
Abstract
This paper presents simulation and experimental studies of controls for time-delayed dynamical systems. An inverted pendulum made by Quanser is used as a model system. We investigate two control design methods: optimal feedback gain with the semi-discretization method and a high-order control design. Both simulations and experiments are carried out to demonstrate the utility of the control. The semi-discretization method offers optimal controls without increasing the dimensions of the gain vector, while high-order control involves an increased number of gains. The disadvantages and advantages of both methods are discussed with the support of simulation and experimental results. This paper highlights the fact that high-order control is determined by an Nth order filter where N is the discretization level. We have also found that the performance of high-order control appears to be insensitive to N.
1. Introduction
There is growing interest in the analysis, control and applications of dynamical systems with time delays. Time delay can be part of the system's properties. It can also arise in the control system when there is a signal transport time lag or a delay due to the hardware of the digital controller. The latter is the focus of this paper. In particular, we investigate two control design methods to deal with the time delay in control, and evaluate the performance of the controls designed by these methods with the help of simulations and experiments.
Many engineering applications involve time delay. Space teleoperation and control of unmanned aerial vehicles (UAVs) are notorious for transport delays (Nohmi and Matsumoto, 2002; de Vries, 2005). Singh (1995) has developed a time-delay filter for fuel–time optimal control. Ha and Ly (1996) studied a sampled-data control system with consideration of computational time delay. Time-delayed feedback control was also designed by Fujii et al. (2000) to regulate the librational motion of gravity–gradient satellites in an elliptic orbit. Olgac and his associates have published extensively on the use of delayed resonators for vibration suppression (see Filipovic and Olgac, 1998 for an example). Ali et al. (1998) carried out a study on the stability and performance of feedback controls with multiple time delays by considering the roots of the closed-loop characteristic equation. The of model predictive control also offers a good tool for dealing with time delay (Dumont et al., 1993; Normey-Rico and Camacho, 1999; Rawlings, 2000). Pinto and Goncalves (2002) fully discretized a nonlinear single degree of freedom (SDOF) system to study control problems with time delay. Klein and Ramirez (2001) studied multiple degree of freedom (MDOF) delayed optimal regulator controllers with a hybrid discretization technique where the state equation was partitioned into discrete and continuous portions. Stepan (1998) and Yang and Wu (1998) studied structural systems with time delay. A method using Chebyshev polynomials to approximate general nonlinear functions of time has been developed to handle linear and nonlinear time-delayed periodic systems (Ma et al., 2003, 2005; Deshmukh et al., 2006, 2008; Butcher and Bobrenkov, 2009). This method has also been applied to study optimal control problems.
The stability of delayed dynamical systems has been extensively studied in the literature, and the Lyapunov approach is a popular method (Wu and Mizukami, 1995; Kapila and Haddad, 1999; Gu and Niculescu, 2003). Garg et al. (2007) developed a temporal finite element method to study the stability of time-delayed systems with parametric excitations. Kalmar-Nagy (2005) made use of the piece-wise exact solution of linear differential equations with a single time delay to create a map for stability analysis of the system. Gu and Niculescu (2003) presented an excellent survey of the stability and control of time-delayed systems.
For time-invariant linear systems with time delay, several methods are available for the design of proportional-integral-derivative (PID) controls and their stability analysis. Methods of root locus and Nyquist criterion are quite mature. The Smith predictor is a well-known method (Smith, 1957) that proposes a compensator to stabilize the feedback control designed for the system without time delay. The semi-discretization (SD) method is a well established method in the literature and is used widely in structural and fluid mechanics (Pfeiffer and Marquardt, 1996; Leugering, 2000). This method has been applied to delayed dynamical systems by Insperger and Stepan (2001, 2002), and later extended to study delayed feedback controls (Sheng et al., 2004; Sheng and Sun, 2005). Recently, Insperger and Stepan (2011) published a comprehensive and general overview of the semi-discretization method. The continuous time approximation (CTA) method is an extension of the method of semi-discretization and provides an alternative to handling multiple independent time delays (Sun, 2008; Song and Sun, 2011). Deshmukh et al. (2006) and Butcher and Bobrenkov (2009) have applied Chebyshev collocation to the CTA method. The Chebyshev CTA method provides the most accurate solution of time-delayed dynamical systems.
The remainder of this paper is organized as follows. Section 2 describes the mathematical model of the experimental system made by Quanser. Section 3 discusses the control designs. Section 4 presents the simulation and experimental results of the controls, and compares their performances. Section 5 concludes the paper.
2. The system
The experimental apparatus made by Quanser is shown in Figure 1. It consists of a rotary arm and a rigid rod pendulum. The rotary arm swings horizontally to control the motion of the pendulum. The control objective in this experiment is to stablize the inverted vertical position of the pendulum.
The inverted pendulum apparatus made by Quanser, Canada.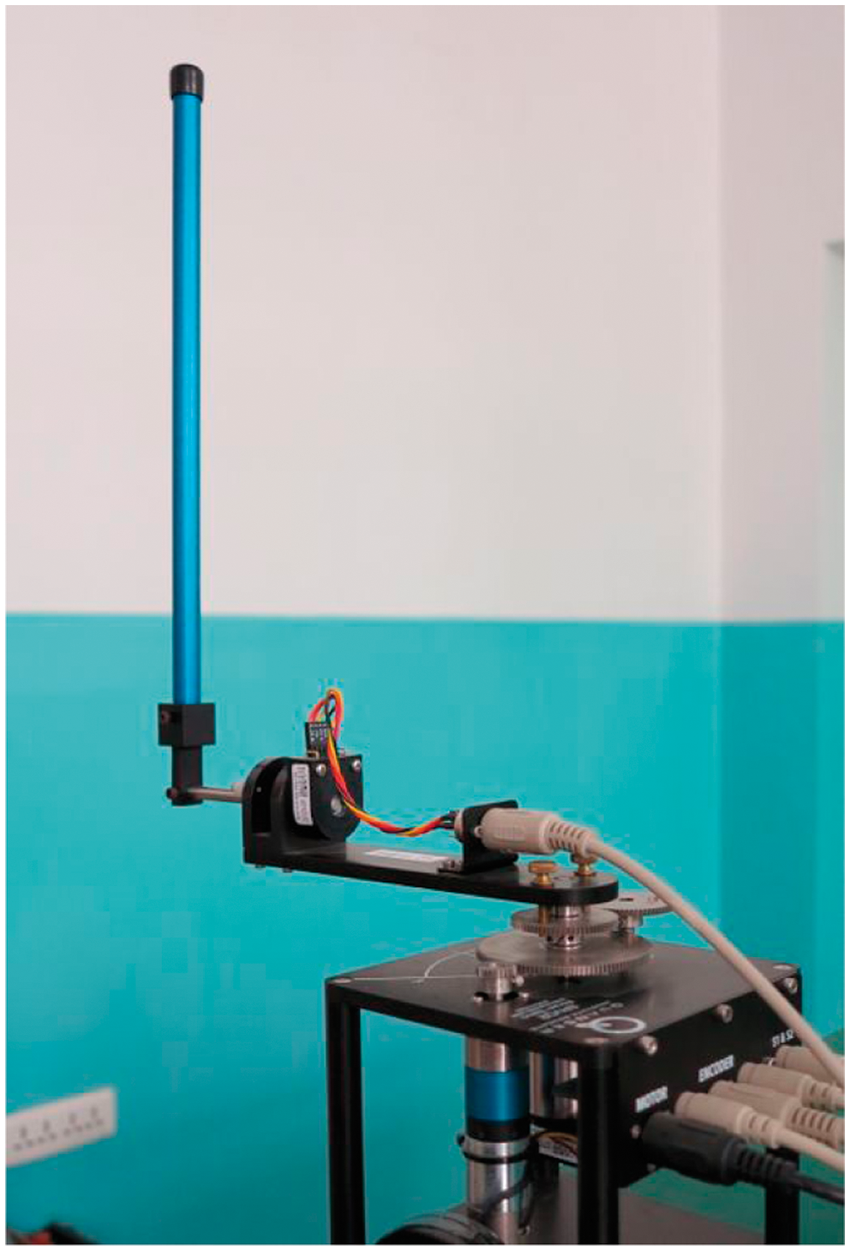
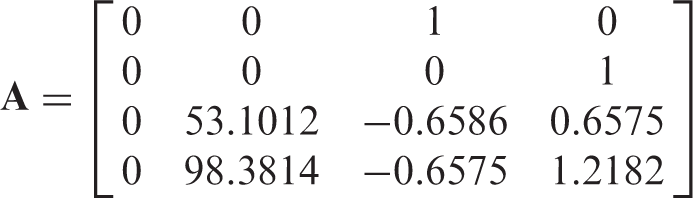
The linearized state equation of the system when the pendulum stands upward can be derived as


3. Control designs
3.1. The linear quadratic regulator design
When there is no time delay in the system, linear quadratic regulator (LQR) optimal control of the inverted pendulum with full state feedback u(t) = −


We use this control as the baseline, and digitally introduce time delay to it so that u(t) = −
3.2. The semi-discretization method design
Now assume that the system has a time delay τ = 0.032 s. We apply the semi-discretization method to design the gain for the control u(t) = −

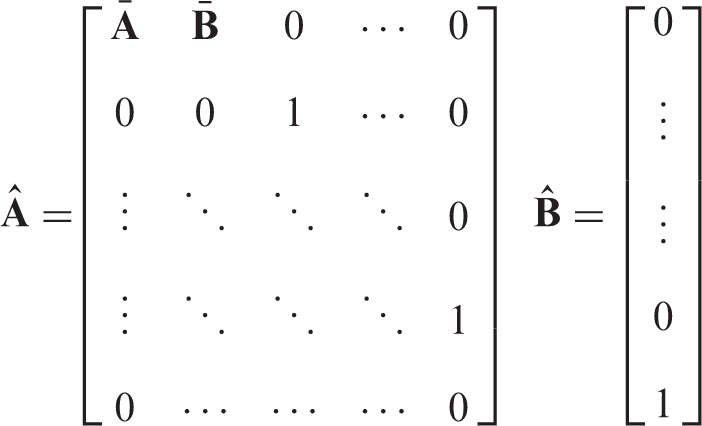
The semi-discretization method leads to a mapping of the extended state vector over the time delay τ

The stability of the control system is determined by the eigenvalues of the mapping

If we restrict our interest to a finite and compact region

This optimization formulation offers a different approach to the design of feedback controls for linear systems with time delay. The design criterion is to maximize the decay rate of the extended state vector

The optimal gain
In region
3.3. The high-order control design
Rewrite equation (1) with an explicit time delay τ of the control



Define an extended state (4 + N) × 1 vector as

Then, equation (12) can be written in terms of the extended vector without time delay as

Consider a full extended state feedback control

We should also point out that if an integral transformation is introduced to convert the system to one without time delay, as is done in Cai et al. (2003), and the control design is done in the continuous time domain, the filter to determine the control would be in an integration form, which can be discretized leading to the same digital filter as in equation (17).
The feedback gain of high-order control can be designed with the digital LQR optimal control formulation to minimize a cost function


For the inverted pendulum, we choose N = 8.


4. Numerical and experimental results
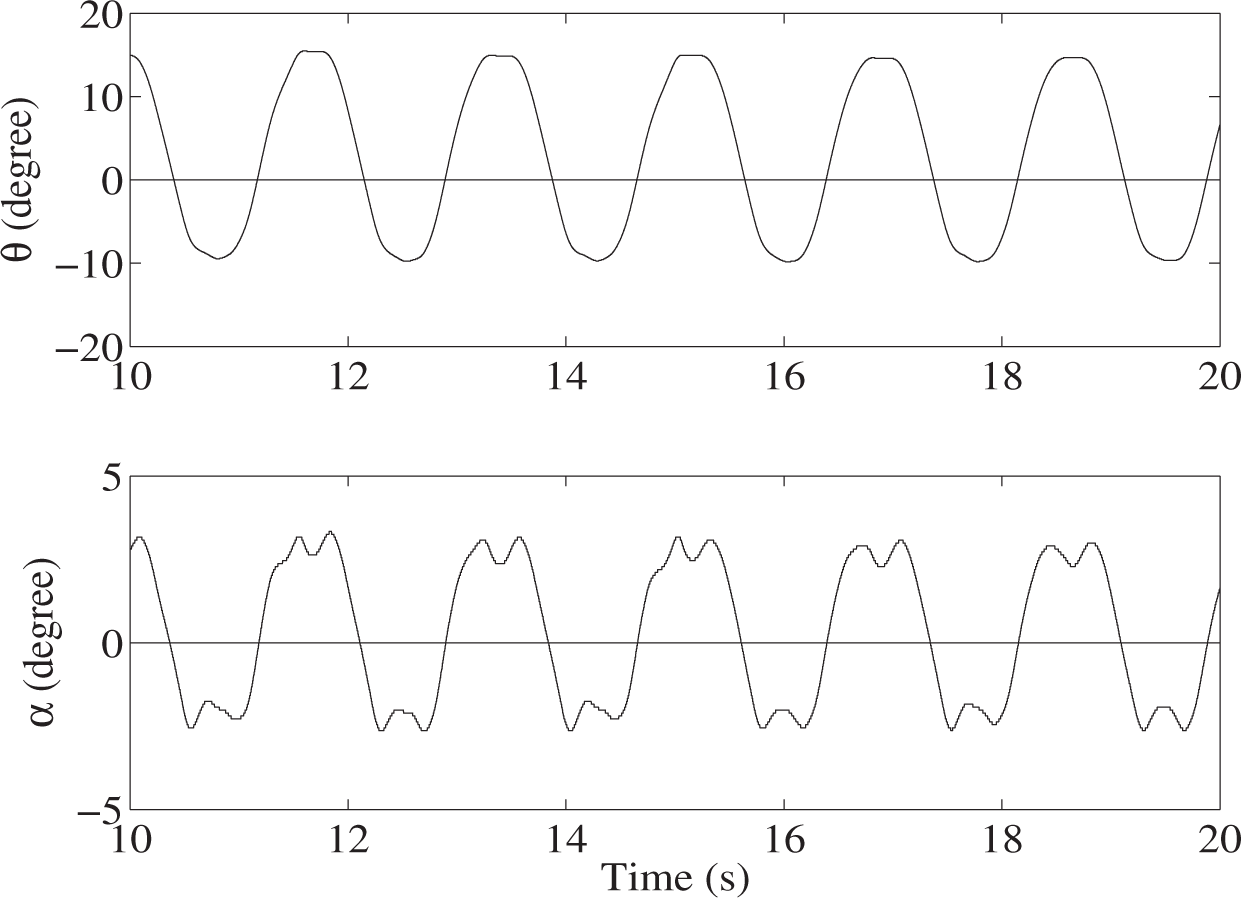
We have carried out extensive numerical simulations and experimental investigations of the inverted pendulum in Figure 1. Figure 2 presents the experimental results of LQR optimal control with the gain in equation (5) without time delay. In the steady state, the angle α oscillates with a peak-to-peak amplitude of 3.1641°. This represents the baseline of the control system.
The steady-state response of the inverted pendulum system under LQR control without time delay. θ is the angle of the rotary arm and α is the angle of the inverted pendulum. The control objective is to minimize θ and α so as to stabilize the inverted pendulum at α = 0.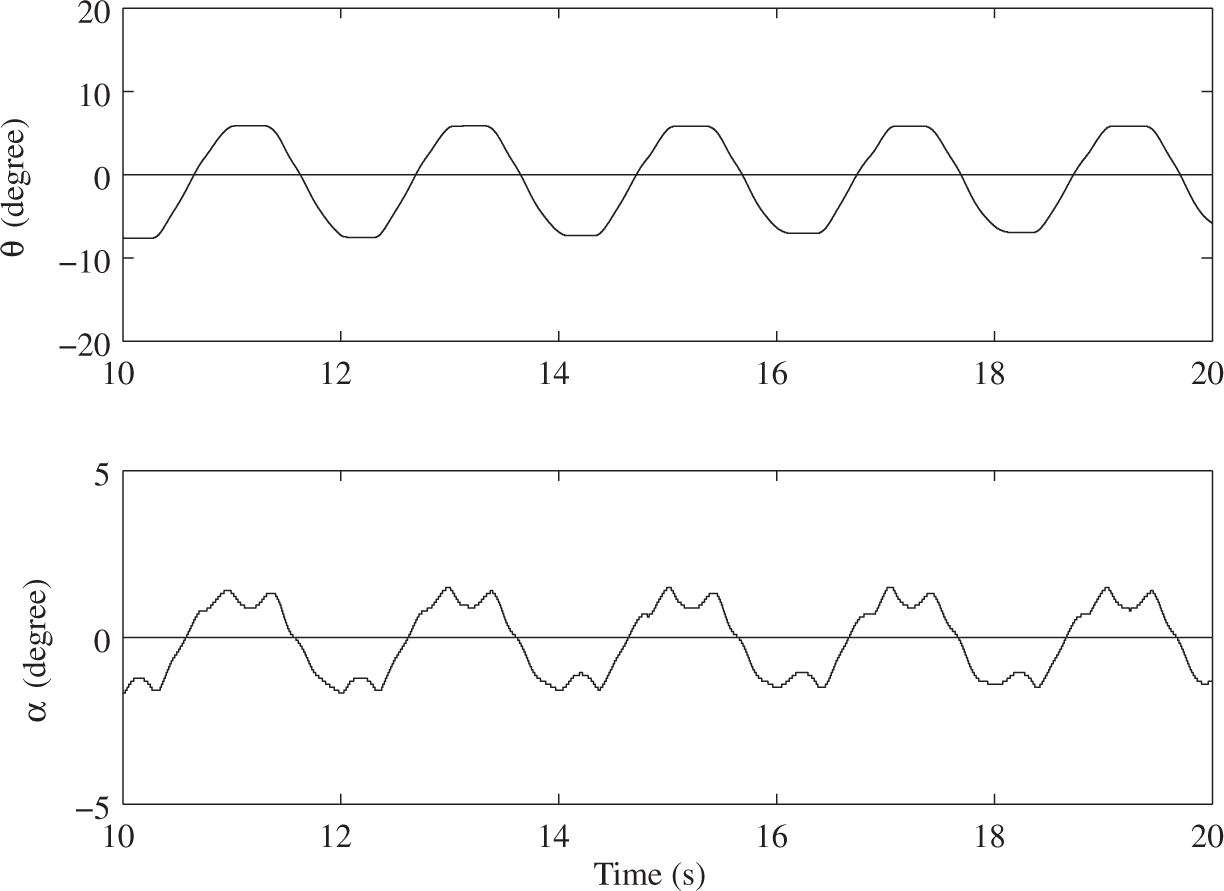
We then gradually and digitally introduce time delay to the control, until the delay reaches 32 ms when the experiment goes unstable as shown in Figure 3. Next, we implement the controls designed with consideration of time delay.
The unstable response of the inverted pendulum when the LQR control has a time delay of τ = 0.032 s. The LQR control is designed without consideration of time delay. θ is the angle of the rotary arm and α is the angle of the inverted pendulum. The control objective is to minimize θ and α so as to stabilize the inverted pendulum at α = 0.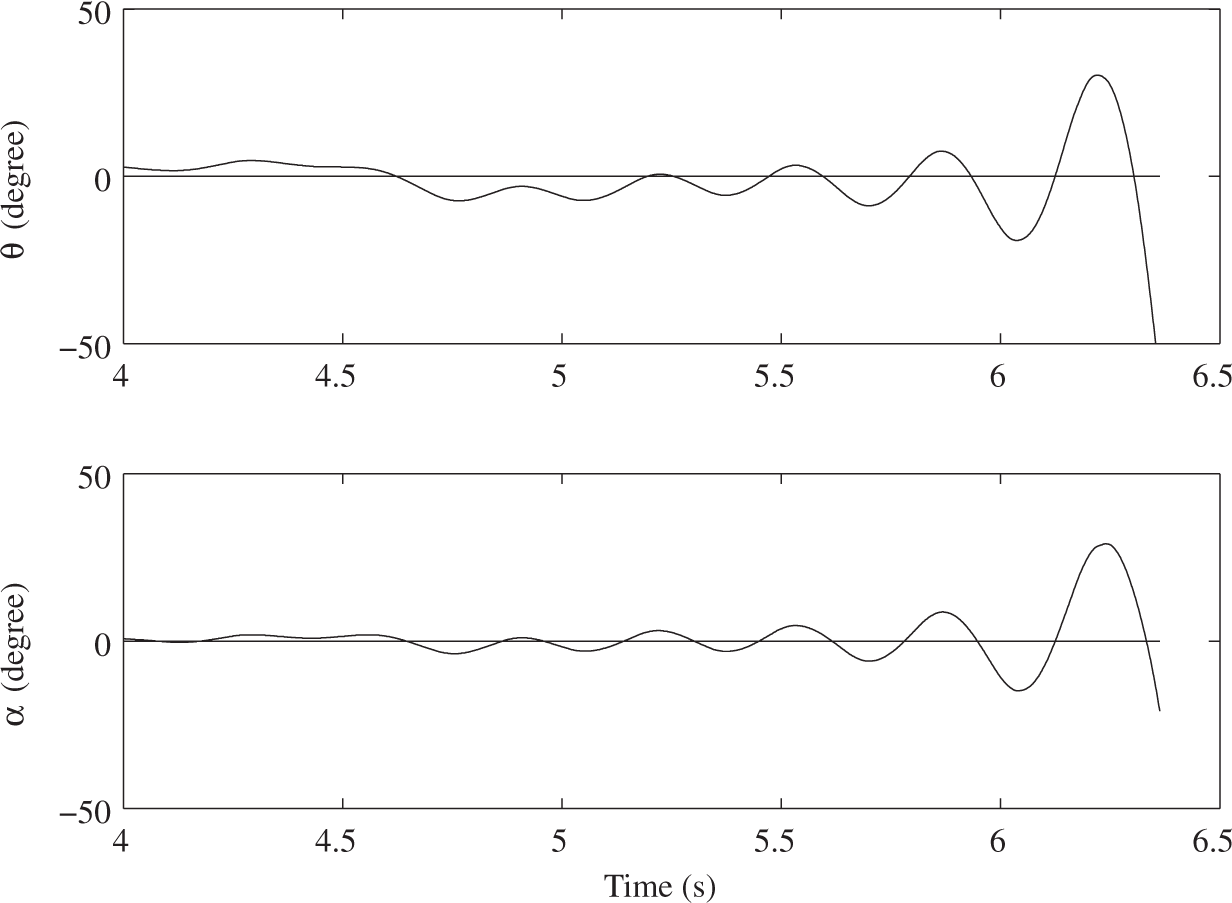
4.1. Control with the semi-discretization method
We first implement the control designed with the semi-discretization method and N = 32. The control gain is Simulation of the inverted pendulum under control designed with the semi-discretization method. Experimental transient response of the inverted pendulum under control designed with the semi-discretization method. The steady-state response of the inverted pendulum under control designed with the semi-discretization method. 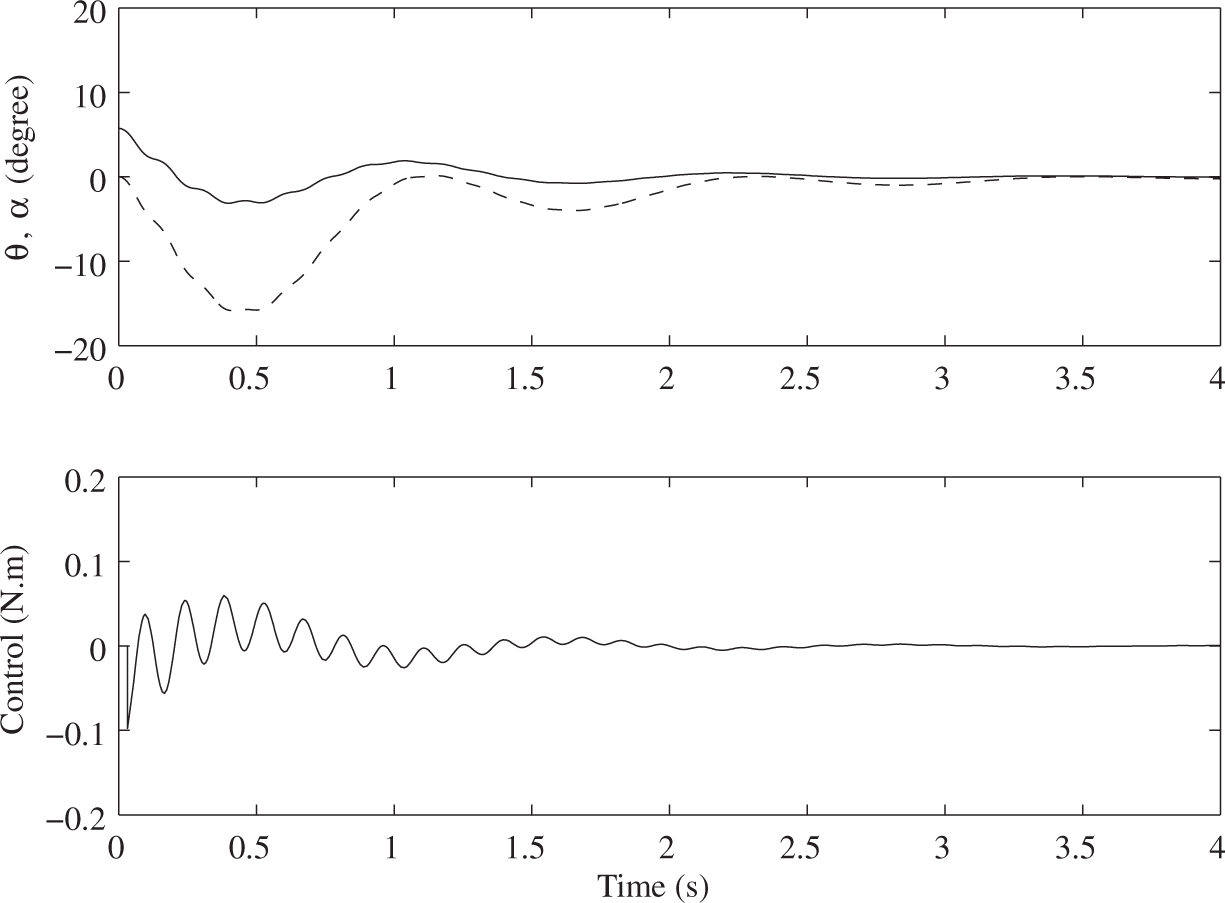
A note on the initial condition and the transient response of the control experiment is in order. The inverted pendulum controller provided by Quanser includes two parts. The first part destabilizes the downward position and swings the pendulum up. When the pendulum is within about ±5°, the second part starts to stabilize the upward position. At the moment when the stabilizing control starts, the initial conditions for control are random. The control considered in this paper is the second part. Hence, the transient response in Figure 5 does not accurately show the rise time of the control.
4.2. High-order control
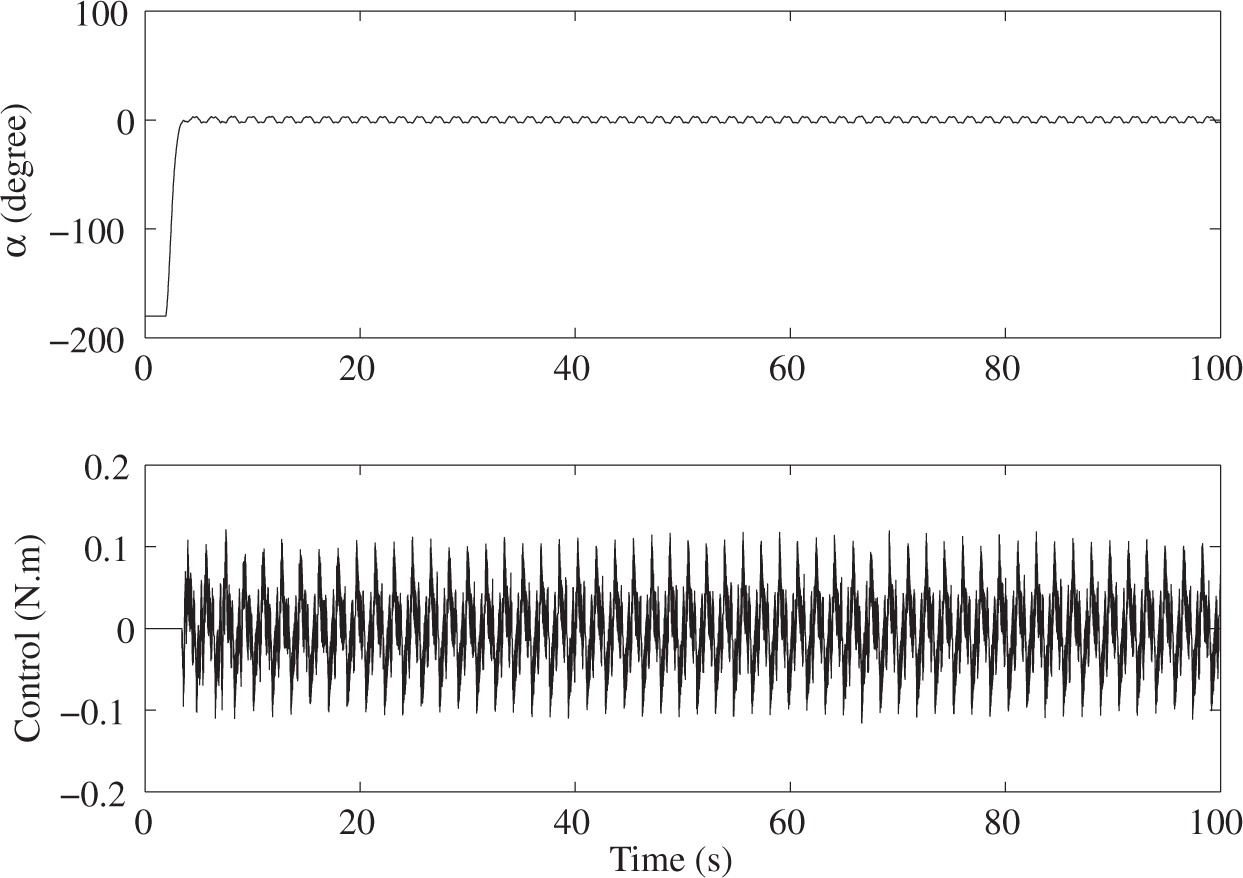
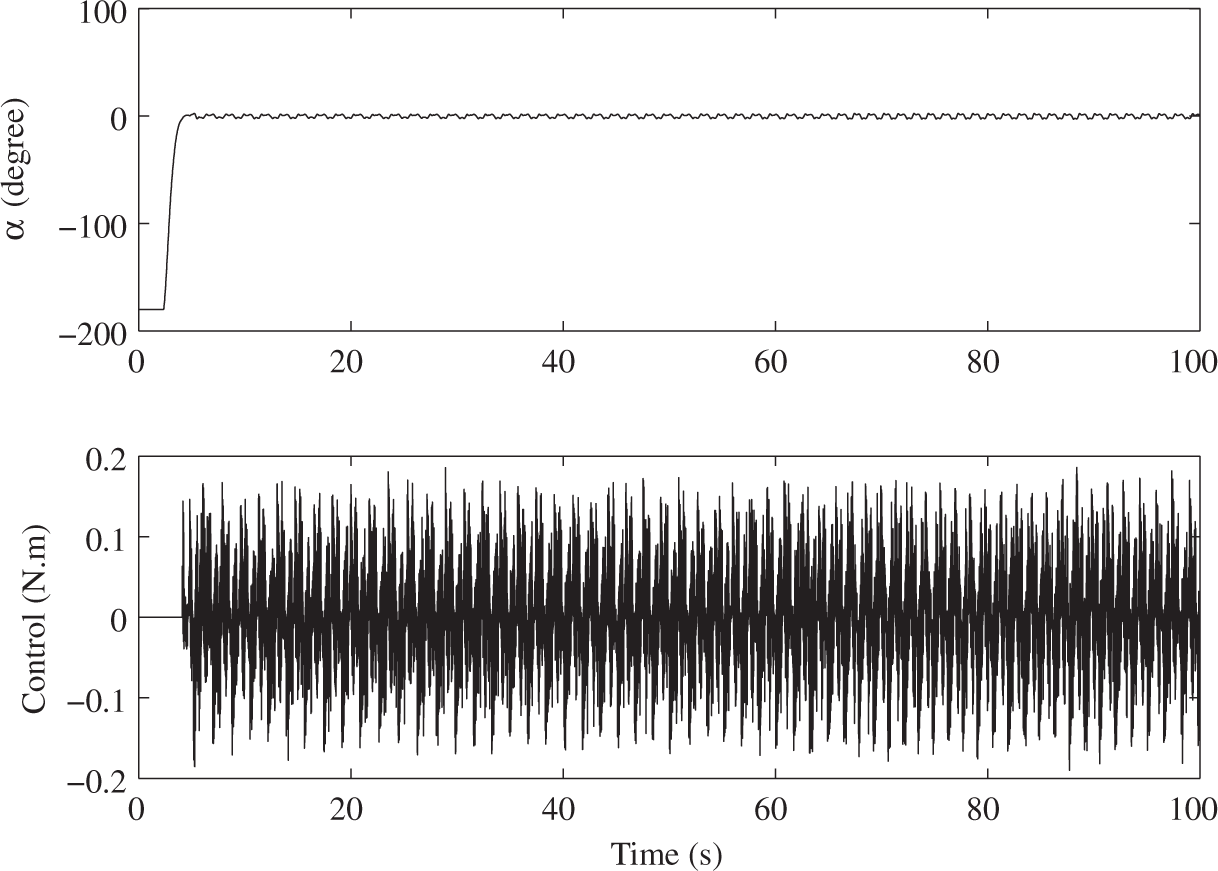
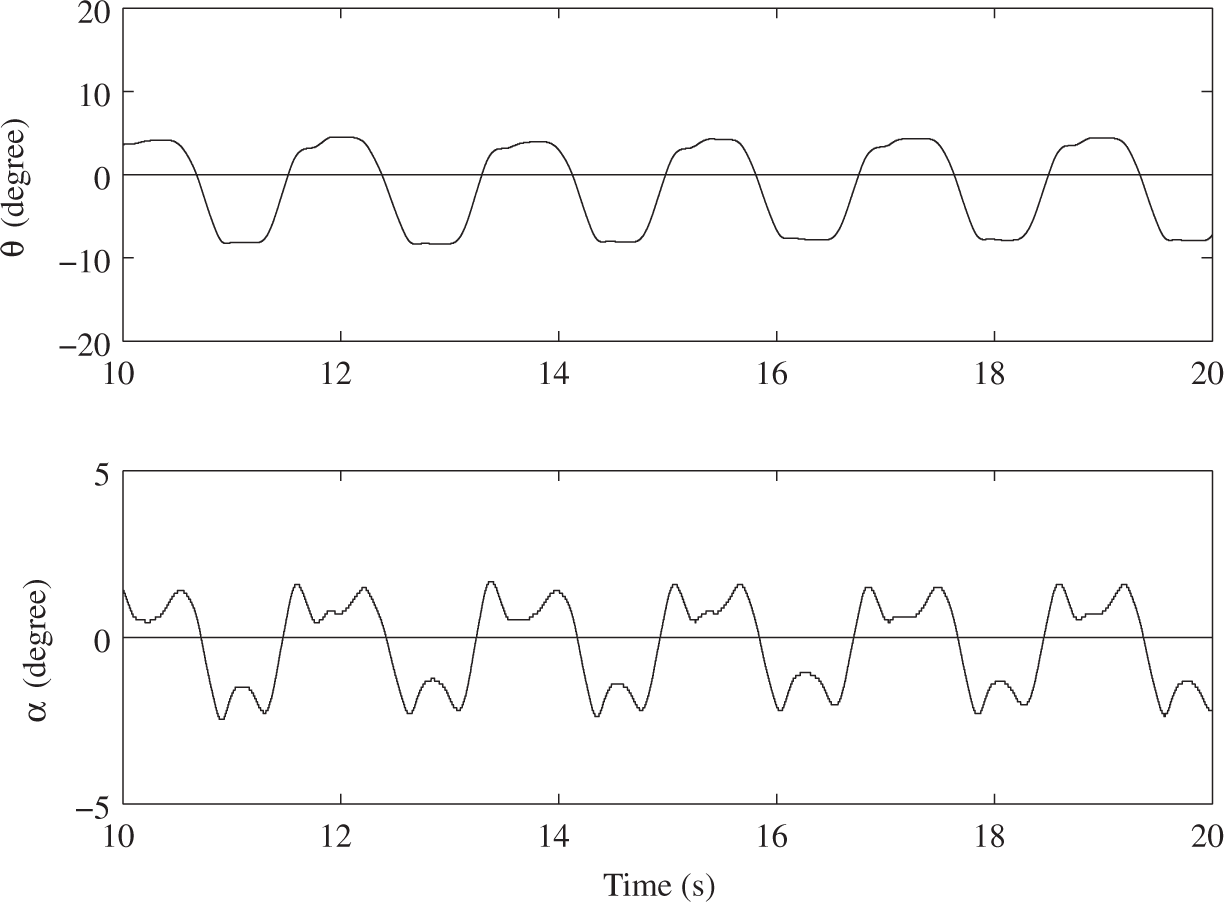
Now, we consider high-order control with N = 8. The control gain is given in equation (21). The simulation is shown in Figure 7. Compared to the results of low-order control by the semi-discretization method in Figure 4, high-order control performs much better. Figures 8 and 9 show the transient and steady-state experimental responses of the inverted pendulum under high-order control. The steady-state oscillations of the angle α have a peak-to-peak amplitude of 4.1309°, smaller than that of low-order control with the semi-discretization method.
Simulation of high-order control of the inverted pendulum. N = 8. The top figure shows the response of the system from the initial condition α0 = 5.7296 and θ0 = 0. Solid line: the angle α. Dash line: the angle position θ of the rotary arm. The bottom figure shows the control. Experimental transient response of the inverted pendulum under the high-order control method. N = 8. The top figure shows the response of the angle α. The bottom figure shows the control signal.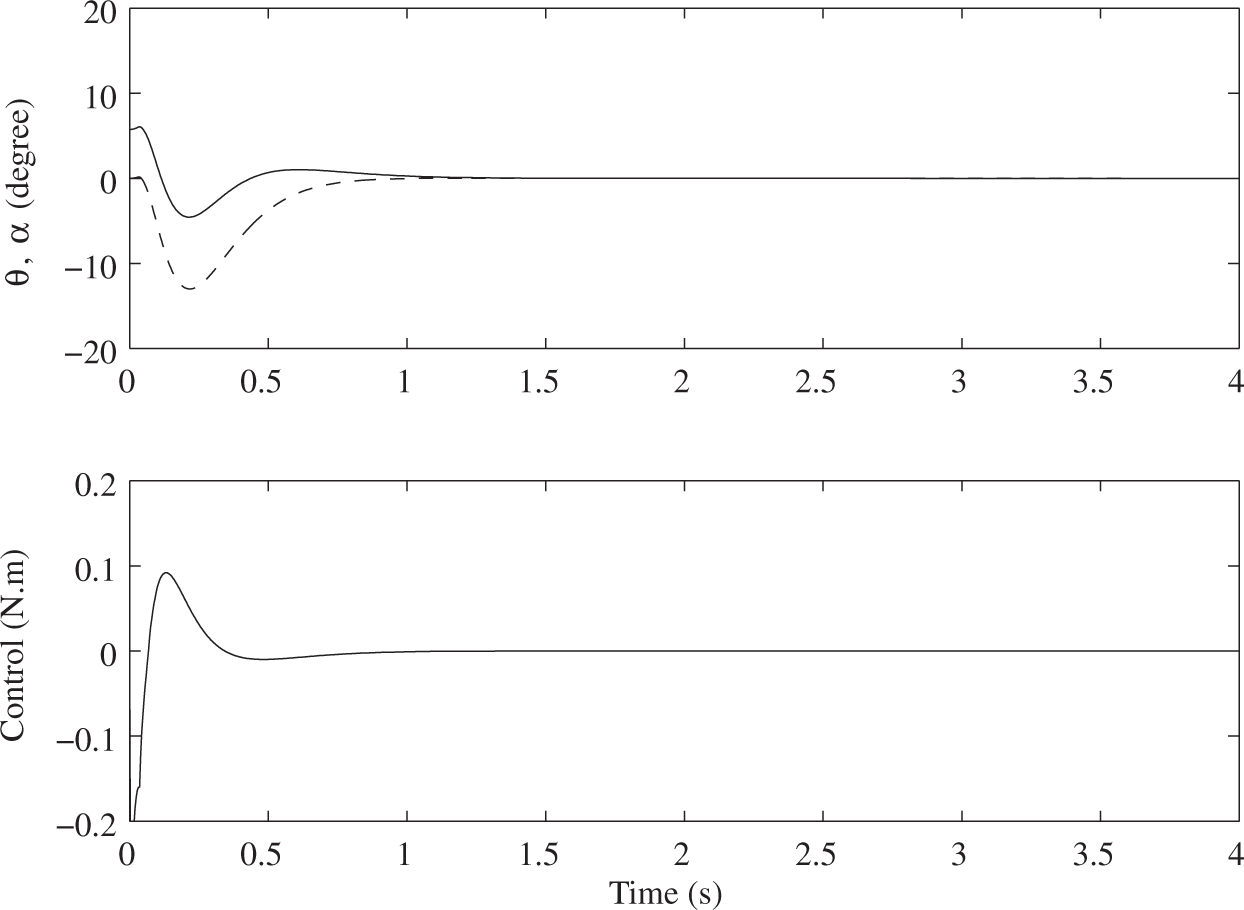
4.2.1. A study of high-order control
In the method of continuous time approximation and semi-discretization, the discretization level N determines how accurate the finite dimensional representation of the time-delayed dynamic system is (Sun, 2008, 2009; Song and Sun, 2011). In the design of high-order control, however, this is no longer the case. This design method leads to a filter of order N to determine the control, as illustrated by the second line in equation (17). This filter is not an approximation of any given system dynamics, but rather a consequence of the full extended state feedback in equation (17). Therefore, we conjecture that the closed-loop dynamics of the control system may be independent of N. In the following, we present simulation and experimental evidence to support this conjecture.
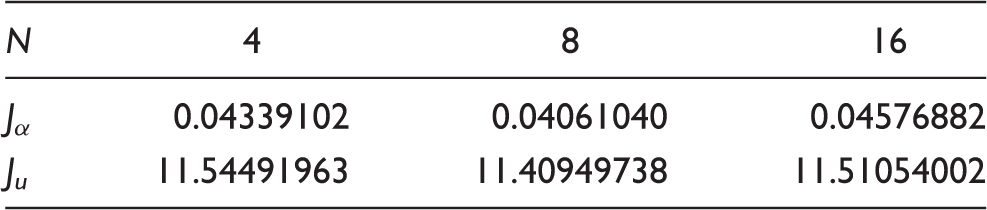
We have selected three values N = 4, 8 and 16 to compare the system responses under high-order control. Numerical simulations of the three cases are shown in Figure 10. The response and control are nearly identical. We have also computed the control performance indices J, listed in Table 1.
Effect of the discretization level N on the performance of high-order control. The response of the inverted pendulum is simulated. The top figure shows the response α of the system from the initial condition α0 = 5.7296 and θ0 = 0 and with N = 4, 8, 16. The bottom figure shows the control. Solid line: N = 4. Dash line: N = 8. Dash–dot line: N = 16. All three lines overlap each other. The performance indices of three high-order controls with N = 4, 8 and 16. The time integration is over [0, 16]. Note that J from the simulations is much smaller than that from experiments because it is computed over a short time from responses to very small initial conditions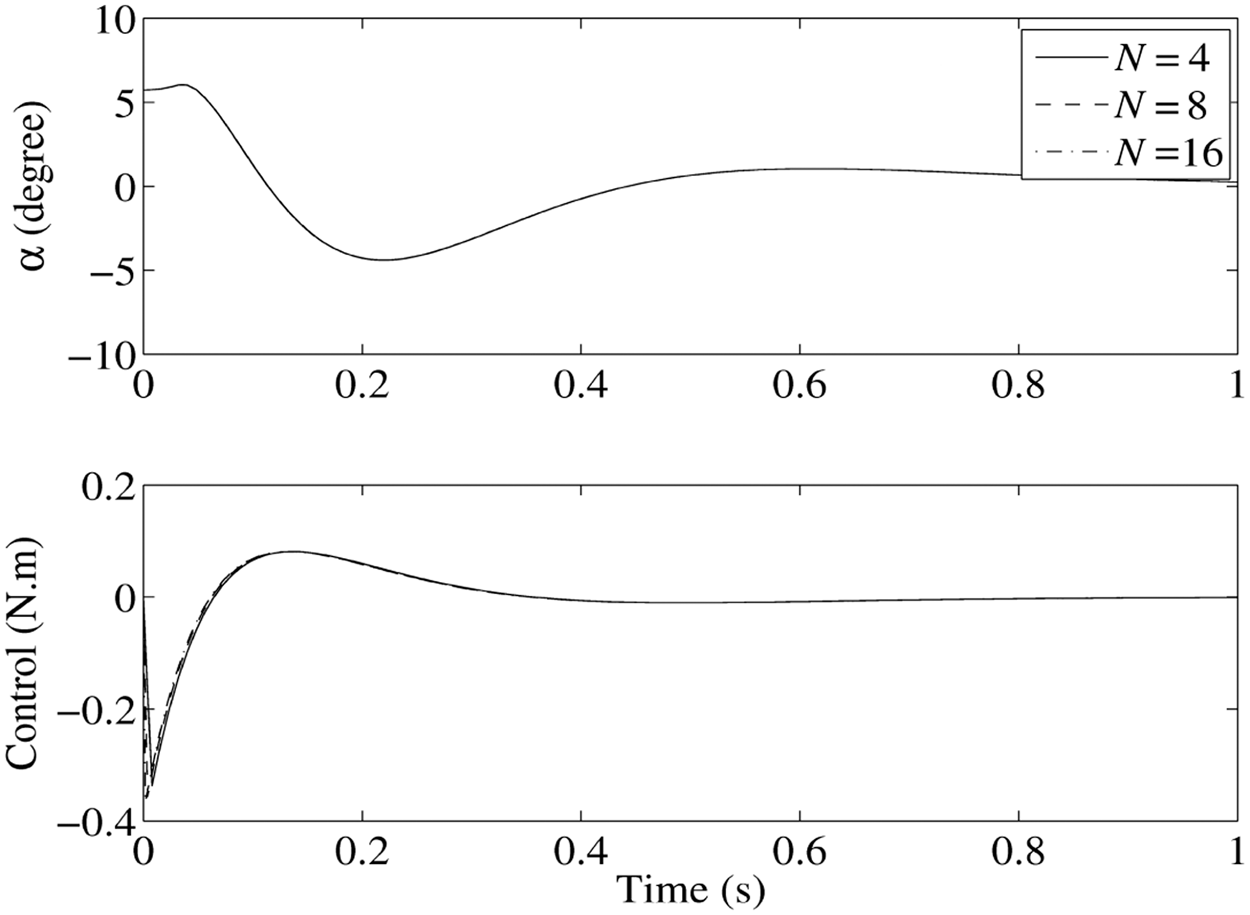

The performance indices of three high-order controls with N = 4, 8 and 16 in the steady state. The time integration of the experimental data is over [30, 40]

The performance indices Jα and J u of three high-order controls with N = 4, 8 and 16 in the steady state. The time integration of the experimental data is over [30, 40]
5. Concluding remarks
In this paper, we have investigated two control design methods: optimal feedback gain with the semi-discretization method and high-order control. Both simulations and experiments were carried out to demonstrate the utility of the control. The semi-discretization method offers optimal controls without increasing the dimensions of the gain vector. This makes the real-time implementation of the control more efficient. However, its performance is not as good as that offered by high-order control. High-order control involves an increased number of gains, and thus has more degrees of freedom to determine the control, which often leads to better performance than a low-order control method such as the one designed with the semi-discretization method. High-order control is determined by an Nth order filter, and becomes history dependent. We have also found that the performance of high-order control appears to be insensitive to the discretization level N.
Footnotes
Funding
This work was supported by the Natural Science Foundation of China (grant number 11172197) and by a key-project grant from the Natural Science Foundation of Tianjin.