Global vibrational behaviour of a single degree-of-freedom (SDOF) oscillator subjected to Coulomb type of dry frictional constraint and harmonic excitation is investigated in this paper. To obtain a numerical solution to the non-smooth dynamical problem, the equation of motion is discretized in the time domain by means of the implicit Bozzak-Newmark scheme. An algebraic equation governing the current state of the system is obtained in terms of its velocity. Utilizing the fact that the frictional constraint can be completely characterized by two scenarios - (i) forward sliding or stiction with a tendency to move forward, and (ii) backward sliding or stiction with a tendency to move backward, two coupled linear complementary equations are deduced. With the reduction of the non-smooth dynamical problem to a linear complementarity problem (LCP) in terms of supremum velocities and slack forces, the rapid and endless switches from sliding to stiction, and vice versa, in a vibration problem, are automatically detected and handled effectively. This is superior to the event-based methods and analytical methods available in the literature. Numerical results obtained using the proposed method are compared with the analytical solutions for harmonically excited dry-friction oscillator with ordinary behaviour; excellent agreement is observed. The proposed method is then employed for determining the global chaotic and deterministic behaviour of a harmonically excited dry-friction oscillator with system and excitation parameters varying in wide ranges.
Dry friction is present in various mechanical systems. Friction can significantly affect the dynamical behaviour of a mechanical system in a non-smooth and non-linear manner. As a result, studies of friction and friction-induced vibration phenomena have received considerable attention in the literature.
Ferri and Whiteman (2007) studied stability of a single degree-of-freedom (SDOF) vibration system with viscous damping and Coulomb friction. Natsiavas (1998) investigated the stability problem of a harmonically excited oscillator with piecewise linear characteristics. Ossowski (1999) used the optimal Lyapunov function and studied the stability of a damped oscillator with dry friction. Oancea and Laursen (1998) investigated the low frequency stick-slip motion of a vibrational system involving frictional contact and harmonic excitations experimentally and numerically. Hong and Liu (2000) obtained responses of a Coulomb-friction oscillator subjected to harmonic excitations. Cheng and Zu (2002) presented analytical solutions for dynamic responses of an SDOF system with combined Coulomb friction and viscous damping under two frequency excitations. Liang (2005) studied Coulomb and viscous damping effects for a linear SDOF using a numerical method. Stein et al. (2008) analysed an SDOF oscillator with linear viscous and dry friction damping. Luo and Gegg (2006a) studied the influences of harmonic excitations and friction forces on the stick motion and non-stick motion of oscillators. Luo and Gegg (2006b) also investigated analytically the stick and non-stick motion of a linear oscillator mechanism with dry-friction, and obtained the local stability and bifurcation conditions for periodic motions. Several studies have been devoted to the analysis of dynamic behaviour of non-linear dry friction systems. Nacivet et al. (2003) proposed a Lagrangian frequency-time method to study the non-linear steady state response of systems subjected to dry friction under periodic excitations.
The bifurcation and chaotic behaviour are of major importance for non-linear dry friction systems (Galvanetto, 1997). Casini and Vestroni (2004) and Casini et al. (2006) investigated the dynamical behaviour of two mechanical systems subjected to multiple displacement sensitive frictional contact interactions. Batako et al. (2007) research presented numerical results for bifurcations of a friction-driven vibration system. Galvanetto (2001) discussed two discontinuous bifurcation phenomena in a simplified mechanical system with dry friction. Savi et al. (2007) developed a smoothed switch model for handling the dynamical jumps, bifurcations and chaos of a non-smooth system. Licskó and Csernák (2013) studied the chaotic behaviour of a Coulomb-type dry-friction oscillator and pointed out the possibility of transient chaos.
A dry-friction oscillator subjected to external excitations can exhibit some complex dynamical behaviour due to the non-smooth or discontinuous constraint. There is lack of effective methods in the literature to deal with dry friction in a vibration system. In this paper, the procedure, described by Yu and Wen (2013) for handling the ordinary dynamical behaviour of vibration systems with dry friction and identical static and kinetic coefficients, is extended to deal with vibration systems with distinct static and kinetic coefficients of friction. The equation of motion of system is discretized in the time domain using the implicit Bozzak-Newmark scheme. At each time, we introduce two sets of complementary variables (the supremum velocity and slack force) for each of the two likely scenarios – (i) forward sliding or stiction with a tendency to move forward, and (ii) backward sliding or stiction with a tendency to move backward. A trivial state concerning stiction without tendency to move either way is a particular case in (i) and (ii) with net zero external force. A set of two linear complementary equations are obtained and solved using the Lemke algorithm for the two sets of complementary variables. The state of the system is then obtained from the complementary variables using a simple post-processing scheme. Using the proposed method, dynamical behaviour of a dry-friction oscillator is investigated for a wide range of system and excitation parameters.
For most engineering problems, the kinetic and static coefficients are different. As a result, the generic coefficient of friction used in defining the slack force is no longer a constant, instead is dependent upon the relative velocity between the system and its support. This relative velocity is unknown before a solution is obtained. The difference is known to be the driving factor for bifurcation of dynamical systems subjected to dry frictional constraints. From the view point of the mathematical methods, assumption of equal static and kinetic coefficients of friction naturally leads to a standard LCP. An iterative or updated scheme is presented in this paper to solve the nonlinear complementarity problem.
The proposed method is advantageous to the event-based analytical and numerical methods available in the literature in that no prior assumption of occurrence of an event is needed. The proposed method detects the occurrence of non-smooth related physical phenomena and switching from one phenomenon to another automatically and determines the state at a time step by solving a nonlinear complementarity problem using an iterative scheme for LCP. In addition, the proposed scheme can be extended to multiple body dynamical system with dry frictional constraints. The proposed method is ideal in seeking a long term solution to a non-smooth dynamical system because of its efficiency, accuracy and reliability.
2. Description of problem numerical procedure
2.1. Description of problem
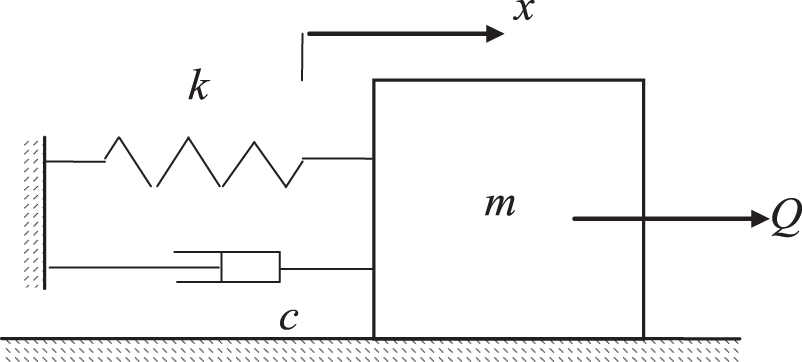
For a mass-damper-stiffness oscillator subjected to dry friction and an external excitation, its equation of motion may be written as
where m is the mass of the block; k is the stiffness constant of the linear springs; c is the viscous damping coefficient; is the excitation; F is the frictional force. The contact between the block and the rough surface is maintained through the application of an external time-varying or constant normal force .
According to Coulomb’s law of friction, there are three distinct states of the frictional interaction between the block and the rough plane. They are forward sliding, stiction and backward sliding. The frictional force for each state can be written explicitly as
It can be seen that for non-zero velocities or sliding motion, the frictional force is uniquely defined. However, for zero velocity or stiction, the frictional force, bounded by the extreme values, cannot be determined from Coulomb’s law alone. For a vibration problem, this dependence yields a non-smooth and nonlinear feature and is the source of chaotic behaviour.
Introducing the following generic coefficient of friction, which is velocity-dependent,
For oscillatory motion, the velocity of the block relative to the support reaches zero on a regular or irregular basis. The state of the frictional interaction varies constantly from sliding to stiction or from stiction to sliding. As a result, the magnitudes of the frictional force change abruptly at the two transitional points. During stiction, magnitudes of the frictional force vary with the effective force until the maximum Coulomb force is reached.
For a sinusoidal excitation and a constant normal force, it is possible to obtain an analytical solution to equation (1) using a traditional stitching scheme. However, the process can be very tedious. Here a numerical method is proposed instead.
2.2. A velocity-based numerical scheme
In a vibration problem, the velocity of the system can be exactly zero at a single moment or over a time duration, often called the stiction phenomenon in the literature. It is imperative that a numerical method predict the occurrence of zero velocity in order to simulate physics phenomena correctly.
To simulate vibrational motion over a large number of cycles or periods of excitation, an implicit numerical scheme, Bozzak-Newmark, is advantageous. This implicit scheme is not known to show any drifting phenomenon commonly suffered by low order explicit schemes. To obtain a numerical solution, the entire simulation time is divided into n intervals of equal time step h, here , , and . The step size is often determined on the basis of the highest frequency or shortest period of vibration and the well-known sampling theorem. However, in practice, to achieve better accuracy, the four-point rule or even the 10-point rule is often obeyed. If the state of the system at tj is known, then the state of system at is determined by solving the following differential equations
where is the Bozzak relaxation factor; subscripts j and in the above equation represent times tj and , respectively. Using the Newmark integration scheme, the kinematical variables (displacement, velocity and acceleration) at and are related by the following equations
where and are the Newmark coefficients of integration. The following ranges of relaxation parameters must be observed for numerical stability
In this paper, the following values are used: , , and .
To handle the velocity-driven frictional forces, the acceleration and displacement vectors are expressed in terms of velocity as follows
The frictional force in equation (9) is characterized by the following equality and inequality constraints
At time , the block under a compressive external force or , the following equation of equilibrium holds and can be used to obtain the normal contact force at the interface
Since , we multiply equation (11) by , we obtain the following equivalent equation of equilibrium in the normal direction
Equation (9) cannot be solved in a straight forward manner because the frictional force , governed by the mixed equality and inequality equations at , is unknown. In this paper, an iterative LCP formulation for solving the non-smooth problem is presented.
2.3. An iterative linear complementarity problem formulation
To effectively handle the non-smooth frictional forces, we classify the state of the mass at time into the following two scenarios: (i) sliding motion or tendency of motion in the positive coordinate direction, and (ii) sliding motion or tendency of motion in the negative coordinate direction. No tendency to move is not explicitly covered by this classification, it is recognized that this is actually a special state of stiction or tendency to move of scenario (i) or (ii) with lack of net external force in the concerned direction of motion. Since the frictional force is always against the motion and the tendency of motion, Coulomb’s law of friction may be written as or for the first scenario, and or for the second scenario. With this classification, equation (10) may be rewritten in a more compact form as
Let’s first turn our attention to the first scenario, . We introduce the following two non-negative variables
where is the magnitude of velocity for ; is the slack force, is the difference between the maximum Coulomb frictional force and the actual frictional force for .
It can be verified that the non-negative variables, and , satisfy the complementary condition . The argument is that if , , the forward sliding must have occurred. As a result, the frictional force must have reached the critical value of . With the consideration of the direction of motion, we have or . On the other hand, if , we can conclude that velocity or must be zero. In summary, the frictional force may be described in a compact form as
Similarly, we can handle the scenario that the mass moves or has the tendency to move in the negative coordinate direction, or . The frictional force points to the positive coordinate direction. Introducing the following two variables
The frictional constraint for the second scenario may be written as
Collectively, the two sets of non-negative complementary vector pairs characterize the state of frictional interaction between the mass and the rough support within the context of Coulomb's law of friction. More importantly, velocity , positive, negative or zero, can always be obtained from and as follows
Substituting equations (15), (18) and (20) into the above equations, after some re-arrangements, we obtain
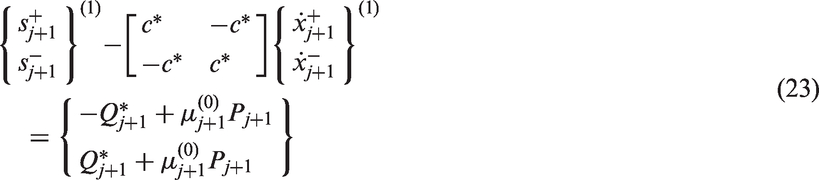
The above equation along with the non-negative and complementary conditions in equation (16) and (19) constitutes a standard LCP for given . Unfortunately, is dependent on velocity or values of and , and equation (22) cannot be solved directly. For this reason, we may introduce an iterative LCP scheme. The two pairs of complementary variables from the first iteration are obtained by solving the following equations
where and .
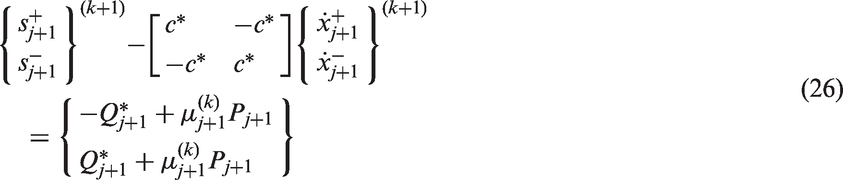
Once the above equations are solved, we can update the coefficient of friction and continues with the next iteration. The following recurve scheme may be used to obtain a solution
A one-step update () is adopted in this paper. Numerical results obtained for a simple oscillator studied by show that the one-step updated reduces the acceleration spikes occurring at the transitional points.
3. Numerical results and discussions
In this section, Behaviour of an SDOF system shown in Figure 1, subjected to a harmonic excitation, is investigated using the proposed procedure for various combinations of parameters. Before presenting extensive numerical results, an exact analytical solution and an approximate analytical solution are presented and used for validating the proposed procedure.
Illustration of a 1-DOF vibration system subjected to Coulomb dry friction.
3.1. An exact analytical solution
In this section, we first seek an exact analytical solution for the one DOF system, shown in Figure 1, subjected to a harmonic excitation . Because of the tedious process, the exact solution is sought only for a short period of time from the initial state. These two analytical solutions will be used to validate the proposed numerical method.
The equation of motion of the system may be written as
where F is the frictional force. In a way to similar to reference (Licskó and Csernák, 2013), the above equation may be non-dimensionalized with the variable transformations and . The non-dimensional equation of motion may be written as
where , the frequency ratio; , the frictional force normalized to the amplitude of excitation; the double prime represents the second order derivative with respect to the non-dimensional time.
An analytical solution to equation (28) may be obtained if the initial state of the frictional constraint is known. Without loss of generality, the mass is assumed to move initially in the positive coordinate direction with a non-zero velocity . This forward motion is expected to continue for some time under the influence of the non-impulsive applied and spring forces. During this period , here T1 is the precise moment at which the mass comes to a stop, the non-dimensional frictional force is , where . A solution to equation (28) may be written as
Using the initial conditions at , we can find the two unknown constants in the above equation. They are
The displacements, velocities and accelerations are computed at , here , . As the kinematical variables are computed, the velocity of the block is monitored. If the velocity is zero at , then the calculations of kinematical variables by means of equation (29) end. The block enters into the next phase of motion – stiction, momentarily, for a certain duration or even permanently, depending on the ensuing development of the effective force (the combination of the excitation and spring forces). Very often, is not a zero velocity moment. Rather, is the moment just before T1. In this case, T1 falls in a small time interval . Its exact value may be found by solving the following transcendental equation by means of the bisection method or a different zero-root finding numerical scheme.
In this paper, we use the bisection method with a specified error of 1.0E-12.
Now that at , the velocity is zero. The displacement may be found using equation (29). The acceleration of the block and the frictional force may be determined from equation (28). It is noted that there are two unknowns in this single equation. If the magnitude of the normalized effective force, , is less than the maximum normalized Coulomb force, , stiction occurs. Otherwise, the block will slide backward in the negative coordinate direction. If the block does stick to the support for the duration , the following equation may be used to determine the end time
In the above equation, the argument of is positive and returns a positive principal value. As the magnitudes of effective force increase, the frictional force increases accordingly. At , the frictional force reaches its maximum value. Any further increase in the effective force will yield a non-zero acceleration (negative), and causes the block to slide backward.
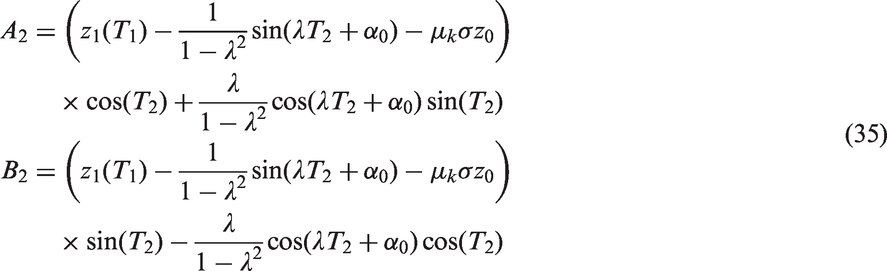
For the backward sliding motion, the frictional force changes to . A solution to equation (28) may be written as
From the continuity conditions at , we have
The two unknown constants may be obtained by solving the above algebraic equations. For reference, they are given below
In a way similar to the forward sliding, the displacements, velocities and accelerations may be computed for backward sliding using equation (33) at , here , . The zero velocity point may be found by solving the following transcendental equation in the small interval by means of the bisection method
Once again, an error of 1.0E-12 is specified in the root searching.
3.2. An approximate analytical solution
Neglecting the stiction phenomenon, Inman (2008) obtained an approximate analytical solution for the steady state response of the same oscillator for based on the equivalent energy loss in an excitation cycle. For reference, Inman’s approximate non-dimensional steady state amplitude is presented below
Before discussing any specific phenomenon concerning the rather complex stick-slip motion of the SDOF dry-friction oscillator, we introduce two parameters – the mean amplitude and the mean asymmetry of the steady state motion.
where and are the maximum and minimum displacement after a steady state response is reached sufficiently long period of time has elapsed from the initial. In this paper, an elapsed time of is used to determine the two parameters. Here T is the period of excitation.
As the first validation test, a numerical solution to equation (28) is obtained for displacements, velocities and accelerations using the proposed method in Section 2 with a time step of for the following parameters: . The same kinematical variables are also computed from the exact analytical solution using the same time step. The two sets of kinematical variables are plotted together in Figure 2. For the analytical solution, the results are obtained only for the first complete cycle of forward sliding, stiction and backward sliding motion. It can be seen that the proposed numerical method yields results that are in excellent agreement with the exact analytical solution. Small oscillations in the computed accelerations are observed at the beginning of the stiction motion.
Comparison of results obtained using the proposed method with the exact analytical solution.
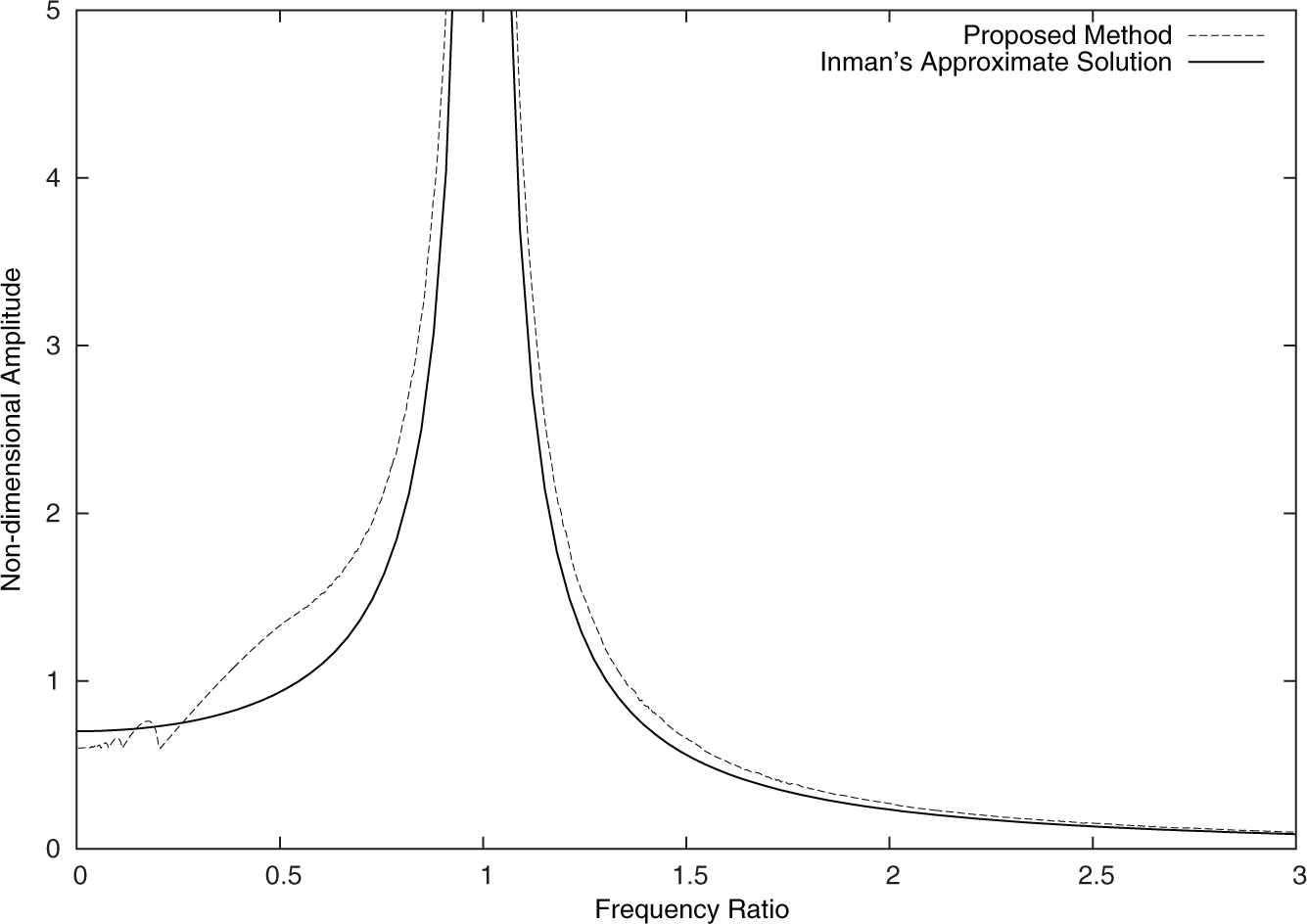
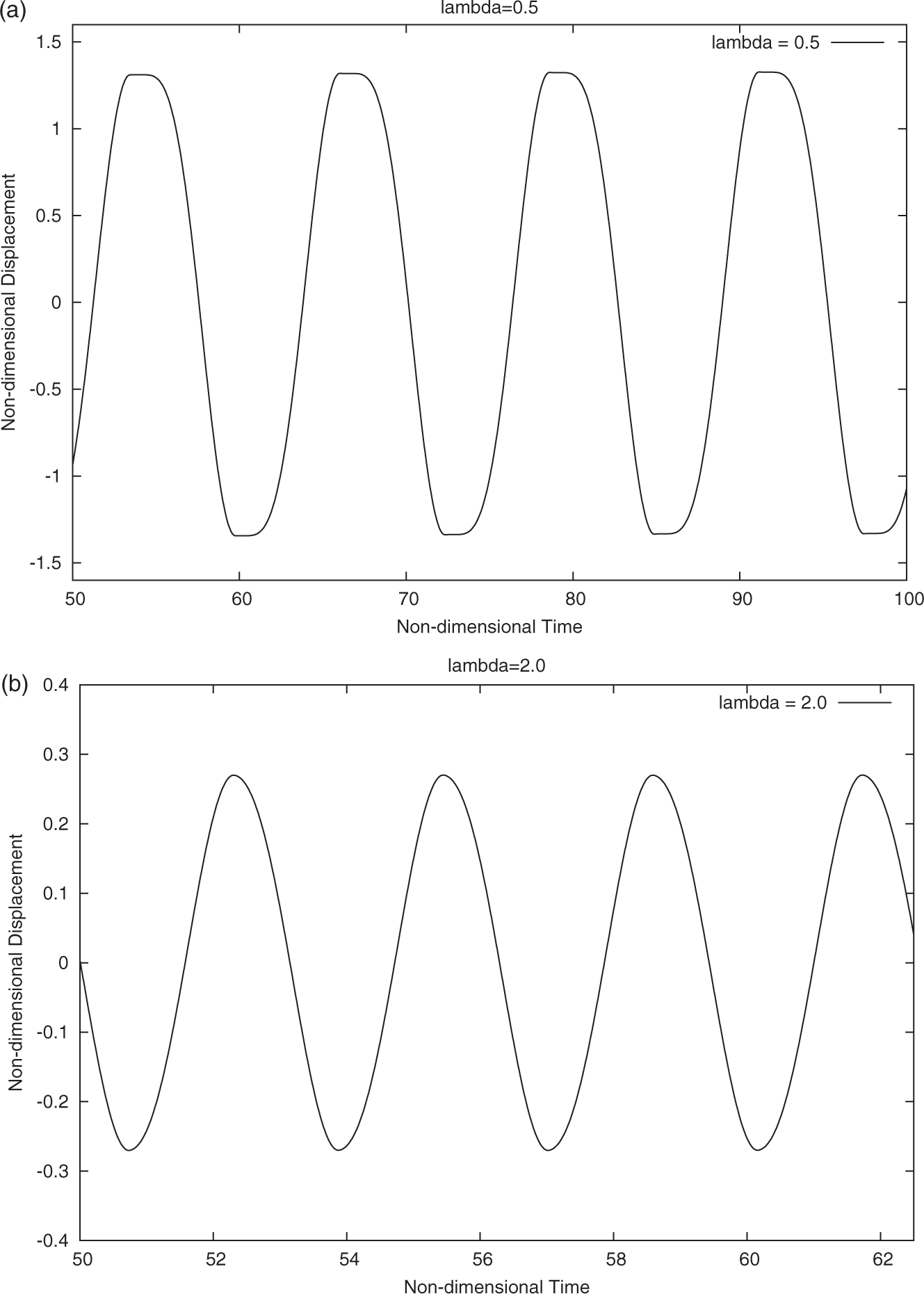
In the second validation test, the approximate amplitudes of the long-term vibration are obtained using equation (37) for and over a range of excitation frequencies. The numerical solutions are also obtained using the proposed method for the same oscillator with zero initial displacement and zero initial velocity. The frequency response curves of the steady state motion determined using the two methods are plotted together in Figure 3. It can be seen that Inman’s approximate solution agrees well with the numerical solutions for excitation frequencies above the resonant frequency. This is because stiction is not captured in Inman’s approximate solution and the stiction duration is very small compared to the slip duration in an excitation cycle. However, for excitation frequencies below the resonant frequency, the stiction duration tends to last longer in comparison with the slip duration in an excitation cycle. As a result, Inman’s approximate solutions are noticeably different from the numerical solutions. A snapshot of each of the steady state responses for four excitation cycles under a sub-critical frequency excitation () and a super-critical frequency excitation () in Figure 4 shows the phenomenon.
Comparison of results obtained using the proposed method with Inman’s approximate analytical solution.
Non-resonant motion of a dry friction oscillator under sub-critical and super-critical frequency excitations (, ).
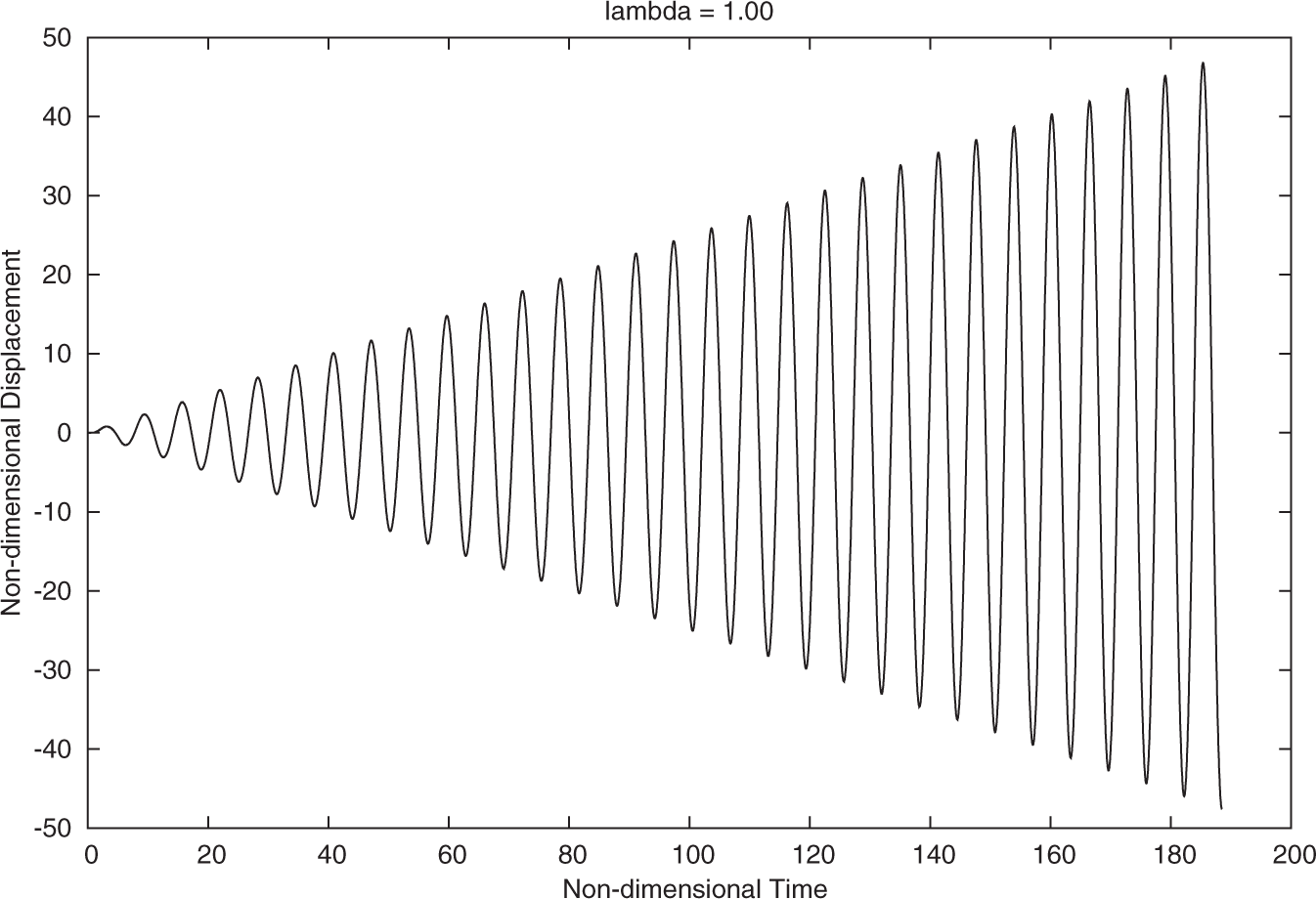
Resonant motion of a dry friction oscillator ().
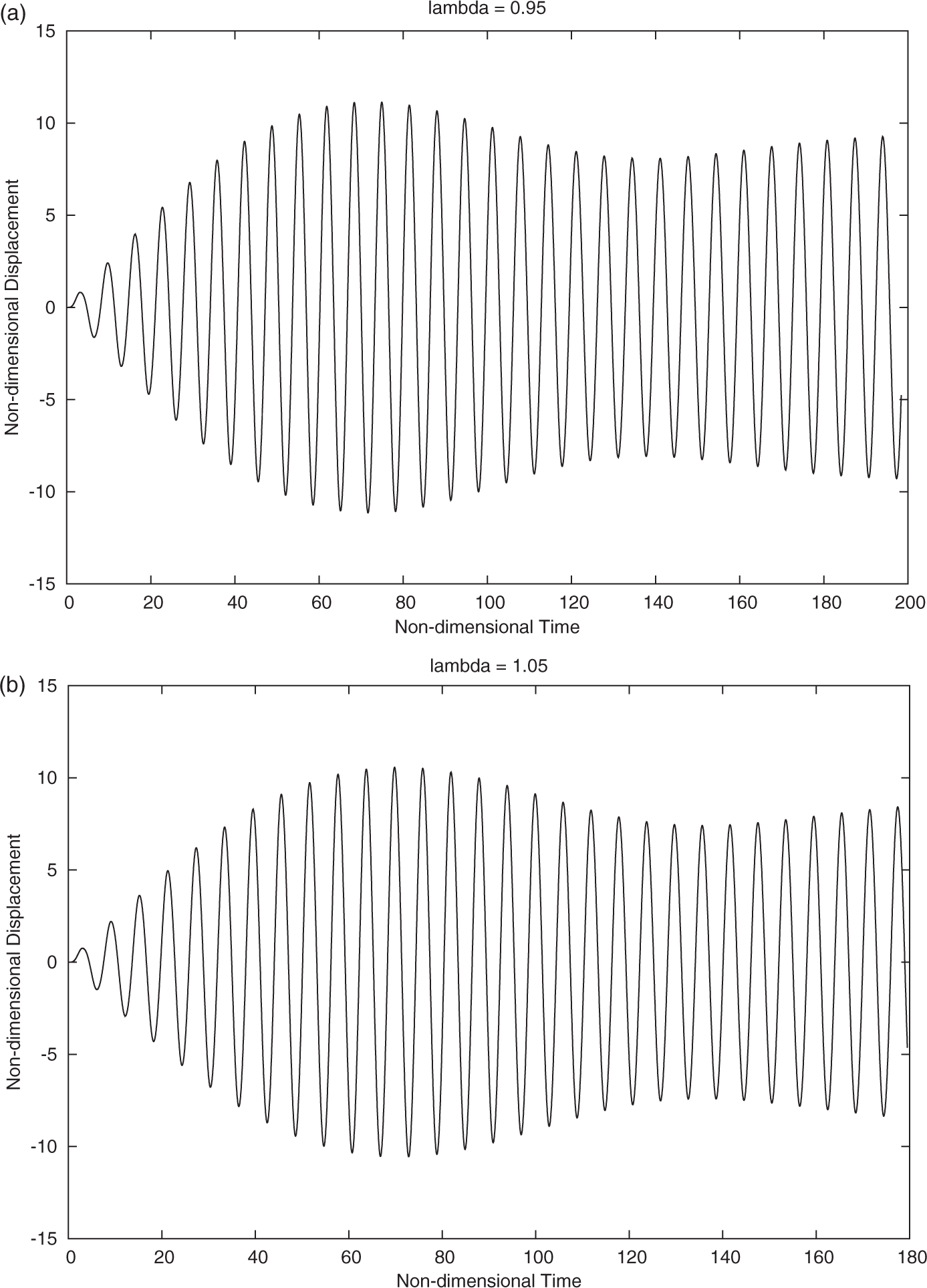
Unlike viscous damping, presence of dry friction alone cannot stop the ever-growing resonant motion when . This is evident from equations (29) and (30), and equations (33) and (35), the exact analytical solution given by Licskó and Csernák (2013), and also the approximate analytical solution of Inman (2008). The resonant motion, obtained using the proposed method in Figure 5, shows clearly the ever-growing amplitudes with time. When the excitation frequency shifts slightly away from the resonance, a steady sate motion containing one faster frequency and one slower frequency is reached after a few excitation cycles of time. This well-known beating phenomenon is clearly demonstrated in Figure 6 for frequency ratios: and .
Near-resonant motions of a dry friction oscillator and beating phenomena ().
To explore the effects of excitation frequencies and frictional coefficients, the percentages of stiction times for steady state motions were computed for a range of frequency ratios and ten different coefficients of friction (). Other parameters are . The results are plotted in Figure 7. Each percentage time is calculated using the stiction time during the 30th vibration cycle and the excitation period T. To improve the accuracy for the computed stiction times, a fine time step of is used. For coefficients of friction less than 0.6, the stiction time is negligibly small for high excitation frequencies. For coefficients of friction larger than 0.6, the stiction times vary considerably with the excitation frequencies. In the extreme scenario, , the stiction times are nearly 100%. For low excitation frequencies, the stiction times vary significantly with the excitation frequencies in a highly fluctuating manner.
Variations of percentage stiction times of steady state motions with excitation frequencies for different coefficients of friction.
1.2. Chaotic motion and bifurcations
For an SDOF dry friction oscillator subjected to a harmonic excitation, shown in Figure 1, there are five parameters, frequency ratio, λ, phase angle, , ratio of the normal force to the magnitude of excitation σ, the static coefficient of friction, , and ratio of the kinetic coefficient of friction (COF) to the static COF, χ, and two non-dimensional initial state variables z0 and , which influence the system response. If the system behaviour is periodic, the steady state responses are insensitive to initial conditions. If the system Behaviour is chaotic, the long term system responses are very sensitive to the initial conditions. For the dry friction oscillator, the driving parameter appears to be χ. For this reason, we choose to fix four parameters , , and , , and vary χ in a practical range of . In this study, the initial conditions are chosen from the following rectangular domain: and . For each value of χ, the responses of the dry friction oscillator to the harmonic excitation and 1681 sets of arbitrary combinations of initial conditions is obtained using the proposed method with a time step of , here T is the period of excitation. Each of the 1681 mean amplitudes and asymmetry parameters is determined using equation (38) after the response has elapsed 30 excitation cycles of time. A total of 268,960 covering 1681 sets of initial conditions and 80 distinct ratios of kinetic to static COF in the range of are plotted in Figure 8 and Figure 9. It can be seen that, for , the mean amplitudes are unique and independent of initial conditions; the asymmetric parameters are zero and also independent of initial conditions. The responses of the system are periodic and symmetric with respect to or the undeformed state of the spring. A bifurcation appears at . The responses are no longer symmetric with respect to . The system behaviour is asymmetric but periodic. For , the system motion is sensitive to the initial conditions with broad band amplitudes and broad band asymmetry parameters. The bandwidths for both the mean amplitudes and the asymmetric parameter increase with decreasing χ. The system motion is chaotic.
Mean amplitudes vs. ratio of kinetic to static COF.
Asymmetric parameter vs. ratio of kinetic to static COF.
Frequency response curve ().
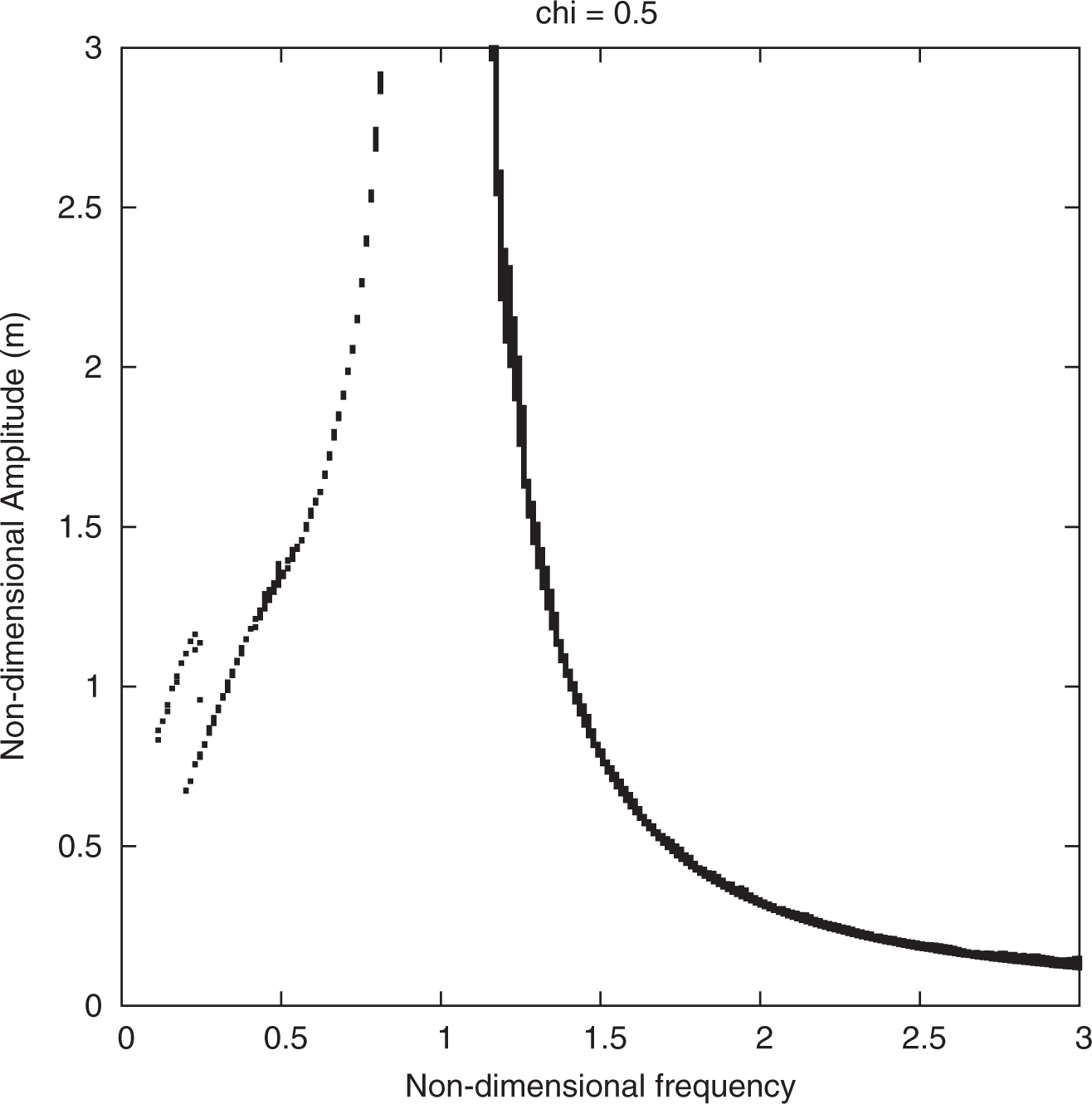
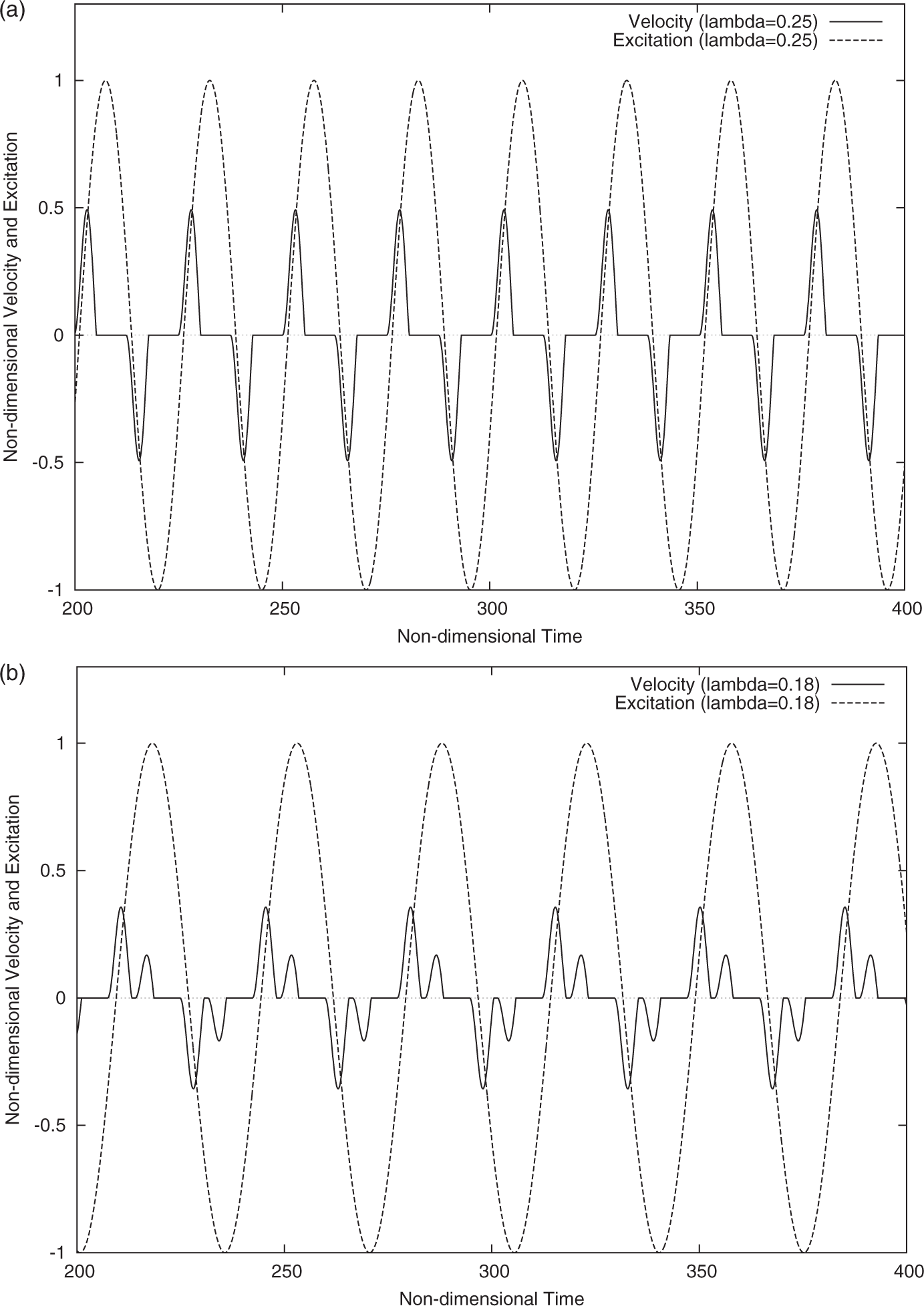
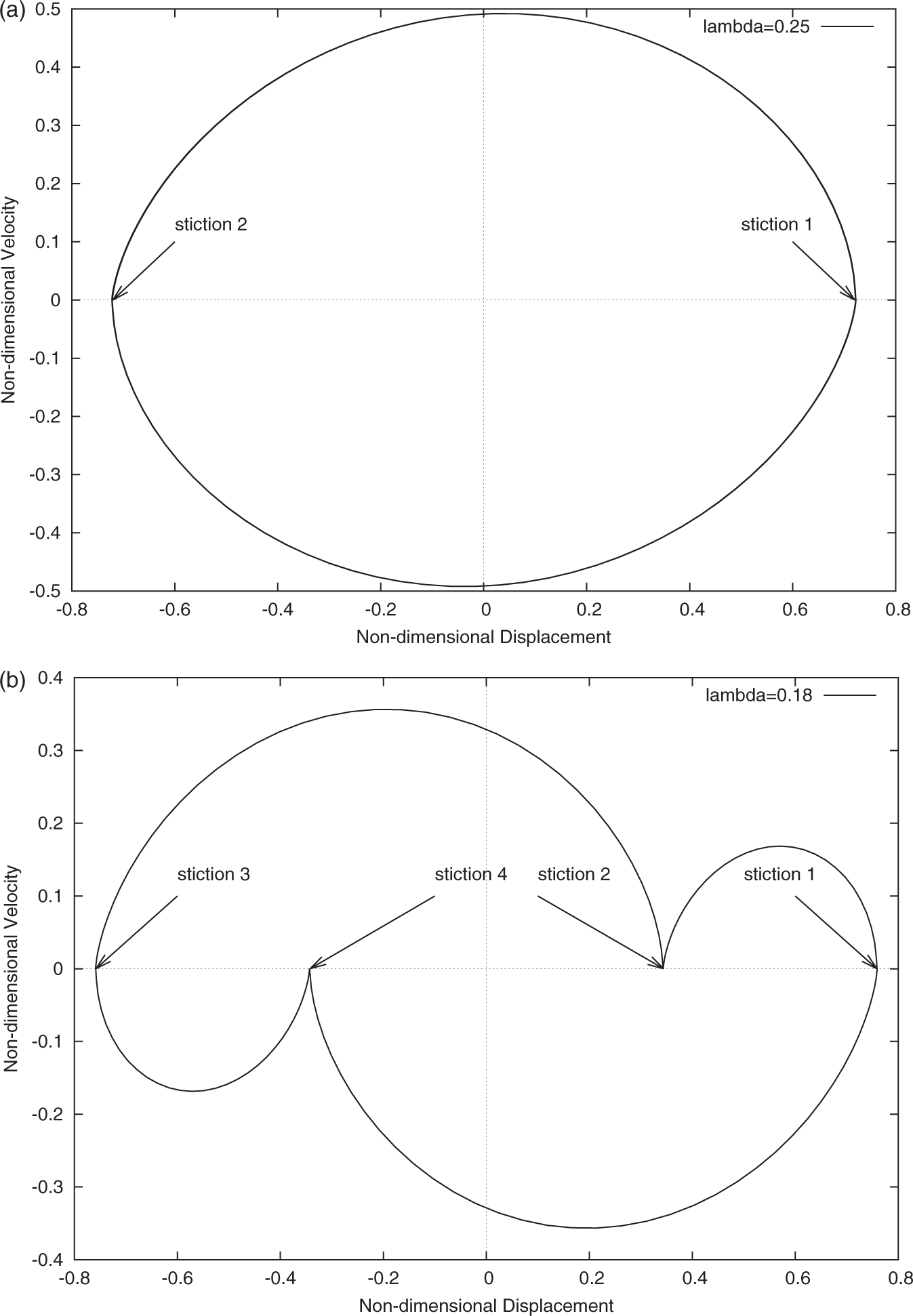
A review of results in Figure 8 and Figure 9 indicates that χ appears to be a driving parameter influencing the global Behaviour of the SDOF dry friction oscillator. For this reason, the mean amplitudes of long term responses of the SDOF dry friction oscillator under a harmonic excitation for and are obtained for , , and are obtained for . The results are plotted in Figure 10 and Figure 11, respectively. Each point in the two sets of frequency response curves contains 1681 data, which represents a total of 1681 solutions corresponding to different combinations of initial conditions in the rectangular domain of and . As expected, the system response is periodic for with one principal resonance at and an order-6 sub-harmonic resonance at . To clearly demonstrate the order-6 sub-harmonic resonance, the steady state velocities of the mass after 15 excitation cycles of motion from rest at the origin are shown in Figure 12 for two excitation frequencies, one within the sub-harmonic resonant zone at , and the other above the sub-harmonic resonant zone at . For reference, the non-dimensional excitation is also plotted in the two figures. It can be seen that the period-1 motion Figure 12(a) for involves the forward slip, stiction with a tendency to slide backward, backward slip and stiction with a tendency to slide forward in an excitation cycle. The steady state motion with two stiction durations is shown clearly in Figure 13(a). The motion generated at the period doubling bifurcation in Figure 12(b) for is a bit more complex. In an excitation cycle, it involves the forward slip, stiction with a tendency to slide forward, 2nd forward slip, stiction with a tendency to slide backward, 1st backward slip, stiction with a tendency to slide backward, 2nd backward slip, stiction with a tendency to slide forward, and finally the 3rd forward slip. Two additional stiction durations represented by the two cusps in the corresponding phase diagram in Figure 13(b) are developed during each of the forward and backward sliding motions.
Frequency response curve ().
System responses for excitation frequencies near and slightly away from the super-harmonic resonant frequency ().
Phase diagrams of steady state system responses for excitation frequencies near and slightly away from the super-harmonic resonant frequency ().
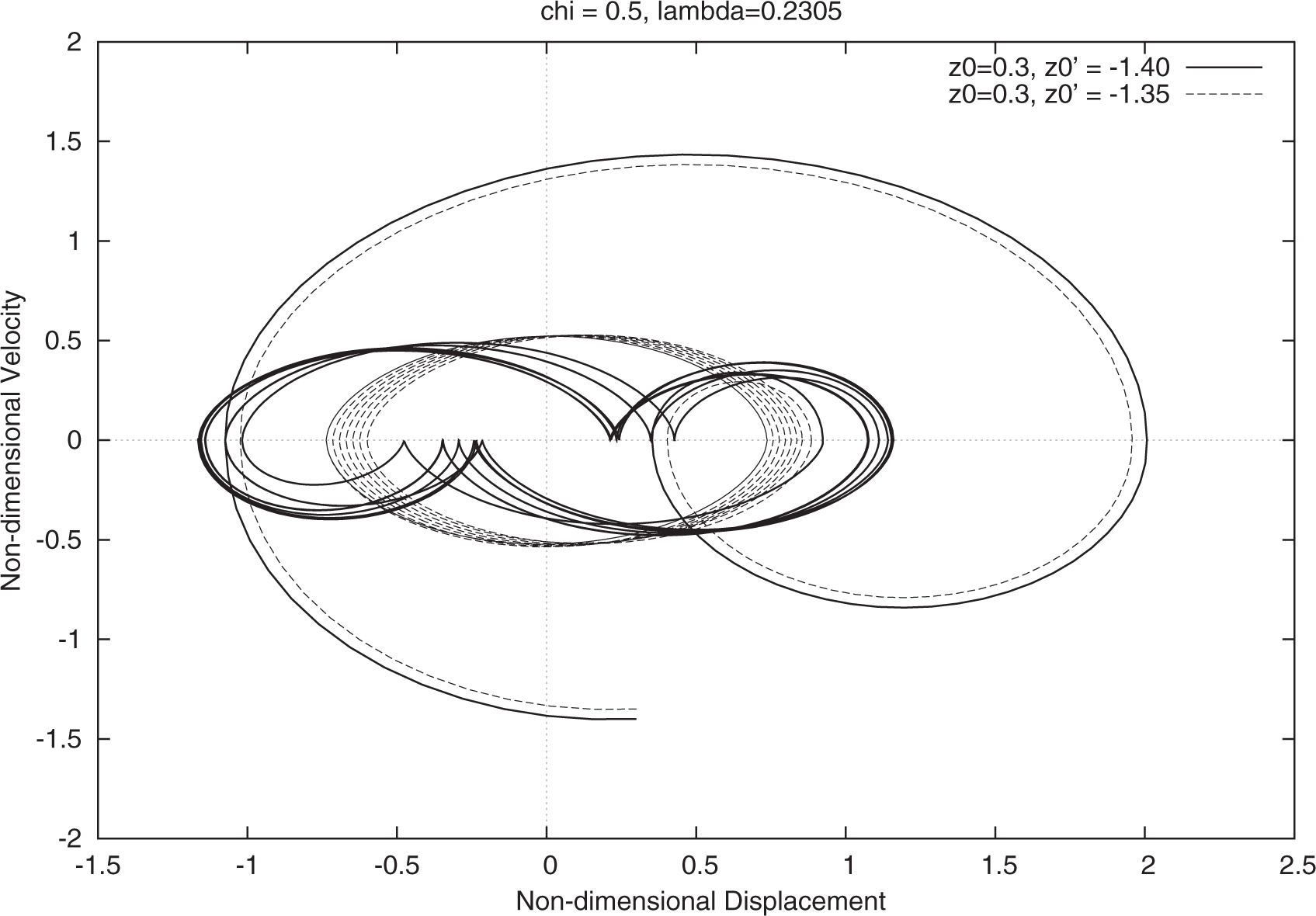
For , the steady state response is always a period-doubling motion for excitation frequencies during the sub-harmonic resonant region, regardless of the initial conditions. However, for , both period-1 and period-doubling motion can occur for excitation frequencies in the sub-harmonic resonant region. The switch from one to the other is very sensitive to the initial conditions in a rather chaotic manner. The long term non-dimensional velocities for and in Figure 14 show how two initially very close responses diverge into different types of motion after the first stiction.
Sensitivities of system behaviour to initial conditions ().
In the case that the kinetic and static coefficients of friction between the block and its support are equal, the transitions from stiction to slip, or from slip to stiction, occur smoothly without variations of the friction force. In cases that the kinetic and static coefficients of friction are different, the transitions from stiction to slip, or from slip to stiction, are accompanied by discontinuous variations of the friction force according to Coulomb's law of friction, which was used in this paper. If the block is at the state of stiction, slip occurs when the friction force reaches its maximum value . Any non-zero velocity characterizing the state of slip brings about a rapid reduction in the friction force from to for . However, for , slip will not occur until the friction force further increases by an additional amount of . This results in a prolonged stiction duration and tends to suppress the occurrence of chaotic behaviour.
2. Conclusions
Behaviour of a dry friction oscillator is studied numerically for a wide range of parameters. Dry friction characterized with kinetic coefficient that is different from the static coefficient of friction is the source of nonlinearity and the driving factor for chaotic motion. For ratios of kinetic COF to static COF greater than unity, the motion of SDOF friction oscillators is periodic. However, as this ratio decreases below unity, which is quite common in engineering applications, sub-harmonic resonances leading to periodic motion with broad band amplitudes can occur. The procedure proposed in this paper for solving the non-smooth frictional problem is accurate, efficient and reliable. Moreover, the numerical procedure can be extended to multibody dry friction oscillators.
Footnotes
Acknowledgments
The author(s) are grateful to the anonymous reviewers for their candid and constructive criticism, who have helped to improve the quality of the paper.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (grant number 51075051); and the National Science and Technology Major Project of China (grant number 2012ZX04010-011).
References
1.
BatakoADLLalorMJPiiroinenPT (2007) Numerical Bifurcation Analysis of a Friction-driven Vibro-impact System. Journal of Sound and Vibration308: 392–404.
2.
CasiniPVestroniF (2004) Non-standard bifurcations in systems with multiple discontinuity boundaries. Nonlinear Dynamics35: 41–59.
3.
CasiniPGianniniOVestroniF (2006) Experimental evidence of non-standard bifurcations in non-smooth oscillator dynamics. Nonlinear Dynamics46: 259–272.
4.
ChengGZuJW (2002) Two-Frequency Oscillation With Combined Coulomb and Viscous Frictions. Journal of Vibration and Acoustics124: 537.
5.
FerriAAWhitemanWE (2007) Free Response of a System with Negative Viscous Damping and Displacement-dependent Dry Friction Damping. Journal of Sound and Vibration306: 400–418.
6.
GalvanettoU (1997) Bifurcations and Chaos in a Four-Dimensional Mechanical System with Dry Friction. Journal of Sound and Vibration4: 690–695.
7.
GalvanettoU (2001) Some Discontinuous Bifurcations in a Two-block Stick–Slip System. Journal of Sound and Vibration248: 653–669.
8.
HongHKLiuCS (2000) Coulomb Friction Oscillator: Modelling and Responses to Harmonic Loads and Base Excitations. Journal of Sound and Vibration229: 1171–1192.
LiangJ (2005) Identifying Coulomb and Viscous Damping from Free-vibration Acceleration Decrements. Journal of Sound and Vibration282: 1208–1220.
11.
Licskó G and Csernák G (2013) On the chaotic behaviour of a simple dry-friction oscillator. Mathematics and Computers in Simulation 95: 55–62.
12.
LuoACJGeggBC (2006a) Stick and Non-stick Periodic Motions in Periodically Forced Oscillators with Dry Friction. Journal of Sound and Vibration291: 132–168.
13.
LuoACJGeggBC (2006b) On the Mechanism of Stick and Nonstick, Periodic Motions in a Periodically Forced, Linear Oscillator With Dry Friction. Journal of Vibration and Acoustics128: 97.
14.
NacivetSPierreCThouverezF (2003) A Dynamic Lagrangian Frequency–time Method for the Vibration of Dry-friction-damped Systems. Journal of Sound and Vibration265: 201–219.
15.
NatsiavasS (1998) Stability of Piecewise Linear Oscillators with Viscous and Dry Friction Damping. Journal of Sound and Vibration217: 507–522.
16.
OanceaVGLaursenTA (1998) Investigations of Low Frequency Stick-Slip Motion: Experiments and Numerical Modelling. Journal of Sound and Vibration213: 577–600.
17.
OssowskiA (1999) Asymptotic Behaviour of an Oscillator Excited by Dry Friction Forces. Journal of Sound and Vibration222: 521–530.
18.
SaviMADivenyiSFrancaLFP (2007) Numerical and Experimental Investigations of the Nonlinear Dynamics and Chaos in Non-smooth Systems. Journal of Sound and Vibration301: 59–73.
19.
SteinGJZahoranskýRMúčkaP (2008) On Dry Friction Modelling and Simulation in Kinematically Excited Oscillatory Systems. Journal of Sound and Vibration311: 74–96.
20.
YuSDWenBC (2013) Vibration Analysis of Multiple Degrees of Freedom Mechanical System with Dry Friction. SAGE/Journal of Mechanical Engineering Science227: 1505–1514.