
Abstract
Using cross-ties is one of the effective countermeasures to suppress unfavorable bridge stay cable vibrations. It has been successfully applied in the field. However, dynamic behavior of cable networks is still not clearly understood, which hinders the development of a more efficient design. The current paper aims at extending the existing analytical studies on in-plane free vibration of cable networks by developing closed-form modal solutions for a wider series of cases, in particular for general cable networks consisting of n horizontally laid main cables interconnected transversely with a single line of rigid cross-ties. The validity of these analytical modal solutions is verified by independent finite element simulations. These closed-form modal solutions offer a clear elucidation of the mechanics underlying various modal behaviors observed in cable networks of different layout and structural properties. In addition, based on the proposed analytical formulation, the important system parameters of cable networks are identified. The unique features associated with cable networks of a number of specific configurations are investigated and discussed.
1. Introduction
One main achievement in the recent advancement in bridge engineering is the design of cable-stayed bridges with much longer span length due to the ambitions of humans to cross wider spaces and the rapid development of materials and technology. Lightweight structural components and the use of longer spans result in more slender elements and structures that are susceptible to vibrations under various types of dynamic excitations. A typical example is the cables on cable-stayed bridges. Mainly due to their high flexibility, light mass and very low inherent damping, when subjected to various environmental factors such as wind, stay cables are unable to dissipate much of the excitation energy and are thus vulnerable to dynamic excitations. In addition, the nonlinear interaction between the motions of the cable and bridge deck can also lead to very large amplitude cable vibrations (e.g. Lilien and Pinto da costa, 1994; Macdonald and Georgakis, 2002; Caetano and Cunha, 2003; Sun et al., 2003). These unfavorable cable motions would cause problems related to structural safety and user discomfort.
Different solutions have been used on site to suppress undesired cable vibrations. Surface treatment is applied to cables to change their aerodynamic features (Matsumoto et al., 1992; Zhan et al., 2008). Mechanical types of solutions, including installation of external dampers and connection of a few cables by cross-ties, have also been implemented on site with different levels of effectiveness. The structural behavior of a cable when attached transversely with an external damper and the optimum design of such a cable-damper system have been extensively studied by many researchers (e.g. Pacheco et al., 1993; Krenk, 2000; Tabatabai and Mehrabi, 2000; Main and Jones, 2002; Fujino and Hoang, 2008; Cheng et al., 2010). However, the mechanism of the cross-tie solution is not yet well understood. When cross-ties are applied on site, the cables that are vulnerable to (or have experienced) large amplitude vibrations are connected to their neighboring cables through transverse secondary cables or cross-ties to form a cable network. Such a strategy aims at reducing the effective length of the problematic cable to increase its in-plane stiffness and thus natural frequency. Besides, the adoption of cross-ties may add extra damping to the target cable, which would also help to suppress vibrations. The cable sag variation among cables of different lengths is found to be reduced with the introduction of cross-ties as well (Gimsing and Georgakis, 1993).
So far, cross-ties have been successfully used on a number of cable-stayed bridges to control cable vibrations (e.g. Virlogeux, 1998; Caracoglia and Jones, 2005b; Kumarasena et al., 2007). After installing the cross-ties, no problematic cable vibrations have been reported. However, studies on the dynamic behavior of this type of cable network system are still limited.
Ehsan and Scanlan (1989) used the finite element approach for the solution of a three-dimensional cable network problem and studied the redistribution of oscillation energy in a cable network consisting of a number of stay cables connected by cross-ties. According to their study, the main function of the cross-ties in a cable network is to help transfer energy from a problematic cable to its neighbors.
Virlogeux (1998) described the unexpected behavior of cross-ties on the Normandie Bridge in France where one of the cross-ties was broken. It was not clear what caused the failure of this cross-tie. However, when these cross-ties were replaced by stronger ones with higher tension, the performance was found to be satisfactory. In another case reported by the same author, the installation of extremely low damping cross-ties was found to successfully suppress the rain–wind-induced vibrations of bridge stay cables.
Yamaguchi and Nagahawatta (1995) performed a set of physical tests on a simple cable network, of which two main cables of different lengths were connected through two transverse cross-ties symmetrically. It was found that the fundamental frequency of the cable network was higher than that of the top individual main cable (the longer one) and increased monotonically with the prestress in the cross-tie. The modal damping of the cable network was always greater than that of a single main cable without cross-tie. This modal damping increment was found to be more significant when more flexible (soft) cross-ties were used.
Caracoglia and Jones (2005a) developed an analytical procedure to study the in-plane free vibration of a cable network. In the formulation, the taut cable assumption was applied to the main cables and the cross-tie was simplified as either a rigid rod or a linear spring. Closed-form modal solutions were obtained for a few simple two-cable networks (Caracoglia and Jones, 2005a), whereas when extending to a more complicated cable network on a real cable-stayed bridge (Caracoglia and Jones, 2005b), the analytical approach was implemented numerically. In a more recent work (Caracoglia and Zuo, 2009), this analytical procedure was applied to cable networks of different configurations to determine the effectiveness of the cross-tie solution. It is worth noting that cable networks on real bridges generally consist of more than two stay cables. Numerically simulating its dynamic behavior would not allow a clear identification of important system parameters. In addition, the high cost associated with reconstruction of numerical model would limit the capability of the approach for an extensive parametric study.
Bosch and Park (2005) simulated the performance of a group of stay cables connected by cross-ties using the finite element software SAP 2000. Interestingly, it was found that the effectiveness of the cross-ties depended on their deployment geometry, the quantity, the size, and the anchorage conditions with the main cables. It was observed from the numerical simulation that when cables were connected by transverse cross-ties, vibration modes densely populated over a narrow band of frequency range would be induced. In addition, it was found that the combined use of cross-ties and external dampers would not necessarily produce the sum of the benefits when they are used separately.
In an experimental study by Sun et al. (2007), a scaled cable network model of three main cables connected by a transverse cross-tie was tested. The effects of different factors, such as the cross-tie stiffness, the tensioning method, and the pretension of the cross-ties, were evaluated. It was found that while the stiff type of cross-tie mainly contributed to enhance the in-plane stiffness of a cable network and thus its modal frequencies, the soft type of cross-tie is more effective in increasing the system damping.
A simplified analytical model was proposed recently by Zhou et al. (2011) to study the free vibration of a cable network. Only the target cable was included in the model, and the effects of cross-ties were modeled as linear springs.
In the majority of previous studies, either physical tests or numerical simulations were conducted to explore the dynamic behavior of a cable network. To the knowledge of the authors, very few studies (e.g. Caracoglia and Jones, 2005a, 2005b; Zhou et al., 2011) have attempted analytical evaluation. In the case of Caracoglia and Jones (2005a, 2005b), the proposed analytical procedure was implemented numerically for a more complex network containing more than two stay cables. Thus, the key system parameters as well as their contributions to the performance of a cable network could not be clearly explained. Nevertheless, this information will be essential to the design of such a vibration control strategy. Viewing the needs, effort has been made by the authors to further extend the existing analytical work by investigating a wider series of cases, exploring the role of different system parameters on the dynamic behavior of cable networks (Ahmad and Cheng, 2013a), and examining the impact of cross-tie flexibility on the in-plane modal response of cable networks (Ahmad and Cheng, 2013b).
In the present paper, an analytical model of a general cable network consisting of n horizontally laid main cables interconnected by a single line of transverse rigid cross-ties with straight alignment will be developed. The system characteristic equation of a basic cable network model with two horizontal cables connected through a transverse rigid cross-tie will be derived first. It will then be extended to a four-cable network and lastly to a general one with n cables. The system equation of the general cable network will be solved analytically. The in-plane modal behavior of cable networks with different configurations will be examined using the developed analytical model and approach. The unique features associated with cable networks of various types of layout and structural properties will be extensively examined.
2. In-plane free vibration of a basic cable network
2.1. Description of the system
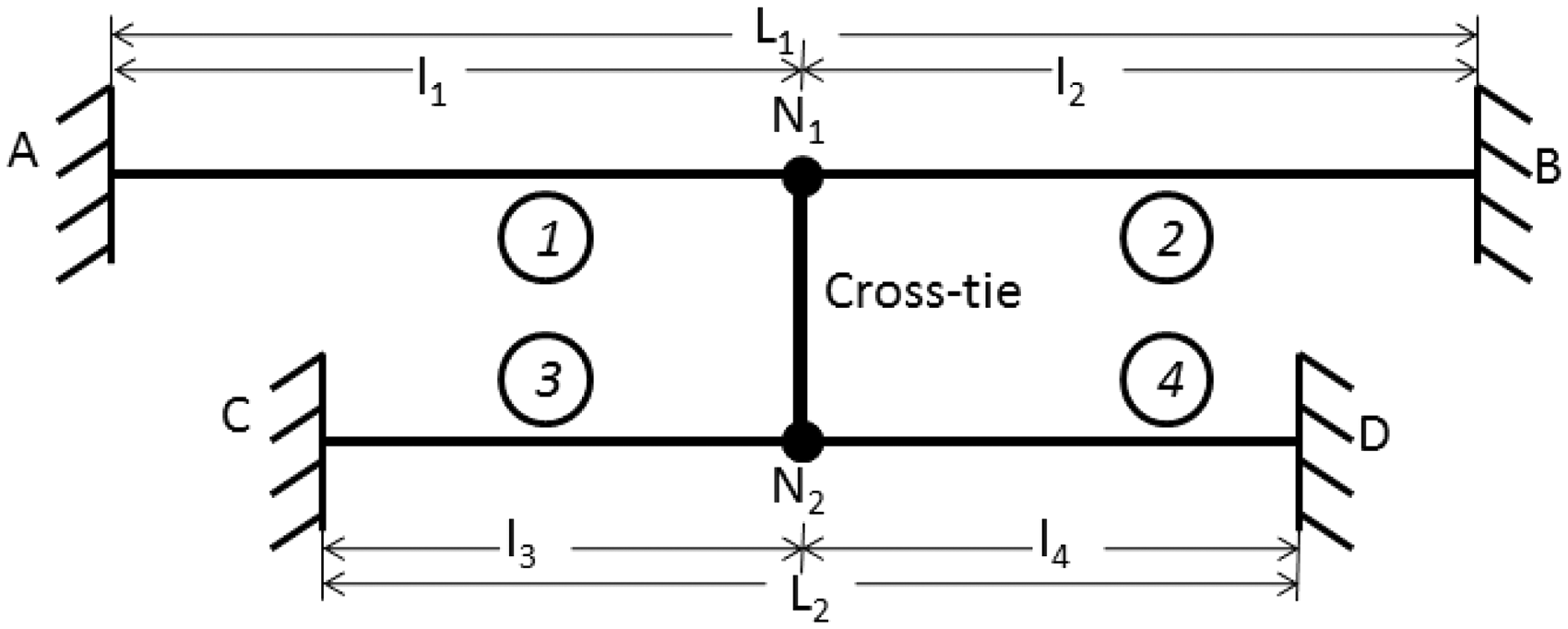
The proposed mathematical model of a basic cable network comprised two horizontally laid main cables having different lengths L1 and L2, with L1 ≥ L2. The longer cable, main cable 1, is assumed as the target cable, the vibration of which needs to be controlled. The shorter cable, main cable 2, is referred to as the neighboring cable or the colleague cable in the subsequent discussion. Both cables are connected through a vertical rigid cross-tie of length Lc, which divides each cable into two segments, as shown in Figure 1(a). The mass per unit length of the two cables is m1 and m2, respectively, and the prestressing force is H1 and H2, respectively. The unit mass of the cross-tie is mc. The horizontal offset of the second cable on the left end is denoted by OL and that on the right by OR (OL ≠ OR in general). The cross-tie is located at l1 from the left end of cable AB (l1 < L2). The downward vertical displacements of the main cables and the cross-tie are defined as positive.
Schematic diagram of the mathematical model of a basic cable network: (a) entire cable network; (b) free body diagram of the isolated cross-tie.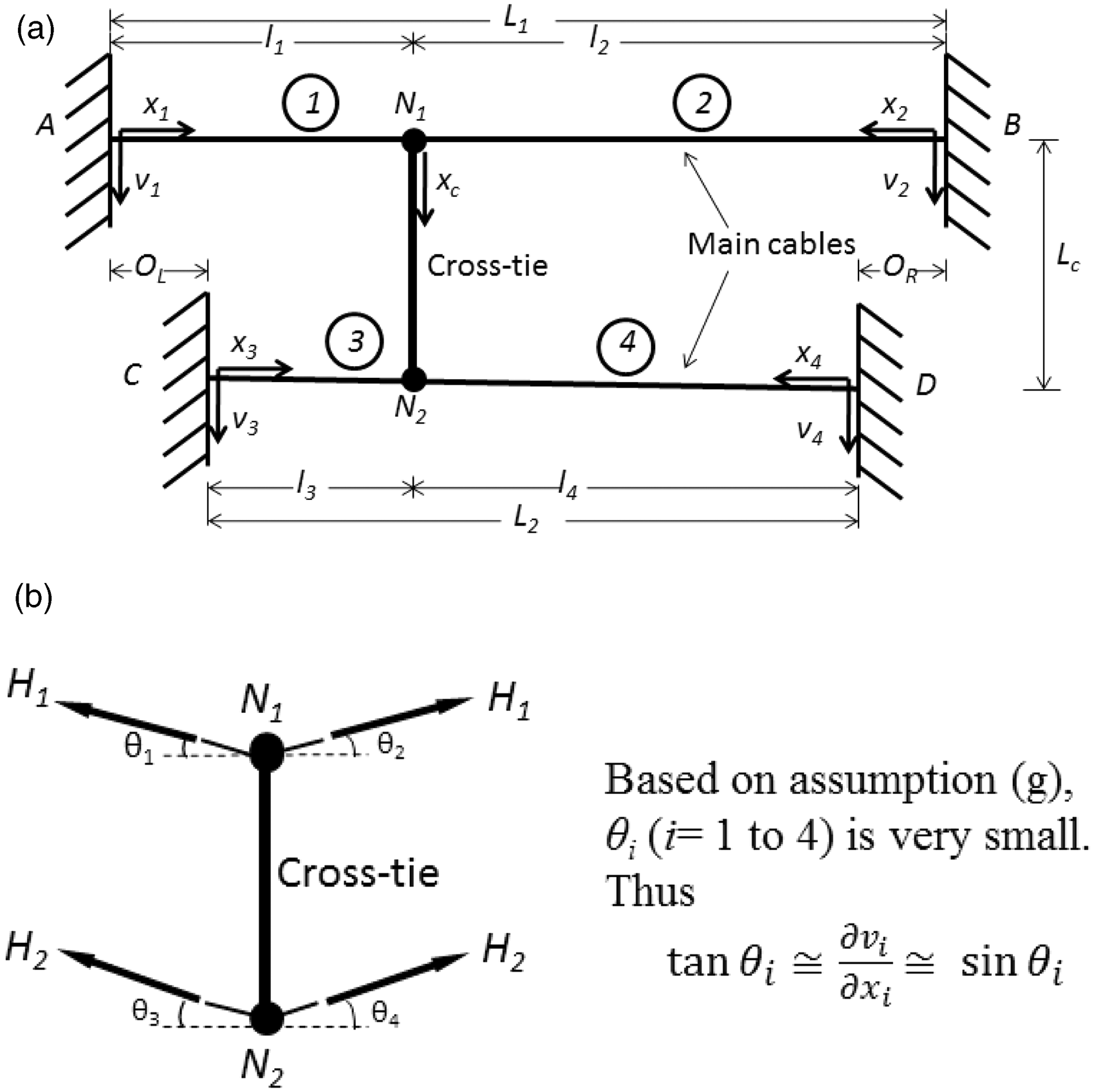
The analytical model of a basic cable network is developed based on the following assumptions: (a) the main cables are idealized as taut cables; (b) the additional dynamic tensions in the main cables are neglected; (c) the main cables are fixed at both ends; (d) the main cables have the in-plane transverse vibration as their dominant motion, while the longitudinal vibration is neglected; (e) the cross-tie is rigid; (f) the motion of the cross-tie is dominated by longitudinal vibration, while the transverse motion is neglected; (g) the vibration amplitude is small and thus the cables behave linearly.
2.2. In-plane free vibration of a single taut cable
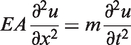
As can be seen from Figure 1(a), when the cable network vibrates in the vertical direction, the two main cables are expected to oscillate transversely, and that of the cross-tie along its axial direction. Therefore, the equation of motion describing the in-plane transverse vibration and axial vibration of a single taut cable will be briefly reviewed first.
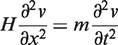
Since the additional cable tension due to its motion is neglected, the in-plane free vibration of a single taut cable in the transverse direction can be expressed as (Irvine and Caughey, 1974)




Since the cable is suspended horizontally and fixed at both ends,





2.3. Formulation of the system equation
In the basic cable network model shown in Figure 1(a), there are four main cable segments vibrating in the transverse direction and one cross-tie in the axial direction. Equations (5) and (7) can thus be applied to describe their motions. By introducing the frequency ratio parameters







As shown in Figure 1(b), by isolating the cross-tie N1N2 from the network, forces acting on it should satisfy

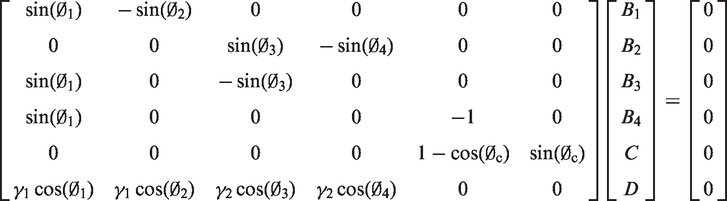
where
This leads to


3. In-plane free vibration of a general cable network
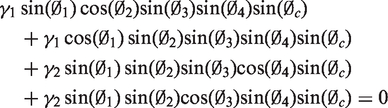
Before formulating the system equation of a general cable network, an extended cable network with four horizontally laid main cables will be studied first. As portrayed in Figure 2 (set n = 4 in the figure), this extended model comprises of four main cables of different lengths, with L1 being the length of the longest cable, main cable 1 (target cable), in the network. To control vibrations of the target cable, it is connected to three other neighboring cables through a single line of transverse rigid cross-ties of lengths Lc,i (i = 1, 2, 3), which divide each main cable into two segments. They are labeled as shown in Figure 2. Assume the mass per unit length of cable i is mi and the prestressing force is Hi (i = 1–4). The position of the cross-tie is l1 from the left support of main cable 1. By applying the same assumptions and procedures described in Section 2 for a basic cable network, the characteristic equation of an extended cable network can be derived. The following boundary, compatibility, and equilibrium conditions are applied to this extended cable network model in the derivation.
Schematic diagram of the mathematical model of a general cable network.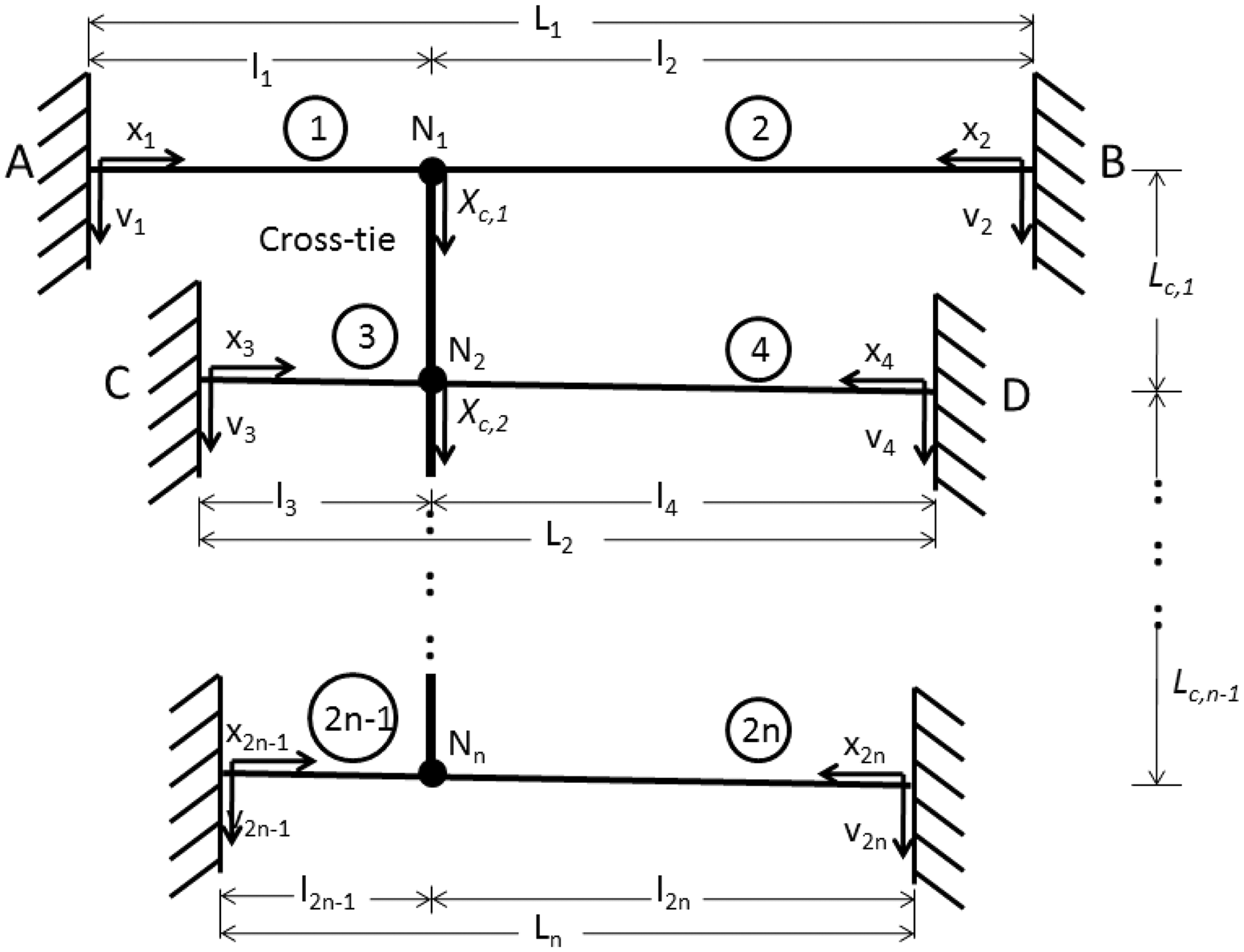




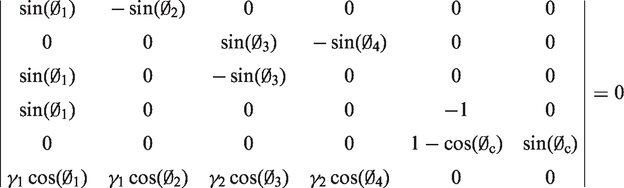
As a result, the system characteristic equation of an extended cable network is derived to be
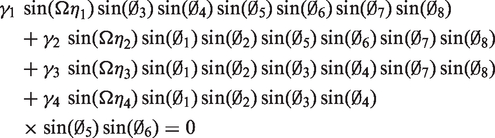
As can be seen from Equation (14), there are four main terms and each corresponds to one main cable in the network. Every term is the product of the mass-tension ratio parameter of one main cable, the combined Sine term of that main cable, and the Sine terms of both segments of the remaining three main cables. It shows the same pattern as Equation (12), which is the system characteristic equation of a basic cable network. Based on this observation, the characteristic equation of a more general cable network consisting of n (n = 2, 3, 4, … , N) horizontally laid main cables and a single line of rigid cross-ties, as shown in Figure 2, can be expressed as

From the above system characteristic equation and also noticing the definition of
4. Finite element model
To verify the proposed analytical model for the in-plane free vibration of a general cable network, a finite element model is developed independently. The commercial finite element software package ABAQUS 6.9 is used for this purpose. This software is capable of numerically simulating the performance of structural members in static, free vibration, and linear and nonlinear dynamic analysis.
In the developed model, all main cables and cross-ties are modeled as two-dimensional elements with two degrees-of-freedom along the transverse and axial directions at each node. The beam element B21 from the ABAQUS element library is chosen to model the main cable. This element is a shear-deformable (Timoshenko) beam and can be used for thin or thick members. The rigid beam element RB2D2 is selected to simulate the behavior of the rigid cross-ties. All the cables used in the numerical examples of the current study have lengths varying between 48 and 100 m. From the sensitivity analysis, it is concluded that 50–100 elements per cable, depending on the cable length, is adequate to model the cable behavior.
In order to ensure the accuracy of the results, the material properties of the numerical model must be defined to be compatible with the assumptions made for the analytical model. In the analytical model, the main cables are idealized as taut strings. Therefore, the material properties of the main cables in the finite element model are selected in such a way that would yield the Irvin’s inextensibility parameter close to 0. This parameter was introduced by Irvine and Caughey (1974) to describe the static and dynamic behavior of cables. It accounts for the geometric and elastic effects and is defined as λ2 = (mgL/H)2L/[HLe/(EA)], where Le is the effective length of the cable due to the sagging effect. The value of λ2 varies from a very small number (close to 0), for the taut flat cable, to a very large number (for example, 1000) in the case of an inextensible cable. The cross-ties are idealized as rigid connectors in the analytical model. Therefore, it is taken as the rigid body in the finite element model. The main cables are fixed at both ends and the initial stress is introduced to the B21 elements to simulate the effect of pretension. All boundary conditions are defined when building the finite element model, and the initial stress in the B21 elements is applied as the initial condition.
For free vibration analysis, the FREQUENCY procedure in the ABAQUS software is adopted, which uses an eigenvalue technique to extract natural frequencies and the corresponding mode shapes of a structure. LANCZOS is used as the Eigen solver. In the output, the eigenvectors are normalized such that the largest displacement value in each vector is unity.
5. Applications to cable networks with different configurations
In this section, the proposed analytical model of a general cable network will be applied to a number of cable network systems having different configurations and structural properties to demonstrate its flexibility. Results will be compared with those obtained from numerical simulations using the finite element model described in Section 4. The unique modal behavior associated with different types of cable network will be discussed.
5.1. Twin-cable network
5.1.1. Cross-tie at arbitrary location
In this type of cable network configuration, the two main cables are twins, that is, Schematic diagram of a symmetric twin-cable network with rigid cross-tie at an arbitrary point.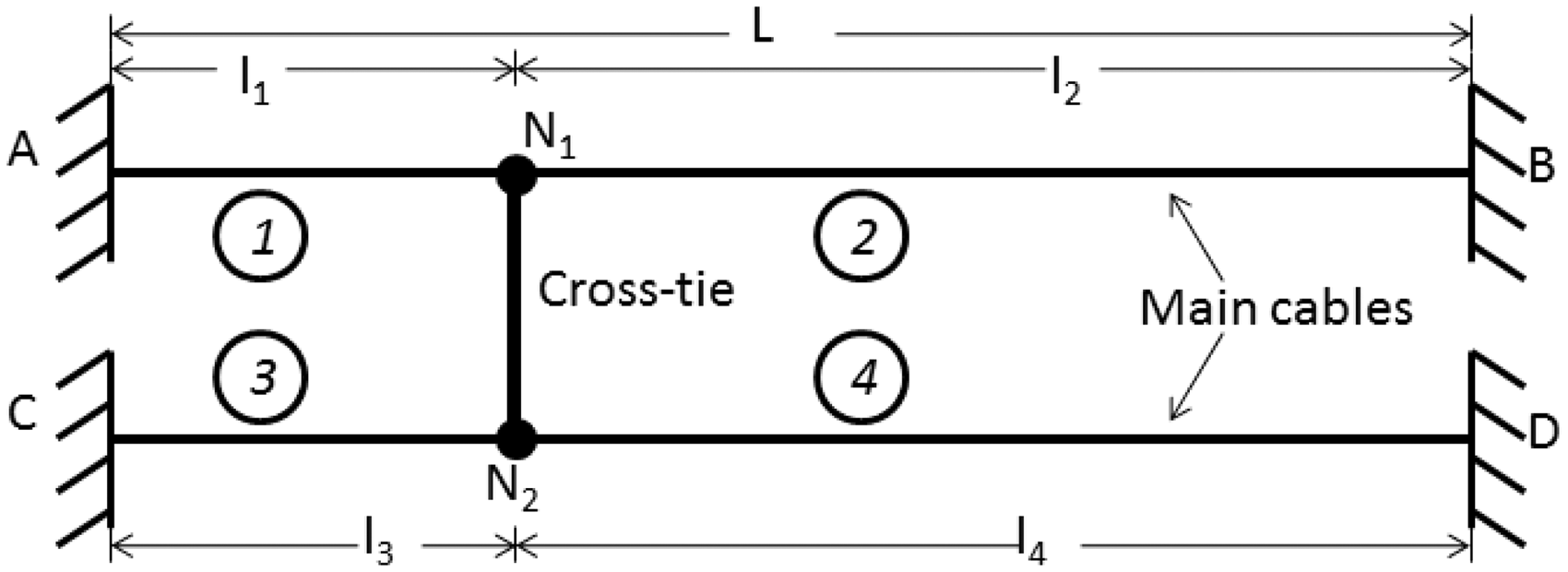
The second and the third sets of solution are functions of the segment ratio


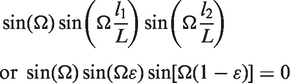
The impact of the cross-tie position, that is, the segment ratio Nondimensional modified frequency, 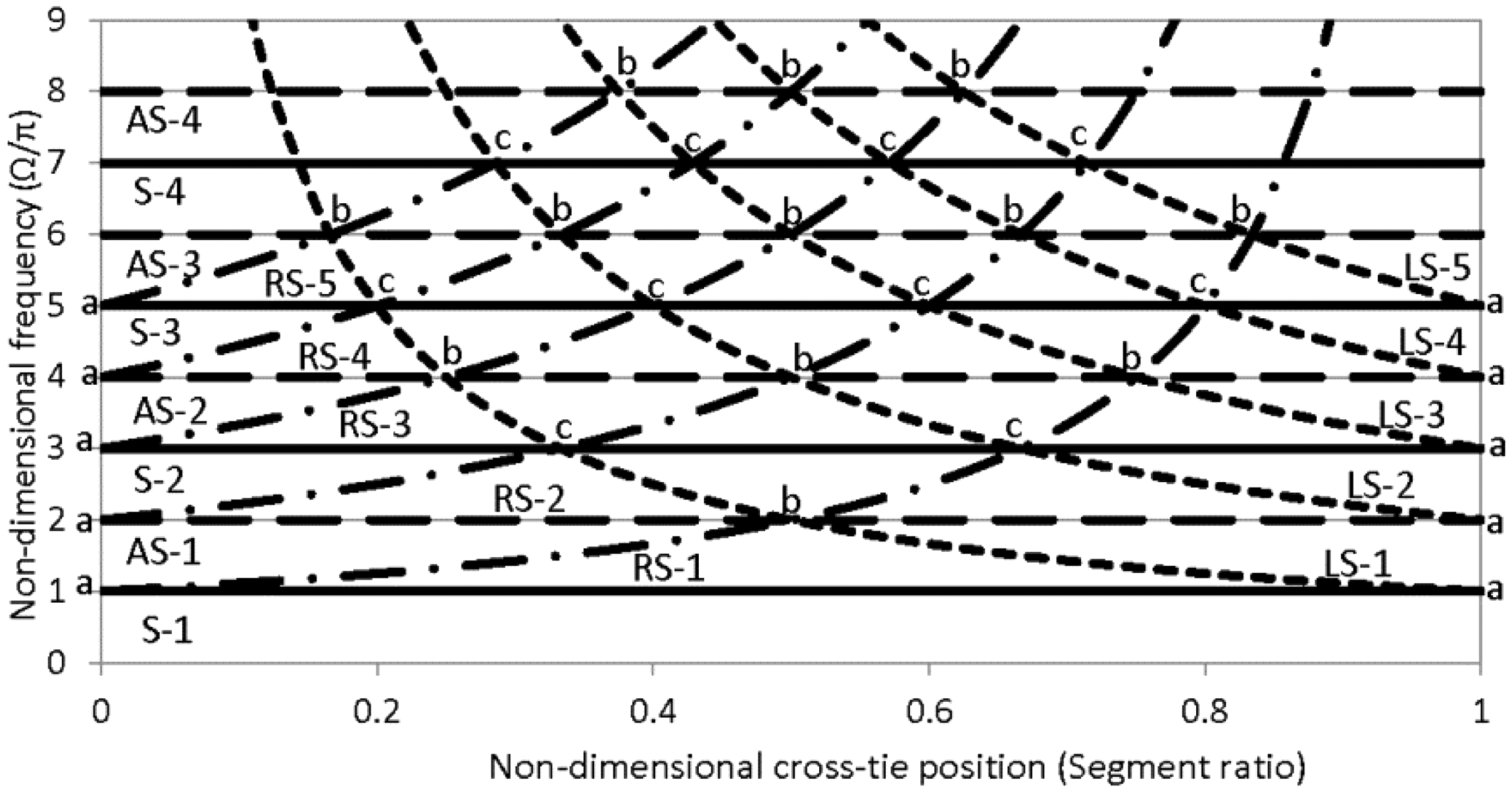
The first type of intersection, symbolized by ‘a’, represents the extreme cases of cross-tie location either at the left (
The second type of intersection, denoted by ‘b’, represents the coexistence of a pair of complimentary local RS mode and LS mode, along with an asymmetric global mode. The corresponding cross-tie position can be found by equating the frequency of the asymmetric global mode with one of the local modes in the complimentary pair. Using the case of the second asymmetric global mode as an example, its frequency remains as a constant when
The third type of intersection is symbolized by ‘c’; it is associated with the coexistence of a complimentary pair of local RS and LS modes and a symmetric global mode. The cross-tie location where these three modes coexist can be determined similarly by equating the frequency of the symmetric global mode with one of the local modes in the complimentary pair. For example, for the two intersection points ‘c’ on the horizontal solid line of Ω = 3π, the corresponding cross-tie positions are
It is interesting to note that the cross-tie position corresponding to the second and the third types of intersections happens to be the common node shared by the mode shapes of all the coexisted modes. In addition, results in Figure 4 clearly indicate that because of the modal property tri-furcation at the intersection points ‘b’ and ‘c’, the modal behavior of such a twin-cable network is very sensitive in the vicinity of these intersections. A minor shift of the cross-tie position could lead to a drastic switch between a local mode and a global mode, or a local LS mode and its complimentary RS mode. An earlier study by Caracoglia and Jones (2005a) also reported the coexistence of a pair of local modes and a global mode at some specific cross-tie locations. However, the intersection points were classified into two different types based on whether or not the cross-tie is located at cable mid-span.
5.1.2. Special case 1: cross-tie at mid-span
For a special case of cross-tie locates at the mid-span, all four main cable segments have the same segment ratio of

Among the three sets of solution to Equation (18), the one that describes the global modes, which yielded from
The mode shapes, that is, the vectors of the normalized modal amplitudes, can be determined by substituting the frequency values into Equation (10). The odd values of n generate symmetric global modes, that is, [1 1 1 1]T, while the even values of n generate three different possible vectors of normalized modal amplitudes as explained above, that is:
[1 −1 1 −1]T: anti-symmetric global modes with in-phase motion of both cables; [0 −1 0 1]T: local RS modes with out-of-phase motion of right cable segments; [1 0 −1 0]T: local LS modes with out-of-phase motion of left cable segments.
The left half of Figure 5 presents the first four modes of this type of basic cable network, the mode shape of which are defined by the above four normalized modal amplitude vectors.
Typical modes of a symmetric twin-cable system with rigid cross-tie at mid-span and quarter span (GM: global mode; LM: local mode; Sym.: symmetric; Asym.: anti-symmetric; RS: right segment; LS: left segment).
5.1.3. Special case 2: cross-tie at quarter span
Similarly, when the cross-tie locates at the quarter span from the left support, Equation (12) becomes

5.1.4. Numerical examples
In-plane modal properties of twin-cable networks with a rigid cross-tie at mid-span and quarter span.
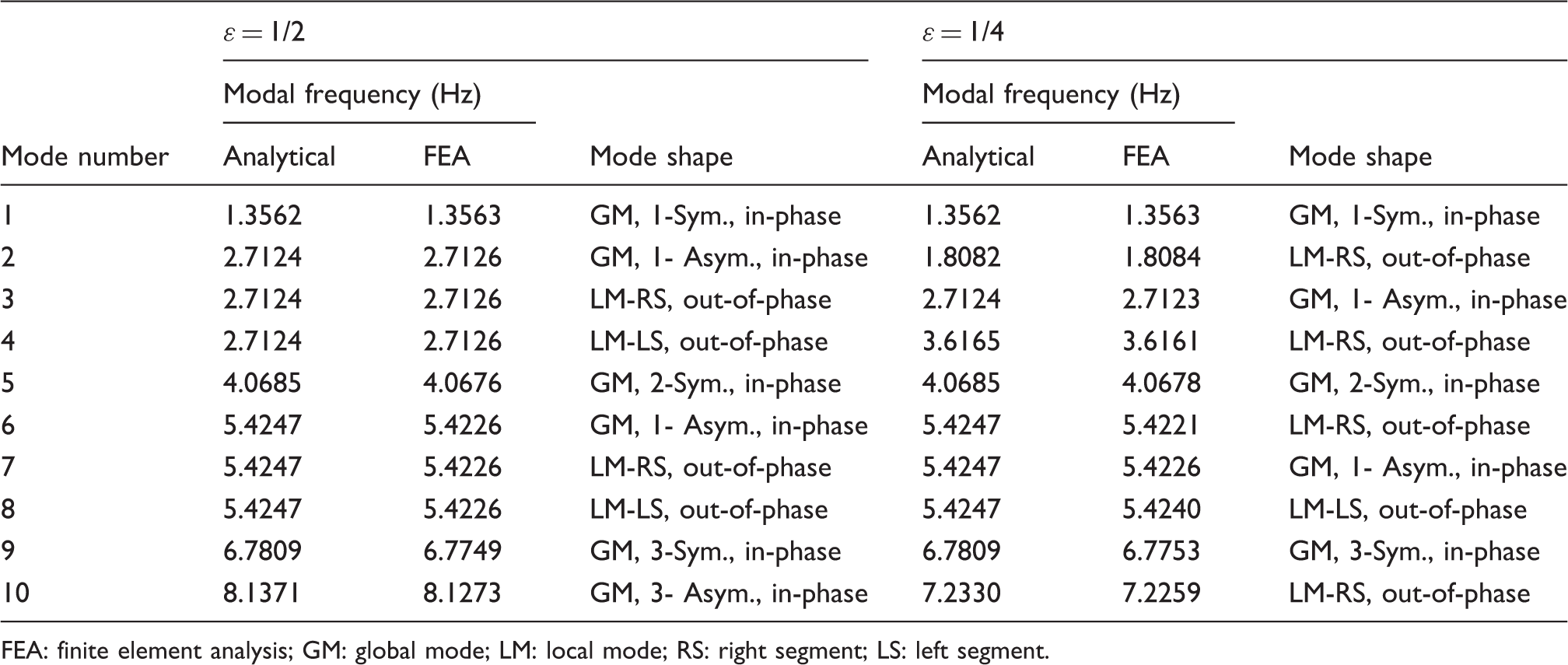
FEA: finite element analysis; GM: global mode; LM: local mode; RS: right segment; LS: left segment.
5.2. Symmetric unequal length two-cable network with a rigid cross-tie at mid-span
5.2.1. Analytical solution
In a symmetric two-cable network, shown in Figure 6, the cross-tie locates at mid-span. Assume the two main cables have different lengths and mass-tension ratios. Thus, the frequency ratios are Symmetric same-mass-tension two-cable network with unequal length main cables and a rigid cross-tie at mid-span.
Three sets of solution are present for the above system characteristic equation, which can be derived from

As a special case, when the two main cables have the same mass-tension ratio, that is, Nondimensional modified frequency, Ω/

Equations (21b) and (21c) generate the local modes dominated by either the target cable (main cable 1) or the colleague cable (main cable 2), respectively. As can be seen from Equations (21b) and (21c), the local modes dominated by the longer main cable (the target cable) are the same as those of the anti-symmetric modes of a single main cable, while those dominated by the shorter main cable (the colleague cable) depend on its frequency ratio. A stiffer colleague cable would lead to higher frequencies of its dominated local modes and delay its modal order.
5.2.2. Numerical examples
Two numerical examples of the symmetric unequal length two-cable network are presented in this section. To investigate the impact of the colleague cable on the modal behavior of the entire network, the same target cable is used in both examples. The colleague cable in Example 1 is assumed to have the same mass-tension ratio as the target cable, whereas that in Example 2 takes a different value. Thus, the cable network in Example 1 is a SMT system, and the one in Example 2 is a DMT system. The properties of the cables in these two networks are as follows.
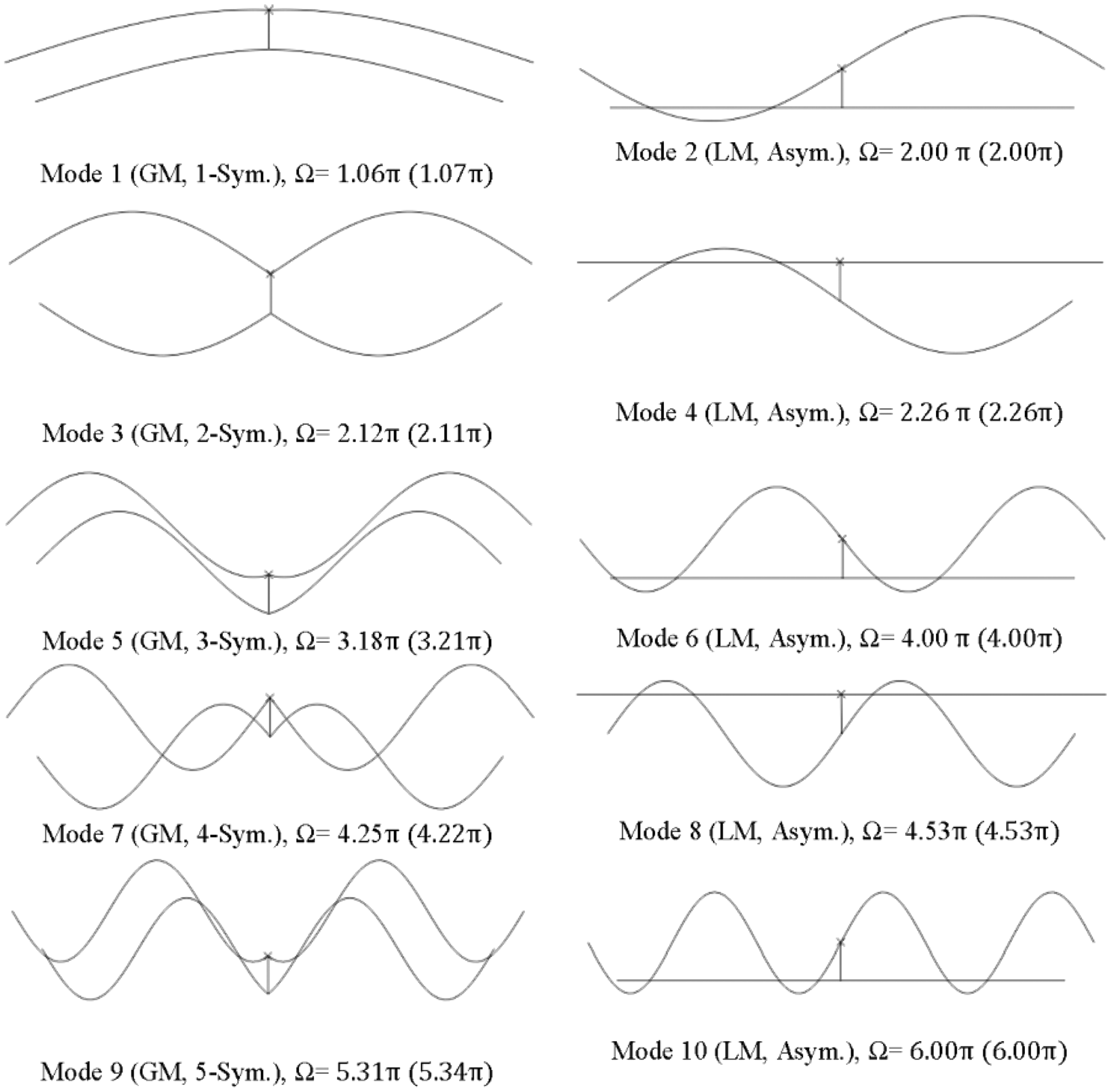
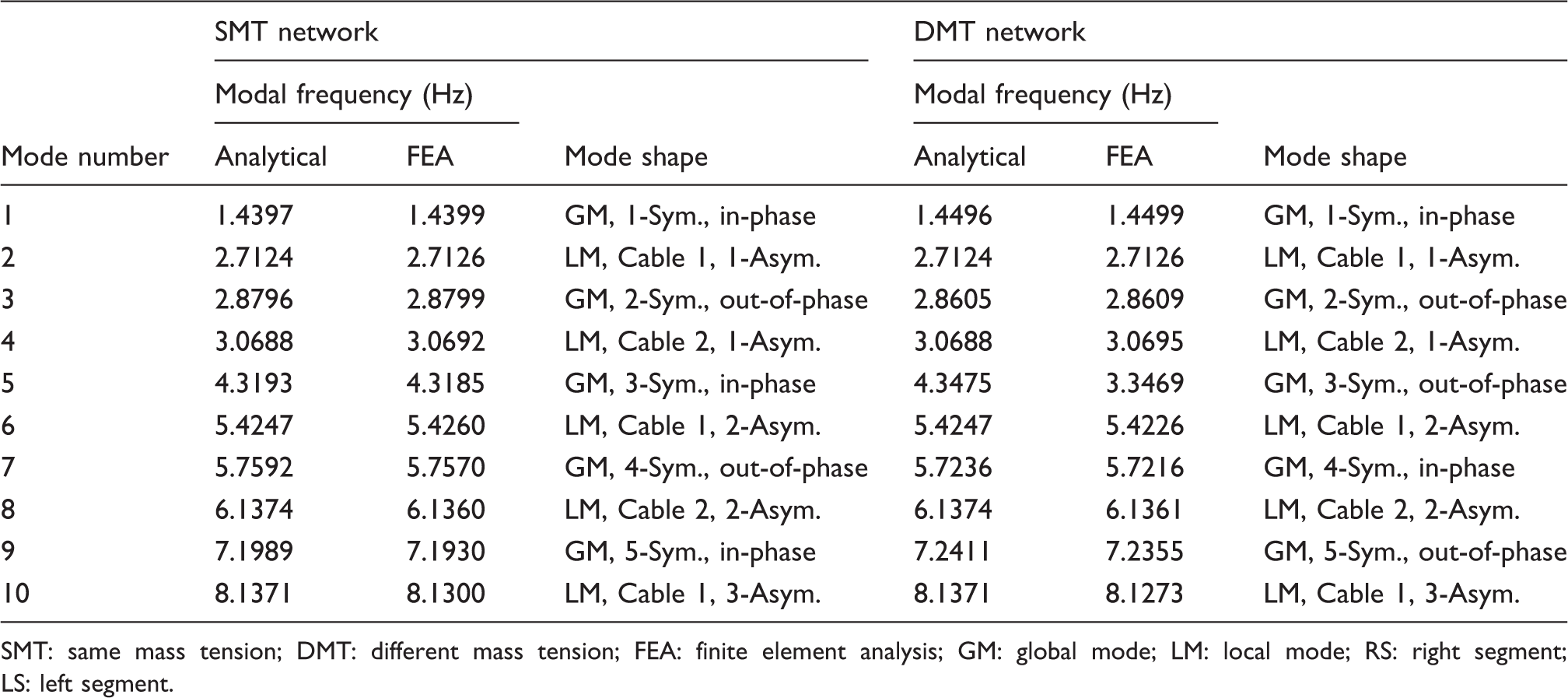
First 10 modes of a symmetric two-cable network with unequal length main cables and a rigid cross-tie at mid-span. (The abbreviated symbols used for describing the mode shapes are the same as those in Figure 5; in each mode, the modal frequencies corresponding to the same-mass-tension and the different-mass-tension networks are given outside and inside the brackets, respectively.) In-plane modal properties of symmetric unequal length two-cable networks with a rigid cross-tie at mid-span. SMT: same mass tension; DMT: different mass tension; FEA: finite element analysis; GM: global mode; LM: local mode; RS: right segment; LS: left segment.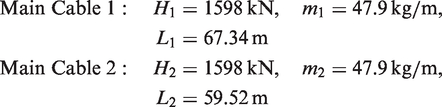
5.3. Symmetric four-cable network with a single line of rigid cross-ties at mid-span
In this cable network example, the four stay cables are selected in such a way that the mass-tension ratio parameters of all the main cables are the same. Therefore, it becomes a SMT cable network. These cables are connected through a single line of rigid cross-ties at mid-span. The main cables 2, 3 and 4 have the same frequency, but different from that of the target cable (main cable 1). Thus, the frequency ratios are 

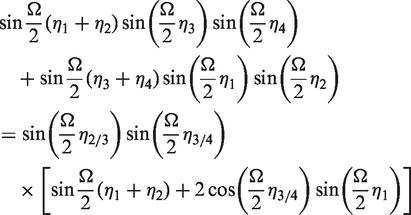


Equation (26g) generates the global modes. It has the form of summation of two terms. Noticing 
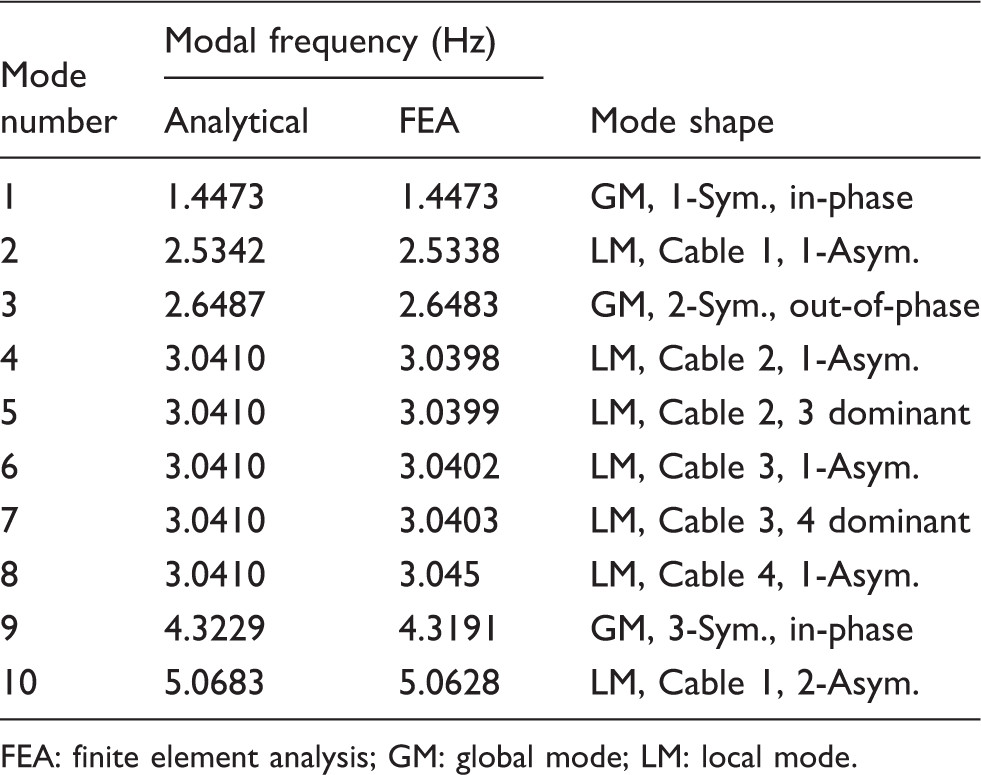
By assuming First 10 modes of a symmetric same-mass-tension four-cable network with system parameters as frequency ratio ηi = 0.833 (i = 2, 3, 4) and segment ratios ɛj = 1/2 (j = 1–8). (The abbreviated symbols used for describing the mode shapes are the same as those in Figure 5.) In-plane modal properties of a symmetric same-mass-tension four-cable network (ηi = 0.833, i = 2, 3, 4) with a single line of rigid cross-ties at mid-span (ɛj = 1/2, j = 1–8). FEA: finite element analysis; GM: global mode; LM: local mode.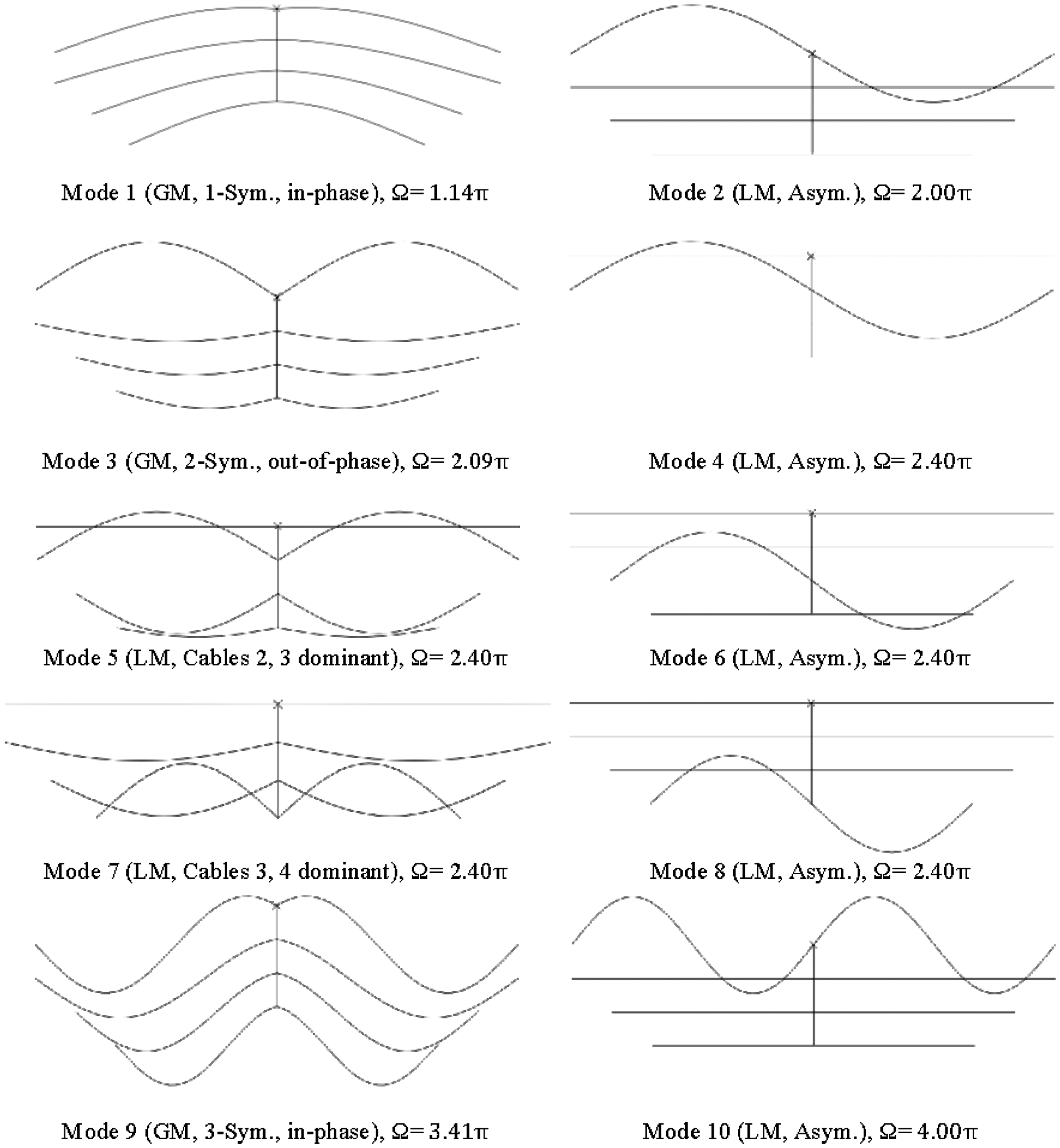
5.4. Asymmetric six-cable DMT network with a single line of rigid cross-ties at one-third span
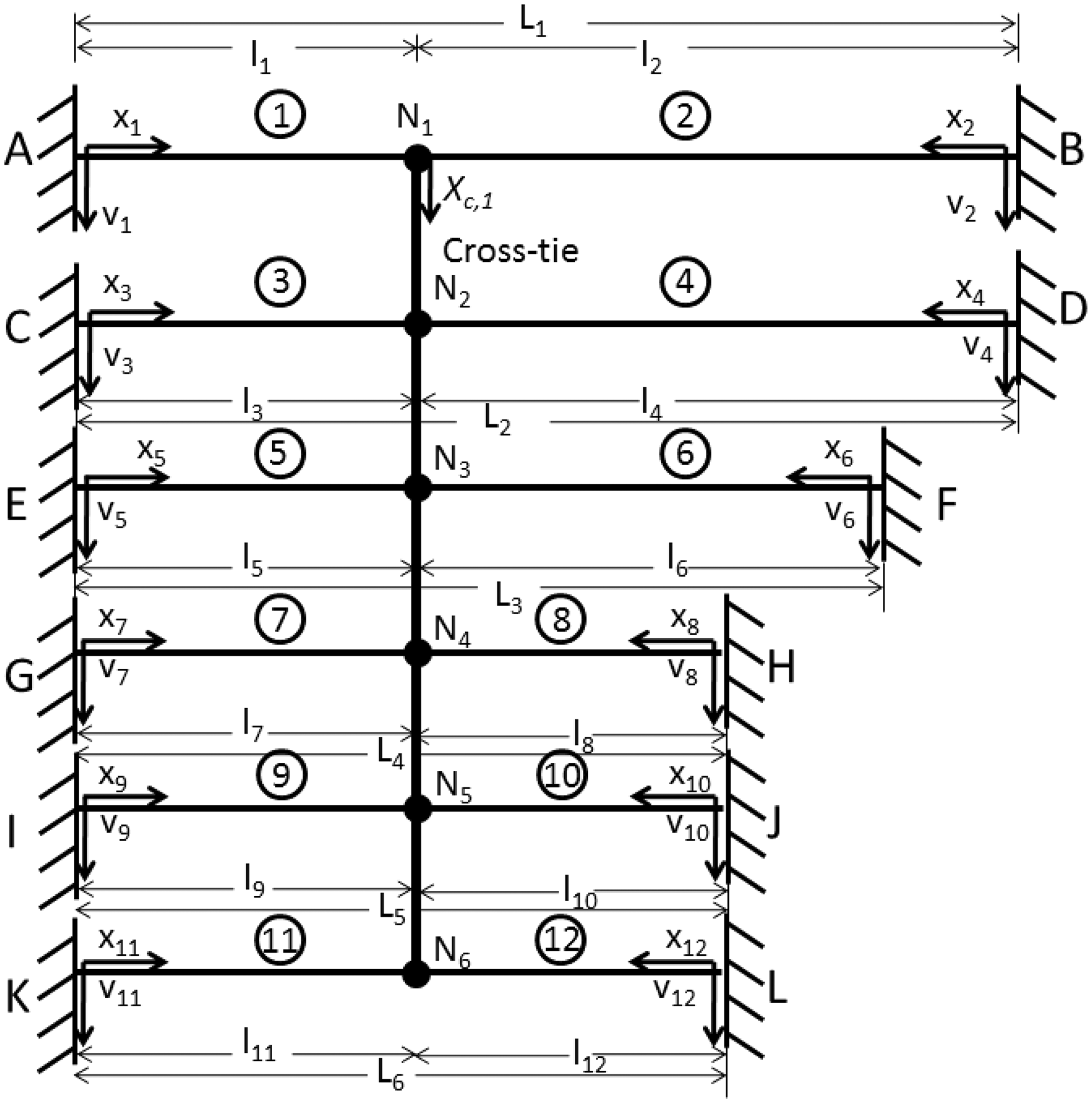
To further verify the validity of the proposed network analytical model and its characteristic equation (Equation (15)), a numerical example of an asymmetric DMT cable network is presented in this section. As shown in Figure 10, the studied cable network consists of six horizontally laid main cables. They are aligned at the left ends and are interconnected by a single line of transverse rigid cross-ties located at 1/3 span of the first cable (assumed to be the target cable). All six cables are fixed at both ends. The nondimensional system parameters of these cables are as follows:
Schematic layout of an asymmetric six-cable network.
Therefore, the segment characteristic parameters 
Denote Modal characteristics of the first 14 modes of the example network.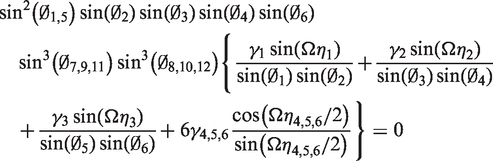
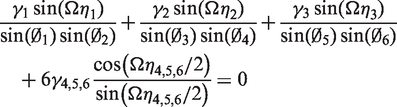




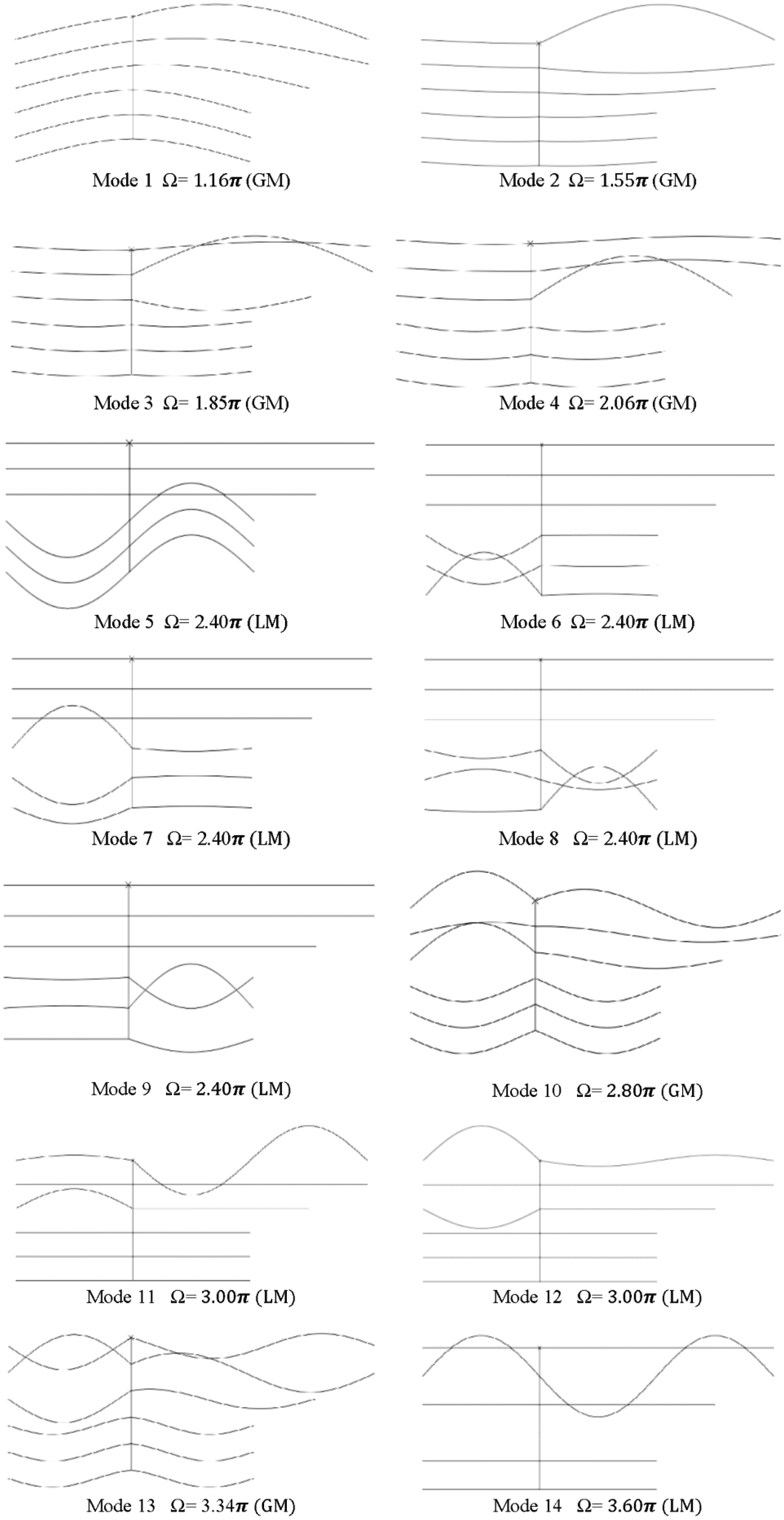
The first six roots of Equation (29a), in terms of the nondimensional system frequency Ω, are 1.16π, 1.55π, 1.85π, 2.06π, 2.80π, and 3.34π. They are the 1st, 2nd, 3rd, 4th, 10th, and 13th modes in Figure 11. In these modes, the left and the right segments of all six cables are excited to vibrate. Based on the definition of the nondimensional system frequency, that is, Ω = πf/f1, where f and f1 are respectively the network system frequency and the fundamental frequency of cable 1 (the target cable), by connecting the target cable with the other five cables in the current example, its fundamental frequency has been increased by 16%. It is interesting to note that in some of the global modes, certain cable segment(s) manifest(s) more significant oscillations than the others. This is mainly because the fundamental frequency of these segments happens to be in the vicinity of the global modes, and thus lead to ‘resonance’ phenomenon. For example, the frequency of mode 2 is Ω = 1.55π, whereas that of the right segment of cable 1, which yielded from
The roots for Equation (29b) are Ω = 1.5nπ (n = 1, 2, 3…) which represent the local oscillations of the right segment of cable 1. The smallest root is Ω = 1.5π. Due to its close proximity with the second global mode frequency Ω = 1.55π, this local mode actually couples with the global mode in terms of more significant vibrations of this particular cable segment, as discussed earlier.
Equation (29c) has two sets of equal roots Ω = 3.0nπ (n = 1, 2, 3…). For each value of n, two modes with the same modal frequency but different mode shape are present. When n = 1, they represent modes 11 and 12 in Figure 11, of which the left segment of cables 1 and 3 are excited in the 1st symmetric mode. In addition, since Ω = 3.0π is the second root of Equation (29b), in modes 11 and 12, the right segment of cable 1 is also vibrating, but in the 1st anti-symmetric mode.
The roots and the corresponding modal characteristics associated with Equations (29d) and (29e) are very similar to that of Equations (29b) and (29c). The roots of Equation (29e) are Ω = 1.8nπ (n = 1, 2, 3…), which represent the local motions of the right segment in cable 2. The lowest mode has a frequency of 1.8π, which is very close to the frequency Ω = 1.85π of the 3rd global mode and thus couples with it. The second root Ω = 3.6π (when n = 2), which describes the oscillation of this cable segment in the 1st anti-symmetric mode, happens to be the smallest root of Equation (29d) representing vibrations of the left segment of cable 2 in the 1st symmetric mode. The motions of these two-cable segments are thus coupled in mode 14. As can be seen in Figure 11, in mode 14, only cable 2 is excited. Its left segment vibrates in the 1st symmetric mode and its right segments in the 1st anti-symmetric mode.
Ω = 2.0nπ (n = 1, 2, 3…) are the roots for Equation (29f). They are associated with local motions of the right segment in cable 3. As mentioned earlier, the lowest frequency of Ω = 2.0π is very close to that of the 4th global mode (Ω = 2.06π). Thus, the two modes are coupled, and more considerable oscillation of this particular cable segment can be clearly observed from the mode shape of mode 4.
Equations (29g), (29h), and (29i) describe the local motions associated with the cable segments in cables 4, 5, and 6. Equation (29h) gives two sets of local modes (Ω = 2.4nπ, n = 1, 2, 3…) associated with oscillations of the left segments in these three cables. When n = 1, they are modes 6 and 7 in Figure 11. Similarly, Equation (29i) gives two sets of local modes (Ω = 2.4nπ, n = 1, 2, 3…) containing vibrations of the right segments of these three cables. The lowest value of Ω = 2.4π corresponds to modes 8 and 9 in Figure 11. In the case of Equation (29f), although the same roots of Ω = 2.4nπ (n = 1, 2, 3…) can be derived, the corresponding mode shapes include motions of both segments in cables 4, 5, and 6. When take n = 1, it corresponds to mode 5 in Figure 11.
In-plane modal properties of an asymmetric different-mass-tension six-cable network with a single line of rigid cross-ties at one-third span.
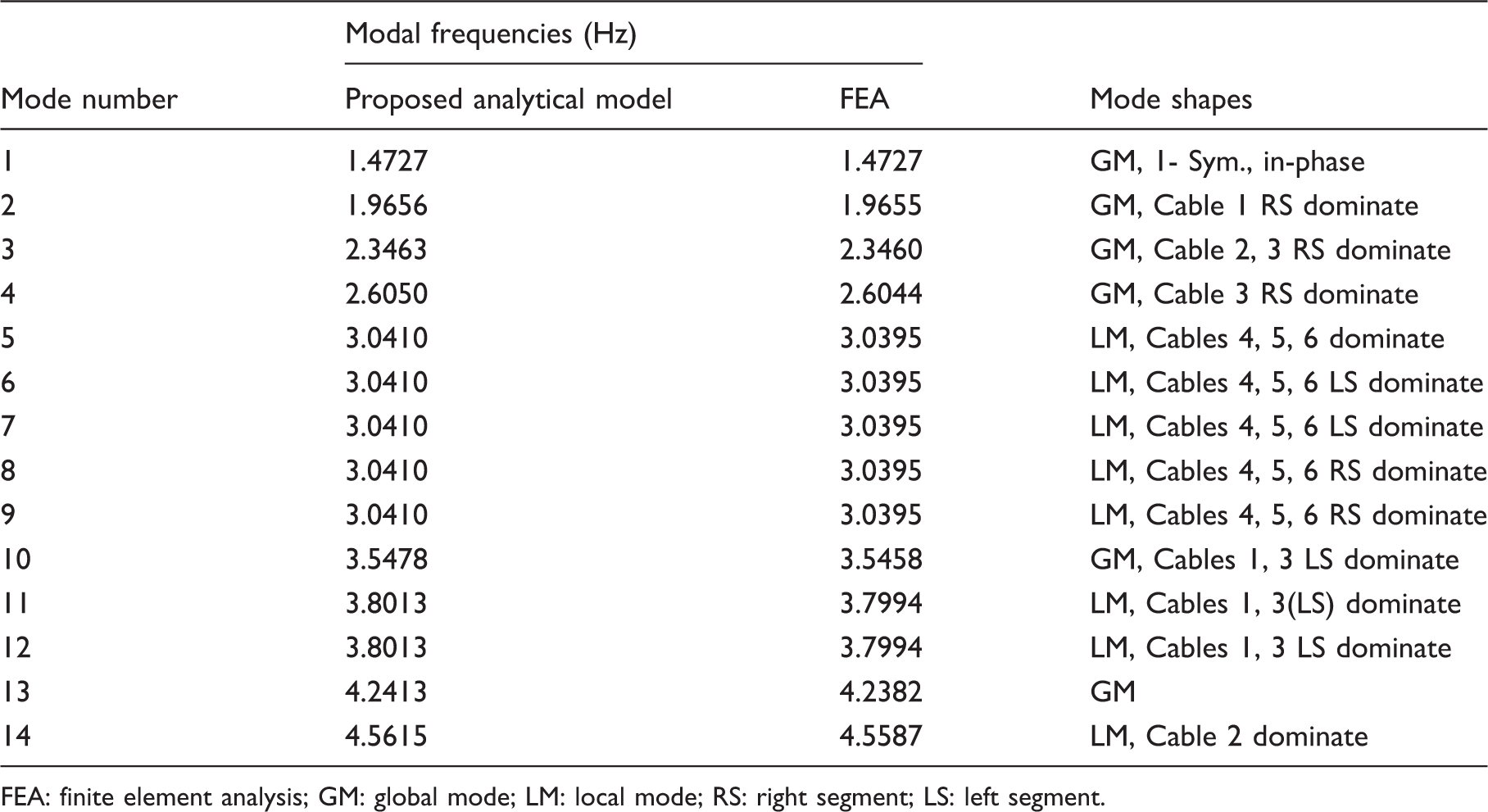
FEA: finite element analysis; GM: global mode; LM: local mode; RS: right segment; LS: left segment.
From the above discussion, it is clear that the local and the global modes are very sensitive to the frequency of different cable segments in a network. Under certain combinations of network geometric layout and cable properties, coupling between a local mode of cable segment(s) and a network global mode could occur, which is the ‘resonance’ phenomenon observed in the current example. This type of phenomenon should be avoided in the cable network design. When selecting the position for cross-ties, it is recommended that the so divided cable segments should not have local modal frequencies in the close proximity of the network global modal frequencies.
6. Conclusions
Using cross-ties is one of the effective countermeasures to suppress unfavorable bridge stay cable vibrations. Although the strategy has been successfully applied on site, the dynamic behavior of such a cable network is not fully understood. In this paper, an analytical model of a general cable network consisting of n horizontally laid taut cables interconnected by a single line of transverse rigid cross-ties has been proposed in order to study its in-plane modal behavior. The proposed analytical model has been applied to a number of cable networks with various configurations to verify its validity and demonstrate its flexibility. The modal analysis results yielded from the proposed analytical model are found to agree well with those obtained from an independent numerical simulation. The following conclusions can be drawn from the present work.
The segment ratio, the frequency ratio, the mass-tension ratio, and the number of main cables are identified to be the key system parameters that govern the in-plane modal behavior of a cable network with a single line of rigid transverse cross-ties. In addition to the global modes, of which all main cables in the network are excited, numerous local modes dominated by a single main cable, or a group of few main cables, or part of the main cables (left or right segments) also exist in a cable network. The modal properties of the global modes in a twin-cable network are independent of the segment ratio. However, the local modes, dominated by either the right or the left segments of the main cables, purely depend on this parameter. They form complimentary pairs. At certain cross-tie positions, a modal tri-furcation phenomenon, of which a pair of complimentary local modes coexist with either a symmetric or an asymmetric global mode, has been observed. A minor variation of the cross-tie position at the vicinity of these segment ratio values could cause a drastic change of the modal behavior. Except the twin-cable system, in all the other studied cable network configurations, the modal frequencies of the global modes are higher than those of the target cable (main cable 1). Thus, the cross-tie solution is beneficial for enhancing the in-plane stiffness of the target cable. To improve the in-plane stiffness of a target cable, it should be connected with neighboring cables having either lower frequency ratio and/or higher mass-tension ratio. In a symmetric SMT four-cable network, when all three neighboring cables have the same frequency ratio and a single line of rigid cross-ties is installed at the mid-span, five different sets of local modes are identified to share the same modal frequency. These local modes are dominated by vibrations of either a single or a group of two neighboring main cables. This is consistent with the findings by Caracoglia and Zuo (2009), which suggested avoiding the evenly spaced configuration, since local modes associated with main cables cannot be suppressed. The selection of cross-tie position should avoid inducing of modal frequency resonance between a global mode and local mode(s) of cable segment(s).
It is worth pointing out that using cross-tie(s) to connect a problematic cable with its neighbor(s) would not only affect its modal frequency, but also will have an impact on its damping property. Also, the impact of the identified key system parameters on the in-plane modal behavior of a general cable network need to be investigated in depth. The nonlinear interaction between the transverse vibration of main cables and the longitudinal motion of cross-ties has not been considered in the analytical formulation of the current work. However, as indicated by Giaccu and Caracoglia (2012, 2013), snapping or slacking of cross-ties may occur on real bridges, of which the cross-ties would exhibit nonlinear behavior. These issues will be further explored in future publications to comprehend our understanding of mechanics associated with a cable network system, which is expected to contribute to the more effective design of such a cable vibration control strategy. In addition, the current analytical study is focused on cable networks consisting of n horizontally laid main cables interconnected transversely with a single line of rigid cross-ties having idealized orthogonal configuration between main cables and cross-ties, and thus cannot be directly applied to cable networks on real bridges. However, it is very important to properly understand the mechanisms associated with such a more idealized system before introducing various other factors. Seeking an 'elegant' solution for practical cable networks having multiple cross-ties and inclined cables will be challenging. The effort made in the present work will serve as paving stones to lead us closer to this goal.
Footnotes
Funding
This work was supported by the Natural Sciences and Engineering Research Council of Canada (NSERC).