
Abstract
Vibration suppression is one of the most important challenges of flexible multi-body dynamic systems. In this paper, a launch vehicle with flexible bodies and fuel sloshing is considered as a flexible multi-body dynamic system. The aim of this paper is to propose a vibration suppression strategy for attitude control of the vehicle based on sub-band adaptive filtering. The advantages of the sub-band analysis leads to the design of a new vibration control system that can simultaneously attenuate the effects of three unknown vibration disturbances. In this regard, the simulation results of a nonlinear dynamic model of the vehicle with the filtering strategy confirm the valuable performance of the proposed vibration suppression approach.
Keywords
1. Introduction
Vibration control is one of the most important challenges of flexible multi-body dynamic systems. The undesired effects of vibrating subsystems in advanced aerospace devices have led to significant efforts related to design vibration control strategies. From this point of view, there are many types of control approaches including optimal, robust, and adaptive employed to design a control strategy for reducing vibrational effects in aerospace systems. Moreover, dynamic inversion and input shaping are approaches used for suppressing residual vibration in mechanical systems, see Feddema et al. (1997) and Baozeng and Lemai (2014). From these works, adaptive approaches have been widely used for vibration control in complicated dynamic systems. Among these activities, Kharisov et al. (2008) have proposed L1 adaptive control for the vibration control of an aerospace vehicle in the face of bending vibration. Jiang et al. (2013) have investigated the real-time estimation of time-varying bending vibration frequency for vibration suppression. George et al. (2012) have proposed an adaptive vibration control system for flexible spacecraft.
Literature reviews show that adaptive filtering strategies have been used considerably for vibration control in aerospace devices. On the other hand, the idea of vibration reduction based on adaptive filtering has been employed to decrease the effects of vibrating subsystems. In this regard, Choi and Bang (2000), Oh et al. (2008) and Khoshnood et al. (2010) have proposed various types of adaptive filtering approaches for application in aerospace systems. Current studies in this area have confirmed the practical and useful benefits of adaptive filtering strategies. Zhong and Cui (2012) have designed a vibration control system for manoeuvring spacecraft with a flexible manipulator based on an adaptive disturbance rejection filter. Moreover, Lee et al. (2012) have implemented mechanical vibration reduction control of two-mass permanent magnet synchronous motors using an adaptive notch filter. In their study, the fast Fourier transform analysis has been used to improve the performance of the vibration control system. Based on interpolated discrete Fourier transform Zhi-Jian et al. (2013) have designed an adaptive notch filter for bending suppression.
In a category of related work on vibration control, several authors have investigated multiple disturbances and vibrational subsystems. In this area Micheau and Coirault (2000) have proposed an adaptive controller using filter banks. This multi-rate system is applied to reject multi-sinusoidal disturbance. El-Sheimy et al. (2004) have used wavelet de-noising for inertial measurement unit (IMU) alignment. In another similar work, Liu et al. (2007) have implemented micro-electromechanical system (MEMS) gyros output signal de-noising based on wavelet analysis. Moreover, Toaie et al. (2014) have used indirect adaptive attenuation of multiple narrow-band disturbances to design an active vibration control system.
An aerospace launch vehicle (ALV) with flexible multi-bodies and sloshing, in which four boosters are used, is a significant example of a system with multiple vibrating subsystems. The existence of structural flexibility in the core and four cluster bodies of the vehicle experiencing fuel sloshing leads to many challenges related to the design of a vibration control system. Time-varying frequency in aerospace systems is another problem that must be investigated in the control design procedure. However, the vibration of subsystems is critical in terms of two main issues: flexibility of structures leads to inaccurate performance of the system, and flexibility arising from broadband frequency may cause resonance in a greater number of situations. Because of this, as mentioned in the latest literature review, control strategies based on frequency analyses have been very significant in the design of vibration control systems for ALVs.
The output of the inertial navigation system (INS) in ALVs usually consists of broadband desired and undesired frequencies. In order to perform online analysis and de-noising the frequency spectrum of the INS output, it is very practical to use a network of filters. In previous studies where the adaptive filtering has been used, there was no general approach to simultaneously suppress the effects of broadband frequency vibrating subsystems including both structural bending vibration and fuel sloshing. Hence, for aerospace vehicles to behave dynamically as a flexible multi-body system, a new approach must be proposed based on consideration of broadband frequency. In this paper, a new strategy for reducing the effects of multi-vibrating subsystems is presented using the sub-band adaptive filtering approach. This vibration control system is constructed based on the short-time Fourier transform (STFT) to implement a network filter or filter bank. One of the advantages of the vibration controller is that the system is designed to augment the common attitude control system of an ALV.
Sub-band adaptive filtering is a practical kind of a multi-rate filter banks. These powerful tools are widely used for de-noising, vibration control and active noise cancellation (Zhi-Jian et al., 2013). In dynamic systems where a closed-loop control system is used, implementation of sub-band adaptive filters usually encounters some challenges. As a result, in previous activities related to the vibration control of aerospace vehicles, filter banks have not been directly used in the closed-loop control system but only for off-line applications. From these studies, Micheau and Coirault (2000) have proposed a new sub-band algorithm based on a digital Fourier transform (DFT) filter bank for multi-sinusoid rejection in an off-line signal path. In the direct application of filter banks, the delay generated from the sub-band filtering process produces a phase delay that affects the stability margins of the closed-loop control system. Therefore, in term of protecting the system against probable delay, the adaptive filter must be used in the delayless structure. The delayless sub-band adaptive filter is a useful concept in which the delay of the sub-band processing does not enter the closed-loop (Lee et al., 2009). In Figure 1, a block diagram of the attitude control system with the proposed vibration suppression strategy is demonstrated. In this figure, the block of the main control system is a gain-scheduled proportional-integral-derivative (PID) controller and the block for sub-band signal processing consists of a frequency estimation algorithm implemented in the sub-band frequency. The sub-band system is designed using a multi-rate filter bank. In the next block of this figure, estimated parameters are used in a series of notch filters for implementation of the vibration suppression strategy.
Block diagram of the robust adaptive filtering strategy.
In this paper, a nonlinear dynamic model of an ALV with flexible bodies (a core, and four flexible bodies) and fuel sloshing is simulated and the proposed vibration control strategy is used for the control of subsystem vibration. Simulation results of a nonlinear dynamic model of the vehicle with a sub-band filtering strategy confirm the valuable performance of this vibration control approach.
This paper is organized as follows: a brief procedure of dynamic modelling of the ALV is given in section two. In section three the new vibration suppression approach based on sub-band adaptive filtering is explained. Simulation results of a numerical model of the ALV along with the new vibration control strategy are presented in section four. Concluding remarks of the proposed study are given in section five.
2. Dynamic modelling of the ALV
According to the length-to-diameter ratio of clustered and core bodies of an ALV used for boosting acceleration, these structures can be modelled as flexible beams. In this study, an ALV with four flexible clustered bodies and one flexible core body structure along with fuel sloshing in the core body is simulated and analysed, particularly in terms of vibration.
In order to derive equations of motion for the rigid and flexible bodies of the ALV, the quasi-coordinate Lagrange equations are used, (Jafari et al. 2010). These equations, based on kinetic and potential energies, are given as follows
For the flexible parts the standard format of the Lagrange equation must be used as
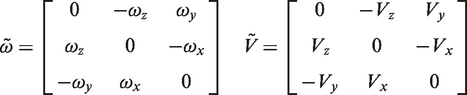
In Figure 2, position vectors of the core and four clusters bodies are shown, therefore
Schematic of the ALV structures and defined coordinates.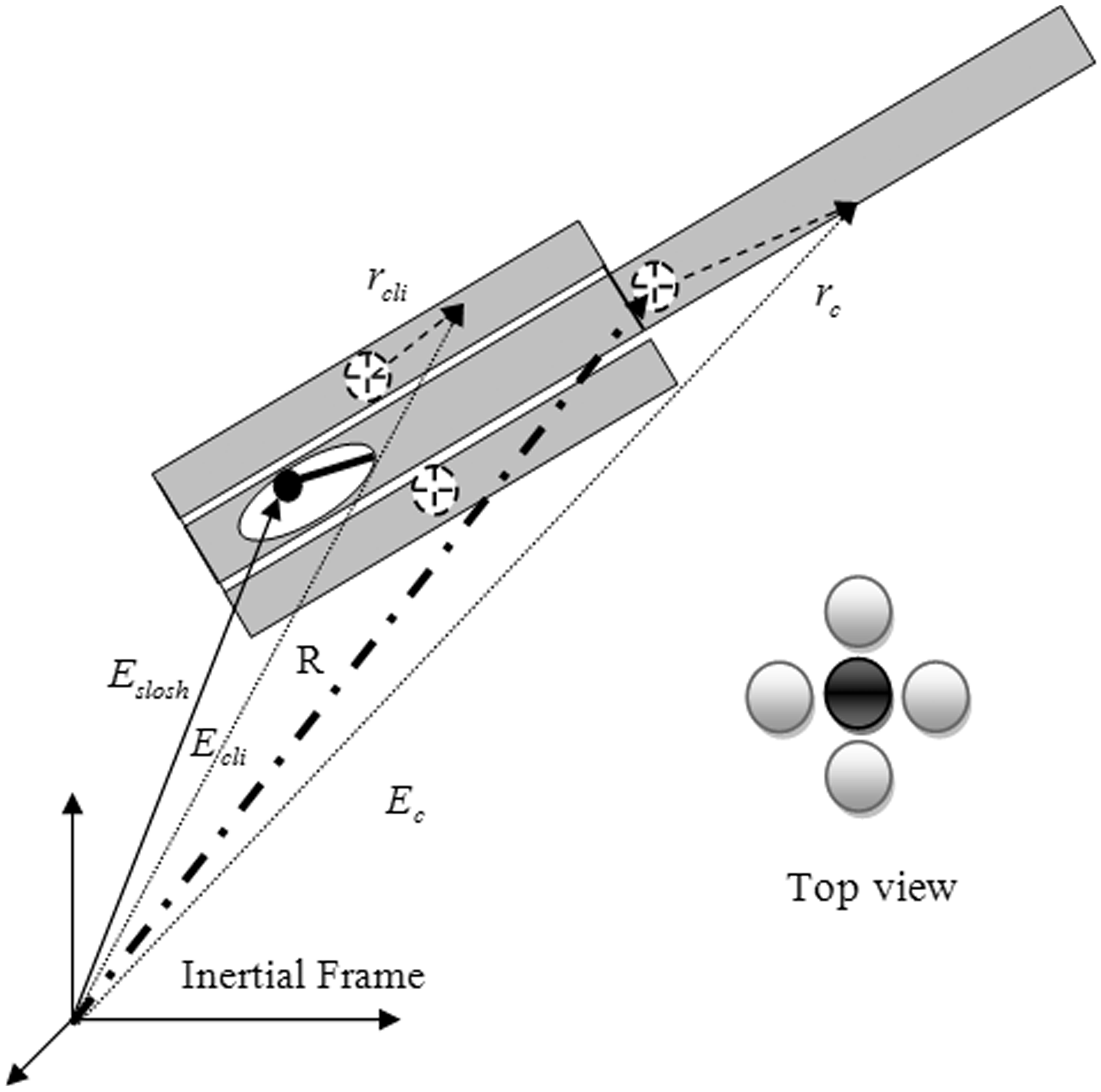
Regarding two banding vibration modes for each cluster, one can state
2.1. Kinetic and potential energies of the vehicle
According to equation 1 the kinetic energy of the core body with flexible effects can be expressed in a vector matrix-based format as follows
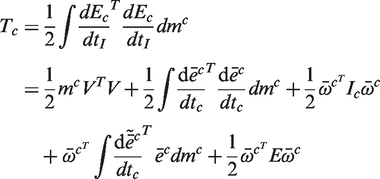
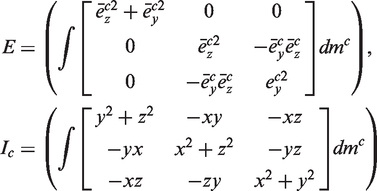
Considering equation 6, the kinetic energy of the clustered bodies is stated in a vector matrix format in equation 11. With regard to the symmetrical dynamics of the vehicle, the kinetic energy of the four clustered bodies is similar. However, the energy of the ith cluster body is computed as follows
The potential energy arising from the elastic behaviour of the core and cluster bodies are shown in equations 12 and 13 as
The overall equations of motion describing the rigid and flexible dynamic of the vehicle are given in the appendix.
In this ALV, the sloshing phenomenon is also modelled using mechanical models such as pendulum or spring mass systems. This process has been implemented in several works (Jafari and Khoshnood, 2010). As the cluster bodies of the vehicle are solid rocket motors, the fuel sloshing only appears in the core body of the vehicle regarding the existence of liquid fuels. Vibrational characteristics of this dynamic behaviour are addressed by numerical simulation. As illustrated in Figure 2, the position vector of a pendulum model of the fuel sloshing is defined with

This strategy leads to the fully coupled equations of motion for each sub-system.
3. Vibration suppression strategy
The existence of multi-resonance frequency leads to the use of a frequency-based vibration suppression strategy. On the other hand, frequency analysis of system output and active filtering is a powerful and practical approach that can be applied to the ALV as a flexible multi-body dynamic system. In this regard, common active filtering methods used in single flexible structures cannot be employed for broadband frequency ranges. Therefore, in order to reject multi-resonance frequency, in this study, sub-band filtering and sub-band adaptive filtering are used in the face of common full-frequency band filtering methods.
3.1. Sub-band adaptive filtering
There are at least two significant challenges of the full-frequency band estimation algorithms. Significant examples include convergence and persistency excitation. Generally, in full-frequency band analyses commonly used for vibration suppression, the estimation and active vibration control algorithms often encounter weak input signals, and this does not guarantee the persistency excitation. These problems led to the wide use of sub-band analysis in recent activities. However, using sub-band analysis instead of full-frequency band solves the problems of signal correlation, persistency excitation, convergence, and so on. In sub-band adaptive filtering used for vibration control, the input signal of the analysis part which is often the feedback signal of the main closed-loop control system is divided in to several alternative frequency bands as shown in Figure 3. Therefore, each frequency band can be separately analysed to realize a reduction in vibration.
Decomposition of a signal in to alternative frequency bands.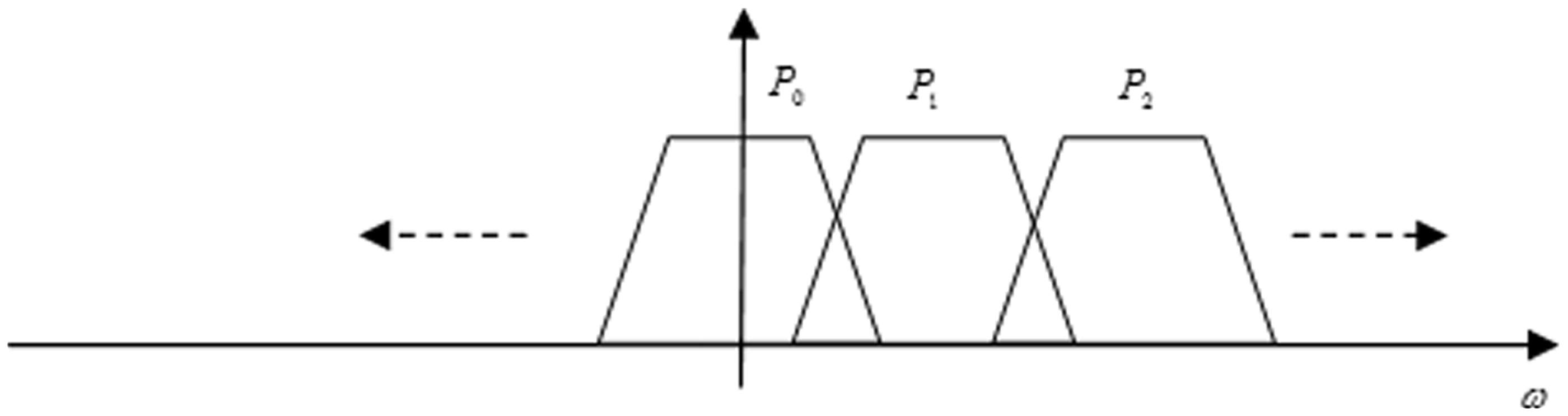
One of the practical sub-band adaptive filters called the delayless filter is created from DFT filter banks (Chin and Farhang-Boroujeny, 2001). This type of adaptive filter is used to analyse the output signal of the INS. The delayless sub-band adaptive filter, as illustrated in Figure 4, consists of three parts: analysis filters, estimation parts and full-frequency band filters. The analysis part includes several low-pass filters (h(z)) multiplying with an exponential function to generate a complex transform domain signal. This part works as a STFT. The method of weighted overlap-add is used for the production of a DFT sub-band adaptive filter (Farhang-Boroujeni, 1998). In this structure each sub-band includes only a deterministic frequency band, which is highly appropriate for frequency estimation. Moreover, the second part is designed to update the coefficients of the full-frequency band filters. Because these filters are directly inserted into the closed-loop control system of the vehicle, the current part of the sub-band adaptive filter plays an important role in the stability of the whole system.
A delayless sub-band adaptive filter with analysis, synthesis and main filters.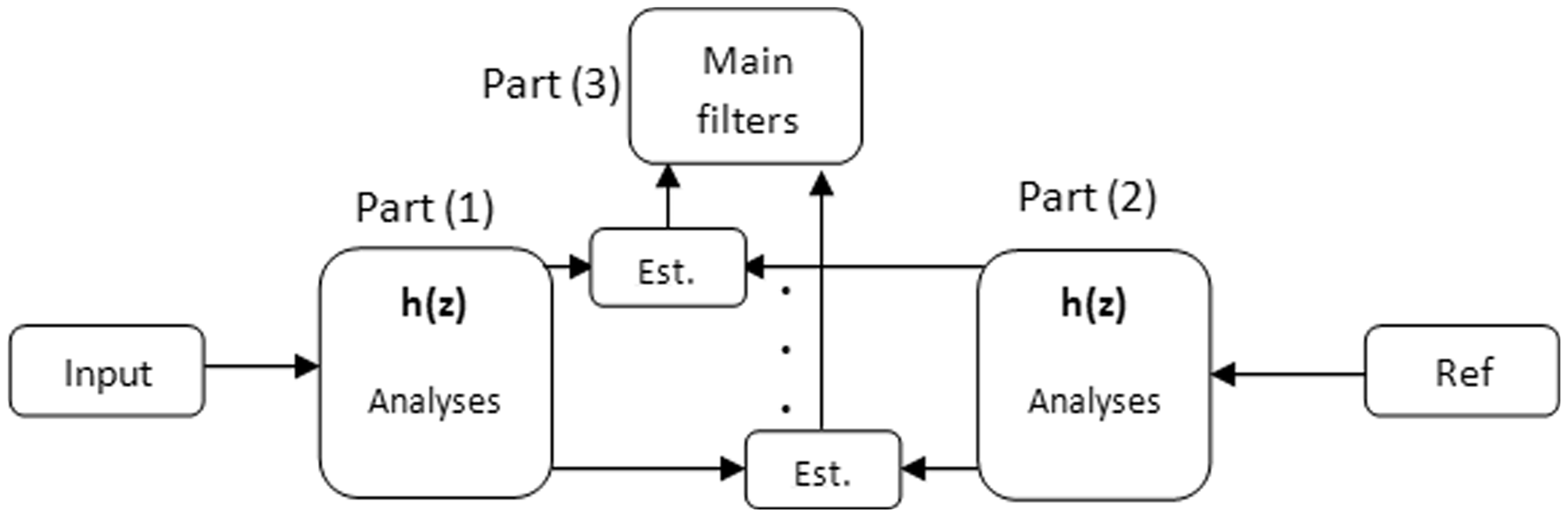
In the proposed structure, an operator decimates the signal with decimation factor (
3.2. Real-valued DFT filter bank
The output signal of the analysis part of the DFT filter bank is a complex-valued signal. In the current study, according to the advantage of the real-valued signal in frequency estimation, the DFT filter bank is implemented in the real-valued structure as shown in Figure 5.
An structure for generating a real-valued DFT filter bank.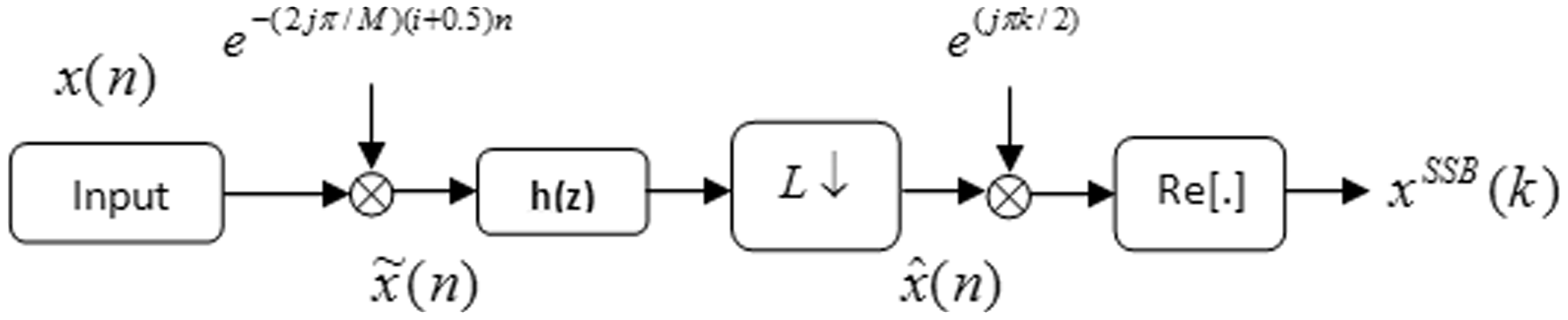
If

Using single side band (SSB) modulation, the real-valued signal is produced as

With regard to the frequency distribution of the INS output, the characteristics of the sub-band adaptive filter must be precisely tuned. These include the number of channels (M), prototype filter parameters and type of decimation (L).
Distribution of the dominant vibration frequency of the ALV.
In order to design a prototype filter for the DFT filter bank the weighted least square method is employed. One of the useful choices in this case is the selection of the order of the prototype filter according to the equation
3.3. Frequency estimation in sub-band
The second part of the vibration suppression system consists of the estimation algorithm of vibration frequencies. It is noticeable that the estimated frequencies are parameters of the full-frequency band filters. On the other hand, the full-frequency band filters and the sub-band estimation algorithms simultaneously make a sub-band adaptive filter for vibration reduction in the closed-loop attitude control system of the vehicle. In Figure 1, the block of the sub-band estimation algorithms is named ‘subband signal processing’.
3.3.1. Model reference frequency estimation in sub-band
In the model reference estimation, a model reference is proposed to define an error signal between the reference and the actual model. Therefore, a cost function using the 2-norm method can be extracted as the following




By minimizing the cost function defined in equation 18, an algorithm for estimating the cut-off frequency of the filter is extracted. This cut-off frequency is the same undesired frequency associated with the signal that must be reduced through the vibration reduction process. Therefore, according to the Massachusetts Institute of Technology (MIT) rule, the estimation algorithm is proposed by minimizing the cost function as follows
3.4. Full frequency band filters
The main part of the proposed control strategy consists of several filters that significantly implement vibration reduction. The parameters of these full frequency band filters are tuned via the signal processing unit implemented in sub-band. As these filters are directly inserted in the closed-loop control system of the vehicle, they must have low delay and guarantee the stability margins of the closed-loop. In addition, these filters must reduce only the effect of undesired frequencies and have no another effect on the system. As a result, one of the best choices for this part of the system is an IIR notch filter, which applies little delay on the closed-loop control system. Moreover, the low orders of these filters are enough for the processing of vibration suppression. The transfer function of an IIR filter proposed in this study is given as
3.5. Stability analysis
3.5.1. General discussion on stability
As well as the full-frequency band filters ability to reduce the effect of undesired vibration frequencies, these filters can affect the phase margin of the closed-loop control system. Investigations into the effects of adaptive filters on the closed-loop system confirm that if the precision of the frequency estimation algorithm is guaranteed, the filters have minimal effects on the closed-loop control system. On the other hand, stability and performance margins of the system depend considerably on the precision of the sub-band estimation algorithm.
In this study, the main goal of using the sub-band estimation algorithm in contrast with the previous methods refers to an increase in the precision of frequency estimation. However, this precision leads directly to the guarantee of the lowest effect of the vibration reduction system on stability margins. Although this investigation has been presented in previous works (Oh et al., 2008), in the next part of this paper the robustness of the proposed control system is also analysed to ensure the stability of the overall closed-loop control system.
3.5.2. Robust stability analysis
One of the practical approaches that can be used for the stability of adaptive control systems is the se of robust stability theories. These theories, when connected to alternative adaptive algorithms, make robust adaptive control systems that are widely used for industrial dynamic systems. In this regard, one can claim that the small gain theorem has a considerable and constructive role. Therefore, for the robust stability analysis of the proposed control system, the L1 and
3.5.2.1. L1 stability analysis
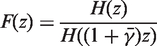
According to Figure 1, the small gain theorem can be applied to the interconnected control system shown in Figure 6. Therefore, one can define H1as the feed forward transfer function and H2 as the feedback of the main control system demonstrated in Figure 1. In this figure Gp(s) is the transfer function of the ALV dynamic and Gc(s) is the transfer function of the preliminary control system. In addition, F1, F2, … , Fn are the notch filters used for vibration reduction. Considering the frequency response of the notch filters one can show that the L1 norm of F
i
is represented as Block diagram of the small gain theorem.
It is noticeable that the condition of equation 24 is only attainable if F
i
is an FIR filter. Hence, considering L1 small gain theorem, the robust stability of the system illustrated in Figure 1 is guaranteed if the following conditions are held


Equations 25 and 26 confirm that if the preliminary closed-loop control system is robustly designed based on the L1 small gain theorem, the robust stability of the vibration reduction system is also guaranteed.
3.5.2.2.
stability analysis
The same procedure proposed in the last section is implemented for the closed-loop control system. In this section, the 
In equation 27, if F1, F2, … , Fn are IIR notch filters and K0 is set between 1 and −1, then

Equations 27 and 28 confirm that if the preliminary closed-loop control system is robustly designed based on the
3.5.2.3. Discussion of the robust stability analysis
Although both L1 and
4. Simulation results
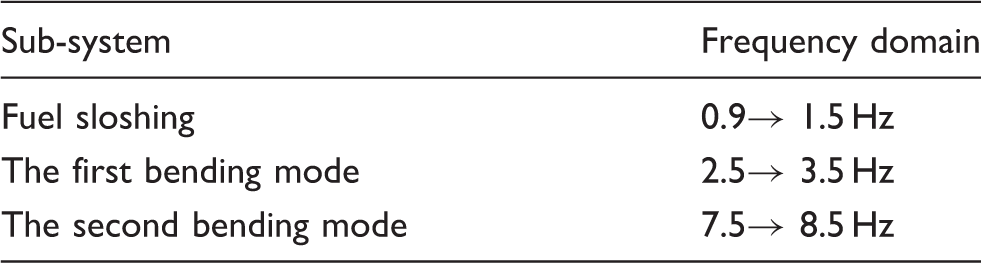
Simulation results and experimental tests show that the ALV modelled in this study has three dominant vibration modes. These undesired vibration modes include two bending vibration modes (first and second) and one fuel sloshing mode. Considering the dominant frequency distribution given in Table 1, a sub-band adaptive filter with ten channels (2.5 Hz in each band) is designed. Each vibration frequency is therefore placed in only one channel.
To ensure the effectiveness of the proposed vibration suppression strategy, the block of the vibration reduction is added to the feedback of the preliminary closed-loop control system designed for attitude control of the rigid ALV. The numerical simulation of the vehicle is carried out using MATLAB/Simulink environment. Three categories of results demonstrated that the performance of the vibration reduction system.
The first category of the results demonstrates the performance of the frequency estimation in sub-band. The second category shows the output of the INS and the final figures investigate the actuator deflections.
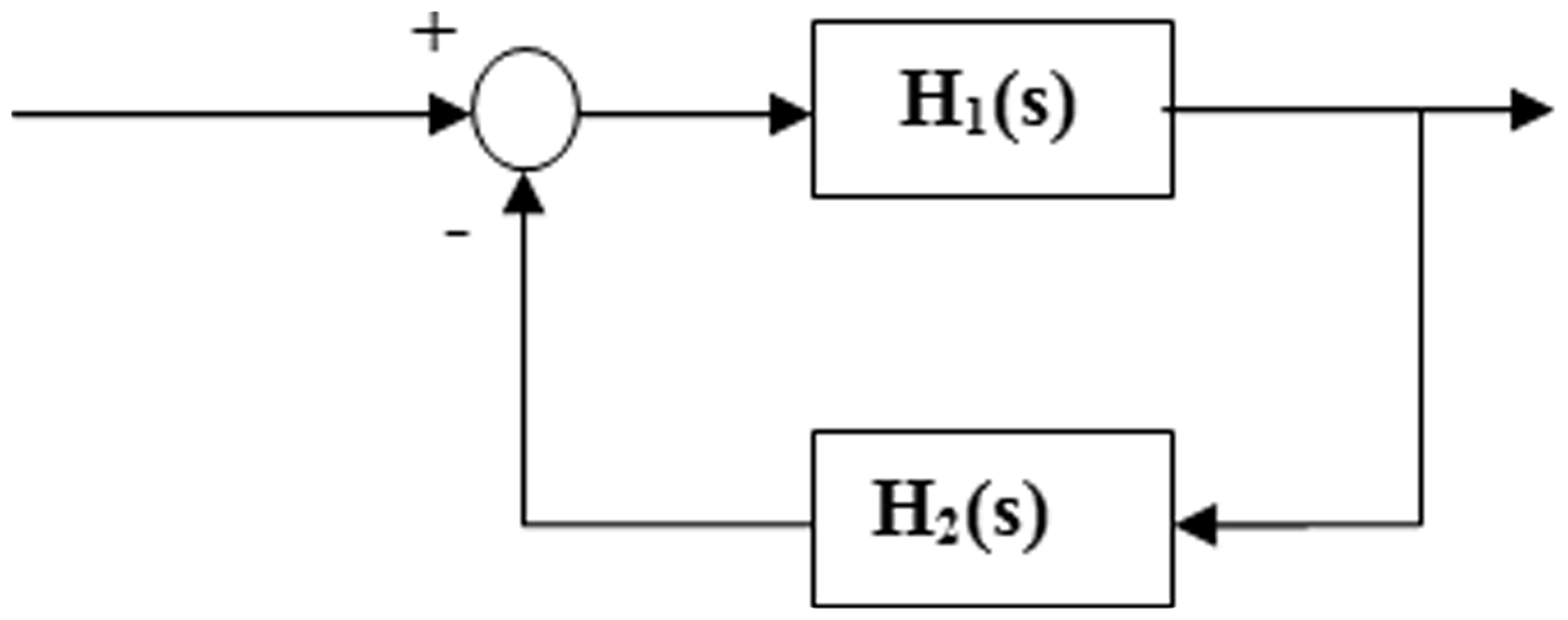
From the first category, the performance of the frequency estimation for the first and the second bending vibration frequencies and the fuel sloshing are shown in Figure 7–9.
Estimation of the first bending vibration frequency (a) and the error of estimation (b). Estimation of the second bending vibration frequency (a) and the error of estimation (b). Estimation of the dominant fuel sloshing frequency (a) and the error of the estimation (b).
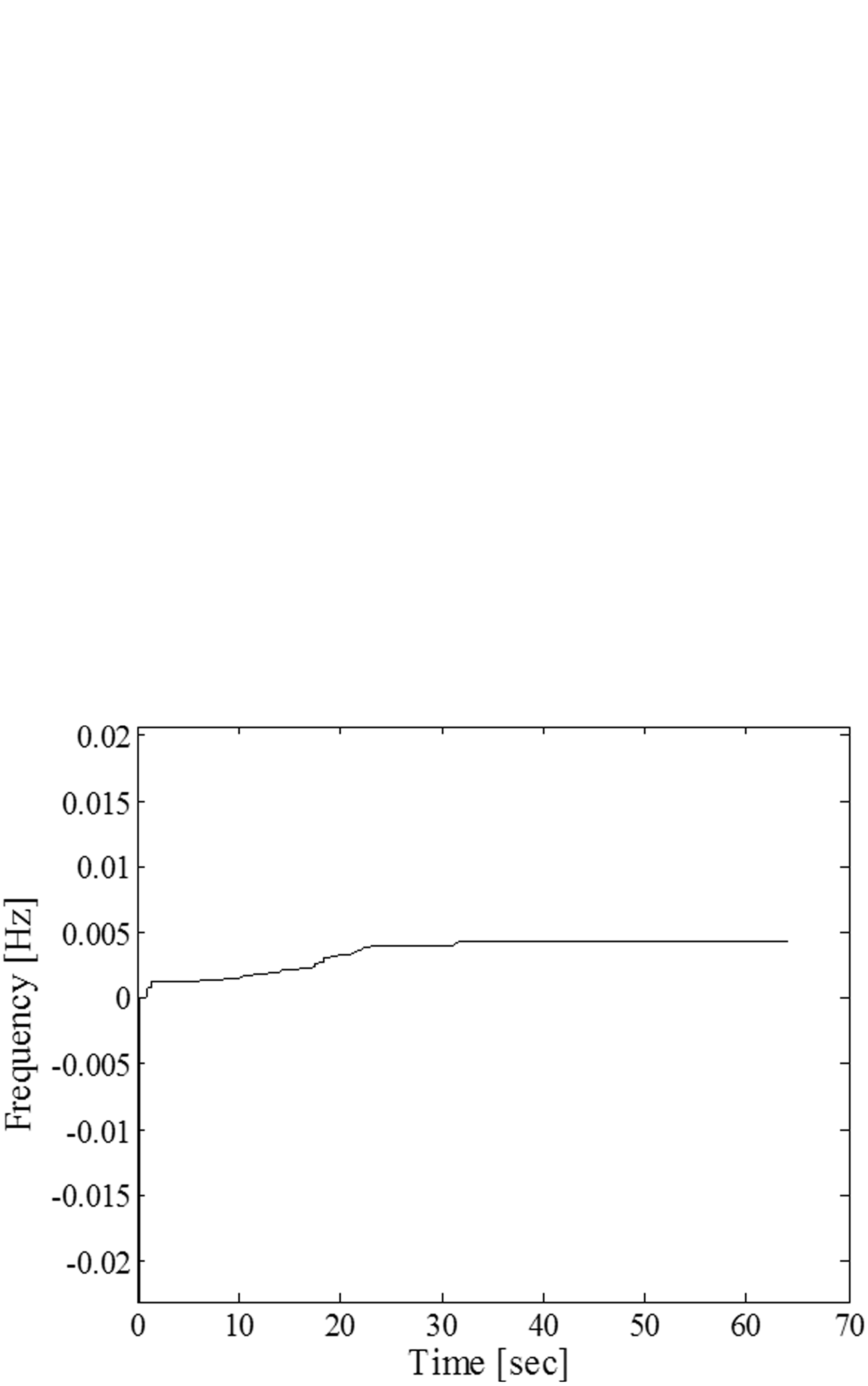
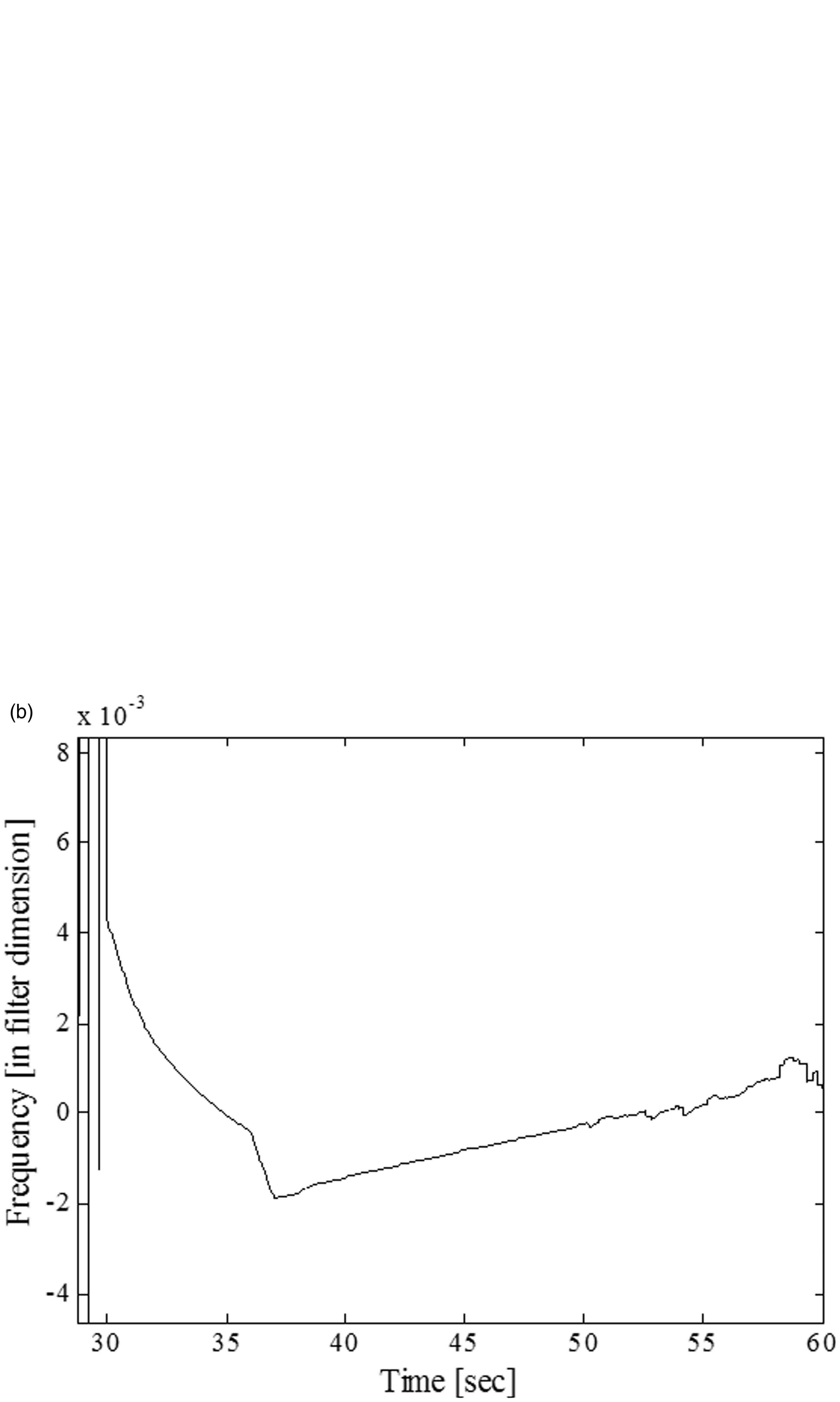
In these figures, the expected frequencies are extracted from the Fourier transform of the INS output signals, in a situation in which the vibration reduction system is turned off. As shown in Figures 7–9, the performance of the frequency estimation in the critical part of the flight time is acceptably accurate. The critical time of the flight is related to the time duration in which the resonance may occur. In these figures, filter dimension (FD) is defined from the filter parameters (K0) as introduced in equation 21.
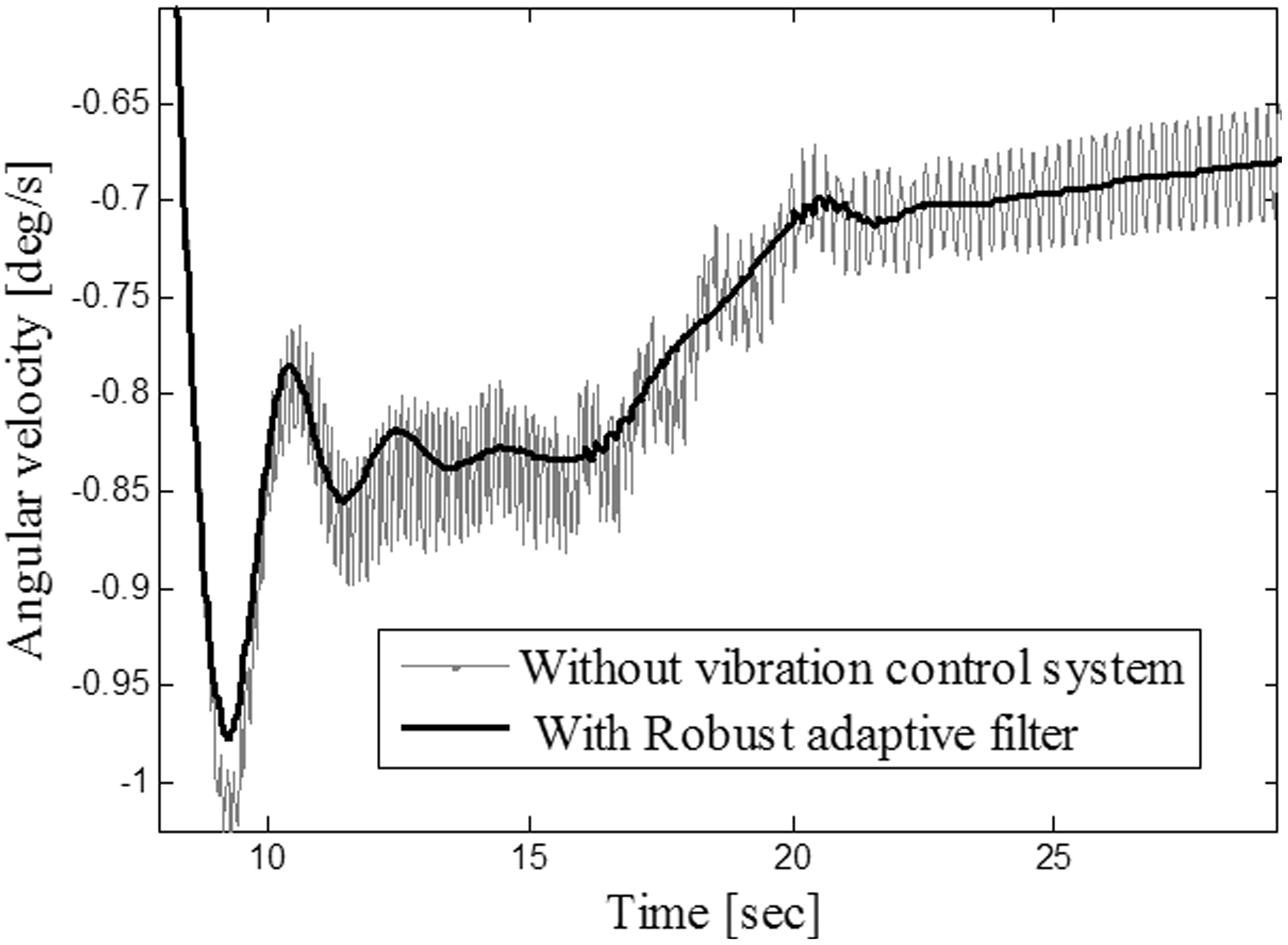
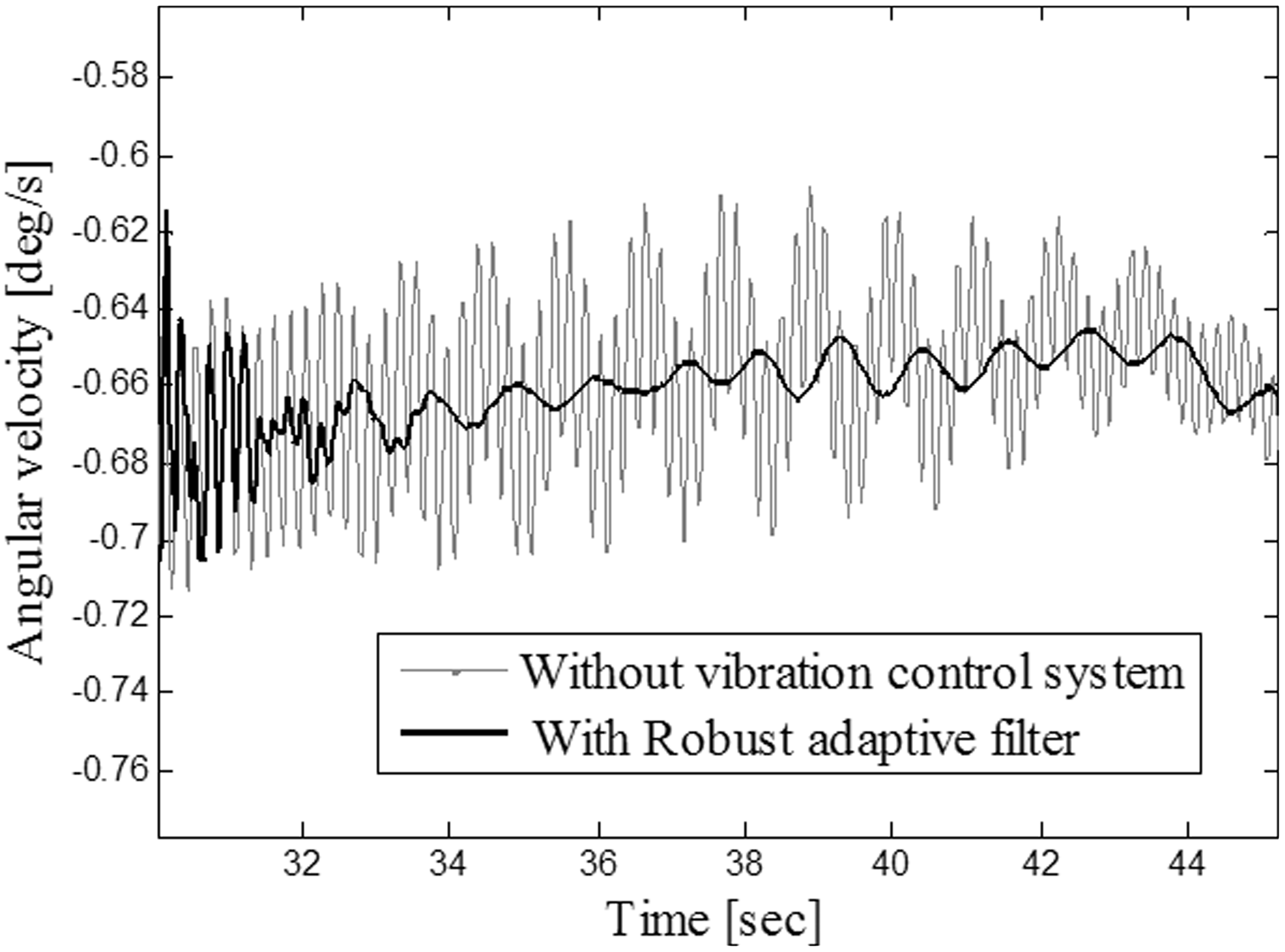
In order to investigate the performance of the new vibration reduction system, the angular velocity of the pitch channel is shown in Figure 10. This figure demonstrates that the undesired vibration is reduced during a long flight time. Significantly, the new control system can reduce these undesired vibration effects from the frequency bandwidth of the bending vibration to the frequency bandwidth of the fuel sloshing. This is the paramount feature of the new vibration control strategy, and one of the main advantages of using sub-band adaptive filtering. In Figures 11 and 12 the angular velocity is magnified to show with better resolution.
Comparison of the angular velocity in the pitch channel with and without vibration suppression system. Magnified view of the first part of Figure 10 (bending vibration). Magnified view of the second part of Figure 10 (fuel sloshing).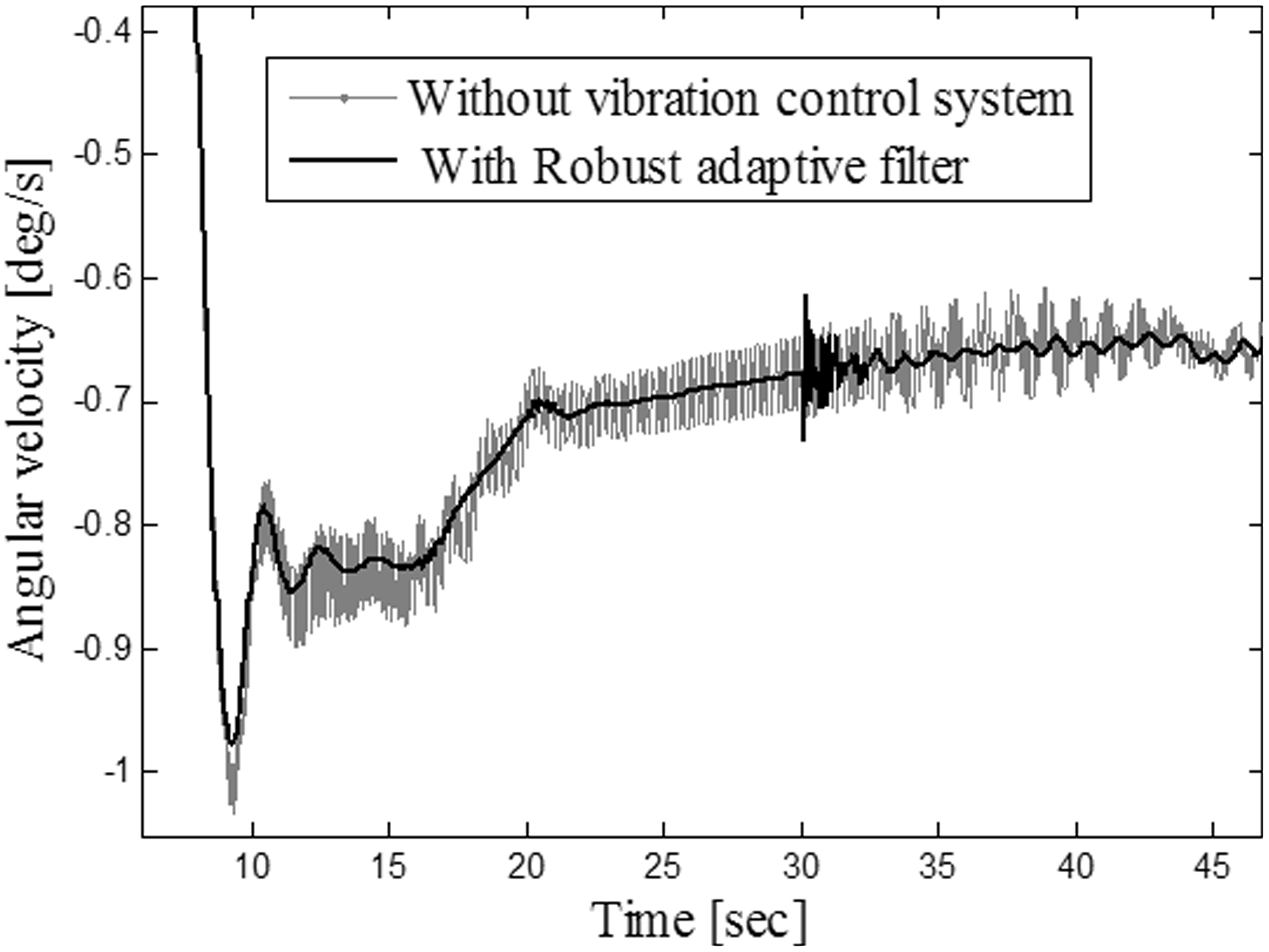
In another group of simulation results, the deflection of the actuator in the pitch channel and generalized coordinate associated with bending vibration modes are demonstrated. In this regard, Figure 13 shows the deflection of the actuator in the pitch channel. Reduction of the undesired effects of all vibrating subsystems, including bending vibration and fuel sloshing, is displayed in this figure. The new vibration control system operates to decrease the actuator oscillations, leading to the protection of the actuator structure against structural destructive effects.
Comparison of the actuator deflection in the pitch channel with and without vibration suppression system.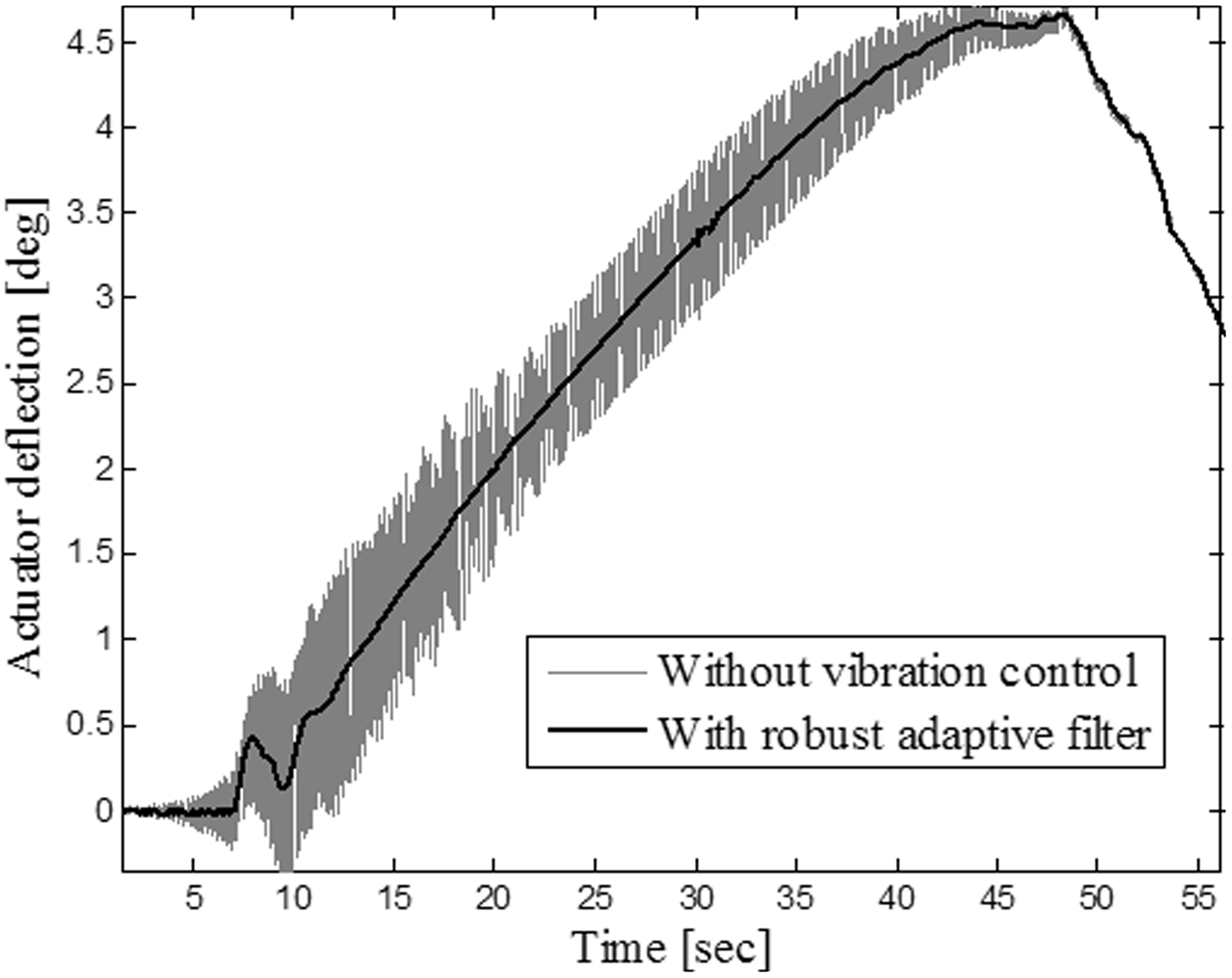
Generalized coordinates associated with the first, second and third bending vibration modes of the core body are illustrated in Figures 14–16. In addition, generalized coordinates associated with the first and second bending vibration modes of the cluster bodies are shown in Figure 17 and 18.
Vibration reduction of the generalized coordinate associated with the first bending vibration mode of the core body. Vibration reduction of the generalized coordinate associated with the second bending vibration mode of the core body. Vibration reduction of the generalized coordinate associated with the third bending vibration mode of the core body. Vibration reduction of the generalized coordinate associated with the first bending vibration mode of the cluster body. Vibration reduction of the generalized coordinate associated with the second bending vibration mode of the cluster body.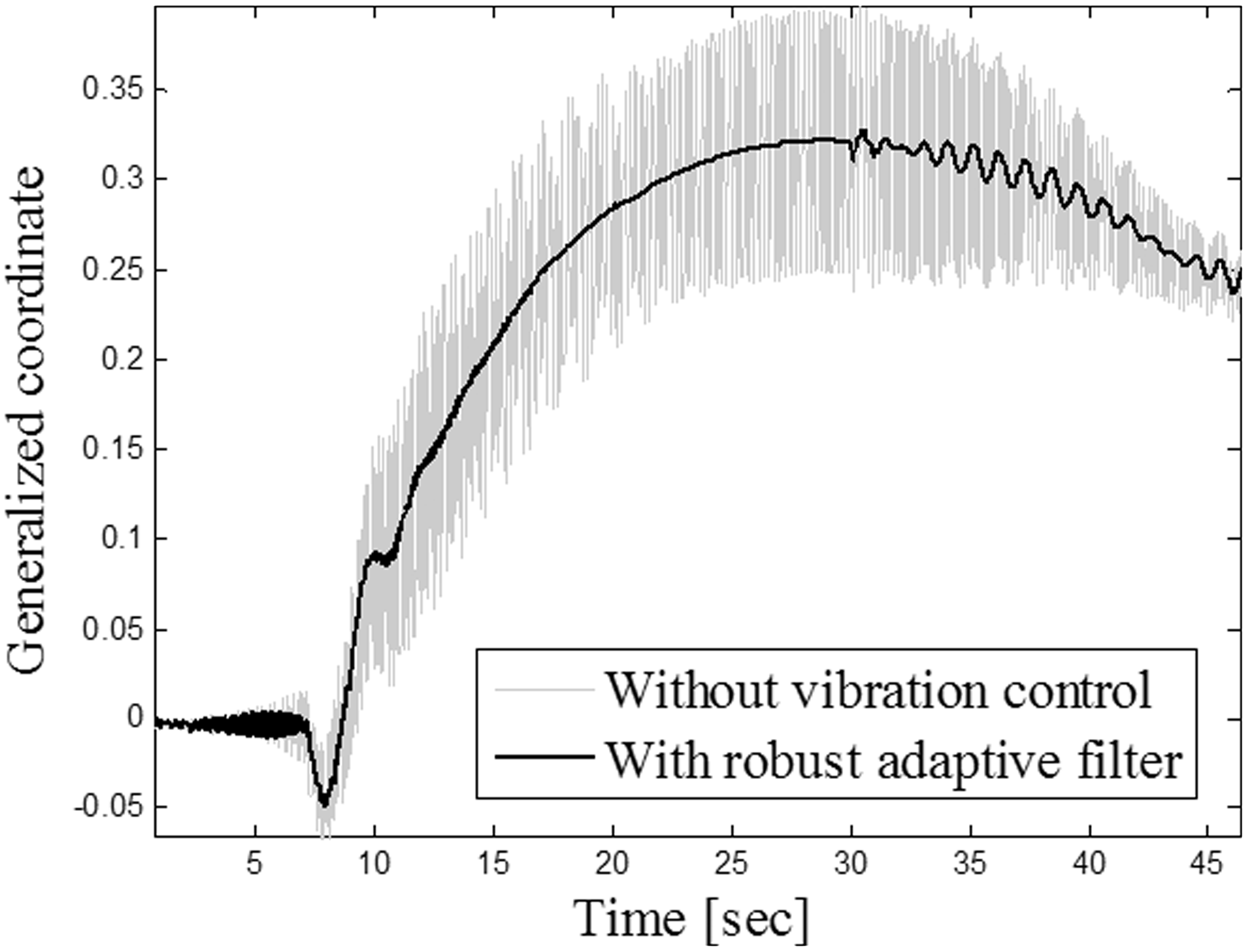
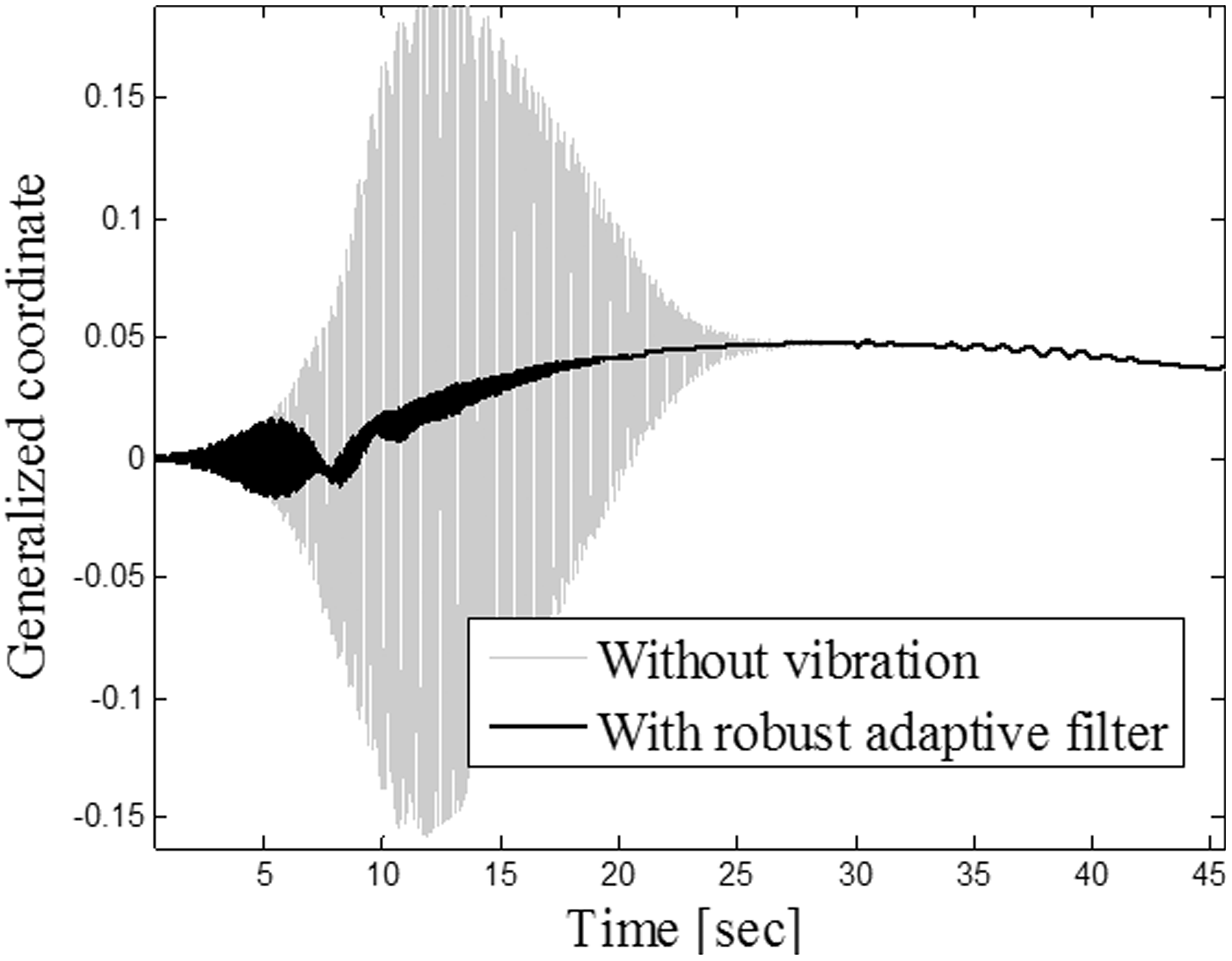

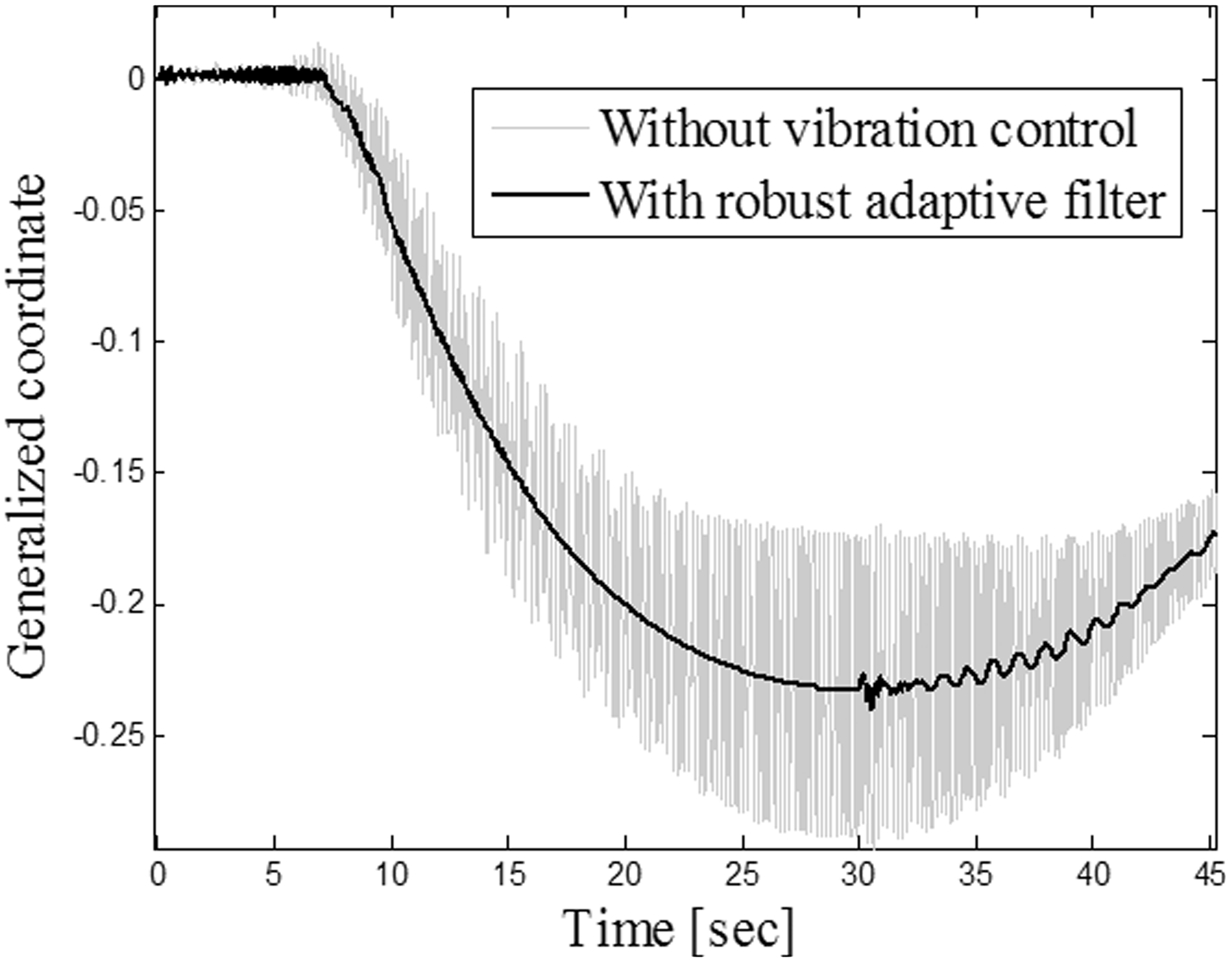
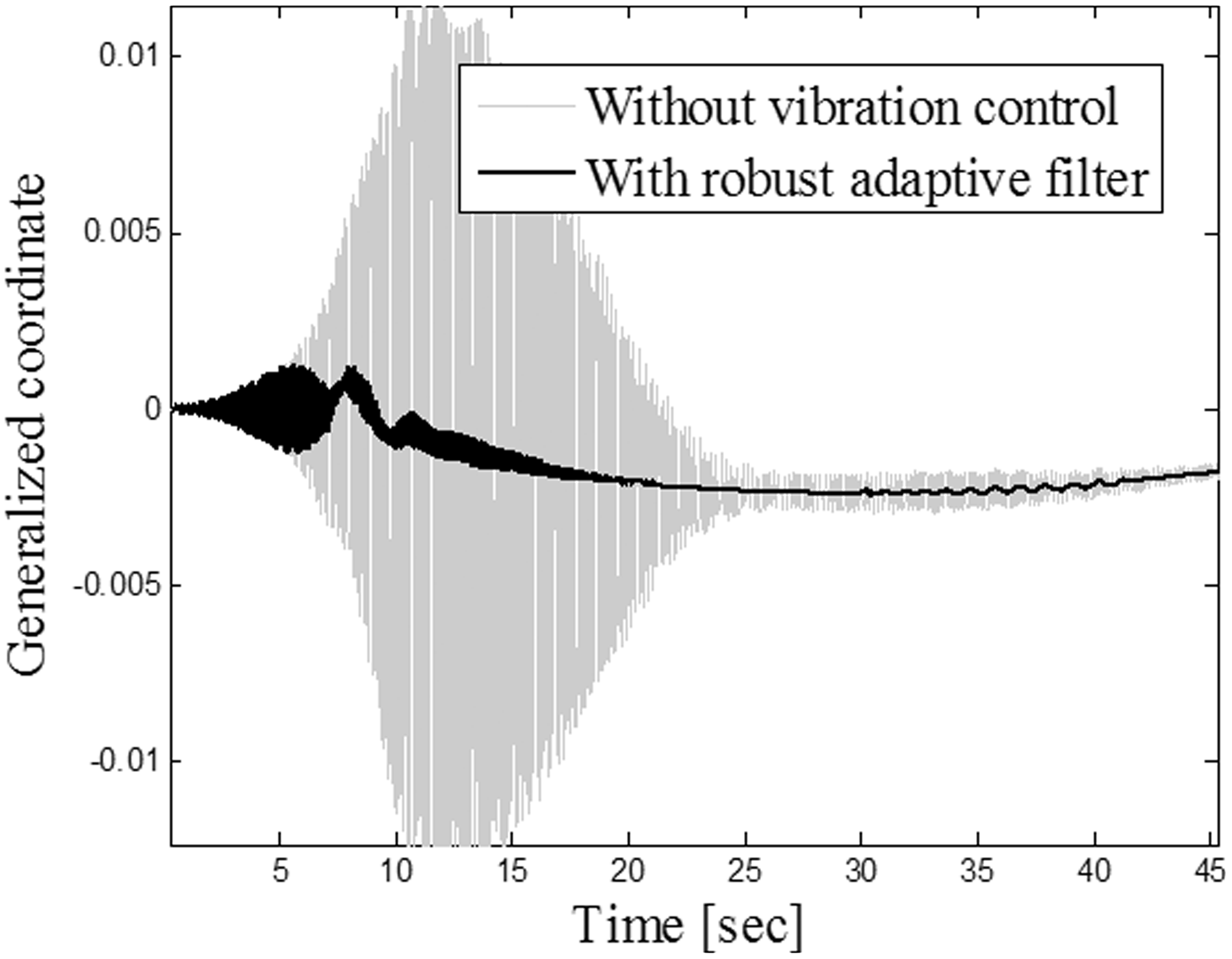
As mentioned in the results of simulation, the excitation of multiple vibrating subsystems is significantly reduced, or in some cases omitted. Decreasing the sloshing amplitude in particular ensures that the sloshing phenomenon has a negligible effect on the main system via the new robust adaptive vibration control system.
5. Conclusions
Vibration reduction of a system with multiple vibrating subsystems is one of the biggest challenges for flexible aerospace vehicles. Proposing a new control strategy in which the control system can simultaneously reduce the effects of multiple vibrating sub-systems has not been considered in flexible aerospace vehicles. In this paper, a new control strategy for the vibration reduction of three vibrating sub-systems is proposed and implemented for a nonlinear model of an ALV.
The new vibration suppression strategy is based on online multi-rate digital signal processing in which a DFT filter bank decomposes the INS output to alternative frequency bands. In this approach, because the process of vibration frequency estimation is implemented in sub-band—in contrast with previous approaches—the precision and speed of estimation are considerably improved. This improvement leads to an increase in the quality of vibration control. This is very important because the undesired performance of frequency estimation often leads to changes in closed-loop control stability margins. In addition, the robust stability of the proposed vibration control system is analysed using both L1 and
Footnotes
Conflict of interest
The author declares no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.