
Abstract
This work is devoted to investigating the coexistence of anti-synchronization (AS) and complete synchronization (CS) of two identical delay hyperchaotic Lü systems via partial variables. Based on the Lyapunov stability theory, a simple synchronization scheme only with linear inputs is considered. The sufficient conditions of synchronization are also obtained for both linear feedback and adaptive control approaches. The coexistence of AS and CS between two nearly identical delay chaotic systems with unknown parameters is explored. A single input controller is proposed and the adaptive parameter update laws are developed. Numerical simulation results are presented to demonstrate the effectiveness of the proposed chaos synchronization scheme.
Keywords
1. Introduction
Since Pecora and Carrol (1996) introduced a method to synchronize two identical systems with different initial conditions, synchronization of chaotic systems has attracted increasing attention and has been explored intensively. From then, various synchronization phenomena have been observed in coupled chaotic oscillators. Among them there are complete synchronization (CS) (Wang et al., 2005; Ma et al., 2011), phase synchronization (PS) (Ge and Chen, 2004; Fujisaka et al., 2005), lag synchronization (LS) (Shahverdiev et al., 2002; Wang and Shi, 2009), generalized synchronization (GS) (Rulkov et al., 1995; Yang and Hu, 2007), Q-S synchronization (Hu and Xu, 2008; Wang and Shi, 2010), anti-synchronization (AS) (Chiang et al., 2008; Al-Sawalha and Noorani, 2009; Al-Sawalha et al., 2010) and so on.
Among various complex dynamical behaviors, CS is a significant and interesting phenomenon, which can be understood as the adjustment of rhythms or coherence of states by interaction. Due to its theoretical importance and practical applications, CS of a complex system has attracted a great deal of attention of many kinds of science, ranging from physical to chemical, biological, information technology, mathematical, and even of social science (Pecora and Carroll, 1996; Blasius and Stone, 2000; Wang et al., 2005; Ma et al., 2008; 2011; Wang, 2010). Hitherto, many different methods have been used to study CS of a complex chaotic system (Lu et al., 2004; Luo, 2009). At the same time, countless researchers have taken much interest in AS. As a special case of GS, chaos AS can be characterized by the vanishing of the sum of relevant variables. The AS phenomenon has been observed experimentally and numerically in the coupled chaotic systems (Al-Sawalha and Noorani, 2009). It is a noticeable phenomenon in the chaotic system that has an important significance in application. For instance, using AS to lasers, it is possible to generate not only drop-outs of the intensity with ordinary low frequency fluctuations but also short pulses of high intensity, which offers new ways for generating pulses of special shapes. Using AS to communication systems, digital signals may be transmitted by the transform between synchronization and AS continuously, which will strengthen security and secrecy. Therefore, many researchers focus on the topic of AS. In most cases of drive-response synchronization, all the states of the response system synchronize to the corresponding states of the drive system in terms of the same synchronization regime. Does the phenomenon that part of the states of the interactive systems are synchronized in terms of one type of synchronization regime, and other states synchronized in terms of another type exist in unidirectionally and linearly coupled chaotic systems? There is no doubt that it is an interesting problem.
It is well known that time delay is ubiquitous in most physical, chemical, biological, neural and other natural systems(Ghosh et al., 2008). As the dynamical systems given by delay differential equations (DDEs) have an infinite dimensional state space, usually the attractors of the solutions are high dimensional (Liu and Su, 1998). Many large-scale and complicated systems in nature and society can be modeled as DDEs. Since their flexibility and generality for representing virtually any natural and man-made structure (Najar et al., 2010), time delay systems have received much attention in interdisciplinary subjects. Therefore, it is invited to investigate the coexistence of AS and CS of time delay chaotic systems by using partial variables for both theoretical research and practical applications (Chen et al., 2009; Zhang et al., 2010).
In this paper, it will be shown that the coexistence of AS and CS between two identical delay hyperchaotic Lü systems can be achieved only by partial variables. Based on the Lyapunov stability theory, a simple synchronization scheme with only single linear feedback controllers is proposed, and sufficient conditions for achieving the coexistence of AS and CS are derived. Numerical simulation results are presented to demonstrate the effectiveness of the proposed synchronization scheme.
2. System description
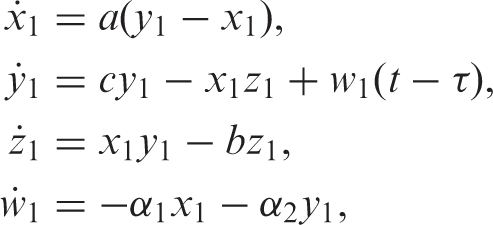
In this paper, the considered hyperchaotic system with time delay is described as
2D overview hyperchaotic attractor of equation (1) with a = 35, b = 3, c = 20, 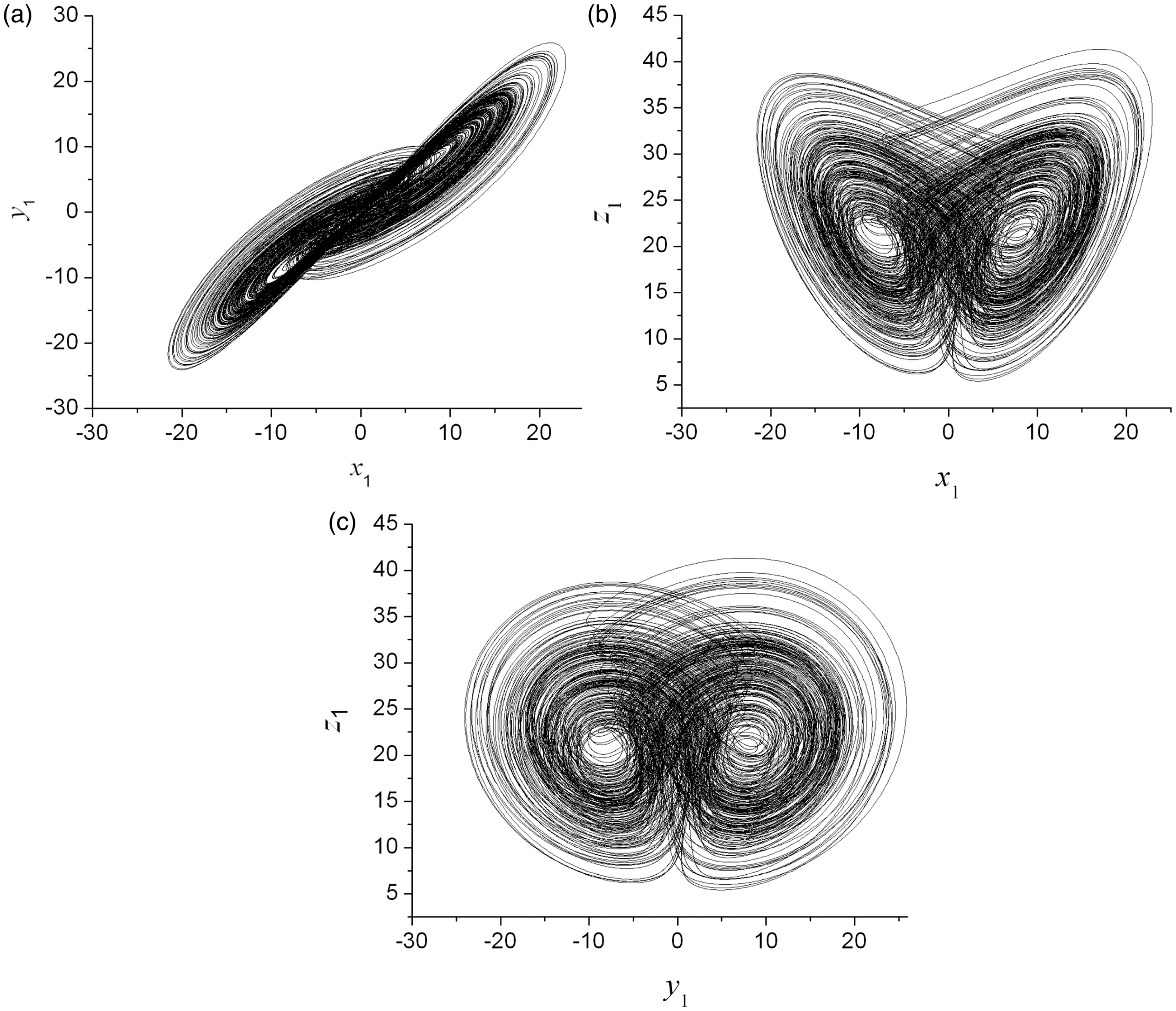
3. Coexistence of anti-synchronization and complete synchronization of delay hyperchaotic Lü systems via partial variables
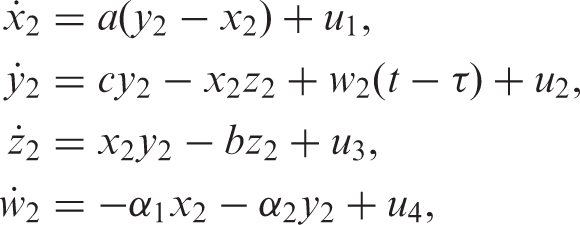
In the following subsections, the coexistence of AS and CS of two identical delay hyperchaotic Lü systems via partial variables will be investigated. For convenience, the drive system is chosen as (1) and the response system is given as the following forms:
In fact, a smaller number of controllers and a simpler form of controllers are greatly practical. The target of this paper is to find simple controllers, so that when the controllers are chosen, the state variables

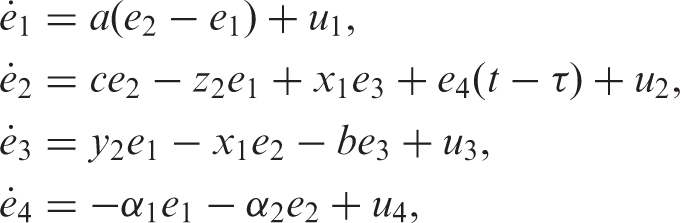
It follows from (1) and (2) that the error system (3) is governed by the following dynamical system:
The control goal is to propose a simple controller scheme via partial input variables so that the state errors in (4) satisfy
With this in mind, the proposed schemes are described as follows.
3.1. Coexistence of anti-synchronization and complete synchronization of delay hyperchaotic Lü systems via three linear controllers
In the first case, we will show the coexistence of synchronizations by using three linear feedback controllers. If the following linear control law is applied to system (2),
Calculating the time derivative of the Lyapunov function (7) along the trajectory of system (4) arrives at
Since a chaotic system has bounded trajectories, there exists a positive constant M, such that It is obvious that, for suitable values of λ, β and sufficient large values of Theorem 1


3.2. Coexistence of anti-synchronization and complete synchronization of delay hyperchaotic Lü systems via two controllers
Secondly, we will show the coexistence of synchronizations by using two controllers. The control laws proposed in Theorem 1 have fixed feedback gains no matter how many the initial error values start. It means that the feedback gains must be maximal induced a kind of waste in practice. In this Section, the adaptive control technology is applied to accomplish the synchronization of two identical delay hyperchaotic Lü systems. If the adaptive controller law is selected as
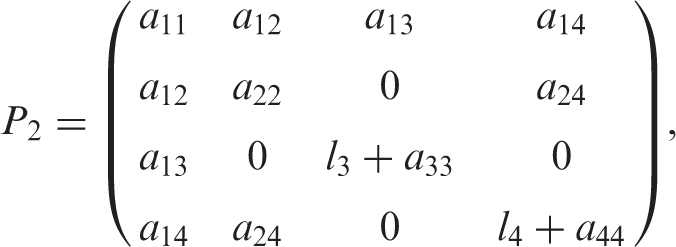
The positive definite Lyapunov function is chosen as following
Calculating the time derivative of the Lyapunov function (13) along the trajectory of system (4) arrives at
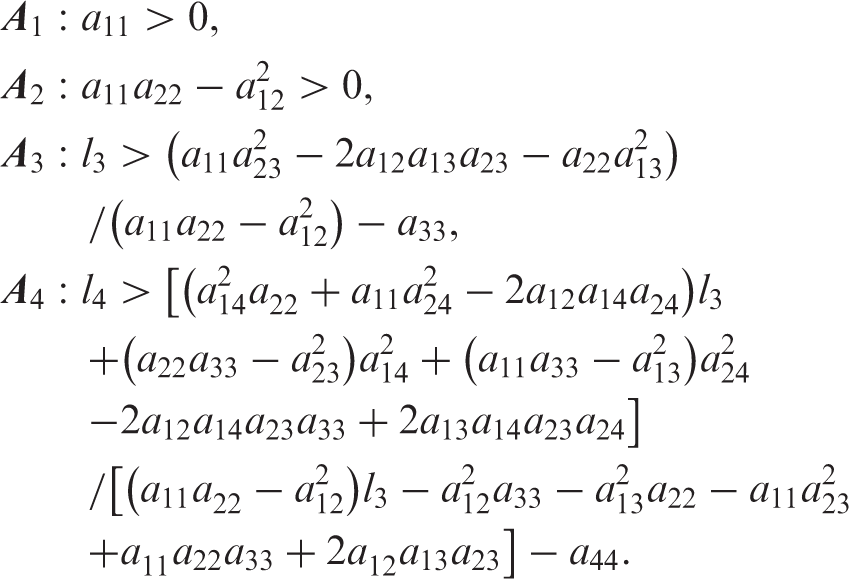
Since a chaotic system has bounded trajectories, there exists a positive constant M, such that Denote
For suitable values of λ, β and sufficient large values of l3, l4, the conditions Theorem 2
Proof


3.3. Coexistence of anti-synchronization and complete synchronization of delay hyperchaotic Lü systems with mismatched parameters via a single adaptive feedback control with a single variable
In practical applications, some or all of the system parameters cannot be exactly known in advance. Therefore, the synchronization of chaotic systems in the presence of unknown system parameters is essentially to be studied. In the following, the aforementioned adaptive control law is used to synchronize two nearly identical delay hyperchaotic Lü systems with unknown parameters in the response system in spite of the difference in initial conditions.
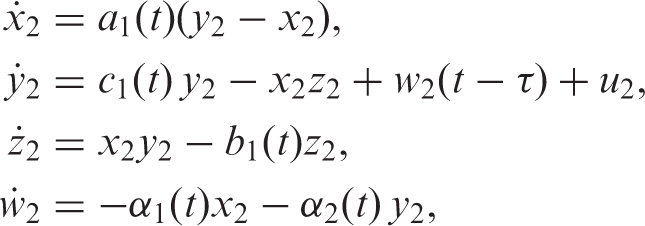
For this case, the drive system is designed as (1) and the response system is modeled as following:
If the adaptive controllers are taken as
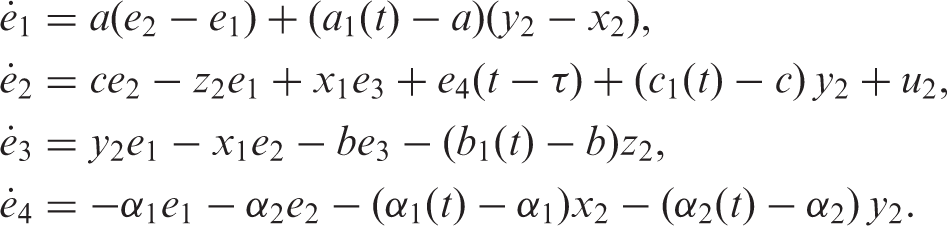
It follows from (1) and (18) that the error (3) is governed by the following error dynamical system:
Construct a positive definite Lyapunov function as following:
Calculating the time derivative of the Lyapunov function (22) along the trajectory of system (21) associated with control law and estimated parameters law, we have
Since a chaotic system has bounded trajectories, there exists a positive constant M, such that Denote
It is obvious that, for suitable values of λ, β and l2, the conditions Theorem 3
Proof


4. Illustrative numerical simulation examples
In this Section, some numerical examples are presented to illustrate the theoretical analysis. In the following numerical simulations, the system parameters are selected as a = 35, b = 3, c = 20,
When the controllers are taken as in Theorem 1, the time evolution curves of two systems with the controller (6) (where Time evolution curves of two systems with the controllers in Theorem 1, where Dynamics of synchronization error states in Theorem 1 when 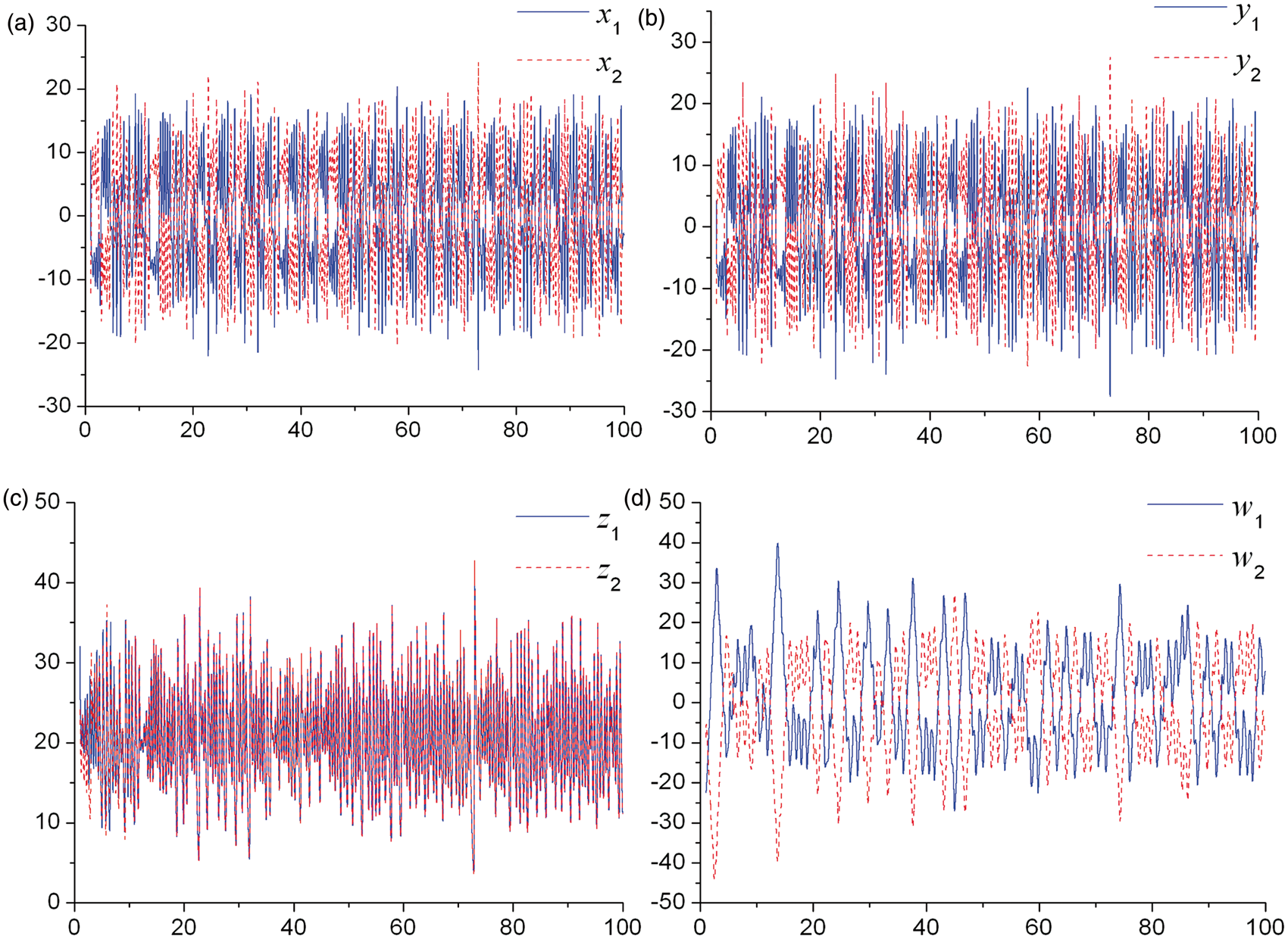
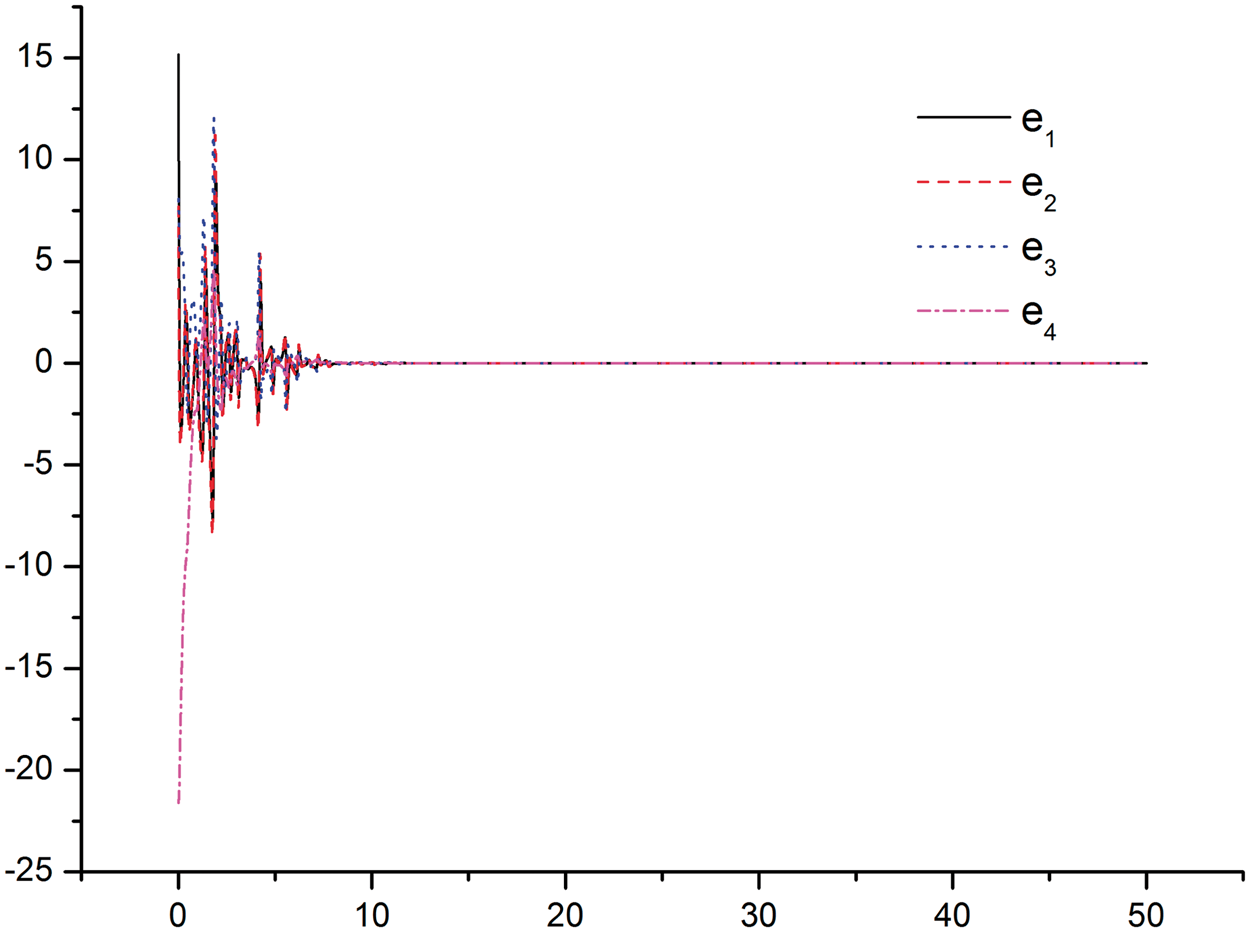
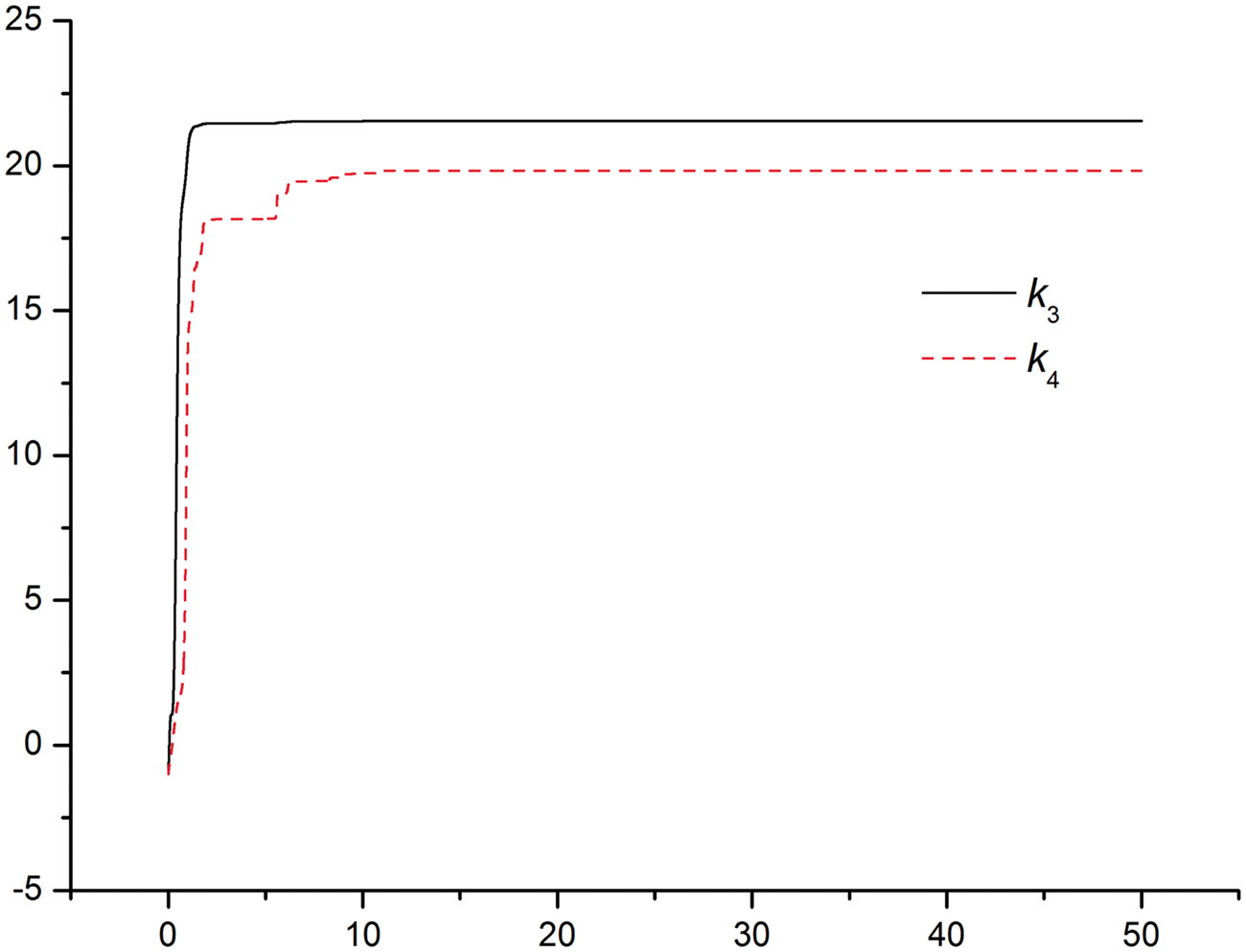
When the controllers are chosen as in Theorem 2, the time evolution curves of the drive system and the response system are depicted in Figure 4. The synchronization errors are shown in Figure 5. The estimation of feedback gains k3 and k4 are drawn in Figure 6. From the numerical simulation results, it is obvious to obtain that coexistence of AS and CS of the two identical delay hyperchaotic Lü systems with different initial conditions are indeed achieved.
Time evolution curves of two systems (a) (x1, x2), (b) (y1, y2), (c) (z1, z2), (d) (w1, w2). Dynamics of synchronization error states e1, e2, e3 and e4 with the controllers in Theorem 2. The estimation of k3 and k4 in Theorem 2.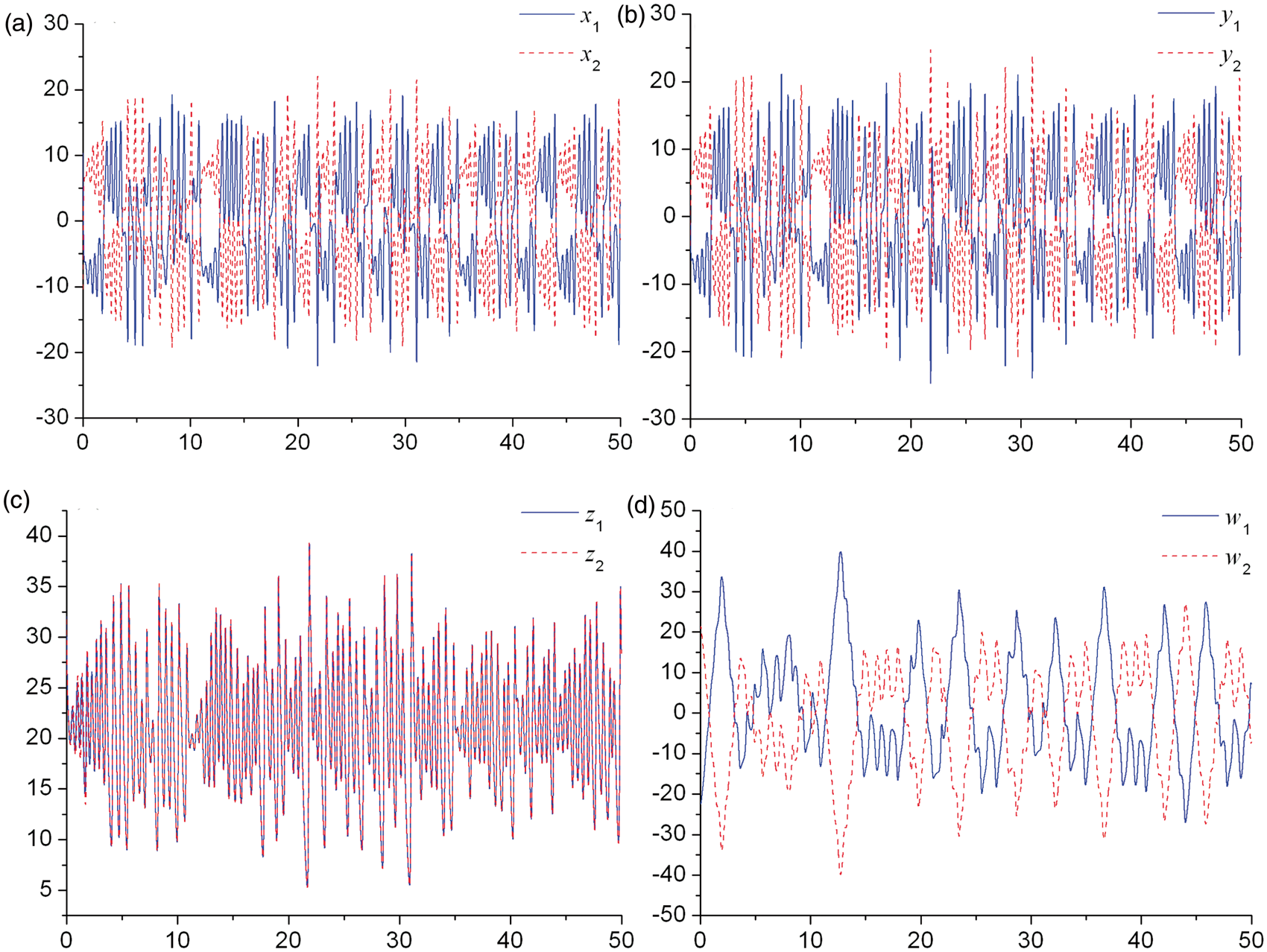
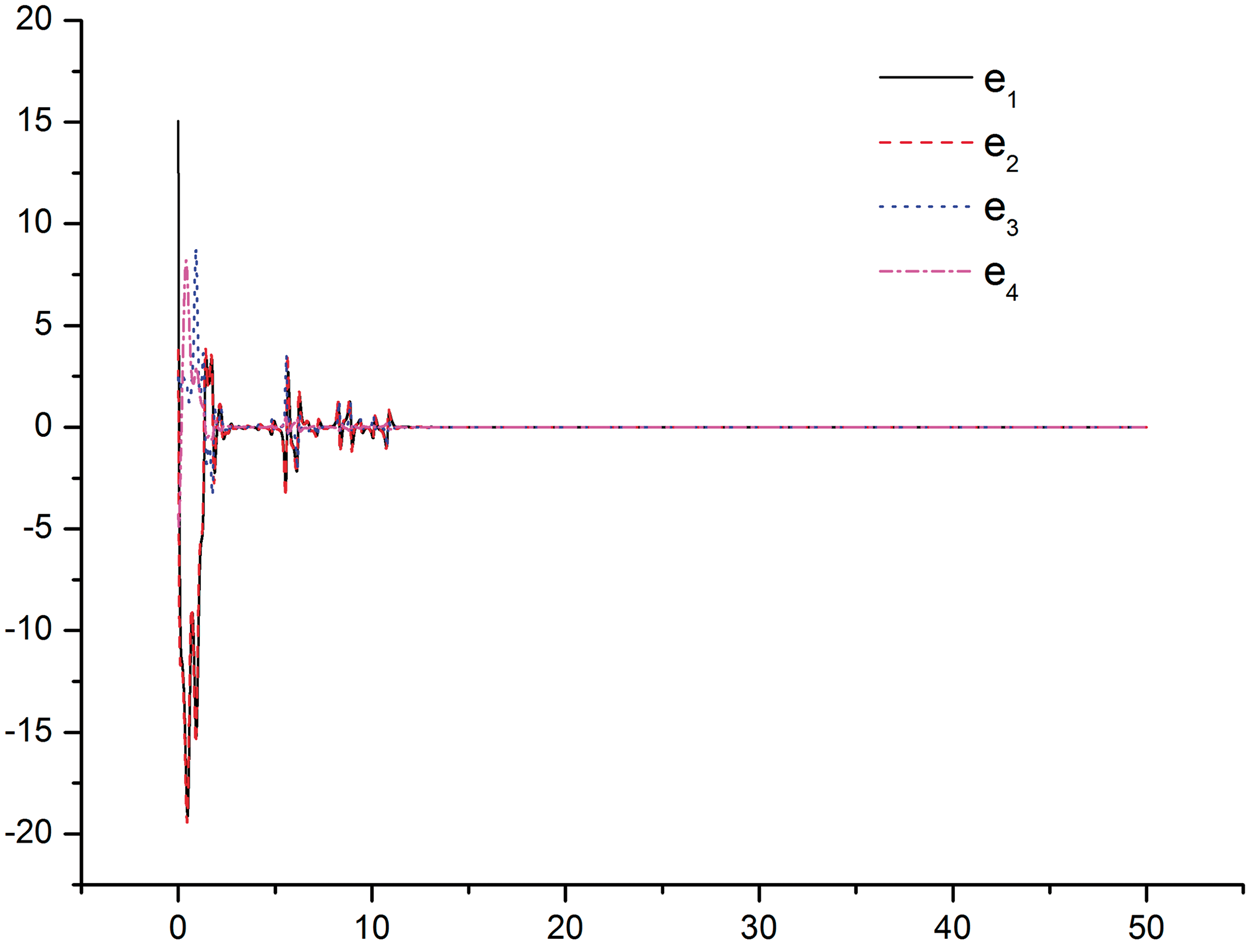
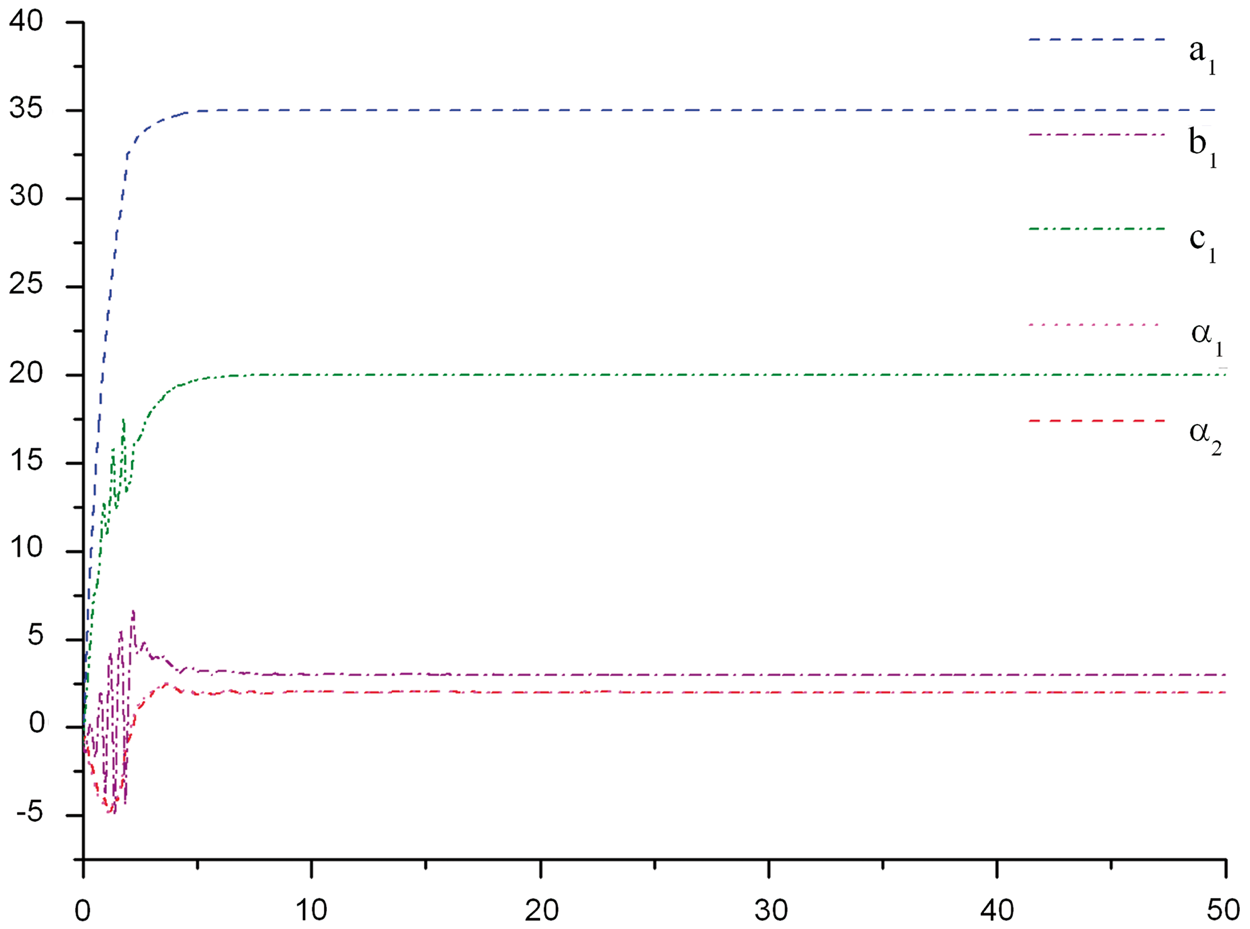
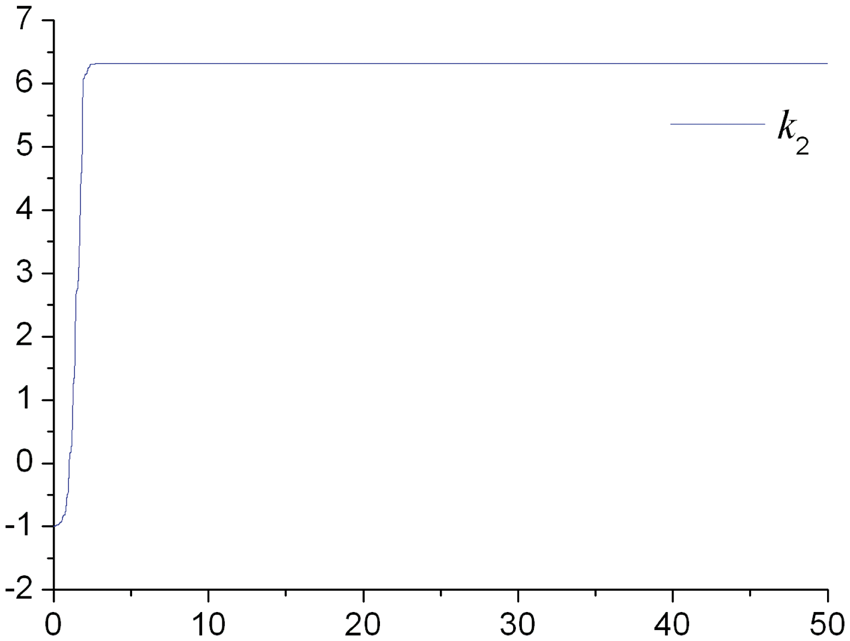
When the controller is chosen as in Theorem 3, the time evolution curves of the systems (1) and (18) are depicted in Figure 7. The synchronization errors are shown in Figure 8, respectively. The estimations of the parameters are drawn in Figure 9. The estimation of feedback gain k2 is plotted in Figure 10. From these figures, it is obvious to obtain that the synchronization errors converge to zero asymptotically and two parameters mismatched systems have indeed achieved synchronization.
Time evolution curves of two systems (a) (x1, x2), (b) (y1, y2), (c) (z1, z2), (d) (w1, w2). Dynamics of synchronization error states e1, e2, e3 and e4 with the controller in Theorem 3. The estimations of the unknown parameters in the response system in Theorem 3. The estimation of k2 in Theorem 3.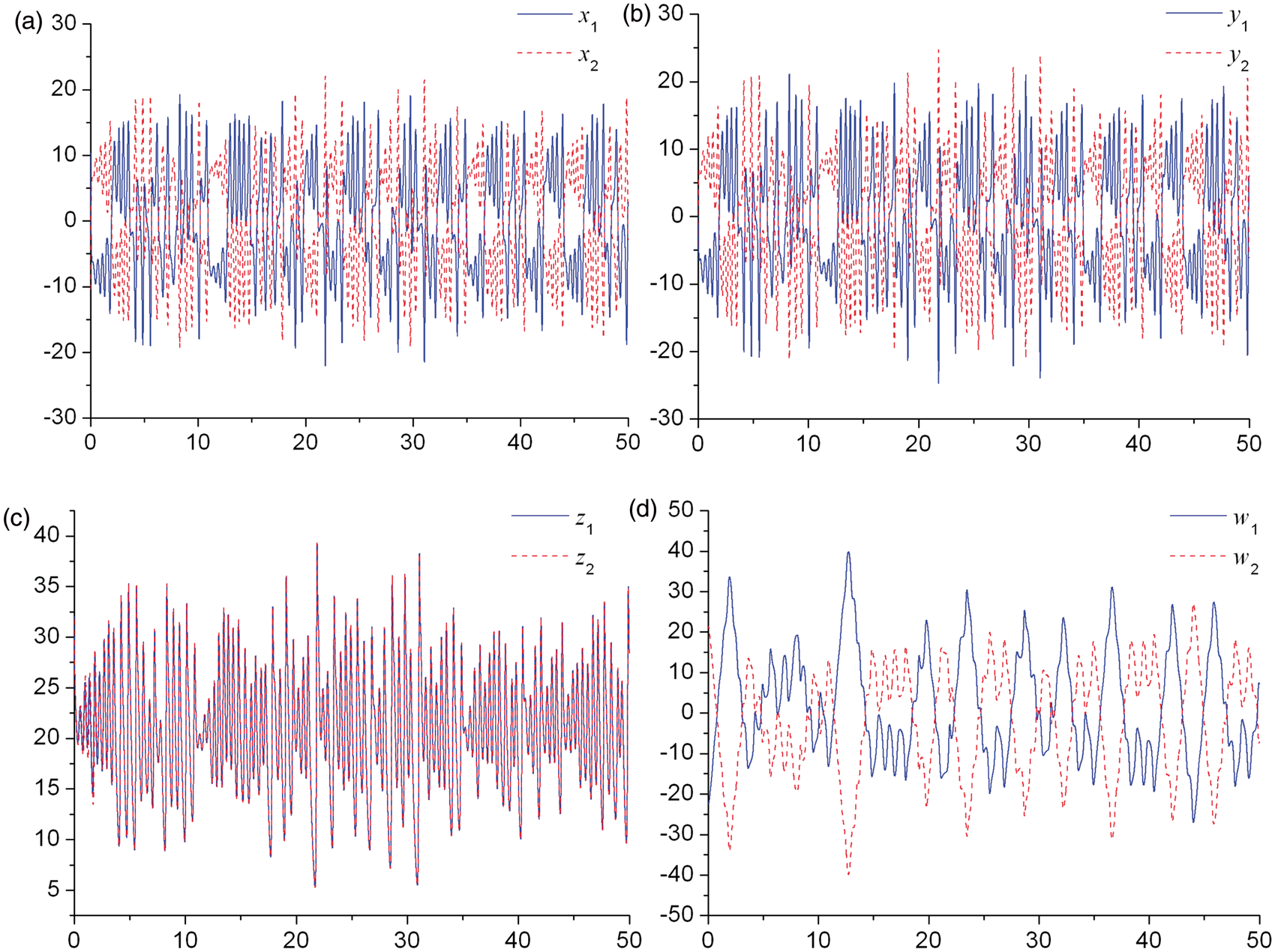

5. Conclusion
In this paper, we investigate an intriguing coexistence phenomenon of AS and CS of two coupled delay hyperchaotic Lü systems via partial variables and the adaptive linear feedback control methods, which are simple, efficient, and easy to implement in practical applications. Analytical results show that under suitable conditions, two complex delay hyperchaotic systems can realize the coexistence of AS and CS, namely, the state variables x2, y2 and w2 in response system are anti-synchronized to x1, y1 and w1 in drive system, respectively, while the third state z2 in the response system complete synchronizes with z1 in driving system. Furthermore, numerical simulations are provided to show the effectiveness of the developed methods.
Footnotes
Funding
This work is supported by National Natural Science Foundation of China (grant numbers 11102180 and 51178157) and the Natural Science Foundation of the Jiangsu Higher Education Institutions of China (grant number 10KJB120005).