A three-dimensional (3-D) method of analysis is presented for determining the free vibration frequencies of hemi-ellipsoidal shells of revolution with eccentricity having uniform thickness. Unlike conventional shell theories, which are mathematically two-dimensional, the present method is based upon the 3-D dynamic equations of elasticity. Displacement components , , and in the radial, circumferential, and axial directions, respectively, are taken to be periodic in and in time, and algebraic polynomials in the r and z directions. Potential (strain) and kinetic energies of the hemi-ellipsoidal shells of revolution with eccentricity are formulated, and the Ritz method is used to solve the eigenvalue problem, thus yielding upper bound values of the frequencies by minimizing the frequencies. As the degree of the polynomials is increased, frequencies converge to the exact values. Convergence to three or four-digit exactitude is demonstrated for the first five frequencies of the shells of revolution. Numerical results are presented for a variety of hemi-ellipsoidal shells of revolution with eccentricity.
Even so, conventional shell theory is only applicable to thin shells. A higher order shell theory could be used that considers the effects of shear deformation and rotary inertia, and would be useful for the low frequency modes of moderately thick shells. Such a theory would also be 2-D. But for ellipsoidal shells the resulting equations would be very complicated.
There is little published literature on the problem of ellipsoidal shells by a 3-D approach. Recently Shim and Kang (2004) analyzed solid hemi-ellipsoids and hemi-ellipsoidal shells of revolution with uniform thickness, and Kang and Leissa (2008) complete ellipsoidal shells of revolution with variable thickness and solid ellipsoids, based upon a 3-D theory. It is known that there is no published literature on the problem of hemi-ellipsoidal shells of revolution with eccentricity. According to the size of eccentricity in hemi-ellipsoidal shells of revolution, diverse shapes of hemi-ellipsoidal shells can be obtained. A hemi-spherical shell of revolution with eccentricity analyzed by Kang (2011) recently is a special case of the present hemi-ellipsoidal one.
In the present work hemi-ellipsoidal shells of revolution with eccentricity having uniform thickness are analyzed by a 3-D approach. Instead of attempting to solve equations of motion, an energy approach is followed which, as sufficient freedom is given to the three displacement components, yields frequency values as close to the exact ones as desired. To evaluate the energy integrations over the shell volume, displacements and strains are expressed in terms of circular cylindrical coordinates, instead of related 3-D shell coordinates which are normal and tangent to the shell midsurface. Results are obtained for 21 hemi-ellipsoidal shells of revolution with eccentricity.
2. Method of analysis
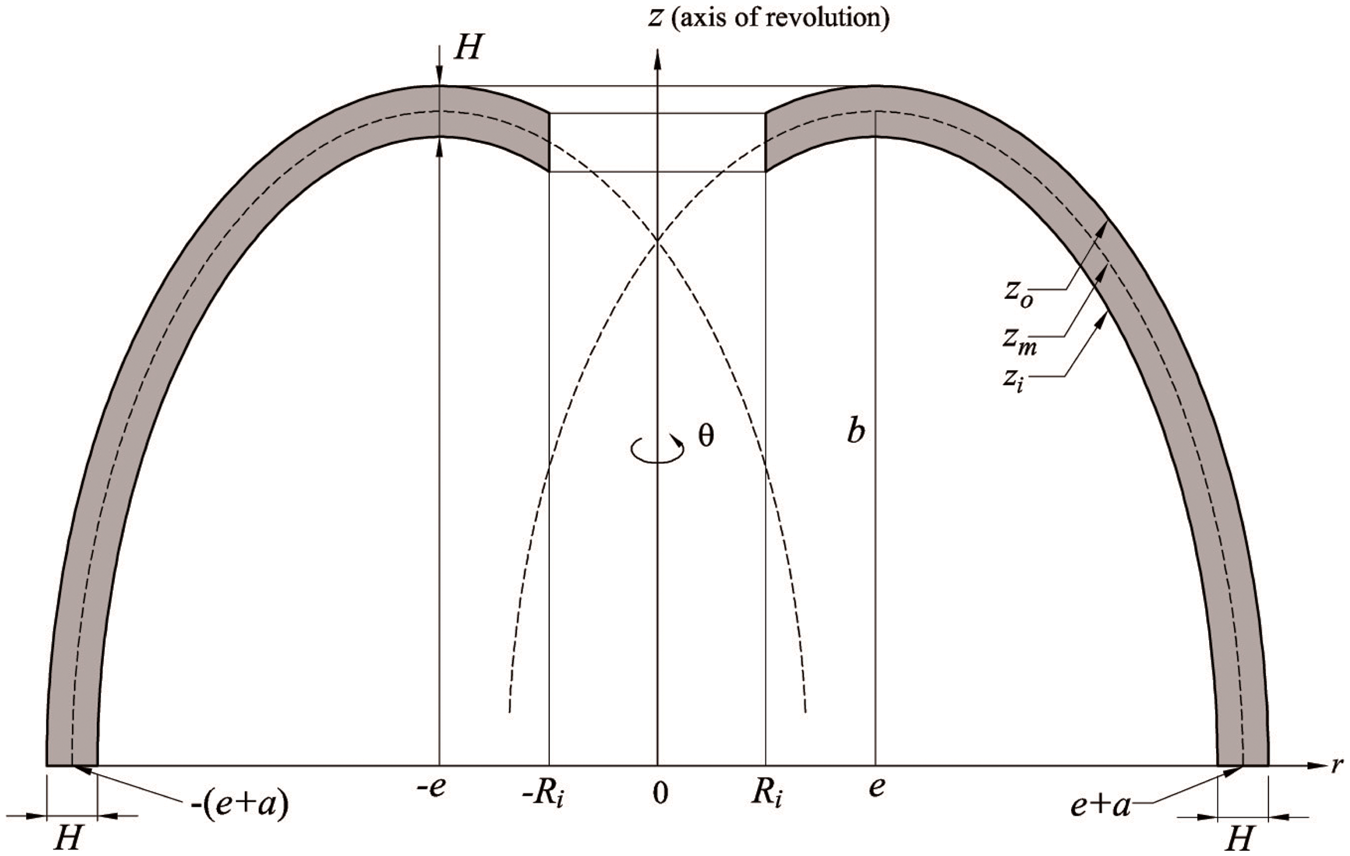
A representative cross-section of a hemi-ellipsoidal shell of revolution with eccentricity of e and the lengths of major and minor axes 2 a and 2 b of the mid-surface () of the hemi-ellipsoidal shell segment having uniform thickness (H) is shown in Figure 1. The hemi-ellipsoidal shells of revolution with eccentricity are obtained by rotating the cross-section for in Figure 1 about the z-axis. The eccentricity (e) is the distance from the axis of revolution of the shell (z-axis) to the center of the hemi-ellipsoidal shell segment. Thus the mid-surface () of the shell for has the equation of . The cylindrical coordinate system (r, z, ) also shown in the figure is used in the analysis, where is the circumferential angle. The domain () of the shell is obtained by subtracting the inner portion
from the outer portion
where is the radius of the inner hole of the shell of revolution and are the coordinates of the inner and outer elliptical surface of the cross-section for in Figure 1, respectively,
For mathematical convenience, the radial (r) and axial (z) coordinates are made dimensionless as
A cross-section of a hemi-ellipsoidal shell of revolution with eccentricity (e) having uniform thickness (H) and the circular cylindrical coordinate system ().
Thus the domain () of the shell in terms of the non-dimensional circular cylindrical coordinates () are given by subtracting the inner portion
from the outer portion
where
with non-dimensional parameters of , , , and k defined by
Utilizing tensor analysis, the three equations of motion in terms of the circular cylindrical coordinate system (r, z,) are found to be (Sokolnikoff, 1956)
where the are the normal () and shear () stress components; , , and are the displacement components in the r, z, and directions, respectively; is mass density per unit volume; the commas indicate spatial derivatives; and the dots denote time derivatives.
The well-known relationships between the tensorial stresses () and strains () of isotropic, linear elasticity are
where and G are the Lamé parameters, expressed in terms of Young’s modulus (E) and Poisson’s ratio () for an isotropic solid as:
is the trace of the strain tensor, and is Kronecker’s delta.
The 3-D tensorial strains () are found to be related to the three displacements , , and , by (Sokolnikoff, 1956)
Substituting equations (10) and (12) into equations (9), one obtains a set of three second-order partial differential equations in , , and governing free vibrations. However, in the case of hemi-ellipsoidal shells with eccentricity, exact solutions are intractable because of the variable coefficients that appear in many terms. Alternatively, one may approach the problem from an energy perspective.
Because the strains are related to the displacement components by equations (12), unacceptable strain singularities may be encountered exactly at r = 0 due to the term 1/r when = 0 (no hole). Since a negligibly small hole () does not affect the frequencies (Kang and Leissa, 2004), such singularities may be avoided by replacing the range for in equations (5) and (6), , with .
During vibratory deformation of the body, its strain (potential) energy (V) is the integral over the domain ():
Substituting equations (10) and (12) into equation (13) results in the strain energy in terms of the three displacements:
where the tensorial strains are expressed in terms of the three displacements by equations (12).
The kinetic energy (T) is simply
For the free, undamped vibration, the time (t) response of the three displacements is sinusoidal and, moreover, the circular symmetry of the body of revolution allows the displacements to be expressed by
where , , and are displacement functions of and , is a natural frequency, and is an arbitrary phase angle determined by the initial conditions. The circumferential wave number is taken to be an integer (n = 0, 1, 2, … , ), to ensure periodicity in . It may be verified by substituting the displacements into the 3-D equations of motion (Kang and Leissa, 2001) that the variable separable form of equations (16) does apply. Then equations (16) account for all free vibration modes except for the torsional ones. These modes arise from an alternative set of solutions which are the same as equations (16), except that and are interchanged. For , this set duplicates the solutions of equations (16), with the symmetry axes of the mode shapes being rotated. But for n = 0 the alternative set reduces to , , which corresponds to the torsional modes. The displacements uncouple by circumferential wave number (n), leaving only coupling in r (or ) and z (or ).
The Ritz method uses the maximum potential (strain) energy () and the maximum kinetic energy () functionals in a cycle of vibratory motion. The functionals for the shell are obtained by setting and equal to unity in equations (14) and (15) after the displacements (16) are substituted, and by using the non-dimensional coordinates and , as follows:
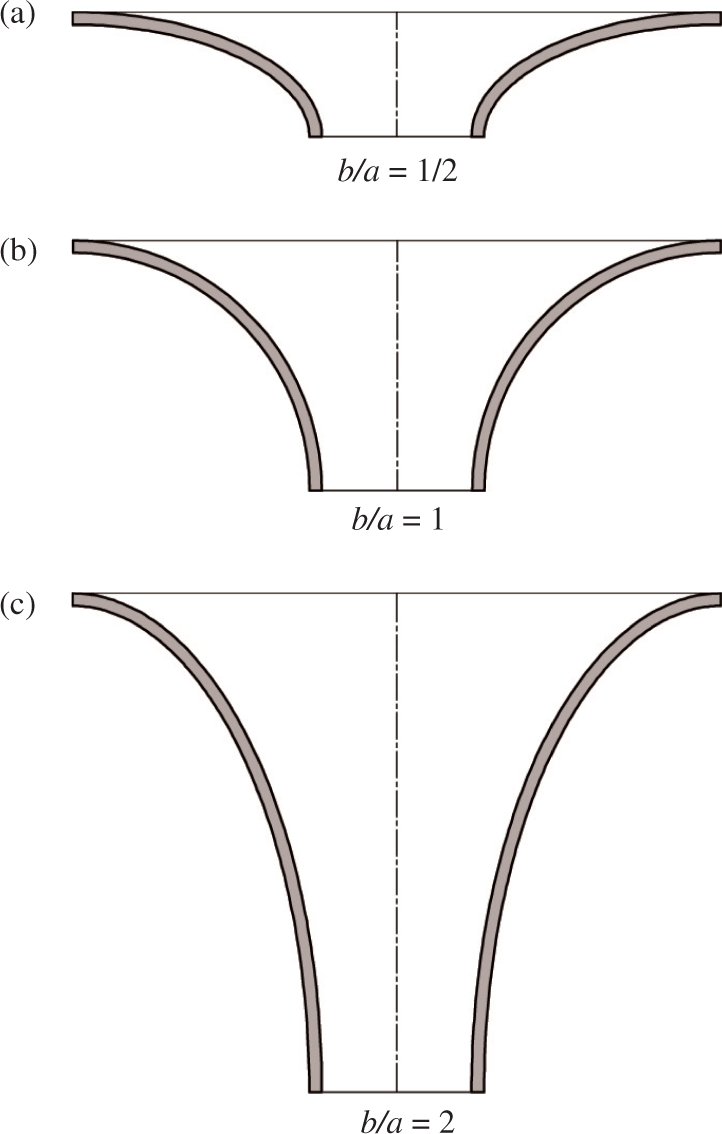
The displacement functions , and in equations (16) are further assumed as algebraic polynomials,
and similarly for , where i, j, k, l, m, and n are integers; I, J, K, L, M, and N are the highest degrees taken in the polynomial terms; , and are arbitrary coefficients to be determined, and the are functions depending upon the geometric boundary conditions to be enforced. For example:
1. Completely free: ,
2. The bottom edge fixed: ,
The functions of shown above impose only the necessary geometric constraints related to displacement boundary conditions. Together with the algebraic polynomials in equations (24), they form function sets which are mathematically complete (Kantorovich and Krylov, 1958). Thus, the function sets are capable of representing any 3-D motion of the shell with increasing accuracy as the indices I, J, … , N are increased. In the limit, as sufficient terms are taken, all internal kinematic constraints vanish, and the functions (24) will approach the exact solution as closely as desired.
The eigenvalue problem is formulated by minimizing the free vibration frequencies with respect to the arbitrary coefficients , , and , thereby minimizing the effects of the internal constraints present, when the upper limits (I, J, … , N) become large. This corresponds to the equations (Ritz, 1909):
Equations (25) yield a set of (I + 1)(J + 1) + (K + 1)(L + 1) + (M + 1)(N + 1) linear, homogeneous, algebraic equations in the unknowns , , and . The equations can be written in the form
where K and M are stiffness and mass matrices resulting from the maximum strain energy () and the maximum kinetic energy (), respectively, and is an eigenvalue of the vibrating system, expressed as the square of non-dimensional frequency, , and the vector x takes the form
For a non-trivial solution, the determinant of the coefficient matrix is set equal to zero, which yields the frequencies (eigenvalues); that is to say . These frequencies are upper bounds on the exact values. The mode shape (eigenfunction) corresponding to each frequency is obtained, in the usual manner, by substituting each back into the set of algebraic equations, and solving for the ratios of coefficients.
3. Convergence studies
To guarantee the accuracy of frequencies obtained by the procedure described above, it is necessary to conduct some convergence studies to determine the number of terms required in the power series of equations (24). A convergence study is based upon the fact that, if the displacements are expressed as power series, all the frequencies obtained by the Ritz method should converge to their exact values in an upper bound manner. If the results do not converge properly, or converge too slowly, it would be likely that the assumed displacement functions chosen are poor ones, or are missing some functions from a minimal complete set of polynomials.
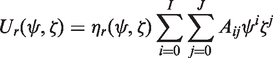
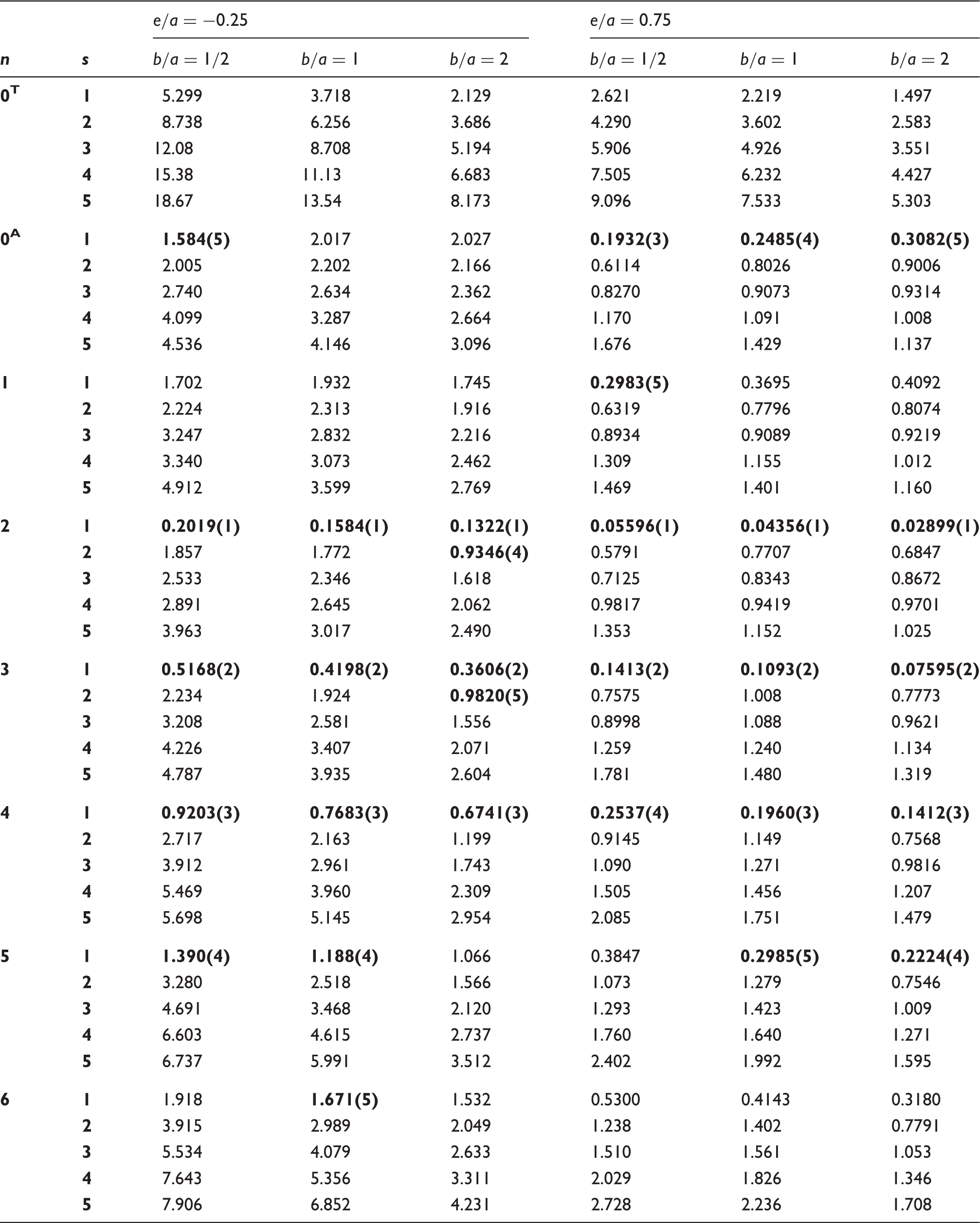
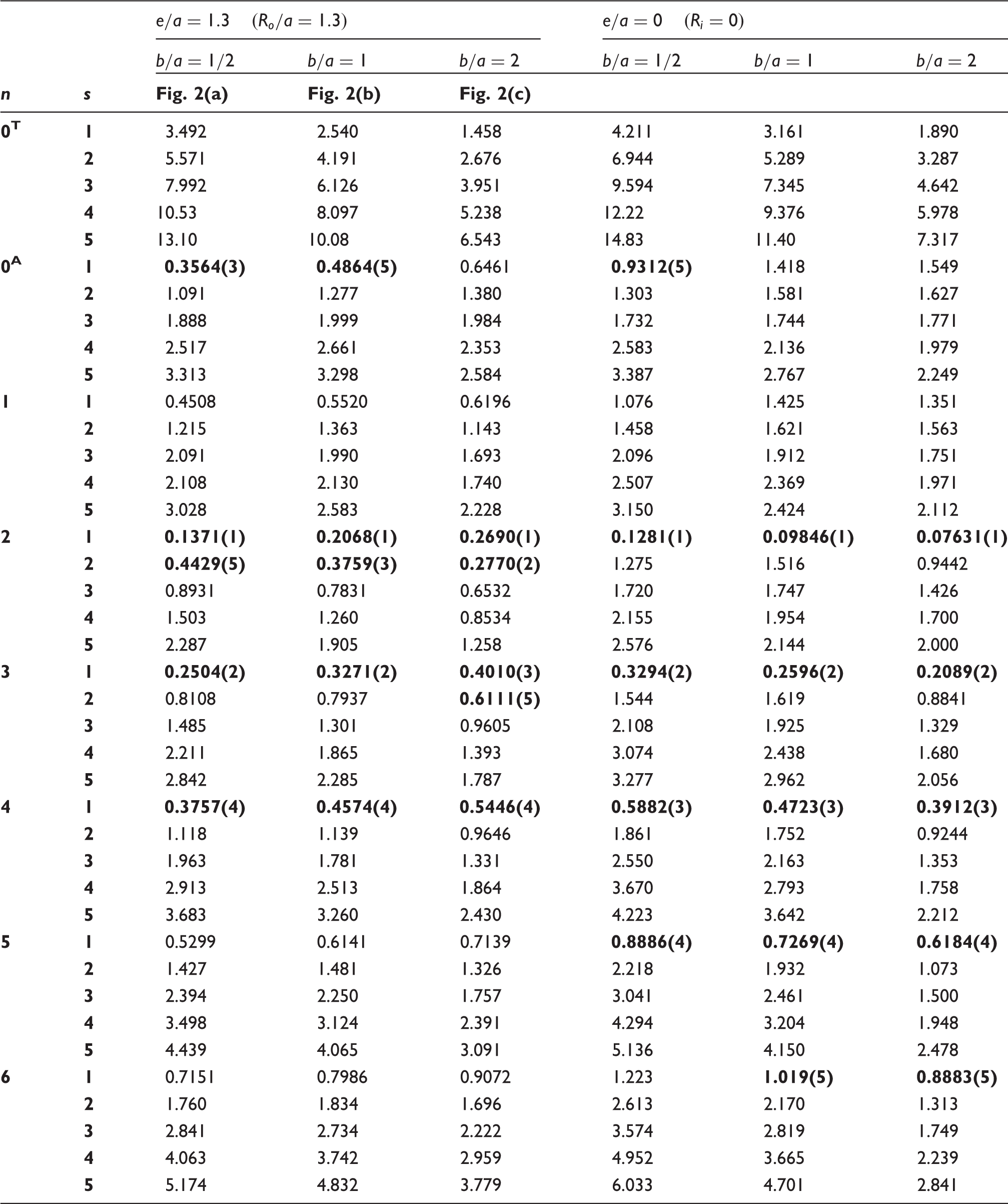
Tables 1–3 are such a study for free hemi-ellipsoidal shells of revolution with = (0.25, 2) (for Table 1), = (0.75, 0.5) (for Table 2), and = (1.3, 2) (for Table 3), where and , having uniform thickness (H/a = 0.05). The shell configuration for Table 3 is depicted in Figure 2(c). The radius Ro in Table 3 and Figure 2(c) stands for the maximum outer radius of the shell. The tables list the first five non-dimensional frequencies in for = 0.3, for torsional (n = 0T), axisymmetric (n = 0A), and bending (n = 2) modes, respectively. The bending modes (n = 2) have two circumferential waves in their mode shapes.
Cross-sections of hemi-ellipsoidal shells of revolution with eccentricity of having uniform thickness of and .
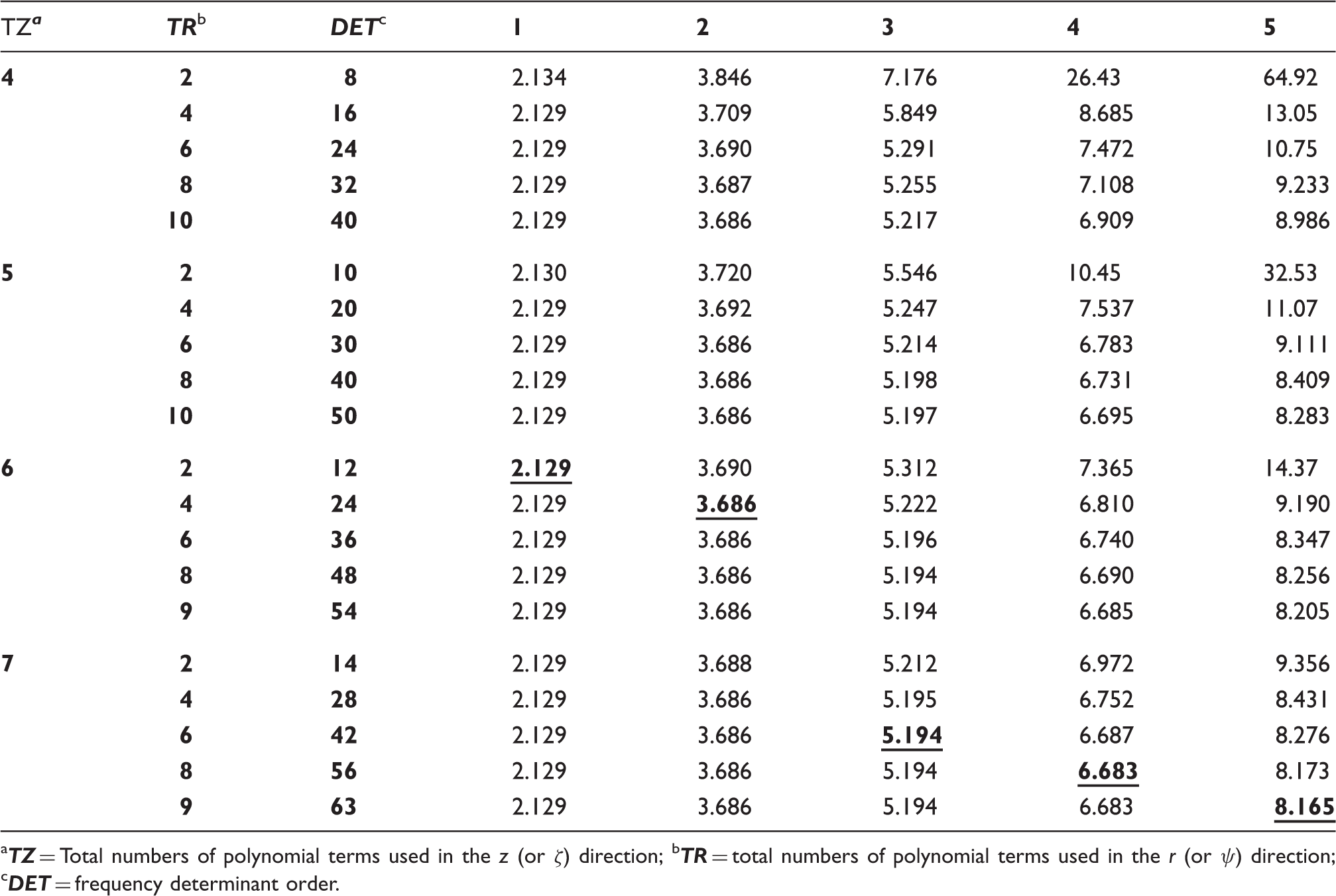
Convergence of frequencies in of a free, closed (Ri = 0) hemi-ellipsoidal shell of revolution with eccentricity (e/a = −0.25) for the five lowest torsional modes (n = 0T) for b/a = 2 and H/a = 0.05 ( = 0.3).
TZ = Total numbers of polynomial terms used in the z (or ) direction; bTR = total numbers of polynomial terms used in the r (or ) direction; cDET = frequency determinant order.
Convergence of frequencies in of a free, closed (Ri = 0) hemi-ellipsoidal shell of revolution with eccentricity (e/a = 0.75) for the five lowest axisymmetric modes (n = 0A) for b/a = 1/2 and H/a = 0.05 ( = 0.3).
TZ = Total numbers of polynomial terms used in the z (or ) direction; bTR = total numbers of polynomial terms used in the r (or ) direction; cDET = frequency determinant order.
Convergence of frequencies in of a free hemi-ellipsoidal shell of revolution with eccentricity (e/a = 1.3) for the five lowest bending modes (n = 2) for b/a = 2, H/a = 0.05, and Ro/a = 1.3 ( = 0.3).
TZ = Total numbers of polynomial terms used in the z (or ) direction; bTR = total numbers of polynomial terms used in the r (or ) direction; cDET = frequency determinant order.
The range of in equations (5) and (6), , must be replaced by for the shell configurations in Figure 2.
To make the study of convergence less complicated, equal numbers of polynomial terms were taken in both the r (or ) coordinate (i.e., I = K = M) and z (or ) coordinate (i.e., J = L = N), although some computational optimization could be obtained for some configurations and some mode shapes by using unequal numbers of polynomial terms.
The symbols TZ and TR in the Tables 1--3 indicate the total numbers of polynomial terms used through the axial (z or ) and the radial (r or ) directions, respectively. Note that the frequency determinant order DET is related to TZ and TR as follows:
Tables 1–3 show the monotonic convergence of all five frequencies as TZ ( = J + 1, L + 1, and N + 1 in equations (24)) are increased, as well as TR (=I + 1, K + 1, and M + 1 in equations (24)). It can be seen in Table 3, for example, that the first non-dimensional frequency in for n = 2 converges to four digits (0.2690) when (TZ,TR) = (5,10) terms are used, which results in DET = 3(510) = 150.
It is interesting to note in Tables 1–3 that the modes for n = 2 require much larger size of DET compared with the torsional (n = 0T) and the axismmetric modes (n = 0A). This is primarily because only the circumferential displacement component () is involved in the torsional modes, and the radial () and axial () displacement components are involved in the axisymmetrical modes, whereas all three components enter into the modes with , as seen in equations (28).
Frequencies in underlined, bold-faced type in Tables 1–3 are the most accurate values (to four significant figures) achieved with the smallest determinant sizes.
4. Numerical results and discussion
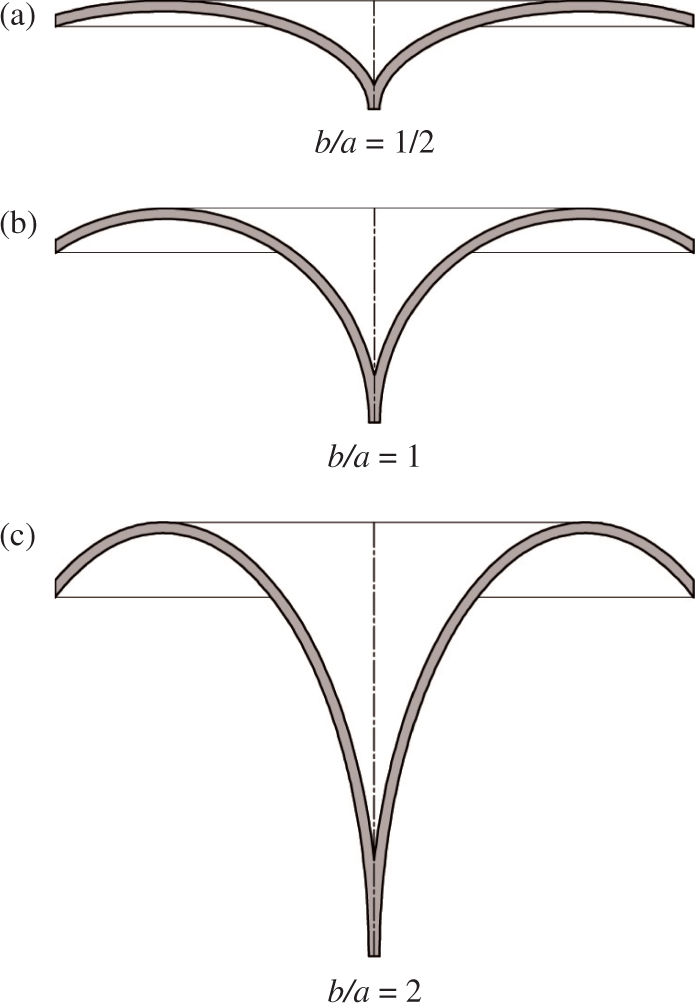
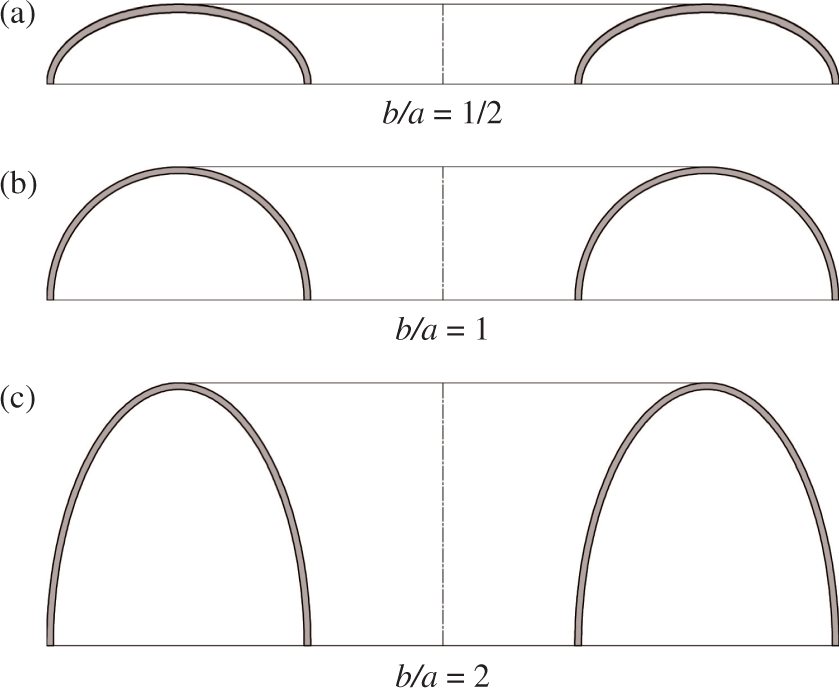
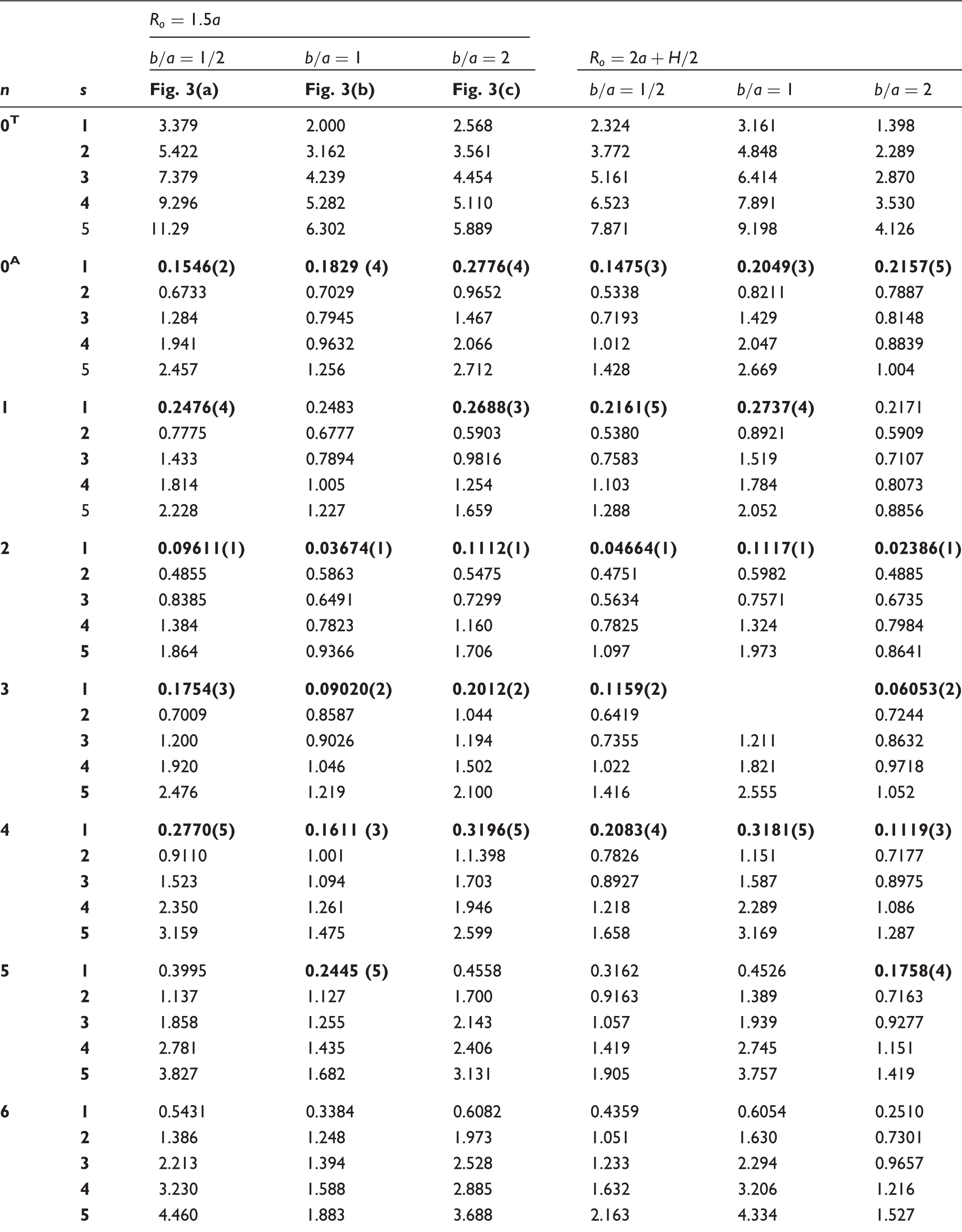
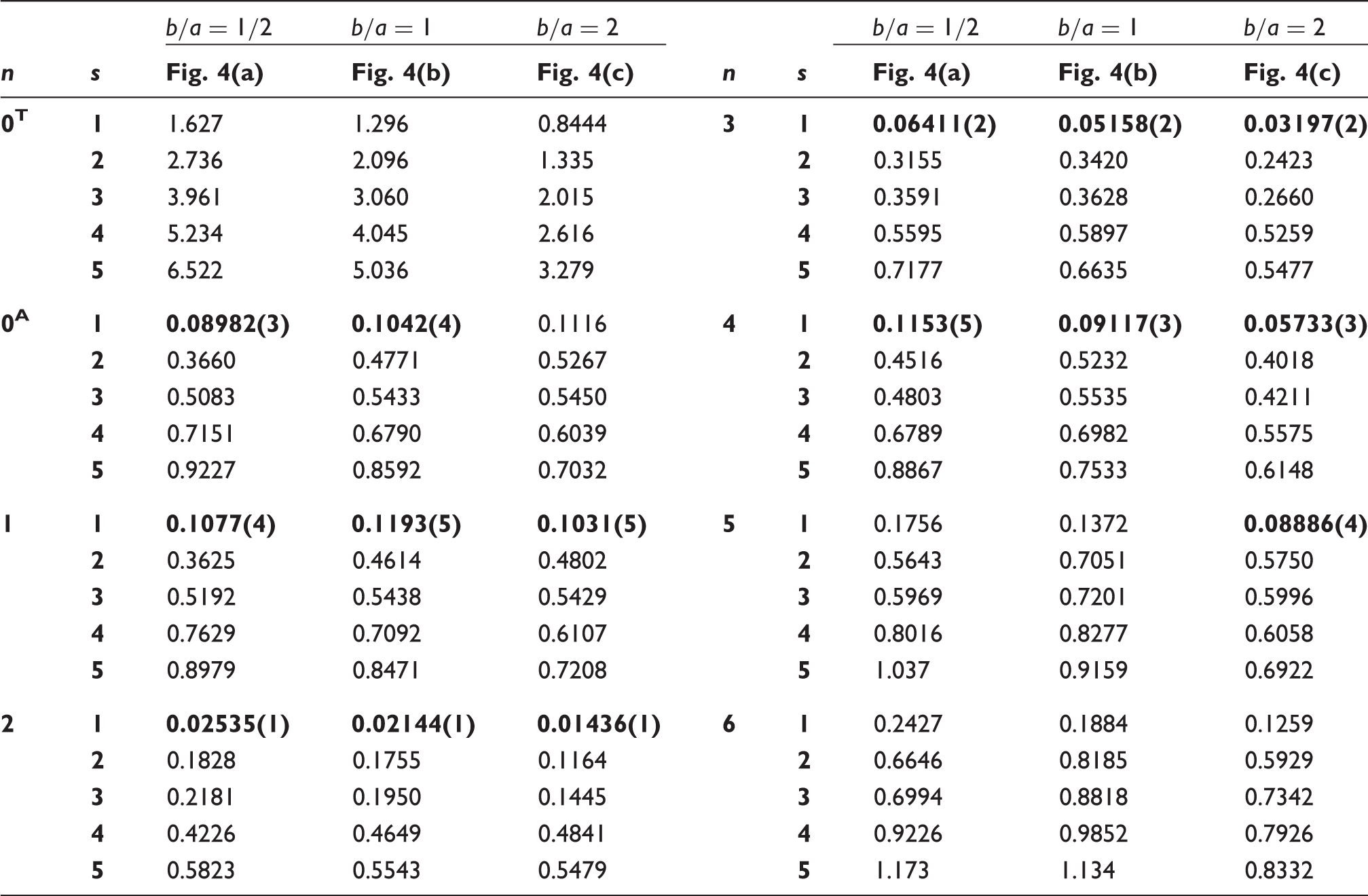
Tables 4–7 present the non-dimensional frequencies in of free hemi-ellipsoidal shells of revolution with various range of eccentricity of and three aspect ratios ( = 1/2, 1, and 2) for each . Tables 4–7 are for = 0.25 and 0.75, = 1.3 and 0, = 1, and = 2, respectively. Each table is for the shells of uniform thickness of . Poisson’s ratio () was taken to be 0.3. Forty frequencies are given for each configuration, which arise from eight circumferential wave numbers (n = 0T, 0A, 1, 2, 3, 4, 5, 6) and the first five modes (s = 1, 2, 3, 4, 5) for each value of n, where the superscripts T and A indicate torsional and axisymmetric modes, respectively. The numbers in parentheses identify the first five frequencies for each configuration. For example, in the case of and in Table 4, the first five frequencies are modes for (n, s) = (2,1), (3,1), (4,1), (5,1), and (0A,1) in this order. The zero frequencies of rigid body modes are omitted from the tables. The shell configurations for Tables 5–7 are depicted in Figures 2–4.
Cross-sections of closed ( = 0) hemi-ellipsoidal shells of revolution with eccentricity of having uniform thickness of and .
Cross-sections of hemi-ellipsoidal shells of revolution with eccentricity of having uniform thickness of .
Frequencies in of free, closed () hemi-ellipsoidal shells of revolution with eccentricity having constant thickness (H/a = 0.05) for = 0.3.
n
s
0T
1
5.299
3.718
2.129
2.621
2.219
1.497
2
8.738
6.256
3.686
4.290
3.602
2.583
3
12.08
8.708
5.194
5.906
4.926
3.551
4
15.38
11.13
6.683
7.505
6.232
4.427
5
18.67
13.54
8.173
9.096
7.533
5.303
0A
1
1.584(5)
2.017
2.027
0.1932(3)
0.2485(4)
0.3082(5)
2
2.005
2.202
2.166
0.6114
0.8026
0.9006
3
2.740
2.634
2.362
0.8270
0.9073
0.9314
4
4.099
3.287
2.664
1.170
1.091
1.008
5
4.536
4.146
3.096
1.676
1.429
1.137
1
1
1.702
1.932
1.745
0.2983(5)
0.3695
0.4092
2
2.224
2.313
1.916
0.6319
0.7796
0.8074
3
3.247
2.832
2.216
0.8934
0.9089
0.9219
4
3.340
3.073
2.462
1.309
1.155
1.012
5
4.912
3.599
2.769
1.469
1.401
1.160
2
1
0.2019(1)
0.1584(1)
0.1322(1)
0.05596(1)
0.04356(1)
0.02899(1)
2
1.857
1.772
0.9346(4)
0.5791
0.7707
0.6847
3
2.533
2.346
1.618
0.7125
0.8343
0.8672
4
2.891
2.645
2.062
0.9817
0.9419
0.9701
5
3.963
3.017
2.490
1.353
1.152
1.025
3
1
0.5168(2)
0.4198(2)
0.3606(2)
0.1413(2)
0.1093(2)
0.07595(2)
2
2.234
1.924
0.9820(5)
0.7575
1.008
0.7773
3
3.208
2.581
1.556
0.8998
1.088
0.9621
4
4.226
3.407
2.071
1.259
1.240
1.134
5
4.787
3.935
2.604
1.781
1.480
1.319
4
1
0.9203(3)
0.7683(3)
0.6741(3)
0.2537(4)
0.1960(3)
0.1412(3)
2
2.717
2.163
1.199
0.9145
1.149
0.7568
3
3.912
2.961
1.743
1.090
1.271
0.9816
4
5.469
3.960
2.309
1.505
1.456
1.207
5
5.698
5.145
2.954
2.085
1.751
1.479
5
1
1.390(4)
1.188(4)
1.066
0.3847
0.2985(5)
0.2224(4)
2
3.280
2.518
1.566
1.073
1.279
0.7546
3
4.691
3.468
2.120
1.293
1.423
1.009
4
6.603
4.615
2.737
1.760
1.640
1.271
5
6.737
5.991
3.512
2.402
1.992
1.595
6
1
1.918
1.671(5)
1.532
0.5300
0.4143
0.3180
2
3.915
2.989
2.049
1.238
1.402
0.7791
3
5.534
4.079
2.633
1.510
1.561
1.053
4
7.643
5.356
3.311
2.029
1.826
1.346
5
7.906
6.852
4.231
2.728
2.236
1.708
Frequencies in of free hemi-ellipsoidal shells of revolution with eccentricity having constant thickness (H/a = 0.05) for = 0.3.
The ranges of in equations (5) and (6), , must be replaced by and for the shells in Figure 3 and by for the shells in Figure 4, respectively.
It is interesting to note in Tables 4–7 that, irrespective of shell configurations, the fundamental (lowest) frequencies are for modes with two (n = 2) circumferential waves in their modes, and the torsional frequencies (n = 0T) are all for higher modes. It is also seen that the axisymmetric modes (n = 0A) are more important as b/a becomes smaller for each . That is, they are among the lowest frequencies of the shells.
5. Comparisons with 2-d shell theory
Hwang (1965) analyzed the axisymmetrical (n = 0A) extensional vibrations of hemi-ellipsoidal shells of revolution including hemi-spherical shells ( = 1) as a special case of hemi-ellipsoidal shells with constant thickness applying a 2-D extensional thin shell theory considering only membrane-type stretching effects. He derived the differential equations and provided the solution with using a numerical method.
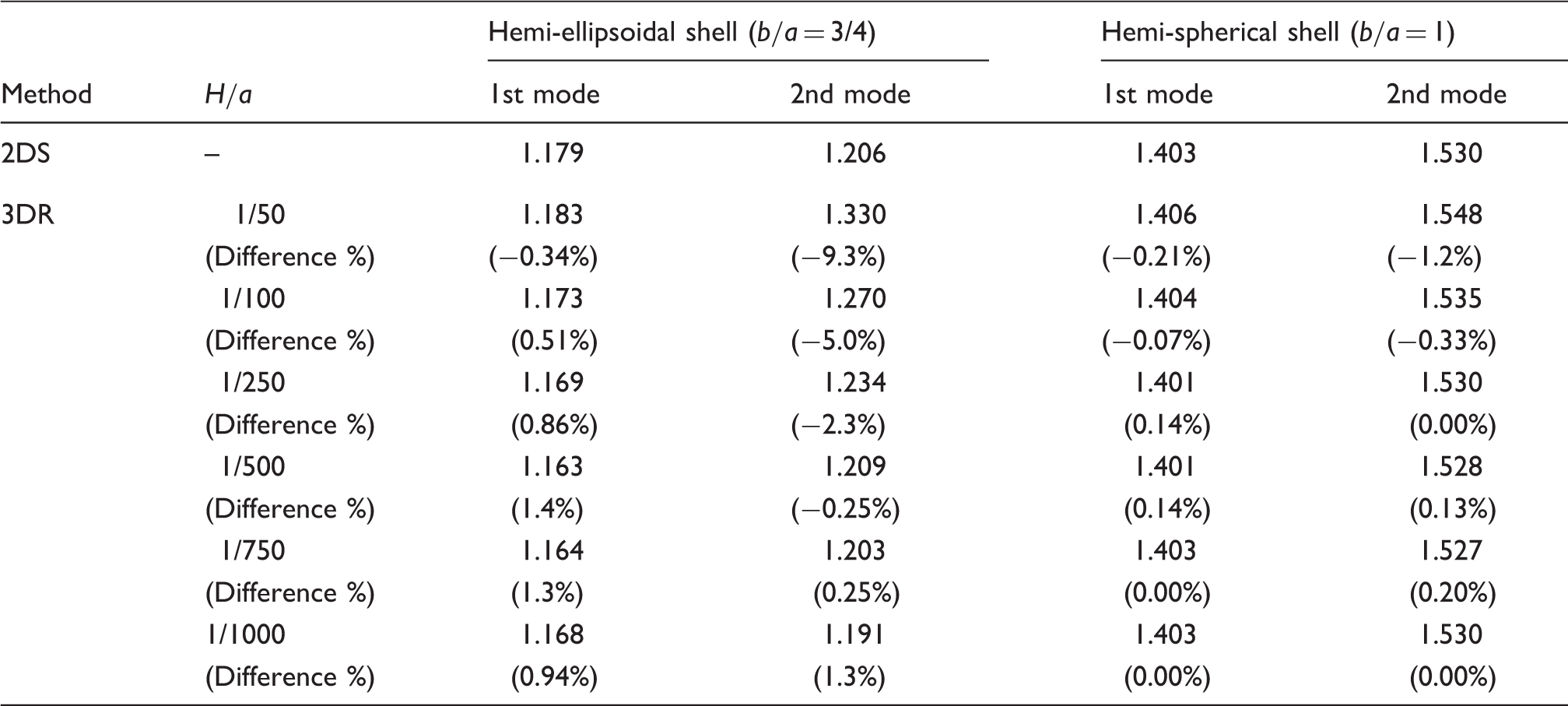
Comparisons of the present 3-D Ritz method (3DR) with the 2-D shell theory (2DS) of Hwang (1965) are made in Table 8 for the first two non-dimensional axisymmetric (n = 0A) frequencies in of completely free, thin, closed ( = 0) hemi-ellipsoidal ( = 3/4) and hemi-spherical ( = 1) shells of revolution with no eccentricity () having various shell thicknesses of = 1/50, 1/100, 1/250, 1/500, 1/750, and 1/1000, and = 0.3. However, the 2-D shell theory did not give any information on shell thickness. The percent difference in frequencies obtained by the two analyses is given by
Comparisons of the first two non-dimensional axisymmetric (n = 0A) frequencies in of completely free, thin, closed ( = 0) hemi-ellipsoidal ( = 3/4) and hemi-spherical ( = 1) shells of revolution with no eccentricity ( = 0) from the present 3-D Ritz (3DR) method and the 2-D shell theory (2DS) for = 0.3.
Method
Hemi-ellipsoidal shell ( = 3/4)
Hemi-spherical shell ( = 1)
1st mode
2nd mode
1st mode
2nd mode
2DS
–
1.179
1.206
1.403
1.530
3DR
1/50
1.183
1.330
1.406
1.548
(Difference %)
(−0.34%)
(−9.3%)
(−0.21%)
(−1.2%)
1/100
1.173
1.270
1.404
1.535
(Difference %)
(0.51%)
(−5.0%)
(−0.07%)
(−0.33%)
1/250
1.169
1.234
1.401
1.530
(Difference %)
(0.86%)
(−2.3%)
(0.14%)
(0.00%)
1/500
1.163
1.209
1.401
1.528
(Difference %)
(1.4%)
(−0.25%)
(0.14%)
(0.13%)
1/750
1.164
1.203
1.403
1.527
(Difference %)
(1.3%)
(0.25%)
(0.00%)
(0.20%)
1/1000
1.168
1.191
1.403
1.530
(Difference %)
(0.94%)
(1.3%)
(0.00%)
(0.00%)
It is observed that the 3-D Ritz method yields exactly the same or lower frequencies than the 2-D thin shell results as the thickness parameter becomes smaller (i.e., %difference has zero or positive values). It is very strange that the frequencies by 3DR are higher than ones by 2DS for large , since an accurate 3-D analysis should typically yield lower frequencies than those in 2-D thin shell theory, mainly because shear deformation and rotary inertia effects are accounted for in a 3-D analysis, but not in 2-D, thin shell theory. It is noticed that the frequency differences for the second modes are larger than for the first ones, as expected. It is interesting that the differences for hemi-spherical shells ( = 1) are smaller than for hemi-ellipsoidal ones ( = 3/4).
6. Concluding remarks
Extensive and accurate frequency data determined by the 3-D Ritz analysis have been presented for hemi-ellipsoidal shells of revolution with eccentricity having uniform thickness. The analysis uses the 3-D equations of the theory of elasticity in their general forms for isotropic materials, and they are only limited to small strains. No other constraints are placed upon the displacements. This is in stark contrast with the classical 2-D thin shell theories, which make very limiting assumptions about the displacement variation through the shell thickness.
The method is straightforward, but it is capable of determining frequencies and mode shapes as close to the exact ones as desired. Therefore, the data in Tables 4–7 may be regarded as benchmark results against which 3-D results obtained by other methods, such as finite elements and finite differences, may be compared to determine the accuracy of the latter. Moreover, the frequency determinants required by the present method are at least an order of magnitude smaller than those needed by finite element analyses of comparable accuracy. This was demonstrated extensively in a paper by McGee and Leissa (1991). The Ritz method guarantees upper bound convergence of the frequencies in terms of function sets that are mathematically complete, such as algebraic polynomials. Some finite element methods can also accomplish this, but at much greater costs, and others cannot.
The method presented could also be extended to circumferentially open () hemi-ellipsoidal shells with eccentricity, instead of circumferentially closed () ones considered in the present work. However, the periodicity in would not be present. It would be necessary then to replace the double sums of algebraic polynomials in equations (24) by triple sums, with polynomials in being included.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
References
1.
Al-JumailyAMNajimFM (1997) An approximation to the vibrations of oblate spheroidal shells. Journal of Sound and Vibration204(4): 561–574.
2.
BedrosianBDiMaggioFL (1972) Transient response of submerged spheroidal shells. International Journal for Solids and Structures8(1): 111–129.
3.
BergerBS (1974) The dynamic response of a prolate spheroidal shell submerged in an acoustical medium. Journal of Applied Mechanics41: 925–929.
4.
BurroughsCBMagrabEB (1978) Natural frequencies of prolate spheroidal shells of constant thickness. Journal of Sound and Vibration57(4): 571–581.
5.
CambouJP (1975) Vibrations libre et axisymetrique des reservoirs quasi-spherique. Acustica34: 72–76.
6.
ChenP-T (2001) Acoustic radiations for submerged elastic structures using natural mode expansions in conjunction with radiation modes approach. Journal of Sound and Vibration246(2): 245–263.
7.
ChenP-TGinsbergJH (1992) Modal properties and eigenvalue veering phenomena in the axisymmetric vibration of spheroidal shells. Journal of the Acoustical Society of America92(3): 1499–1508.
8.
DiMaggioFLRandR (1966) Axisymmetric vibrations of prolate spheroidal shells. Journal of the Acoustical Society of America40(1): 179–186.
9.
DiMaggio FL and Silbiger A (1960) Free extensional torsional vibrations of a prolate spheroidal shell. Contract No. 266(67), Project 385–414, Technical Report No. 2, Office of Naval Research.
10.
DiMaggioFLSilbigerA (1961) Free extensional torsional vibrations of a prolate spheroidal shell. Journal of the Acoustical Society of America33(1): 56–58.
11.
GontkevichVS (1964) Natural Vibrations of Shells in a Liquid, Kiev: Naukova Dumkain Russian.
12.
HayekS (1970) Complex natural frequencies of vibration submerged spheroidal shells. International Journal for Solids and Structures6(3): 333–351.
13.
Hayek S and DiMaggio FL (1965) Axisymmetric vibrations of submerged spheroidal shells. Contract No. 266(67) Project 355–414, Technical Report No. 4, Office of Naval Research.
14.
Hwang C (1964) Extensional vibration of axisymmetrical shells. 5th AIAA Annals of Structures and Material Conference, Palm Springs, CA, 227–234.
15.
HwangC (1965) Extensional vibration of axisymmetrical shells. AIAA Journal3(1): 23–26.
16.
Jones-Oliveira JB (1990) Fluid-solid interaction of a prolate spheroidal shell structures loaded by an acoustic shock wave. Ph.D. Dissertation, Massachusetts Institute of Technology.
KangJ-HLeissaAW (2001) Three-dimensional field equations of motion, and energy functionals for thick shells of revolution with arbitrary curvature and variable thickness. Journal of Applied Mechanics68: 953–954.
19.
KangJ-HLeissaAW (2004) Three-dimensional vibrations of thick spherical shell segments with variable thickness. Journal of Vibration and Control10(2): 199–214.
20.
KangJ-HLeissaAW (2008) Vibration analysis of solid ellipsoids and hollow ellipsoidal shells of revolution with variable thickness from a three-dimensional theory. Acta Mechanica197: 97–117.
21.
KantorovichLVKrylovVI (1958) Approximate Methods of Higher Analysis, Groningen, The Netherlands: Noordhoff International Publishers, pp. 266–268.
22.
Leissa AW (1973) Vibration of Shells. NASA SP 288; US Government Printing Office (reprinted by The Acoustical Society of America, 1993).
23.
McGeeOGLeissaAW (1991) Three-dimensional free vibrations of thick skewed cantilever plates. Journal of Sound and Vibration144: 305–322. Errata 149, 539–542).
24.
NemergutPJBrandRS (1965) Axisymmetric vibrations of prolate spheroidal shells. Journal of the Acoustical Society of America38(2): 262–265.
25.
PenzesLE (1969) Free vibrations of thin orthortropic oblate spheroidal shells. Journal of the Acoustical Society of America45(2): 500–505.
26.
Penzes LE and Burgin G (1965) Free vibrations of thin isotropic oblate spheroidal shells. Report No. CD/CBTD, Convair Division, General Dynamics, 65–113.
27.
PenzesLEBurginG (1966) Free vibrations of thin isotropic oblate-spheroidal shells. Journal of the Acoustical Society of America39(1): 8–13.
28.
PopovALChernyshevGN (1985) Transition surfaces for short-wave vibrations of an ellipsoidal shell in a fluid. Journal of Applied Mathematics and Mechanics49(5): 620–624.
29.
QatuMS (2002) Recent research advances in the dynamic behavior of shells. Part 2: Homogeneous shells. Applied Mechanics Reviews55(5): 415–434.
30.
RandR (1968) Torsional vibrations of elastic prolate spheroids. Journal of the Acoustical Society of America44(3): 749–751.
31.
RandRDiMaggioFL (1967) Vibrations of fluid-filled spherical and spheroidal shells. Journal of the Acoustical Society of America42(6): 1278–1286.
32.
RitzW (1909) Über eine neue Methode zur Lösung gewisser Variationsprobleme der mathematischen Physik. Zeitschrift für die Reine und Angewandte Mathematick135: 1–61.
33.
RossCTF (1996) Vibration and elastic instability of thin-walled domes under uniform external pressure. Thin-Walled Structures26(3): 159–177.
34.
RossCTFJohnsT (1983) Vibration of submerged hemi-ellipsoidal domes. Journal of Sound and Vibration91(3): 363–373.
35.
Ross EW Jr and Matthews WT (1966) Frequencies and mode shapes for axisymmetric vibration of shells. Technical Report AMRA TR 66-04, US Army Materials Research Agency.
36.
RossEWJrMatthewsWT (1967) Frequencies and mode shapes for axisymmetric vibration of shells. Journal of Applied Mechanics34(1): 73–80.
37.
ShimH-JKangJ-H (2004) Free vibrations of solid and hollow hemi-ellipsoids of revolution from a three-dimensional theory. International Journal of Engineering Science42: 1793–1815.
38.
ShiraishiNDiMaggioFL (1962) Perturbation solution for the axisymmetric vibrations of prolate spheroidal shells. Journal of the Acoustical Society of America34(11): 1725–1731.
39.
Silbiger A and DiMaggio FL (1961) Extensional axisymmetric second class vibrations of a prolate spheroidal shell. Contract No. 266(67) Project 385–414, Technical Report No. 3, Office of Naval Research.
40.
SokolnikoffIS (1956) Mathematical Theory of Elasticity, 2nd ed. New York: McGraw-Hill.
41.
YenTDiMaggioFL (1967) Forced vibrations of submerged spheroidal shells. Journal of the Acoustical Society of America41(3): 618–626.
42.
ZhangSHDanckertJYuanSJ (1998) Spherical and spheroidal steel structure products made by using integral hydro-bulge forming technology. Journal of Constructional Steel Research46(1–3): 338–339. paper number 225).