
Abstract
The main objective of the present work is to develop an algorithm consisting of the eigenvalue sensitivity and modal updating along with the mode tracking to analyze the dynamic behavior (i.e., vibrational properties) of a tensegrity structure. The optimum values of the design parameters including the pre-tension force, element section area, etc., are obtained to satisfy the desired vibrational properties of the structure. The optimum variables will be acceptable if the design constraints involving the buckling constraint for rod elements and the strength constraints for all components of the system are fully satisfied. The efficiency of the proposed algorithm for finding the optimum values of the design variables of the tensegrity structures is proved through the solution of three examples
1. Introduction
Tensegrities are structures whose integrity is based on a balance between tension and compression. They are a kind of spatial structural system composed of cable (in tension) and strut (in compression) elements with reticulated connections, and assembled in a self-balanced fashion (Barbarigos et al., 2010). Several definitions of tensegrity structures have been proposed so far, depending on their intended focus. A recent and most accepted definition was suggested by Motro (2003). More detailed information about different definitions for tensegrity systems can be found in Dalilsafaei et al. (2011b). Optimal design of tensegrity structures is relatively complex mainly because they have a nonlinear behavior.
Form-finding is, generally speaking, the process of obtaining a stable geometry based on a proper topology for the structure. Most of the form-finding related works produced in the literature tackle the problem of finding a self-stressed initial configuration from a given topology, for instance in Pellegrino (1986), Barnes (1999), Vassart and Motro (1999), Paul et al. (2005), Estrada et al. (2006) and Tran and Lee (2010a,b); although there are as well some works providing the finding of topology or even its optimization, for example in Linkwitz (1999), Kenner (2003), Masic et al. (2005) and Pagitz and Mirats-Tur (2009). Form-finding is usually seen as a distinct stage in the structural design process of tensegrity, yet it can also be considered as a part of the static analysis (Dalilsafaei et al., 2011b).
In spite of the vast literature on static characteristics of tensegrity, few works have focused on the study of their dynamic behavior. Motro et al. (1986) carried out dynamic experimental and numerical work on a tensegrity structure. They demonstrated that a linearized dynamic model provides a good approximation for analyzing the nonlinear behavior of tensegrity structures around an equilibrium configuration. Furuya (1992) developed the concept of deployable tensegrity structures focusing on space applications. He investigated the vibrational properties of a tensegrity mast and showed that the modal frequencies increase if the pre-stress increases. Oppenheim and Williams (2001a,b) studied the dynamic behavior of simple elastic tensegrity structures. Moussa et al. (2001) investigated a kind of modular tensegrity showing that the eigenvalues of tensegrity structures increase with the pre-tension in their cables. Sultan et al. (2002) used linearized dynamic models and concluded that modal dynamics increase with the pre-tension. Tan and Pellegrino (2008) studied the nonlinear vibration of a cable-stiffened pantographic deployable structure and demonstrated that the system natural frequencies are dependent on the level of cable pre-tension. Ali and Smith (2010) investigated dynamic behavior and vibration control of a full-scale active tensegrity structure. They showed numerically and experimentally that self-stress influences dynamic behavior. Besides, some researchers developed a complete dynamic model for a tensegrity structure, (Ben Kahla et al. 2000; Murakami, 2001a, 2001b; Carstens and Kuhl, 2005; Cefalo and Mirats Tur, 2011). A recent review on the dynamics of tensegrity structures was given in Mirats-Tur and Hernández (2009).
Although there are a number of existing research works on form-finding, there are no general guidelines for designing tensegrity structures. Kebiche et al. (1999) showed that many parameters including the level of pre-tension and rigidity ratio between trusses and cables are important to design tensegrity structures. More recently, Barbarigos et al. (2010) investigated the design of tensegrity structures using parametric analysis and stochastic search to design a pedestrian bridge. In practice, to design a tensegrity structure, an iterative method like a gradient base search is often used.Zhang et al. (2006) proposed a direct approach to design the geometry of tensegrity structures. Smaili and Motro (2007) demonstrated a design analysis of curved tensegrity systems and studied the deployment procedure requirements of such systems. Vu et al. (2006) studied the fundamental design concept of deployable cable-strut structures. Ali et al. (2010) developed a design optimization and dynamic analysis of tensegrity-based footbridge. They used a genetic algorithm to find a cost-effective design solution. More recently, Dalilsafaei et al. (2011b) proposed a method to design tensegrity structures based on stiffness modification. They developed a method to find a suitable pre-tension level for the tensegrity system. In a subsequent paper, Dalilsafaei et al. (2011a) employed the application of flexibility analysis for tensegrity structure design.
Consequently, an efficient tensegrity structure requires both static and dynamic behavior in its design process. In this paper, the form-finding step is assumed to have been completed in a previous stage. Starting from an initial design configuration, a sensitivity-based approach is employed to generate a design solution with predefined target vibration properties (i.e., eigenvalues and eigenvectors). Eigenvalue sensitivity technique and modal updating along with mode tracking are taken into account for modifying design variables. In the literature, this approach has been used for structural dynamic modification by many researchers such as Vanhonacker (1980), Saigal (1990), Okubo and Toi (2000), Anac and Basdogan (2007) and Wang et al. (2011). The main contribution is hence to include vibration-related design constraints, i.e., dynamic criteria, to the tensegrity structural design process. Here, design parameters are pre-tension force, element section area, and element mass of the tensegrity structure. These parameter modifications cause a change in the values of the modal properties; in other words, when the values of design parameters are modified the modal characteristics of the system are varied. The main goal of this work is that the design variables are set in such a way that the vibrational properties of the tensegrity system are close to the desired modal characteristics which are known via experimental or theoretical analyses. Furthermore, the obtained design parameters will solely be acceptable if all the requirements of the tensegrity structures, such as strength constraints for all elements and the buckling constraints for bar elements, are satisfied. In addition, since pre-tension is one of the considered design parameters, and infinitesimal mechanisms can be stabilized by pre-tension including infinitesimal mechanisms in the process of design, this will definitely provide a better overview of the design problem.
The rest of the paper is organized as follows: In Section 2, the eigenvalue and eigenvector sensitivity analysis and model updating along with the theory of mode tracking is developed. Section 3 analyzes the proposed methodology by solving three different numerical examples. Conclusions are outlined in Section 4, and, finally, in order to maintain the paper self-contained, a linearized dynamic which is valid only around equilibrium configuration is provided to explain the dynamic behavior of the tensegrity structure in the Appendix. It should be noted that these formulations are developed by Ali and Smith (2010) and are reproduced for simplicity and clarity.
2. Eigenvalue sensitivity computations with mode tracking
The problem of modification mathematically includes the minimization of an objective function
The generalized eigenproblem of tensegrity structure can be written as:


After some algebraic manipulations (Ewins, 2000; Trisovic, 2007), equation (2) may be written as:
The eigenvalue sensitivity of mode r th to the jth design variable can be calculated from equation (3). It can be seen from equation (3) that the sensitivity of an eigenvalue to a design variable depends on the eigenvalue, the corresponding eigenvector as well as the sensitivity of mass and stiffness matrices to the design variable (Ewins, 2000; Trisovic, 2007).
The sensitivity matrix is used when the influence of two or more design parameters are simultaneously considered on eigenvalue sensitivity. Here, pre-tension force, and area of section, A, etc. can be considered as design parameters, therefore the sensitivity matrix is written as:
In other words, the sensitivity matrix explains how the structural frequencies of a tensegrity model are influenced by modifications of the chosen design parameters. Equation (3) can be written as follows when some design parameters have to be simultaneously updated:
Here,

The updated solution vector can be computed by adding the correction vector to the previous value of the design parameter vector. This process is iteratively repeated until the correction vector approaches zero. The case of no convergence to zero, the error vector would indicate a mismatch between the desired mode and the analytical one. The non-convergence can be attributed to the fact that in the structural optimization of free vibrational problems the modal order may change. In other words, the eigenvalues as well as the order of modes of the structural system may fluctuate at every iteration step, during the iterative optimization procedure. Under such conditions, a mode tracking strategy will be necessary for optimal structure design. In this study, modal assurance criterion (MAC) is used for the structural optimization as a mode tracking approach (Kim and Kim, 2003; Enomoto and Sakamoto, 2009). MAC is described as a scalar constant relating the degree of linearity between one modal and another reference modal vector (Allemang, 2003). In other words, MAC is employed to make sure that in the updating procedure the mode switching does not happen. In cases when mode switching happens the updating does not end with reasonable results. So, to track the objective mode, a mode tracking algorithm which updates the objective mode at each iteration step is proposed. At the first step, the eigenvectors of the desired modes at the initial configuration are chosen as the reference vectors. MAC values for reference modes and extracted modes are checked during the following iterations. The frequencies of the closest modes to the reference modes are obtained, and they are used in the objective function. Mathematical derivation of the MAC is shown in equation (6):

Considering two vectors
2.1. Constraints
This section is focused on constraints associated with tensegrity structures, specifically, strength and buckling constraints. For a description about a linear dynamic behavior of tensegrity systems which is valid only around an equilibrium point please refer to the Appendix.
2.1.1. Strength Constraints
In terms of keeping structure reliability all elements of a tensegrity structure must be prevented from yielding. This constraint can be mathematically stated as follows:


It is assumed that the form-finding stage has been completed, therefore the feasible node coordinates, the element pre-tensioned lengths li, and the normalized force density coefficients (force fi to length li ratio,
2.1.2. Buckling Constraints
Truss elements are the only elements that may be compressed, so buckling constraints can only be applied to bar elements. Euler buckling for rod elements is defined as follows:
The proposed algorithm is outlined in Figure 1. It is utilized whenever the dynamic criteria are taken into account in the design process. First of all, initial values of the design parameters are logically chosen: for instance, an infinitesimally small area should not be used along with a very large value of pre-tension force. Secondly, the modal characteristics (i.e. eigenvalues and eigenvectors) of the system are calculated based on initial values. In order to minimize the differences between the desired eigenvalues and those obtained from finite element analysis (FEA), the methods of eigenvalue sensitivity and model updating are used as equation (5a). Through the model updating procedure the obtained sensitivity matrix is inverted and then multiplied by the error vector, indicating the difference between the desired and the predicted frequencies as equation (5b). Therefore, the design variables are changed iteratively until the eigenvalues converge to the desired frequencies. This allows finding the required design variables for which the error tends to zero. In case this error is far from zero, the MAC should be employed. In this procedure, all eigenvectors obtained at each iteration using the above mentioned optimization method are compared with the reference mode which is determined from the initial configuration. Among all extracted modes, an eigenvector is selected which has the maximum value of MAC with respect to reference mode.Using this eigenvector which is the updated objective function, the design parameters are updated. This process is repeated until the error tends to zero. Finally, the obtained design variables are accepted provided the strength constraints of all tensegrity elements and the buckling constraints of the truss elements are satisfied. Otherwise, they are not acceptable since the resulting tensegrity structure would not be stable; in other words, the tensegrity system could not be constructed with such eigenvalues.
Optimization algorithm with mode tracking.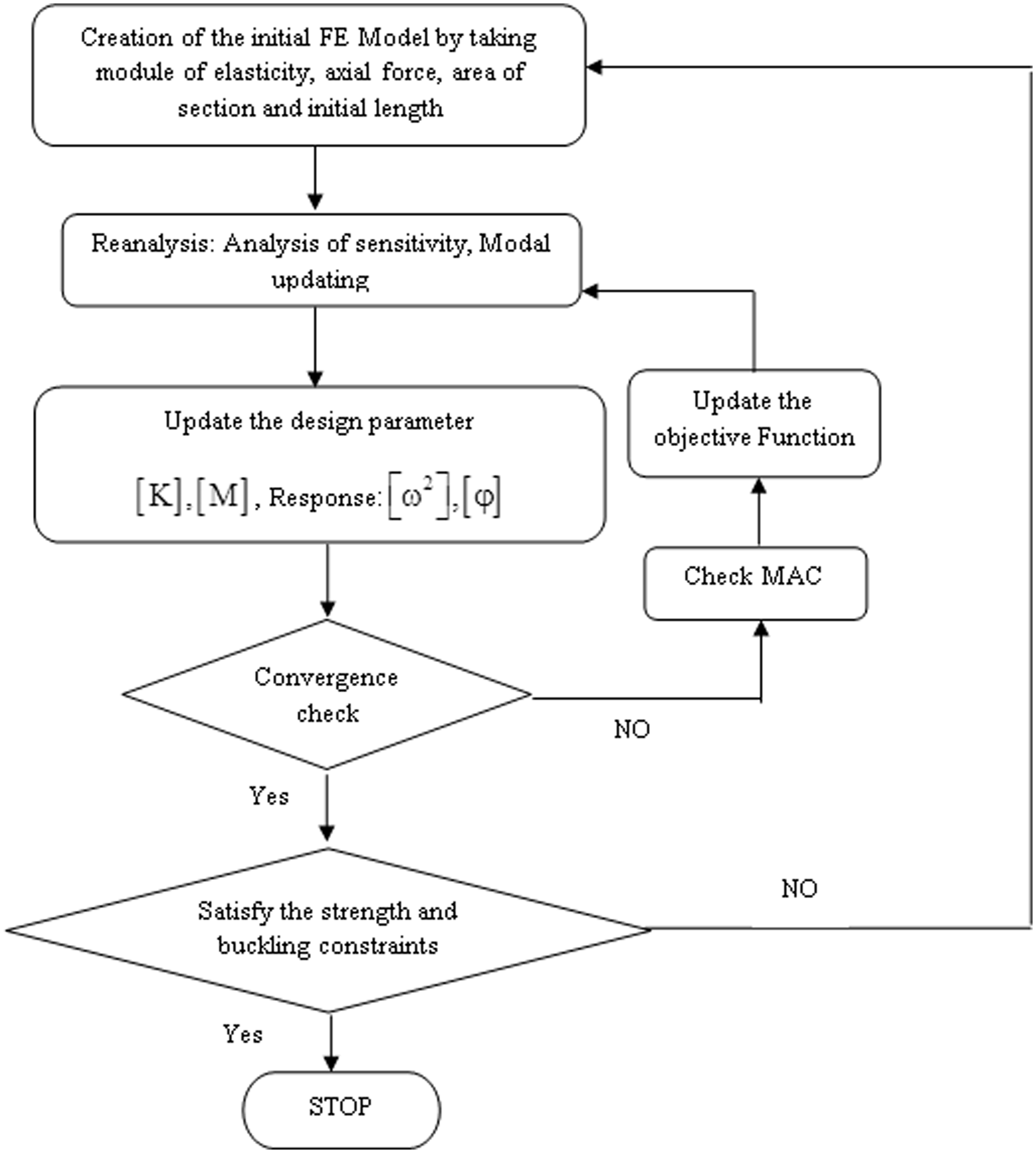
3. Numerical examples
Three numerical examples are provided to show the efficiency of the new proposed approach. MATLAB (Version 2007a) software is used for programming. In the first two numerical examples the structures are considered at the state of pre-stress with constrained (fixed) nodes and zero external loads, whereas in the third example a constrained-free double layer tensegrity grid is chosen in order to consider both the deformation modes and the infinitesimal mechanism effects on the dynamic behavior of the tensegrity structure. It should be noted that the first two examples are taken into account are two-dimensional and the last one is three-dimensional.
The main idea for investigating the free vibration of tensegrity structures, which experience both the deformation mode and the infinitesimal mechanism, is that by modifying the design parameters, the eigenvalues of the system tend to the desired values, set by designers. The design parameters are acceptable provided that they satisfy the constraints mentioned in Section 2. Otherwise, it may be concluded that the set of target eigenvalues are not physically logical and have to be modified. It may be noted that in order to obtain a unique solution, the number of the design parameters should be equal to the number of target eigenvalues. Therefore, here, the number of the design parameters as well as the number of target eigenvalues is set equal to three. In all the numerical examples conducted in the present work, the design parameters are the section area of the cable Ac, the section area of the strut As and the pre-tension F. The pre-tension force vector


3.1. Snelson’s X tensegrity
The initial topology of the square Snelson’s X tensegrity structure consists of four cables and two struts as shown in Figure 2. As mentioned above, in order to design tensegrity structures, both their static and dynamic behavior should be analyzed.
The Snelson's X tensegrity structure.
Desired and updated eigenvalues.
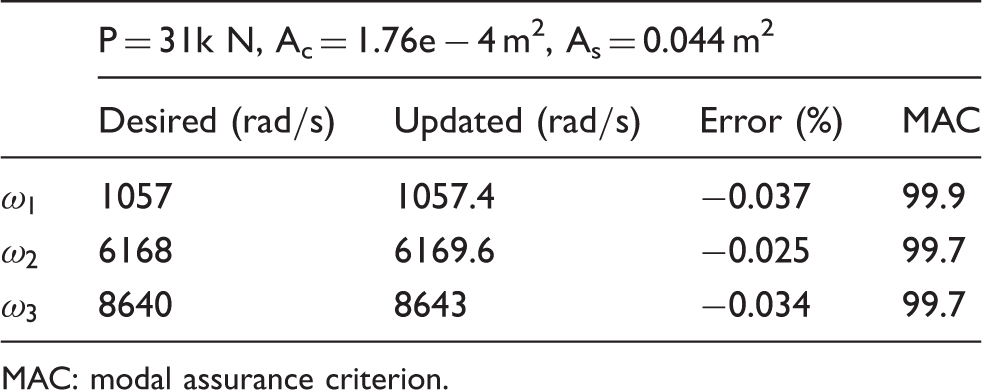
MAC: modal assurance criterion.
The cables and struts are considered to be made of steel with Young modules E = 210 GPa and ultimate strength 400 MPa and the density of member The error convergence vs. the number of iterations for Snelson's tensegrity structure.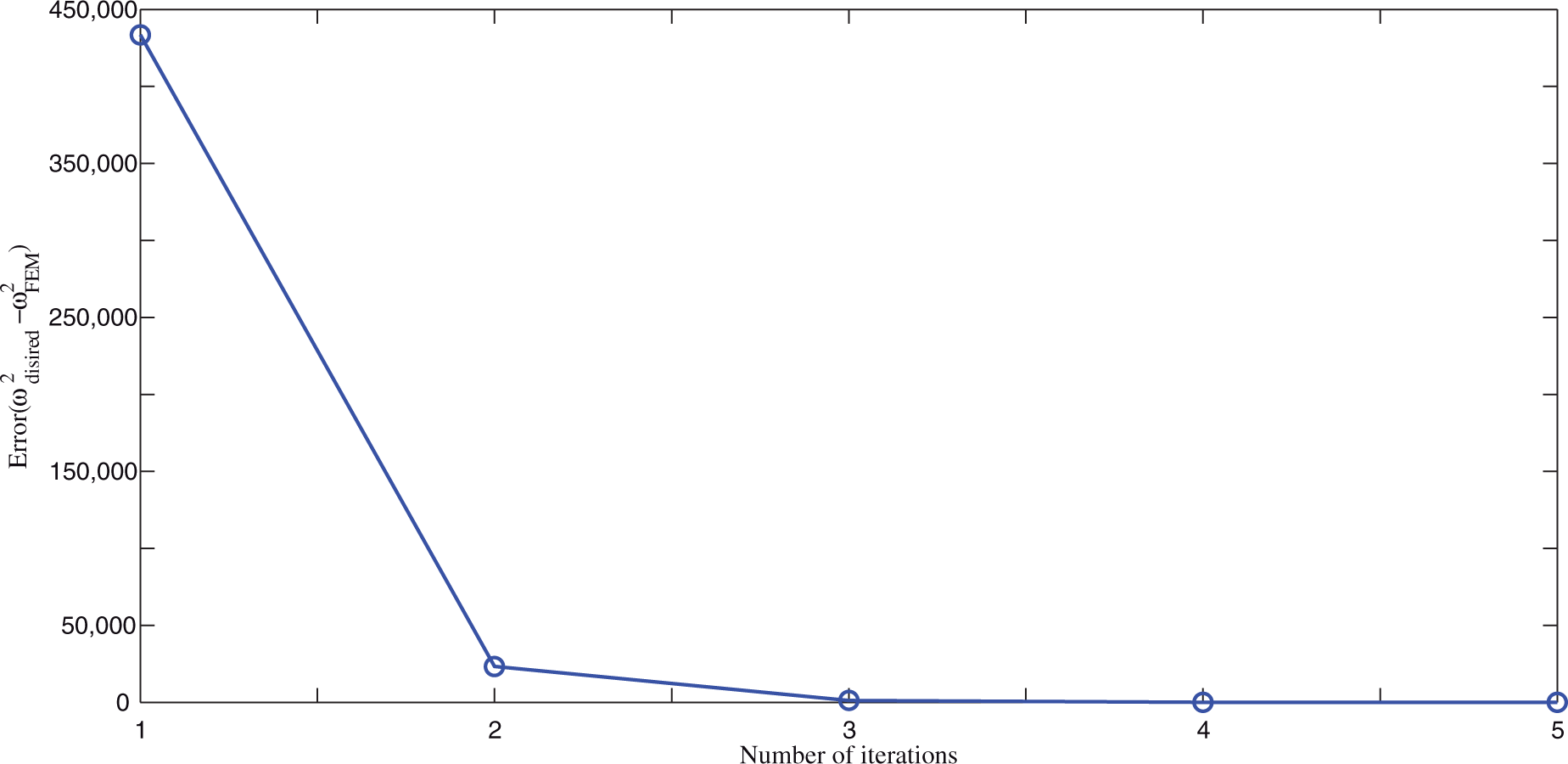
The updated eigenvalues of the tensegrity structure, their differences with the desired ones and also their value of MAC have been given in Table 1. The results shown in Table 1 clearly evidence that using the proposed algorithm the desired tensegrity structure can be achieved with acceptable accuracy. The eigenvectors associated with the three updated eigenvalues have been depicted in Figure 4(a) to (c).
(a). Mode shape of the first natural frequency of Snelson's X tensegrity, (b) mode shape of the second natural frequency of Snelson's X tensegrity and (c) mode shape of the third natural frequency of Snelson's X tensegrity.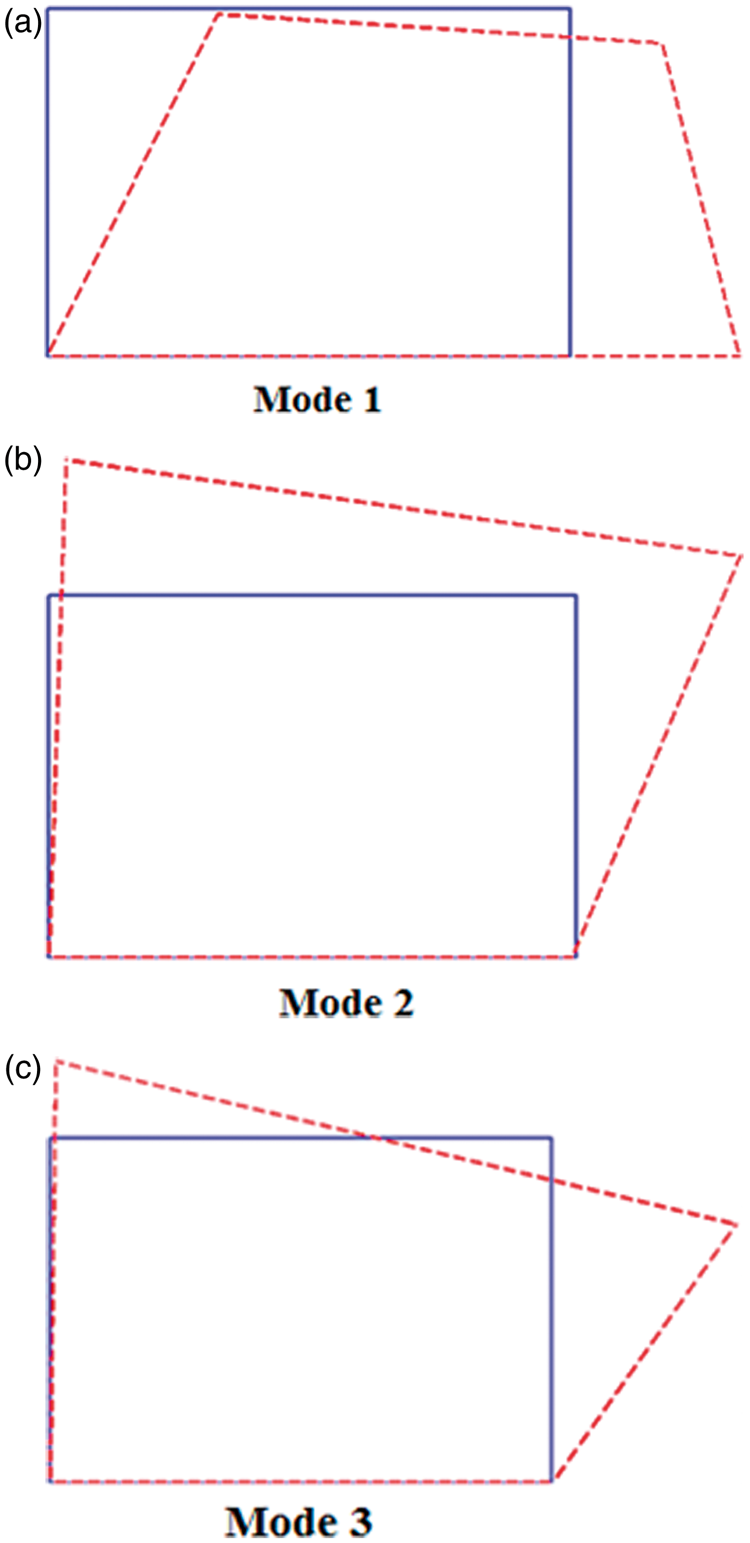
3.2. Three-module Snelson’s X tensegrity
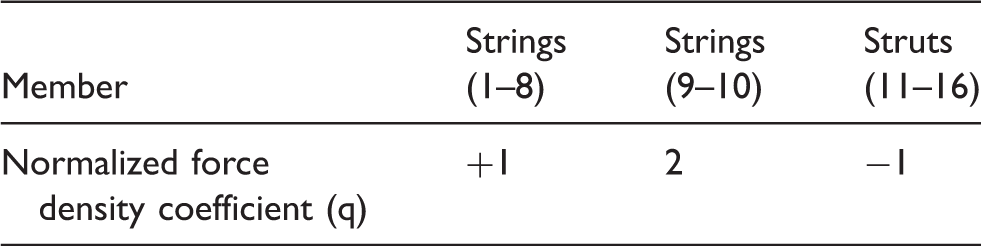
A three module tensegrity grid truss assembled from basic Snelson’s X is shown in Figure 5. It is composed of eight nodes, six struts and ten cables. Based on Tran and Lee (2010b), the form-finding procedure is carried out to find the feasible set nodal coordinates and the normalized force density coefficient which are given respectively in Figure 5 and Table 2.
Two dimensional three module Snelson's X tensegrity truss. The normalized force density coefficient of a three module Snelson’s X.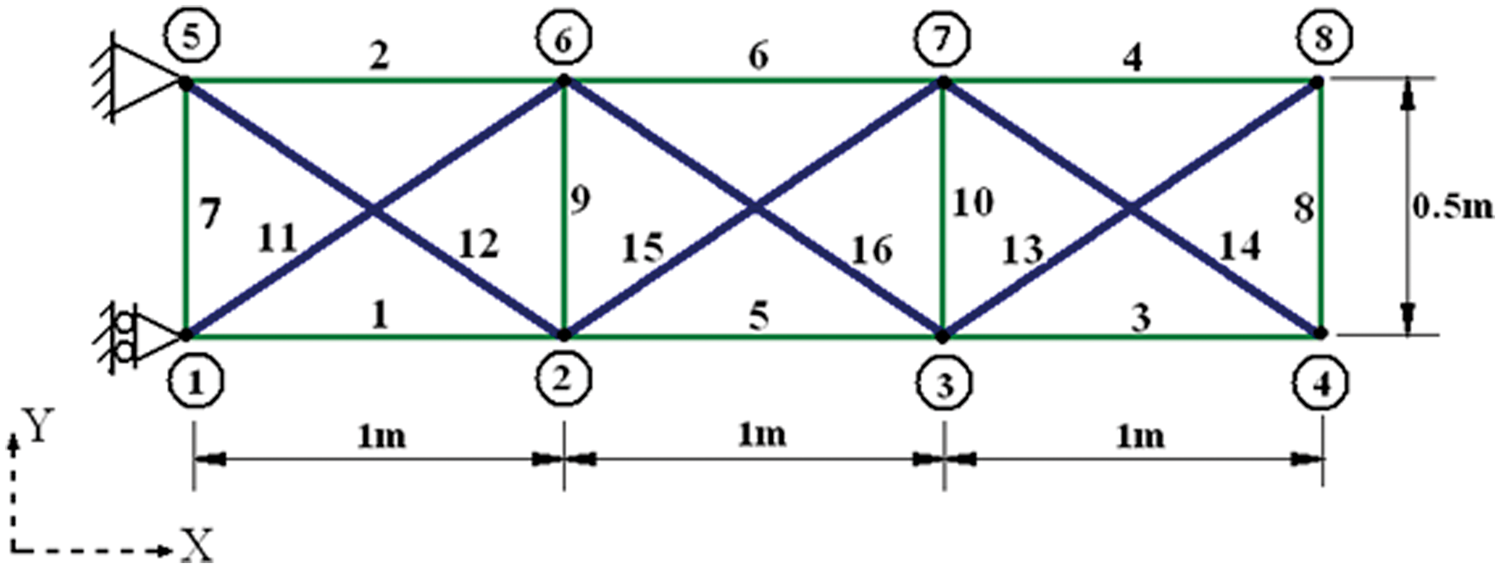
Desired and updated eigenvalues.
MAC: modal assurance criterion.
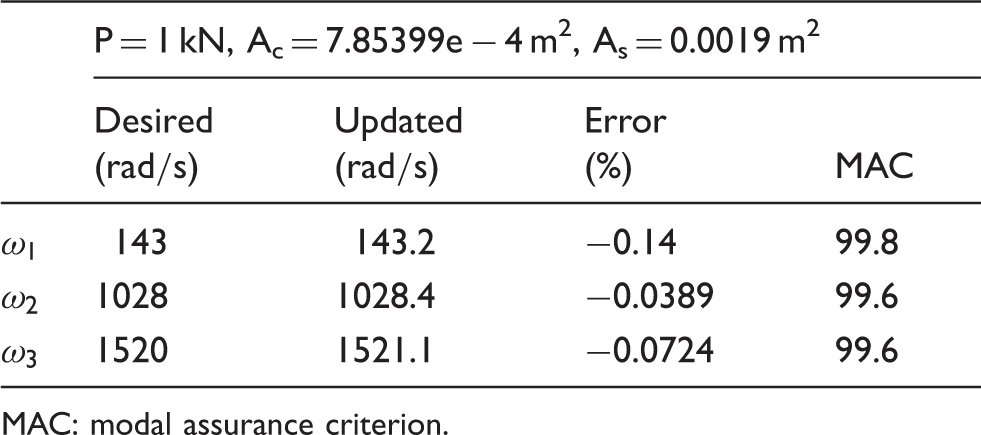
The material of the elements is taken to be the same as that considered in example 1. To obtain a unique result, as there are three target eigenvalues three design variables are considered, including the section areas of cable and strut, and the coefficient of pre-tension. In this example, the rough values of the design parameters are taken as P = 3 KN, Ac = 2.29e − 4 m2 and As = 0.01 m2. These values are then updated by minimizing the objective function (equation (12)) by employing equations (5) and (6). The same as example 1, the L-curve method is used to attain the optimal regularization parameter because its sensitivity matrix is ill-posed. The error convergence versus the number of iterations is shown in Figure 6 for the three module Snelson’s tensegrity structures.
The error convergence vs. the number of iterations for 2-D three module Snelson's tensegrity structure.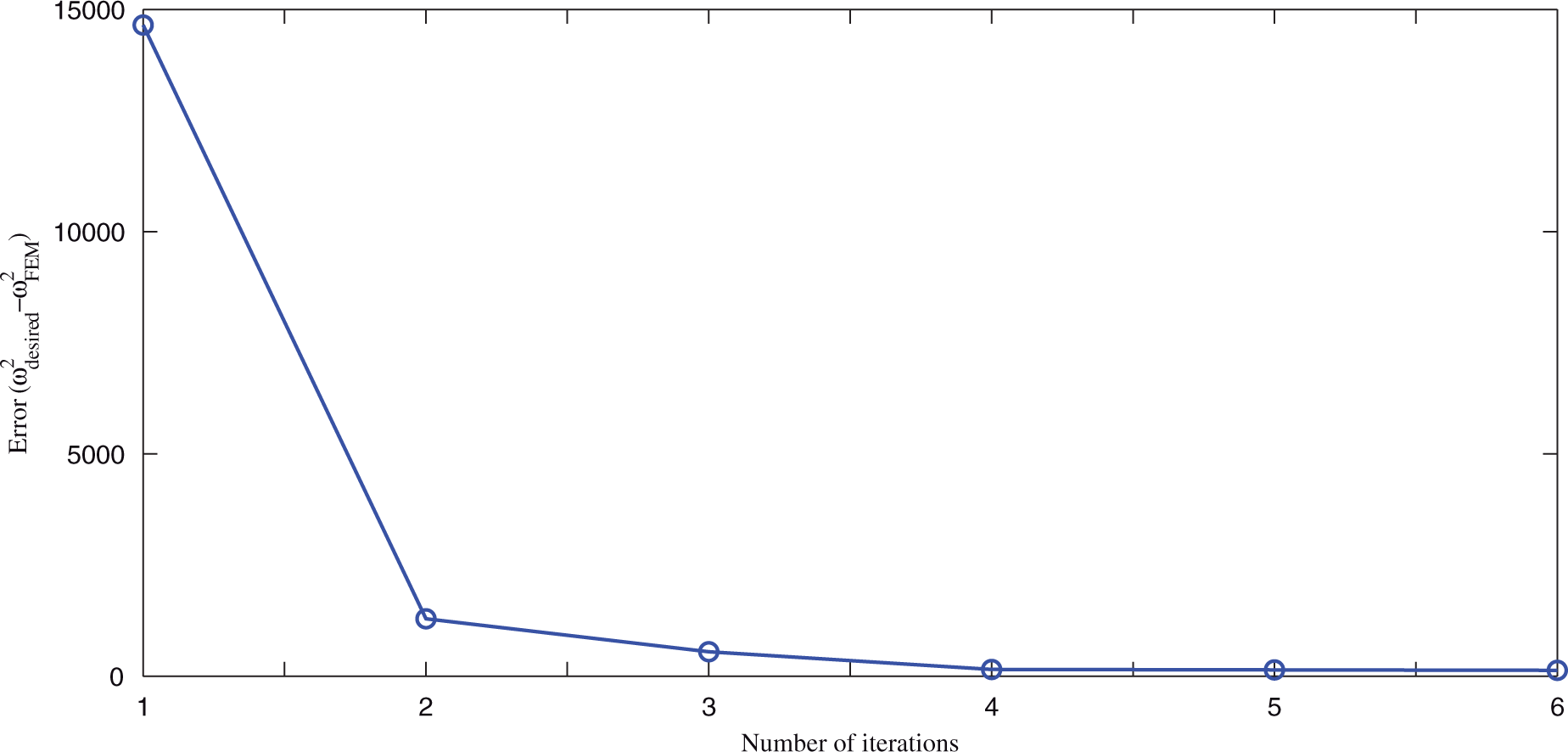
The optimized values are obtained as P = 1 kN, Ac = 7.85395–005 m2 and As = 0.002 m2 when equation (12) tends to zero. These values would satisfy all the constrained conditions mentioned in Section 2 and hence they can be regarded as acceptable values. Table 3 provides the updated eigenvalues of the tensegrity structure, their discrepancies with the desired ones and their value of MAC. The eigenvectors associated with the three updated eigenvalues are provided in Figures 7(a) to (c).The large (i.e., above 99%) values of the MAC indicate the superior agreement between the desired eigenvalues and those obtained from FEM analysis.
(a) Mode shape of first natural frequency of three module Snelson's tensegrity structure, (b) mode shape of second natural frequency of three module Snelson's tensegrity structure and (c) mode shape of third natural frequency of three module Snelson's tensegrity structure.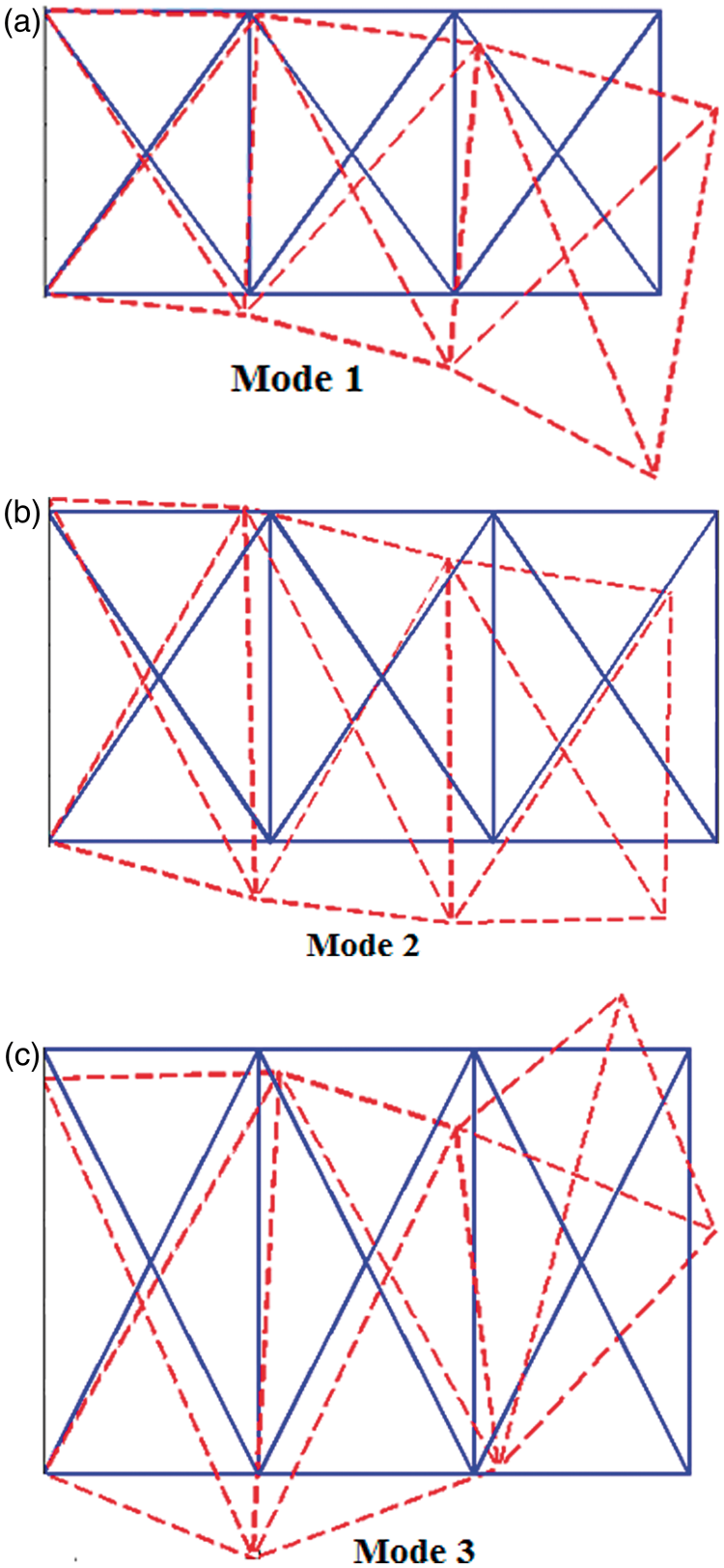
3.3. Three-dimension tensegrity structure
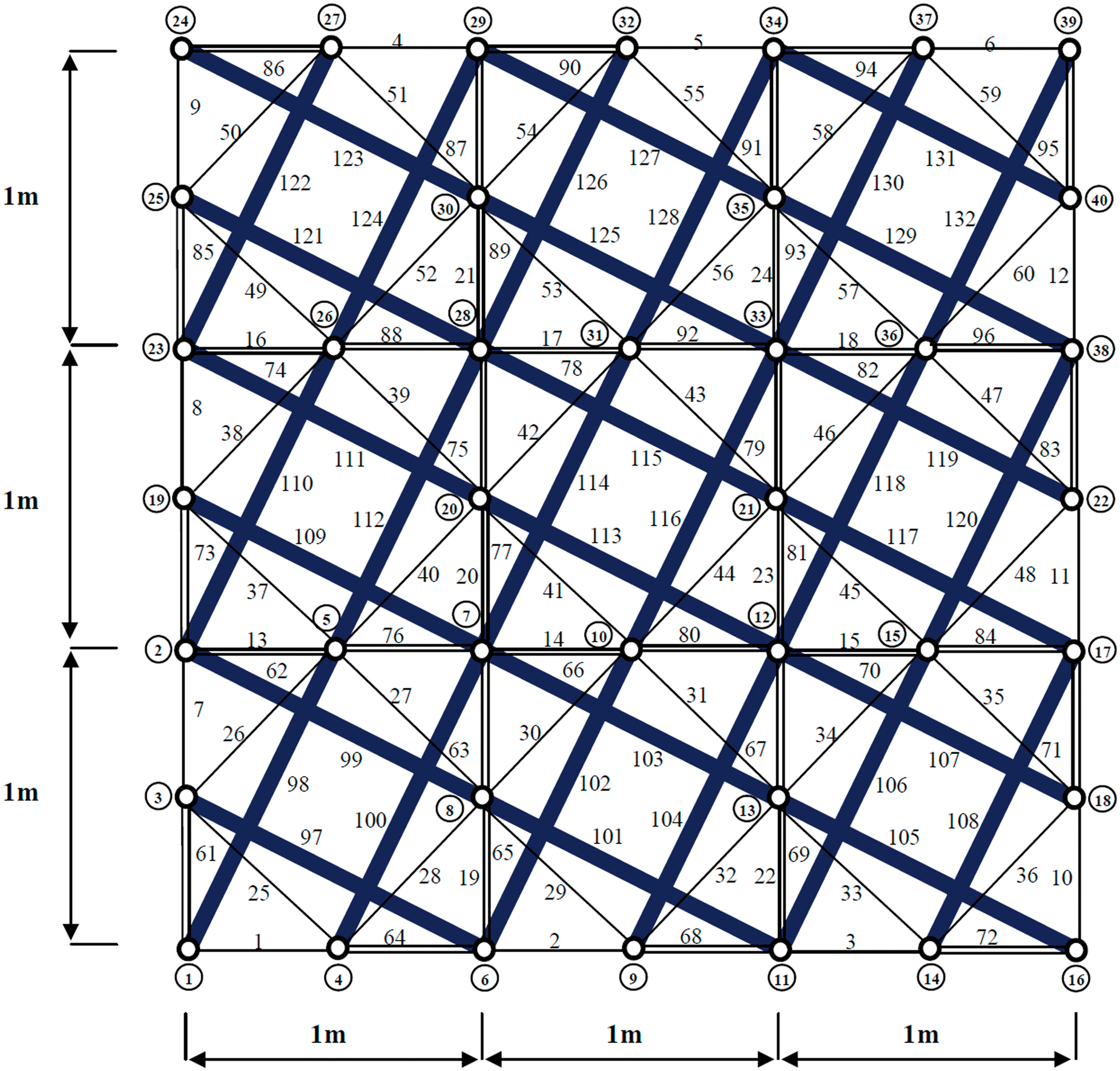
Consider a constrained-free double layer tensegrity grid, which is assembled from nine quadruplex units. The isometric and top views of the structure are shown in Figures 8 and 9 respectively. This structure consists of 40 nodes, 96 cables and 36 struts elements. The static and dynamic analysis of the system can assist to obtain a far more efficient structure. The form-finding procedure is performed based on the approach developed by Tran and Lee (2010a). The feasible set nodal coordinates are shown in Figures 8 and 9. Finally, the normalized force density coefficients are reported in Table 4.
A perspective of three-dimensional tensegrity grid formed of 9(3*3) quadruplex modules. A top view of three-dimensional quadruplex modules tensegrity. The normalized force density coefficient of a double layer tensegrity grid.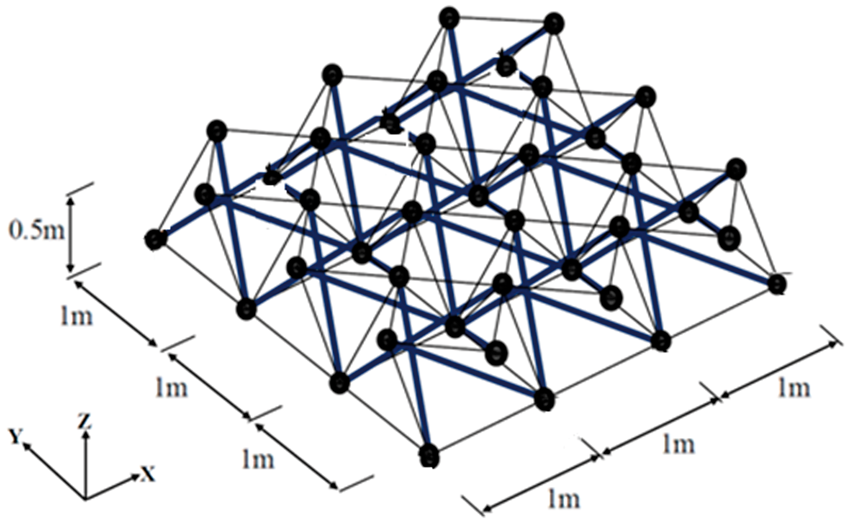
Desired and updated eigenvalues.
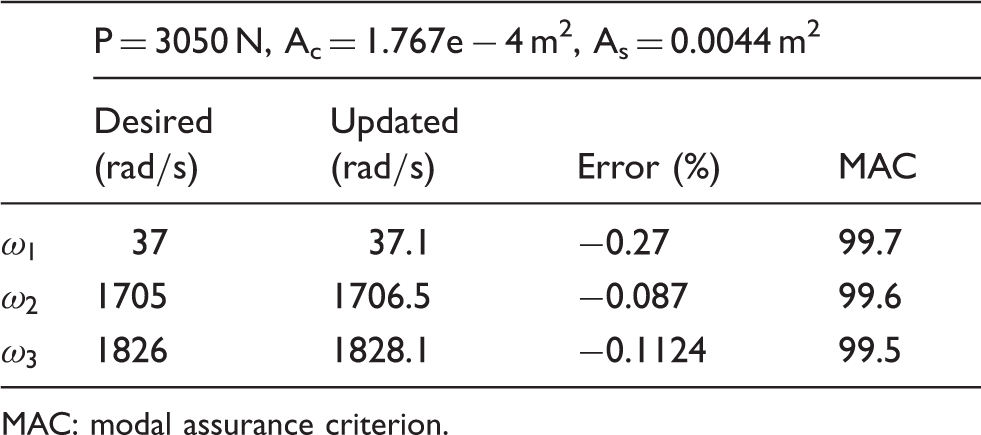
MAC: modal assurance criterion.
The cables and struts are assumed to be made of aluminium with Young modules E = 69 GPa, ultimate strength 310 MPa and the density of member The error convergence vs. the number of iterations for 3-D quadruplex modules tensegrity.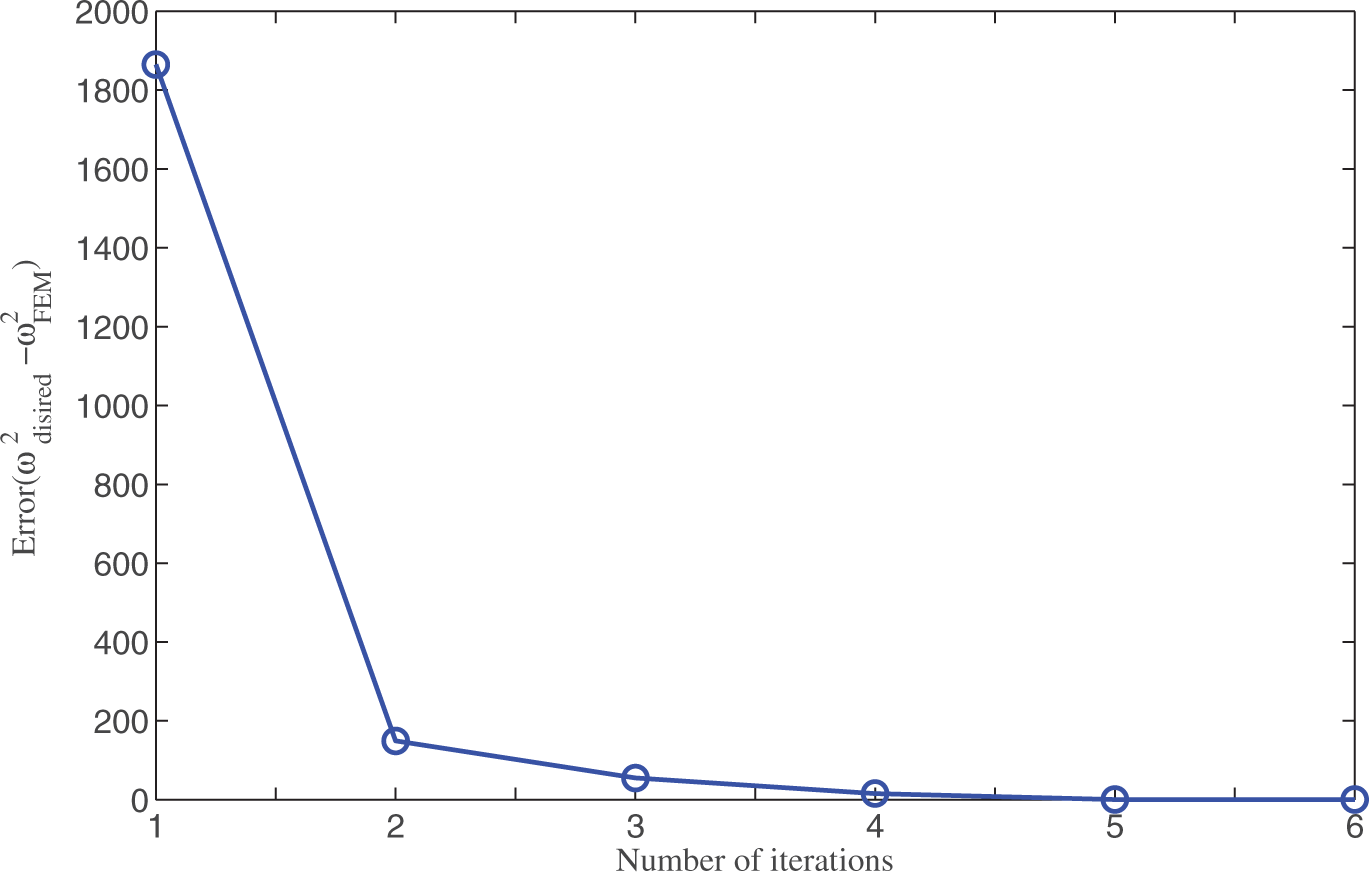
The optimized values for design parameters are obtained as P = 3050 N, Ac = 1.7670e − 4 m2 and As = 0.0044 m2. These updated values are acceptable because they satisfy well all the conditions given in Section 2. The updated eigenvalues of the present tensegrity structure, their differences with the desired ones as well as their value of MAC are provided in Table 5. The high values of the MAC confirm once again the good agreement between the desired and FEM-based model.
In order to realize the presence of an infinitesimal mechanism, the first three non-zero resonance eigenvalues of the FEM are calculated as a function of the pre-tension level in the tensegrity structure. The changes in the resonance eigenvalues in terms of the pre-tension level (up to the allowed value P = 3050) are depicted in Figure 11.
Variation of the first 3 natural frequencies with the level of pretension in the structure.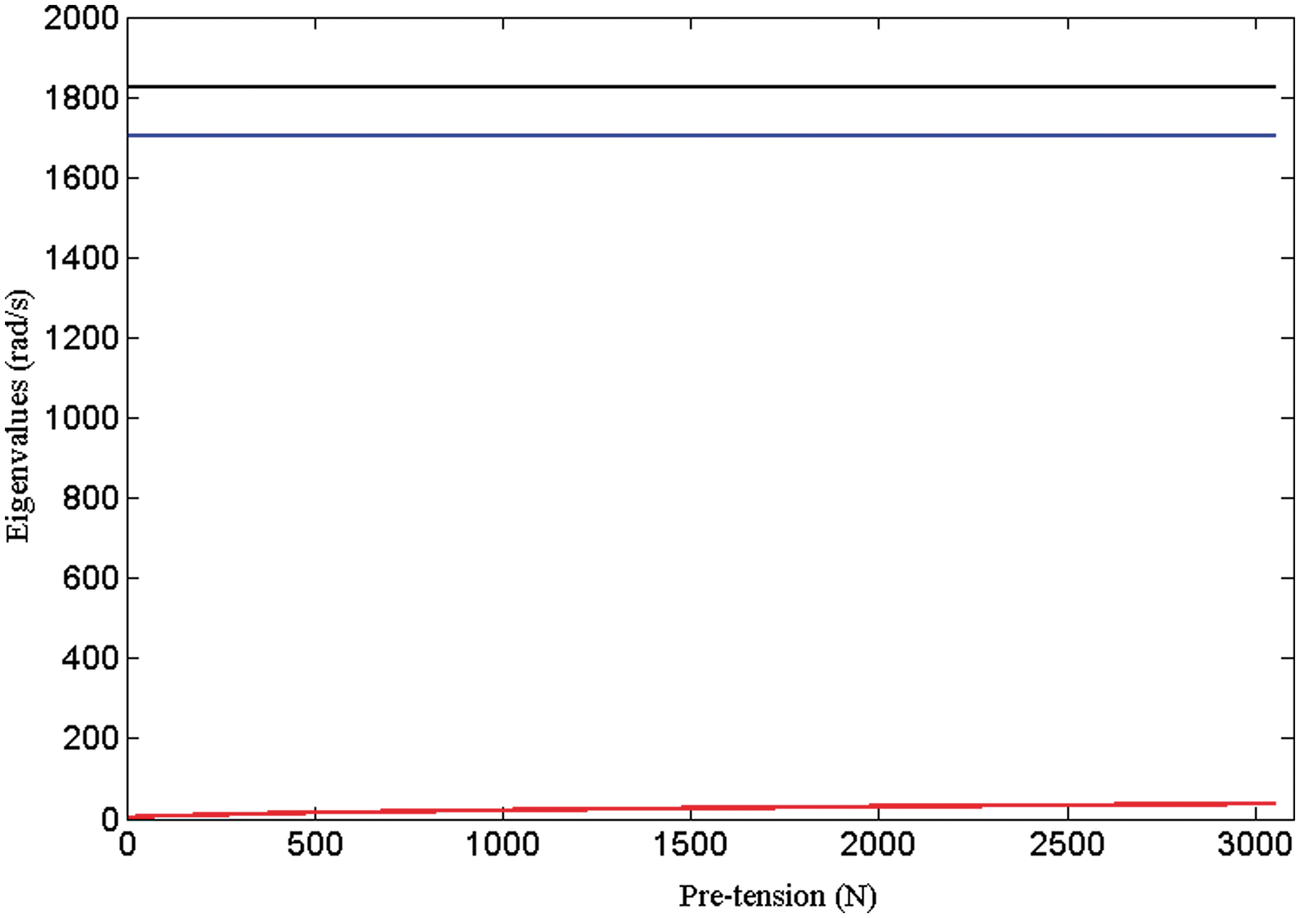
It can be seen that as the pre-tension tends to zero the first eigenvalue also approaches zero. In other words, this mode corresponds to the case with no deformation energy and is deemed to be the infinitesimal mechanism of the structure. Furthermore, as seen in Figure 11, the eigenvalue of infinitesimal mechanism mode is increased by the square root of pre-stress force amplitude. A similar trend has been exhibited in previous studies on the tensegrity dynamics (Murakami, 2001b). Consequently, the infinitesimal mechanisms can be stabilized by applying the pre-stress to the structure. It is worth mentioning that, one can identify the pre-stress in a structure by simply taking into account the vibrational properties of the structure in the design process. Here, for example, the eigenvector associated with the first updated eigenvalues is provided in Figure 12.
Mode shape of first natural frequency of double layer tensegrity grid.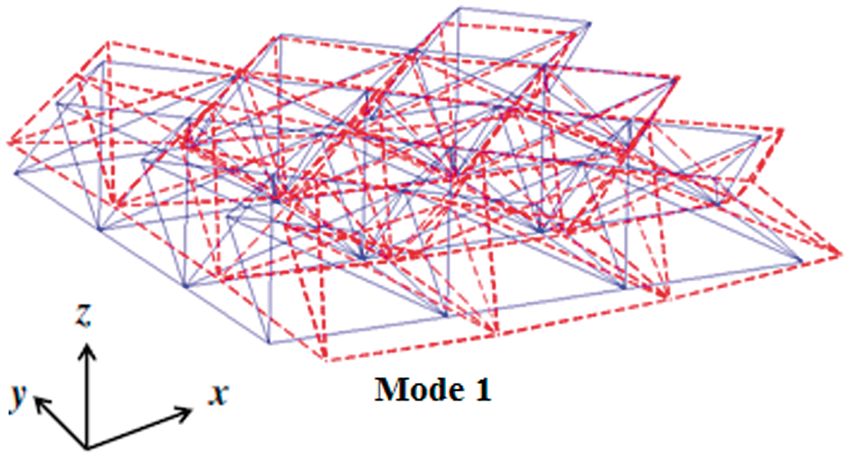
4. Conclusions
This paper aims to examine the influences of vibrational properties on the tensegrity structures design. Based on the eigenvalue sensitivity technique and model updating procedure an algorithm has been developed to design the tensegrity structures by including their dynamic behavior. Furthermore, the proposed algorithm covers the effects of both deformation modes and infinitesimal mechanisms on the dynamics properties. The proposed algorithm starts with given nodal coordinates as well as the normalized force density coefficients determined, based on the form-finding step. It then adjusts the values by minimization of the error between the desired eigenvalues and those obtained from an FEA. These errors can be due to, for instance, an inappropriate selection of the element material, area or coefficient of pre-stress forces. The discrepancies can be minimized by modifying the initial design variables using the proposed algorithm. The obtained design parameters are acceptable provided all tensegrity constraints are fulfilled. The efficiency and applicability of the algorithm in the tensegrity design is verified through three numerical examples. The results show that the optimum values of the design variables are accurately determined by employing the proposed algorithm for the desired tensegrity structure. Therefore, in order to design a far more efficient structure, the designers have to take into consideration the dynamic criteria in the design processes.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.