
Abstract
In this paper, an H∞ controller with actuator saturation consideration is proposed to attenuate the vibration of periodic piecewise vibration systems. Based on a continuous Lyapunov function with a time-varying Lyapunov matrix, the H∞ performance index of periodic piecewise vibration systems is studied first. On the basis of the obtained H∞ criterion, the conditions of designing a state-feedback active vibration controller are proposed in matrix inequality form with actuator saturation taken into account. Because of the nonconvexity of the conditions, a corresponding algorithm to compute the controller gain is developed as well. A representative numerical example is used to verify the effectiveness of the proposed method.
1. Introduction
In engineering applications, some vibration systems exhibit periodic dynamic characteristics such as rotor-blade systems, such that under a constant rotational speed, the variation of the blade position will lead to periodical variations of inertial distribution. A periodic time-varying system is always used to model such vibration systems. A periodic piecewise system is a special kind of periodic time-varying system, with the property that during a period, the system retains time-invariant in each subinterval. This kind of periodic system may also be obtained as the approximated models of periodic time-varying systems by dividing the system into several intervals during a period, and in each interval, the system is approximated with a constant system with techniques such as the average method (Farhang and Midha, 1995; Selstad and Farhang, 1996). On the other hand, we can find prototypes of periodic piecewise systems in practice, such as conveying machines with periodic-varying loads or manufacturing machines which manipulate repetitive tasks.
Vibration control for periodic systems has attracted extensive attention in recent years. As a special kind of time-varying system, the techniques for general time-varying systems can be adopted to deal with the control problems of periodic time-varying systems. An active vibration control strategy combining online modeling or identification and controller updating as an effective and easy application method has been commonly employed in engineering applications. This technique always calls for a fast online modeling process to obtain the system dynamics and update the controller. The filtered-x least mean squares method has been broadly adopted to control the time-varying systems (Huang et al., 2012; Zhang et al., 2012) because of its merits of low computation burden and easy implementation. However, since the two processes, that is, system modeling and controller updating, are coupled, it may result in accumulated errors, amplified vibration and destabilized systems (Kim and Swanson, 2005). Moreover, the convergence of the two processes may not be synchronous; it is hard to tell whether the controller is optimal after both of them converge (Wang and Mak, 2014). A control strategy including adaptive identification combining with nonadaptive control was proposed in Wang and Mak (2014), which decouples the two processes, and the optimal controller can be guaranteed when the identification process converges. However, this kind of active vibration control calls for fast online processing, which leads to a high cost. An alternative approach for controlling periodic systems is based on the well-known Floquet theory. By implementing the Lyapunov–Floquet transformation, Floquet theory was used in the control of periodic systems in Sinha and Joseph (1994), and this method has been broadly adopted in engineering (Deshmukh et al., 1999; Sinha et al., 2000). However, the closed-loop system asymptotic stability cannot be guaranteed because of a generalized inverse of a rectangular matrix present in the control law. To solve this problem, a procedure consisting of the Lyapunov–Floquet transformation, the backstepping technique and Floquet theory was proposed in Deshmuhk and Sinha (2004). The optimal control with solution of a periodic Riccati equation is used in helicopter vibration control (Arcara et al., 2000) and for periodic delayed systems, optimal controls separately based on Floquet theory, Chebyshev spectral collocation and the Lyapunov–Floquet transformation were studied in Nazari et al. (2014).
Another focus in vibration control in practice is controller saturation, which has been broadly investigated over the past decades. Because of the unmeasured disturbance and practical actuator power limitation, it can be expected that the desired force may exceed the capacity of the practical actuator, which leads to actuator saturation. Saturation often has negative effects on the system performance and may result in system instability. Many works have been devoted to solving this problem. A method which guarantees performance with large control gains was developed by Nguyen and Jabbari (1999, 2000). This method has been successfully applied for linear parameter varying (LPV) systems and civil engineering structures with controller saturation (Du and Lam, 2006; Jabbri, 2001).
In this paper, we study the vibration control of periodic piecewise vibration systems with techniques borrowed from switched system theory. The L2-gain performance of switched systems based on average dwell time was studied in Zhai et al. (2001), and with the average dwell time approach, asynchronous H∞ control of discrete-time switched systems was studied in Zhang and Shi (2009). By relaxing the average dwell time constraint, mode-dependent average dwell time is adopted to formulate a weighted H∞ performance for switched systems. Periodic piecewise systems can be treated as a special case of switched systems, with fixed periodic switching law and subsystem dwell time. For periodic piecewise systems with possibly non-Hurwitz susbsystems, the L2-gain performance based on the Lyapunov function with a continuous and discontinuous time-varying Lyapunov matrix were studied in Li et al. (2015a,b), In this paper, a continuous Lyapunov function with a time-varying Lyapunov matrix is adopted here to study the H∞ performance of periodic piecewise systems, and an H∞ performance controller considering actuator saturation is proposed to attenuate the system vibration. Due to the nonconvexity of the conditions, an iterative algorithm is also developed to find possible solutions of controller gains. It is worth mentioning that the performance index developed in this paper is different from those in Li et al. (2015a,b), since all subsystems are stable in this study and this leads to a new characterization. Moreover, the H∞ controller design problem under input saturation is also tackled here. These are the main contributions of the present work. The paper is organized as follows. The problems are formulated in Section 2. The H∞ performance for a periodic piecewise vibration system is studied in Section 3, and an H∞ controller under actuator saturation and the corresponding algorithm are developed in Section 4. Section 5 provides an illustrative example to validate the merit of the approach proposed in this paper. The paper is concluded in Section 6.
2. Vibration model description
A simplified lumped parameters vibration model is shown in Figure 1. It is assumed that this vibration system composes masses m1, m2, … , m
k
, dampers c1, c2, … , c
k
and springs k1, k2, … , k
k
. The depicted system is excited by a disturbance vector A lumped parameter vibration system model.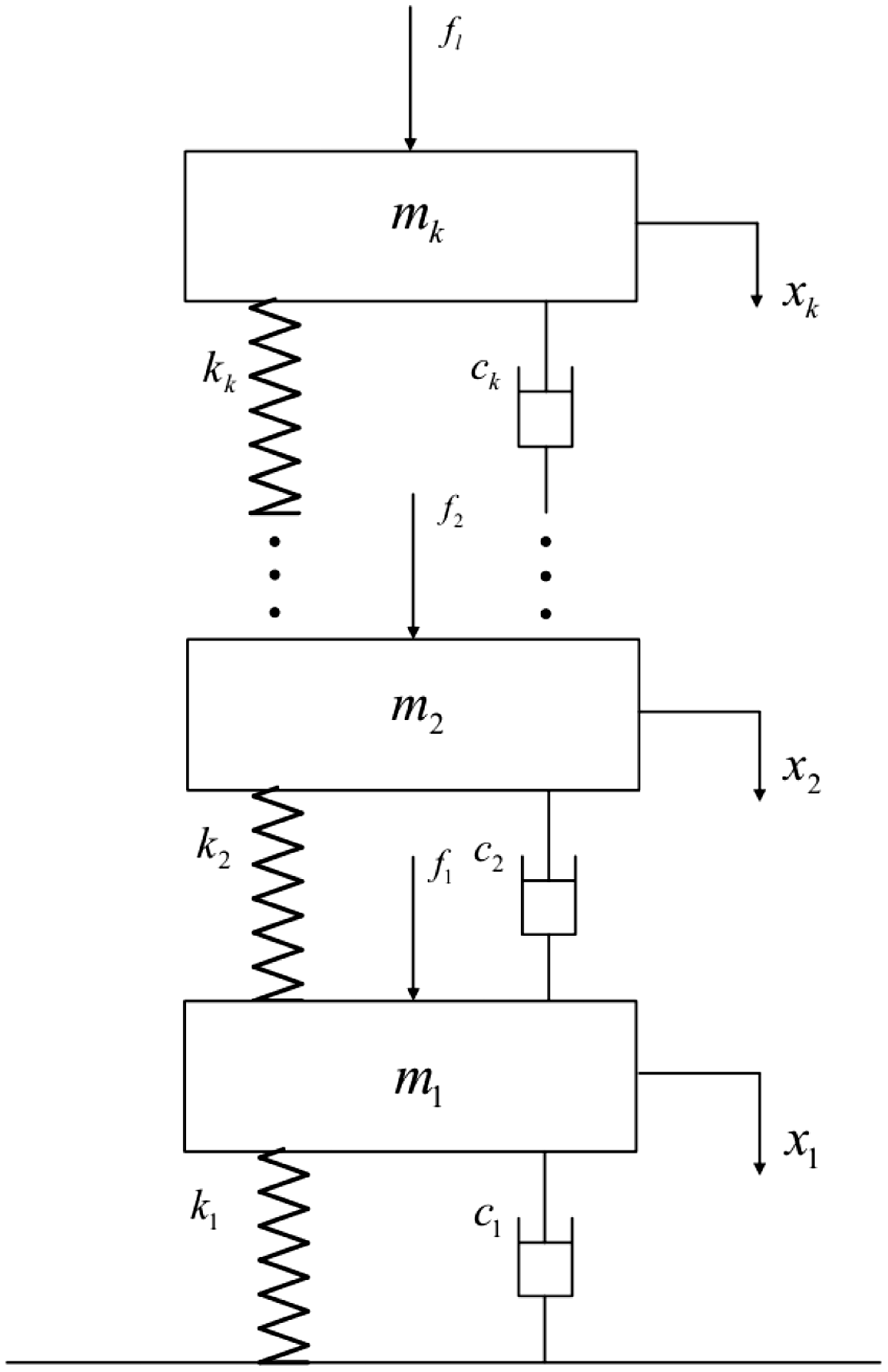


If we choose a state vector

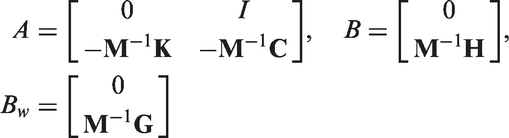
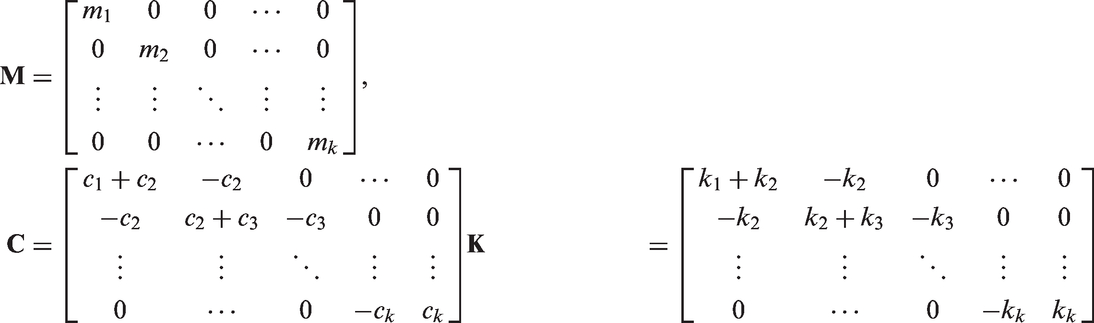
In the following paragraph, the description and analysis are based on the vibration system model in state-space form (4). Suppose that the system parameter has S subsets over a fundamental period. In this way, the interval [0,T
p
) can be partitioned into S subintervals [ti−1, t
i
), i ∈ N, N = {1, 2, … , S}, where t0 = 0, t
S
= T
p
. In the ith subinterval, the system elements are constant, system matrices can be represented by (A
i
, B
i
, B
wi
, C
i
, D
i
, D
wi
) and the dwell time is T
i
= t
i
− ti−1 with

To facilitate subsequent development, we give a definition concerning the exponential stability of system (4).
Definition 1
The periodic piecewise vibration system (4) with u(t) = 0, w(t) = 0 is said to be exponentially stable such that the state of the system satisfies
3. H∞ performance of periodic piecewise vibration system
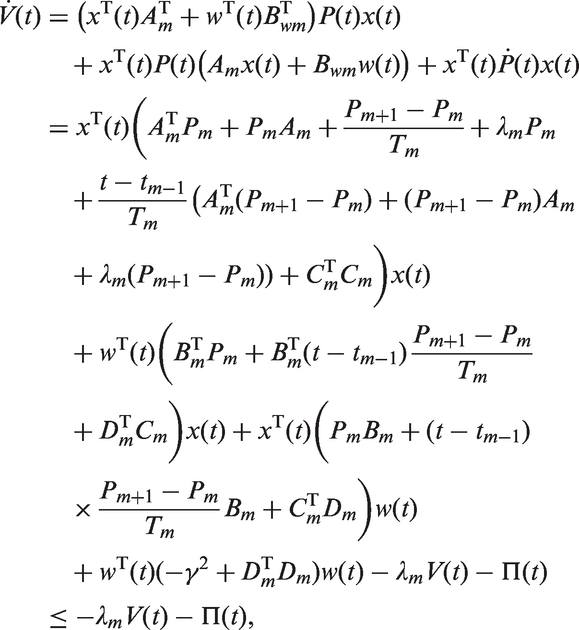
In this section, based on a continuous time-varying Lyapunov function, the H∞ performance of the periodic piecewise vibration system is studied.
Consider a Lyapunov function given by




Generally speaking, practical vibration systems with only passive elements are inherently stable. In this way, we assume that for a periodic piecewise vibration system (4), there exist λ
i
> 0, i = 1, 2, … , S, such that
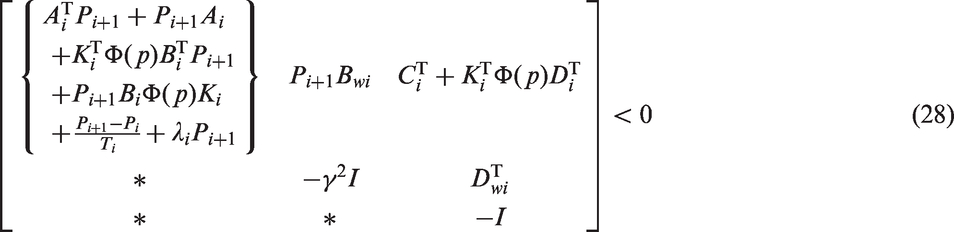
Theorem 1
Consider periodic piecewise vibration system (4) with u = 0, given λ
i
> 0, i = 1, 2, … , S and let λmax = max λ
i
, λmin = min λ
i
. If there exist P
i
> 0 for i = 0, 1, … , S such that




Proof
The exponential stability of system (4) can be guaranteed from Li et al. (2015a). Assume t ∈ [αT + tm−1, αT + t
m
), α = 1, 2, … , m = 1, … , S + 1. From (11) and (12), we have
Inequality (16) is equivalent to
Integrating (18) from t = 0 to ∞, we have

4. H∞ Controller synthesis
In this section, our objective is to design a state-feedback controller such that the closed-loop vibration system is exponentially stable and has an H∞ disturbance attenuation performance. First, controller saturation will be studied independently. Then, an H∞ controller with saturation consideration will be proposed for periodic piecewise vibration systems.
4.1. Controller saturation
Controller saturation is always encountered in practice. When considering saturation, periodic piecewise vibration system (4) can be rewritten as






Theorem 2
Consider periodic piecewise vibration system (19). If there exist β > 0, matrix Q > 0 and state-feedback controller u(t) = K
i
q(t), i = 1, 2, … , S such that the following matrix inequalities are feasible


Proof
The proof is similar to the one in Nguyen and Jabbari (1999). Notice that, for the periodic piecewise vibration system (19) with zero initial conditions, according to (25), we have
Remark 1
It should be mentioned that a common Lyapunov function V(t) = qT(t)Qq(t) is employed to develop the conditions, which easily guarantees an invariant ellipsoid for the state in all subsystems. On the other hand, only the vertices of Θvex need to be checked due to the affine dependence of the matrix inequalities.
Remark 2
To deal with controller saturation, the above technique requires each actuator limit being available and the estimation of the disturbance peak value being known in advance, which can be obtained easily in practice.
4.2. Controller synthesis with actuator saturation
Our purpose here is to find a controller with saturation considered such that for any peak-bounded disturbance w, the energy of the output z satisfies (14). The system block with controller saturation is depicted in Figure 2. The existence conditions for a set of H∞ controllers with saturation can be given as follows.
Schematic of a closed-loop system with controller saturation.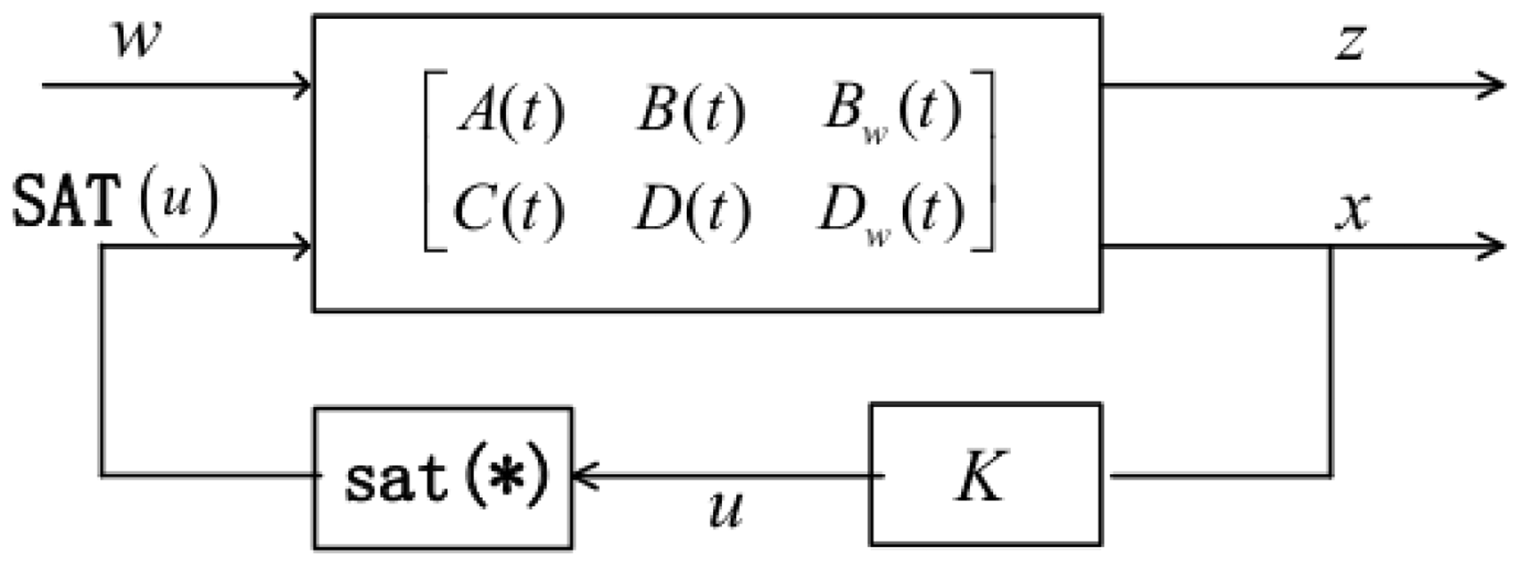
Theorem 3
Consider periodic piecewise vibration system (19), if there exist a set of λ
i
> 0, i = 1, 2, … , S, γ, β > 0, matrices Q > 0, P
i
> 0, i = 1, 2, … , S, and state feedback controller u(t) = K
i
x(t), i = 1, 2, … , S such that





The proof can be obtained easily by combining Theorem 1 and Theorem 2.
Remark 3
It should be noticed that different Lyapunov functions are used in the H∞ performance requirement and controller saturation demand. A Lyapunov function with a continuous time-varying Lyapunov matrix is adopted to derive the H∞ performance in order to achieve a less conservative result, while a quadratic Lyapunov function is employed to deal with the controller saturation, which can easily ensure an invariant ellipsoid for the system state. A Lyapunov function in the form of (8) can also be employed for controller saturation, but the derivation will become much more complicated, a quadratic Lyapunov function is more suitable to ensure the controller saturation performance. The coefficient
Notice that the condition in Theorem 3 is nonconvex with respect to the decision variables which cannot be solved directly. The following iteration algorithm is developed to obtain the controller gain.
Set ℓ = 1, select an initial set of For fixed For fixed If







Remark 4
K
i
, λ
i
, λmin, γ2 are set to be zero and λmax > 0 as the initial conditions for the H∞ disturbance attenuation performance, and a sufficiently small β > 0 is chosen in the beginning for controller saturation performance. This initial set of K
i
, λ
i
, λmax, λmin and β guarantees the algorithm can proceed. During the iteration, the parameter γ can be reduced since the K, λ, β obtained in Step 3 will be utilized as the initial value in Step 2 to derive a smaller γ, the convergence of γ in this algorithm is naturally guaranteed. Notice that σ1 can be chosen slightly less than one and σ2 is slightly greater than one, thus giving more freedom in computation of λ
i
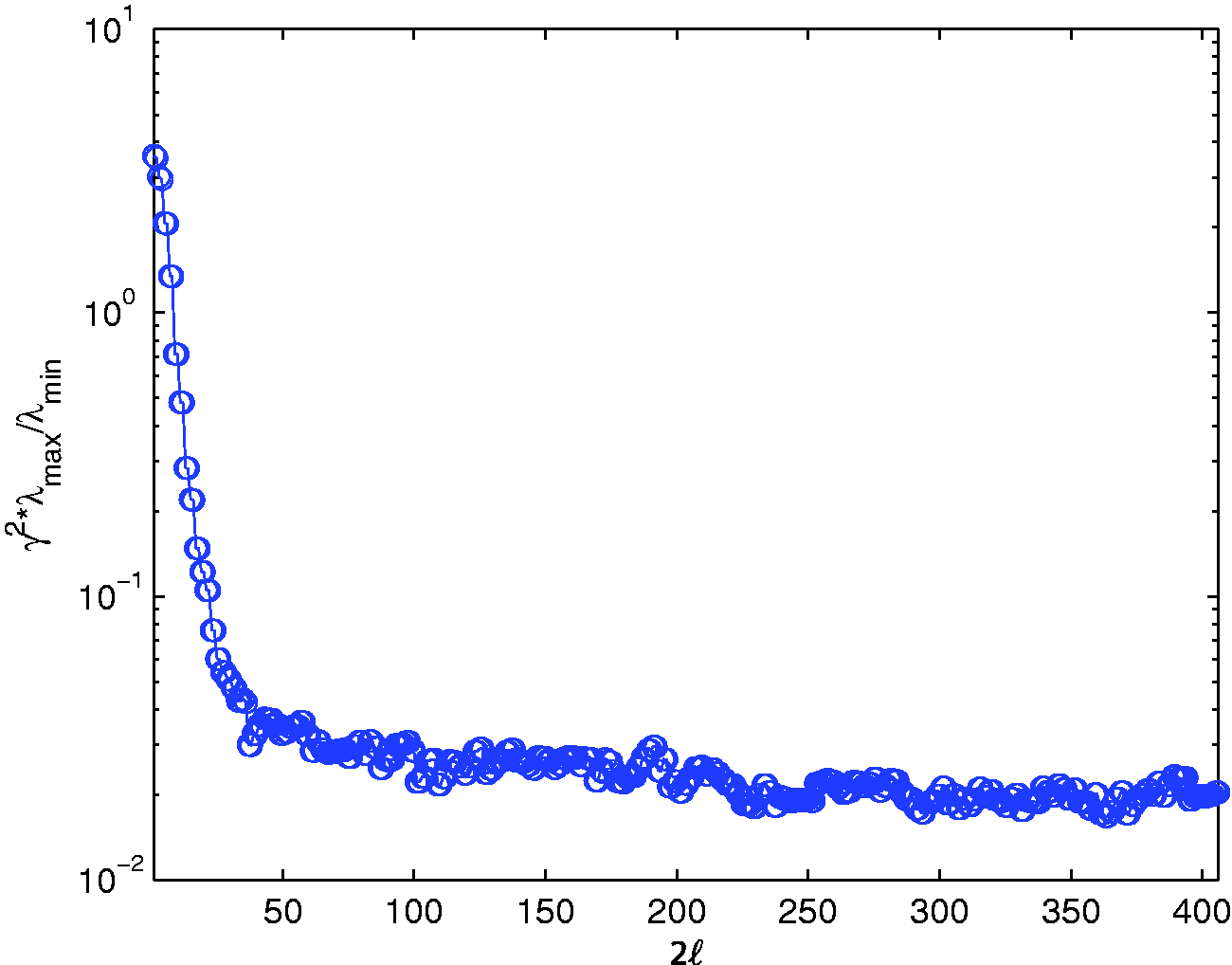
. At the same time, (38) bounds the ratio of λmax/λmin. Combining the convergence of γ and bounded ratio of λmax/λmin, the performance index
Remark 5
δ j > 1 is fixed in advance which is used to increase the controller gain. A greater δ j can maximize the utilization of the available control capability Nguyen and Jabbari (1999). However, a greater δ j will also increase the size of the polytope Θvex, which will deteriorate the H∞ performance. A suitable δ j needs to chosen through tuning to balance the trade-off between the H∞ performance and the controller gain.
5. Numerical example
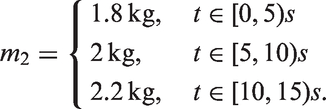
In this section, simulations are given to illustrate the merits of the proposed technique. A 2-degree-of-freedom (DOF) vibration system is shown in Figure 3, which includes masses m1, m2, springs k1, k2, dampers c1, c2 and one actuator which provides a force F
c
. A disturbance is applied on m2. Assume that m2 is periodic piecewise linear. This kind of periodic vibration system is an epitome of some manufacturing machines or conveying structures which have periodic loads. The model is not complicated, but it is representative since other complicated models can be developed from it. The system parameters are given as m1 = 4 kg, k1 = 100 N/m, c1 = 5 N s/m, k2 = 50 N/m and c2 = 5 N s/m (Filipovle and Schroder, 2001). Moreover, the system period is 15 s with t1 = 5 s, t2 = 10 s and t3 = 15 s, respectively, and assume the period of m2 variation is 15 s, and the value of m2 over a period is given as
A 2-DOF vibration system.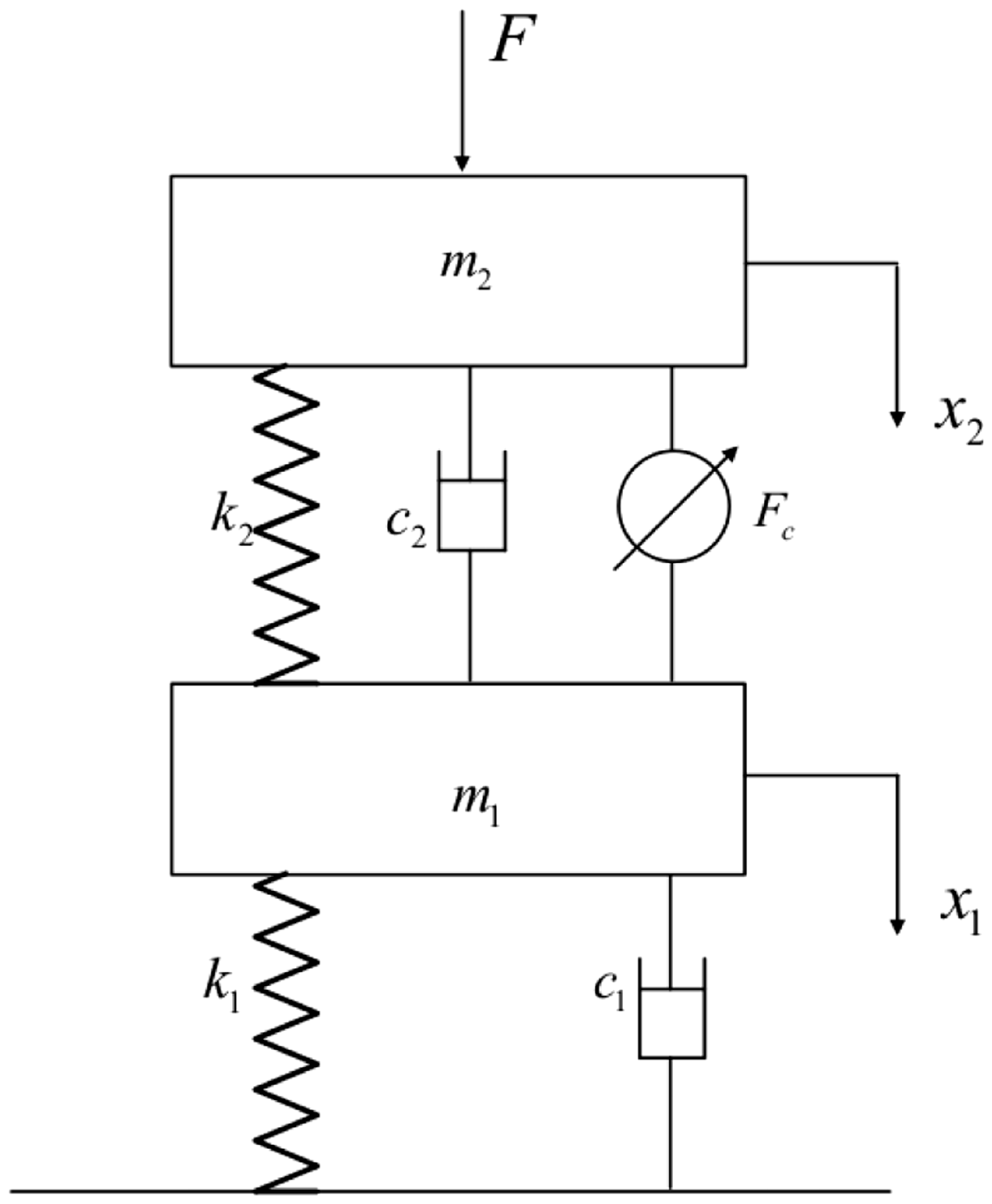
The system state-space form can be established according to (5) and the subsystem matrices can be given as
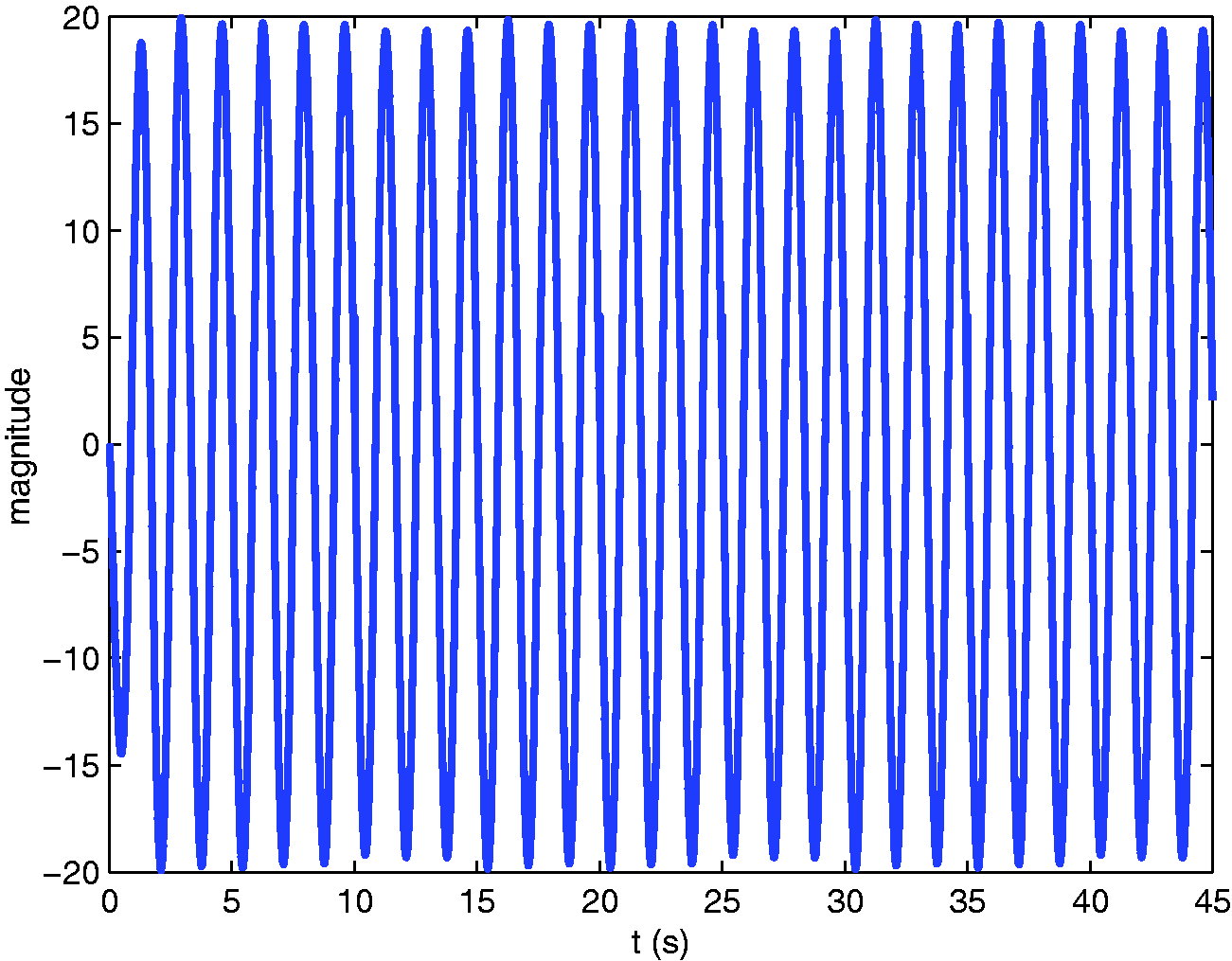
Given a sinusoidal disturbance as w = 10sin(1.2πt), t = [0,45), then wmax = 10. The disturbance frequency is chosen to be 0.6 Hz because the system vibrates heavily at this frequency. The control objective is attenuating the vibration at this frequency. First, we study the system response under control without considering actuator saturation, which is defined as Case I. The controller gain can be calculated according to Algorithm HC, only considering inequalities (33), (34) and (37). The controller gain is obtained as
Response comparison of open- and closed-loop systems in Case I. Actuator force in Case I.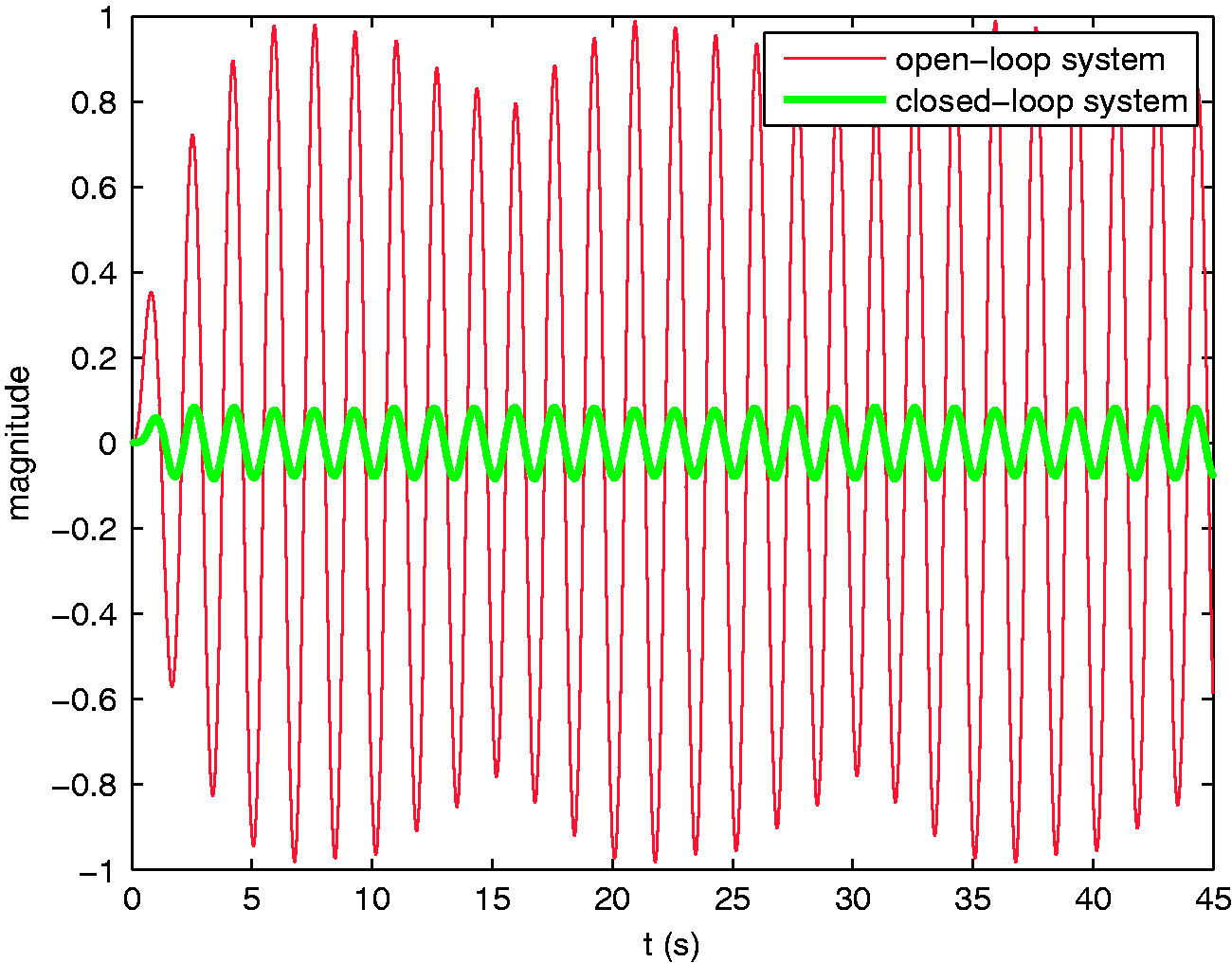

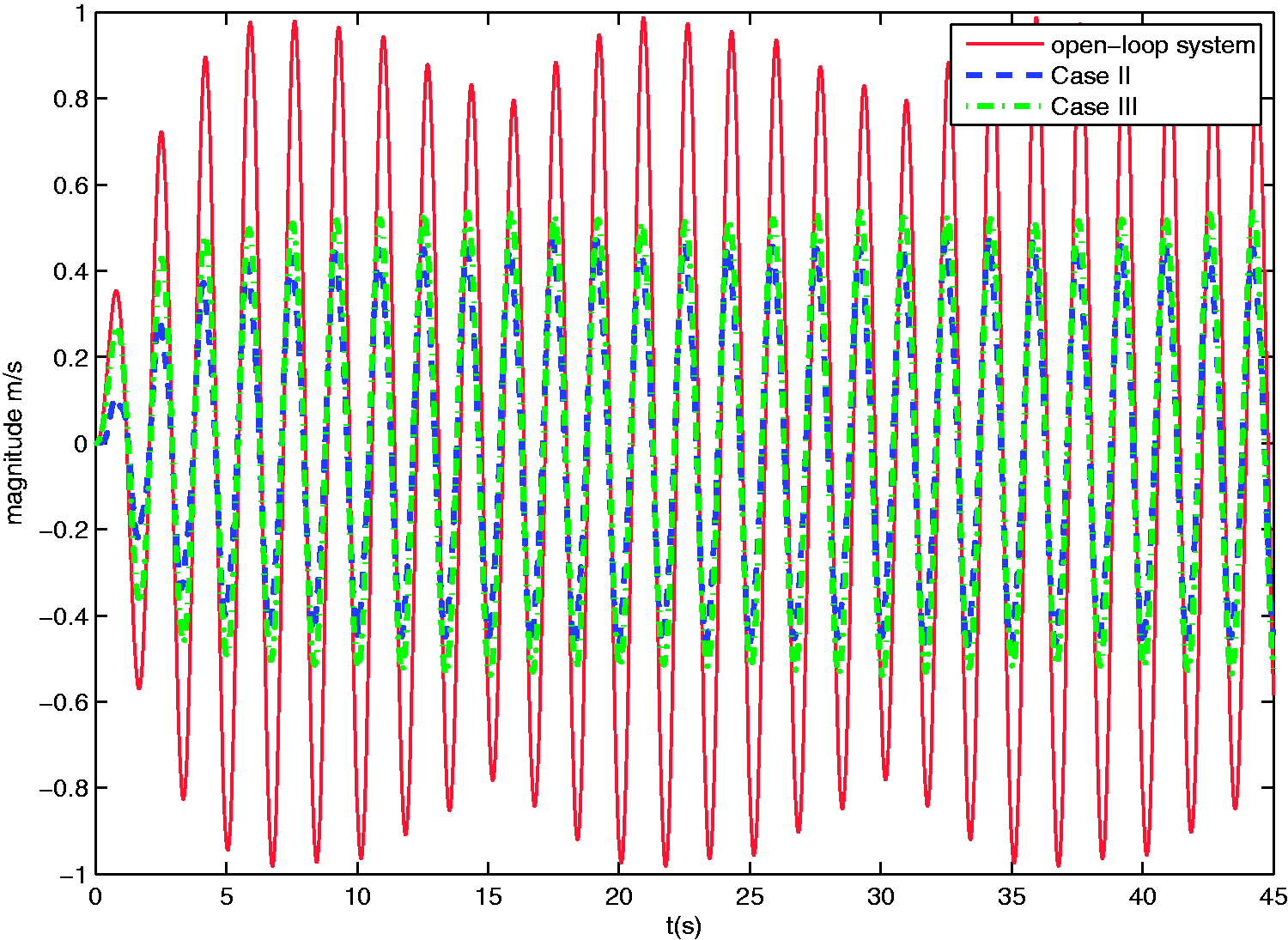
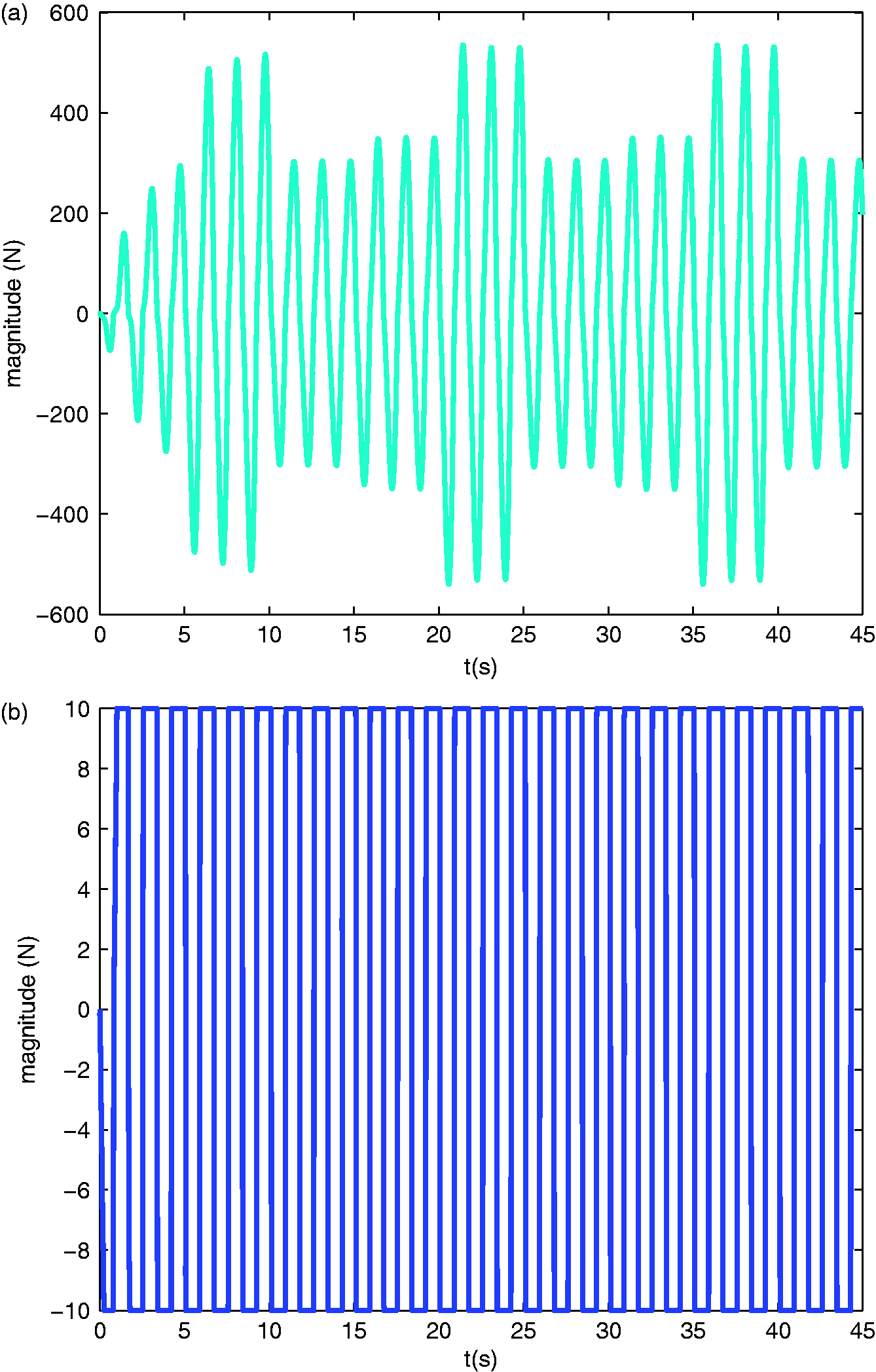
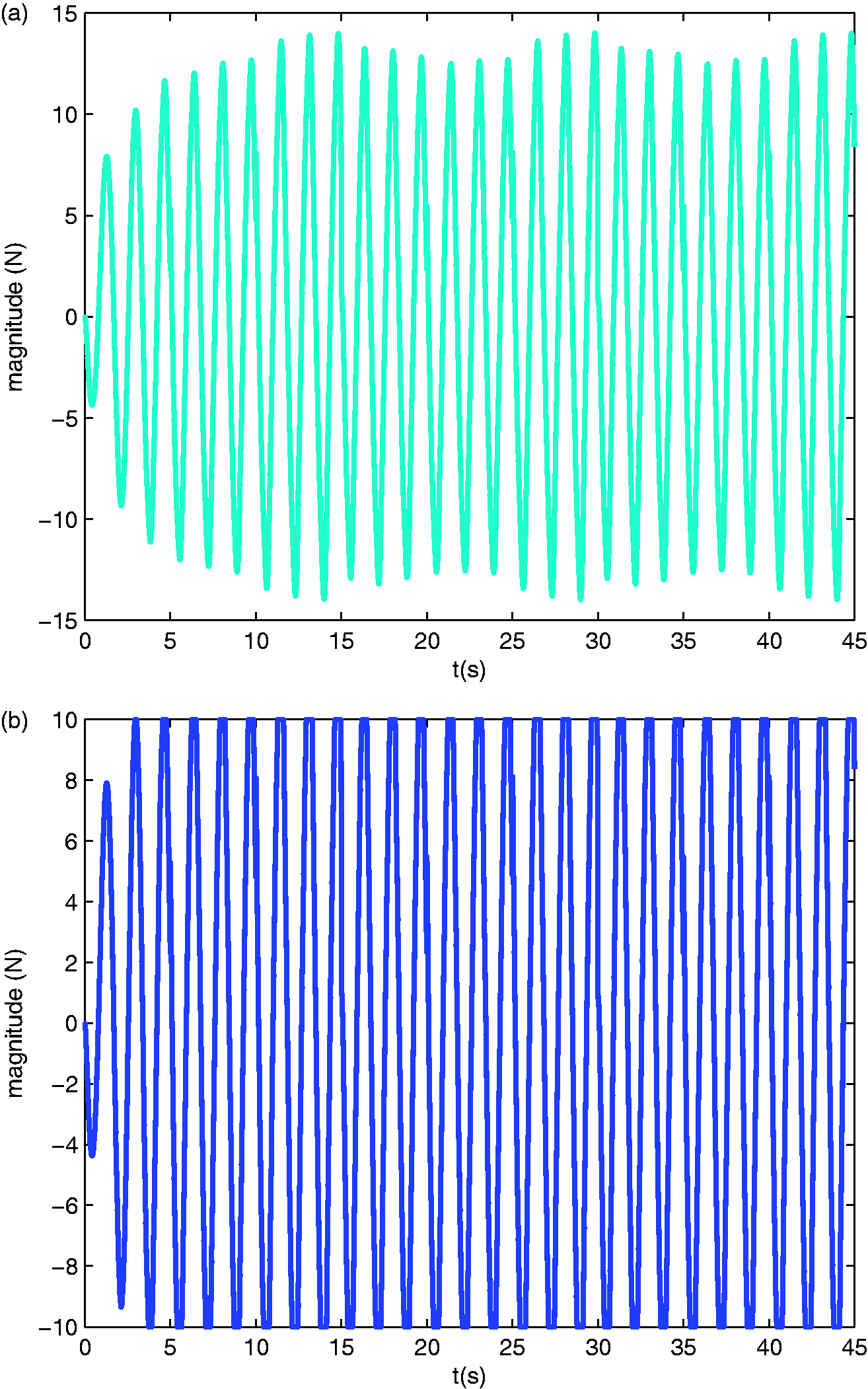
Then we discuss the condition that the actuator has saturation. Two cases are studied here, that is, Case II: controller designing without considering saturation, and Case III: controller designing with considering saturation. The actuator limit is 10 N, which is half of the control demand in Case I. The controller gain in Case II is the same as in Case I and the controller gain in Case III is computed according to Algorithm HC, which is obtained as
Evolution of γ. Evolution of Response of open- and closed-loop systems in Case II and Case III. Actuator force in Case II. (a) Control demand. (b) Controller output. Actuator force in Case III. (a) Control demand. (b) Control output.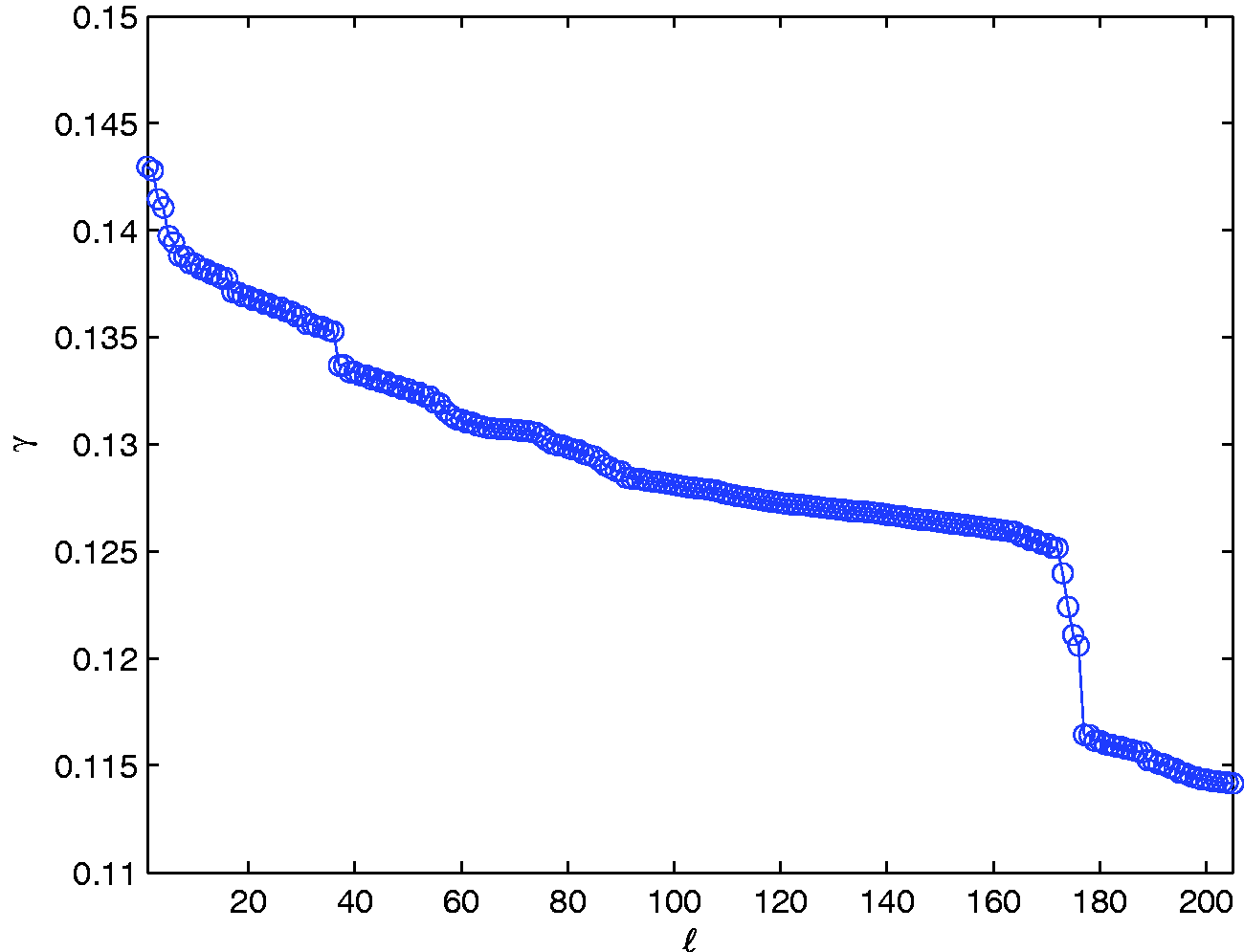
6. Conclusion
This paper has provided a controller design approach with H∞ disturbance attenuation performance and actuator saturation consideration for periodic piecewise vibration systems. The H∞ performance criterion has been studied for periodic piecewise vibration system first, and then a state-feedback controller with actuator saturation taken into account has been developed based on matrix inequalities. Since the conditions cannot be solved directly, an algorithm has been proposed to obtain the controller gain. Simulation results have demonstrated the controller based on the proposed method being effective in reducing the response of the representative vibration system.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was partially supported by GRF HKU 17205815 and HKU CRCG 201409176081.