The governing equations of motion, together with the associated boundary conditions, are derived for the second strain gradient Timoshenko micro- and nano-beams. The second strain gradient theory is a highly powerful nonclassical continuum theory, capable of capturing the size effects in micro- and nano-scale structures. In case studies, the static and free-vibration behaviors of a hinged–hinged beam are investigated utilizing the presented second strain gradient theory-based Timoshenko beam model. The obtained results are compared with those of the available models in the literature, which are based on the (first) strain gradient theory, the modified couple stress theory, and the classical continuum theory.
In recent years, micro- and nano-beams have become prevalent in the field of micro- and nano-electro-mechanical systems (MEMS and NEMS) such as switches, resonators, actuators, and sensors (Fu and Zhang, 2010; Ghader et al., 2009; Jia et al., 2011; Moser and Gijs, 2007; Shirazi et al., 2013). Thus, some researchers have been interested in investigating their mechanical behavior (Abadyan et al., 2011; Davidson et al., 2011; Juillard et al., 2009). On the other hand, as shown in the literature, e.g. (Fleck et al., 1994; Lam et al., 2003; McFarland and Colton, 2005; Stolken and Evans, 1998), the classical continuum mechanics theory is not capable of prediction and explanation of the experimentally observed mechanical behaviors of the micro- and nano-scale structures. To overcome this deficiency, a number of nonclassical continuum theories have recently been developed to capture the size effects in micro- and nano-scale structures. The CS theory, the modified couple stress theory (MCS theory), the (first) strain gradient theory (SG theory), and the second strain gradient theory (SSG theory) are main examples of nonclassical continuum mechanics theories with some higher-order material constants in the constitutive equations (Mindlin, 1965; Toupin, 1962; Yang et al., 2002).
The modified couple stress theory, as one of the simplest nonclassical continuum theories with minimum higher-order material constants, has widely been employed to capture the size effects in many boundary value problems associated with micro- and nano-scale beams and plates (Asghari et al., 2010; Asghari and Taati, 2013; Kahrobaiyan et al., 2011).
Mindlin (1965) suggested a theory, called “the second strain gradient theory”, in which the dependency of the strain energy density for the material is considered dependent on both the first and second derivatives of the strain tensor, along with the strain tensor itself. Indeed, the couple stress theory is a special case of the theory in which the strain and gradient of rotation are only considered in the strain energy density. The constitutive equation for a linearly isotropic elastic material in the Mindlin’s theory has more than ten additional higher-order constants in comparison with the classical theory. If second derivatives of the strain tensor are neglected in the constitutive equation, “the (first) strain gradient theory” with five additional constants remains.
For an example of applications of the (first) strain gradient theory, see Kong et al. (2008), who employed it to study the static behavior and vibration response of an Euler–Bernoulli micro-beam. As another example, the size-dependent Timoshenko beam formulation has been presented by Wang et al. (2010). Moreover, a shear deformation micro-plate model was studied by Ramezani (2012). For more examples on the applications, you can refer to Kahrobaiyan et al. (2013), Vatankhah et al. (2013, 2014), and Zhao et al. (2012).
Recently, using the Euler–Bernoulli beam model, the mechanical behavior of cantilever beams has been analyzed based on SSG theory by Shodja et al. (2012) and Amiot (2013). More recently, the geometrically nonlinear governing differential equation of motion and corresponding boundary conditions of small-scale Euler–Bernoulli beams have been achieved using SSG theory (Karparvarfard et al., 2015).
In this paper, based on the SSG theory, the governing equations of motion and associated boundary conditions for Timoshenko micro-beams are derived. The variational approach is employed to achieve the formulation. Utilizing the derived formulation, size-dependent static and free-vibration behaviors of some beams are assessed. The results of the assessment are compared with the results corresponding to the previously available models in the literature, including the (first) strain gradient theory (SG theory), the MCS theory, and the classical theory (C theory).
2. Preliminaries
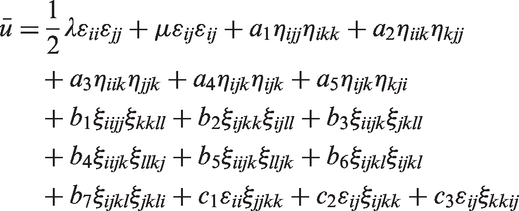
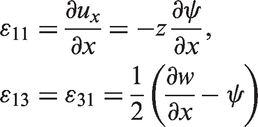
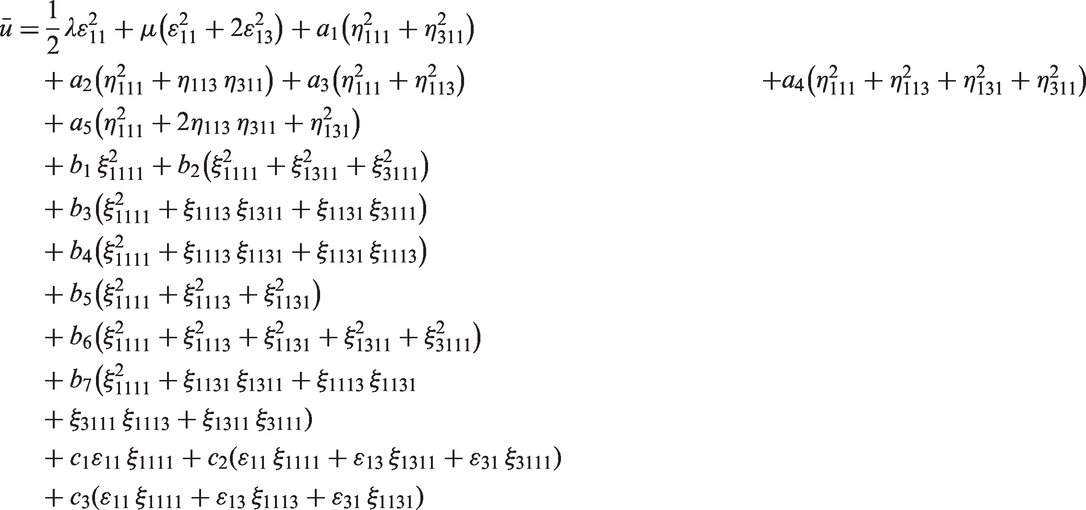
In the SSG theory, it is assumed that the strain energy density for a material is a function of the symmetric part of displacement vector (the strain tensor with the definition ), the second gradient of the displacement vector , and the third gradient of the displacement vector . Symbol ∇ represents the forward gradient operator. The most general component-style presentation of for an isotropic linearly elastic material in SSG theory is written in quadratic form as
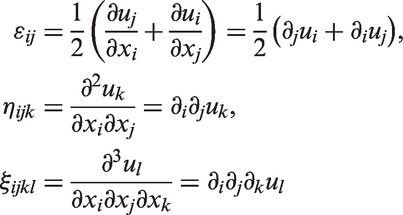
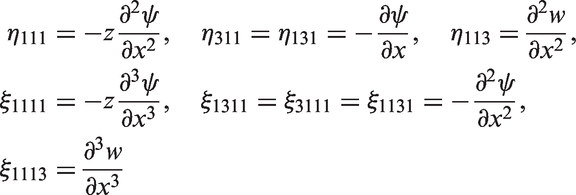
where λ and μ are the well-known Lame’s constants, and ai, bi and ci are higher-order material constants which particularly appear in SSG theory. The components of tensors , and are written in terms of the displacement components as
The conjugate stresses to these three kinematic parameters could be obtained by differentiating the strain energy density with respect to them, i.e.
The components , , and are respectively related to the classical stress, the first higher-order stress, and the second higher-order stress components.
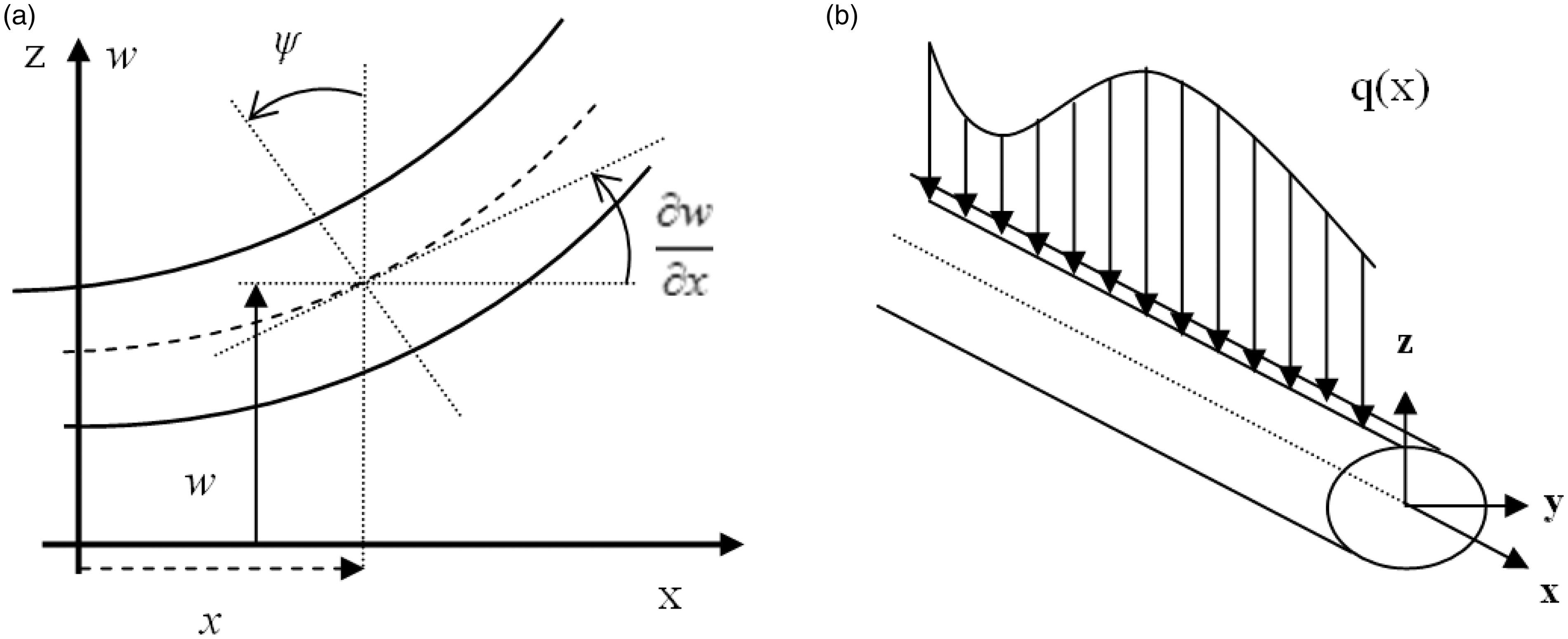
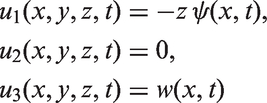
The coordinate system and kinematic parameters of a Timoshenko beam model are illustrated in Figures 1(a) and 1(b). The beam is assumed to be uniform, homogeneous and initially straight along the x-direction with length L. The plane contains the centroid of each beam section, and hence contains the bending line of the section. The displacement field in a Timoshenko beam model is written as
where u1, u2, and u3 denote the displacement components of the beam particles along x, y, and z directions of the coordinate system, respectively. It should be noted that in the Timoshenko beam model, cross sections remain plane after deformation; but, in contrast to the Euler–Bernoulli beam model, they do not generally remain perpendicular to the deformed axial line of the beam. Indeed, represents the lateral deflection of the beam and stands for the angle of rotation of the cross-sections.
A Timoshenko beam, (a) kinematic parameters (b) the loading, geometry and coordinate system.
In Figure 1, denotes the resultant of the tractions and body forces acting on the beam in transverse direction z as force per unit axial length.
3. The derivation of the governing equations and corresponding boundary conditions
Combination of equations (2) and (4) results in the nonzero components of the strain tensor as
The nonzero components of tensors and can similarly be obtained by substitution of equations (4) back into (2) as
Only considering nonzero components of tensors , , and , mentioned in equations (5) and (6), we simplify the general form of the strain energy density in equation (1) for the SSG theory Timoshenko beam as
with recalling that λ and μ are the well-known Lame’s constants, and ai, bi, and ci are higher-order material constants which particularly appear in SSG theory. It should be noted that Lame’s constants are related to the engineering parameters E, the Young’s modulus, and ν, the Poisson’s ratio, as , . Although there are established experimental methods to determine E and ν, or equivalently λ and μ, there are not yet standard experiments for the determination of the higher-order material constants ai, bi and ci. But, the need for determination of these constants for current engineering applications has motivated researchers to develop atomistic approaches to obtain these higher-order material constants. Shodja et al. (2012) calculated the higher-order material constants for some face centered cubic (fcc) materials in second strain gradient elasticity by atomistic approach via the Sutton–Chen potential. The results for aluminum are seen in Table 1.
The strain energy of the beam is obtained by integrating its density over its volume as
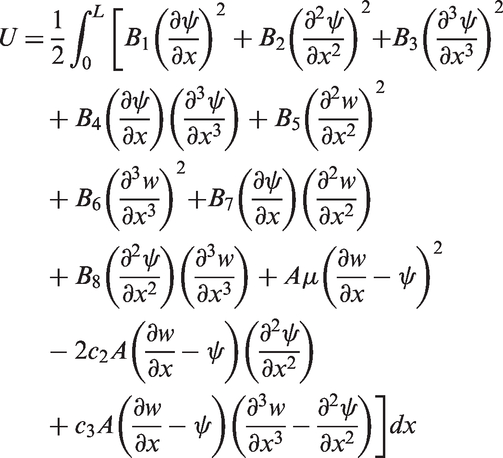
By substitution of equations (5) and (6) into (7), then the result into (8), for the strain energy of the Timoshenko SSG theory-based beam model it can be written
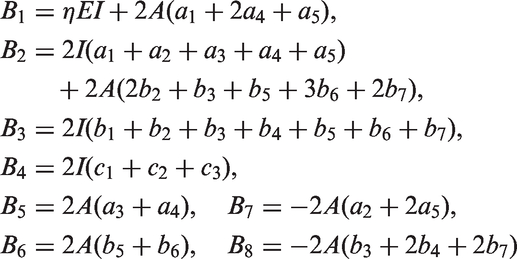
where
with , parameter A as the area of the beam cross section, and as the area moment of inertia of the cross section of the beam around y axis. To avoid the Poisson effect (as it is common practice in classical beam models), one should neglect the Poisson effect and set . The numerical results in this work will be presented with setting .
With the aid of the displacement field represented in equation (4), the kinetic energy of the beam can be written as
Which, because of the assumption of beam homogeneity, is simplified into
where
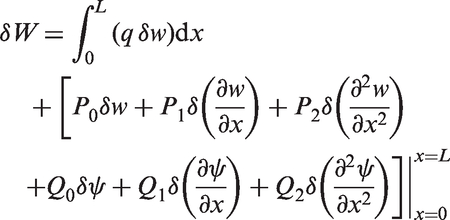
Now, we write the virtual work done by available loads on the beam, including body and boundary surface loads, during occurrence a variation in the geometrical state of the beam at given time as
where and are the end-sectional loads dual to corresponding kinematic parameters in performing work. These loads are indeed resultants of classical and higher-order stresses on the surface of an end-section.
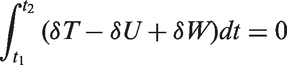
In this step, to derive the governing equation and the associated boundary conditions of the Timoshenko SSG theory beam model, the Hamilton principle is utilized as
where and are the variation of the previously described kinetic energy and the strain energy, respectively. Substituting equations (9), (11), and (14) into (15), then doing some mathematical operations in accordance with the variational calculus, one arrives at
Additionally, we obtain the associated boundary conditions at the Timoshenko SSG theory beam ends (i.e. ) as
In each equation of boundary conditions, there are two kinds of conditions: a natural (or loading) type and an essential (or geometric) type; we should consider one and only one of the two at an end-section of the beam.
It should be noted that to obtain the results for the (first) strain gradient theory from the presented second strain gradient formulation, it is sufficient to set and in equation (10). Additionally, if we set , the results for the classical theory are achieved. And, for the formulation of Timoshenko beam model based on the modified couple stress theory, we can also refer to Asghari et al. (2010).
For parametric study of the mechanical behavior of Timoshenko SSG theory-based beams, it is helpful to normalize the governing equations and the associated boundary conditions. To this end, the following dimensionless variables are defined
where κ is a constant that depends on the boundary conditions. The term represents the first frequency of the corresponding hinged–hinged Euler–Bernoulli beam. For example, for a hinged–hinged beam κ is taken equal to π, whereas for clamped-clamped and clamped-hinged beams, this parameter would be equal to and , respectively (Thomson and Dahleh, 1997). Rewriting the governing equations in terms of the newly defined variables, one has
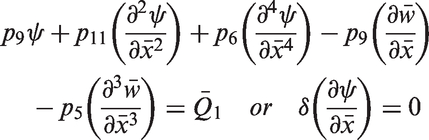
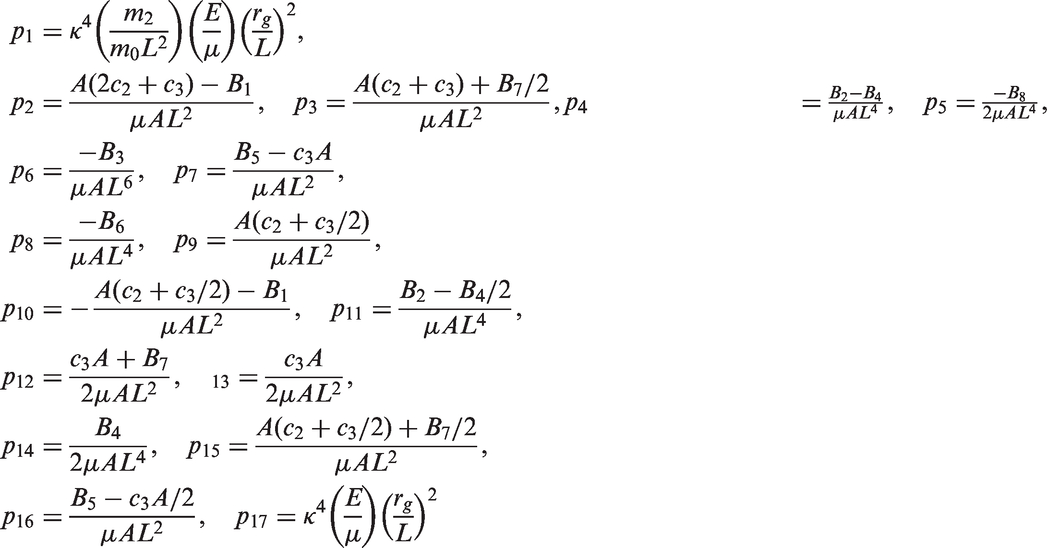
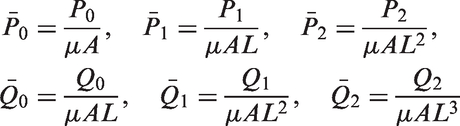
Here is the dimensionless transverse load intensity. Similarly, the boundary conditions in equations (18)–(23) are written in terms of the newly defined variables as
where the dimensionless parameters pi are related to material constants and geometrical features of the beam as
with rg as the gyration radius of the cross section of the beam (for rectangular cross sections, it is , with h as the height of the cross section). Moreover, the dimensionless end loads are
4. Case studies
To illustrate the capability of the presented Timoshenko SSG theory-based beam model to capture the size-dependent mechanical behavior of micro-scale structures, in this section static deflection of a beam and also free vibration of another beam are investigated based on the presented formulation. It is assumed the beams are made of aluminum, with , the lattice parameter Å, and higher-order material constant values given in Table 1. The beam cross section is also considered to be rectangular with . It should be noted that aluminum is a fcc metal, so it is anisotropic. However, the numerical results in the manuscript would be credible, because the height of the beam is being considered 3 times the lattice parameter and the width of the beam is being considered 6 times the lattice parameter, and also the length of the beam is much larger than the height. So, the beam is composed of many fcc crystals with random orientation. This makes it somehow reasonable to assume that the beam is materially isotropic in overall.
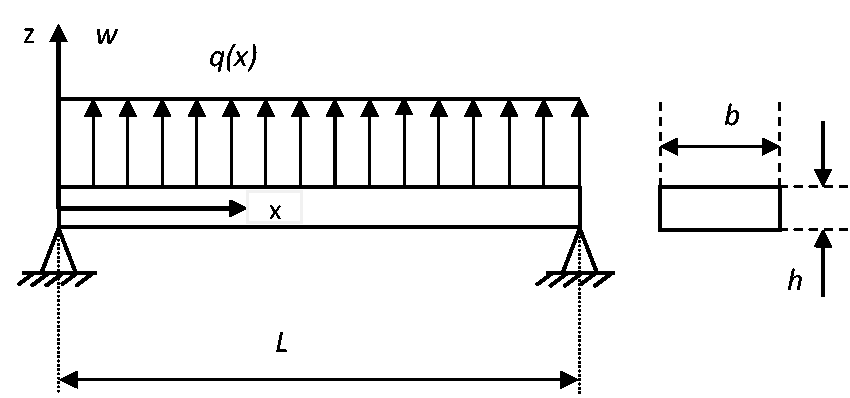
For static analysis, a hinged–hinged beam subjected to a constant transverse distributed force-per-unit-length q is considered (see Figure 2). The intensity of the transverse load is taken such that .
A hinged–hinged beam with uniform rectangular cross-section, its loading, geometry and coordinate system.
By omitting the time dependency of the functions appeared in equations (25) and (26) for the static cases, the governing equations of motions reduce to a set of ODE equations of equilibrium as
It should be noted that it is possible to reduce these Timoshenko beam model governing equations to Euler––Bernoulli beam model governing equation as a special case. Taking derivative of equation (35) with respect to , then subtracting the result from equation (36), then setting to , finally we get the single dimensionless equilibrium equation of the Euler–Bernoulli beam model based on the second strain gradient theory as
From general form of boundary conditions (28)–(32) for Timoshenko beam model, we write the following ones for the hinged–hinged beam
The possible classical shear stresses at any hinged boundaries of the beam can produce shear force P0, while the other classical and nonclassical stresses on the both ends of the hinged–hinged beam are not present. In other words, there is not any classical normal stresses and also higher-order stresses at the end sections; so in equations (28)–(32), we have .
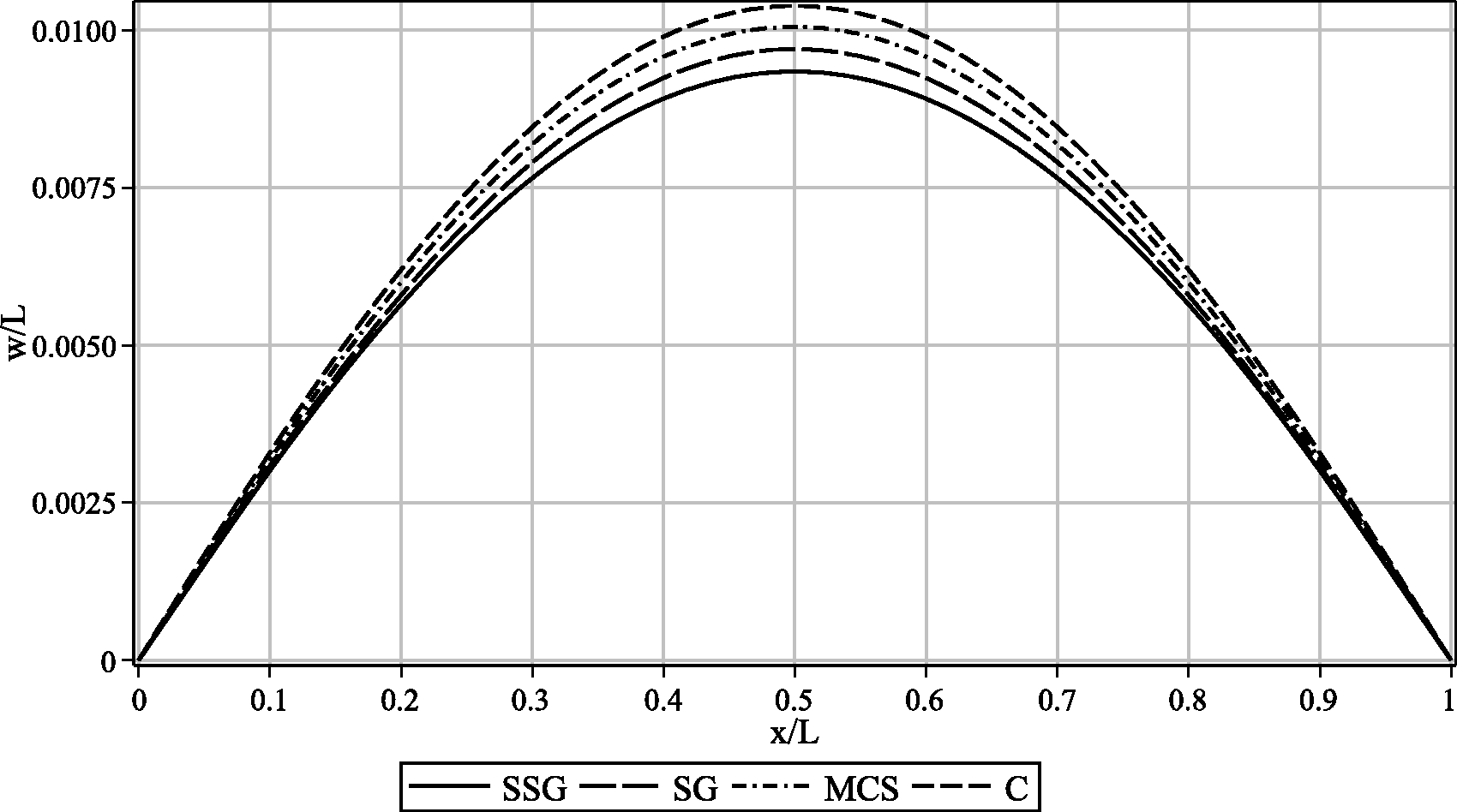
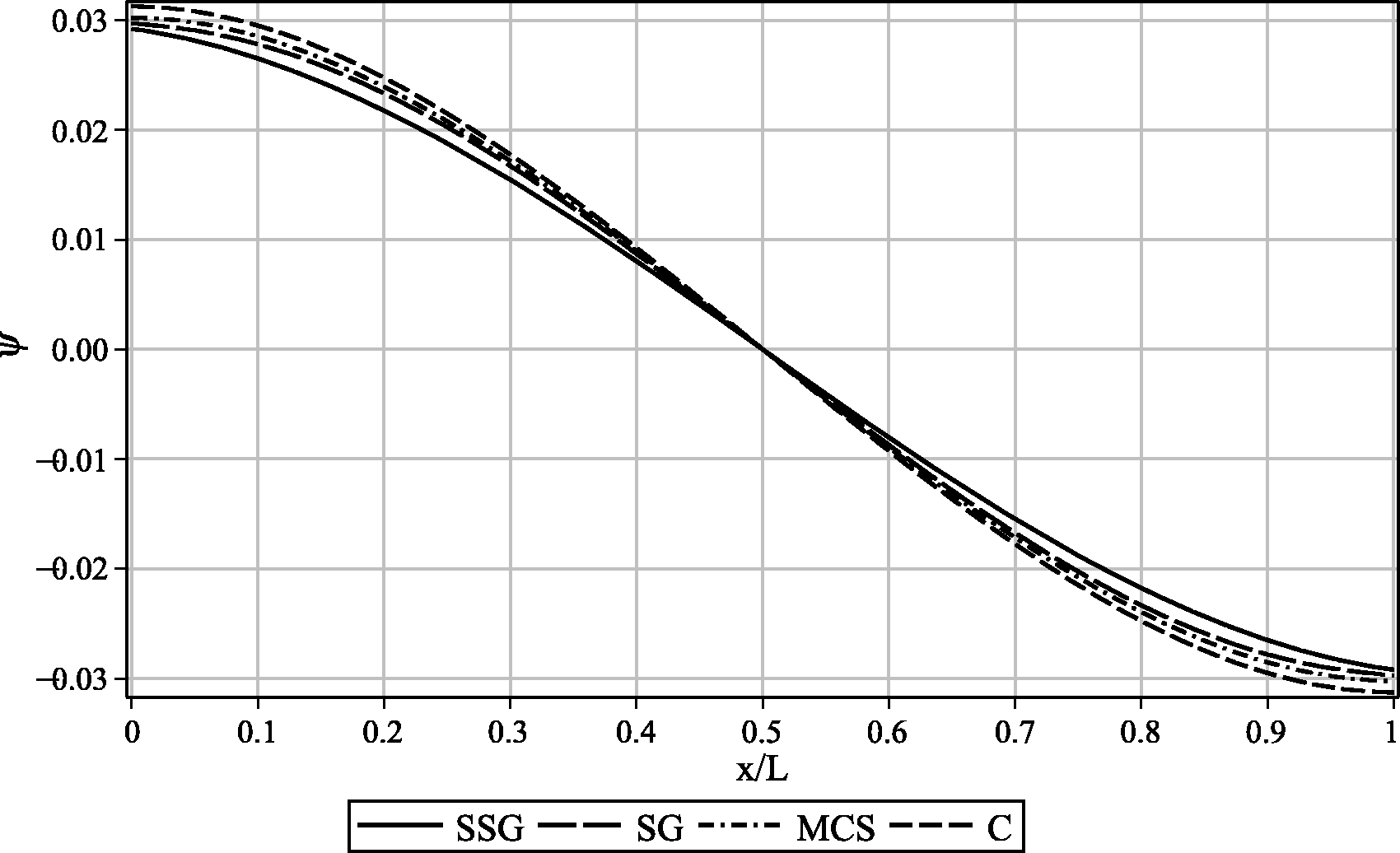
In Figures 3 and 4, the normalized deflection and rotation of beam cross-sections ψ along the beam are shown for L/h = 5 based on the SSG theory, the (first) SG theory, the MCS theory, and the C theory. The results in these figures have been obtained for . The maximum deflection occurs at the mid-section of the beam while the maximum rotation is seen at the two ends of the beam.
The static deflection of the hinged–hinged beam with L/h = 5. SSG (second strain gradient theory), SG (first) strain gradient theory), MCS (modified couple stress theory), and C theory (the classical theory).
The static sectional rotation of the hinged–hinged beam with L/h = 5. SSG (second strain gradient theory), SG (first) strain gradient theory), MCS (modified couple stress theory), and C theory (the classical theory).
From Figures 3 and 4, it is seen that the presented SSG theory-based model predicts a stiffer response in comparison with models based on other theories. According to Figure 3, the maximum deflection predicted by SSG theory-based model is approximately 11% lower than that of the classical theory; moreover, 8% and 4% lower than that of MCS and SG theories, respectively.
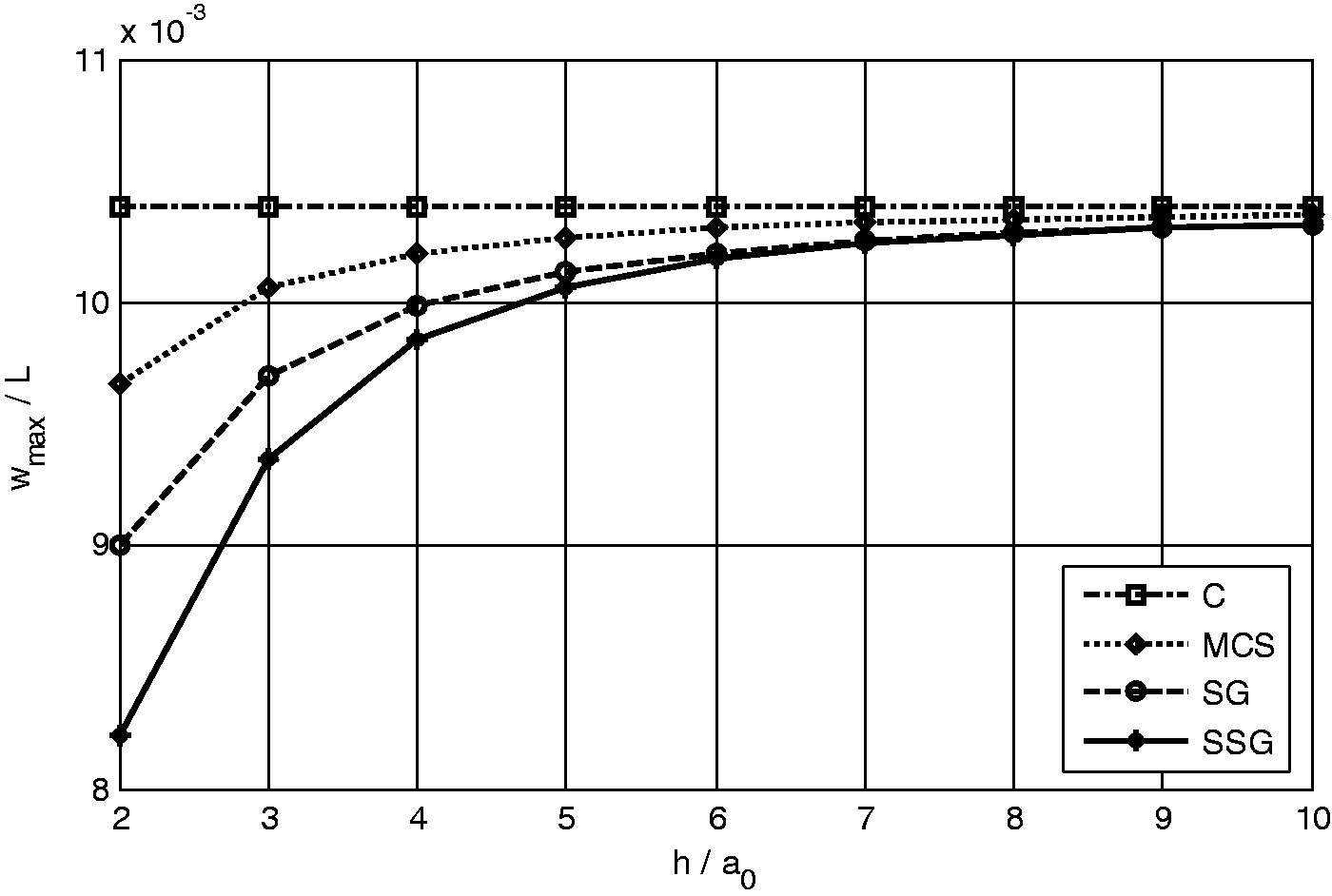
The maximum amount of deflection of the beam versus has been depicted in Figure 5. From the figure, it can be concluded that as height of the cross section becomes smaller, the difference between classical Timoshenko beam theory and the nonclassical theories is significant, and SSG theory results in stiffer behavior than other Theories. For , the difference between classical and nonclassical theories is not considerable.
The normalized maximum deflection of the hinged–hinged beam versus h/a0 for L/h = 5. SSG (second strain gradient theory), SG (first) strain gradient theory), MCS (modified couple stress theory), and C theory (the classical theory).
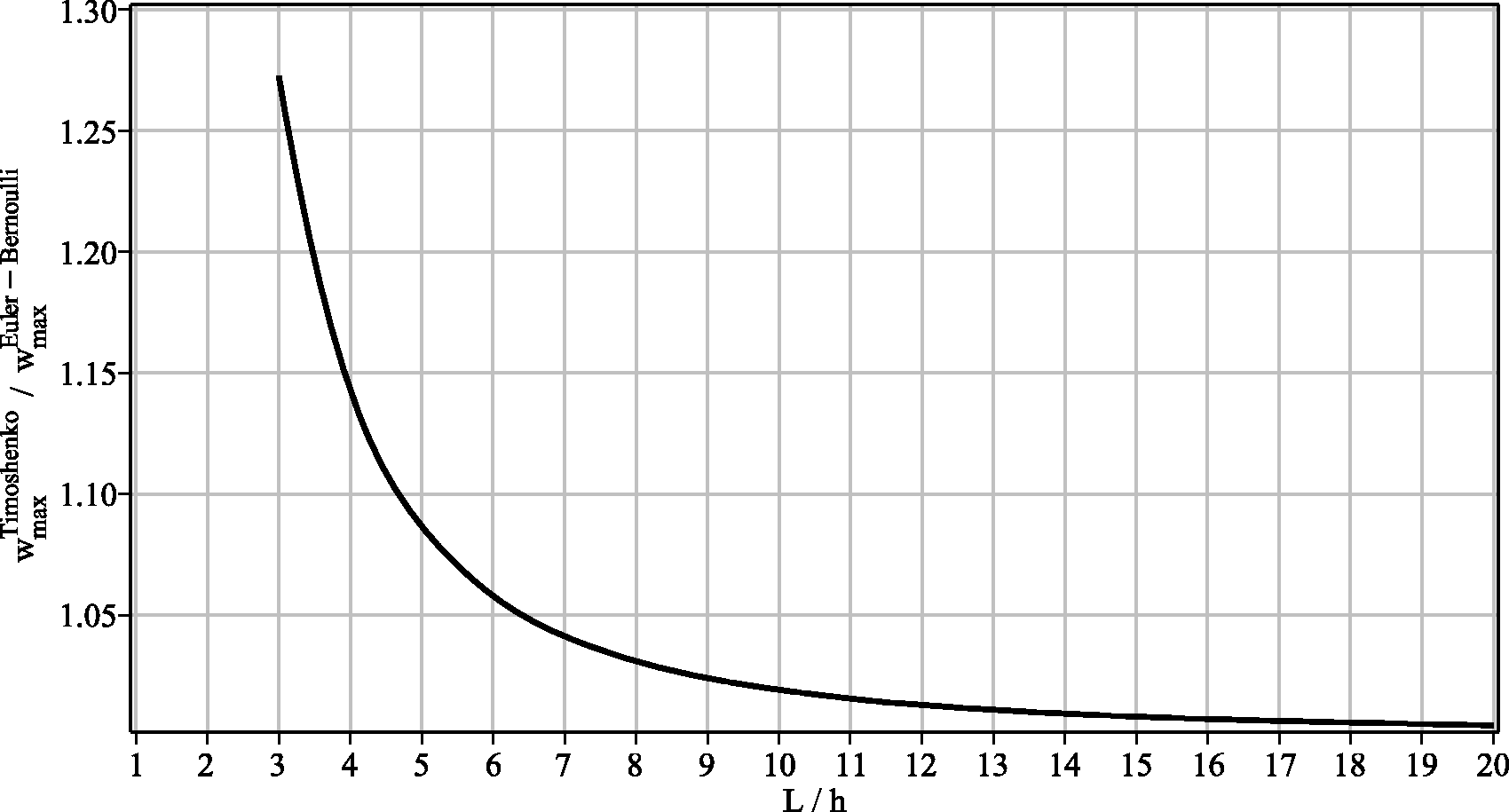
To study the effect of shear deformation on the static behavior of the second strain gradient beam, the ratio of maximum deflection obtained from Timoshenko model to that resulted from Euler–Bernoulli model has been depicted in Figure 6 for various L/h. It is seen the difference between the results of the two models is significant- regarding accurate analyses and design- for relatively short beams with practically important aspect ratios (e.g. L/h = 5).
The ratio of the maximum deflection obtained from Timoshenko model to that from Euler–Bernoulli model for various L/h.
Now, in this part of the paper the free-vibration behavior of a beam with the following boundary conditions is investigated
By considering Fourier series for the deflection and rotation functions as
all the mentioned boundary conditions are satisfied. Substituting equations (50) back into the governing equations (25) and (26), then letting for free vibration analysis, we obtain
where
To have nontrivial solutions for and in equation (51), the determinant of coefficients must vanish. Hence, the natural frequencies of the beam are the roots of the following algebraic equation
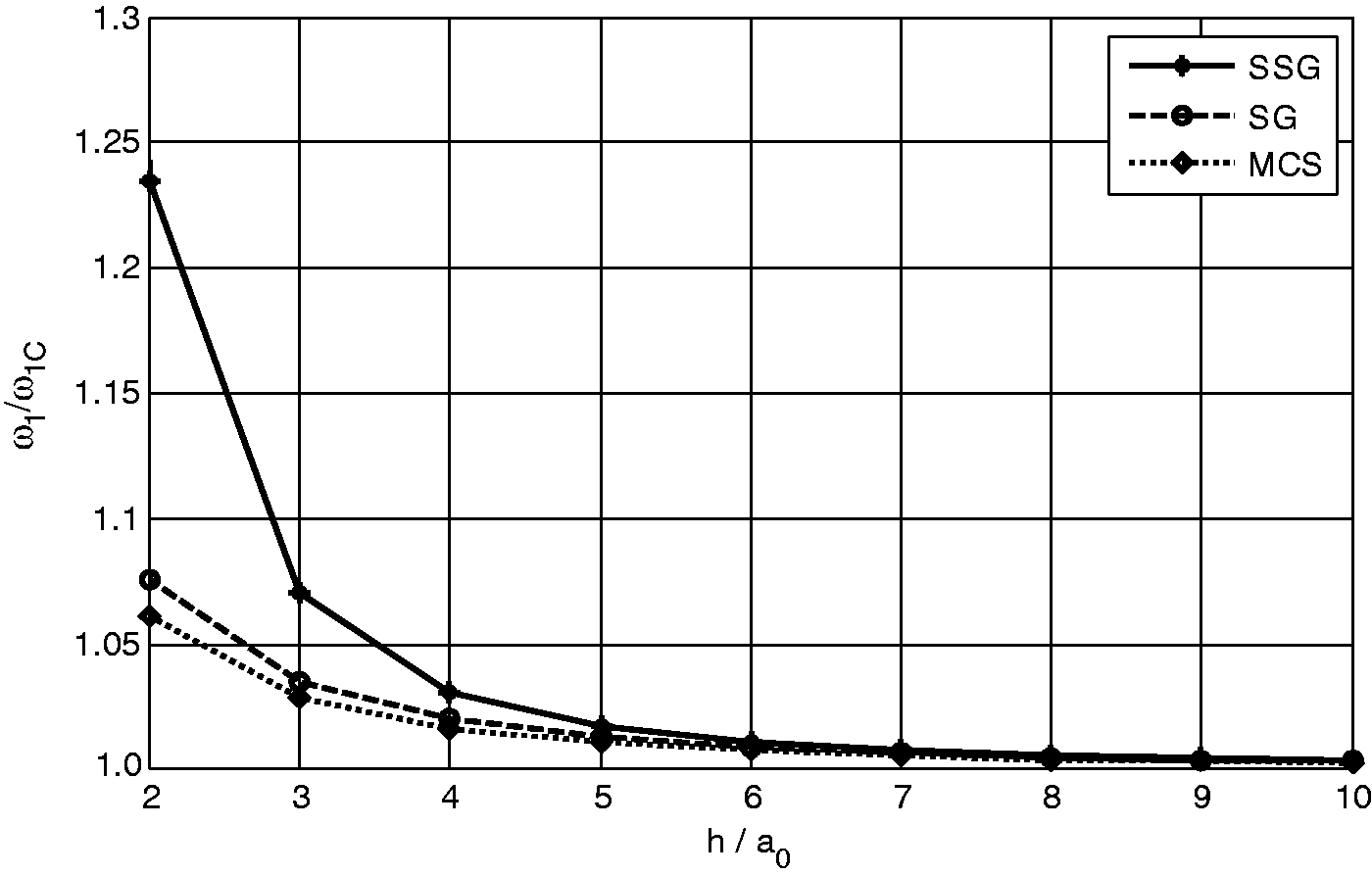
Figure 7 illustrates the first natural frequency of the presented second strain gradient theory-based model for slenderness ratio as a function of the dimensionless height of the section , while also provides an opportunity for comparison between the result of SSG theory-based model and other models, including (first) strain gradient theory, the modified couple stress theory and the classical theory-based models. In the figure, parameter stands for the first frequency of the classical theory-based model. It can be seen for greater than 4, the difference between the predictions of the presented SSG and those of SG and MCS theories is small; moreover, for the difference between results obtained from these three theories and those of the classical theory is negligible.
The normalized natural frequency of the beam versus h/a0 for L/h = 5. SSG (second strain gradient theory), SG (first) strain gradient theory), MCS (modified couple stress theory), and C theory (the classical theory).
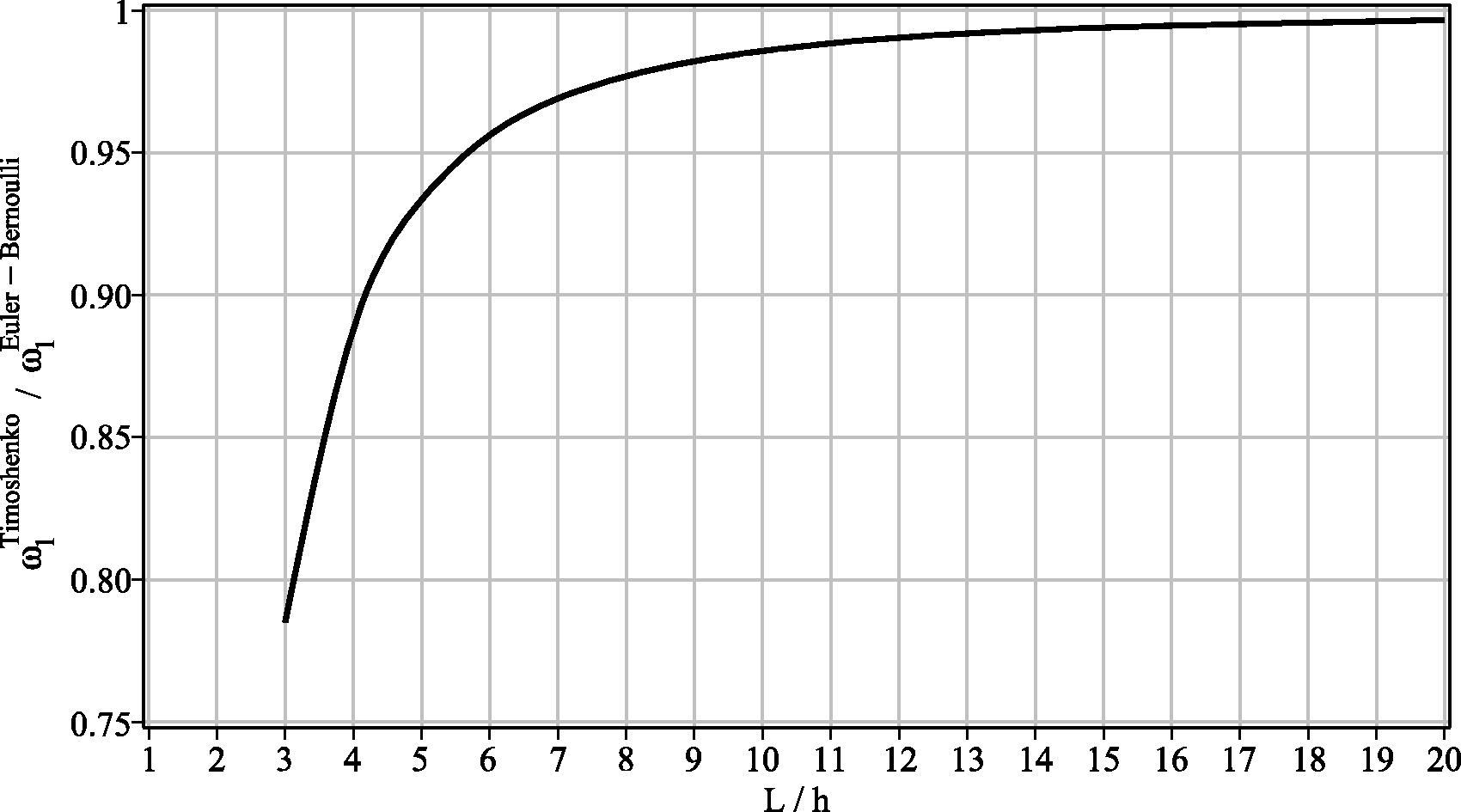
To investigate the effect of shear deformation on the natural frequency of the second strain gradient beam, the ratio of the ‘Timoshenko model’ natural frequency to the ‘Euler–Bernoulli model’ result has been depicted in Figure 8 for various slenderness ratio L/h. It is observed the difference between the results of the two models is considerable – regarding accurately analyzing and designing purposes – in case of relatively short beams with practically important aspect ratios (e.g. L/h = 5).
The ratio of the natural frequency obtained from Timoshenko model to that from Euler–Bernoulli model for various L/h.
5. Conclusions
In very recent years, nonclassical continuum theories have been widely used to analyze micro- and nano-scale structures. The SSG theory of Mindlin (1965), with 15 higher-order material constants, is a highly capable nonclassical theory in accurately capturing small-scale effects, compared with other nonclassical theories. It is because of the large number of material constants in its formulation, which can be adjusted in mechanical simulation of small-scale structures in different phenomena. In this paper, this theory has been employed to develop a size-dependent Timoshenko beam formulation. The governing equations of motion and the associated boundary conditions have been derived utilizing the Hamilton principle. In two different case studies, the static deflection and natural-vibration behavior of beams have been investigated with use of the derived Timoshenko SSG theory-based model, and the results have been compared with those of some previously available formulations in the literature.
References
1.
AbadyanMRBeniYTNoghrehabadiA (2011) Investigation of elastic boundary condition on the pull-in instability of beam-type NEMS under van der Waals attraction. Procedia Engineering10: 1724–1729.
2.
AmiotF (2013) An Euler–Bernoulli second strain gradient beam theory for cantilever sensors. Philosophical Magazine Letters93(4): 204–212.
3.
AsghariMKahrobaiyanMHAhmadianMT (2010) A nonlinear Timoshenko beam formulation based on the modified couple stress theory. International Journal of Engineering Science48: 1749–1761.
4.
AsghariMTaatiE (2013) A size-dependent model for functionally graded micro-plates for mechanical analyses. Journal of Vibration and Control19(11): 1614–1632.
5.
DavidsonBDSegheteDGeorgeSM (2011) ALD tungsten NEMS switches and tunneling devices. Sensors and Actuators A166: 269–276.
6.
FleckNAMullerGMAshbyMF (1994) Strain gradient plasticity: theory and experiment. Acta metallurgica et materialia42: 475–487.
7.
FuYZhangJ (2010) Electromechanical dynamic buckling phenomenon in symmetric electric fields actuated microbeams considering material damping. Acta Mechanica212: 29–42.
8.
GhaderRAhmadaliTZiaei-radS (2009) Nonlinear electrostatic behavior for two elastic parallel fixed–fixed and cantilever microbeams. Mechatronics19: 840–846.
9.
JiaXLYangJKitipornchaiS (2011) Pull-in instability of geometrically nonlinear micro-switches under electrostatic and Casimir forces. Acta Mechanica218: 161–174.
10.
JuillardJArndtGColinetE (2009) Enhancing the frequency stability of a NEMS oscillator with electrostatic and mechanical nonlinearities. Procedia Chemistry1: 1415–1418.
11.
KahrobaiyanMHAsghariMAhmadianMT (2013) Longitudinal behavior of strain gradient bars. International Journal of Engineering Science66-67: 44–59.
12.
KahrobaiyanMHAsghariMHooreM (2011) Nonlinear size-dependent forced vibrational behavior of microbeams based on a non-classical continuum theory. Journal of Vibration and Control18: 696–711.
13.
KarparvarfardAAsghariMVatankhahR (2015) A geometrically nonlinear beam model based on the second strain gradient theory. International Journal of Engineering Science91: 63–75.
14.
KongSZhouSNieZ (2008) Static and dynamic analysis of micro beams based on strain gradient elasticity theory. International Journal of Engineering Science47: 487–498.
15.
LamDCCYangFChongACM (2003) Experiments and theory in strain gradient elasticity. Journal of the Mechanics and Physics of Solids51: 1477–1508.
16.
McFarlandAWColtonJS (2005) Role of material microstructure in plate stiffness with relevance to microcantilever sensors. Journal of Micromechanics and Microengineering15: 1060–1067.
17.
MindlinRD (1965) Second gradient of strain and surface tension in linear elasticity. International Journal of Solids and Structures1: 417–438.
18.
MoserYGijsMAM (2007) Miniaturized flexible temperature sensor. Journal of Microelectromechanical Systems16: 1349–1354.
19.
RamezaniS (2012) A shear deformation micro-plate model based on the most general form of strain gradient elasticity. International Journal of Mechanical Science57: 34–42.
20.
ShiraziMJSalariehHAlastyA (2013) Tip tracking control of a micro-cantilever Timoshenko beam via piezoelectric actuator. Journal of Vibration and Control19(10): 1561–1574.
21.
ShodjaHMAhmadpoorFTehranchiA (2012) Calculation of the additional constants for fcc materials in second strain gradient elasticity: behavior of a nano-size Bernoulli-Euler beam with surface effects. Journal of Applied Mechanics79(2): 021008.
22.
StolkenJSEvansAG (1998) Microbend test method for measuring the plasticity length scale. Acta Materialia46(14): 5109–5115.
23.
ThomsonWTDahlehMD (1997) Theory of vibrations with applications, fifth ed. Upper Saddle River, New Jersey: Prentice Hall.
24.
ToupinRA (1962) Elastic materials with couple-stresses. Archive for Rational Mechanics and Analysis11: 385–414.
VatankhahRNajafiASalariehH (2014) Exact boundary controllability of vibrating non-classical Euler–Bernoulli micro-scale beams. Journal of Mathematical Analysis and Applications418: 985–997.
27.
YangFChongACMLamDCC (2002) Couple stress based strain gradient theory for elasticity. International Journal of Solids and Structures39: 2731–2743.
28.
WangBZhaoJZhouS (2010) A micro scale Timoshenko beam model based on strain gradient elasticity theory. European Journal of Mechanics-A/Solids29: 591–599.
29.
ZhaoJZhouSWangB (2012) Nonlinear microbeam model based on strain gradient theory. Applied Mathematical Modelling36: 2674–2686.