
Abstract
This paper presents a design, development and experimental verification of an active vibration control system of aluminum plate. The active structure consists of an aluminum rectangular plate as the host structure, strain gages as the sensor element and a piezoceramic patch as the actuation element. Based on characteristics of the integrated elements with use of the fuzzy optimization strategy based on the pseudogoal function the optimal orientation of piezoelectric actuator is found, and the whole active vibration control system is designed and developed. The active vibration control system is controlled by proportional-integral-derivative (PID) control strategy. Control algorithm was implemented on the PIC32MX440F256H microcontroller platform. In order to prevent it from negative occurrences from derivative and integral terms in a PID controller, the first-order low-pass filters are implemented in the derivative action and in the feedback of integral action. The experiment considers active damping control under periodic excitation. Experiments are conducted to verify the effectiveness of the vibration suppression and to compare the damping effect with different adjustment of PID gains. Experimental results corresponding to the developed active vibration control system are presented. The system suppresses more than 90% of vibration amplitude, which confirms the high level of effectiveness in vibration active damping at the proposed active structure.
1. Introduction
The presence of vibrations is a common problem in mechanical structures, particularly in flexible parts, for the space industry, where large, lightly damped, flexible structures characterized by closely spaced modes and low natural frequencies are common. This can be reduced by making parts with high stiffness characteristics. For many applications, e.g. in aircrafts and spacecrafts, it is desirable to keep the weight as low as possible, which makes such solutions less suitable. In order to improve the performances of light structure, the best solution is the system of active vibration control. In the case when such a system is embedded in the structure it is often referred to as an active structure.
An active structure consists of a host structure incorporated with sensors and actuators coordinated by a controller. The integrated structure includes some vibration modes of the structure whose dynamic response must be considered. If the set of actuators and sensors are located at discrete points of the structure, they can be treated separately (Preumont, 2002).
Depending on the integrated sensor, the vibration can be controlled by different control strategies. The design methodology for active control has been presented by Benning et al. (1997), who discussed and proposed the actuation concept, alternate control algorithm and an approach to the problem solving. In the design process section, these authors explored actuators and their technologies, controller hardware and software, and sensors to be integrated effectively into the system. Yildrim (2004) presented a simulation study with comparison between proportional-integral-derivative (PID), proportional-integral (PI) and proportional-derivative (PD) controllers with the proposed neural network schemes applied to a suspension system. He showed that the proposed scheme can guarantee the stability of the adaptive system in the presence of modeling uncertainties.
Active vibration control (Khot et al., 2012) of a cantilever beam has been demonstrated by using a piezoelectric sensor/actuator and a PID-based output feedback controller. Model reduction was performed and responses of full and reduced models were compared, whicvh matched closely. The models of the beam were obtained and then used to design a PID-based output feedback controller in SIMULINK©. The PID controller is widely used in many control applications because of its simplicity and effectiveness. Its disadvantage is its poor capacity in dealing with system uncertainty, i.e., parameter variations and external disturbance (Tai and Ahn, 2011). Gosiewski and Koszewnik (2013) presented a fast prototyping method for the active vibration control system of 3D mechanical structures. The mathematical model was developed, reduced and decoupled to change the two input two output (TITO) system into two single input single output (SISO) systems. Such an approach allowed simple control laws to be designed with the aid of a computer simulation procedure. Experiments on the active vibration control system were conducted with local PD controllers and the results proved that these PD controllers work well at increasing the damping level.
Reviewing the available articles on the active vibration control of flexible structures (Kerber et al., 2007; Metin et al., 2011; Iwamoto et al., 2012) shows that, to the best of our knowledge, no study has been reported on the detailed active structures’ development process with a PID controller, strain gages such as a sensor and PZT material for actuation. In this paper the development process of an active vibration control system is presented. The sensor is 120 Ω Wheatstone “full bridge” (strain gages) platform. The actuator is a one-layer PZT fiber reinforced actuator. Optimization of the orientation of the piezoelectric actuator on the clamp-free-free-free (CFFF) aluminum plate was performed using the fuzzy optimization strategy (Kwak and Heo, 2007; Zorić et al., 2012). A control PID algorithm is implemented on “PIC32-PINGUINO-OTG” board, with integrated PIC32MX440F256H microcontroller (Jovanović et al., 2013). The vibration suppression efficiency of the developed system was verified experimentally on active plate with periodic excitation at the eccentricity pulley.
2. Mathematical modeling
Mathematical modeling considers a flexible plate with integrated piezoelectric actuators. From the finite element model based on the third-order shear deformation theory (Zorić et al., 2013), the equations of motions can be written as follows:

From equation (1), the following equation of motion can be obtained:








3. Active vibration control system design
In this section, the elements and their incorporation on structure (aluminum plate) for active vibration control application are presented. For the sensor platform the 120 Ω Wheatstone “full bridge” (strain gages), one-layer PZT bonding for actuator and PID control laws strategy have been chosen. Control strategy provides feedback control laws that assume full information of the state of the model. The proposed designs provide a measure of the best achievable performance for the class of feedback compensators.
3.1. Sensor platform
The Wheatstone bridge is usually used to measure the deformation of mechanical systems. The four arms of the bridge circuit are formed by the resistances R1 to R4 (Figure 1(a)). The integrated sensor platform is given in Figure 1(b).
The Wheatstone “full bridge” strain gages circuit: (a) block scheme; (b) integrated strain gages.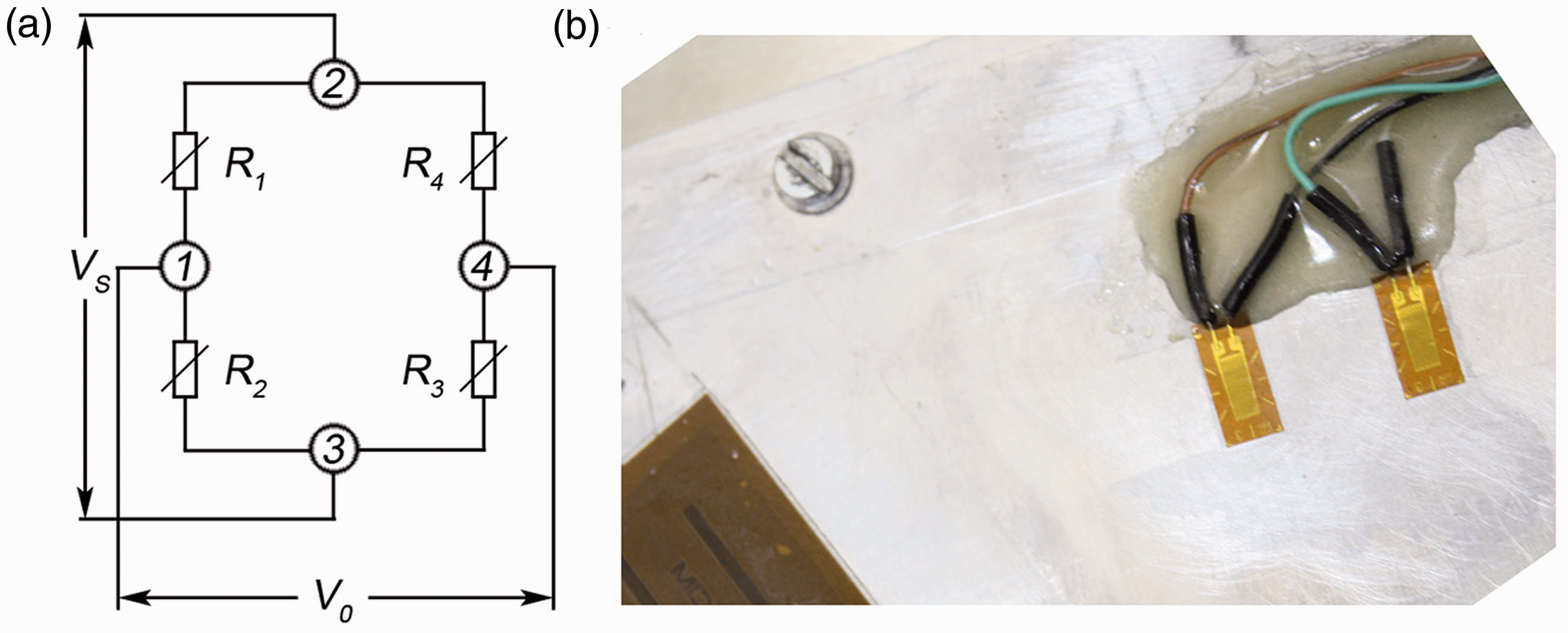
The corner points 2 and 3 of the bridge designate the connections for the bridge excitation voltage (
The full bridge sensor platform has the following advantages (Hoffman, 1989):
– With a mirror-imaged cross-section, normal strains are compensated. – Thermal strains are compensated to a high degree. – Interference effects through internal bridge connections are largely suppressed. – The change in AC voltage level is suitable for measuring the signal of vibration.
The disadvantage of this type of sensor is its low output voltage level. This type of measurement must be considered in conjunction with the signal amplifier system. The signal amplifier’s primary task is to raise the level of the bridge circuit’s output signal
3.2. Optimal orientation of piezoelectric actuator
Controllability is the property of a system to control all states of a system. A structure is controllable if the integrated actuators suppress all structural modes of interests. The controllability of the whole system is a combination of controllability of individual modes. The controllability can be expressed quantitatively by using controllability Grammian matrix:

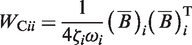

In this study, the cantilever aluminum plate (290 × 210 × 1 mm) is considered. Piezoelectric actuator MIDE QW10p for active vibration control is used. The location of the actuator at the plate is presented in Figure 2, thus the optimization problem is reduced to finding the optimal orientation of the actuator. The mechanical properties of the aluminum are given in Table 1.
Cantilever aluminum plate with piezoelectric actuator. Material properties of aluminum.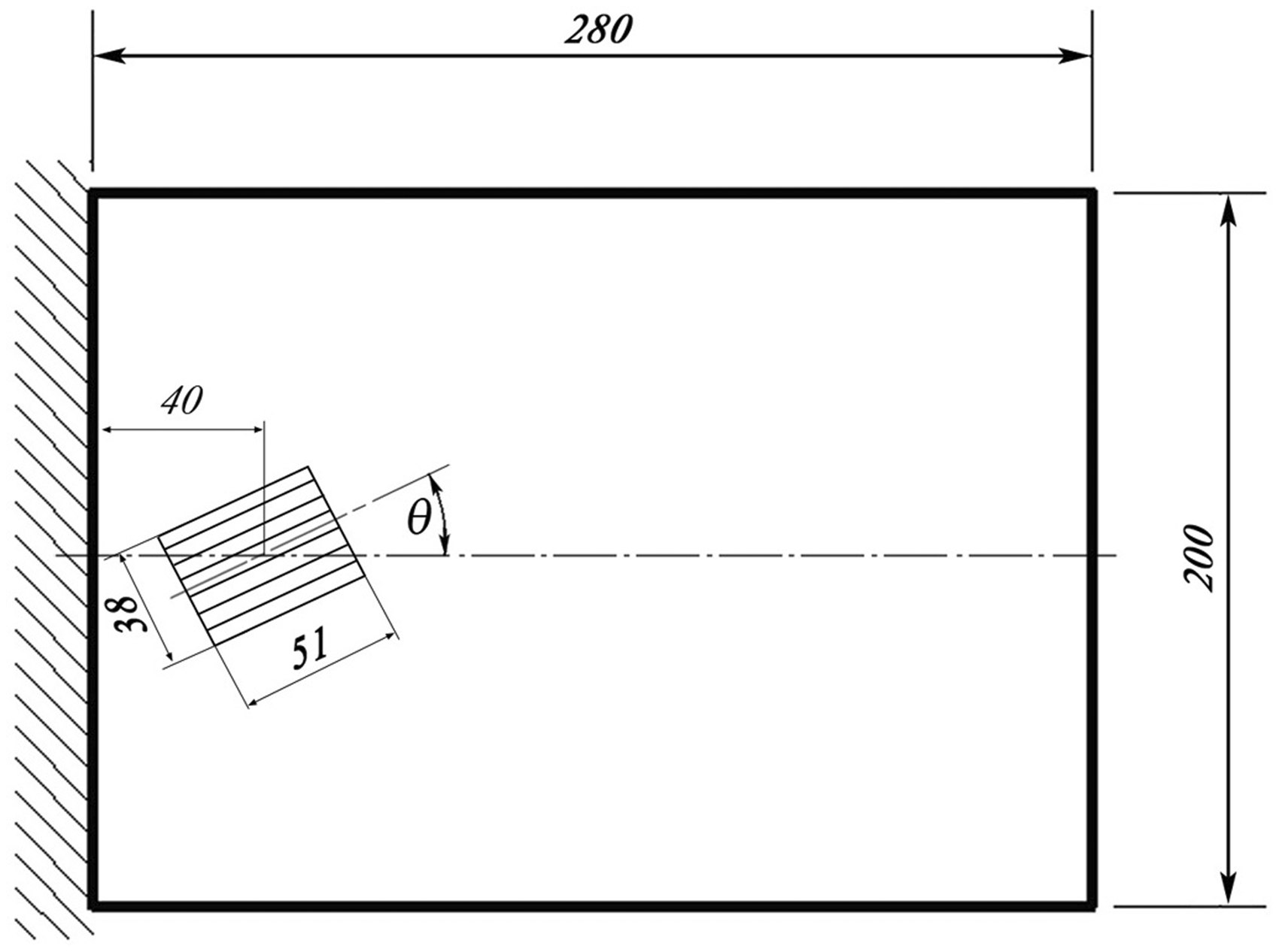
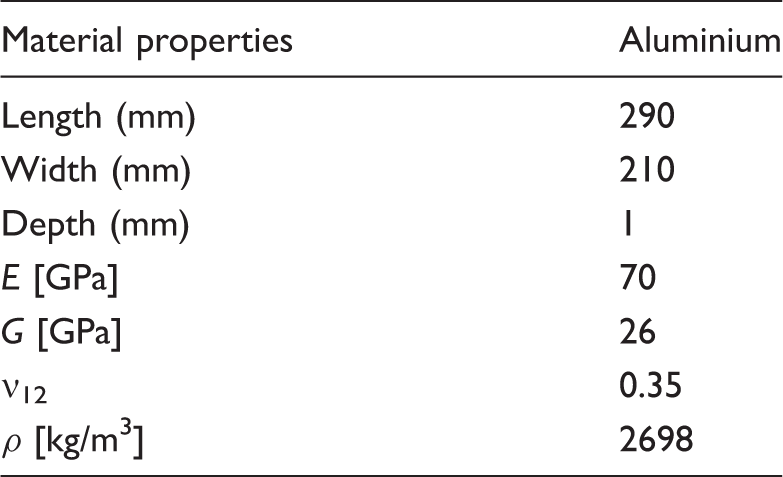
The controlled modes are the first three modes. Figure 3 presents eigenvalues of the controllability Grammian matrix for the first three modes versus orientation angle.
Eigenvalues of Grammian controllability matrix: (a) the first mode; (b) the second mode; (c) the third mode.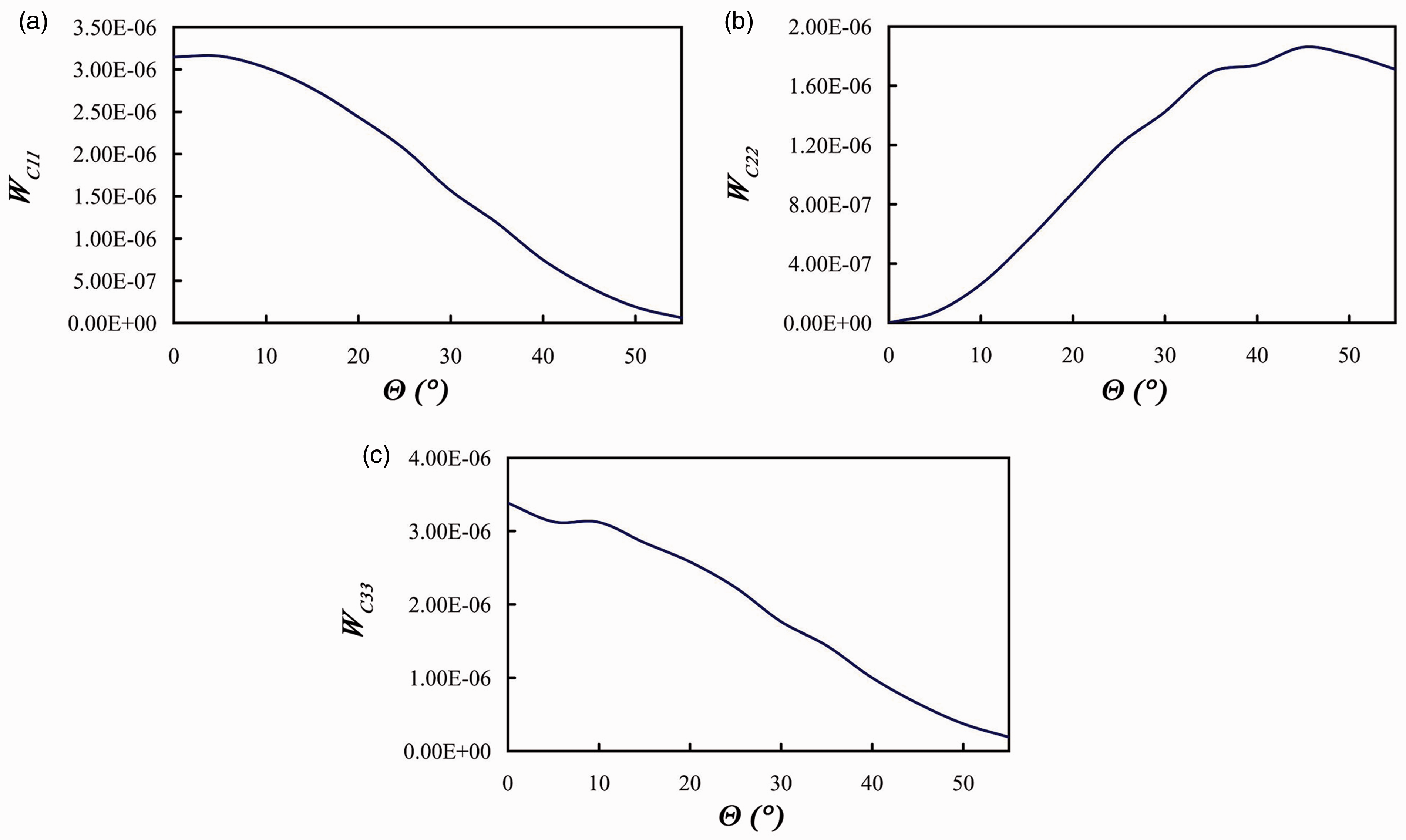
A fuzzy optimization approach based on the pseudogoal function for a multi-objective problem is proposed in Zorić et al. (2012). Objective functions (15) which have to be maximized, can be written as a pseudogoal function in the form of the fuzzy number:
Membership degrees for the first three modes versus orientation angle.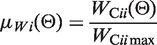


3.3. Design of controller architecture
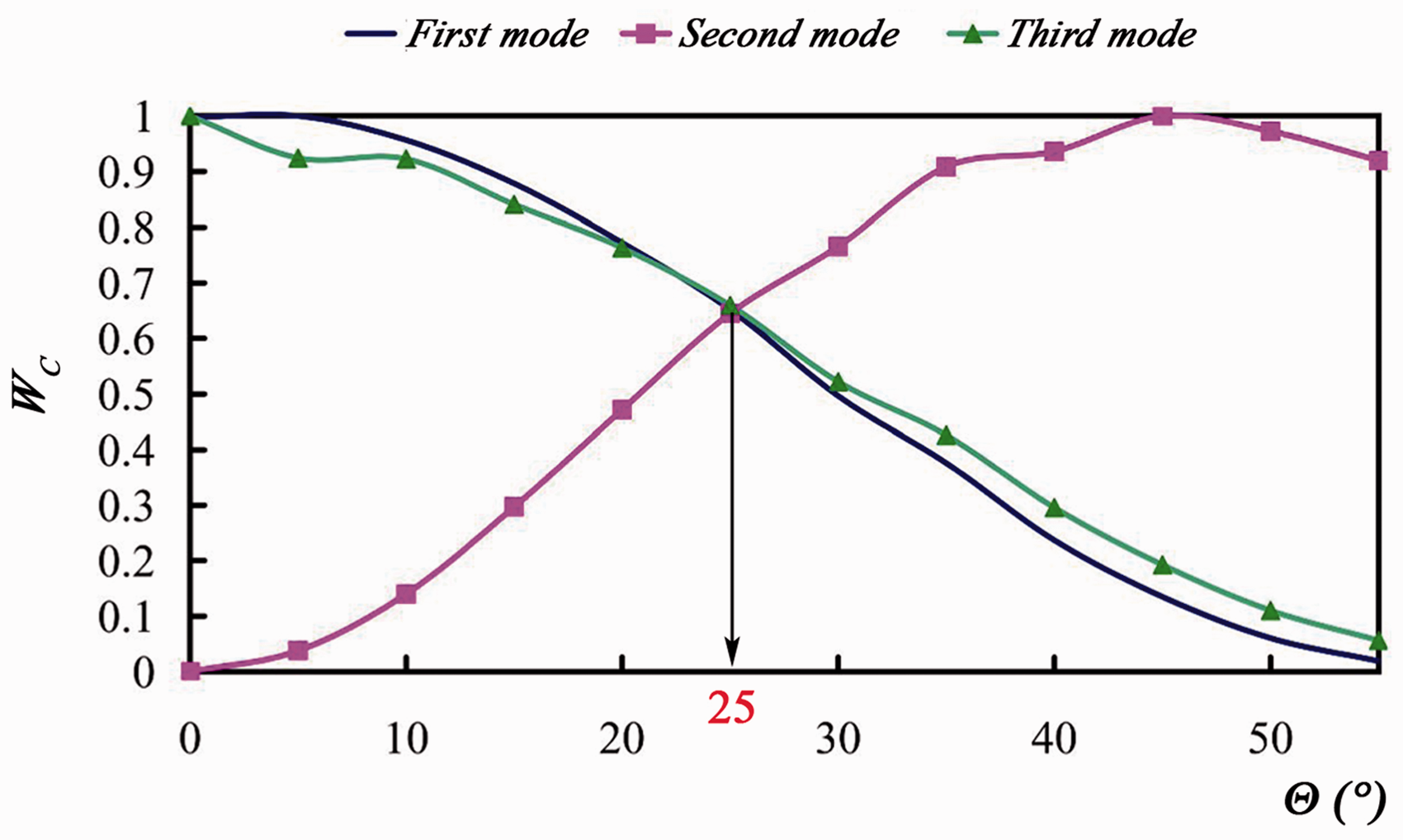
For control applications, the PID-based output feedback controller for actively controlling vibrations of the plate is chosen. The PID controller is the most common control algorithm due to its simplicity and robust performance. Most practical feedback loops are based on PID control or some minor variations of it. Figure 5(a) depicts the block diagram of a simplified PID controller in a closed-loop system.
(a) standard proportional-integral-derivative (PID) controller; (b) modified PID controller.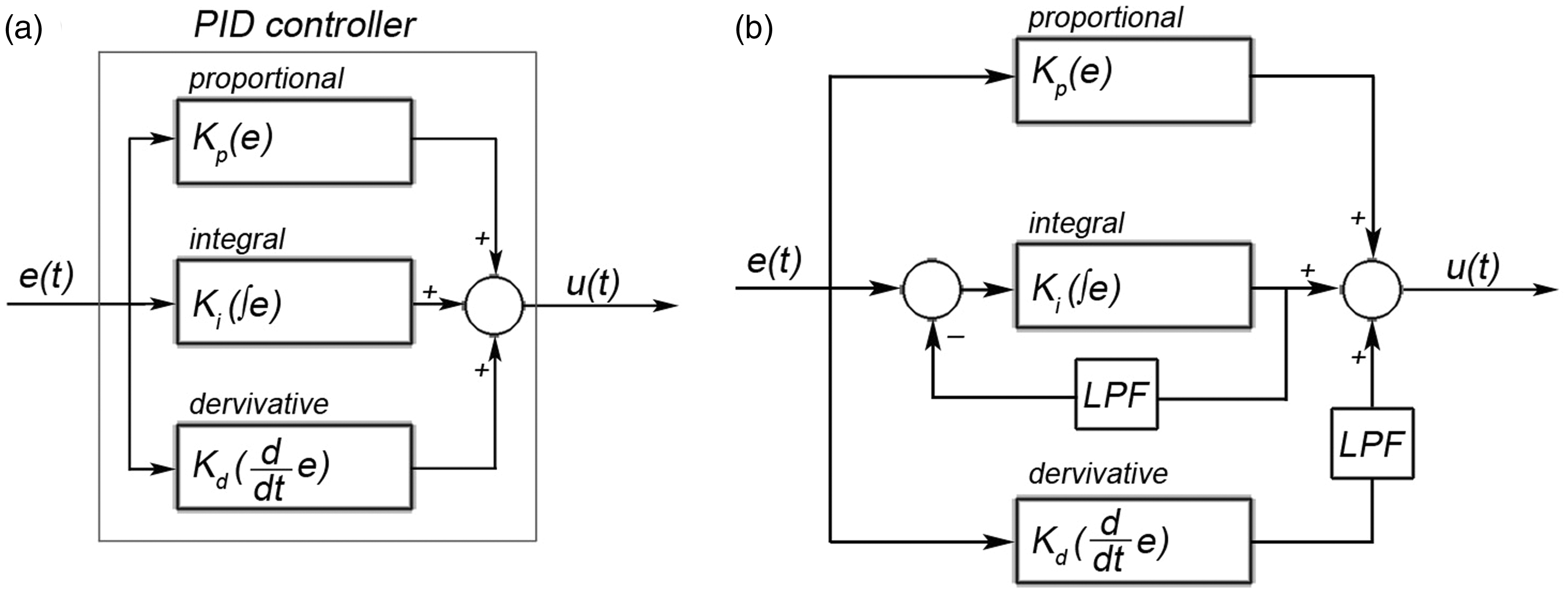
In the PID controller the proportional, integral, and derivative terms are summed to calculate the output of the controller. Defining

The variable
Equation (19) can also be parameterized as:

The transfer function of a PID controller is

The major disadvantage of the integral gain is that it is subject to integral windup or integral saturation. Integral windup is caused when there is a large error between the reference set-point value and the measured process. Active vibration control is the process where the error cannot be annulled and the integrator output becomes saturated. The saturation in integral action is presented in Figure 6, where control voltage is shown. Also, from Figure 6 signal noise can be seen, which is especially emphasized after the seventh second.
Control voltage of proportional-integral-derivative (PID) controller without low-pass filter.
In order to prevent the negative occurrences from derivative and integral terms in a PID controller, the authors propose two inventions on derivative and integral terms for the system of active vibration control. The high frequency noise can be neutralized using the first-order low-pass filter system. In order to prevent saturation in the integral action, the first-order low-pass filter is implemented in the feedback of integral action with the aim of the integrator’s output returning quickly to the proper level required for the new operating condition. After these two modifications, the authors have solved the system of active vibration control based on the PID control strategy. The block diagram of a modified PID controller in a closed-loop system is shown in Figure 5(b). Figure 7 presents control voltage of the modified PID controller and shows that saturation has been overcome.
Control voltage of modified proportional-integral-derivative (PID) controller.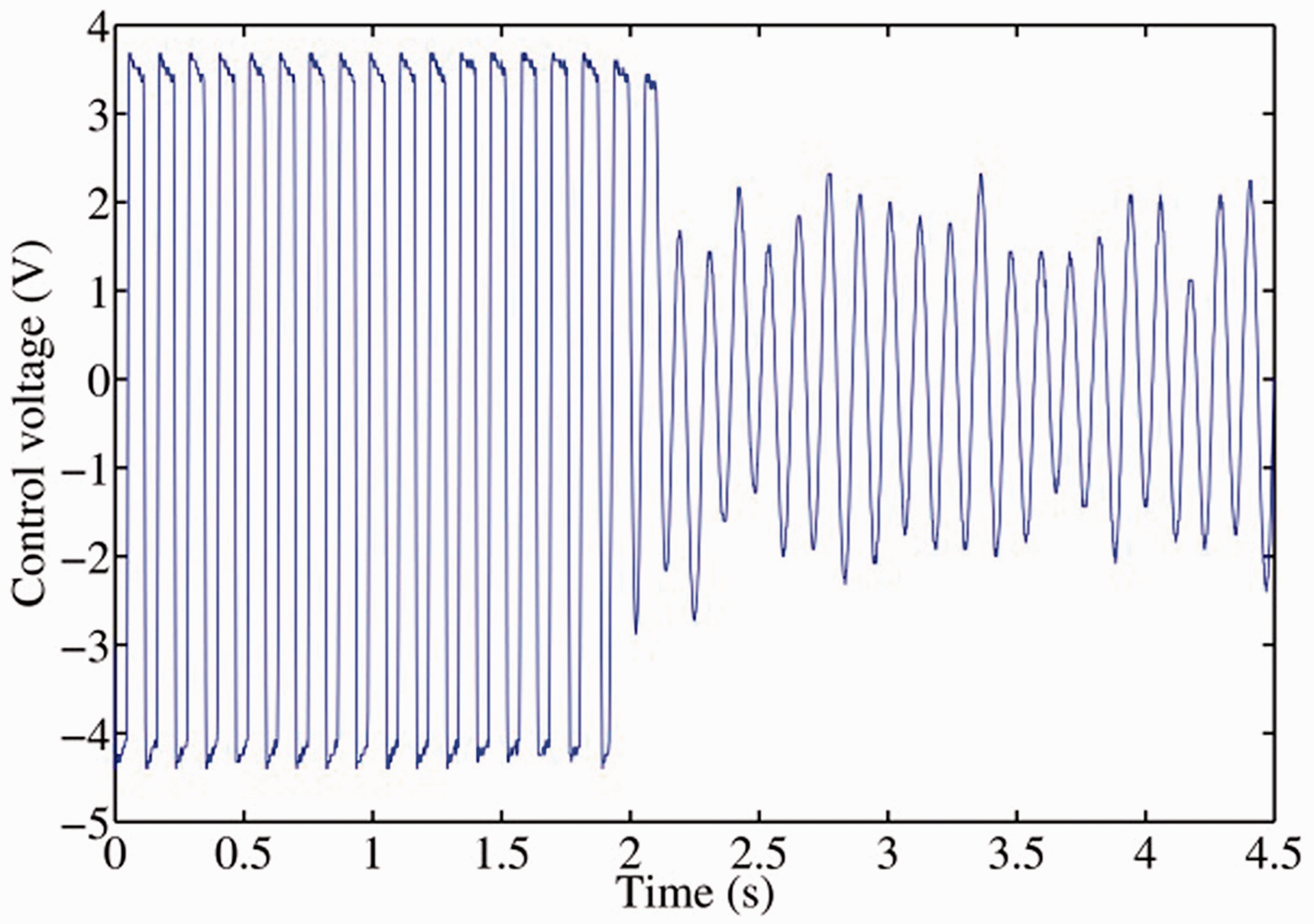
4. Developed active vibration control system
The active vibration control system was developed for active damping around the resonance frequencies. The system has four main subsystems: (a) control subsystem, (b) integrated structure, (c) high-voltage amplifier and (d) disturbance system. A schematic diagram of the designed system is depicted in Figure 8.
Active vibration control system block diagram.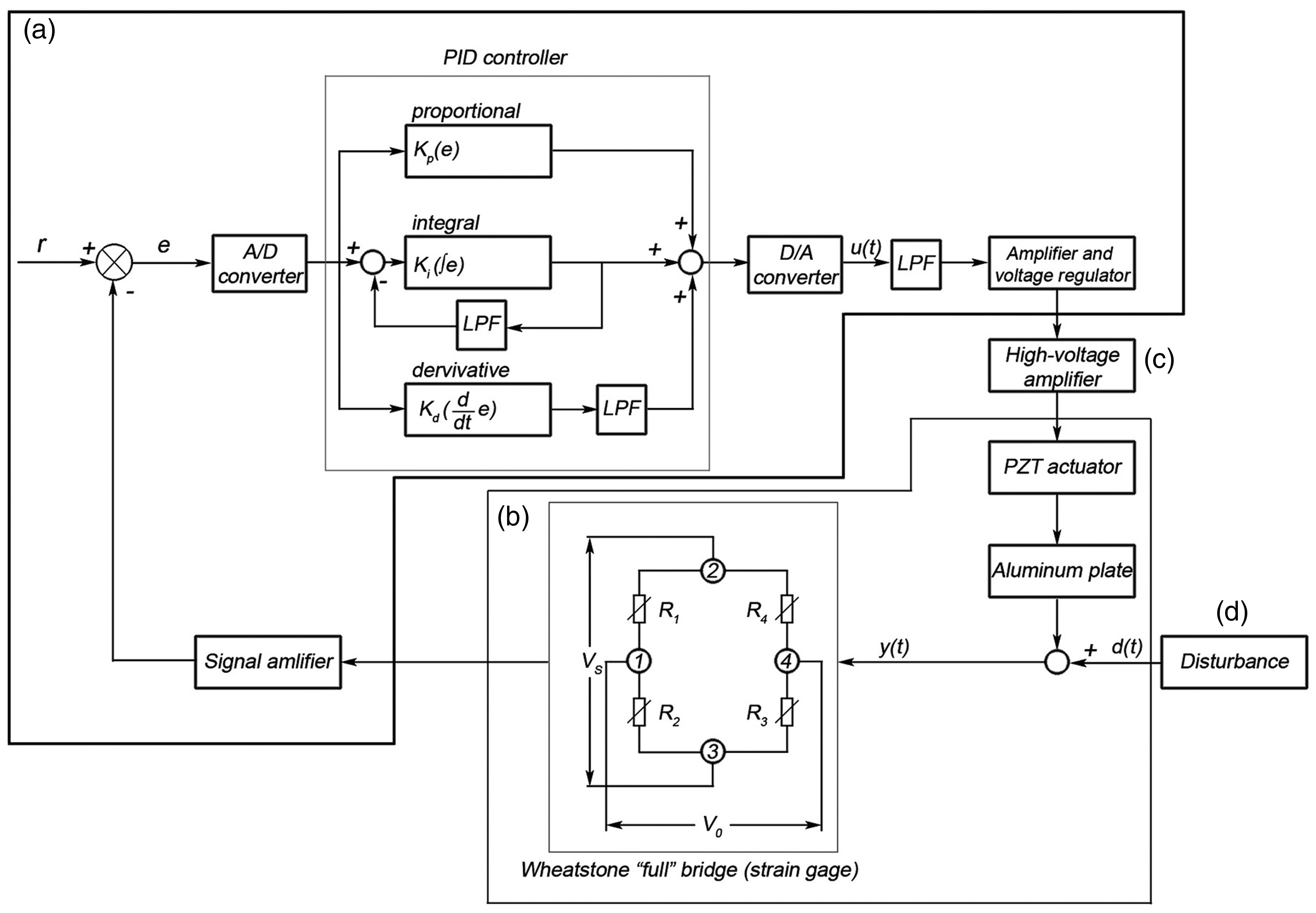
The disturbance system is at the free edge of the plate. Figure 9(a) depicts the integrated structure with the disturbance system. Periodic excitation is achieved by the electromotor with eccentric pulley, which is connected with a belt to a pulley mounted at the free edge of the plate. The disturbance system is developed with the possibility of including the influence of different mechanical conditions (misaligned and eccentric sheaves/pulley, worn belts). The frequency of periodic excitation is controlled by the change of electromotor voltage on signal generator Tektronix TM5006.
(a) the integrated structure with disturbance system; (b) controller and high voltage amplifier.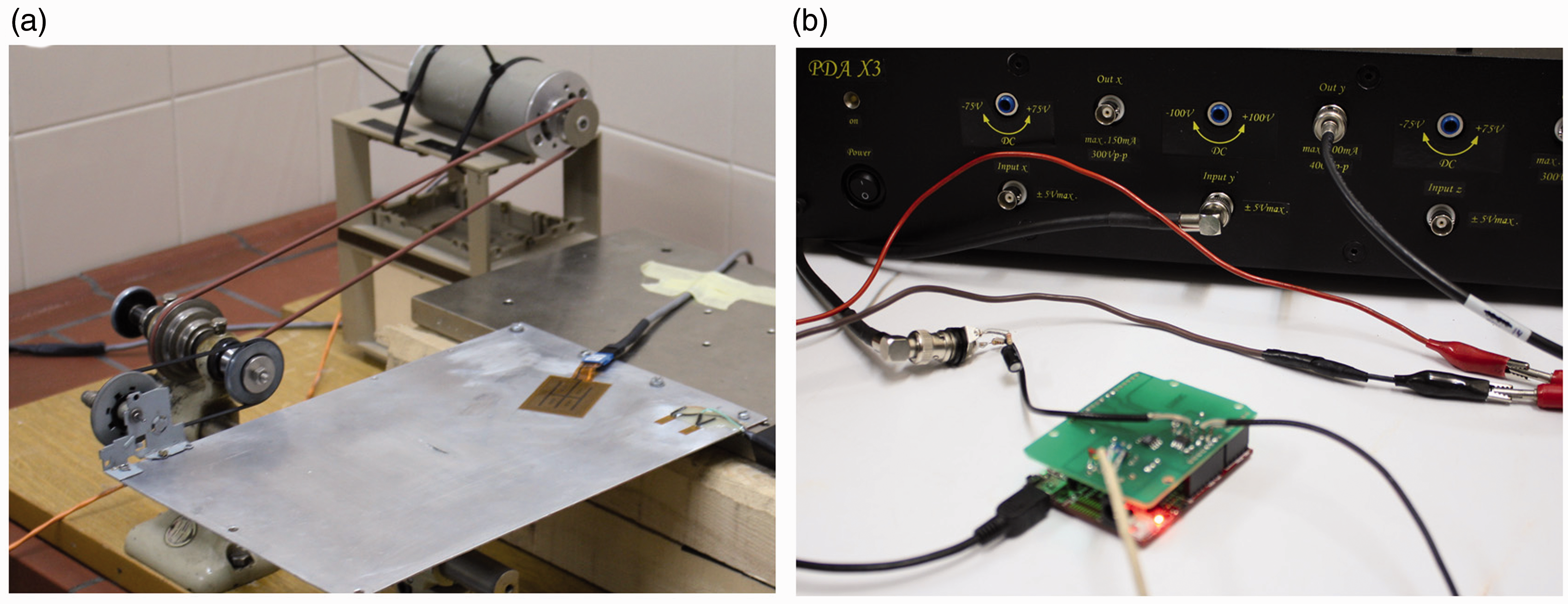
The Wheatstone “full” bridge (120 Ω strain gages) is used to detect the signal,
Figure 10 presents a schematic diagram of the vibration active damping experimental setup considered in this study.
Schematic diagram of experimental setup.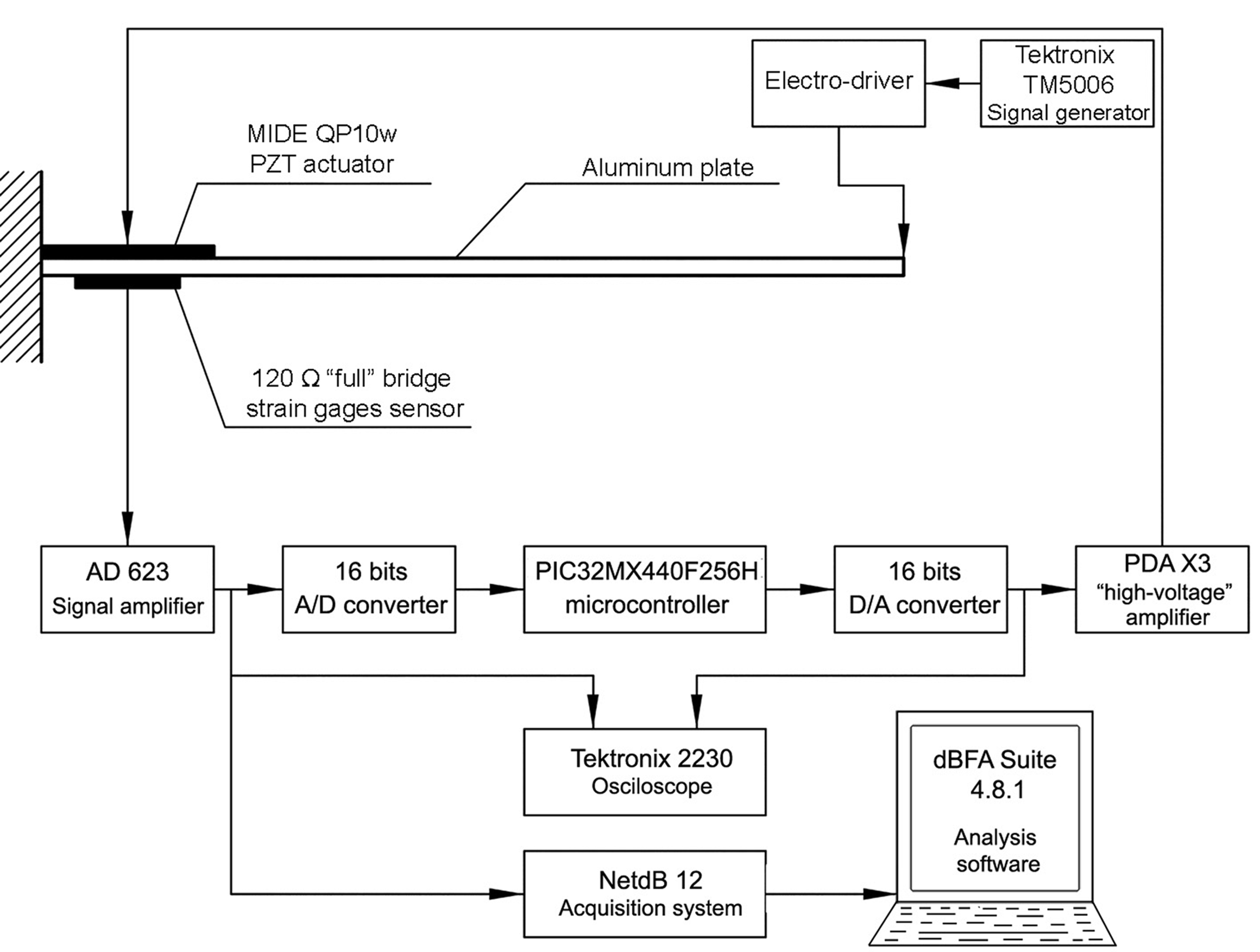
5. Results
In this section, the results of a thin aluminum plate vibration active damping system via a PID feedback controller are presented. The experimental results are given in time and frequency domains.
This section considers the case of periodic excitation on the first bending resonant frequency of the plate, which is 11.8 Hz.
Proportional, integral and derivative gains of the proposed PID are obtained by using the Ziegler-Nichols method, where the important step is the determination of critical gain (gain margin of the closed-loop system). The critical gain,
The transient period of active vibration control system: (a) time response for sensor output voltage
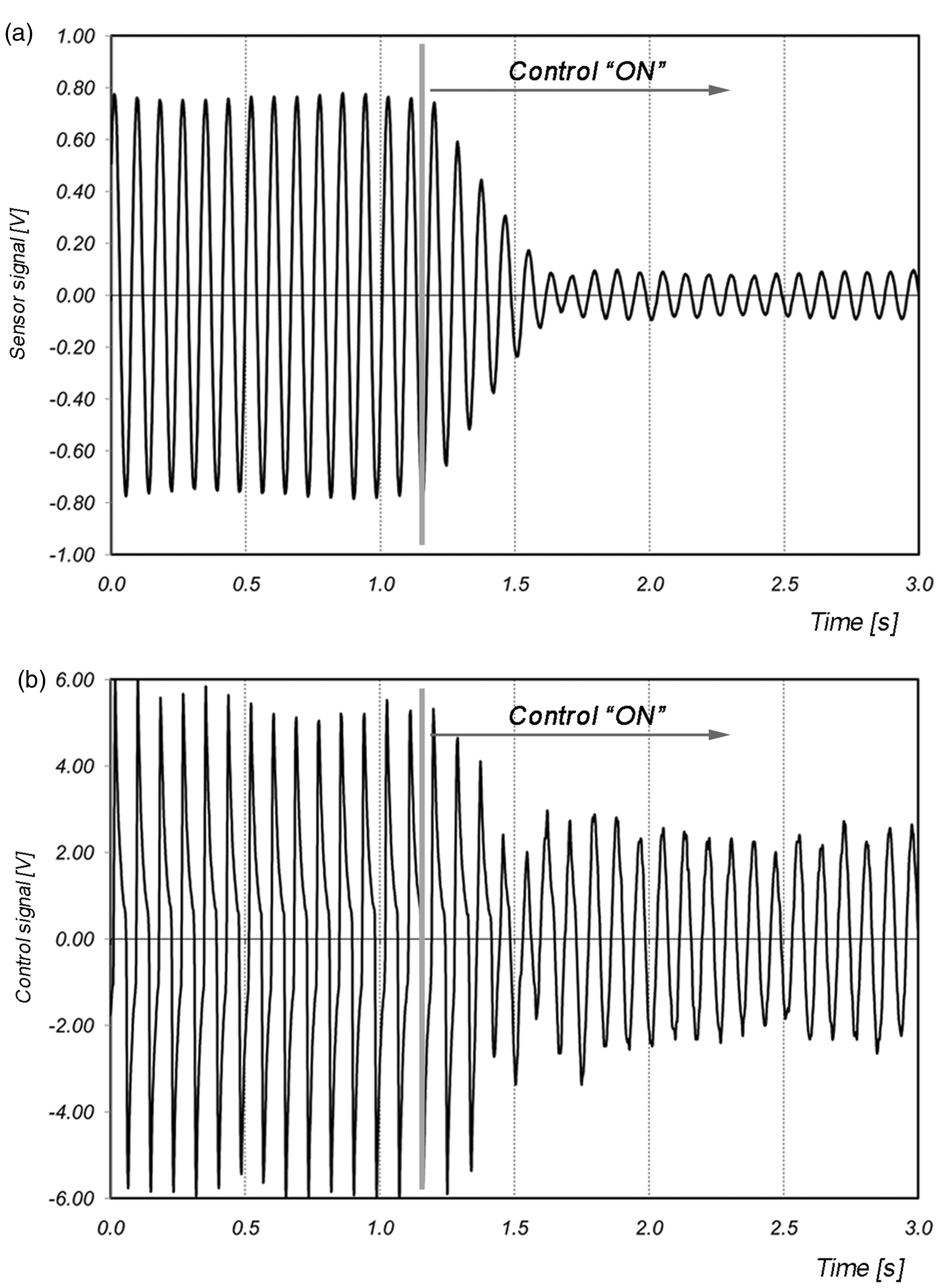
In open-loop (uncontrolled), the control signal is clipped in order to prevent voltage input in the high voltage amplifier to be out of the −5 V to 5 V range. In closed-loop (controlled), the control signal with a range from −2.5 V to 2.5 V is adequate for full active vibration control (actuator voltage from −100 V to 100 V). In Figure 12 the frequency response of a sensor signal using fast Fourier transform for uncontrolled and controlled cases is depicted.
Frequency response using fast Fourier transform (FFT) for controlled and uncontrolled cases.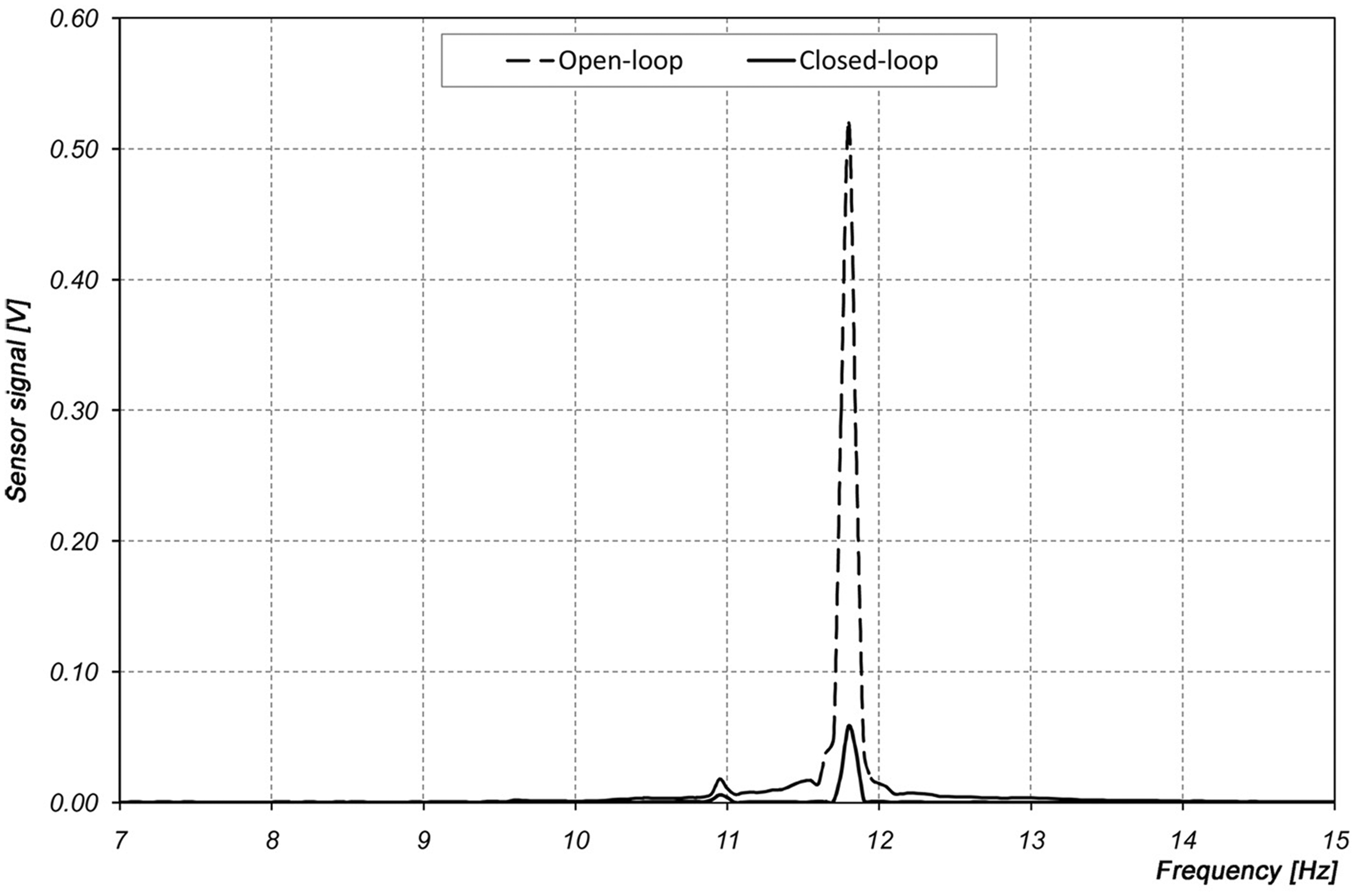
Normalized RMS sensor output voltage for each combination of factors and decrease in magnitude.
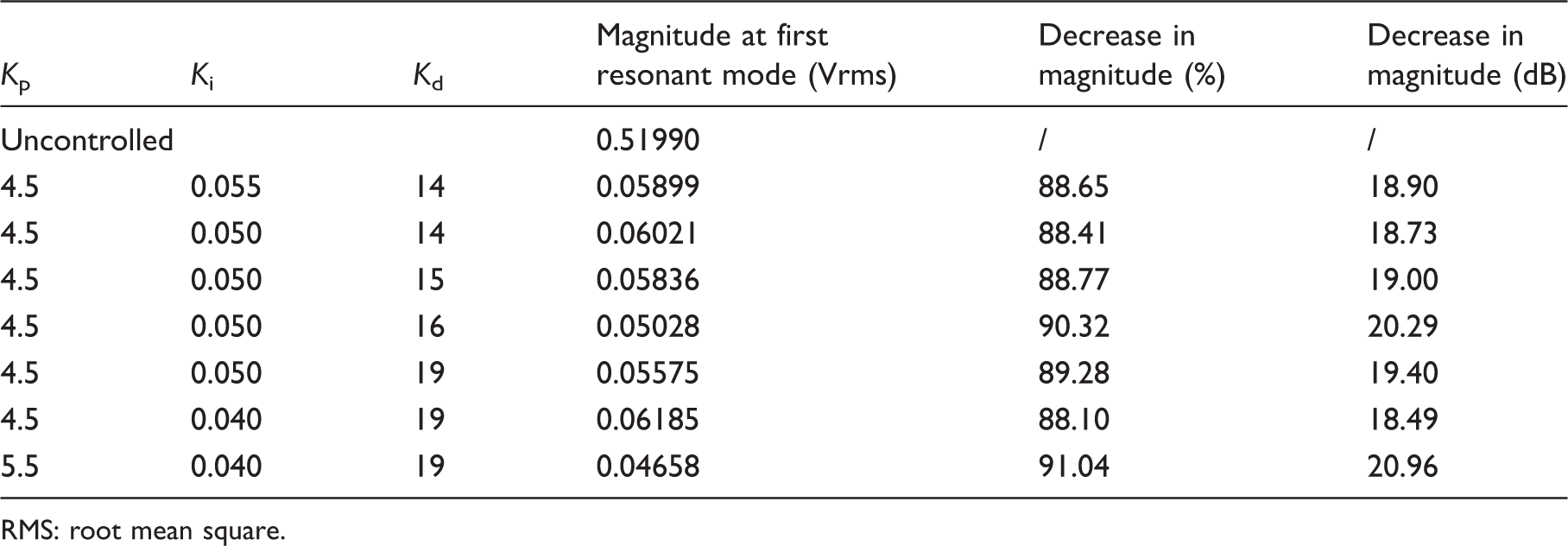
RMS: root mean square.
It can be seen from Table 2 that control performances of the PID controller are changed with a variation of three factors. The damping of vibration at the first resonant mode for each combination of coefficient gains is different. From Table 2, it can be concluded that the higher active damping on the first resonant frequency is realized with the following factors,
However, the coefficients of the highest damping at the first mode are not the optimal coefficient gains, because the sensor output signal in the time domain is increased with regard to the output signal of other coefficients. The time response for the sensor output for different PID factors is shown in Figure 13.
Time response for sensor output for different proportional-integral-derivative (PID) factors.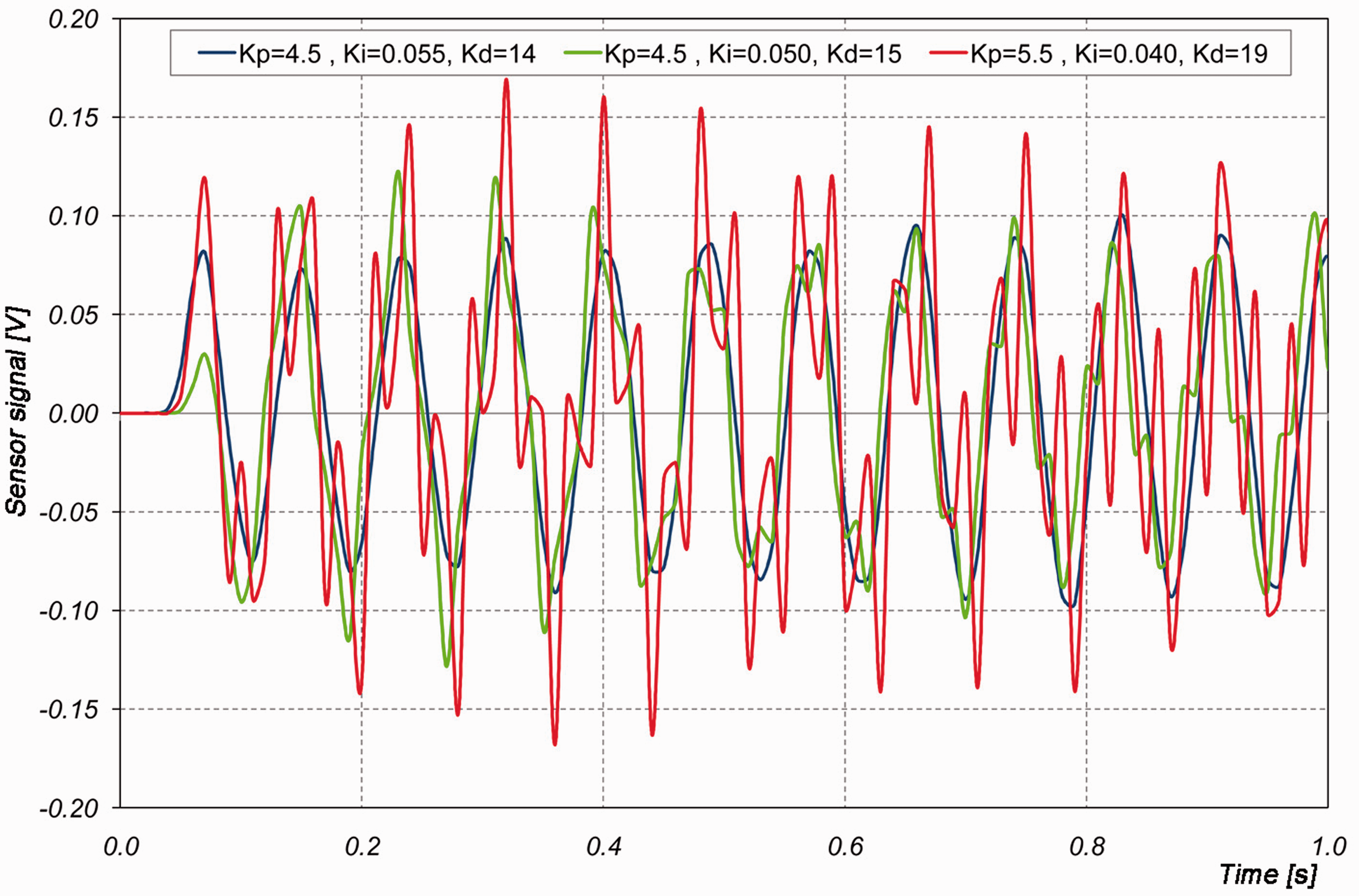
The interference margin of stability is evident from the shape of the time signal. The frequency spectrum of those signals is given in Figure 14. Figure 14(a) shows the frequency spectrum at the first mode. The signal with coefficient gains of
The frequency response of sensor signal using fast Fourier transform (FFT) for different values of proportional-integral-derivative (PID) factors: (a) first resonant frequency; (b) second resonant frequency.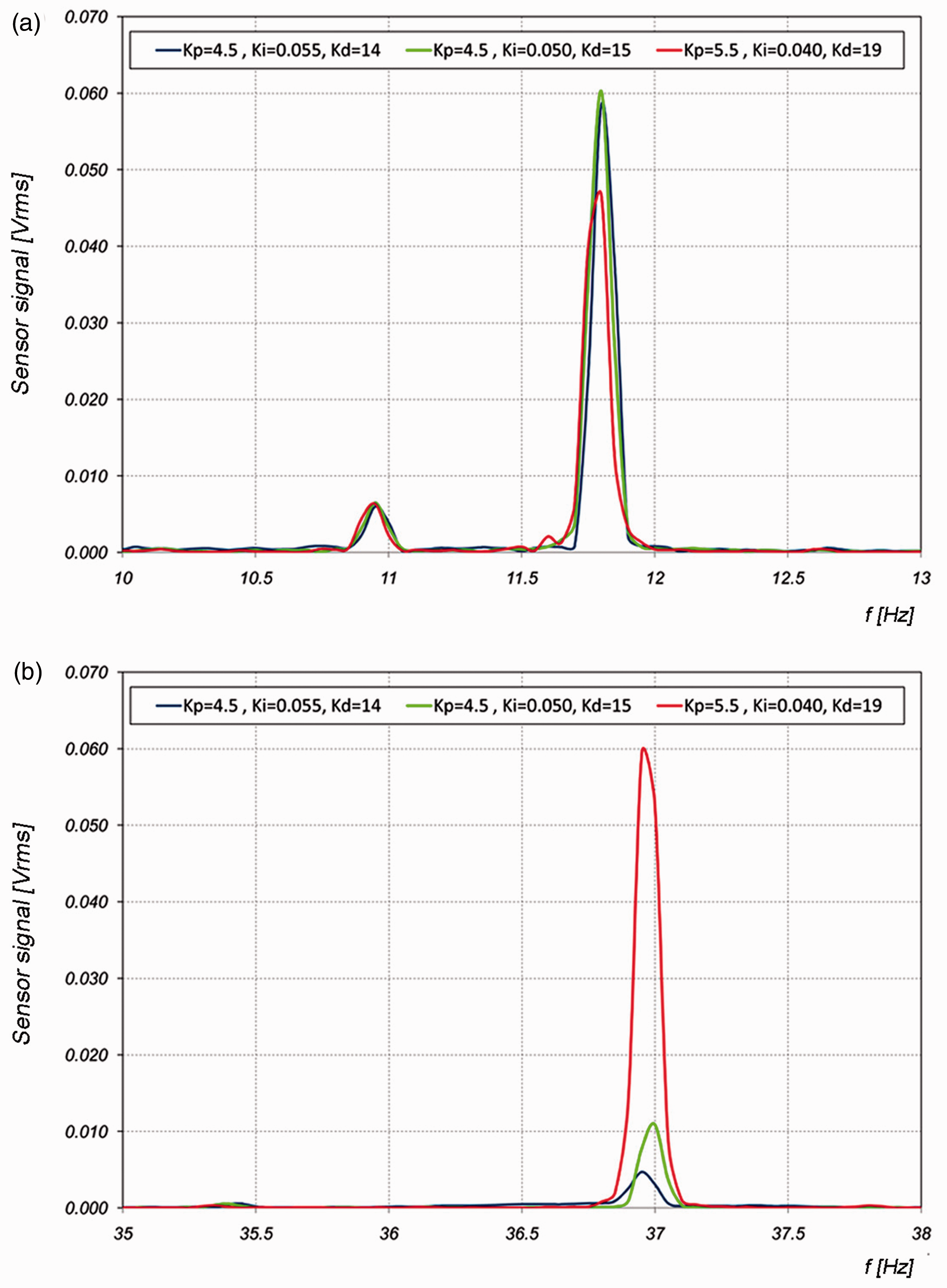
As can be seen from the figures, the developed active vibration system based on PID algorithm control reduces the vibration of the plate at resonant frequency. The Ziegler-Nichols tuning method is an appropriate method, but manual corrections for PID factors are preferable for maximal vibration suppression. Those corrections must be carefully tuned without any perturbation of the stability margin.
6. Conclusion
This work has presented the design, development and experimental verification of an active vibration control system. The approach of using strain gages such as sensor platform, PZT materials for actuation and a PID controller for active damping problems are verified on flexible aluminum plate with considerable suppression level.
The modified PID control algorithm was implemented on the “PIC32-PINGUINO-OTG” board, with integrated PIC32MX440F256H microcontroller. A few inventions of control strategy were implemented in the PID controller with the aim of preventing the effect of noise and signal saturation. The PID controller was tuned by the Ziegler-Nichols method choosing convenient values for controller parameters (i.e., the critical gain
In the case of vibration control under periodic excitation, maximum vibration reduction is achieved by coefficient gains of
However, the developed active vibration control system on a microcontroller platform can suppress the vibration effectively, especially for active damping application on a structure with low natural frequency.
Footnotes
Funding
This work was supported by the Ministry of Education, Science and Technological Development of the Republic of Serbia through Technological Development Projects number 35035.