
Abstract
In recent years, magneto-rheological (MR) dampers have been used to control the response of structures. This paper presents the design and application of an H∞ fault detection and isolation (FDI) filter and fault tolerant controller (FTC) for truss vibration control systems using MR dampers. A linear matrix inequality formulation is used to design a full order robust H∞ filter to estimate faulty input signals. A fault tolerant H∞ controller is designed for the combined system of plant and filter, minimizing the control objective selected in the presence of disturbances and faults. A truss structure with an MR damper is used to validate the FDI and FTC controller design through numerical simulations. The residuals obtained from the filter through simulation clearly identify the fault signals. The simulation results of the proposed FTC controller confirm its effectiveness for vibration suppression of the faulty truss system.
Keywords
1. Introduction
Space truss structures are always subjected to a variety of dynamic perturbations produced by the crew, transient thermal states during orbit and micrometeorites, among others (Song et al., 2002). Truss-type space structures can carry important, sensitive pieces of equipment, such as interferometers, antennae and other vibration-sensitive instrumentation, whose readings can be disturbed by the vibrations caused by the aforementioned dynamic perturbations. However, because of launch constraints, these truss structures must be lightweight and, consequently, they are prone to vibrations. Various active vibration suppression strategies have been proposed in the past to suppress vibration of the spacecraft truss structures. Active control systems operate by using external energy supplied by actuators to impart forces on the structure, generally depending on a sizeable power supply for operation. However, in the case of space trusses, there are still a number of questions that must be addressed, including stability, cost effectiveness, reliability, and power requirements. For instance, active systems have the ability to input mechanical energy into the structural system, making them capable of generating instabilities due to un-modeled dynamics and nonlinearities or even equipment failure (e.g., power source, sensors, control hardware/software, etc.). Additionally, the need for sizeable power supplies and large control forces may make them costly to install and maintain (Dyke and Spencer, 1997). Semi-active systems offer another alternative in truss control. A semi-active control device is defined as one that cannot increase the mechanical energy in the controlled system but has properties that can be dynamically varied. Semi-active systems are an attractive option because they possess the adaptability of active control systems, yet are intrinsically stable and operate using very low power. Additionally, semi-active control devices do not require large power sources such as those associated with active control systems (Li et al., 2005; Liu et al., 2007), making them quite attractive for seismic applications. One semi-active device that appears to be particularly promising for truss applications is the magneto-rheological (MR) damper.
To simplify the control of the truss structures, the development of an adaptive-passive system is proposed, one which initially tunes the parameters of the system and then achieves vibration suppression through MR fluid based damping devices. MR dampers have been developed as semi-active vibration devices in recent years (Dyke et al., 1996; Li et al., 2010; Oh and Onoda, 2002; Spencer et al., 1997, 1998). MR fluid, a material which responds to applied magnetic fields, is used as the operating fluid. MR fluids alter their viscosity according to the applied magnetic field and exhibit nonlinear properties like a typical Bingham fluid. In MR dampers, electromagnets are used to generate the required magnetic field. The force generated in the MR damper is therefore controlled by adjusting the electric current supplied to the electromagnets (Sodeyama and Sunakoda, 2003). The advantage of this adaptive-passive system lies in its fail-safe design. Unlike active control, which requires active energy for vibration suppression, this MR fluid design would utilize its passive properties in the event of energy loss.
Fault tolerant schemes in engineering systems provide early warnings of faulty sensors, actuators, or system components. In this paper, a component fault refers to a change in the operating behavior of a component such that the new behavior differs significantly from what is defined as normal behavior for that component. Common examples of such faults include bias errors in the output of a sensing device and loss of function for an actuating device (Chen and Patton, 1999). Health monitoring systems are needed to provide early notification of faults before they lead to catastrophic failure so that remedial actions can be carried out to retain the system stability and performance. Consequently, the fault detection and isolation (FDI) and fault tolerant control (FTC) problems have received considerable attention in control systems literature (Chen and Nagarajaiah, 2007, 2008; Diallo et al., 2004; Koh et al., 2005a,b; Li et al., 2007; Maki et al., 2001; Narasimhan et al., 2008).
Most applications of fault tolerant control schemes are based or partially based on hardware redundancy. The use of this kind of hardware redundancy is common, but it carries with it the problem of additional equipment, maintenance cost, and space requirements. In some engineering environments, extra space for redundant sensors and actuators are hard to come by.
Recently developed analytical redundancy techniques use residue signals to monitor the health of systems. The term residue is defined as a signal that is zero when the system functions properly and non-zero when some abnormal behavior is observed. This residual signal indicates faulty information in the system and can be used not only for fault detection, but also for fault identification. Further more, it also provides basic information for the fault tolerant control purpose of use. It is a natural way to cope with the FTC Problem by employing fault diagnosis information online.
There are several approaches to generate the residual signals and to build the FTC scheme, such as the unknown input observer, the H∞ method, the Kalman filter, and the H2/LQG techniques. (Hamouli et al., 2004; Douglas and Speyer, 1999; Eryurek and Upadhyaya, 1995). Among these approaches, the H∞ optimization based methods have attracted much attention due to their explicit address of robustness issues. In this work, an H∞ FDI filter is developed based on the system identification model of the truss. The main design goal of this FDI filter is to detect and identify sensor failure of the truss structure system. The linear matrix inequality (LMI) formulation of the FDI H∞ filter is obtained based on the famous bounded real lemma. An FTC H∞ control scheme is proposed and it successfully retains the vibration suppression level when the sensors on the truss have partially failed.
The notation to be used is given as follows: Given a real matrix N, the orthogonal complement

The standard notation > (<) is used to denote the positive (negative) definite ordering of symmetric matrices. The ith eigenvalue of a real symmetric matrix N will be denoted by λi(N) where the ordering of the eigenvalues is defined as
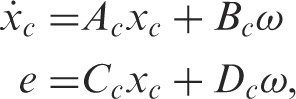
2. H∞ fault detection filtering and H∞ fault tolerant control problems
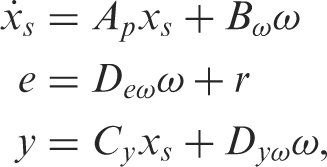
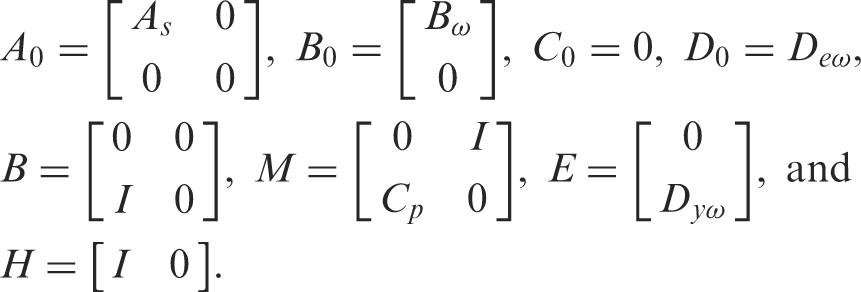
Consider the following state-space realization for a plant P given by
Block diagram of the H∞ fault detection filter.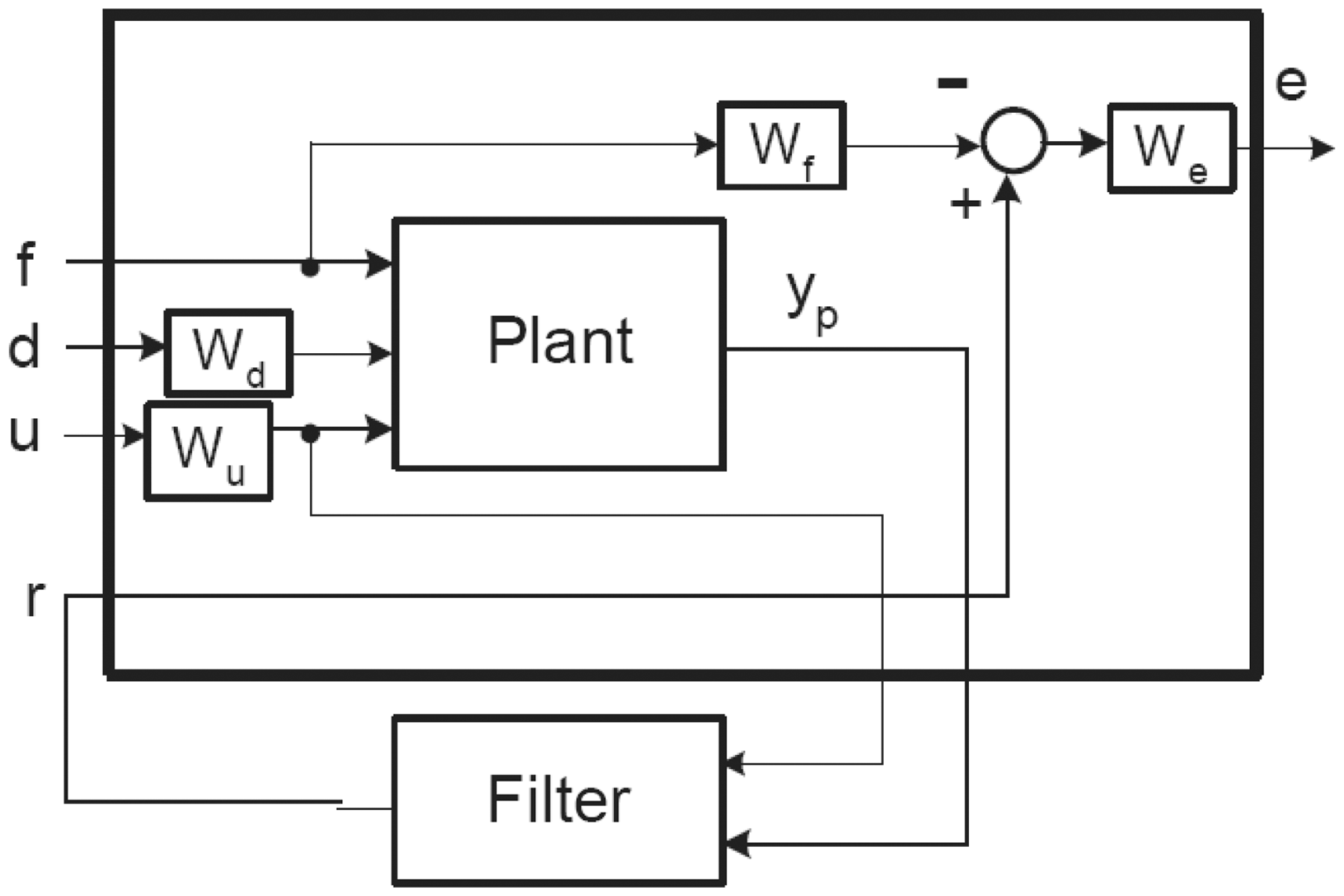

The expression (3) is equivalent to minimizing the H∞ norm of the transfer function
Using the linear fractional transformation (LFT), the space state realization of the transfer function (or transfer matrix)
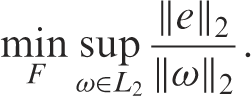
It is well known that the solution to the H∞ control problem is a powerful tool in solving the disturbance attenuation problem. The H∞ optimal fault tolerant control design problem is to find a dynamic controller, C, to minimize the worst case performance output energy over the energy of bounded generalized disturbance,
The control strategy of the H∞ control FTC controller is shown in Figure 2.
Block diagram of the proposed fault tolerant controller.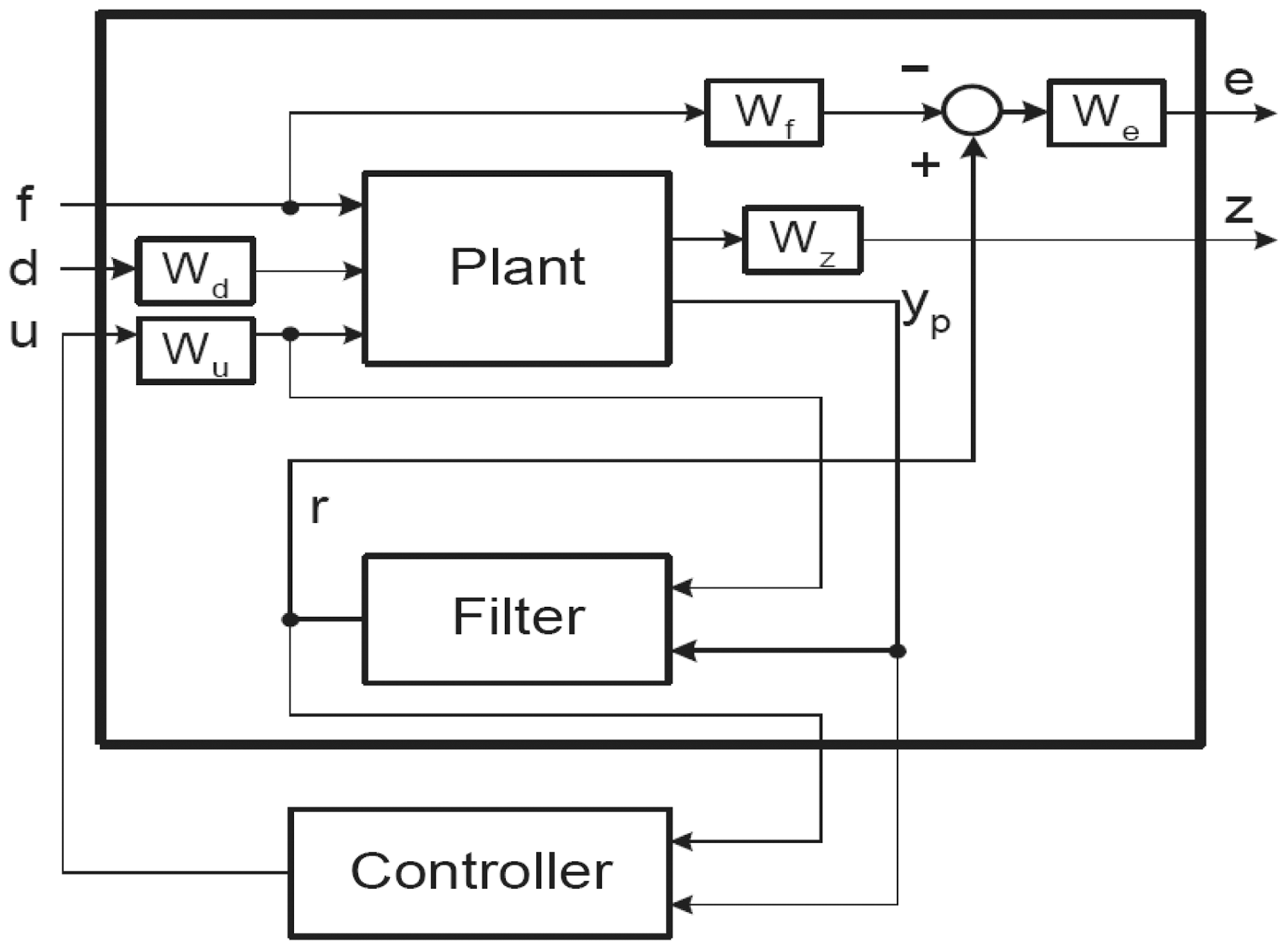
3. H∞ filter design using linear matrix inequality
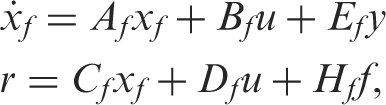
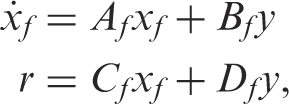
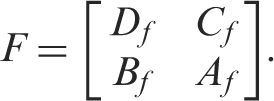
Consider a system with order np that has the state space representation of (4). The following theorem is useful in designing a state filter F of order nf, which is less than or equal to np, with the following state space representation,
There exists an


In this case, all such filters are given by





To prove the above theorem, we need the following bounded real lemma and projection lemma (Iwasaki and Skelton, 1994).
Consider a stable linear time invariant system
Consider a symmetric matrix



Define the state vector Proof of theorem 1
Substituting Ac, Bc, Cc and Dc into the bounded real lemma (18) and writing it in the form of inequality (19), we have
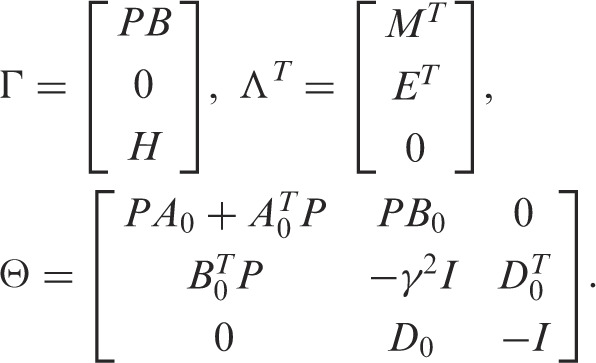
Noticing that
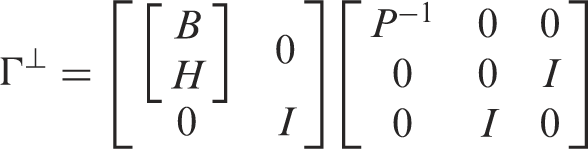


Hence,

Moreover, we have

The free parameters can be used to optimize the system properties. A filter of order nf < np exists if and only if X and Y satisfy the following rank constraint:

For the full order (nf = np) H∞ filter problem, a minimization of γ is possible because the non-convex rank condition (11) is automatically satisfied (Bai and Grigoriadis, 2005). Thus the LMI problem has only convex constraints on the matrix parameters X and Y for the full order filter design. However, the reduced order filter pair requires the inclusion of a non-convex rank constraint. Once this feasible pair is found, the Lyapunov matrix P is constructed as
4. Description of truss structures
The truss used in this research is located at Rice University and shown in Figure 3. This 8-bay, planar aluminum truss structure consists of 109 rod elements connected at 36 nodes. The total length of the truss is 4 m with each bay 0.5 m long and with rod elements having a Young's modulus of The 8-bay truss used for the study.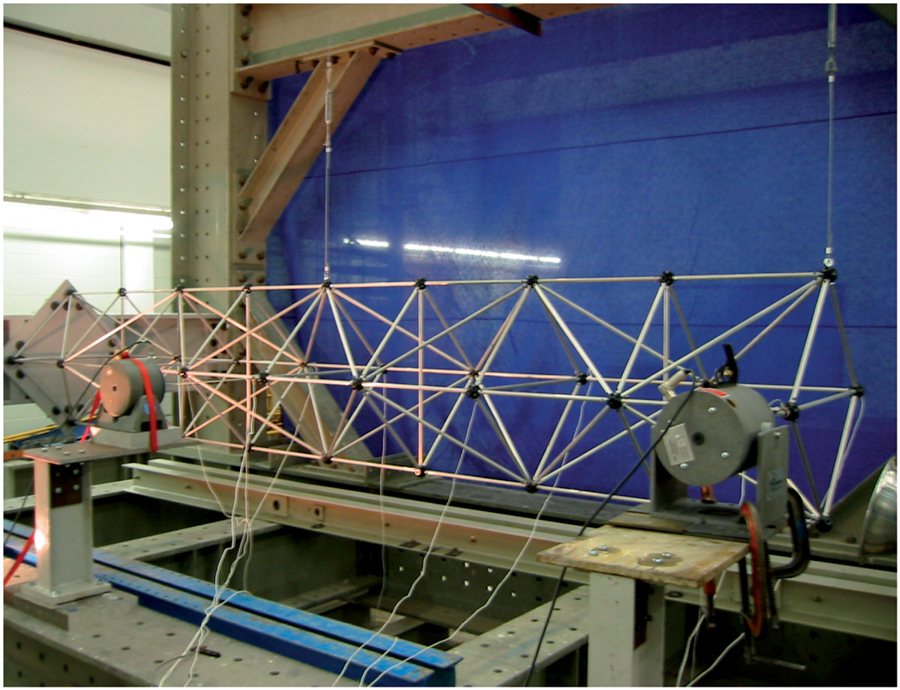
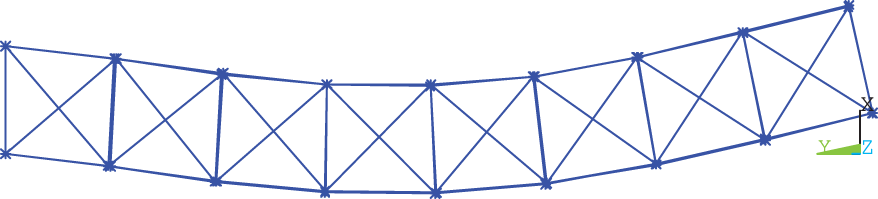
The truss can be simplified as a finite element model with 36 nodes and 109 members as shown in Figure 4. This truss has an electromechanical shaker mounted for excitation at node 4. Four accelerometers are mounted for monitoring of vibrations on the truss at node 1, 9, 13 and 17, respectively. An MR damper is installed between node 32 and 36 to reduce the vibration of the truss. The first four modes of the truss computed by finite element method (FEM) are shown from Figures 5 to 8.
Finite element model of the truss. The first mode of the truss (13.68 Hz). The second mode of the truss (38.55 Hz). The third mode of the truss (66.46 Hz). The fourth mode of the truss (110.24 Hz). Comparison of output and identified model (from shaker to sensor 1). Comparison of output and identified model (from shaker to sensor 2). Comparison of output and identified model (from shaker to sensor 3). Comparison of output and identified model (from shaker to sensor 4). Bode diagram of identified model (from shaker to sensor 1). Bode diagram of identified model (from shaker to sensor 2). Bode diagram of identified model (from shaker to sensor 3). Bode diagram of identified model (from shaker to sensor 4). Comparison of output and identified model (from controller to sensor 1). Comparison of output and identified model (from controller to sensor 2). Comparison of output and identified model (from controller to sensor 3).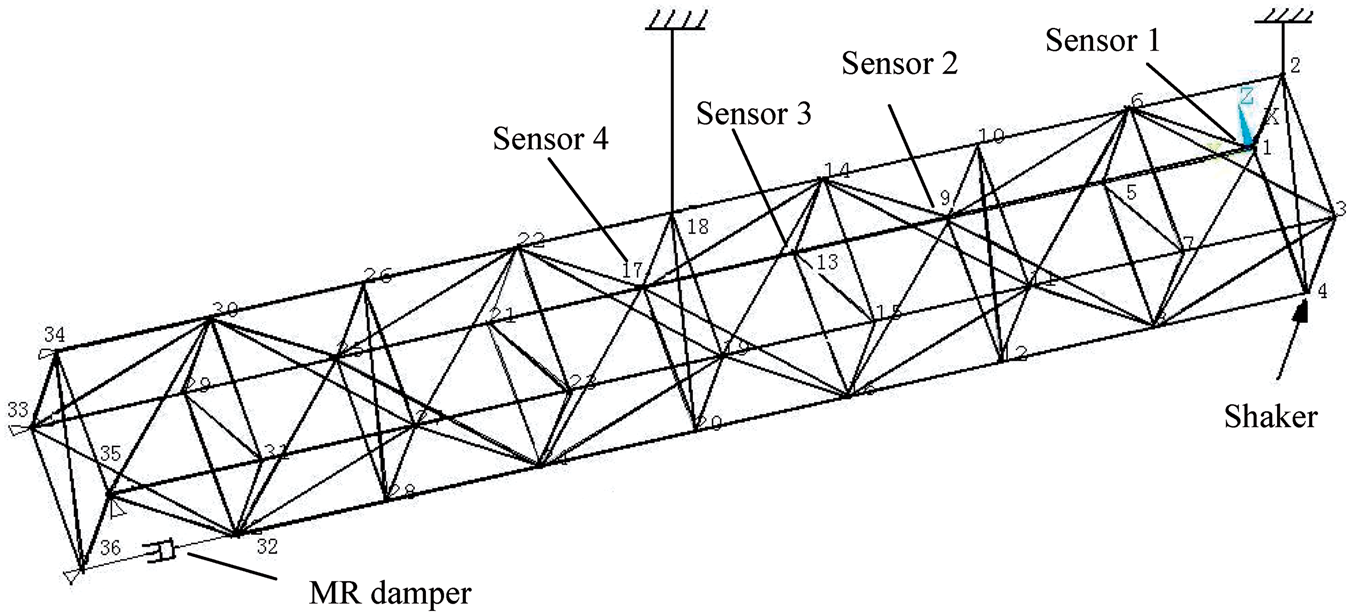



5. System identification
The approach of determining the transfer function using the mathematical modeling and finite element analysis is complex. The finite element models are sometimes not feasible for control purposes because their orders are too high to achieve the desired accuracy. However, the system identification technique based on input-output offers a rather simplistic approach to obtain the transfer function of the system. The input and the output signals from the system are analyzed in order to obtain a model.
In this work, the system identification algorithm used to identify the system is based on the Subspace method. A linear system can be represented in the state space innovations form as

The subspace method can be used to estimate the A, B, C, D and K matrices. Assuming that x(t), y(t), and u(t) are known, the equation (26) becomes a linear regression. This will enable us to estimate the matrices C and D by the least square method and will lead us to determine e(t). Again, e(t) can be treated as a known signal and this will lead to the determination of A, B and K using the least squares method. The Kalman gain K is computed using the Riccati equation. In the above method, initially it is assumed that states x(t) are known, but they need to be determined. The states x(t) can be formed as linear combinations of the k-step-ahead predicted outputs. The predictor, in this method, can be determined using the k-step-ahead predictors by projections from the observed data sequences. The above model derived from the subspace method is then used as a base model for further refining the model by the prediction error method (PEM). In the time domain, the above system can be represented by using the shift operator q as
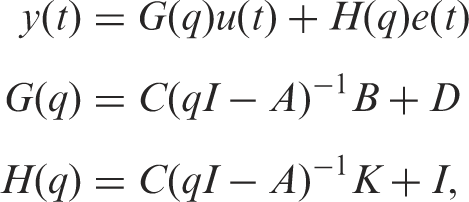

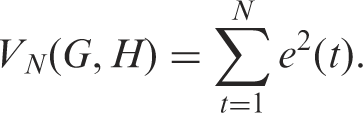
The above error can now be parameterized by the state space matrices derived by the subspace method. The common parametric identification method is to determine estimates of G and H by minimizing
This forms the basis for the PEM. The model is first initialized and further adjusted by optimizing the prediction error fit. Substantial details for system identification can be found in Ljung (1999) and MATLAB reference manual. MATLAB has a system identification toolbox to perform the above algorithm. The PEM first initializes the model by using the subspace algorithm and then minimizes the prediction error. In this paper, a state space realization that does not model the noise properties (i.e. an output error model), (K = 0), is considered. Thus, the implications will be on the predictors which will be based on the past inputs only.
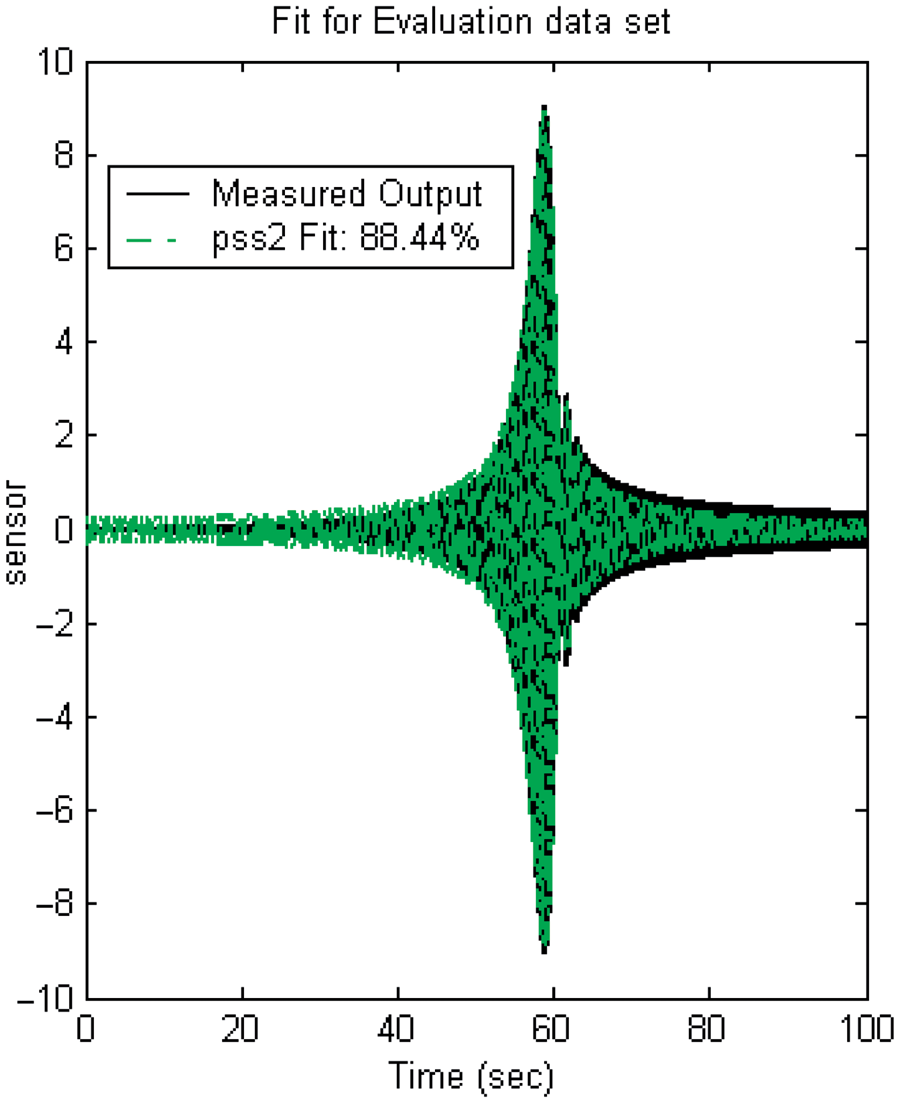
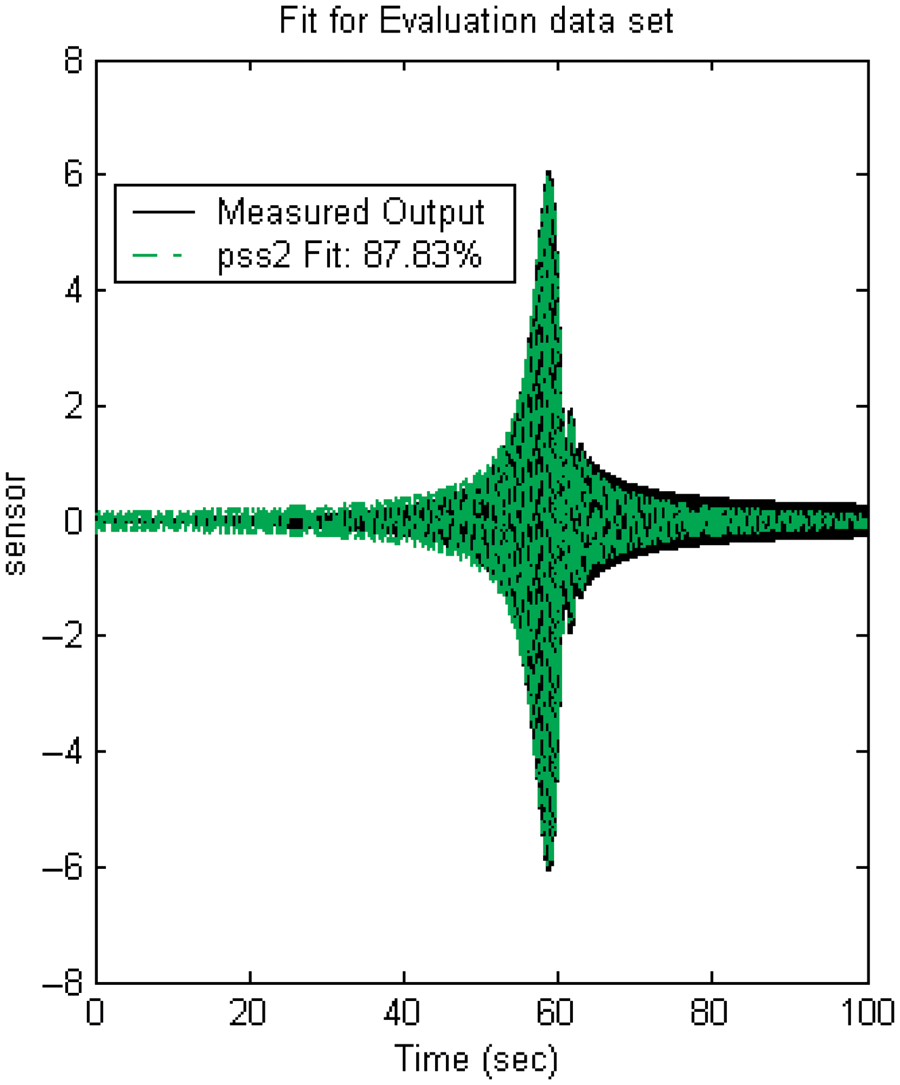
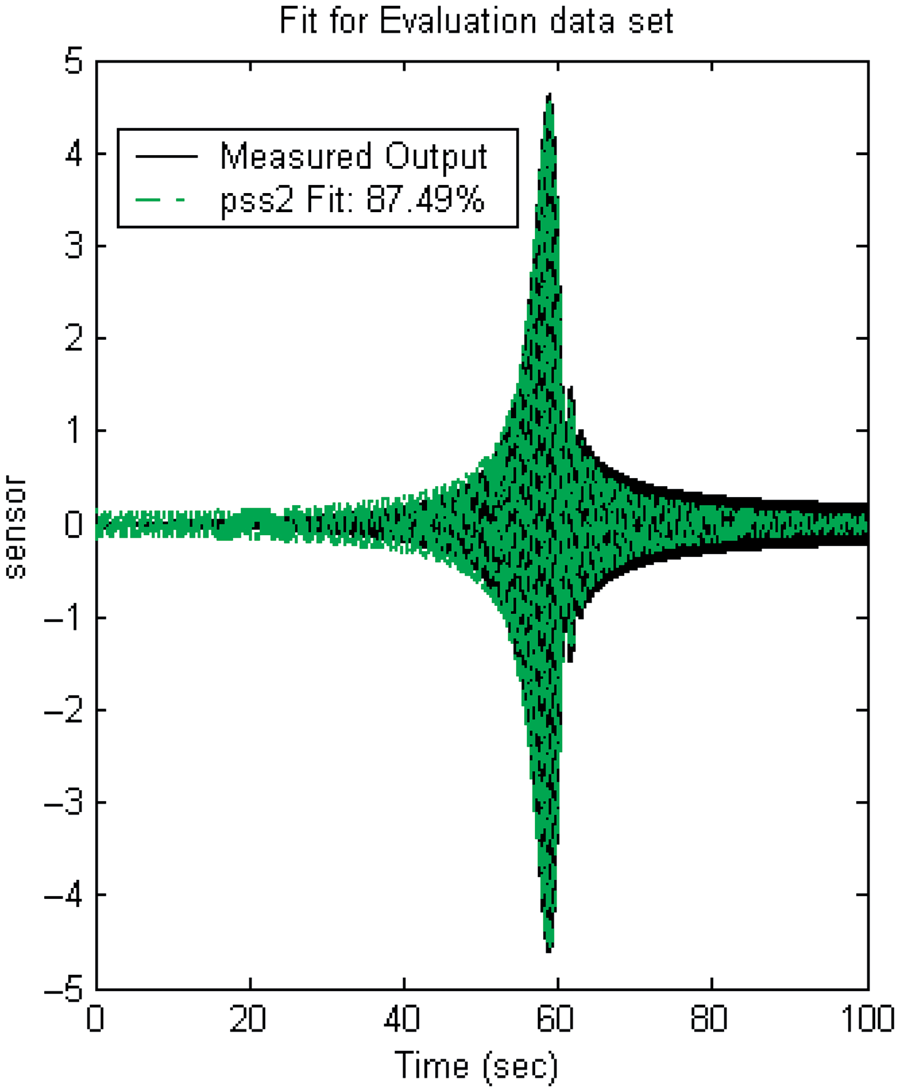
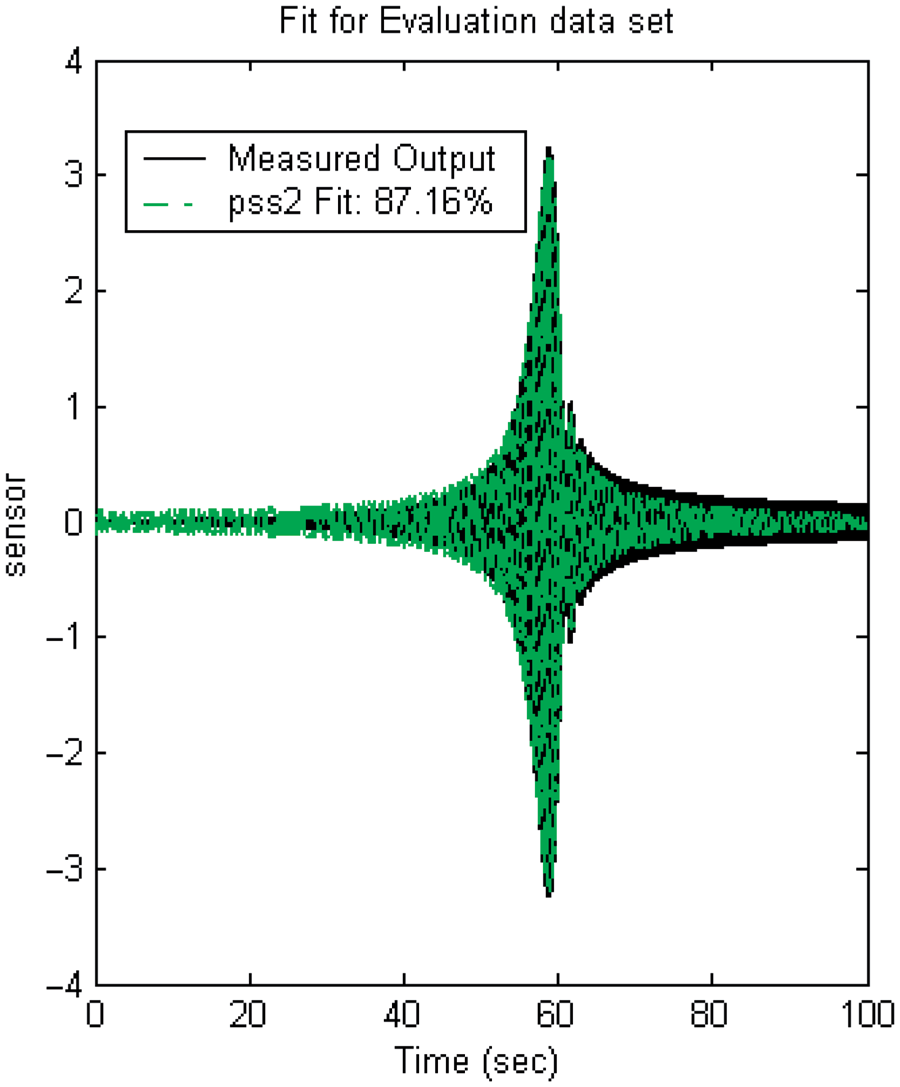
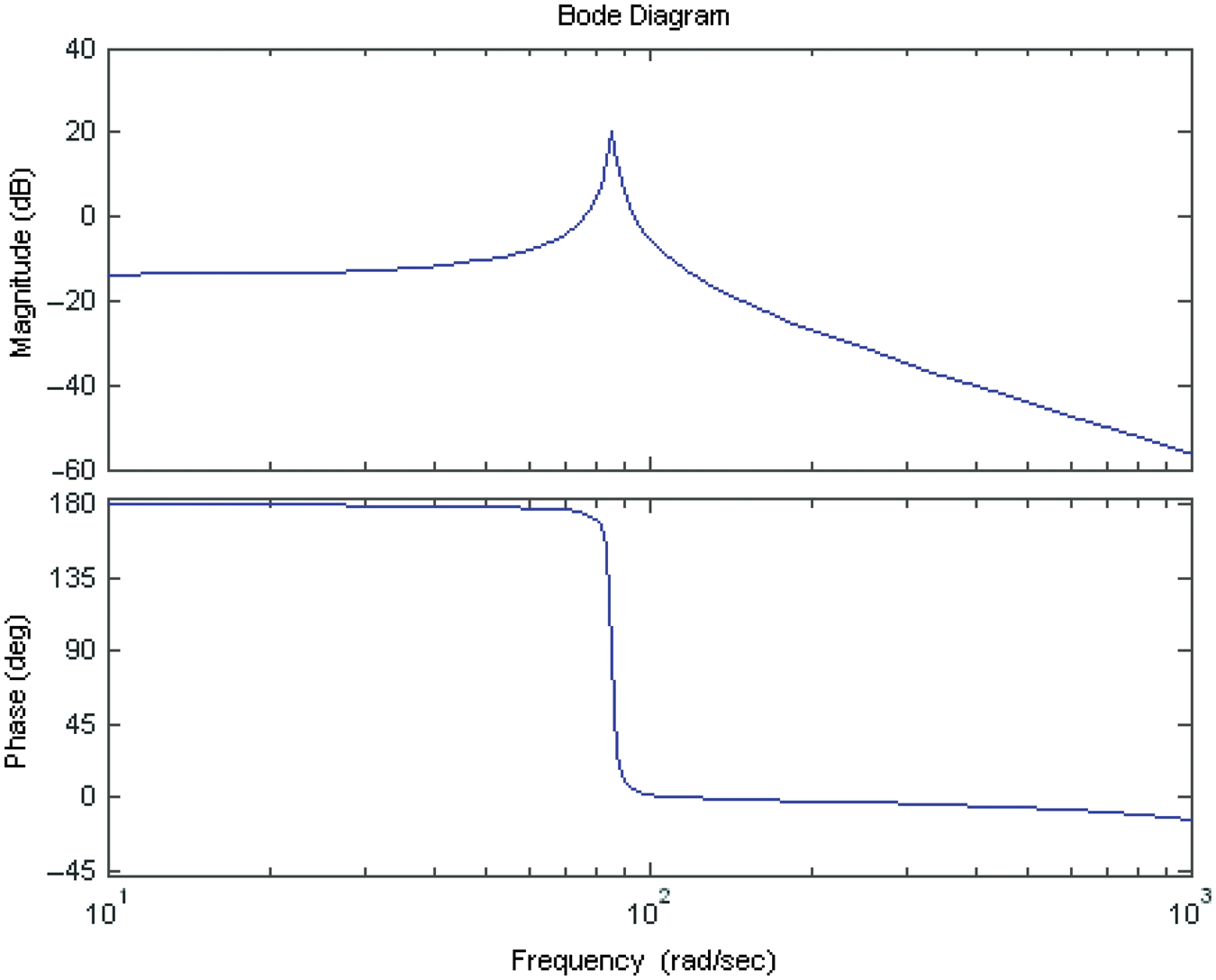
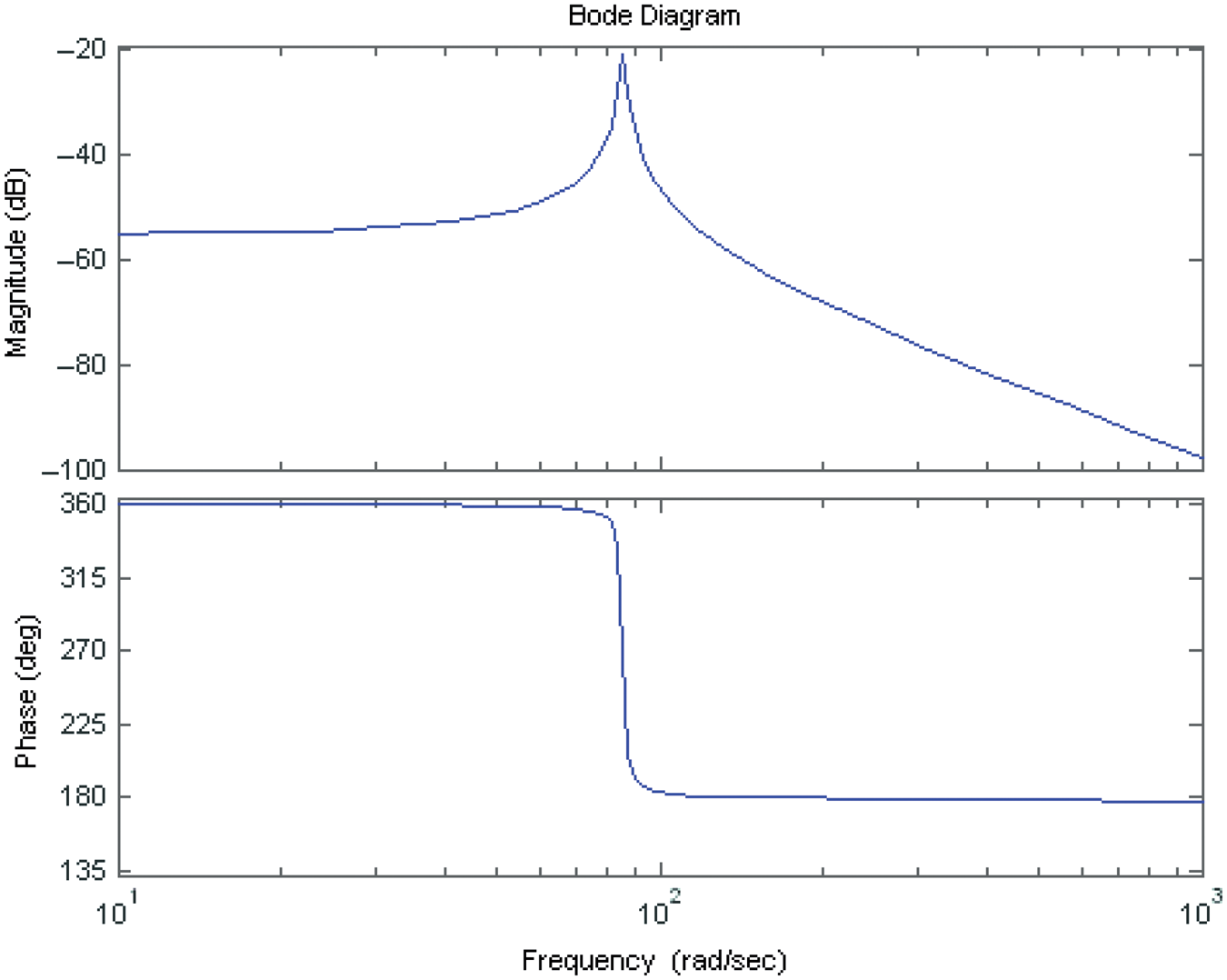
Using the truss structure discussed above, node 4 by a sweep sine signal of frequency ranging from 5 Hz to 20 Hz for 100 seconds. Using the MATLAB System Identification toolbox a state space model of second order is obtained. The validation results of the identified models from the shaker to sensors are shown from the Figures 9 to 12 with fits of 88.44%, 87.83%, 87.49% and 87.16%, respectively. The Bode plots of the identified model from Figures 13 to 16 clearly show the resonance frequency at 13.68 Hz (85.95 rad/sec).
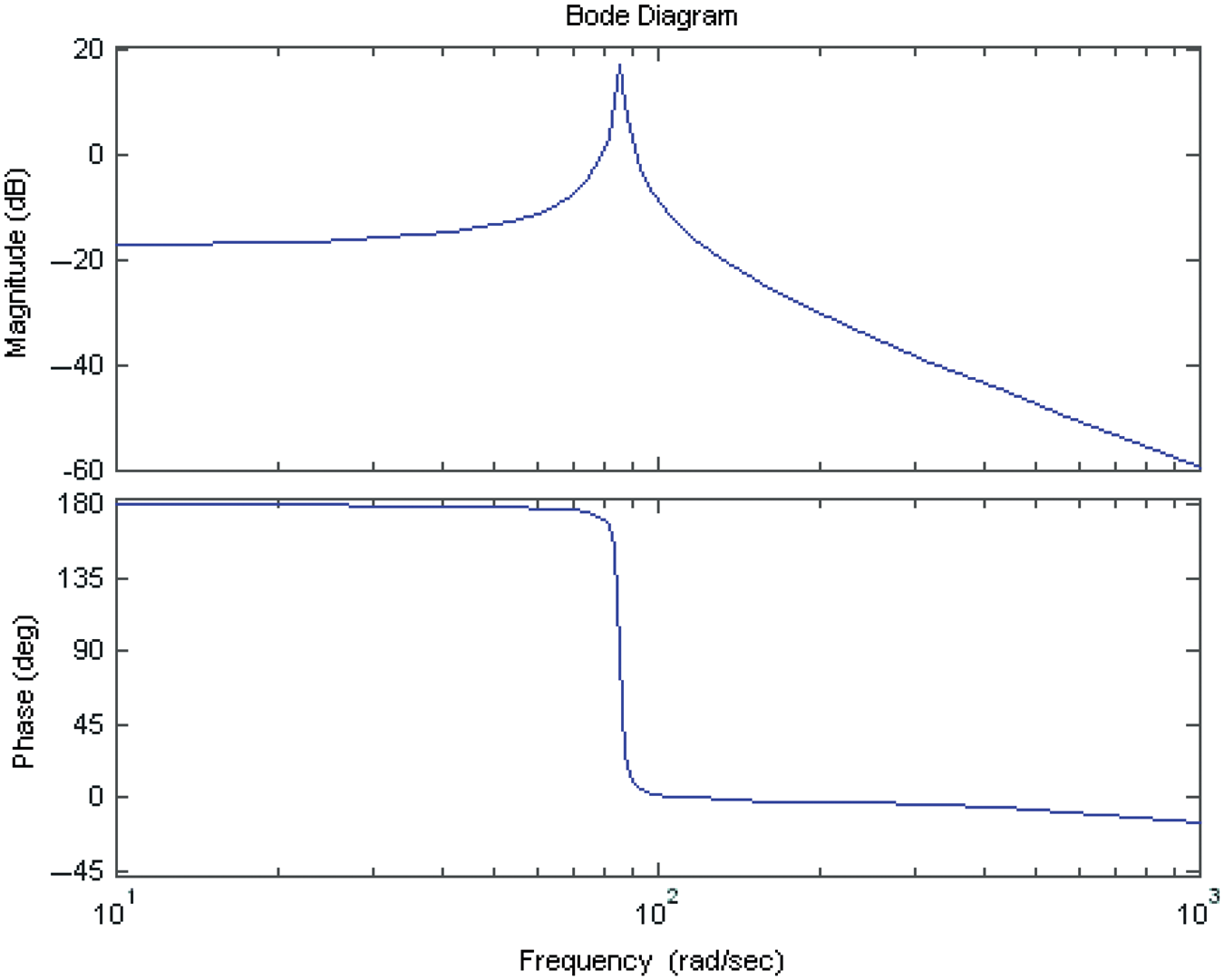
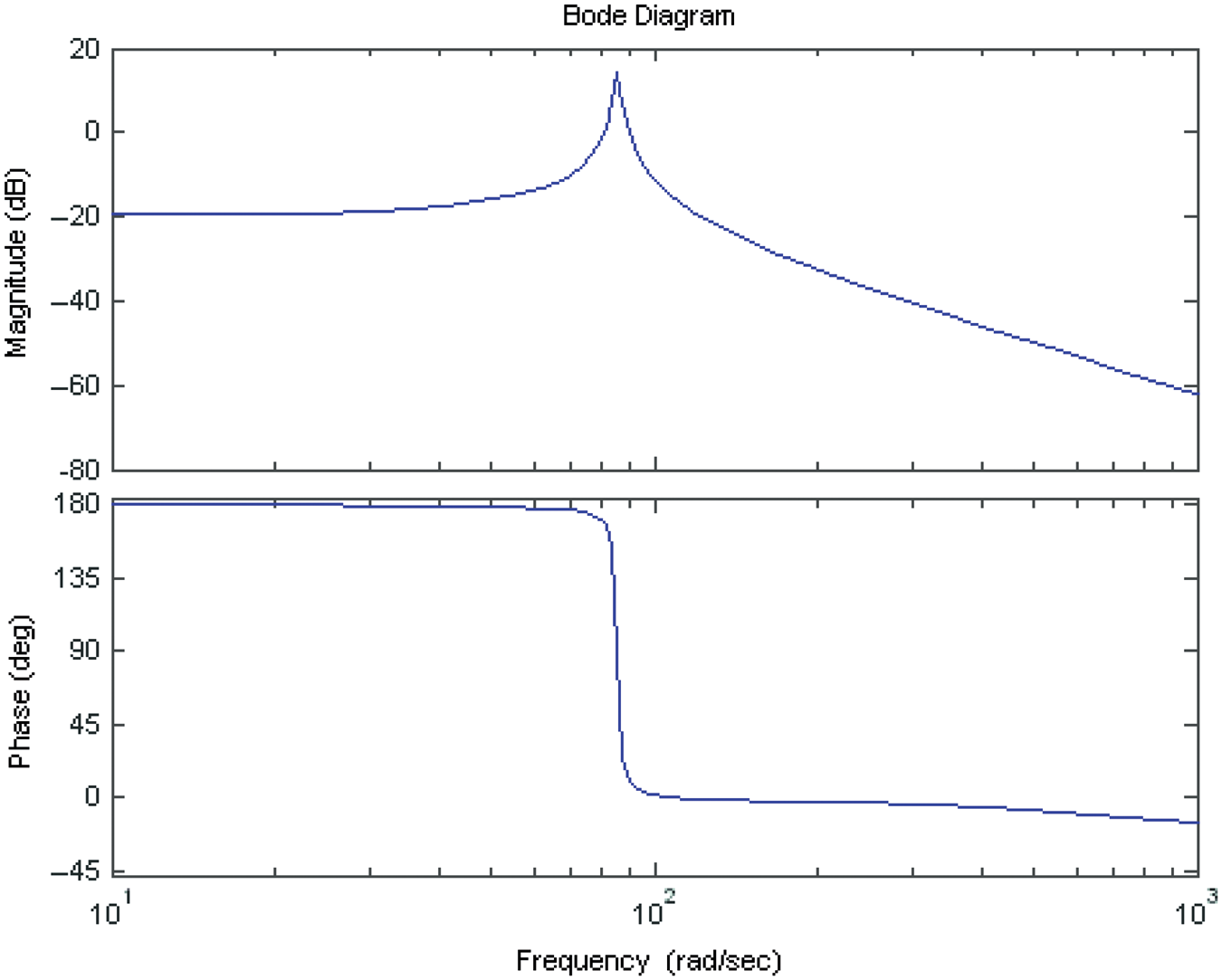
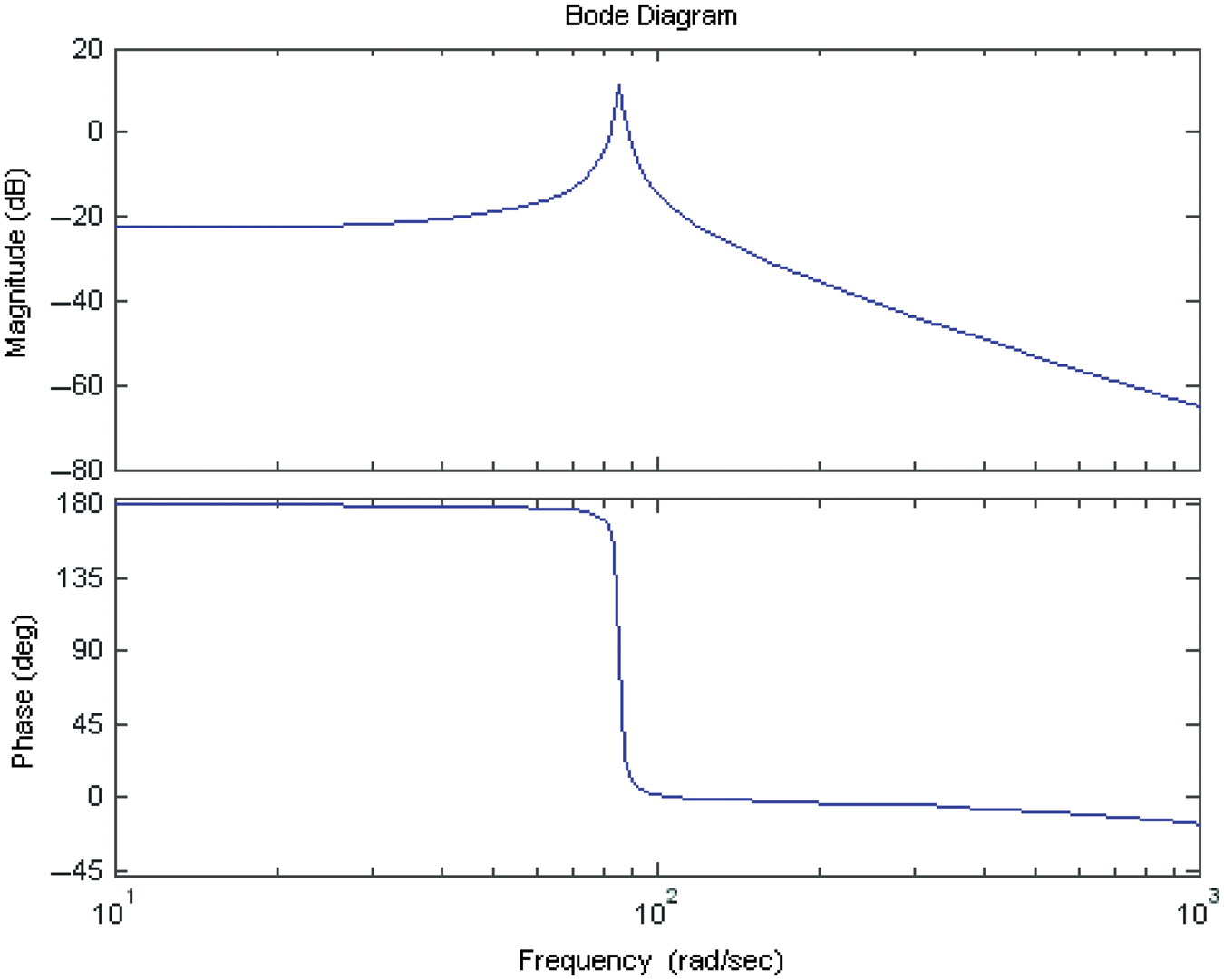
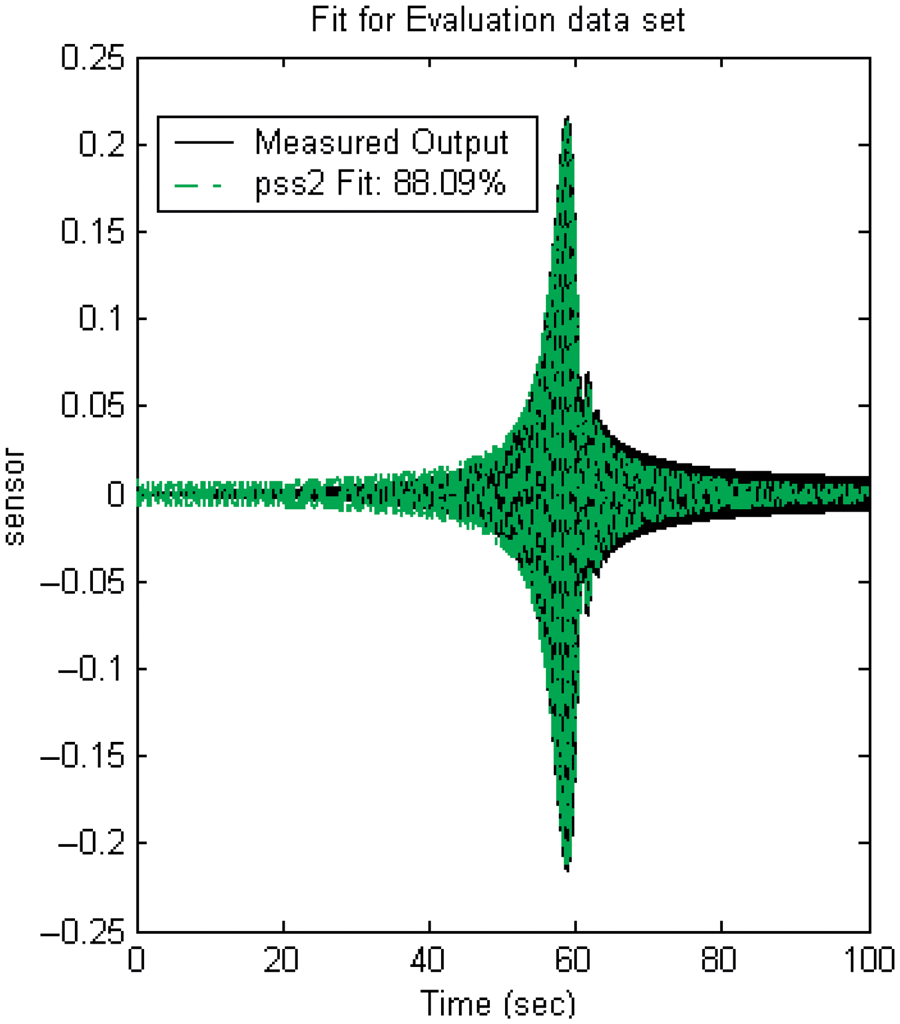
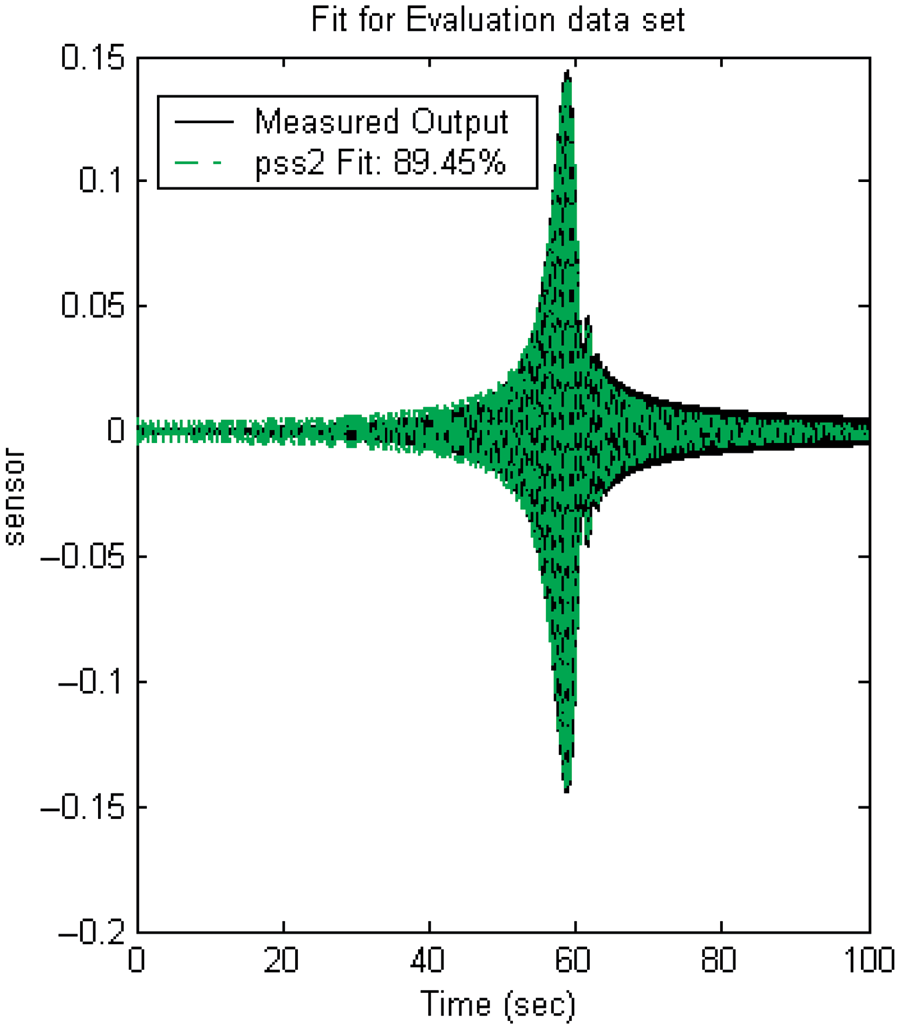
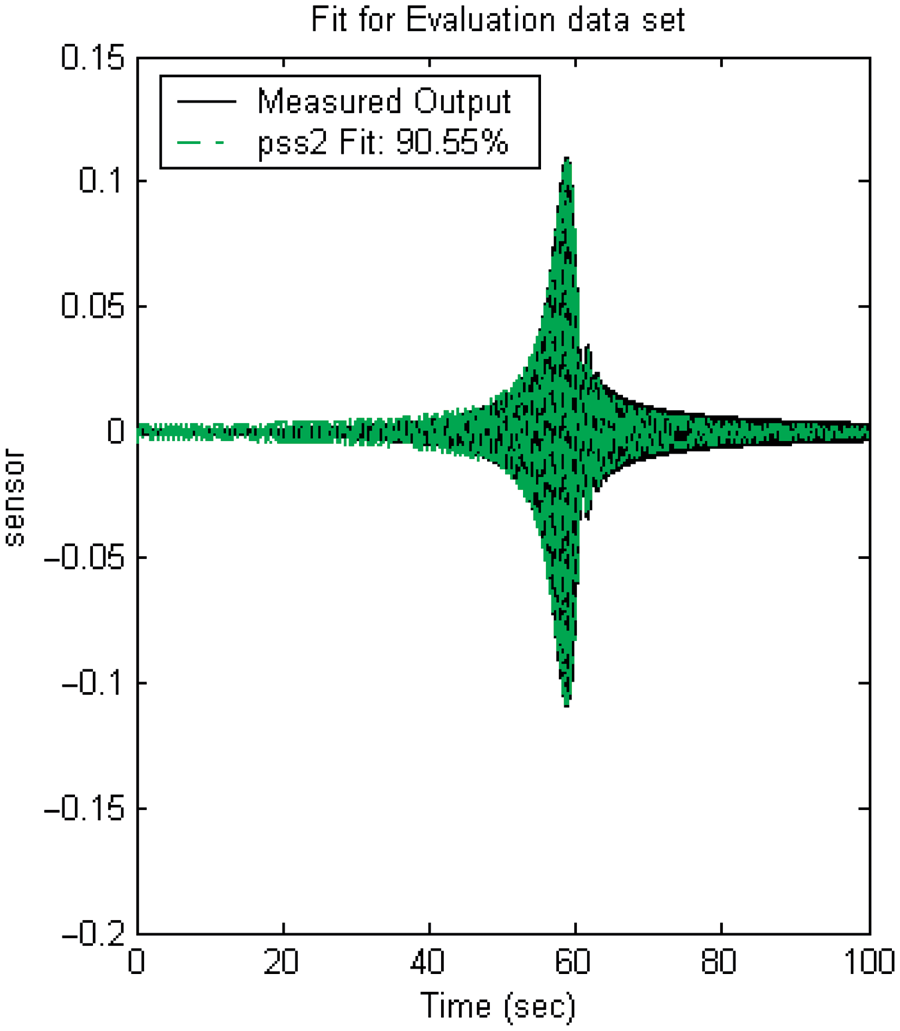
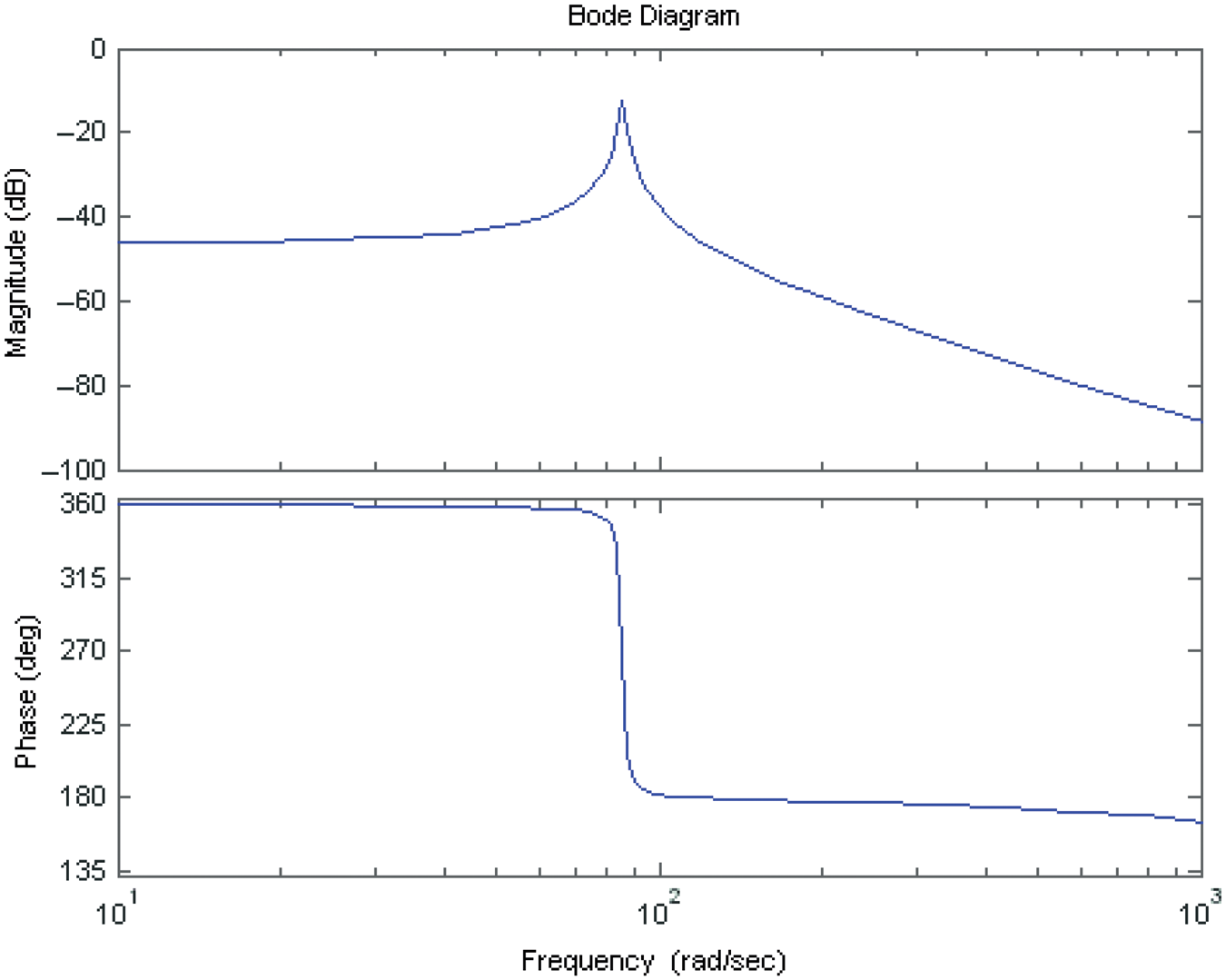
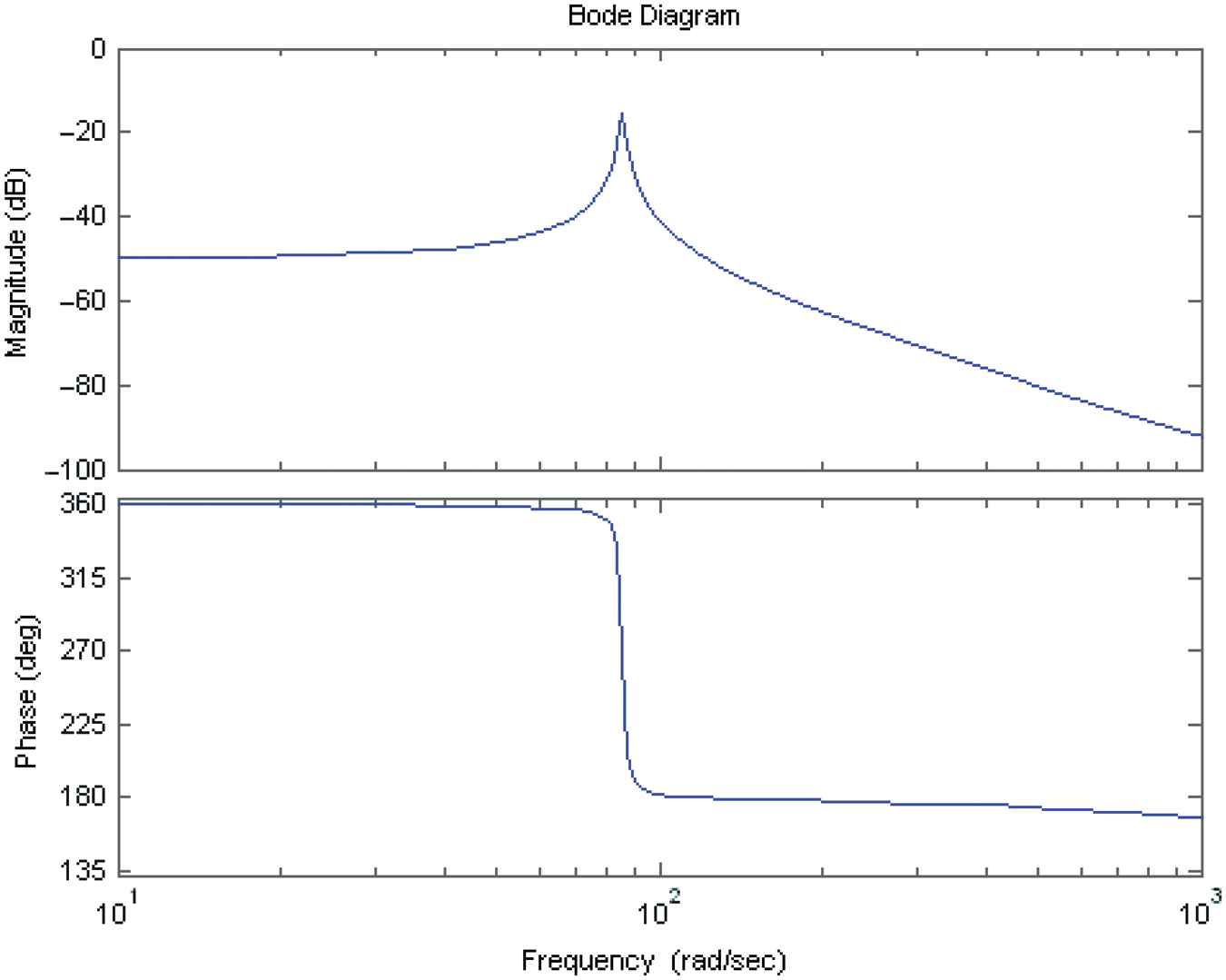
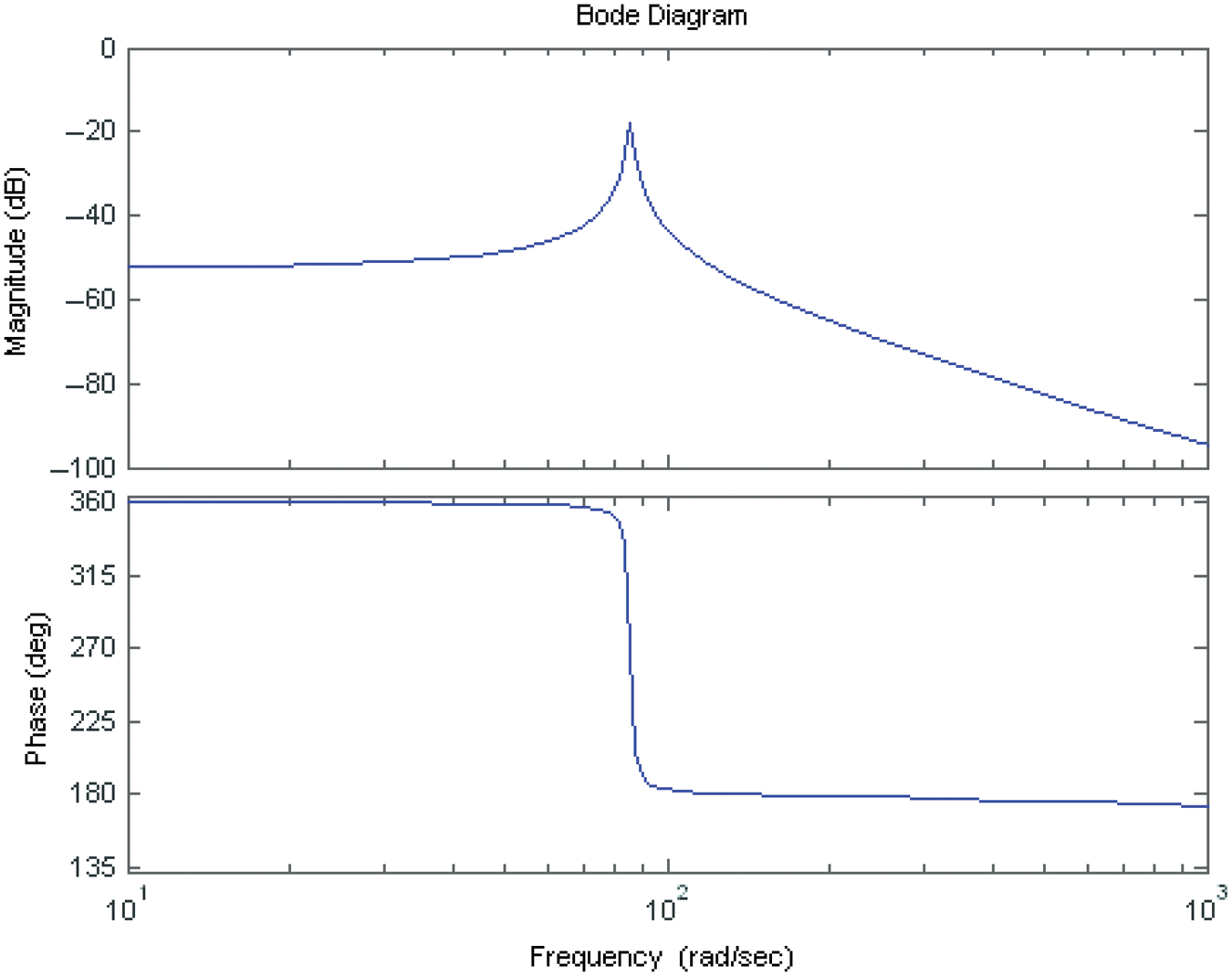
Similarly, the validation results of the identified models from the controllers to sensors are shown from the Figures 17 to 20 with fits of 88.09%, 89.45%, 90.55% and 92.21%, respectively. The Bode plots of the identified model are shown from Figures 21 to 24.
Comparison of output and identified model (from controller to sensor 4). Bode diagram of identified model (from controller to sensor 1). Bode diagram of identified model (from controller to sensor 2). Bode diagram of identified model (from controller to sensor 3). Bode diagram of identified model (from controller to sensor 4).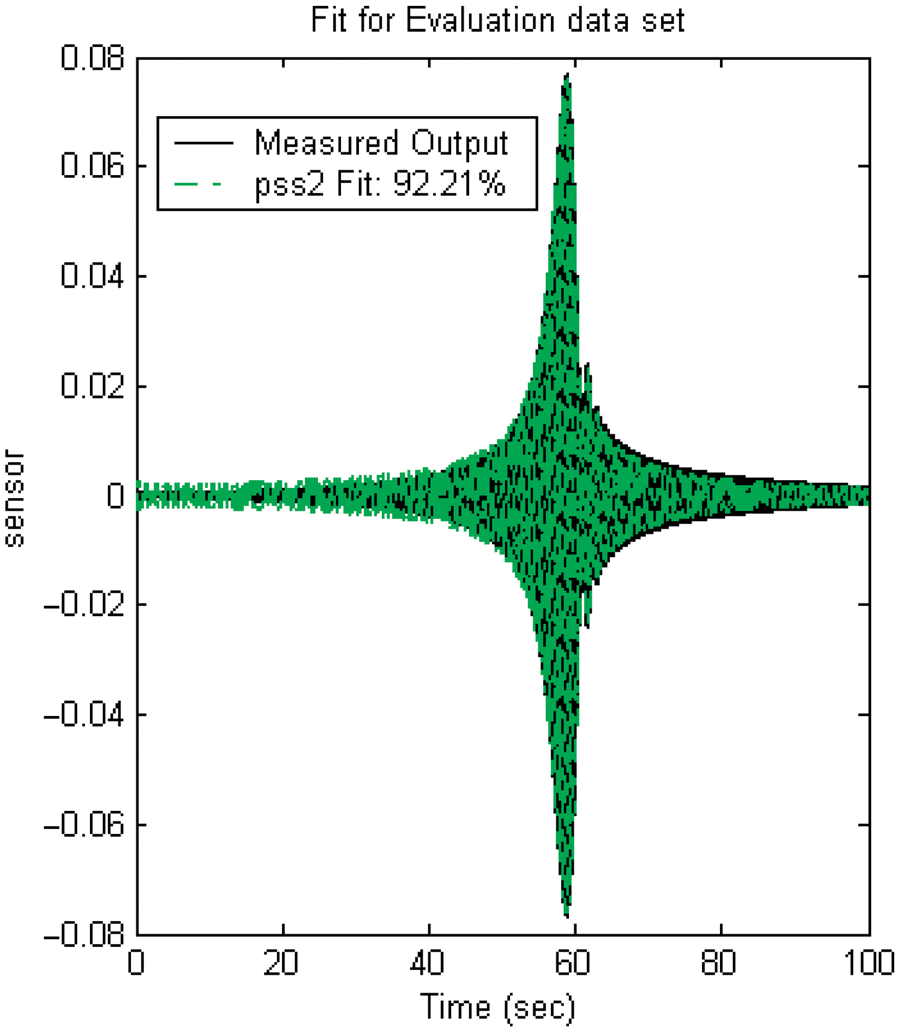
6. Design of the H∞ filter and fault tolerant H∞ controller
Some research on FTC turns to designing an integrated filter and controller. Such methods usually lead to high order integrated filter/controllers. To ease the implementation of the FTC, the H∞ FDI filter and H∞ FTC were designed separately.
6.1. Weight selection
In the literature regarding H∞ norm analysis and design, the weight function selection is a highly problem-dependent, iterative process. Usually, the trial-and-error procedure is repeated until the desired performance and robustness objectives are achieved. In this research, the control objective is to suppress the first mode vibration of the smart structure. The disturbance input weight, Wd, is used to shape the worst case disturbance and can be a low pass shape or stress the amplitude at the frequency of the first mode. In this study, we use a sine wave with the frequency of the first mode of the structure as the disturbance input. The disturbance input weight is set to scalar 1. The performance or error weight, We, is used to specify the performance objectives of the resulting filter from the H∞ optimization, e.g. bandwidth, steady-state requirements, and attenuation/amplification of signals at certain frequency ranges.Typically, the actuator fault input weight, Wf, has low-pass characteristics to emphasize the effects of faults on the low-frequency domain. Figure 25 shows the frequency responses of the designed weights.
Weights design of fault detection and isolation and fault tolerant controller system.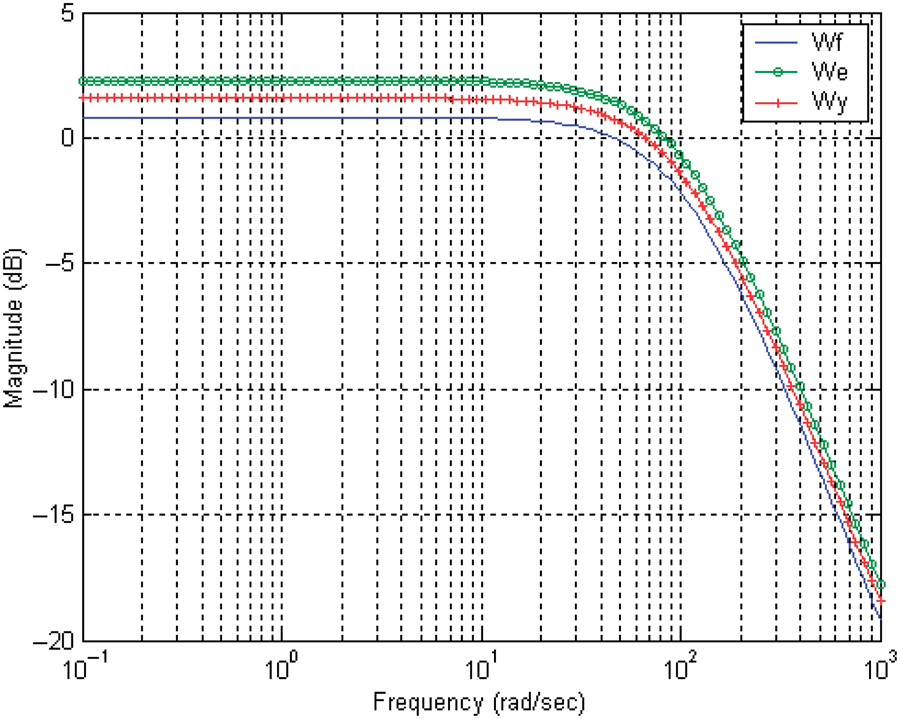
6.2. Fault tolerant controller design
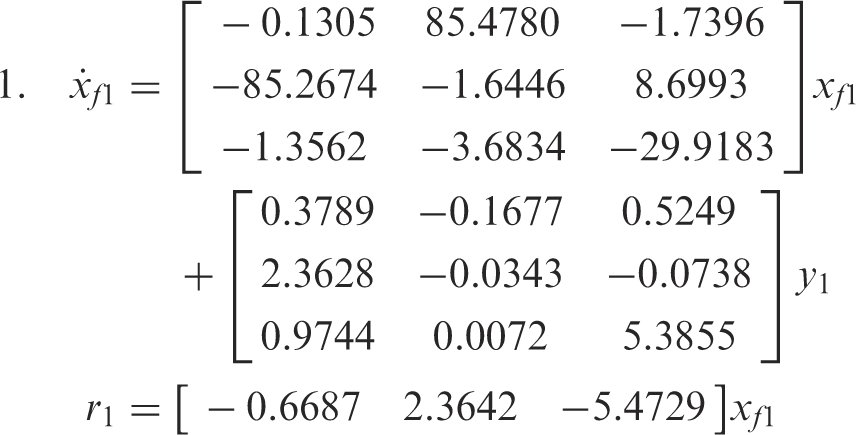
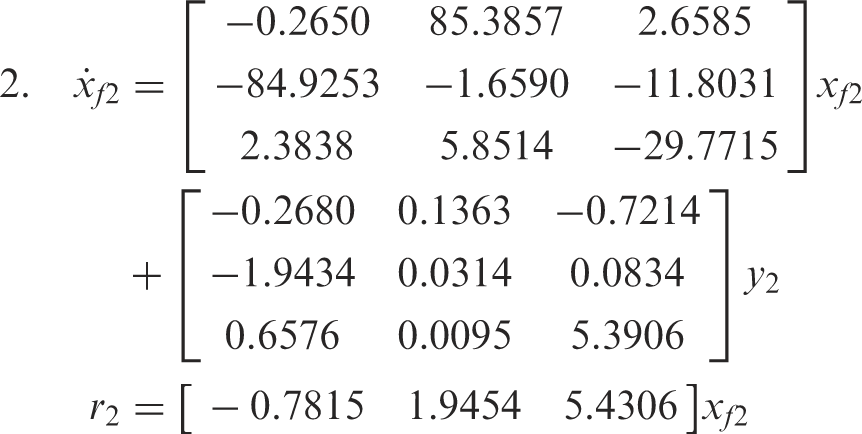
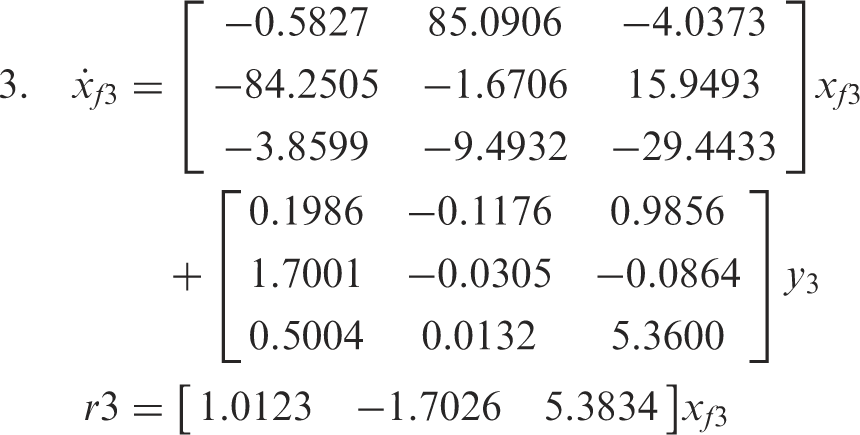
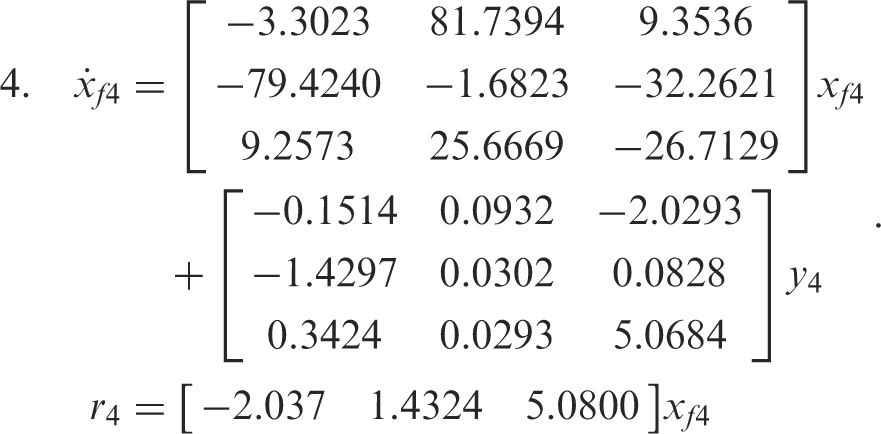
The identified structure model combined with the weights yields the augmented model, P, as shown in the bold black square in Figure 1. Using the developed LMI method, the following four stable, 3 rd order H∞ filters for sensors are obtained:
Using a similar technique, the reduced 3 rd H∞ controller is obtained.
6.3. Fault Detection and Isolation and Fault Tolerant Controller of the Truss Structure
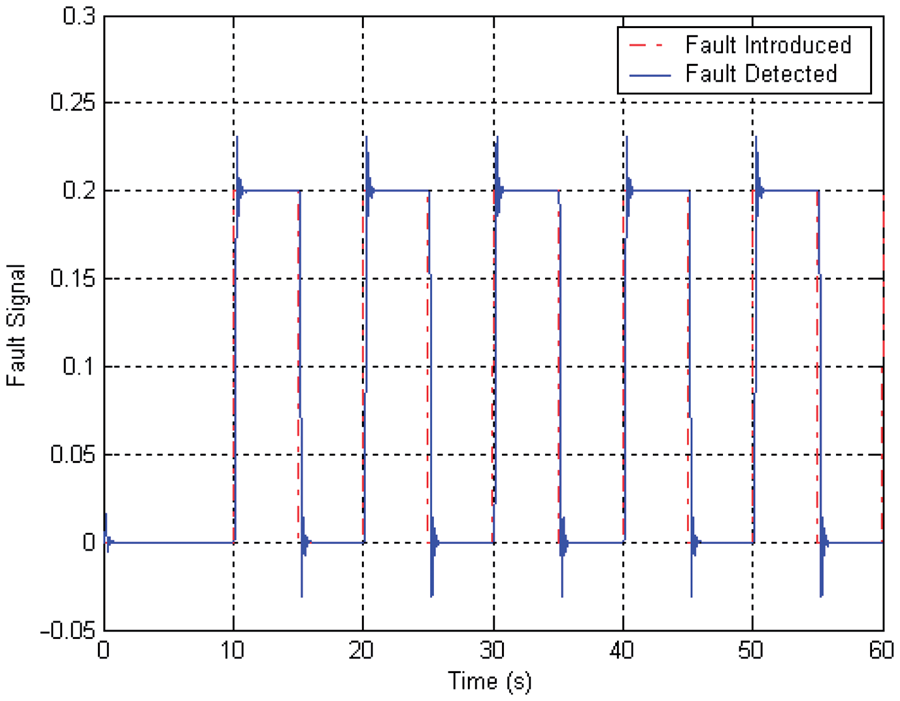
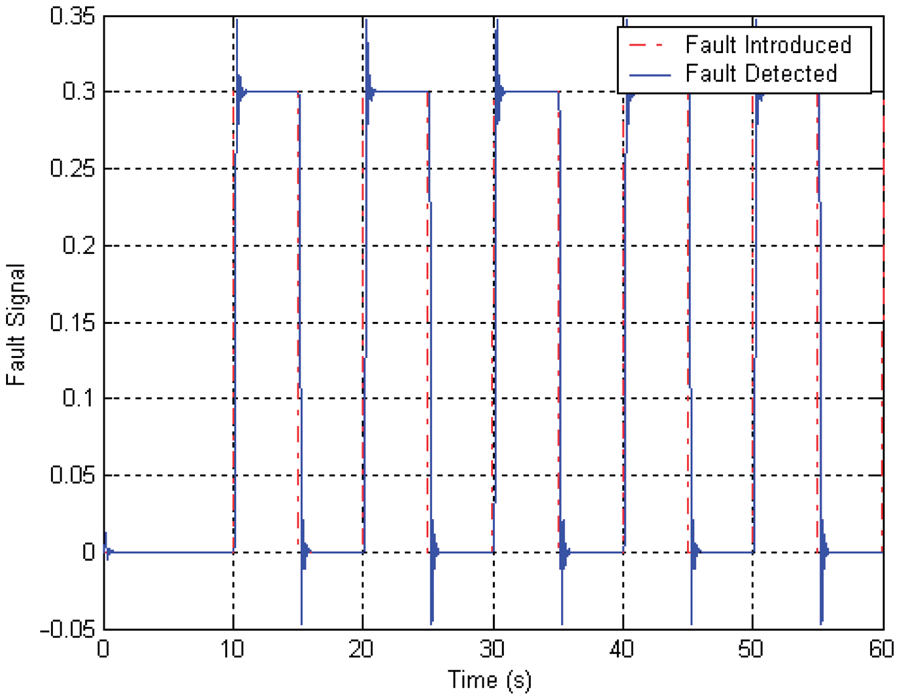
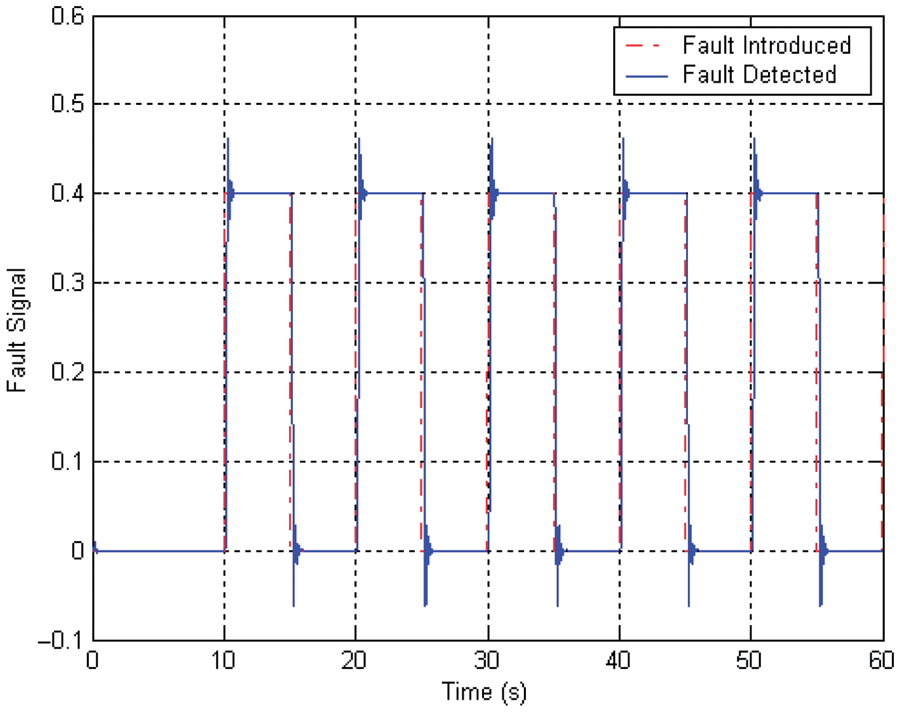
The truss was continuously excited by the sine wave at 85.95 rad/sec, the worst case disturbance input. The residual responses to different faulty inputs were examined. First, a faulty signal of square wave with varying amplitude was introduced into four sensors at time 10 sec. The filter outputs are shown in Figures 26 to 29. From these figures, we can see that the residual signal clearly identified the square wave.
Fault identified in sensor 1. Fault identified in sensor 2. Fault identified in sensor 3. Fault identified in sensor 4.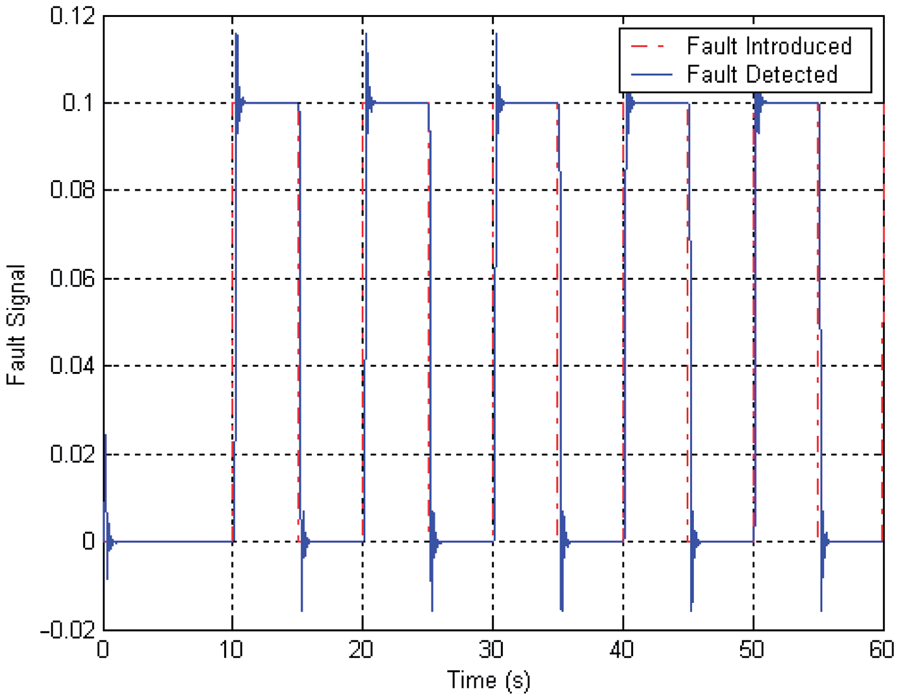
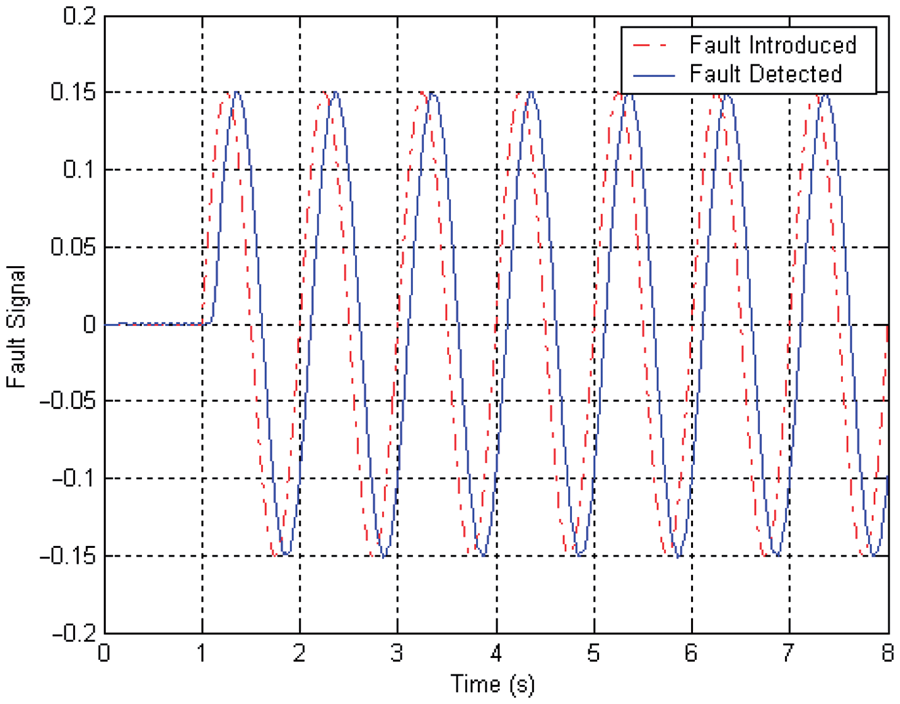
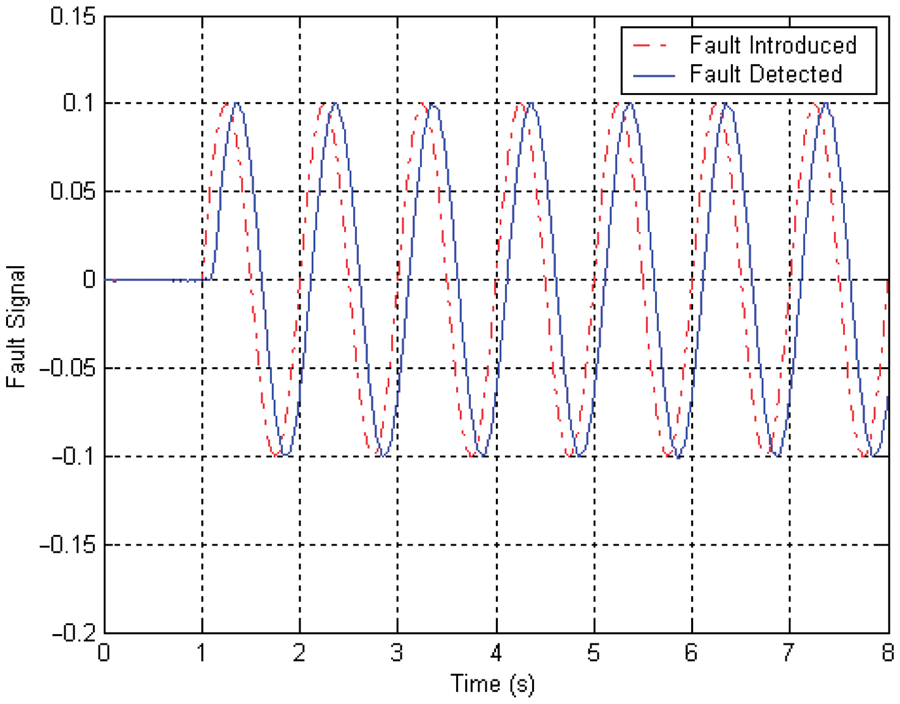
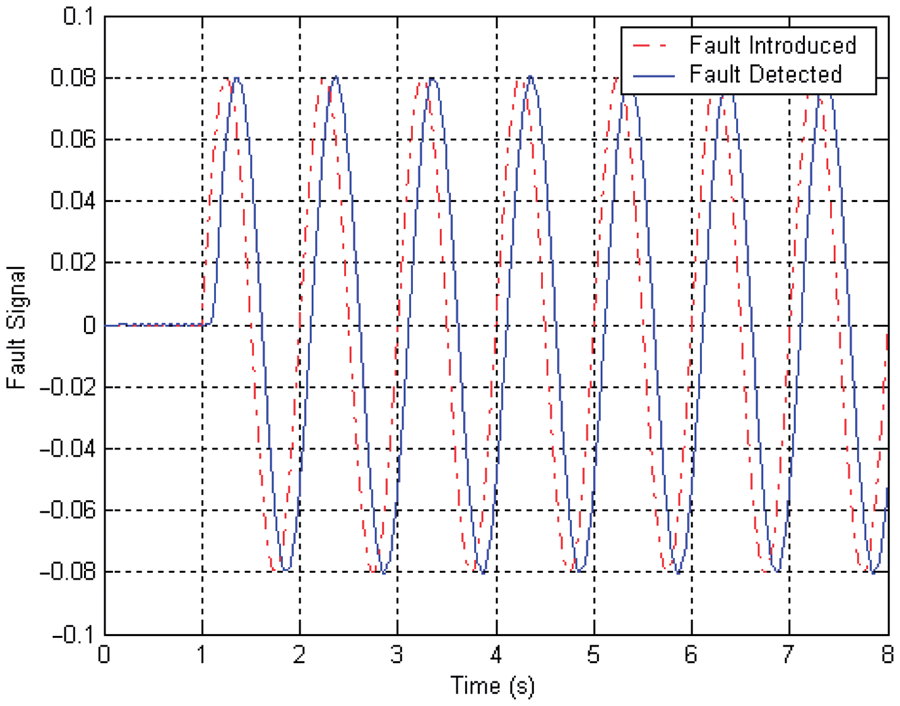
For comparison purposes, another simulation with sine wave faulty input was conducted. Figures 30 to 33 show the faulty input signal and the residual signal. It can be seen that within 1 second of the occurrence of the fault, the residual signal clearly indicated the fault.
Fault identified in sensor 1. Fault identified in sensor 2. Fault identified in sensor 3. Fault identified in sensor 4.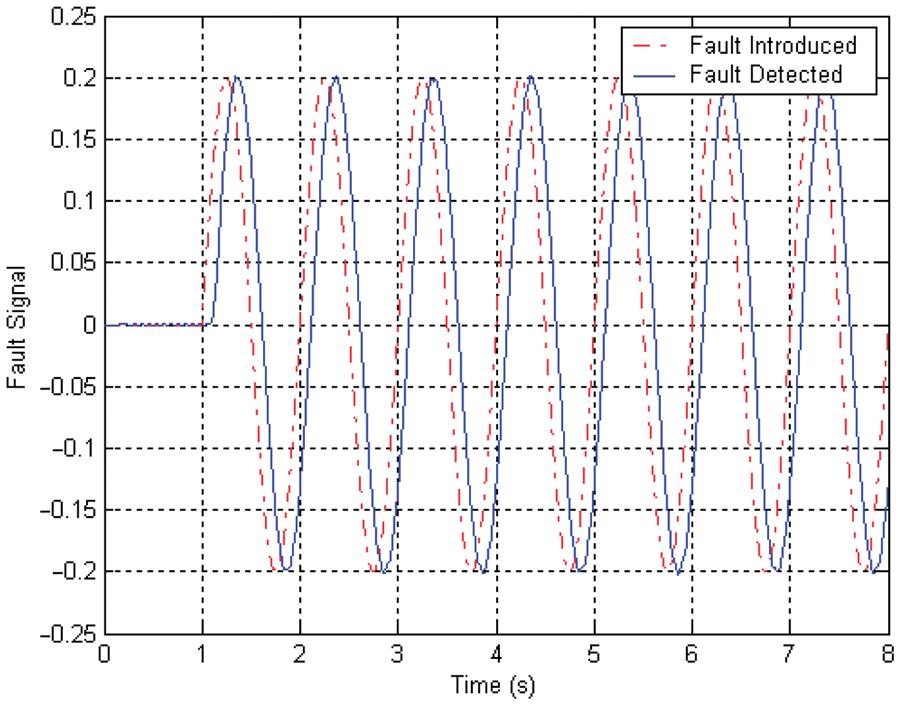
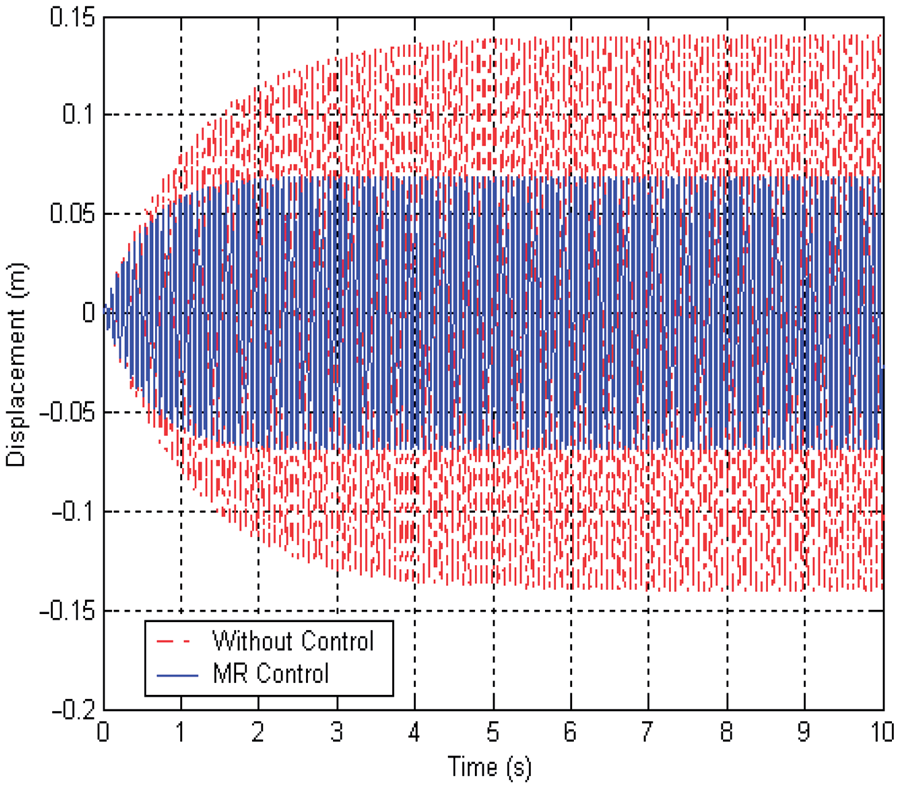
Next, the designed H∞ FTC controller was examined in the MR damper. The structure was excited by a sine wave at 85.95 rad/sec. To simulate the partial failure of sensors, the outputs of the sensor 1, 2, 3 and 4 were reduced to 10%, 20%, 30% and 40% after 5 seconds had elapsed, respectively.
The semi-active control law of the MR damper is
Displacement at tip of truss (with faults). Displacement at tip of truss (without faults).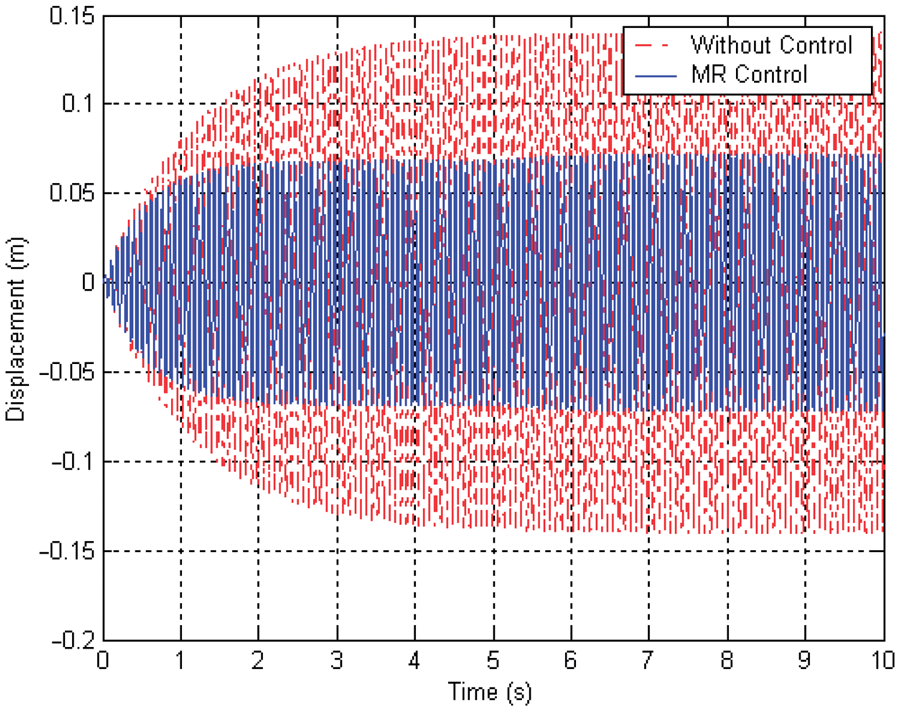

7. Conclusions
In this research, model-based FDI and the solution of the fault tolerant control problem using H∞ techniques are considered for the vibration control of truss structures. An LMI formulation is obtained to design a full order robust H∞ filter to estimate the faulty input signals. The FDI LMI synthesis conditions are obtained by applying the Bounded Real Lemma to the closed loop system. A feasible solution for these conditions forms a convex problem for the full order filter, which is solved via LMI optimization techniques. A fault tolerant H∞ controller is designed for the combined system of plant and filter which minimizes the control objective selected in the presence of disturbances and faults. An 8-bay truss structure is used in validation of the FDI filter and FTC controller designs through numerical simulations. An MR damper is implemented in the truss to reduce the vibration of the truss using a FTC controller. To assist control system design, system identification is conducted for the first vibration mode of the truss. The state space model from system identification is used for the H∞ filter design. The residuals obtained from the filter through simulation are seen following the faults signals. The result shows that the designed FTC controller can achieve effective vibration reduction, though there are partial faulty signals in the outputs of sensors. The numerical simulation results have demonstrated the proposed FDI and FTC in dealing with the faults of sensors of the semi-active control system, however, it is still necessary to experimentally verify the effectiveness of proposed method. The experimental study on the FDI and FTC of truss structures using MR dampers are considered as a future work.
Footnotes
Acknowledgements
LH and GS are grateful for the support of their funding bodies.
Funding
This work was supported by Institute of Space Systems Operations (ISSO) at University of Houston, National Earthquake Special Founding of China (grant number 200808074) and National Natural Science Foundation of China (grant number 50708016 and 51121005).