
Abstract
This paper presents the design and development of a robust proportional derivative (PD) controller based on linear matrix inequality (LMI) for the control of a hub angular position and end-point deflection of a planar two-link flexible manipulator. The dynamics of the manipulator is uncertain and time varying due to the variation of payloads that result in large variations in the excitation of flexible modes. Practical design steps are presented in which the LMI-based conditions are formulated to obtain a robust PD gains to control the flexible manipulator. The robust controller has an advantage as compared to the Ziegler-Nichols tuned PD controller as the identified PD gains can be used to control the system under various loading conditions. The performances of the proposed controller are evaluated in terms of input tracking capability of the hub angular position response and level of deflection of both links of the flexible manipulator. Experimental results show that despite using the same sets of PD gains, LMI-PD control provides better robustness and system performance.
1. Introduction
Flexible manipulators offer several advantages over rigid robots such as requiring less material, being lighter in weight, consuming less power, requiring smaller actuators, being more maneuverable and transportable and having less overall cost and a higher payload to robot weight ratio. These types of robots are used in a wide spectrum of applications starting from simple pick and place operations of an industrial robot to micro-surgery, maintenance of nuclear plants and space robotics (Dwivedy and Eberhard, 2006). However, control of flexible manipulators to maintain accurate positioning is extremely challenging. The complexity of the problem increases dramatically for a two-link flexible manipulator as the system is a class of multi-input multi-output (MIMO) system and several other factors such as coupling between both links and the effects of vibration between both links have to be considered. For single-link manipulators, linear models have been shown to be sufficient to solve the control problems. A two-link flexible manipulator, instead, necessitates more precise and complex nonlinear models, leading to complex control algorithms. Moreover, the dynamic behavior of the manipulator is significantly affected by payload variations.
As the control problem is challenging, there is a great interest in the development of control strategies for flexible manipulators. Several control strategies have been reported for control of these manipulators which include a proportional derivative (PD) controller (Choura and Yigit, 2001), optimal control (Morris and Madani, 1998), adaptive control (Pradhan and Subudhi, 2012), fuzzy logic control (Qiu et al., 2013) and decomposed dynamic control (Yin et al., 2013). Several robust controllers have also been proposed for control of these manipulator systems. These include a combined robust algorithm based on a sliding mode variable structure and H∞ control (Li et al., 2000) and a robust controller using neural network-based quasi-static deflection compensation (Li et al., 2005). H∞-based proportional-integral-derivative (PID) control has been proposed for the control of a single-link flexible manipulator (Ho and Tu, 2006).
One of the promising techniques for optimizing controller parameters is using linear matrix inequality (LMI). As LMIs can be solved numerically by using efficient standard numerical algorithms, a number of works applied these to control problems. These include development of a robust PID controller for a continuous stirred-tank reactor based on a linear quadratic regulator (LQR) and LMI approach (Ge et al., 2002), robust controller for MIMO systems (Chou et al., 2007), robust PID compensation for an inverted-cart pendulum system (Ghosh et al., 2012) and the application of LMI to design a robust decentralized controller for continuous linear time-invariant systems (Labibi et al., 2011). Besides the above, the LMI approach has been used to obtain an optimal sliding surface for sliding mode control of active magnetic bearing systems (Husain et al., 2008) and for a robust controller of boost converters (Olalla et al., 2010). A two-step design procedure for LMI-based robust PID synthesis has been proposed based on convex optimization considering the closed-loop transfer matrix and robust regional pole-placement as objective functions (Goncalves et al., 2008).
This paper presents the design and development of a robust PD controller based on LMI approach for a nonlinear two-link flexible manipulator. It is found that the LMI approach has not been explored for control of a two-link flexible manipulator where the system dynamics have uncertainties due to the variation of payloads. Using the robust controller, identified PD gains can be used for all payloads with satisfactory responses. This is an advantage as compared to Ziegler-Nichols (ZN) tuned PD control which needs to be re-tuned for different payloads. The ZN tuning method is a standard procedure for the tuning of PID controller parameters. To cast this control design problem into the LMI framework, the transfer functions of the system with various payloads are obtained by carrying out system identification. Subsequently, the dynamic model is represented into convex formulation which leads to the formulation of system requirement into LMIs representation that can accommodate the convex model. A set of robust PD gains is then obtained by solving the LMIs with desired specifications. For performance assessment, LMI-PD and ZN-PD controllers are compared for control of the manipulator in terms of input tracking, deflection reduction level and robustness to payload variations of both links. Experimental results show that better robustness and system performance are achieved with LMI-PD controller despite using a single set of PD gains.
2. The two-link flexible manipulator
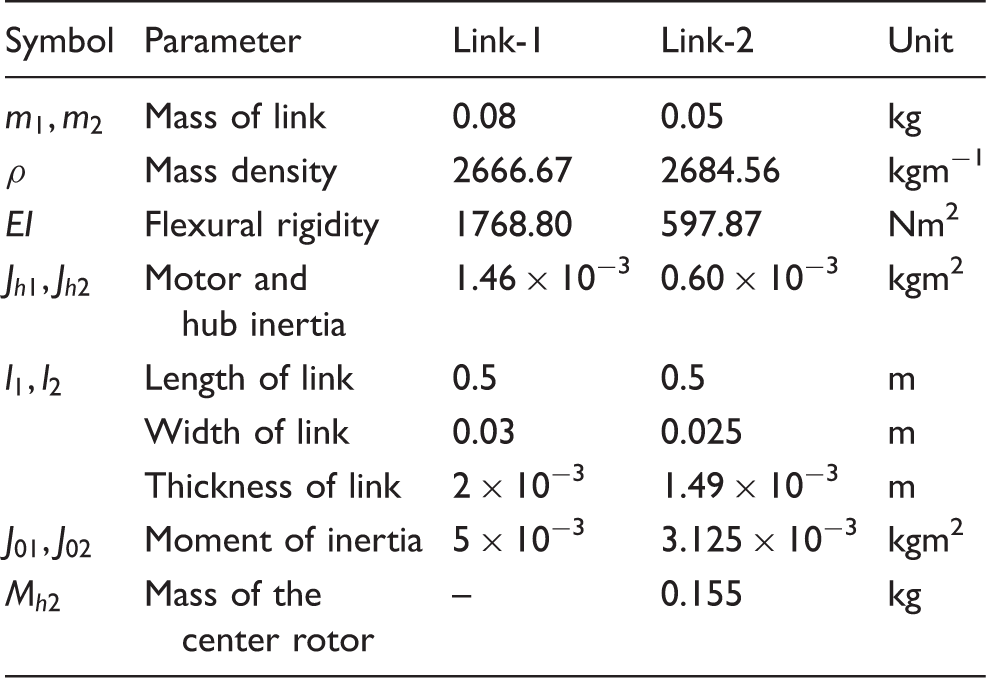
Figure 1 shows the experimental setup of a two-link flexible manipulator used in this work. The rig consists of three main parts: a two-link flexible arm, sensors and a processor. The flexible links are constructed using a piece of thin aluminum with specifications as given in Table 1. The links are cascaded in a serial fashion and are actuated by rotors and hubs with individual motors. l1 and l2 denote link lengths of uniform mass density per unit length The experimental setup of a two-link flexible manipulator. Parameters of a two-link flexible manipulator.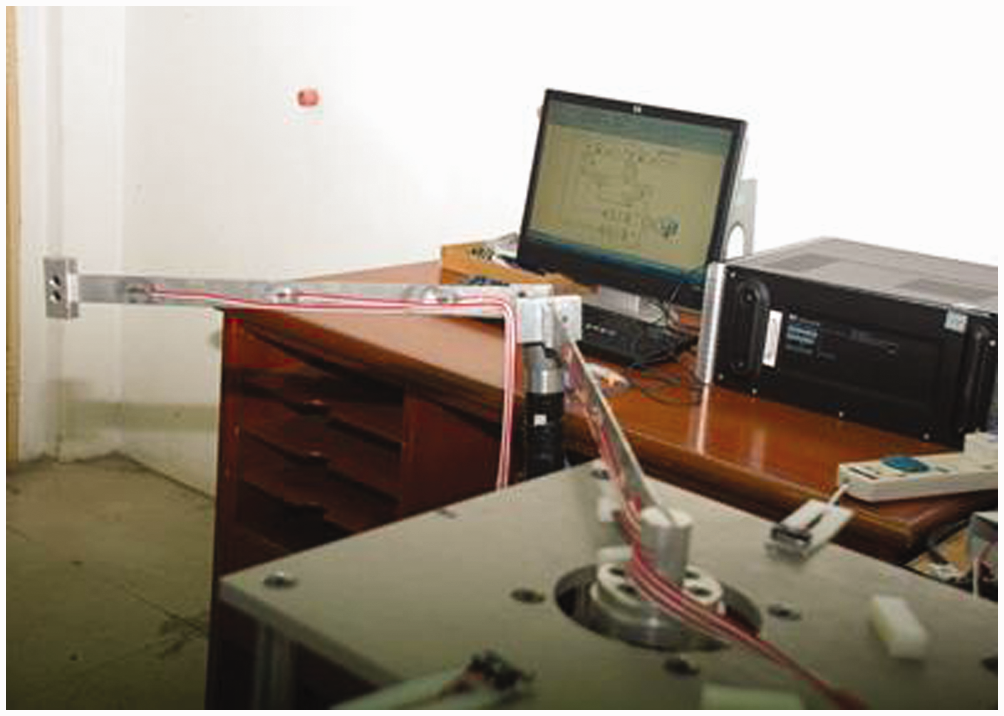
The sensors used in the system are shaft encoders at the motors and strain gauges placed along the arms. Two encoders, HEDL-5540 and HEDS-5540 (Maxon Motor Ag Corporation, 2003) with 500 counts per revolution are used to measure the angular positions of link-1 and link-2 respectively. A precision interface circuit consisting of PCIQUAD04 with four input channels has been constructed for measurement and interfacing with a real-time system. On the other hand, the strain gauges are used for measurement of deflections of the links.
MATLAB Real-time toolbox is used for real-time interfacing and control of the system. Data acquisition and control are accomplished by employing a PCI6221 I/O board that provides a direct interface between the processor, actuators and sensors through signal conditioning circuits SCC-AI for analogue input, SCC-AO for analogue output and SCC-SG for strain gauges. The experimental rig requires two-analogue outputs for both motors and four analogue inputs from the encoders and strain gauges for both links.
3. Dynamic model
Modeling of a two-link flexible manipulator resulted in nonlinear dynamic equations of motion as detailed in Khairudin el al. (2010). Due to high nonlinearity of the dynamic model, formulation of a robust control algorithm is difficult, and thus a simple and practical method is required. Moreover, control of the nonlinear and high complexity model control design methods often require excessive computational time. In this study, formulation of a robust control method is based on a set of linear models which closely represent the nonlinear model of a two-link flexible manipulator. This is obtained by carrying out system identification under various system payloads which further leads to a much simpler controller, yet capable of achieving various system requirements.
Using the system identification technique, a set of linear models of the two-link flexible manipulator that represents the operating ranges of the dynamic system is obtained. A multisine signal that produces sinusoids of different amplitudes and frequencies, and can be summed to constitute a persistent excitation signal is used in the identification process. The signals are carefully adjusted to provide very low speed operation, which is essential for examination of the system nonlinearities. Figure 2 shows the multisine signal applied to both links.
A multisine input signal.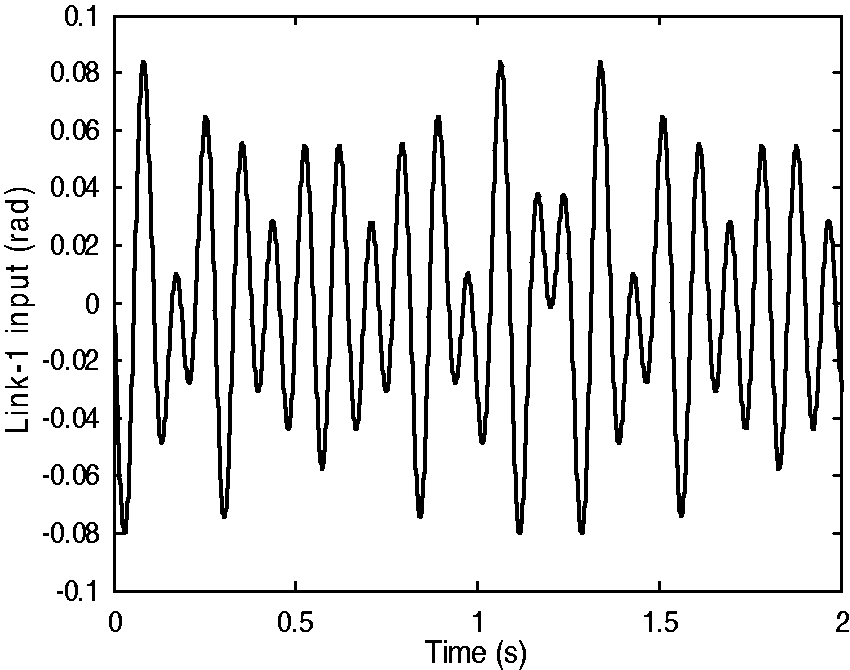
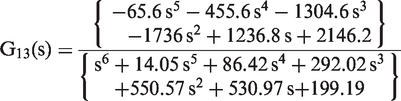
The data of stimulation and response is acquired with a sampling time of 0.001 s and system identification is performed using MATLAB to obtain a linear model of the system. An ARX model structure is considered and the least square technique is applied to identify the parameters of the transfer function model. In this work, the model structure 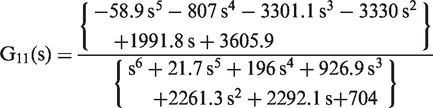
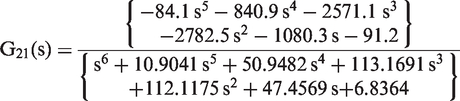
The same procedures are adopted to obtain transfer functions of the flexible manipulator with payload. With a payload of 50 g, the transfer function for link-1 is obtained as
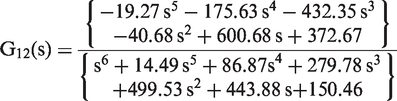
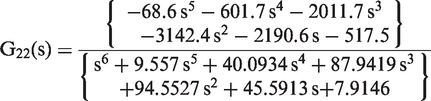
On the other hand, with a payload of 100 g, the transfer function for link-1 can be found as
Comparison of the responses to the multisine input signal obtained using the linear models and actual system reveal that all the transfer functions of the flexible manipulator have a matching degree of at least 94%. Thus, confidence in utilizing the identified models has been established. On the design of the LMI robust controller, the transfer functions are converted into state-space forms. Subsequently, the models are used in the development of ZN-PD and LMI-PD controllers.
4. Design of linear matrix inequality (LMI)-based robust proportional derivative (PD) controller
In this work, the LQR approach is considered as a basis for determining the PD controller gains since this approach can provide a high degree of robustness and design flexibility. Moreover, it can be formulated in term of a performance-based optimization problem which can be solved using a numerical technique (Ge et al., 2002). To ensure that the approach is applicable simultaneously to the set of multiple linear models, the LQR problem needs to be represented in term of LMI sets for finding the common Lyapunov function for the set of particular linear models. The solution of the linear model involves a form of quadratic Lyapunov function that not only gives the stability of the closed-loop control system but can also be used to achieve certain desired performance specifications.
4.1. Robust proportional derivative (PD) controller design
Most of the existing PD tuning methods were developed with few robustness features. Since a robust controller is required to control a two-link flexible manipulator under various payload conditions, a robust PD controller design is proposed in this work.
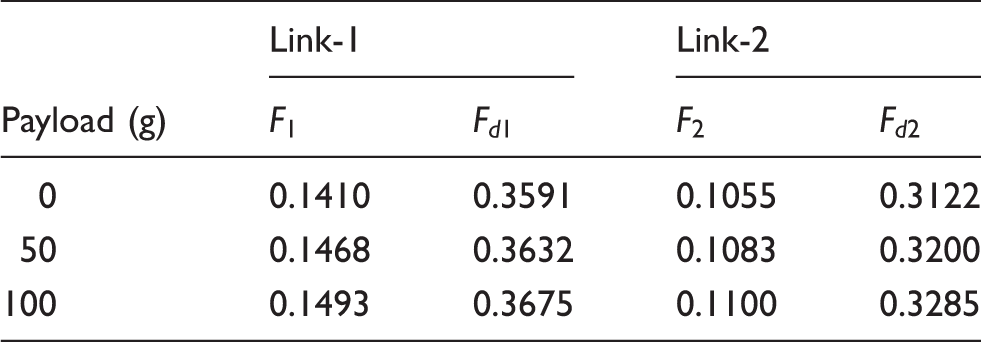
Consider an uncertain sixth-order system for link-1 and link-2 as

The objective of the PD controller design is to determine PD gains to meet various design specifications. The PD controller is designed in the state-space settings for ease in using the LMI approach. The flexible link can be conveniently represented as a feedback system and it can be expressed in the state-space description as





The resulting closed-loop system with the PD controller in equation (14) can be obtained as



4.2. Linear matrix inequality-based robust proportional derivative controller
The concept of LMI and the constraints used in the controller synthesis problem for design of the robust PD controller is presented in this section. The standard LQR problem is to determine the control signal u which minimizes the quadratic cost function. The cost function in equation (13) can be expressed as


Define that the matrix


An efficient alternative for solving the LQR problem is to exploit the LMI technique that has emerged recently as a powerful design utility for a variety of control problems due to its convexity. Define design matrices Hp and Gp of appropriate dimensions, equation (16) can be written as

Using Schur complements (Boyd et al., 1994), equation (21) can be written as
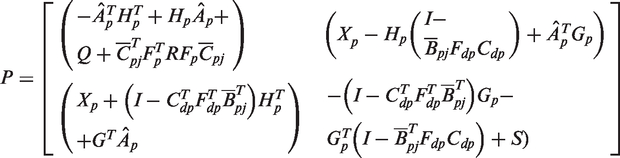
There exist matrices Xp, Hp, Gp, Fp and 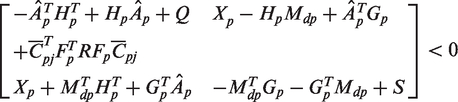

It is noted that
To obtain a solution of LMIs in equation (23) all over the uncertain system will obviously be an arduous task. However, since the uncertainties of the system can be described as a set polytopic uncertainty (Boyd et al., 1994; Ge et al., 2002), solutions can be sought only at the polytopic vertices instead of all points within the polytope. Therefore, a solution to LMIs in equation (23) can be obtained and the task for solving the constraint becomes simpler. The advantage of using LMI is its flexibility of including other specifications future system needs in the design. Therefore, various design specifications may be recast into the LMIs and the resulting LMI constraints can be efficiently solved in polynomial time by using convex optimization algorithms (Gahinet and Apkarian, 1994).
It is a desirable property of the closed-loop system that its poles are located in a certain region of the complex plane to ensure some desired dynamical properties such as overshoot and settling time are achieved. A region of the complex plane Pole-placement region.
5. Controller implementation
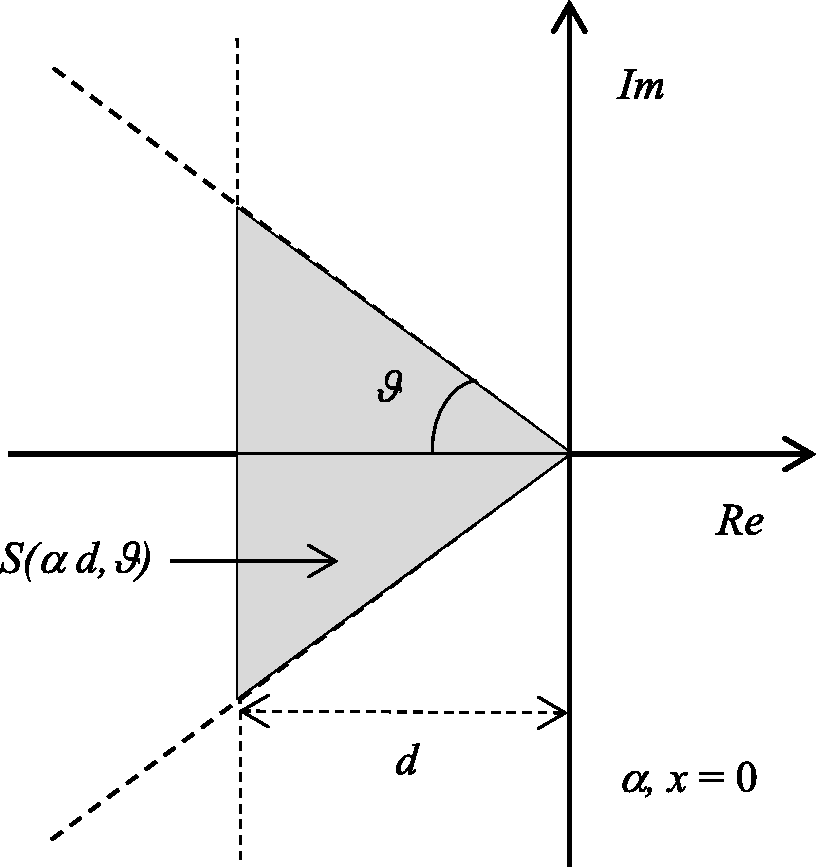
Figure 4 shows a block diagram of the PD controllers for position control of link-1 and link-2 of a flexible manipulator where A block diagram of the closed-loop system with proportional derivative (PD) controllers.
Proportional derivative parameters obtained using Ziegler-Nichols technique.
The flow chart shown in Figure 5 is adopted to develop the LMI-PD controller. Based on several investigations, Flow chart to develop and implement the linear matrix inequality (LMI)-proportional derivative (PD) controller.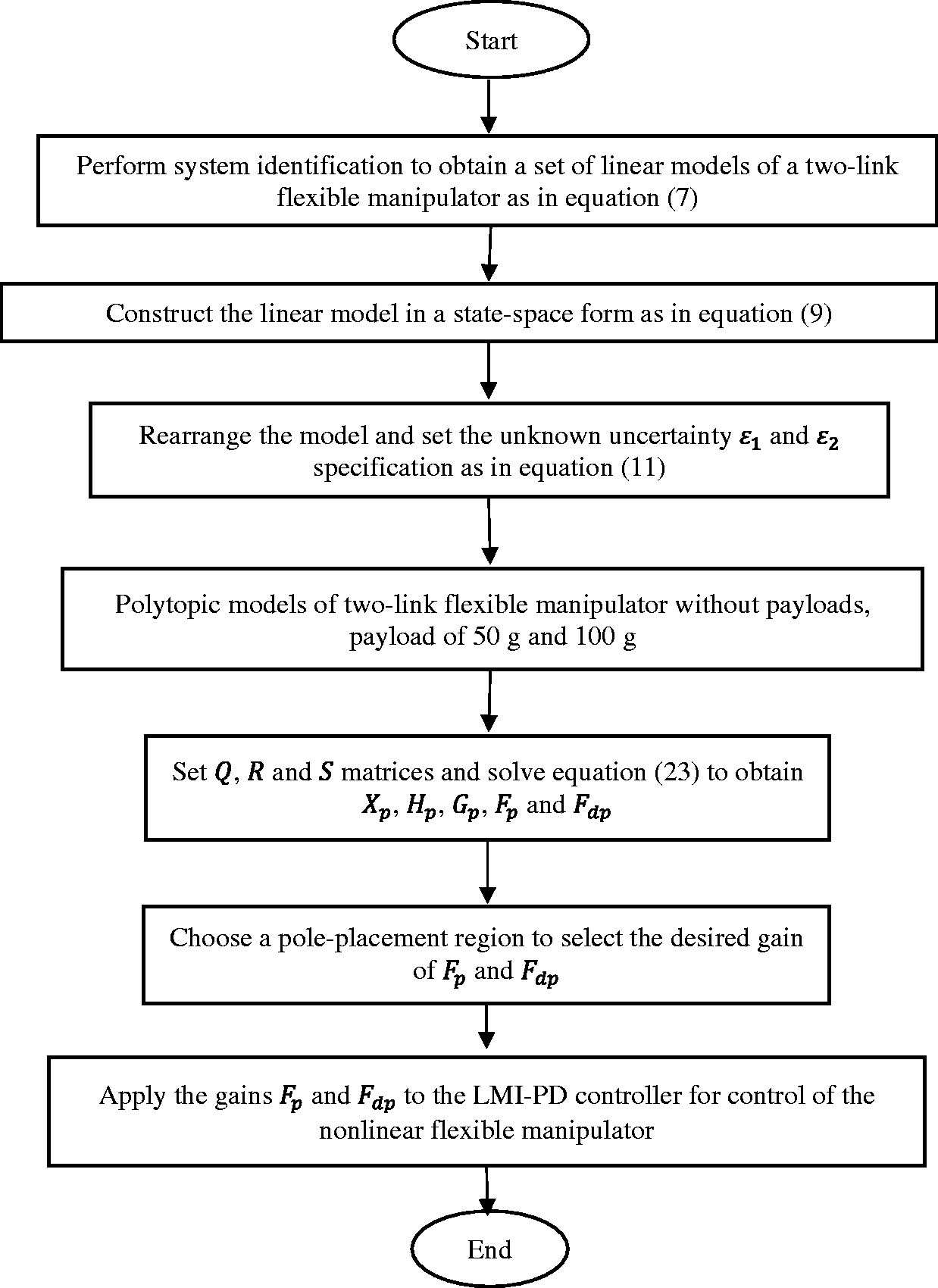
6. Experimental results
Experimental results of the LMI-PD and ZN-PD controllers implemented on the experimental two-link flexible manipulator are presented in this section. The task of these controllers is to position hub angles of link-1 and link-2 of the manipulator at −0.5 rad and 0.35 rad respectively. For real-time implementation of both controllers, Real-time Windows Target in MATLAB and Simulink environment are utilized.
6.1. System without payload
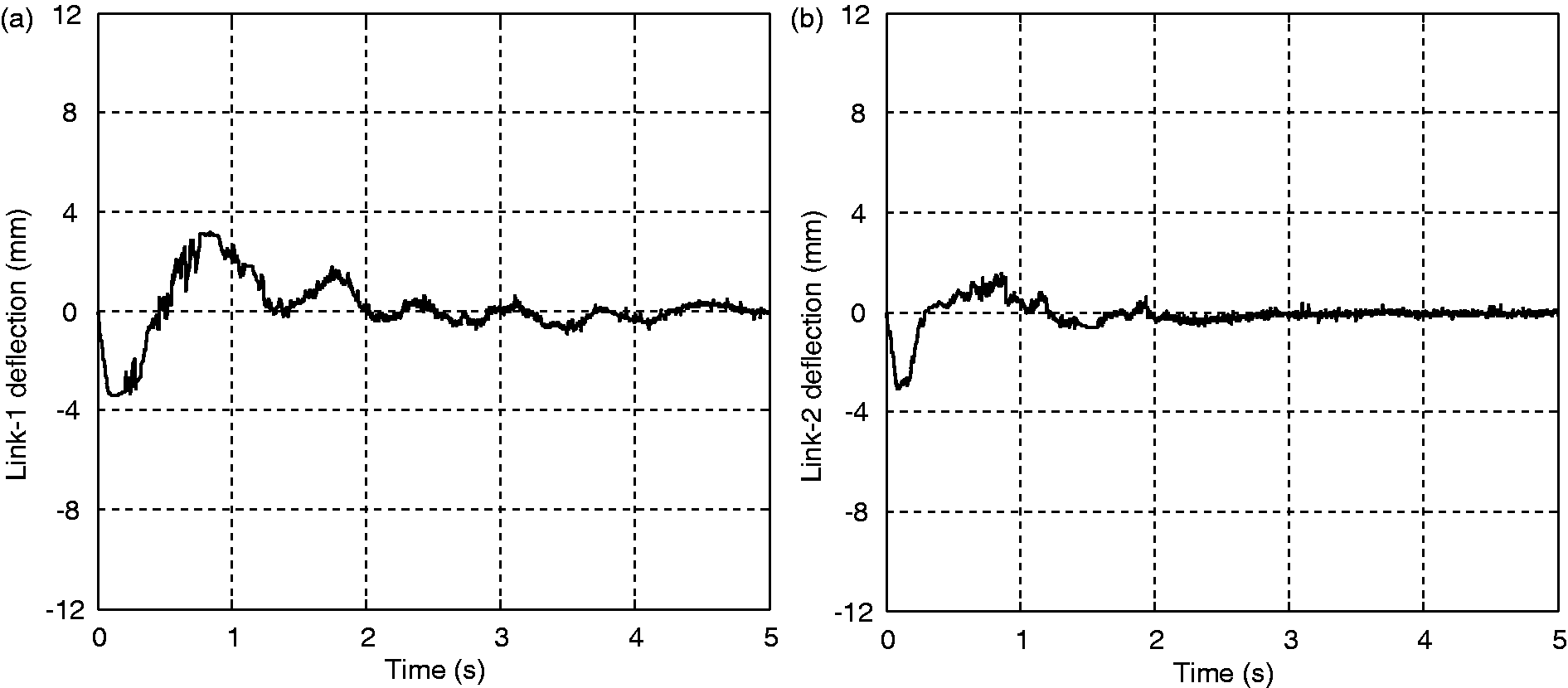
Figure 6 shows the hub angular position responses of the experimental two-link flexible manipulator without payload for both links with the LMI-PD and ZN-PD controllers. Both techniques are able to meet the desired angular positions of −0.5 rad and 0.35 rad for link-1 and link-2 respectively. However, it is noted that the system with LMI-PD control exhibits faster settling times for both links as compared to ZN-PD. Moreover, with LMI-PD control, smoother responses with no overshoot are observed and the settling times are almost 30% faster than the results with ZN-PD for both links. Deflection responses of link-1 and link-2 with both controllers are shown in Figure 7 where the magnitude of deflections with LMI-PD is lower as compared to the results with ZN-PD control. With the robust LMI-PD controller, the maximum magnitudes of deflection are 3.36 mm and 2.21 mm for link-1 and link-2 respectively whereas using ZN-PD as 7.50 mm and 5.00 mm. Moreover, the deflections with the robust controller converge to zero faster than the response with the ZN-PD control.
Angular position response of the experimental rig without payload (a) Link-1; (b) Link-2. Deflection response of the experimental rig without payload (a) Link-1; (b) Link-2.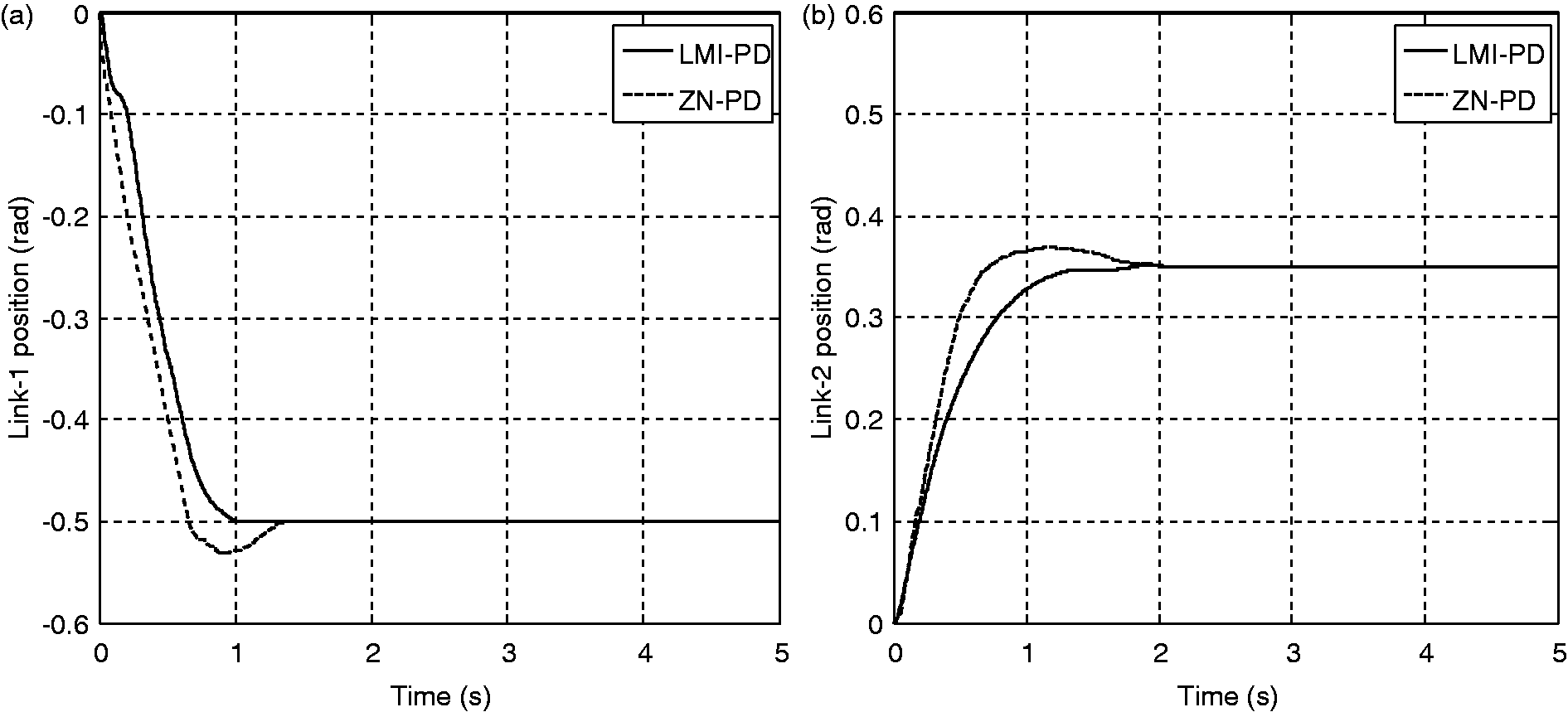

Figure 8 shows the frequency response of the deflection obtained with both controllers. In this work, the first mode of vibration is considered as this is the most dominant mode that characterizes dynamics of the deflection. It is shown that the level of deflections with the LMI-PD control is 8.59 dB and 6.91 dB lower than the response with the ZN-PD control for link-1 and link-2 respectively. This proves that the robust LMI-PD controller yields lower deflections.
Frequency response of deflection of the experimental rig without payload (a) Link-1; (b) Link-2.
6.2. System with payload
To assess the robustness performance of the controllers, the flexible manipulator with payloads of 50 g and 100 g is examined. For the ZN-PID controller, the PD gains given in Table 2 are used with the respective payloads whereas similar PD gains are used for the LMI-PID control. Figure 9 shows hub angular position responses of link-2 of the flexible manipulator when it is subjected with payloads of 50 g and 100 g, using both controllers. Despite varying payloads, both techniques are able to meet the desired angular position of 0.35 rad. Similar to the case without payload, the LMI-PD control has resulted in faster settling times as compared to the ZN-PD control. In addition with the LMI-PD control, no overshoot is observed. Table 3 summarizes the settling times and overshoots yielded with the application of the controllers for both the links. Figure 10 shows the deflection responses of link-2 while, by copying payloads of 50 g and 100 g, using both controllers. Similar to the case without payload, the robust LMI-PD controller yielded a smaller deflection as compared to the results with ZN-PD control for both payloads. Table 4 summarizes the maximum magnitude of the responses for link-1 and link-2 obtained with the LMI-PD control and ZN-PD control. For all cases, it is noted that maximum deflections with the LMI-PD control is reduced to almost half of the deflection with ZN-PD control. Moreover, the deflections converge to zero faster with the LMI-PD control.
Angular position response of link-2 of the experimental rig with payloads of 50 g and 100 g (a) 50 g; (b) 100 g. Deflection response of link-2 of the experimental rig with payloads of 50 g and 100 g payload (a) 50 g; (b) 100 g. Specification of angular position response of the flexible manipulator with various payloads. LMI-PD: linear matrix inequality-proportional derivative; ZN-PD: Ziegler-Nichols-proportional derivative. Maximum magnitudes of deflection responses of the flexible manipulator with linear matrix inequality-proportional derivative and Ziegler-Nichols-proportional derivative controllers. LMI-PD: linear matrix inequality-proportional derivative.; ZN-PD: Ziegler-Nichols-proportional derivative.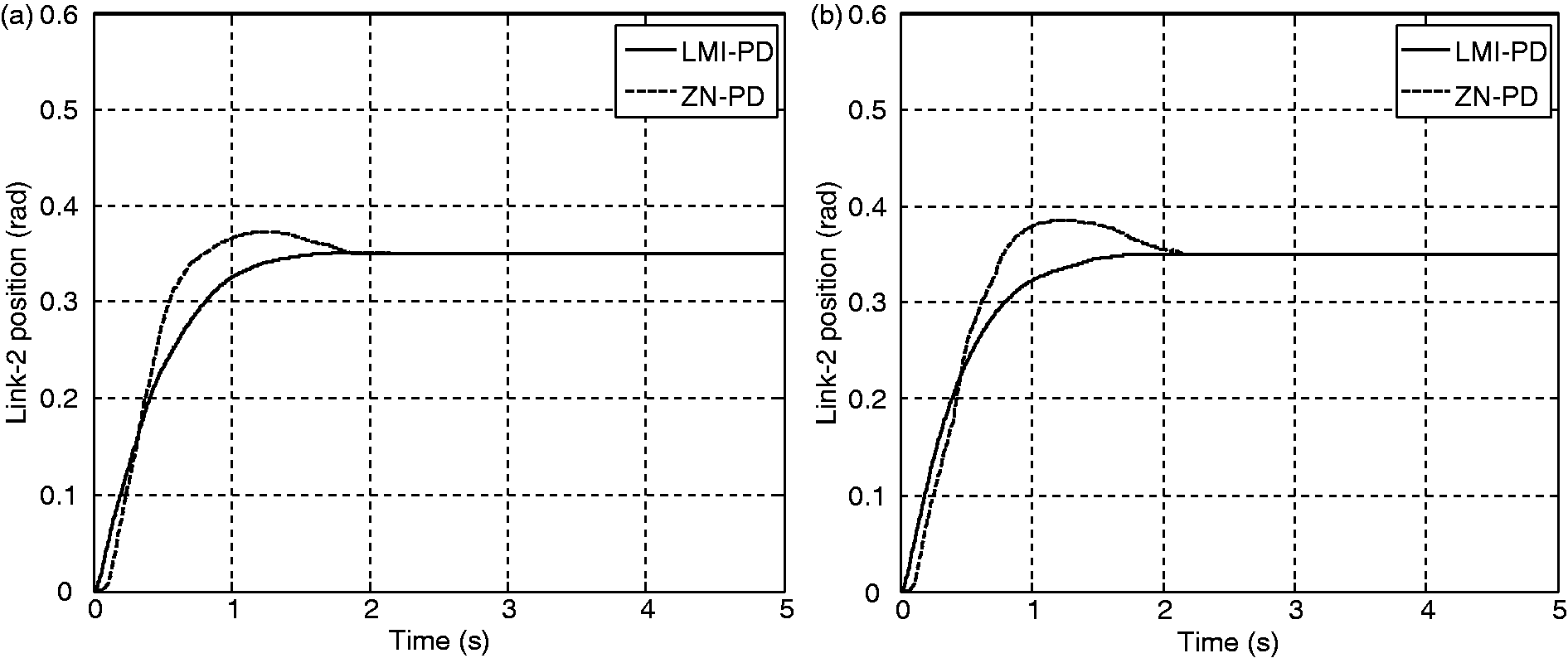
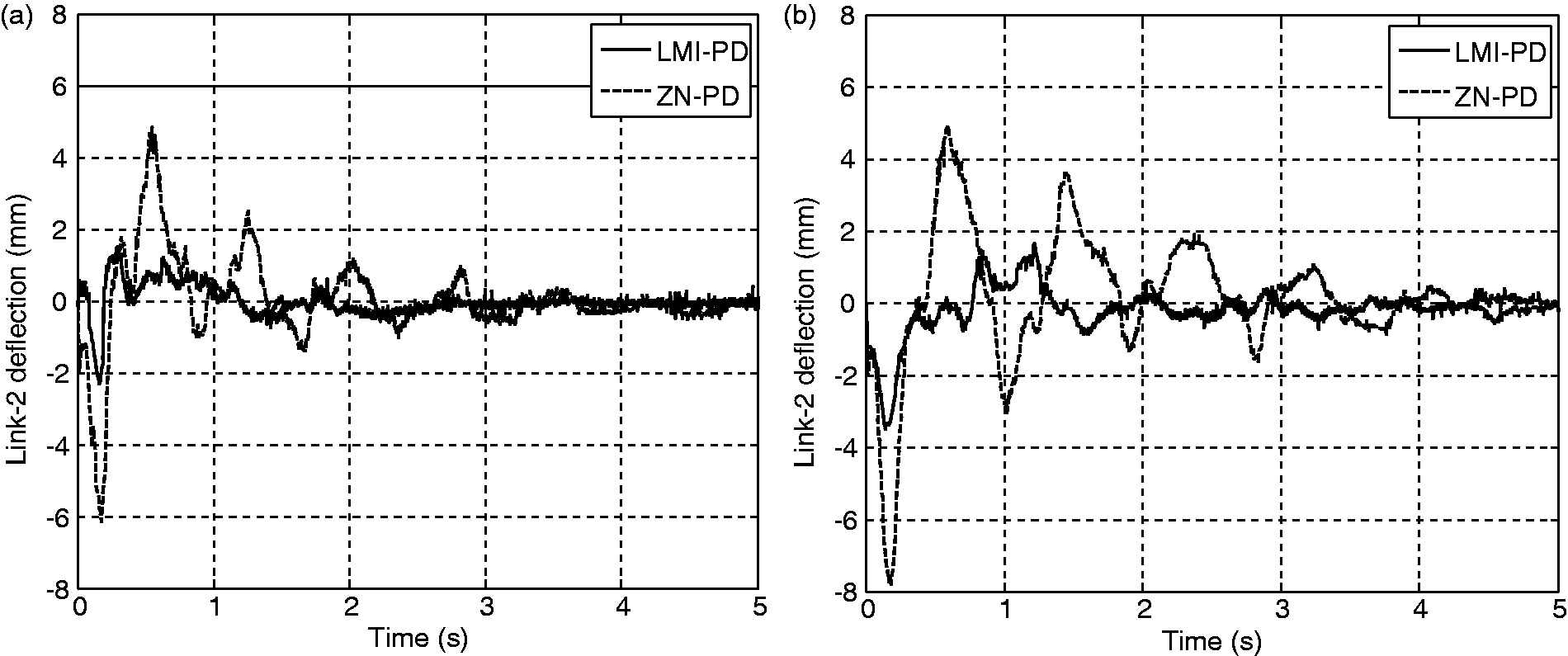
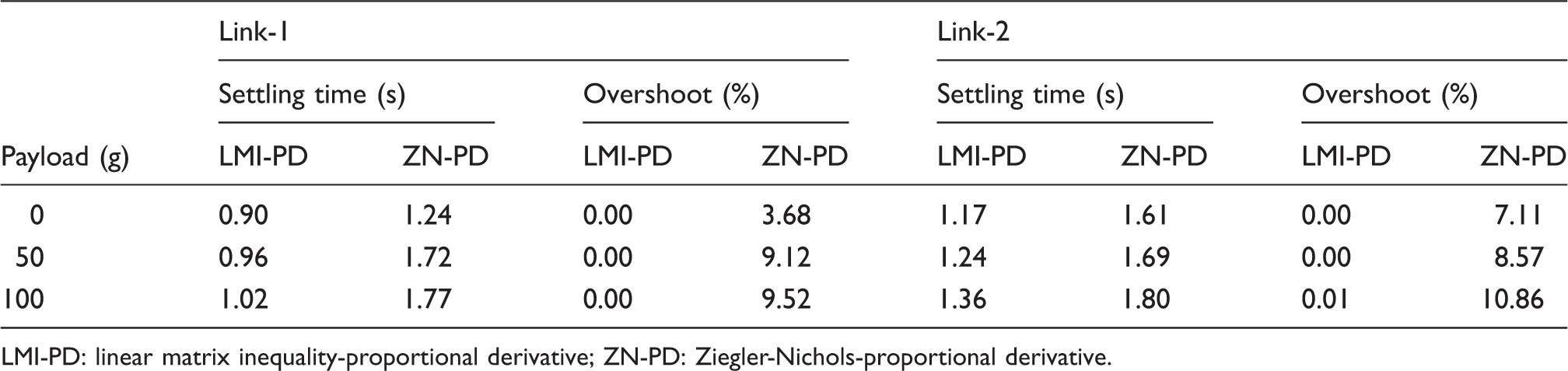
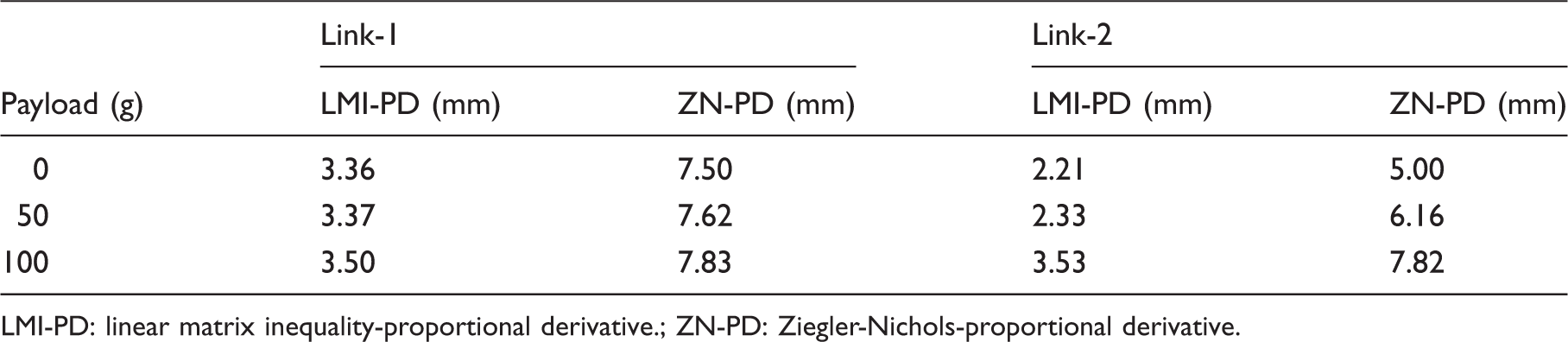
Figure 11 shows the frequency response of the deflection of link-2 obtained with both controllers for the manipulator with both payloads. Similarly, the deflection amplitude yielded with the LMI-PD is less as compared to with ZN-PD control. It is also noted that the deflection with LMI-PD control is 9.22 dB and 11.84 dB lower than with the ZN-PD control for payloads of 50 g and 100 g respectively.
Frequency response of deflection of link-2 of the experimental rig with payloads of 50 g and 100 g (a) 50 g, (b) 100 g.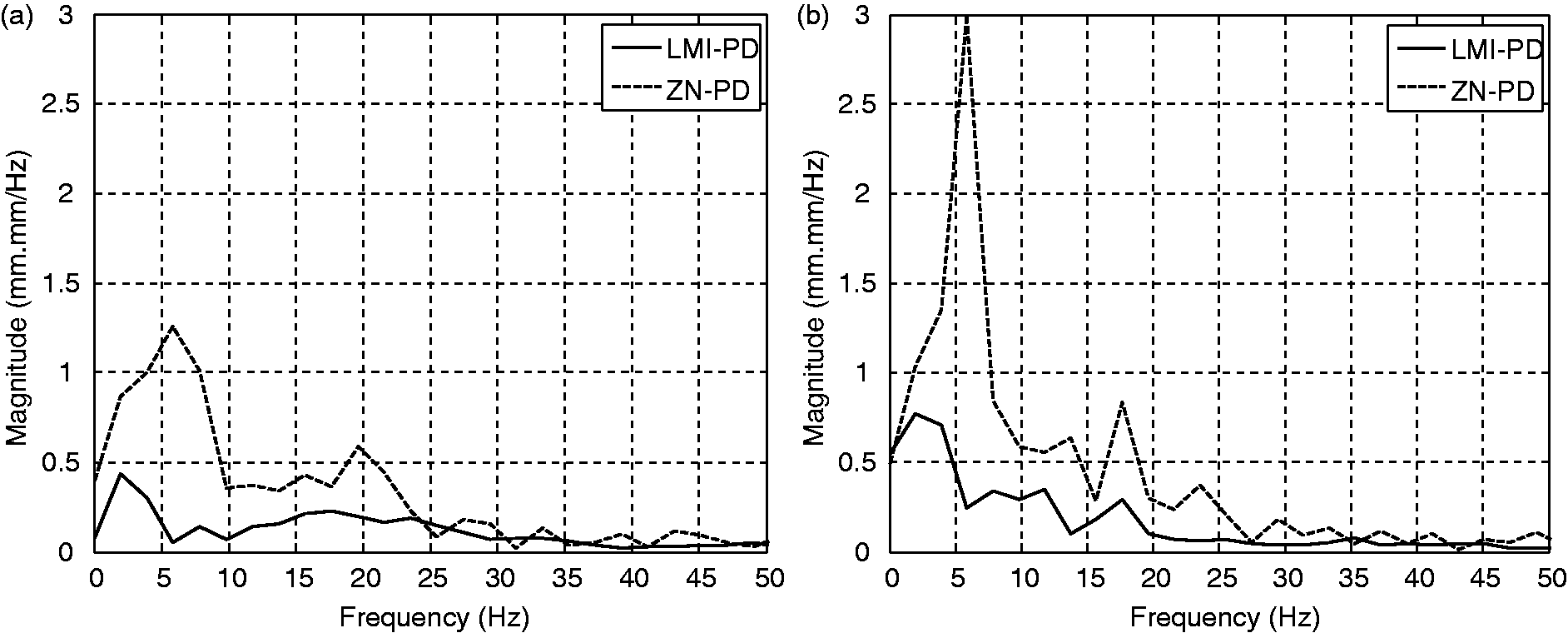
The robust LMI-PID controller is designed to control the flexible manipulator with a payload in a range of 0–100 g. Figures 6–11 show that the proposed robust controller provides satisfactory results and performs better than ZN-PID control for the system without and with payloads of 50 g and 100 g. However, as the three cases above are used in control design and setting the lower and upper bounds of the robust controller, it is desirable to verify the performance of the LMI-PID controller with a different payload. For verification, a flexible manipulator when it carries 70 g payload is examined. Figures 12 and 13 show the hub angular position and deflection responses of the manipulator with 70 g payload respectively, using the LMI-PD control. The same PD gains as in the previous cases are used. It is shown that the desired angular positions of −0.5 rad and 0.35 rad are achieved with settling times of 1.01 s and 1.32 s for link-1 and link-2 respectively, and no overshoot is observed for both links. Low deflections for both links as in the previous cases with other payloads are also noted. In this case, the maximum magnitudes for link-1 and link-2 are 3.43 mm and 3.11 mm respectively. Thus, it was verified experimentally, that for the flexible manipulator under various payload conditions, despite using the same PD gains, a uniform system performance is achieved with the robust LMI-PD controller. Note that by extensive efforts in tuning the ZN-PD controller, similar results as the LMI-PD control could be achieved. However the process is difficult and has to be performed for each loading condition.
Angular position response of the experimental rig with 70 g payload (a) Link-1; (b) Link-2. Deflection response of the experimental rig with 70 g payload (a) Link-1; (b) Link-2.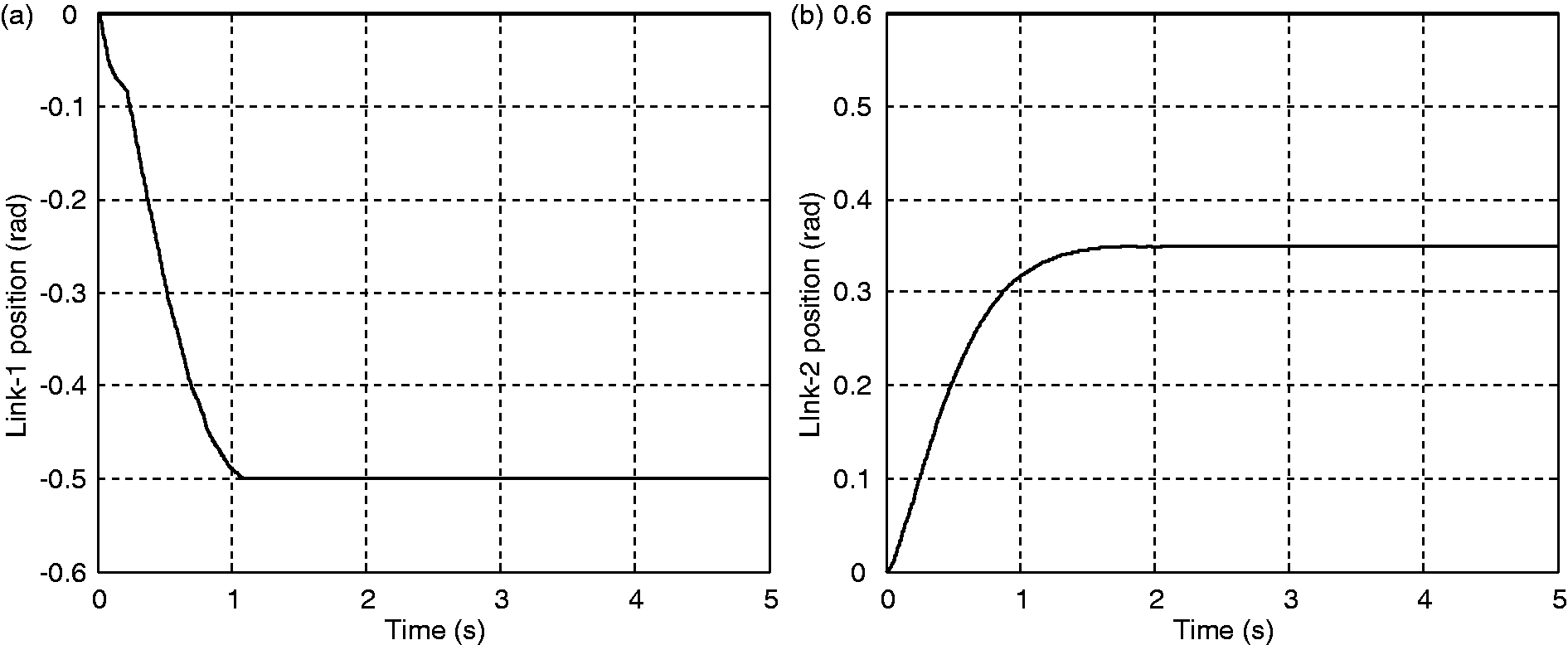
7. Conclusion
The development of a robust PD control of a two-link flexible manipulator based on the LMI approach has been presented. Practical design steps have been presented where the LMI approach has been employed to obtain robust PD gains to control the flexible manipulator under various payload conditions. Robustness in the performance of the controller has been evaluated in terms of input tracking capabilities and deflections of both links of the flexible manipulator. Experimental results envisaged that despite using the same sets of PD gains, the proposed LMI-PD control provides better control performance as compared to the ZN-PD controller. Similar results as the LMI-PID controller could be obtained by extensive effort in tuning the ZN-PID controller, however this requires laborious tuning effort for each loading condition.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.