
Abstract
An isolation system is not very effective when an inappropriate level of damping is used. This paper proposes a theoretical method which can be used to determine the optimal frictional coefficient of an isolation system. Only a one-dimensional isolation system and ground motion are considered. The frictional coefficient is optimized by minimizing the sum of squares of structural absolute accelerations, with the optimization results being validated graphically. Sensitivity studies were used to verify the feasibility of the optimal frictional coefficient, coupled with a practical example in Taipei under the conditions of the Hualien and El Centro earthquakes. Consequently, the feasibility and reliability of the proposed optimal design were verified.
1. Introduction
Seismic isolation can mitigate structural responses under earthquake. The isolation procedure here involves the installation of an isolator which can elongate the fundamental period between the superstructure and the ground. Many isolation system types have been implemented for the purposes of structural and equipment isolation within the civil and mechanical engineering disciplines. An isolation system with a low frequency can reduce the acceleration transmitted to the superstructure (Chung et al., 2009a; Yang et al., 2011). However, a well-designed isolation system should include damping for energy dissipation. The effectiveness of an isolation system is reduced when the incorporated damping is either too large or too small. Thus, an appropriate level of damping may result in better performance with regard to both the acceleration of superstructure and the base displacement. Therefore, this study proposes a theory for the determination of an optimum frictional damping for an isolation system with a linear restoring force.
In passive structural control, the optimal design of a tuned mass damper (TMD) has been well developed (Chung et al., 2011). However, an optimal design for a structural isolation system is still under development. Optimal design formulas of the linear viscous TMD for an undamped single degree-of-freedom (SDOF) structure have been proposed (Den Hartog, 1956; Warburton and Ayorinde, 1980; Warburton, 1982). If damping is present within the primary structure, it is difficult to obtain the closed-form solutions for the optimal parameters of a TMD (Fujino and Abe, 1993; Sadek et al., 1997; Bakre and Jangid, 2005; Wang et al., 2009). A nonlinear viscous damper may be cost effective in fabrication and maintenance. Hence, Chung et al. (2009b) proposed optimization procedures in the time domain for the design of a TMD with nonlinear viscous damping. Optimal design parameters for the nonlinear TMD were sought using an optimization method to minimize the structural responses. Inaudi and Kelly (1995) proposed a friction-dissipating TMD where the restoring force was provided by linear springs and the dissipating force was provided by friction dampers acting transversely to the direction of motion. Subjected to white-noise support excitation, the mean square structural responses, estimated by statistical linearization, were minimized to obtain the optimum parameters for the friction-dissipating TMD. The results were confirmed by comparing them with those obtained using Monte Carlo simulation.
The sliding type isolator with frictional energy dissipation has been well researched. Most of the research found that sliding supports can be quite effective in controlling the level of acceleration response of structures under earthquake excitation. Some of the research also found that for low coefficients of friction, the acceleration response does not vary with the frequency content of the ground motion. This implies that sliding supports can be effectively used for all kinds of sites, whether hard or soft soil, and whether close or far from causative faults (Mostaghel and Tanbakuchi, 1983; Mostaghel et al., 1983; Zayas et al., 1990; Mokha et al., 1991). Derby and Calcaterra (1970) proposed an optimal design formula for an undamped SDOF structure with a massless isolation system. In this system, the restoring force was provided by linear springs and the dissipating force was provided by elastic-viscous dampers. Subjected to white-noise ground excitation by minimizing the root mean square of the structural absolute acceleration, the optimal damping ratio of the isolation system can then be found. Inaudi and Kelly (1992) presented a procedure for defining optimal damping for a linear isolation system. For the statistical approach used, the ground motion was modeled as a stationary Gaussian random process and optimal damping was defined as that which renders the minimum peak floor acceleration. Within the deterministic approach presented, the maximum floor acceleration of the base isolated structure subjected to recorded ground motions was evaluated. This was performed as a function of the isolation energy dissipation capacity using numerical simulation methods. It was shown that optimal isolation damping increases with an increase in the damping of the superstructure. Thakkar and Jain (2004) studied the role of isolation damping for base-isolated buildings of moderate height by controlling their seismic response under different earthquake motion types. Two reinforced concrete frame buildings and eight real earthquake motions were considered. It was observed that the optimal value of isolation damping is dependent upon the characteristics of the input ground motion and has a low value for ground motions with only high frequencies. Jangid (2007) investigated the seismic response of multi-story buildings isolated using leader-rubber bearing (LRB) under near-fault motions. It was found that an optimum value of yield strength of the LRB exists for which the absolute acceleration of the building’s top floor attains the minimum value. The optimum value of yield strength of the LRB was found to be in the range of 10%–15% of the total weight of the building under near-fault motions. Furthermore, the energy-dissipating mechanism can be replaced with friction dampers. Jangid (1996, 2000, 2005) first considered the resilient-friction base isolator (R-FBI) as an isolation system and investigated optimal isolation damping to minimize the top floor root-mean-square acceleration when subjected to earthquake ground excitation. It was shown that the optimal isolation damping decreases with an increasing frictional coefficient of the R-FBI system, the number of floors in the superstructure, and the period of the superstructure. Further, the optimal friction coefficient of a sliding system with a restoring force to minimize the root mean square of the top-floor acceleration response of a base-isolated structure under earthquake ground motion was investigated. It was also shown that the optimal friction coefficient decreases with the increase of the period and damping ratio of base isolation system, and depends upon the intensity of earthquake excitation. Therefore, the optimal friction coefficient increases with the increase of the intensity of earthquakes. Furthermore, the analytical seismic response of multi-story buildings isolated by a friction pendulum system (FPS) was investigated under near-fault motions. It was also found that an optimal frictional coefficient of FPS exists for minimizing both the absolute acceleration of the building’s top floor and the sliding displacement. The optimal frictional coefficient of the FPS was found to be in the range of 0.05 to 0.15 under near-fault motions. It was also found to decrease with increasing flexibility of the FPS.
In a passive isolation system, it is always a problem that the system is not adaptive when it is excited by a non-design earthquake including different waveform or intensity. Thus, the optimal friction coefficient from the proposed design procedure may be suitable under an earthquake similar to the design one. However, passive isolation systems (e.g., FPS, LRB) are generally implemented in practical application (Naeim and Kelly, 1999) because their reliability has been verified and they are easy to design.
This paper investigates the optimal design of the frictional coefficient of an isolation system. The dynamic equation of a structure implemented on a frictional isolation system is expressed in discrete-time state space. A single equation was developed to determine the frictional force in both stick and slip states (Lu et al., 2006) so that time-history analysis can be conducted iteratively. The design parameter is optimized such that the sum of squares of the chosen structural response is minimized. If the friction coefficient becomes lower and lower, the structural acceleration and isolation displacement are larger and larger. On the other hand, if the frictional coefficient becomes higher and higher, the structural acceleration is higher and higher but the isolation displacement is still smaller and smaller. Therefore, there exists an optimal frictional coefficient to minimize the structural acceleration but not the isolation displacement. Hence, only structural acceleration is considered in the performance index in this study. As a result of the equations derived from the optimization procedure being nonlinear, the steepest descent method was adopted to solve the necessary, and sufficient, conditions of optimization. The design parameters were updated with the optimal step using the golden section search method. The feasibility of the optimization method is illustrated numerically using an isolated structure attached to a frictional isolation system subjected to Hualien and El Centro ground accelerations. The accuracy of the optimization result was also confirmed graphically. Furthermore, a sensitivity analysis was performed to study the influence of the system parameters. Finally, the isolated structure subjected to the Hualien and El Centro ground accelerations was taken as an example to verify the effectiveness of the frictional isolation system with an optimal frictional coefficient.
2. Dynamics of frictional isolation system
A superstructure was modeled as an SDOF structure and was mounted on a frictional isolation base, transforming it into a two-degree-of-freedom (2DOF) system. By utilizing state space, the discrete-time first order difference equation is transformed from the equation of motion. In computing the frictional force, a simplified equation which includes two kinds of behavior of motion (stick and slip states) is proposed. Through each iteration of the discrete-time state equation, all the time-histories of structural responses can then be obtained.
2.1. Equation of motion of structure with frictional isolation system
A superstructure is modeled as an SDOF structure with mass Schematic diagram of structural isolation with frictional damping.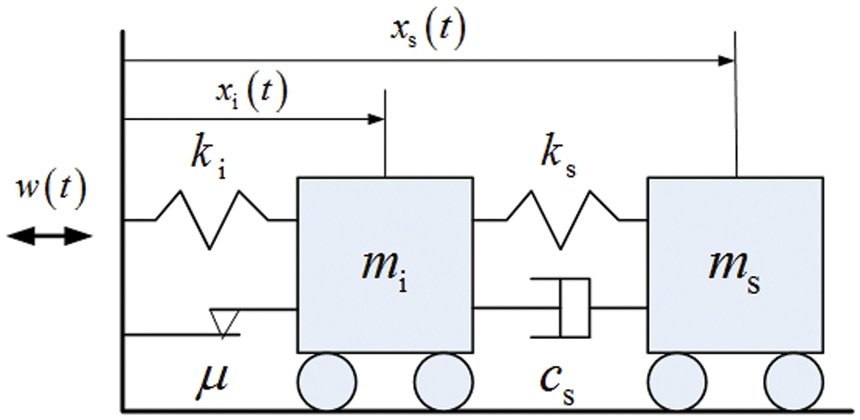




The equation of motion (equation (1)) in configuration space is conveniently expressed as a first-order differential equation in state space,




In the interval between two consecutive time steps,

2.2. Frictional force of structural isolation system
Under disturbance, sliding of the isolation interface has two states: the slip state and the stick state. In the slip state, the velocity of the isolation base relative to the ground is unknown but the magnitude of the frictional force is known to be
After equation (6) is substituted into equation (5), the frictional force at the kth step
When the magnitude of the estimated frictional force is less than the maximum frictional force

After the frictional force

3. Optimization of frictional coefficient
In order to achieve the maximum vibration isolation of the structure, the design of the frictional isolation system must be optimized. The optimal design parameter for the frictional isolation system can be obtained such that a performance index is minimized. The most appropriate performance index J is the sum of squares of the structural absolute accelerations

In order to solve the optimization problem, the state vector
According to calculus of variations, the first variation of the augmented performance index



Further, the third condition is

In this paper, the steepest gradient method of optimization is adopted. The initial guess for the frictional coefficient μ is assigned as Flowchart of iterative procedure.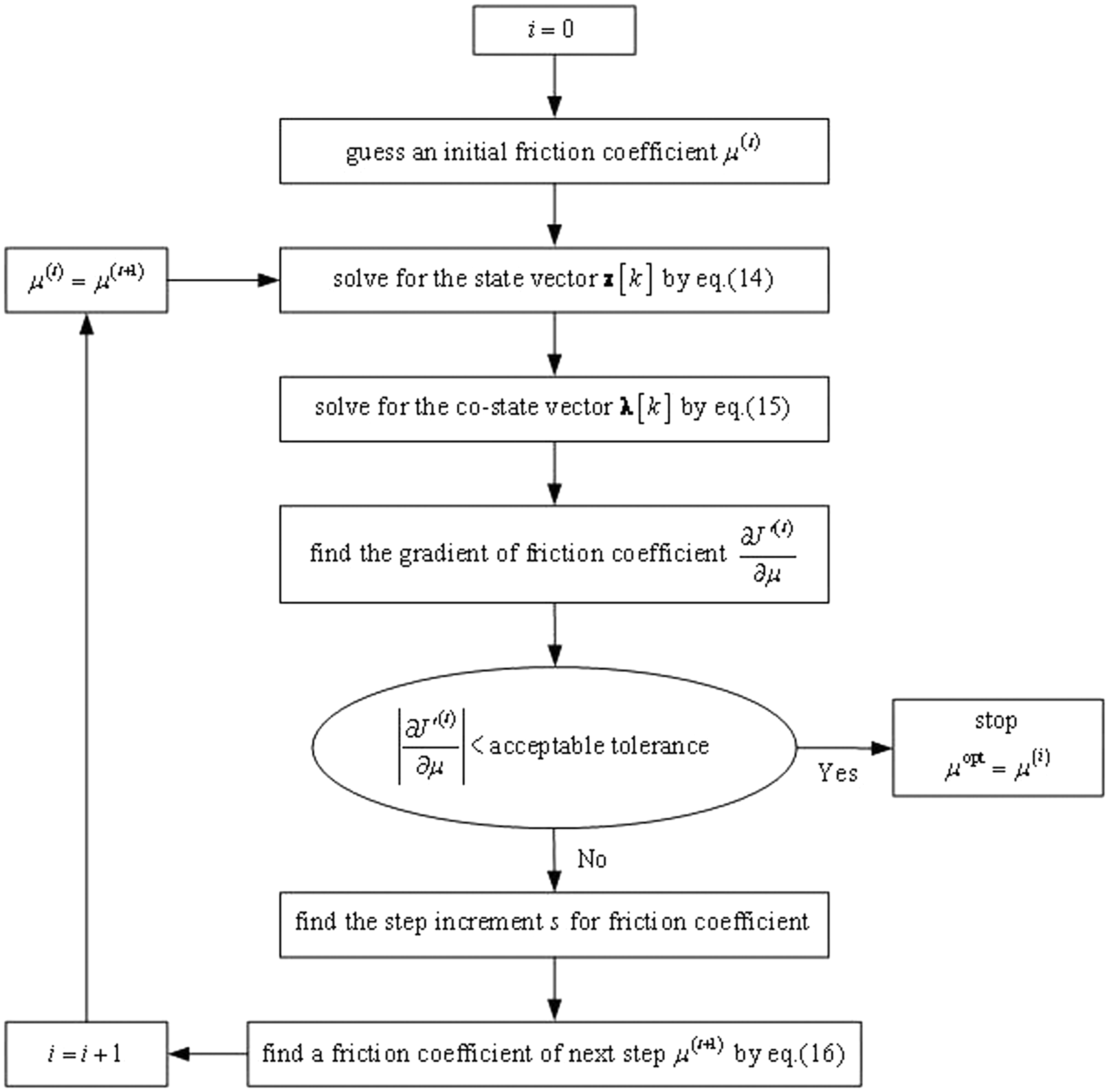
4. Numerical verification and sensitivity analysis
The feasibility of the optimization method was verified numerically using an isolated structure mounted on a frictional isolation system subjected to the 2002 Hualien, Taiwan, and 1940 El Centro, USA, earthquakes. Two-dimensional graphs of the objective function and the searching parameter were used to validate the optimization results. Following the optimization procedure, the performances of the superstructure with and without the frictional isolation system under the two specific earthquakes were compared. In addition, the influence of the optimal design parameters of the frictional isolation system was also investigated using sensitivity analysis.
4.1. Introduction of structural isolation system
In this research, a reinforced concrete building with an isolation system assumed to be located at the National Taiwan University (NTU), Taipei, Taiwan was considered and simplified as a SDOF model. When the superstructure is constructed on a frictional isolation system, it becomes a 2DOF system. As a simplified SDOF superstructure for the first mode, the mass
4.2. Optimal frictional coefficient
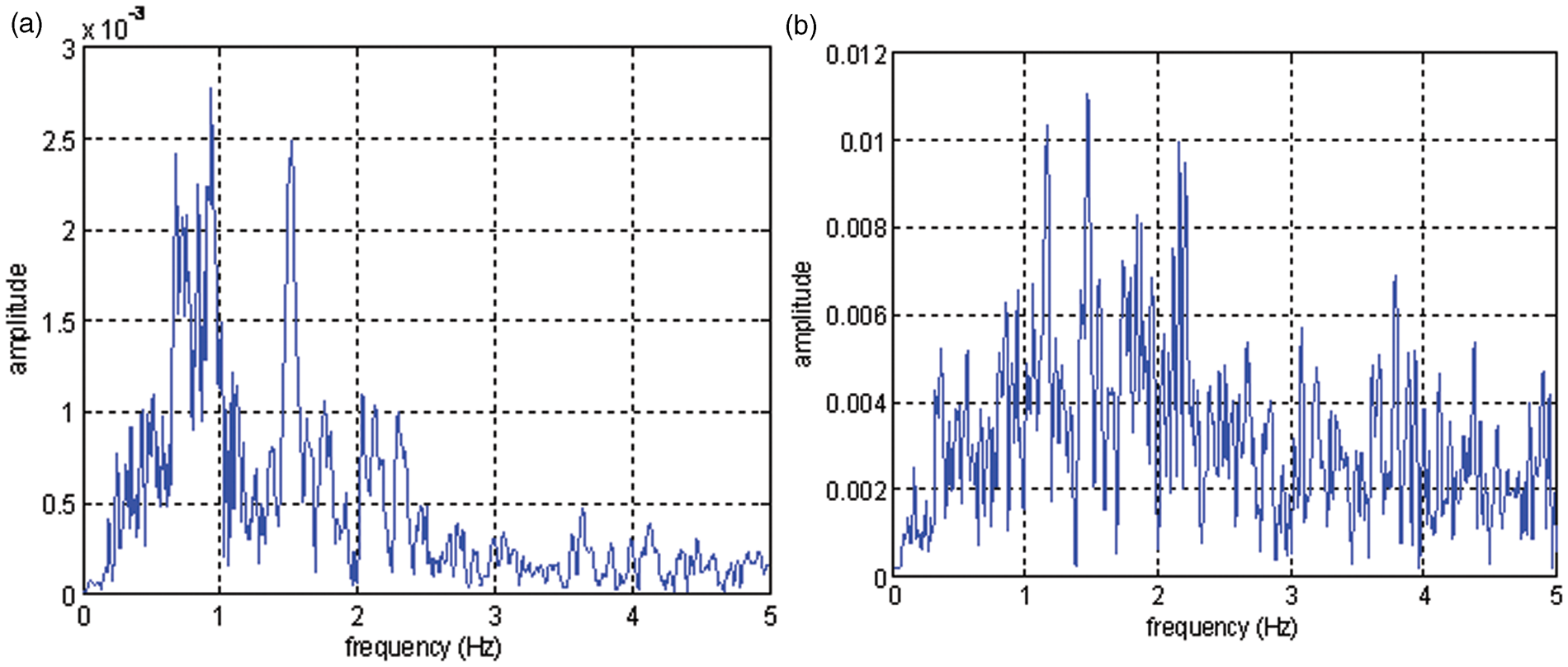
In this paper, the ground accelerations of two design earthquakes, Hualien and El Centro, were both scaled to a peak ground acceleration (PGA) equal to 3.14 m/s2, which corresponds to the maximum considered earthquake with a return period of 2500 years in Taipei. The ground accelerations of the Hualien earthquake were taken at the NTU campus. The root mean square of the ground accelerations for the Hualien and El Centro earthquakes were 0.356 m/s2 and 0.423 m/s2, respectively (Figure 3). From the frequency analysis, the dominant frequency of the Hualien earthquake was in the range of 0.68 to 1.52 Hz. Similarly, the dominant frequency of the El Centro earthquake was in the range of 1.16 to 2.21 Hz (Figure 4). As a result, the Hualien earthquake may cause larger responses for the isolation system due to its low-frequency content which is influenced by the soft soil in the Taipei basin. The optimal design frictional coefficients μ which minimizes the performance index J for the frictional isolation system were computed by substituting Ground accelerations. (a) 2002 Hualien earthquake (PGA = 0.32 g). (b) 1940 El Centro earthquake (PGA = 0.32 g). Spectra of ground accelerations. (a) 2002 Hualien earthquake. (b) 1940 El Centro earthquake.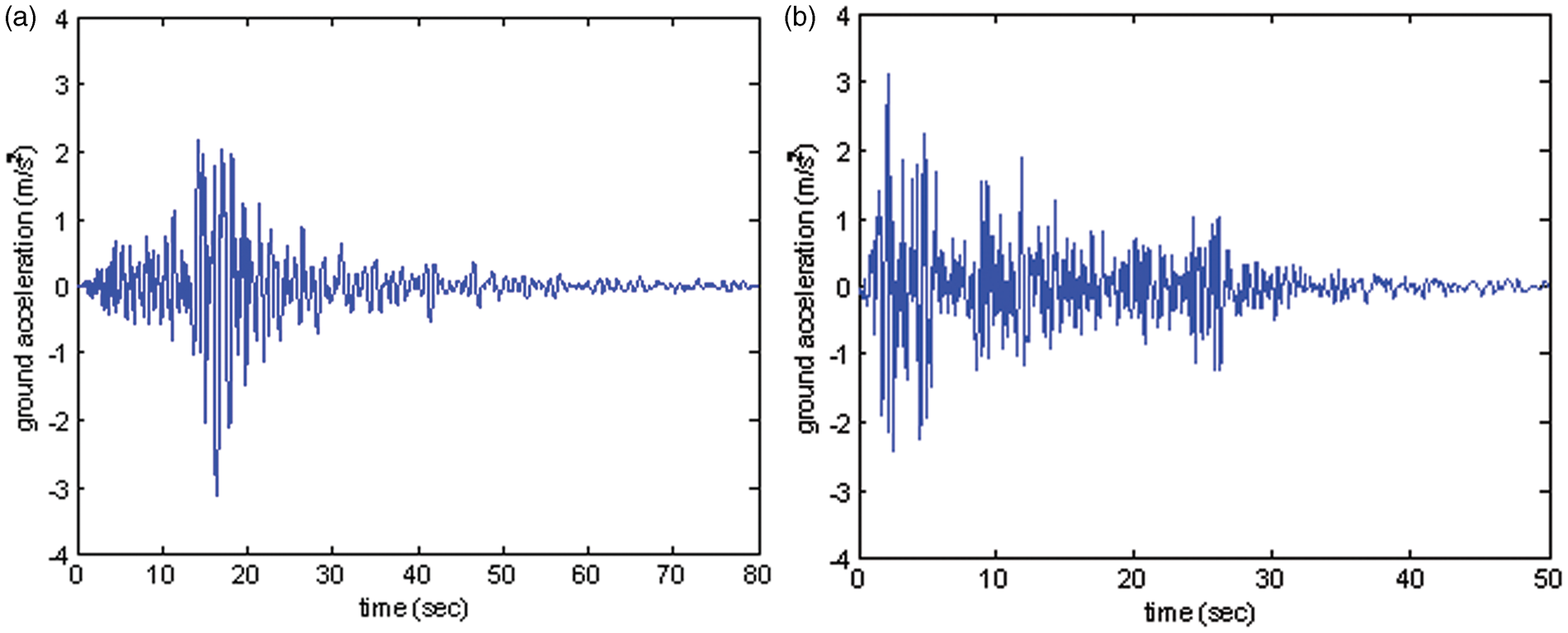
Furthermore, to confirm the reliability of the optimization procedures and to evaluate the effectiveness of the structural isolation system, an acceleration ratio RA, which is a normalization of the performance index J, was defined as:

Figure 5 shows the acceleration ratio RA versus the design parameter of the frictional isolation system. From this figure, the design parameter of the frictional isolation system with the lowest acceleration ratio RA has the same value as the optimal design parameter from the optimization procedure under each one of the two earthquakes investigated. Therefore, the proposed method for the optimal design parameter of the frictional isolation system is feasible.
Variation of acceleration ratios with frictional coefficient. (a) 2002 Hualien earthquake. (b) 1940 El Centro earthquake.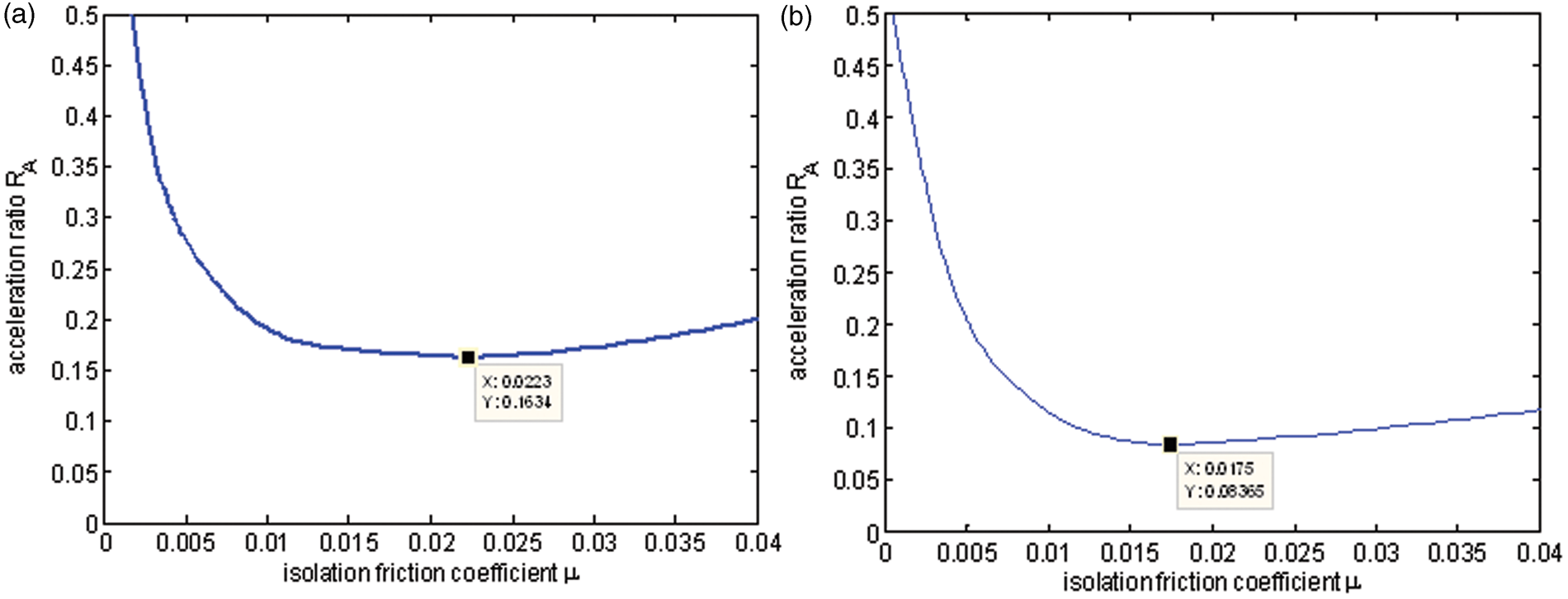
Moreover, the optimal friction coefficient of isolation systems is proportional to the PGA of an earthquake (Jangid 2000). In Jangid (2005), the optimal frictional coefficient ranged from 0.05 to 0.15 under near-fault earthquakes with intensities from 0.36 to 0.87 g. However, in Jangid (2000), the optimal frictional coefficients ranged from 0.01 to 0.03 under excitations with smaller intensities. In this study, the intensity of the far-field earthquakes is 0.32 g and the optimal friction coefficients are about 0.02 which fall into the range proposed by Jangid (2000).
4.3. Effectiveness of structural isolation system with optimal frictional coefficients
Considering the Hualien earthquake for the structure without an isolation system, the peak structural absolute acceleration, root-mean-square structural absolute acceleration, peak structural displacement, and root-mean-square structural displacement were 9.488 m/s2, 1.435 m/s2, 0.1851 m, and 0.0279 m, respectively (Table 1). For the isolated structure with an optimal frictional coefficient equal to 0.0223, the peak structural absolute acceleration, root-mean-square structural absolute acceleration, peak structural relative displacement Time histories of structural absolute accelerations. (a) 2002 Hualien earthquake. (b) 1940 El Centro earthquake. Time histories of base displacements. (a) 2002 Hualien earthquake. (b) 1940 El Centro earthquake. Effectiveness of optimal structural isolation system.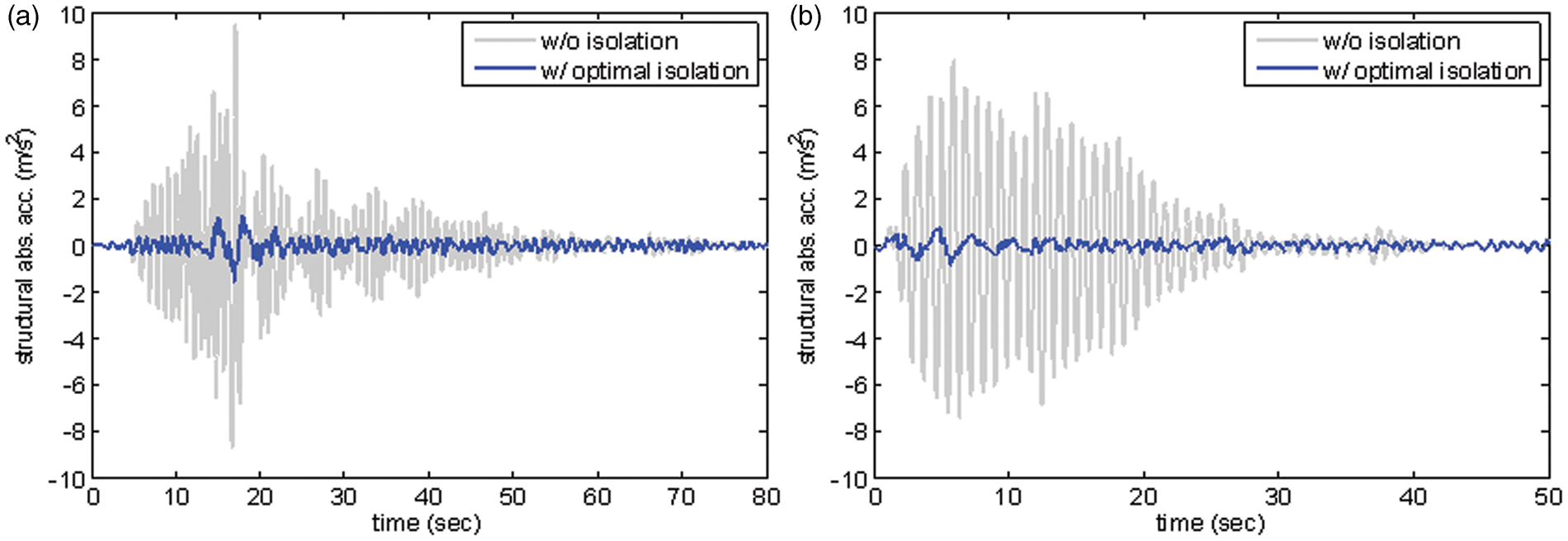
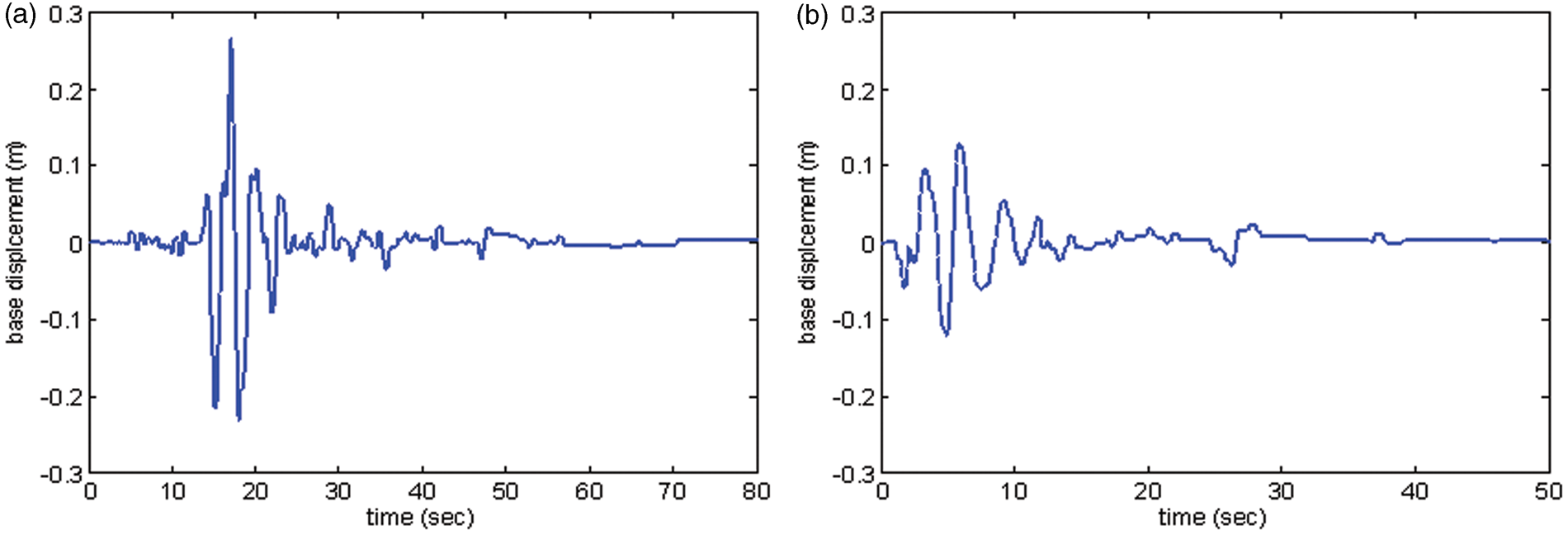
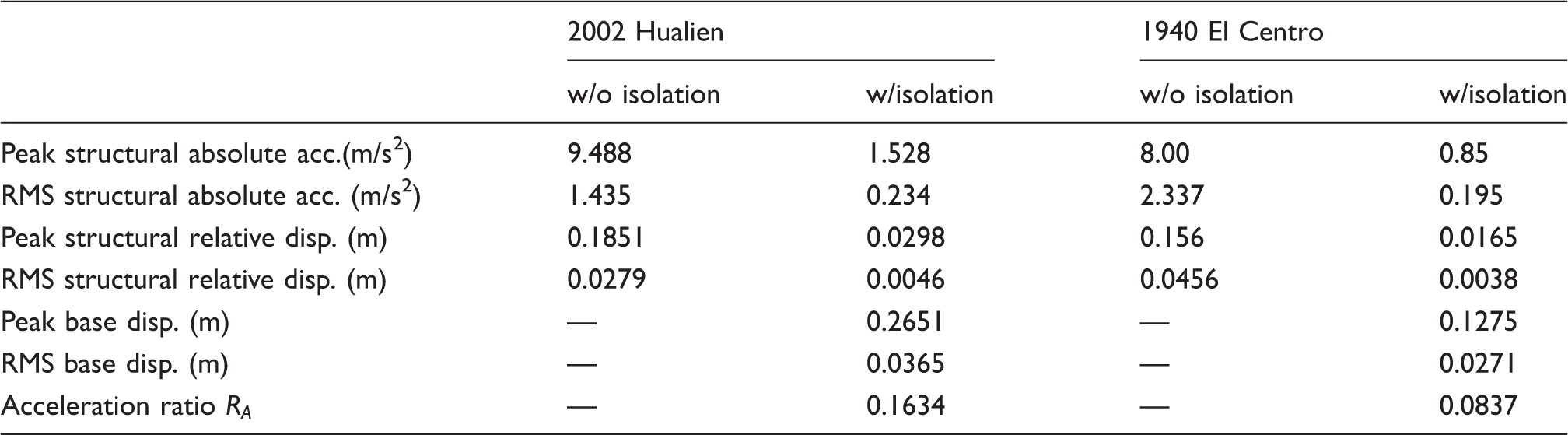
Considering the El Centro earthquake for the structure without an isolation system, the peak structural absolute acceleration, root-mean-square structural absolute acceleration, peak structural displacement, and root-mean-square structural displacement were 8.00 m/sec2, 2.337 m/sec2, 0.156 m, and 0.0456 m, respectively (Table 1). Post isolation with the optimal frictional coefficient equal to 0.0175, the peak structural absolute acceleration, root-mean-square structural absolute acceleration, peak structural relative displacement
4.4. Sensitivity analyses
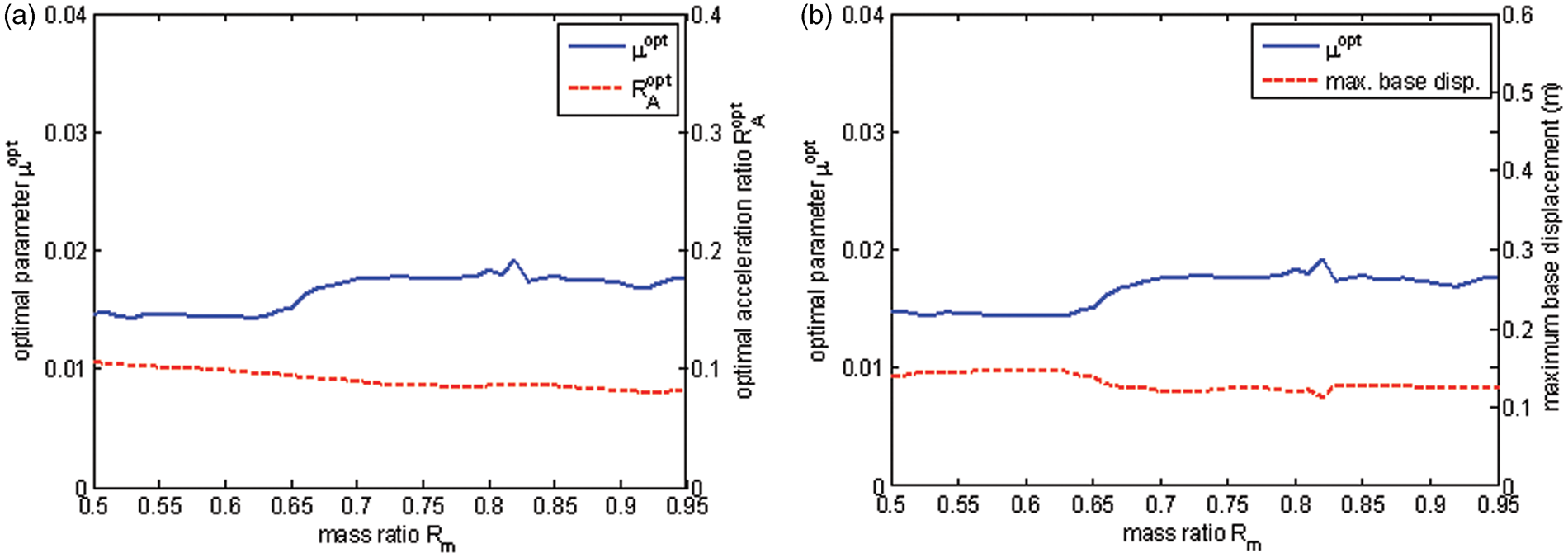
This section presents sensitivity analyses to evaluate the influence of system parameters on the optimal frictional coefficient. Four parameters, the mass ratio, the structural damping ratio, the frequency ratio, and the isolation frequency, were analyzed. Firstly, for the Hualien earthquake, in the case when the mass ratio varies from 0.5 to 0.95 and the other parameters are fixed (i.e. Sensitivity of the mass ratio under 2002 Hualien earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement. Sensitivity of mass ratio under 1940 El Centro earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement.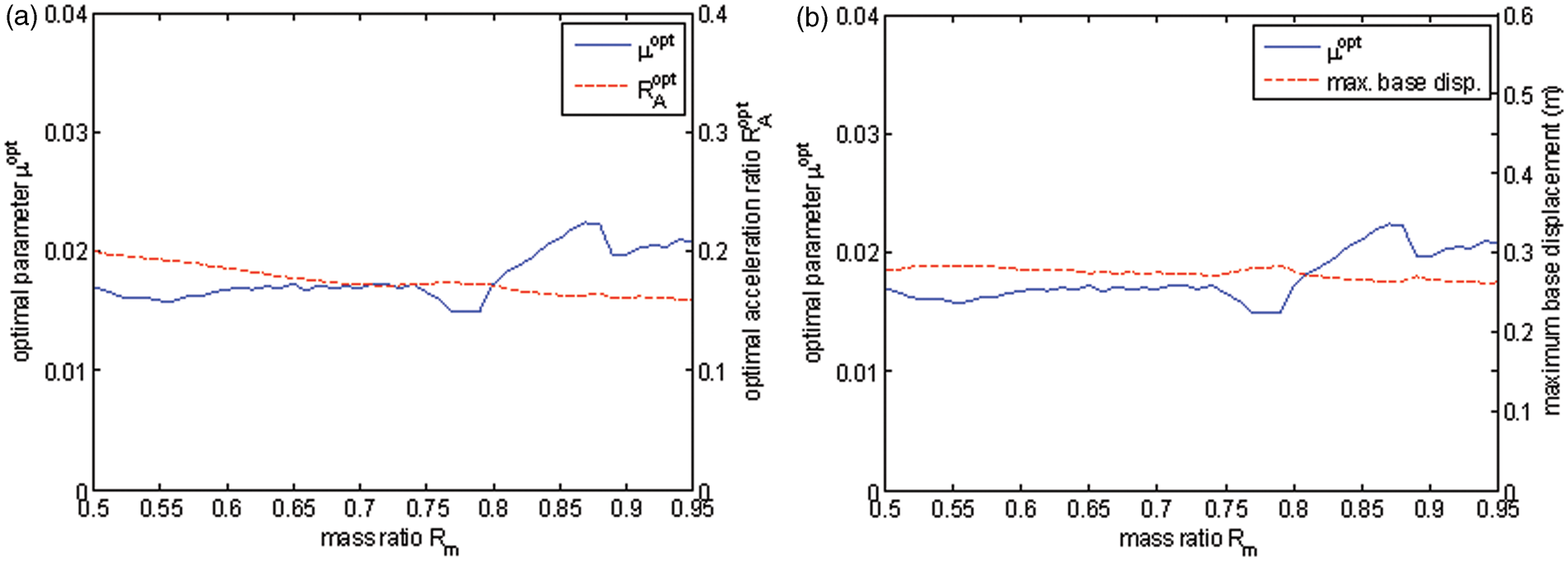
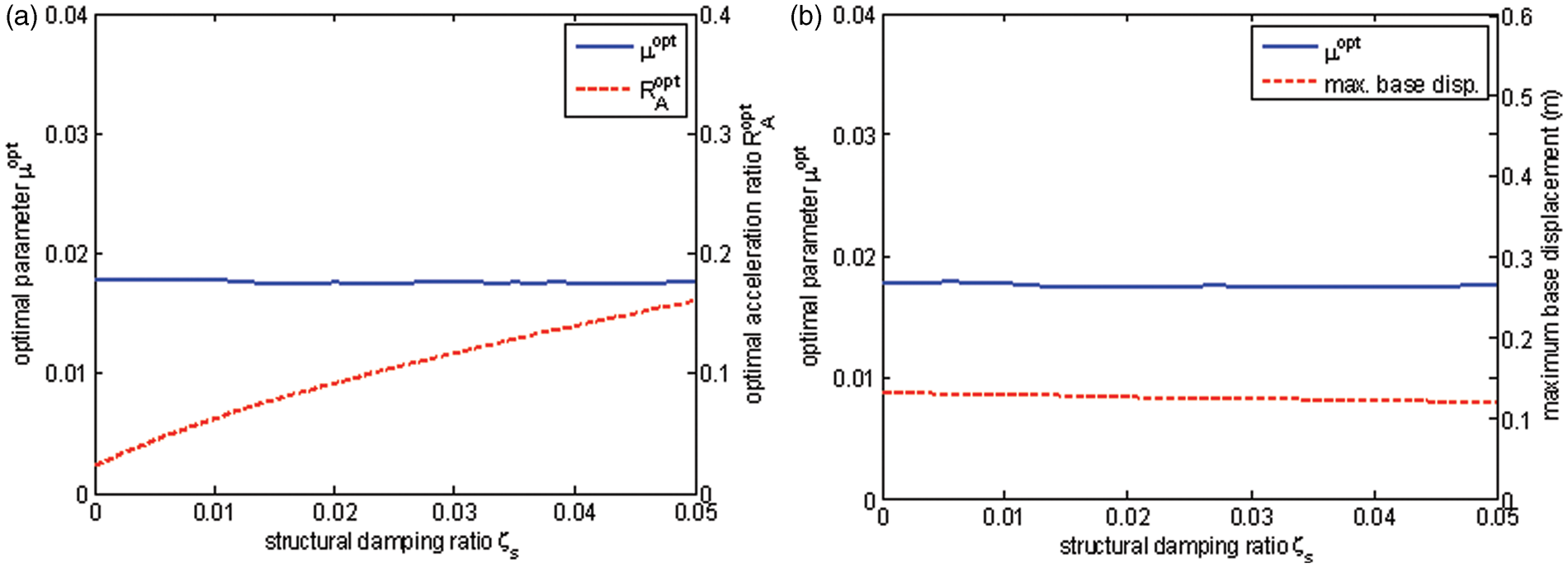
Following the investigation into the sensitivity of the mass ratio, the influence of the structural damping ratio Sensitivity of structural damping ratio under 2002 Hualien earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement. Sensitivity of structural damping ratio under 1940 El Centro earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement.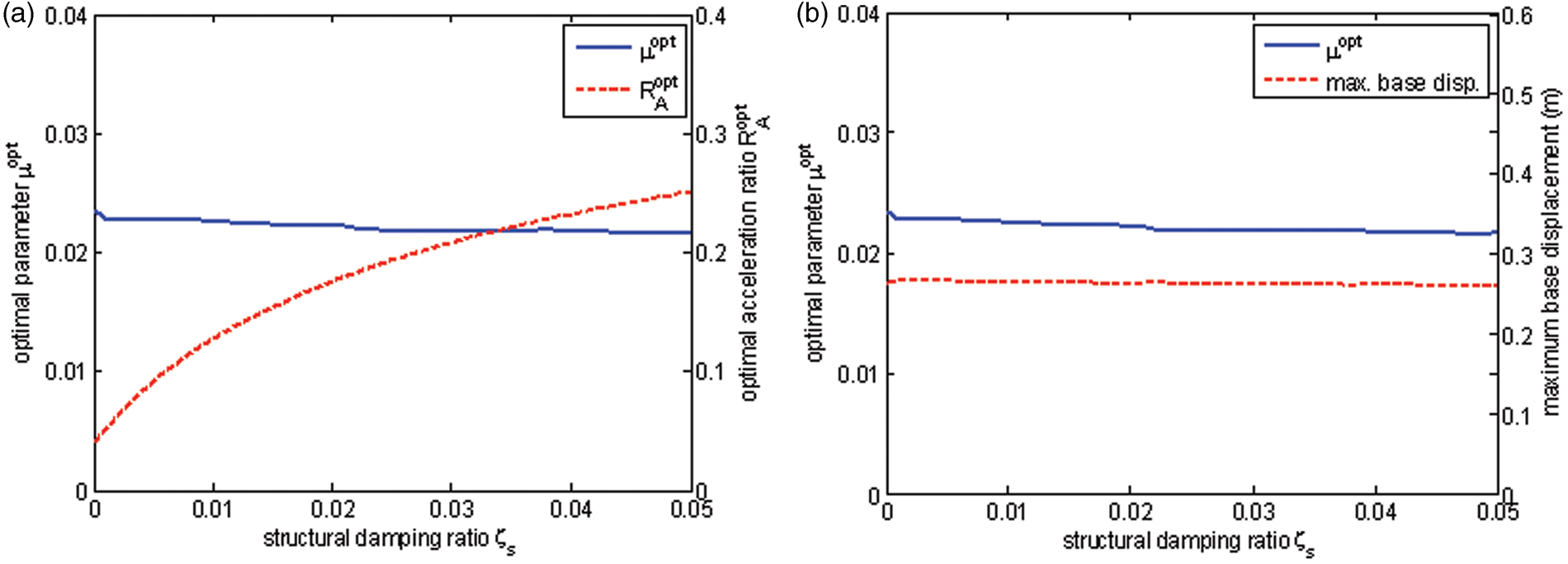
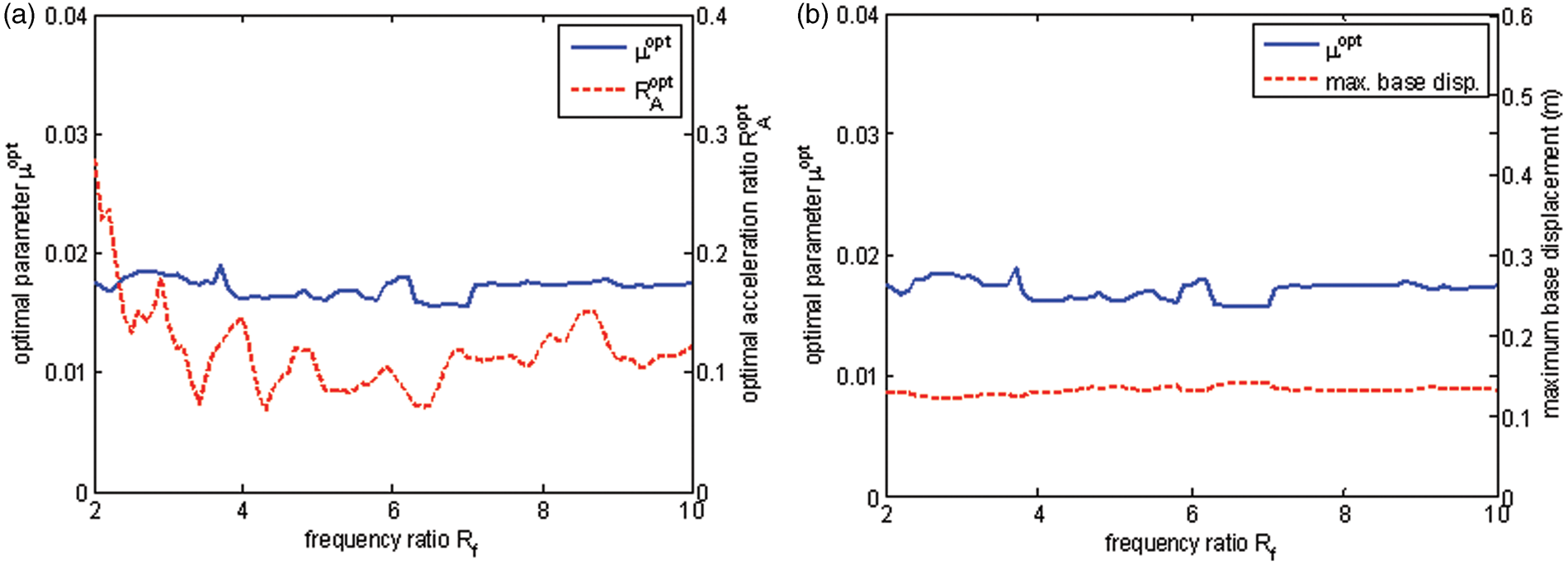
The sensitivity of a variation in the frequency ratio Sensitivity of frequency ratio under 2002 Hualien earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement. Sensitivity of frequency ratio under 1940 El Centro earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement.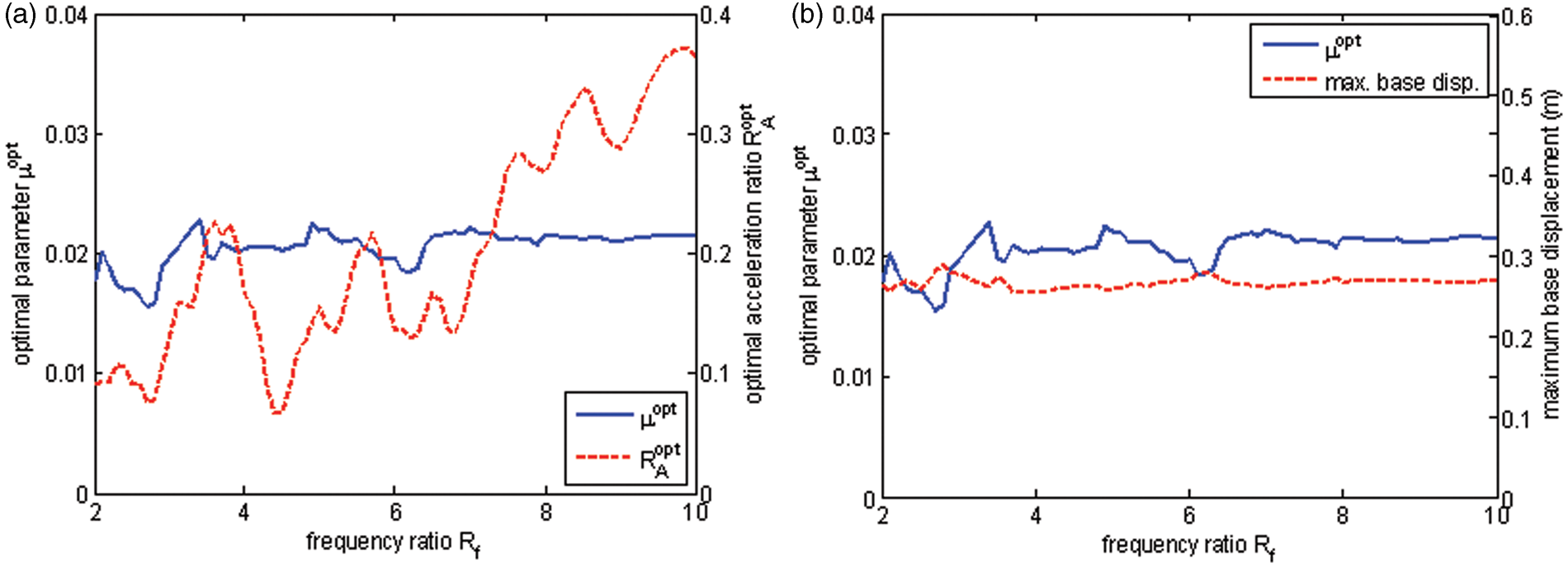
Finally, the influence of the isolation frequency Sensitivity of isolation frequency under 2002 Hualien earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement. Sensitivity of isolation frequency under 1940 El Centro earthquake. (a) Optimal acceleration ratio. (b) Maxiumum base displacement.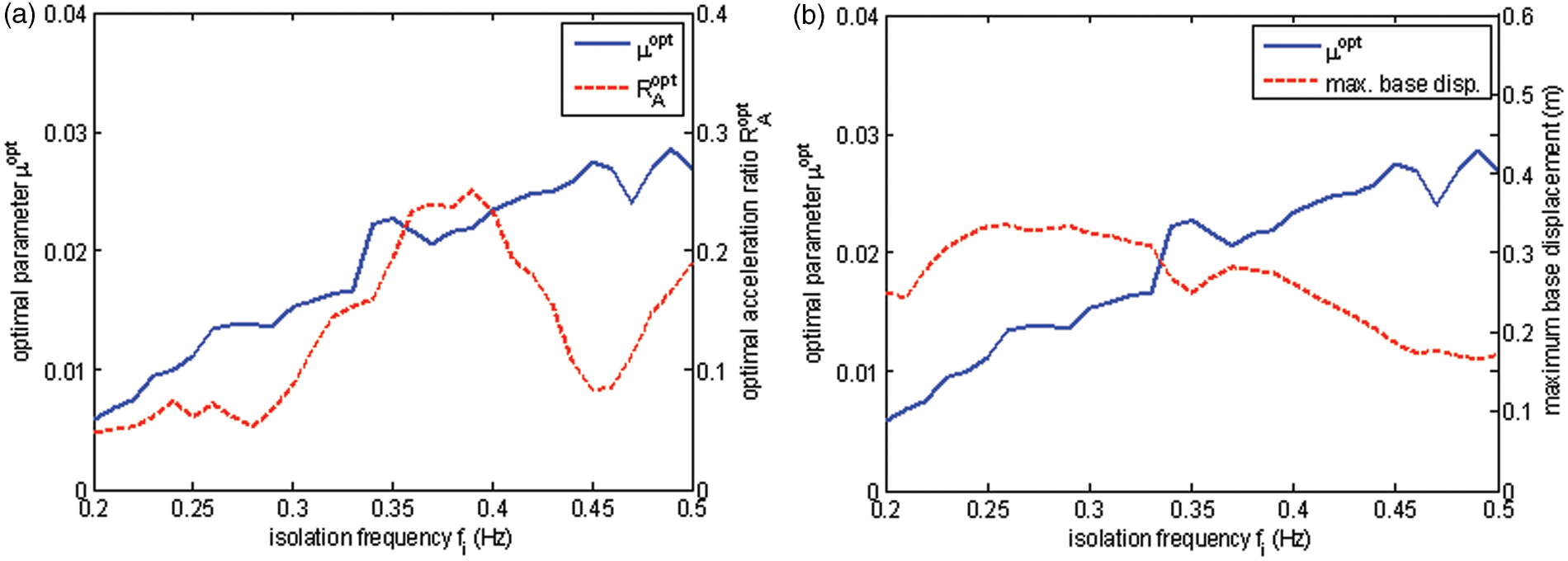

5. Conclusions
An optimization method for the optimal design of a frictional isolation system is proposed in this paper. Only one-dimensional isolation system and ground motion are considered. The frictional coefficient was optimized by minimizing the sum of squares of the structural absolute accelerations. Since the conditions of the optimization are highly nonlinear, a numerical method was proposed to systematically solve for the optimal frictional coefficient, thereby guaranteeing the convergence of the solution. Based on the presented simulation results, several conclusions are summarized as follows:
The feasibility of the proposed optimization method was verified by the implementation of the frictional isolation system for a structure assumed to be located at the National Taiwan University under the influence of two specific design earthquakes (the Hualien and El Centro earthquakes). The isolation system with the optimal frictional coefficient, which was obtained using the proposed optimization method, performed well under the two earthquakes in terms of both the isolation displacement and the structural acceleration. The proposed optimization method is easily implemented by substituting the three system parameters, the mass ratio, the frequency ratio, and the structural damping ratio, with one design earthquake. The accuracy of the proposed optimization method was also proven diagrammatically. The sensitivity analysis shows that the optimal frictional coefficient is sensitive to the isolation frequency but not the mass ratio, the frequency ratio, or the structural damping ratio. As a preliminary design, after the design parameter is suggested from the optimization method, if the isolation displacement of the system with optimal frictional coefficient exceeds the design one, the frictional coefficient may increase until the design isolation displacement is satisfied but the structural acceleration is no longer optimal.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.