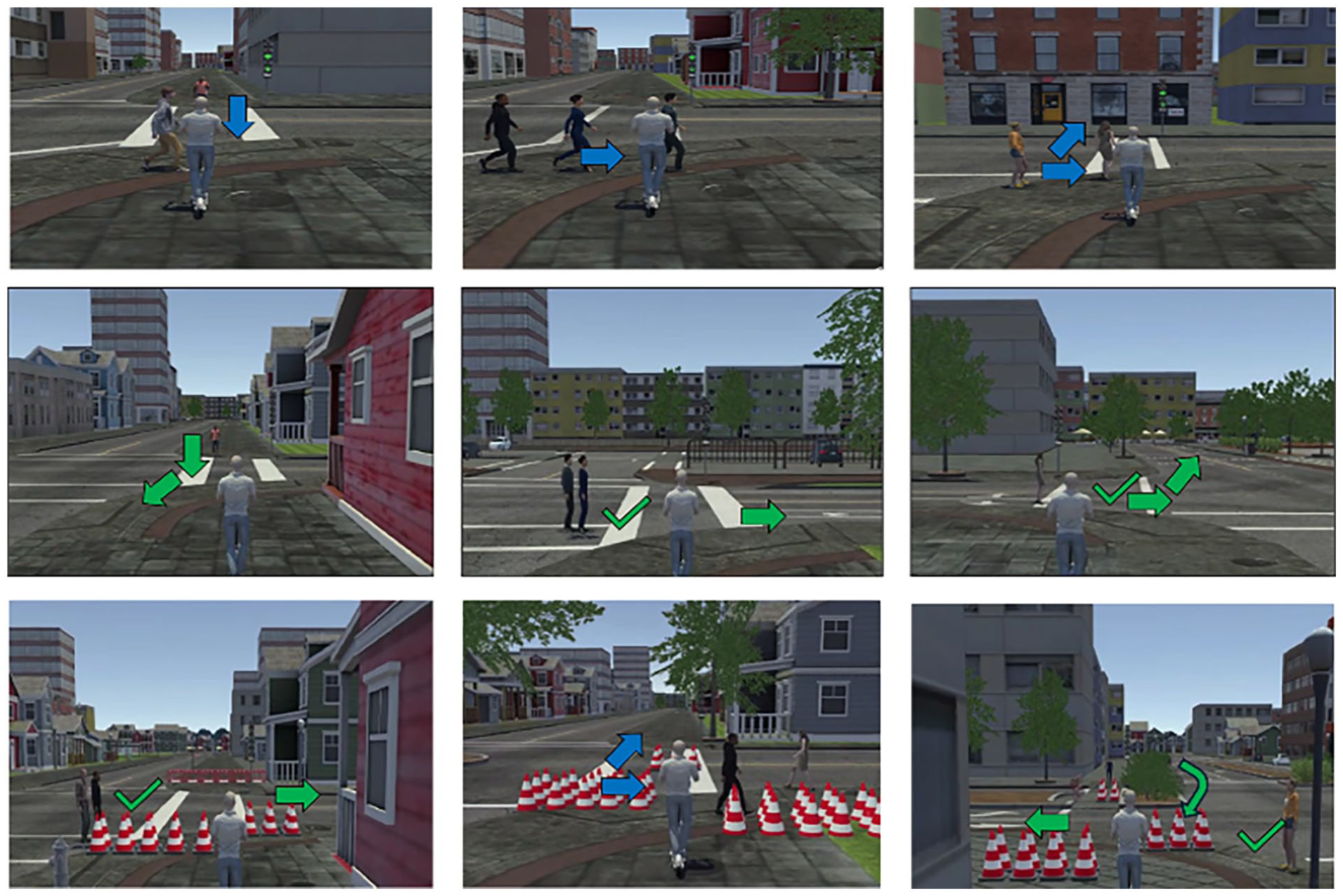
Experiment Scenario descriptions.
Procedure
The study used a web-based Unity simulator (v3.4.2) to create a suburban setting. Participants completed 16 traffic scenarios (eight cooperative, eight non-cooperative) with pedestrians. After each interaction, they rated “How prosocial was this pedestrian?” and “How prosocial were you toward this pedestrian?” (1 = Not at all, 7 = Very), and provided written narratives answering “What did they do? And what did you do and why?” Key behavioral metrics included minimum gap distance, speed at minimum gap, wait time, deceleration time, distance traveled, and scene completion time.
Measures
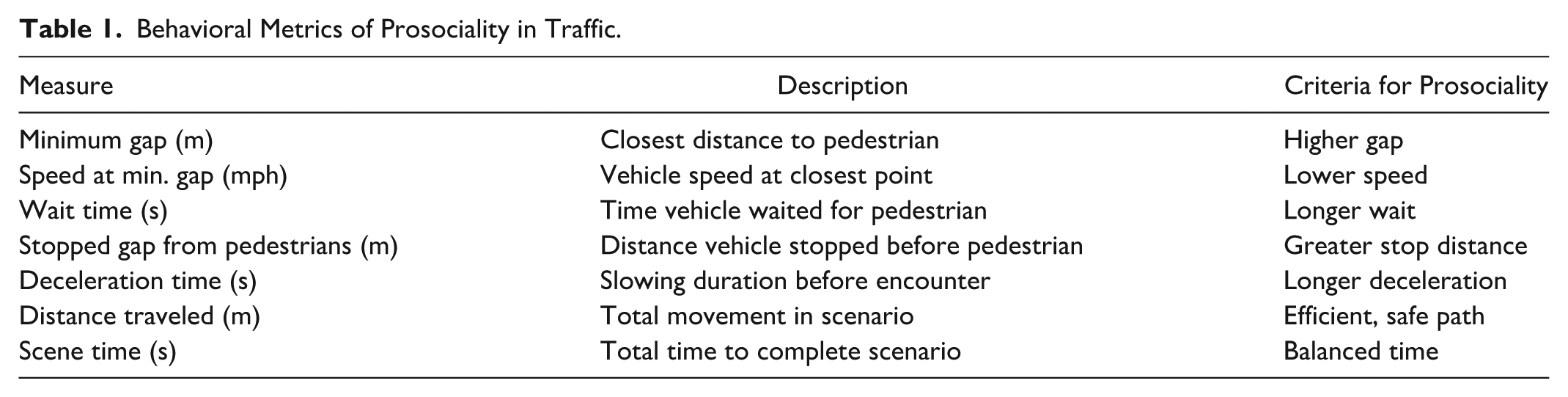
Table 1 shows behavioral measures collected during traffic scenarios with corresponding criteria for prosocial behavior assessment (Haas, 2014; Rasouli & Tsotsos, 2019; Schwarting et al., 2019). This theory-driven set of measures was complemented by a data-driven set derived from Catch22.
Behavioral Metrics of Prosociality in Traffic.
Analysis
We applied three analysis methods. First, an exploratory XGBoost classifier (Chen & Guestrin, 2016) was trained to predict high vs. low giving prosociality using 44 Catch22 time-series features extracted from speed and acceleration signals (Lubba et al., 2019). Second, thematic analysis was conducted on participants’ free-text responses using Python (Braun & Clarke, 2006; Manning et al., 2008). Third, linear mixed-effects models using the lme4 package in R examined how behavioral metrics related to prosociality ratings across scenarios (Kuznetsova et al., 2015).
Results
Analysis of driving behavior across 30 participants, each exposed to 16 traffic interaction scenarios, was conducted to identify behavioral and perceptional predictors of prosociality.
Prosociality Emerges from Catch22 Driving Patterns
We used the Catch22 framework (Lubba et al., 2019) to extract 44 time-series features from participants’ behavioral data. This included 22 canonical features extracted from rider speed (SpeedMPH) and another 22 from acceleration/deceleration intent, capturing properties such as speed variability, fluctuation frequency, and temporal rhythm. Next, we trained an XGBoost classifier to identify which features best distinguished high (ratings ≥ 6) versus low (ratings ≤ 2) prosociality, omitting mid-range responses. The model was tuned across eight hyperparameters using the caret package (Kuhn, 2008) and achieved optimal performance with nrounds = 50, max_depth = 2, eta = 0.01, gamma = 0, colsample_bytree = 1, min_child_weight = 1, and subsample = 1. This conservative configuration suggests that prosocial tendencies can be effectively detected from low-level behavior using simple, shallow trees.
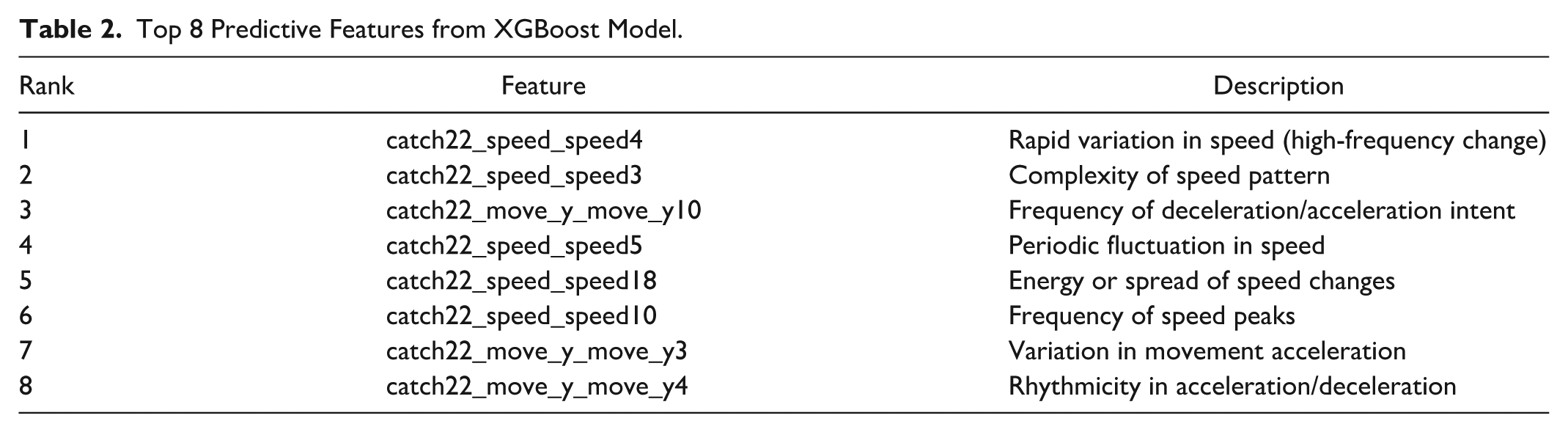
The final model achieved 75.8% accuracy, with high sensitivity (98.1%) but low specificity (17.7%), reflecting a class imbalance in prosociality distribution. Feature importance revealed that rapid speed variation and speed complexity were the most predictive features. The full list of top-ranked 8 features is shown in Table 2 and Figure 2 and 3.
Top 8 Predictive Features from XGBoost Model.
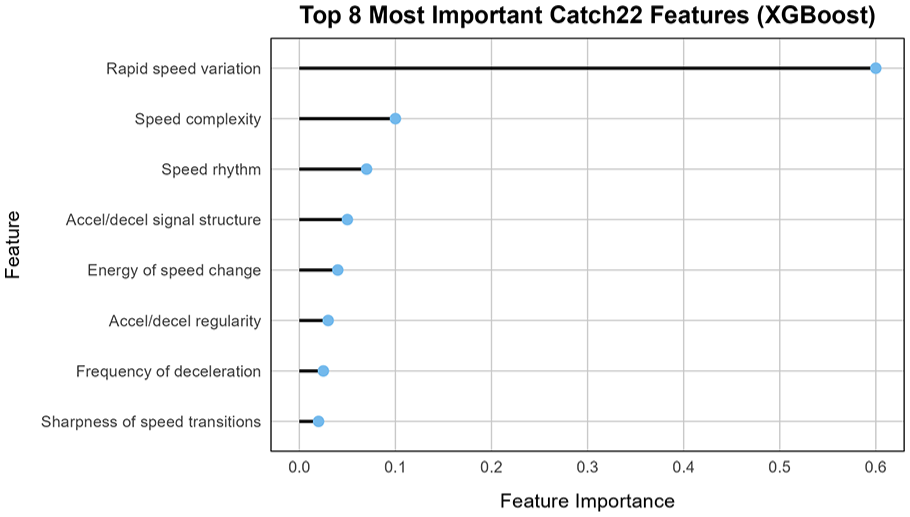
Top 8 most important Catch22 features (XGBoost).
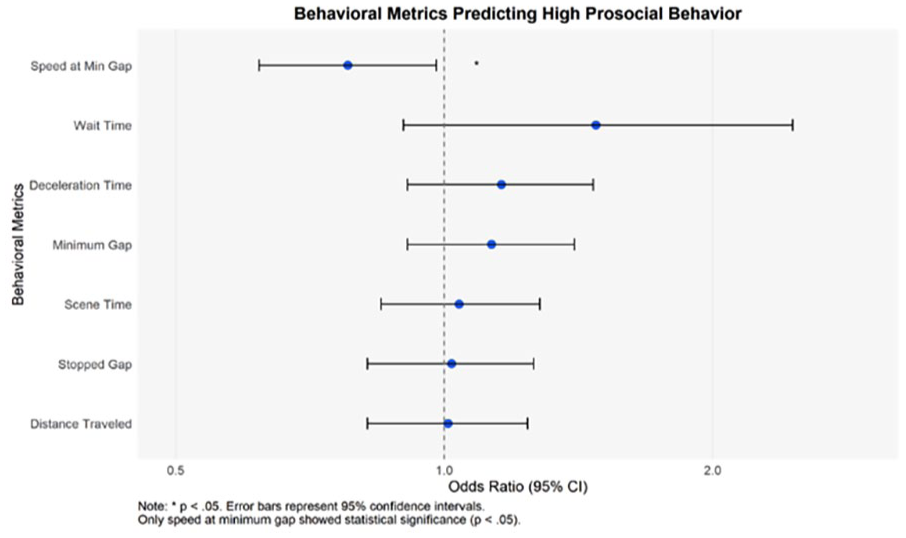
Odds ratios and 95% confidence intervals for behavioral metrics predicting high prosocial behavior. Only speed at minimum gap showed a significant effect (p < .05).
These results suggest that prosocial riders exhibit more varied and temporally patterned speed and acceleration profiles, reflecting how self-rated prosociality may be expressed through subtle riding behaviors in interdependent driving contexts.
Also, a logistic regression model revealed that Complexity of speed pattern significantly predicted scenario type (β = −.113, p < .001), with Frequency of deceleration/acceleration intent contributing significantly (β = −.011, p < .05), suggesting that participants in asocial (high interdependence) interactions exhibited more complex and reactive driving behavior.

These findings were validated by a random forest model (accuracy = 75.3%), which identified two features as the most important predictors of scenario type, reinforcing the idea that frequent speed adjustment and deceleration are robust indicators of asocial traffic dynamics.
Text-Based Markers of Prosocial Behavior
We applied Term Frequency–Inverse Document Frequency (TF-IDF) analysis to 784 textual responses describing mobility interactions. TF-IDF evaluates how distinctive a term is within a document relative to the entire corpus:
TF(t,d) = frequency of term t in document d, normalized by total terms
DF(t,D) = log of total documents divided by number of documents containing t

To test differences between high and low prosocial categories, we used chi-square tests (α = .05).
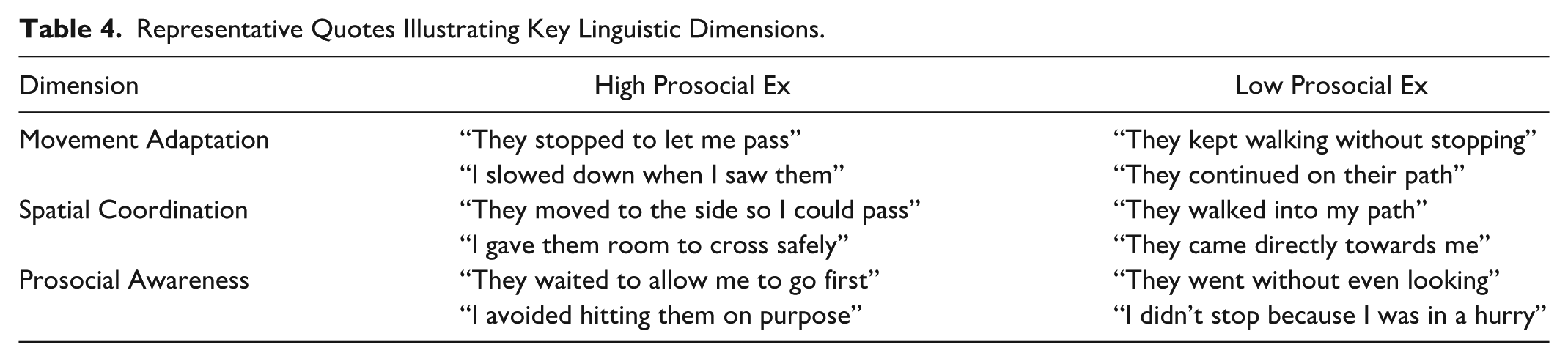
Text mining of 784 mobility interaction reports identified three key linguistic dimensions—Movement Adaptation (χ² = 105.2, p < .001), Spatial Coordination (χ² = 43.7, p < .001), and Prosocial Awareness (χ² = 38.2, p < .001) —that distinguish high from low prosocial behaviors using TF-IDF analysis. In Table 3, high prosocial responses included terms like stopped (0.186), pass (0.121), and allow (0.103), signaling intentional yielding and spatial consideration, while low prosocial cases featured kept (0.100), path (0.065), and because (0.086), indicating continuation or self-justification. Table 4 presents example quotes from high- and low-prosocial responses to illustrate the key linguistic characteristics of each dimension. These findings align with sociolinguistic and computational frameworks (Chen & Williams, 2024; Wilson & Brown, 2023), confirming that intentional adaptation and harm prevention are central to prosocial expression in shared mobility.
Primary Linguistic Dimensions with Key Terms and Statistical Significance.
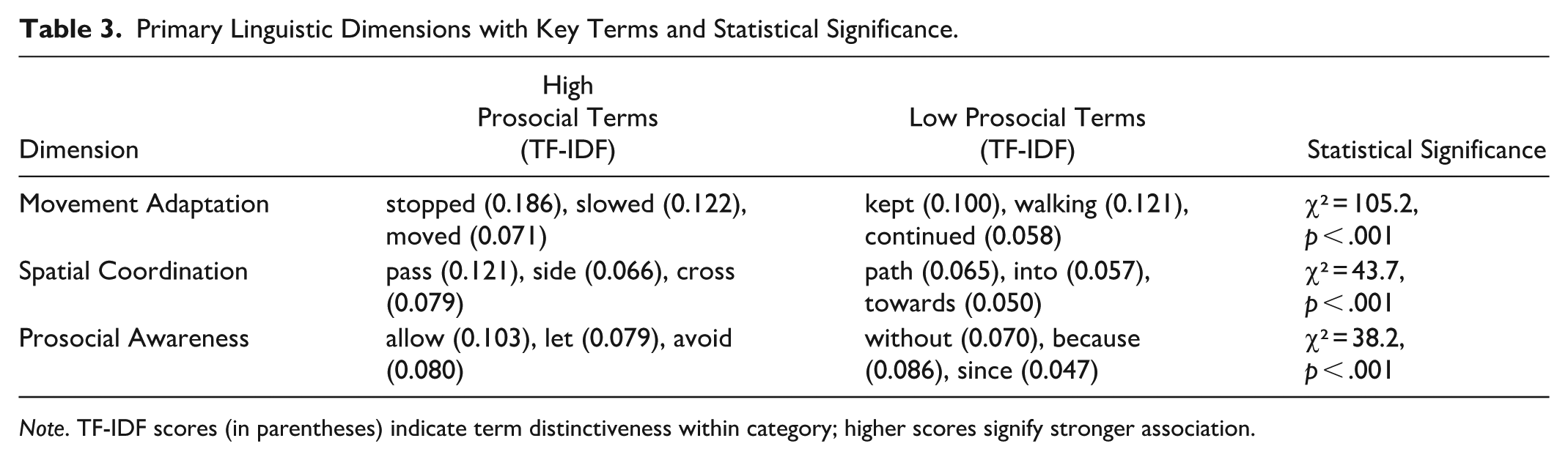
Note. TF-IDF scores (in parentheses) indicate term distinctiveness within category; higher scores signify stronger association.
Representative Quotes Illustrating Key Linguistic Dimensions.
Behavioral Metrics Reveal Speed as Prosocial Indicator
A generalized linear mixed model (random intercepts by participant) identified speed at minimum gap as a significant predictor of high prosocial behavior (ratings ≥ 6), odds ratio = 0.78, 95% CI [0.62, 0.98], p < .05.

Slower speeds near pedestrians were associated with increased likelihood of prosocial responses. Model comparison confirmed improved fit over the null model, χ²(1) = 4.68, p < .05, ΔAIC = –2.69. Other measured metrics, including wait time, deceleration time, and distance traveled, did not demonstrate statistically significant relationships with prosocial ratings.
Conclusion
This study defines prosocial behavior in traffic by linking road users' perceptions to measurable behavioral indicators. Through mixed-method approach, we identified three key dimensions of prosocial behavior: movement adaptation, spatial coordination, and prosocial awareness. Movement adaptation emerged as the most salient dimension, with speed at minimum gap serving as a significant predictor of prosociality (odds ratio = 0.78, p < .05). Our Catch22 time-series analysis with XGBoost classification (75.8% accuracy) further established that rapid speed variation, pattern complexity, and acceleration-deceleration shifts effectively predict prosocial intent.
These results contribute to transportation research by establishing a behavioral-perceptual framework for understanding prosocial behavior in increasingly diverse mobility environments. As transportation systems evolve to incorporate autonomous technologies alongside traditional vehicles, e-bikes, and e-scooters, this framework provides a foundation for assessing interactions where traffic flow and safety depend on coordinated behaviors (Fraade-Blanar et al., 2025). Our findings suggest that prosocial behavior manifests not just in actions performed but in their temporal and spatial execution.
While our study contributes valuable insights, several limitations should be acknowledged. The web-based simulation environment may not fully capture real-world traffic complexity, and our focus on rider-pedestrian interactions may not address all traffic scenarios. Future research should implement studies in more immersive environments, explore cross-cultural comparisons, and examine how prosocial behaviors evolve with driving experience and changing traffic contexts.
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Honda Research Institute USA, Inc. Grant No. POHRI-004483. We thank members of the University of Wisconsin-Madison, Cognitive Systems Laboratory for their insightful discussion and comments.