
Abstract
Model reduction is a significant issue in dynamic system simulation and control, as a consequence of the unmanageable levels of storage and computational requirements for large-scale systems. In this paper, the concept of a balanced truncation approximation method is extended to large-scale systems with interval uncertainties to get the reduced-order model with uncertainties. In order to get the balanced system, the balancing transformation matrix is introduced by using the nominal system, and the reduced-order model with uncertainties is obtained by using balanced truncation. A major characteristic of this model reduction method is that the reduced-order model obtained in this way is also as uncertain as the original model. The closeness of the reduced-order model to the original model relies on the upper bounds of the ignored Hankel singular values. To compare the original model and the reduced-order model, a perturbation method is proposed to give the interval bounds of the responses of the original model and the reduced-order model. As applications of the proposed method, three numerical examples are given.
1. Introduction
The state-space method based on the finite element method (FEM) is popular in the field of dynamics and control, for example structural dynamics analysis, fluid-solid coupling vibration analysis, vibro-acoustic analysis and active control of vibration and noise. However, for a complete, large-scale finite element model, it is time-consuming and inefficient to obtain the structural responses to dynamic loads. Therefore, an approximate method, which can significantly improve the computational efficiency, is necessary (Antoulas, 2005). Model reduction is one such model approximation method, looking for a low-order model whose dynamic characteristics are close to the original model (Besselink et al., 2013).
A lot of research about model reduction techniques has been done in the dynamics and control field where the original complex models are completely deterministic (Dolgin and Zeheb, 2005; Ghommem et al., 2012). The first model reduction method is Guyan reduction, which is exact for a static model (Guyan, 1965). An improved reduced system (IRS) was proposed by O’Callaghan (1989) to improve the static reduction method. Friswell et al. (1995, 1998) proposed the iterative scheme to improve the accuracy of the IRS and proved its convergence. Xia and Lin (2004a, 2004b) revised the iterative IRS and proved that it converges more rapidly. However, in systems and control field, the most popular model reduction approach is the balanced truncation method, which was first introduced by Mullis and Roberts (1976) and developed by Moore (1981). Essentially, the balanced truncation method is selecting the states that have the largest contribution to the system response and neglecting the states that have the smallest contribution to the system response. The most notable feature of this method is that it can keep the stability of the original complex model and give an error bound for quality assessment of the reduced-order model. The closeness of the reduced-order model to the original model can be measured by this error bound. Another two related model reduction methods are optimal Hankel norm approximation and balanced singular perturbation approximation, which are built on singular value decomposition (Kokotovic et al., 1976; Glover, 1984; Liu and Anderson, 1989). Like the balanced truncation method, proper orthogonal decomposition is widely used to deal with model reduction problem in dynamics analysis, which focuses on nonlinear partial differential equations (Holmes et al., 1998; Bellizzi and Sampaio, 2009; Khattak et al., 2010; Ritto et al., 2011). In addition to the balanced truncation method, the modal truncation method is also a widespread reduction method. Modal truncation and modal superposition methods are used together in structural dynamic analysis (Rayleigh, 1896; Craig and Kurdila, 2006). In recent years, many methods have been proposed to improve the accuracy and efficiency of the modal truncation method, such as mode acceleration (Wilson et al., 1982). The state residualization method is another model reduction method based on singular perturbation approximation (Benner et al., 2000). The model reduction methods described above are all based on singular value decomposition. There are additional model reduction methods based on Krylov, which are different from the methods based on singular perturbation approximation (Antoulas et al., 2001). More and more scholars (Gugercin et al., 2003; Gallivan et al., 2004; Antoulas, 2005; Gugercin, 2008; Komarasamy et al., 2012) are researching how to combine the Krylov-based methods and the singular value decomposition-based method to get a novel model reduction method. However, due to manufacturing errors, modeling errors, measurement errors as well as other factors, the parameters of the state-space model are generally inexact. Therefore, the dynamic behaviors of the systems are also uncertain. A model reduction method that is able to consider the influences of those uncertainties, should be studied further. That is, the reduced-order model obtained by a model reduction method considering the uncertainties should not only characterize the nominal value of the dynamic behaviors of the original model, but also represent the uncertainties of the dynamic behaviors.
Few papers on model reduction technology considering the uncertainties of the high-order model have been studied. Qiu et al. (1996) proposed an approximate method for solving the eigenvalue problem of interval matrix, which can be used in the modal superposition method, which is a popular method for dealing with structural dynamic problems. In this method, only the first few modes that make much greater contributions to the responses were taken into account. Thus modal superposition method is also a kind of model reduction technology (Wilson et al., 1982; Craig and Kurdila, 2006). Based on a linear fractional transformation, a model reduction method for a multidimensional uncertain system was proposed by Beck et al. (1996). A framework for Routh-Pade approximation of an interval system was proposed by Bandyopadhyay et al. (1994) in the frequency domain based on interval arithmetic. Dolgin and Zeheb (2005) proposed an approximate method based on Chebyshev for a complex model with interval parameters. In Wu and Jaramillo (2002), model reduction problems with multidimensional uncertainties were solved.
In this paper, based on the balanced truncation method, a model reduction strategy considering the uncertainties of the original system is proposed. In order to evaluate the quality of the reduced-order model, the interval perturbation method for solving the eigenvalue problem of the interval matrix is presented. The organization of the rest of the paper is as follows. In Section 2, based on balanced truncation methodology, a model reduction method for a system with interval uncertainties is proposed. In Section 3, the calculation method for the dynamic responses of the interval systems is proposed to compare the reduced-order model and the original model. Three numerical simulations are given to demonstrate the validity of the presented model reduction technique in Section 4 and the paper is concluded in Section5.
2. Balanced-based model reduction of uncertain systems with interval parameters
A generalization of the balanced-based model reduction strategy is proposed for complex systems with interval uncertainties. The closeness of the original model and the reduced-order model is quantified by the upper bounds of the
2.1. The decomposition of the system matrix with interval parameters
For the stability analysis in engineering, the matrices of a system can be expressed as a linear function of the system parameters
Due to the complexity of the actual engineering systems, the uncertainties are often involved in the parameters of the systems. The traditional approaches to dealing with uncertain problems are the probabilistic method and fuzzy-sets-based technique. Both methods require sufficient information to identify the probability density function or membership function. However, in practical engineering, it is expensive and time-consuming to achieve this information. To overcome the disadvantages of the probabilistic method and the fuzzy set method, interval analysis was developed based on interval mathematics. The advantages of the interval method are that only the bounds of the uncertain variables are required, instead of the probability density function or the membership function.
In this paper, considering that the actual situation where available information of the system parameters

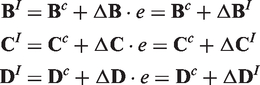
The system matrices

The system matrices
2.2. Balanced truncation of uncertain system
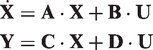
Consider the following state-space model:

Because there is not enough data to determine the probability density function or membership function, we assume that the uncertain parameter


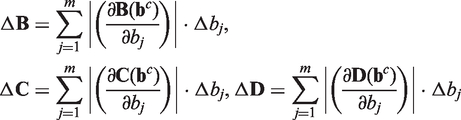
Expanding the state matrix
With the help of first-order Taylor series expansion, the system matrix can be approximately expressed as equation (13). When the uncertainties of the parameters are small, the above conclusion is appropriate. However, when the uncertainties are large, this method will no longer be suitable. In this case, the second-order terms in equation (13) should be considered. That is, the method proposed in this paper is limited to the case where the uncertainties of the parameters are small. Based on the interval natural extension principle, equation (13) can be written as follows:

Similar expressions exist for the other system matrices
Assume

Then, the system with uncertainties can be rewritten as follows:

Let
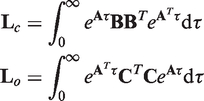
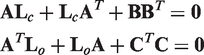
Readers are encouraged to consult a basic text on the concept of infinite Gramians such as Approximation of Large-scale Dynamical Systems (Antoulas, 2005) for a more detailed understanding. Because

Substituting equation (20) into equation (19) yields
Expanding equation (21), and neglecting the high-order terms yields
Rearrangement of equation (23) yields the equations:
Noticeably, the nominal Gramians

Finding a transformation matrix


After transformation, the system matrices of the balanced system with interval uncertainties can be obtained as follows:

Thus, the balanced system
In order to achieve the objective of reducing the order, some state variables need to be eliminated. Considering the characteristics of the balanced model, it is known that the state variables are sorted according to the influence on the input-output behavior. Thus, portioning the state vector

Then, a reduced-order model with interval uncertainties of order k can be obtained as follows
As can be seen from the above equation, the system matrices of the reduced-order model are interval matrices rather than deterministic matrices. The reduced-order model with interval uncertainties can be used to analyze the robustness of the original system. However, the reduced-order model obtained by conventional model reduction technologies cannot meet this requirement.
2.3. The error bound of reduced-order model with interval uncertainties
Antoulas (2005) has demonstrated that the quality of the reduced-order model obtained by balanced truncation can be determined by the

Because the model reduction method proposed in the previous section for a system with interval uncertainties is based on the balanced truncation, equation (32) can also be used to measure the quality of the reduced-order model, but the neglected Hankel singular values are interval numbers. Thus, in order to assess the quality of the reduced-order model, we should first calculate the intervals of the discarded Hankel singular values. In the previous section, the Gramians

Using the interval algorithm,
Assume


Qiu et al. had proved that the interval perturbation algorithm requires minimal computational effort compared with Deif’s solution (Deif, 1991). Then, the interval bounds of the Hankel singular values will be

Therefore, the error bound of the reduced-order model with interval uncertainties is

The error bound confirms that a good reduction will be taken when the upper bounds of the Hankel singular values which are neglected
Based on balanced truncation, a model reduction method for complex systems with interval uncertainties is proposed. The reduced-order model obtained by this method can hold the stability of the original model and the error bound of the reduced-order model can be obtained by using the upper bounds of the neglected Hankel singular values. In order to compare the original model and the reduced-order model, dynamic responses of the reduced-order model and the original model are selected as an intuitive criterion. By comparing the upper and lower bounds of the dynamic responses of the original and reduced-order model, we can evaluate the quality of the proposed method in this paper. Thus, an algorithm to get the responses of the interval system will be introduced in the next section.
3. Dynamic response of system with interval uncertainties
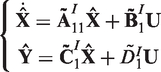
Consider the interval state-space model as follows (Chen, 2004):


In general, finding out the complex response set is very difficult and not necessary. In order to reduce the amount of computation, we just need to find an interval vector containing the response set. That is, we need to find out the upper and lower bounds of the dynamic response.


Assuming that

Assume that the solution

Substituting equation (45) into equation (44) yields

Expanding equation (46) and neglecting the higher-order terms yields


Then, the upper bounds and the lower bounds of the solution to equation (40) can be obtained:
4. Numerical examples
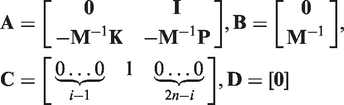
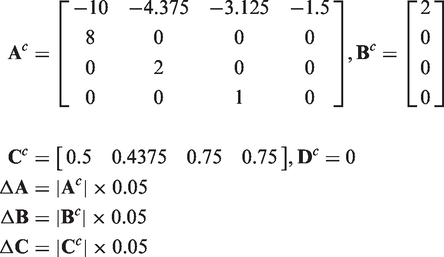
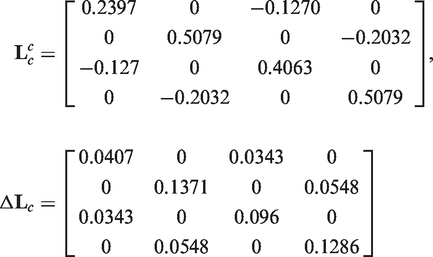
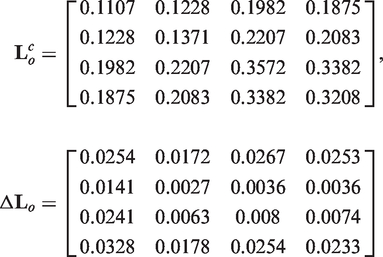
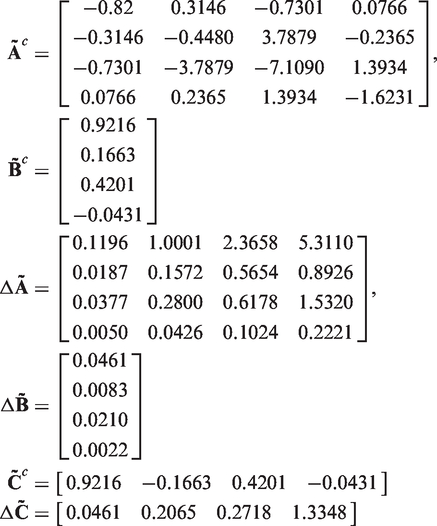
In this section, the proposed method is applied to three numerical simulations and the results are discussed later. Consider a fourth-order single-input-single-output linear time-invariant system with a state-space realization The reachability Gramian Using equation (28) and interval mathematics, the balanced system with interval uncertainties can be obtained
Interval eigenvalues of the original system with interval parameters.Example 1
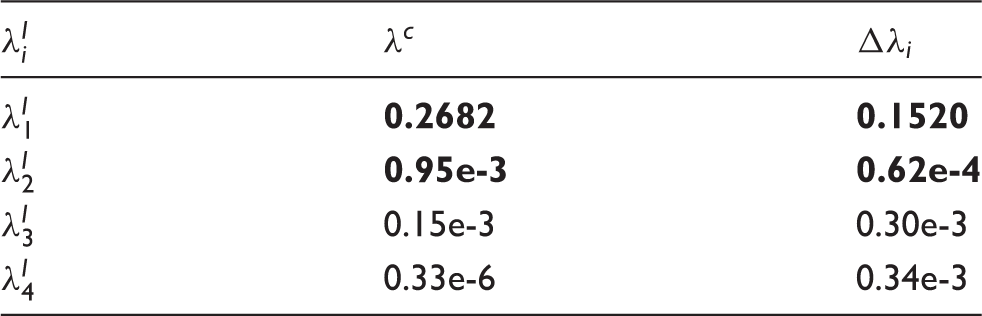
In order to compare the complex model and the reduced-order model, the input
As can be seen from Figure 1, the response of the reduction-order model (order 2) is a good reproduction of the original system (order 4) response. Ignoring the uncertainties, we can also get the above result using the conventional balanced truncation method. This shows that the proposed method can be degraded to the traditional method of balanced truncation.
The nominal output of the original system and reduced-order system (reduction from order 4 to order 2).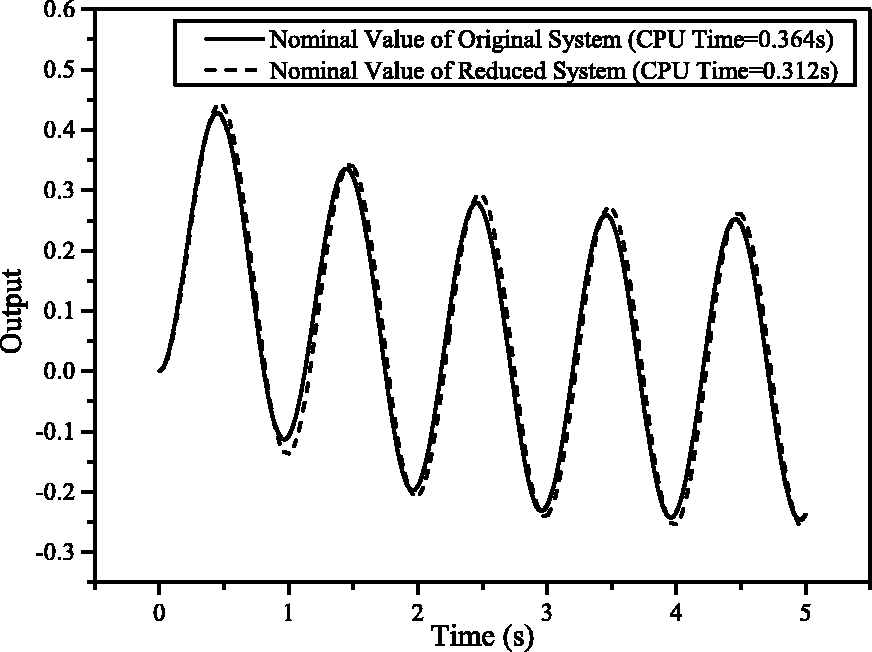
Figure 2 gives the details of responses of the complex model and the reduced model. Qualitatively, we can conclude that the reduced-order model closely tracks the pattern of the original model. As shown in Figure 2, the proposed method in this paper can get both the nominal response of the original model and the ranges of response of the complex model.
The bounds of responses of the original system and reduced-order system (reduction from order 4 to order 2).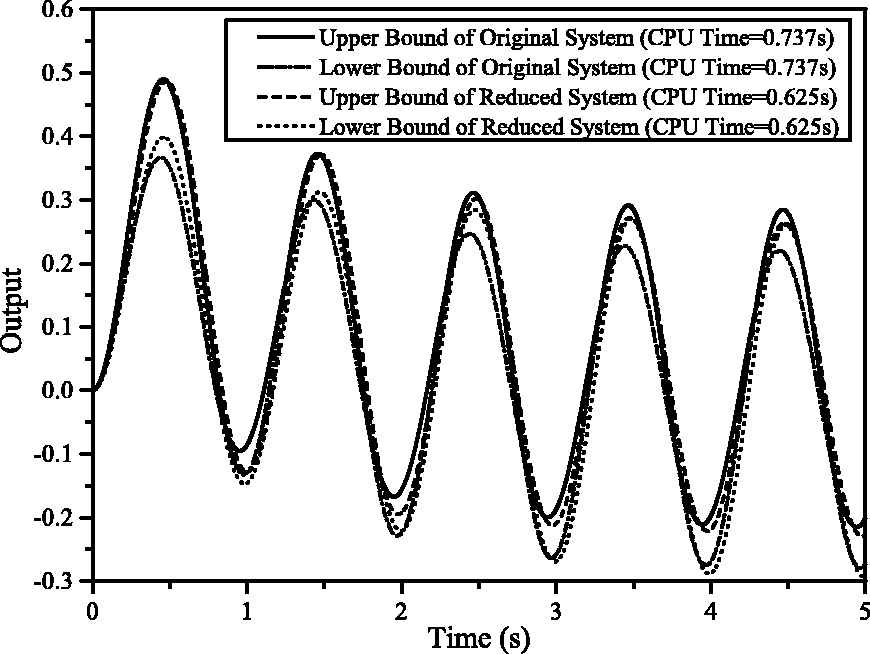
Example 2
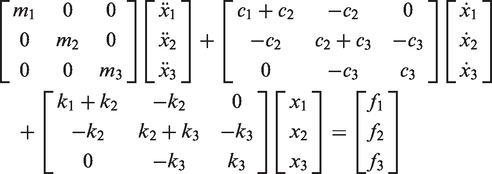
Considering the following mass-spring-damper vibration system shown in Figure 3, we assume that the mass, stiffness and damping are all uncertain quantities. Assume that there is one sinusoidal excitation The three-degrees-of-freedom system (mass-spring-damper vibration system).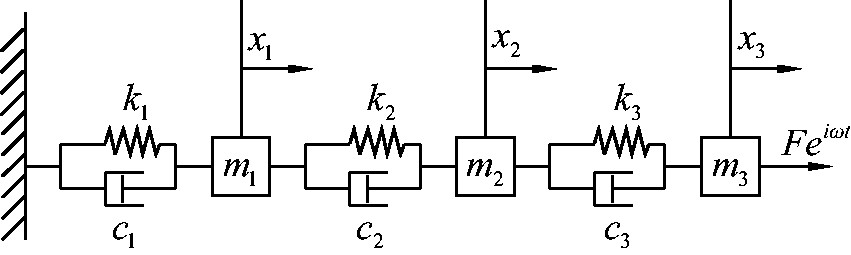
Applying the Lagrange equation, the mathematical model of the system in Figure 3 is
Interval eigenvalues of the original system with interval parameters.
The nominal horizontal displacement of m3 of the original model and the reduced-order model are shown in Figure 4. As can be seen, even without considering the uncertainties, the reduced-order model can give a high-quality estimate of the original model. A comparison between the complex model and the reduced-order model with interval uncertainties is given in Figure 5. It shows that the reduced model can not only track the nominal response of the complex model, but also the response ranges of the complex model with a small deal of computational efforts. The reduced-order model with uncertainties will be appropriate when the uncertainties of the original model need to be considered, such as stability analysis, robustness analysis or reliability analysis.
The nominal displacement of m3 of the original system and reduced system (reduction from order 6 to order 2). The bounds of the displacement of the original system and reduced system (reduction from order 6 to order 2).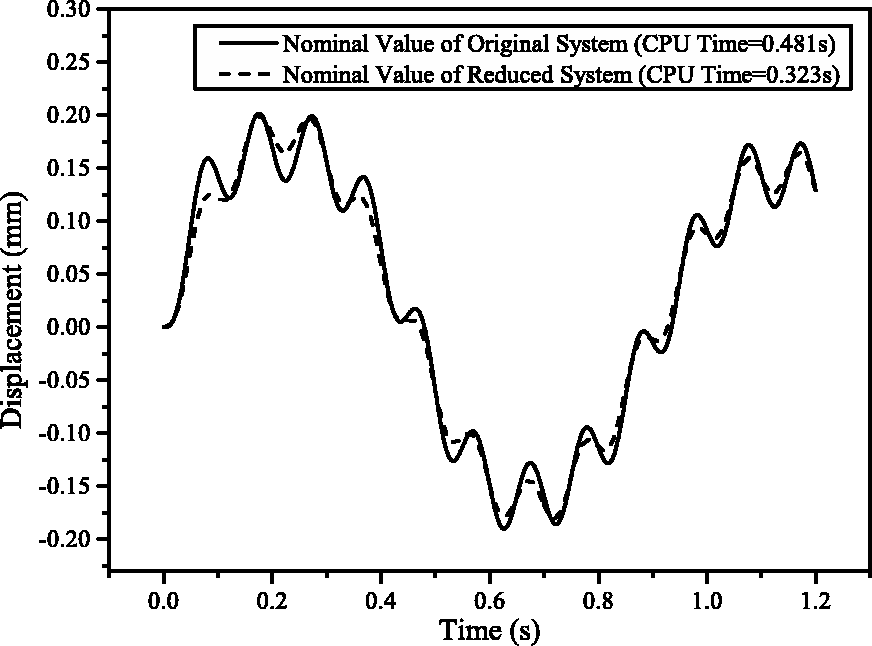

Example 3
In order to demonstrate the applicability of the model reduction method proposed in this paper for the engineering system with uncertainties, we apply this model reduction method to a two-dimensional truss structure shown in Figure 6. The material properties are as follows: Young’s modulus A seven-bar two-dimensional truss.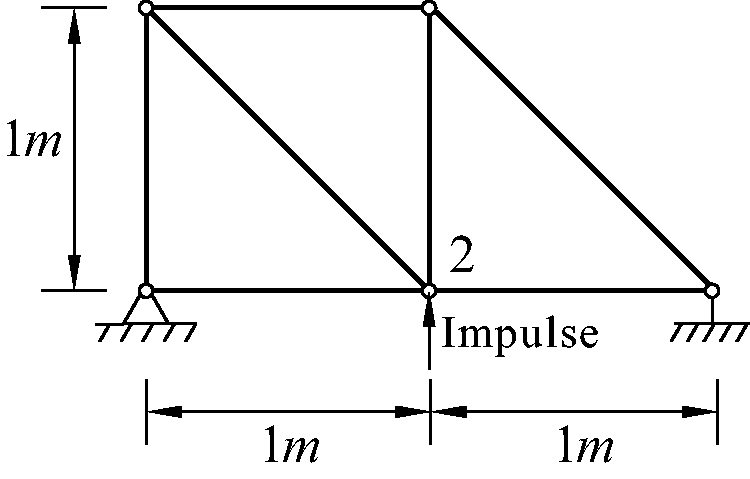
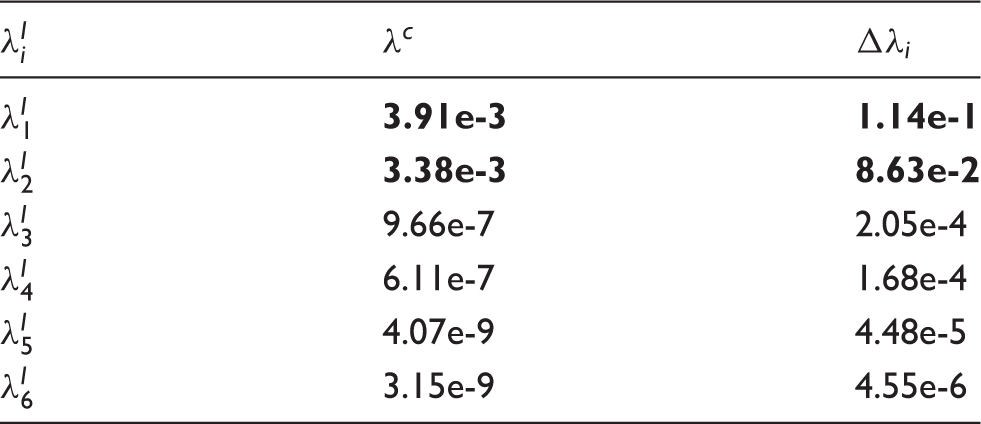
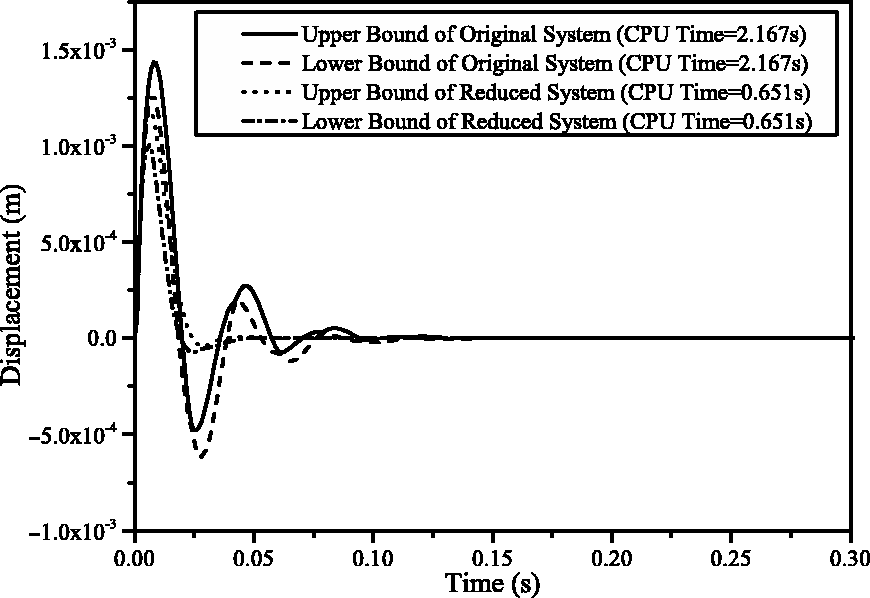
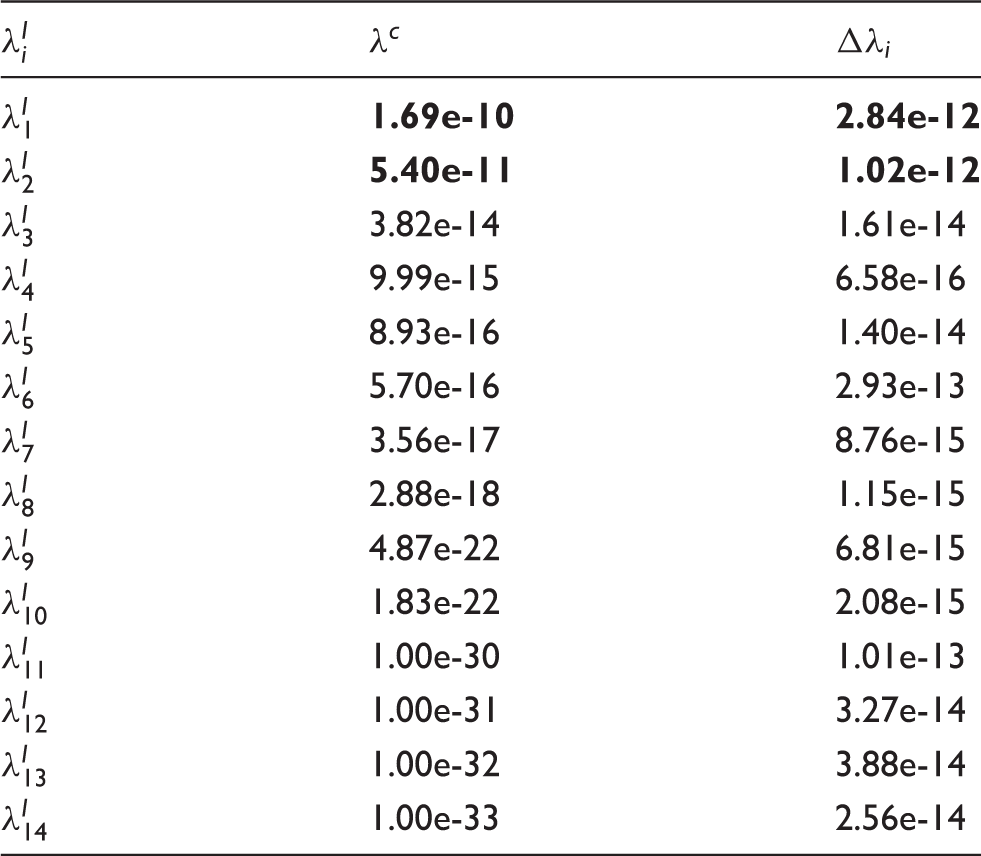
Table 3 shows that the first two eigenvalues are much larger than the other 12 eigenvalues. The reduced-order model is derived by deleting the third ∼14th state variables. The nominal values of the dynamic responses of the original model and the reduced-order model of the seven-bar two-dimensional truss are shown in Figure 7. The bounds of the displacement of Node 2 are shown in Figure 8. Qualitatively, we conclude that the reduced-order model reproduces the original model well, and the proposed model reduction method in this paper is also feasible for practical engineering problems.
The nominal displacement of Node 2 of the original system and reduced system (reduction from order 14 to order 2). The bounds of the displacement of Node 2 (reduction from order 14 to order 2). Interval eigenvalues of the original system with interval parameters.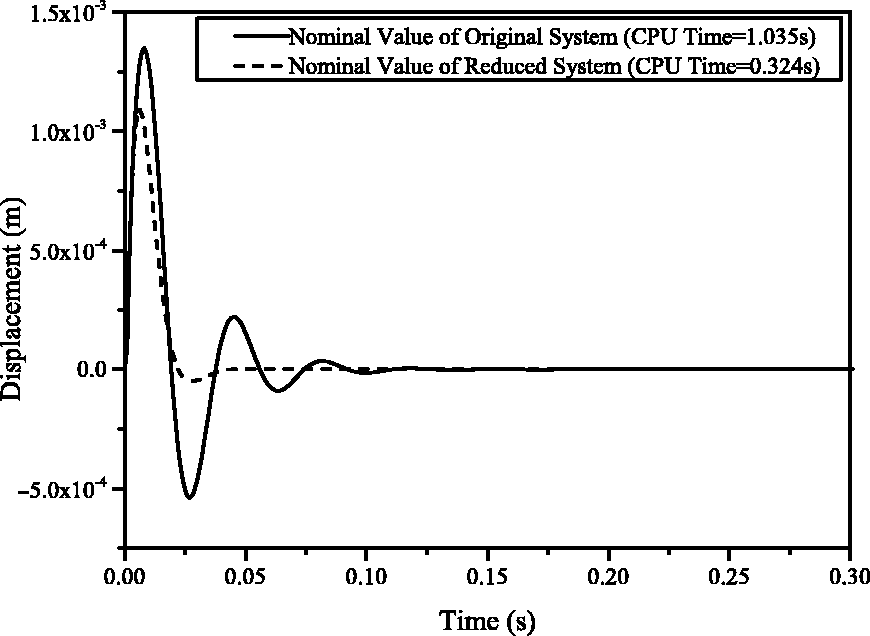
5. Conclusion
Based on interval arithmetic, a model reduction method for complex models with interval uncertainties was proposed. By using the interval perturbation method, the upper bounds of the Hankel singular values of the uncertain system, which can be used to assess the quality of the reduced-order model, were derived. In order to give an intuitive evaluation of the quality of the reduced-order model, the matrix perturbation method was adopted to calculate the bounds of the dynamic response of the original model and the reduced-order model. The difference between the model reduction method proposed in this paper and conventional methods is that the coefficients of the obtained reduced-order model are interval numbers instead of fixed numbers. This method is useful when the uncertainties of original systems must be considered, such as robustness analysis, reliability analysis and stability analysis. The results of numerical examples showed that the proposed model reduction method could lead to a significant reduction in the computation time and guarantee precision. As a future research direction, other model reduction methods would be extended to complex models with uncertainties.
Footnotes
Acknowledgements
The authors would like to thank their funding bodies.
Funding
This work was supported by the National Nature Science Foundation of China (grant number 11372025), Defense Industrial Technology Development Program (grant numbers B2120110011 and JCKY2013601B), and the Aeronautical Science Foundation of China (grant number A2012ZA51010).