
Abstract
In this work, the horizontal nonlinear response of a three-degree-of-freedom vertical transportation model excited by guide rail deformations is investigated. The equation of motion contains nonlinearities in the form of Duffing stiffness for the translational spring in tilting motion of the cabin. In order to improve the comfort for passengers a control strategy based on the State-dependent Ricatti Equation (SDRE) is proposed. Numerical simulations are performed to study the nonlinear behavior of the adopted mathematical model. In addition, we test the robustness of the SDRE control technique considering parametric errors and noise. The obtained results confirm that the proposed strategy can be effective in controlling the response of the system.
Keywords
1. Introduction
The exponential growth of urban centers has forced cities to develop themselves predominantly in the vertical direction. This development is achieved by means of advancement in the technology of construction of towers and very tall buildings. To supply the demand for these constructions, the development of high-speed elevators has become a necessity. As an example, in Taipei, Taiwan, the Taipei 101 building is 508 m tall and has two elevators working at speeds in excess of 60 km/h (Munakata et al., 2003). However, high speeds can result in decreased quality of ride (Mitsui and Nara, 1971), this being one of the main problems in high-speed elevators systems (Nai et al., 1994). Thus, it is necessary at the same time to increase the speed limit and improve the travel quality, without losing the efficiency of elevators. Although there is no speed limit that passengers can tolerate, there are limits on other parameters, such as levels of horizontal and vertical vibrations, lateral and longitudinal acceleration and jerk, all of which are necessary to ensure good ride quality for passengers (Fortune, 1997).
According to Roberts (1998), efficiency is related to how fast people move within buildings, the level of energy required to achieve these transitions and the volume used by the transportation system inside the building. In high-speed passenger elevators, the safety and comfort of the passengers is essential. Therefore, to provide a comfortable environment for passengers is a priority for skyscraper elevators. Three factors define passenger comfort: noise pollution/disturbance; atmospheric pressure inside the cabin; and vertical and horizontal vibrations levels, which, in addition to efficiency, guarantee good ride quality.
In the current literature, it is possible to find different models for elevator systems. Research on these systems generally focuses on vertical and horizontal vibration levels inside the cabin of the elevator, aiming at a better understanding of elevator dynamics and, therefore, improving the ride quality offered to passengers. Chi and Shu (1991) studied vertical vibrations of elevator systems under harmonic excitation. Zhu and Teppo (2003) built a scale model to simulate lateral linear vibrations in a traction cable, with varying length, used in high-speed elevators. Taking into account the length of hoisting cables and compensating ropes, the nonstationary dynamic behavior of an elevator system and cabin vibrations due to guide rail stochastic excitations, unevenness and imperfections were investigated (Kaczmarczyk and Iwankiewicz, 2006; Kaczmarczyk et al., 2009). Other works on elevator system dynamics and their components have been carried out by several authors (Fu et al., 2005; Zhang et al., 2008).
Lateral vibrations of the cabin during elevator operation are one of the most important factors that can affect the comfort of the passengers (Noguchi et al., 2011). Currently, with increasing building height and elevator speed, these vibrations reach large amplitudes due to excitations caused by misalignments and deformations of guide rails and air pressure disturbance around the cabin. To improve the comfort of the passengers, elevators should have a good control system, in order to increase the positioning accuracy and to guarantee that the speed of the elevator does not cause discomfort to the passengers, by decreasing the vertical and horizontal vibrations of the elevator cabin.
A number of works are found in the literature that attempt to suppress undesirable vibrations in elevator systems. Kaczmarczyk and Picton (2013) used a traction drive elevator system with long ropes and cables in order to analyze high-rise structures. A multi-modal active stiffness controller is proposed, which substantially reduced the response and the effects of passage through primary resonances. Benosman (2014) studied numerically the problem of elevator rope with sway motion due to external force disturbances through an active control, by using nonlinear controllers based on the Lyapunov theory, to stabilize the rope sway dynamics. In Sandilo and van Horssen (2015), a model for the transversal vibrations of an elevator cable system is studied. The initial-boundary value problem for a linear axially moving string equation with time varying length, space–time-varying tension and a constant velocity is studied. The upper end of the string is excited sinusoidally, whereas the lower end of the string is assumed to be fixed. An active suspension system with electromagnetic actuators was used to suppress vibration in the elevator car (Utsunomiya et al., 2004, 2006). A robust controller was designed to reduce horizontal vibrations of high-speed elevators using the Lyapunov method by Feng et al. (2009). Funai et al. (2004) showed a comparison between two active vibration dampers for super high-speed elevators. The first strategy uses active roller guides, and it is observed that this procedure is effective for elevators that are affected, mainly, by guide rail deformation. The second technique is an electromagnetic actuator installed between the car frame and platform, and this is more appropriate for elevators that are greatly affected by air pressure disturbance. Lopez et al. (2010) proposed the development of an adaptive control for active suspension of high-performance elevators, based on the pole-placement method, augmented with a self-tuning scheme for compensating the variations in the mass of the system as the number of passengers changes with time. The authors demonstrated that adaptive pole-placement can reduce the lateral vibrations in the base of the cabin and its efficiency is better than other control strategies, such as proportional–integral–derivative (PID), Sky Hook and pole-placement. In Chang et al. (2011), a high-speed elevator system was investigated in order to examine the characteristics of the excitations and analyze the dynamic responses due to the horizontal vibration generated from the elevator wheels running on rough and winding guide rails. An active mass driver based on the H∞ direct output feedback control algorithm was utilized to reduce the horizontal acceleration of the passenger car in the elevator. In Yang et al. (2014), an active control with time variant states using the Co-FXLMS (Correlation Filtered-X Least Mean Square) algorithm and MBPF (Moving Band Pass Filter) was proposed to control the cabin noise of the high-speed elevator. Zhang et al. (2014) obtained the exact value of fault probability of components in the elevator system by combining fuzzy theory with the Bayesian network approach. In addition is proposed a reliability analysis method of the multi-state system based on fuzzy Bayesian networks; the results provide a quantitative evaluation for the reliability of multi-state horizontal vibration of the elevator. Arrasate et al. (2014) conducted a study of vertical vibrations caused by torque ripple generated at the elevator drive system and its influence on passenger comfort during elevator travel. Experimental tests have been performed to study vertical vibrations of the car and counterweight assembly due to excitations generated at the drive system in an elevator installation. Venkatesh et al. (2002) presented a methodology for designing high performance of the LTI (linear time-invariant) controller by elevator vertical motion for high-rise buildings with high speed. Simulations show that the controller improves the vertical ride quality and is insensitive to parametric changes that typically occur as a result of normal wear and tear.
The State-dependent Ricatti Equation (SDRE) strategy is an interesting algorithm for synthesizing nonlinear feedback controls. It allows for nonlinearities in the system states while additionally offering great design flexibility through state-dependent weighting matrices (Çimen, 2010). It is an effective algorithm to suppress undesirable dynamic behaviors. It was first proposed by Pearson (1962), and has been applied in a wide variety of nonlinear control applications, such as autopilot design (Mracek, 2007), satellite and spacecraft control (Stansbery and Cloutier, 2000), micro electromechanical systems (MEMS) with chaotic behavior (Tusset et al., 2012a, 2013), Atomic Force Microscopy (AFM) systems with chaotic behavior (Nozaki et al., 2013; Balthazar et al., 2014b; Rodrigues et al., 2014), nonideal systems with chaotic behavior (Tusset et al., 2012b, 2012c) and control in nonlinear structural dynamical systems in the presence of noise (Sajeeb et al., 2007).
Motivated by the necessity to improve passenger comfort levels, our research aims to study and control the dynamic horizontal behavior of a three-degree-of-freedom model of a vertical transportation system excited by guide rail deformations. The translational equivalent stiffness of the spring referring the tilting motion of the cabin is modeled as a Duffing-type spring. With the use of the Duffing-type spring it is possible to analyze the small horizontal displacement of the elevator and the strain force of the vertical cable, similar to a hardening spring. As a strategy to control the horizontal vibrations, the SDRE method is used. Next, we perform extensive numerical simulation studies of the nonlinear behavior of the adopted mathematical model.
This paper is organized as follows. The mathematical model of the vertical transportation system is shown in Section 2. Results and discussion of the uncontrolled model are shown in Section 3. The control system design using the SDRE strategy with and without the presence of parametric errors and noise measurements is shown in Section 4. Finally, conclusions are drawn in Section 5.
2. Mathematical modeling
Figure 1 shows a schematic diagram of the cabin elevator. The roller guides support the platform with springs to avoid the transmission of external excitation caused by misalignment and deformation of guide rails. These roller guides and springs are components of the suspension system. Platform rubber elements are attached between the cabin and the frame to isolate vibrations.
Schematic diagram of the cabin structure.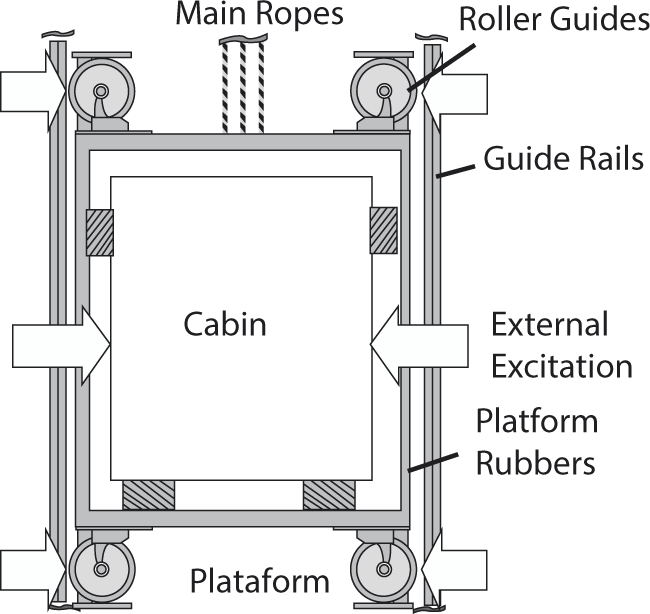
Figure 2 shows an equivalent physical model to represent the horizontal motions of an elevator system.
Equivalent model for the horizontal motion of the elevator.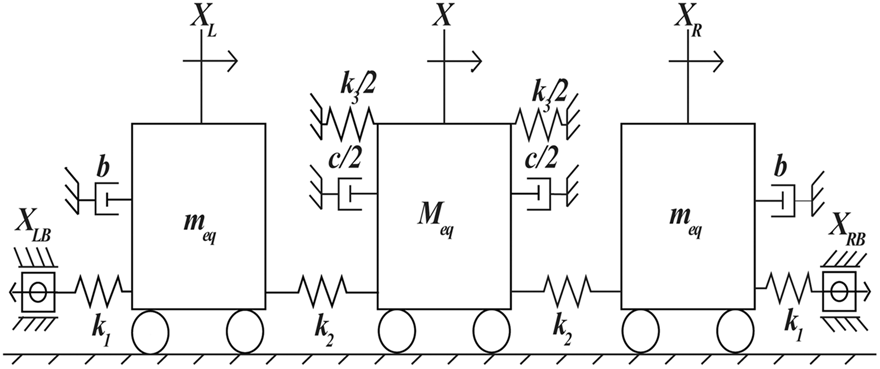
In a previous work, Lopez et al. (2010) proposed the physical parameters for a similar model to the one presented in this paper for the horizontal motion of the elevator (Figure 2) obtained from the model represented in Figure 1. Funai et al. (2004) showed experimental data obtained on the horizontal acceleration for the model shown in Figure 1, allowing, thus, one to examine the horizontal acceleration of the elevator, obtained by numerical simulation considering the parameters proposed by Lopez et al. (2010), and the horizontal acceleration of the elevator obtained from experimental data of Funai et al. (2004). In Figure 2, Meq is the mass of the cabin (kg), meq is the mass of the suspension system (kg), b is the damping coefficient of the suspension (N s/m), c is the damping coefficient of the cabin (N s/m), k1 is the stiffness coefficient of the guide rollers (N/m), k2 is the stiffness coefficient of the suspension (N/m), k3 is the stiffness coefficient of the elevator ropes referring to the tilting motion of the cabin (N/m), X is the displacement of the cabin (m), XL is the displacement of the left-hand suspension system (m) and XR is the displacement of the right-hand suspension system (m). XLB and XRB are external excitations caused by guide rail deformations, defined in equation (1)


Lopez et al. (2010) used equation (2) without the
In this regard, the potential energy of the spring (Epel) and the restitution force (Fel) associated with the nonlinear Duffing spring are as shown in equations (3) and (4), respectively (Kovacic and Brennan, 2011; Carrella et al., 2012; Beltrán-Carbajal and Silva-Navarro, 2014; Khan et al., 2014; Tu et al., 2015)


The Kinect (T) and Potential (V) energies of the system, shown in Figure 2, are represented in equations (5) and (6), respectively


The sum of conservative and nonconservative generalized forces (Qk) of the system can be written as follows

Considering the Lagrangian (Meirovitch, 1970)

The equations of motion that represent the vertical transportation can be obtained from (Meirovitch, 1970)

Using the Lagrange formulation (equations (8) and (9)) and considering equations (5)–(7) and

In order to obtain dimensionless equations of motion, we introduce the following dimensionless variables:
3. Dynamic behavior of the uncontrolled system
Parameters used for numerical simulations.
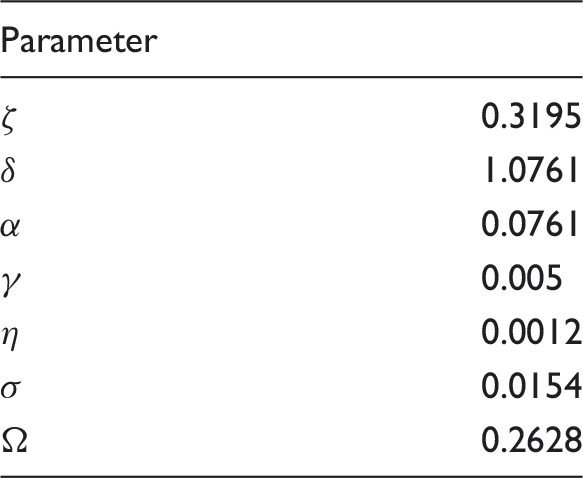
Figure 3 shows the bifurcation diagram obtained by varying the parameter Bifurcation diagram for the β parameter from 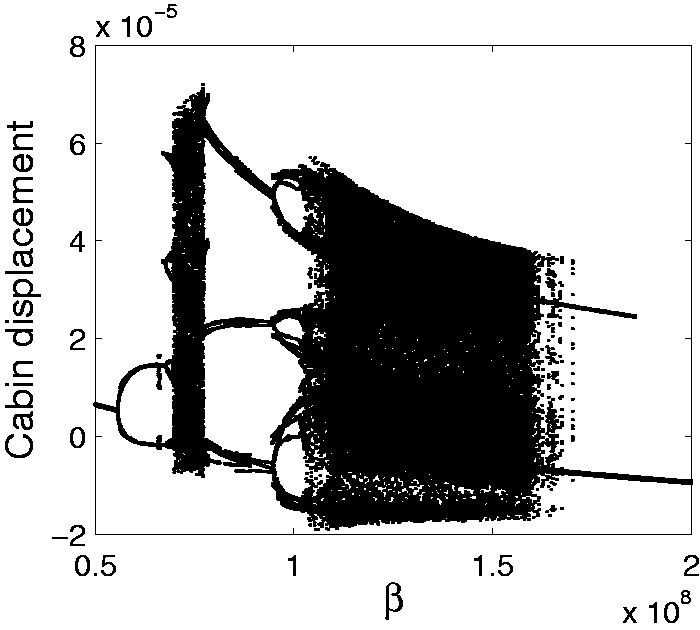
In Figure 3, it can be observed that the behavior of the cabin varies the beta parameter, considering the proportional change to the nonlinear term of the Duffing spring (
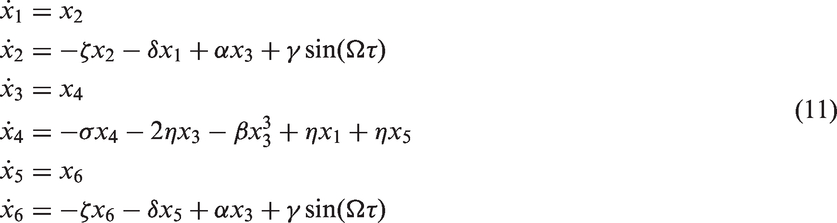
Our state space is composed of six states (equation (11)); therefore, the system has six Lyapunov exponents, one of which is always zero, in the direction tangent to the flow. Regarding the other five exponents, the maximum Lyapunov exponent is less than zero for a stable periodic orbit, whereas for a chaotic orbit the maximum Lyapunov exponent is greater than zero.
Figure 4 shows the maximal Lyapunov exponent as a function of β for the bifurcation diagram given by Figure 3, computed using the Wolf algorithm (Wolf et al., 1985). As can be seen, there is a correspondence between the bifurcation plots and the maximal Lyapunov exponent curve.
Maximum Lyapunov exponent (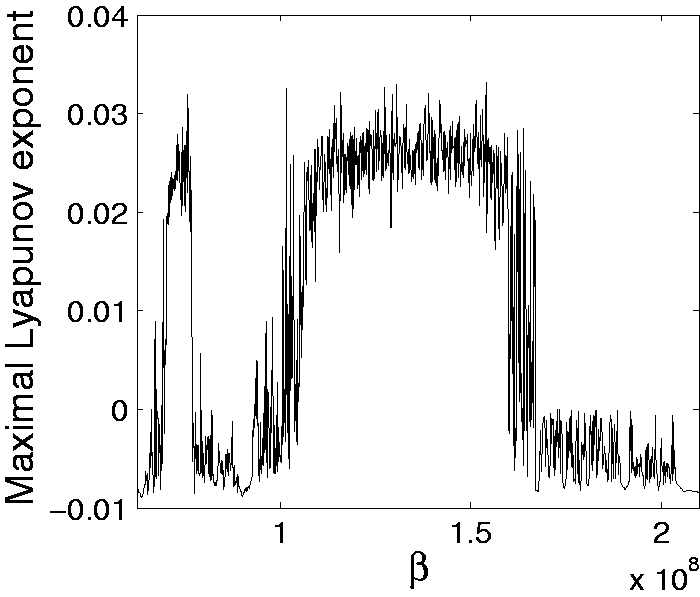
Figure 5 shows the result of the Kaplan–Yorke dimension of the two possible attractors of the cabin dynamics.
Kaplan–Yorke dimension (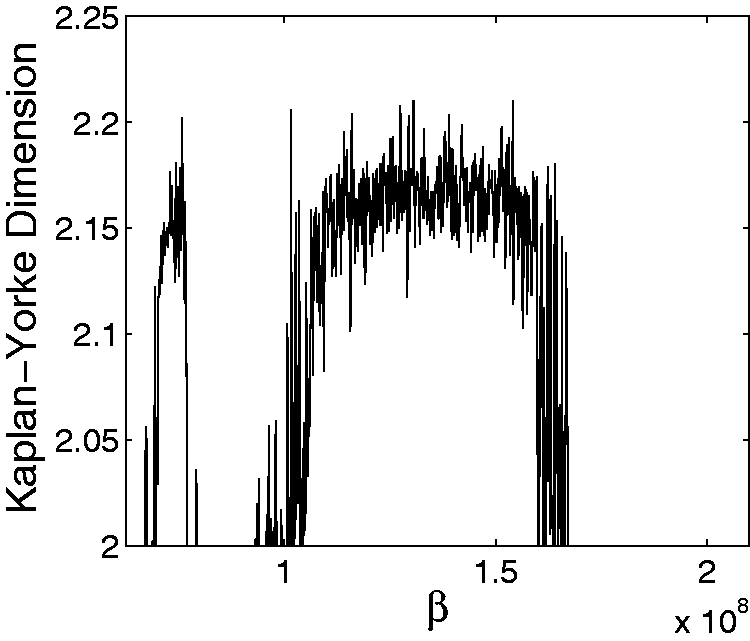
The Kaplan–Yorke dimension (Kaplan and Yorke, 1979) is calculated as follows

The dimensions of the chaotic attractor are always between 2 and 3, that is, the space attractor is topologically complex: more than a limit cycle and less than a three-dimensional object (Sharma et al., 2012). In order to compare the geometrical complexity of the phase space attractors, the Kaplan–Yorke dimension was calculated. Figure 6 shows the Poincaré map for the two different chaotic attractors of the system, and it is possible to note the complexity of these phase space attractors.
Poincaré map for (a) 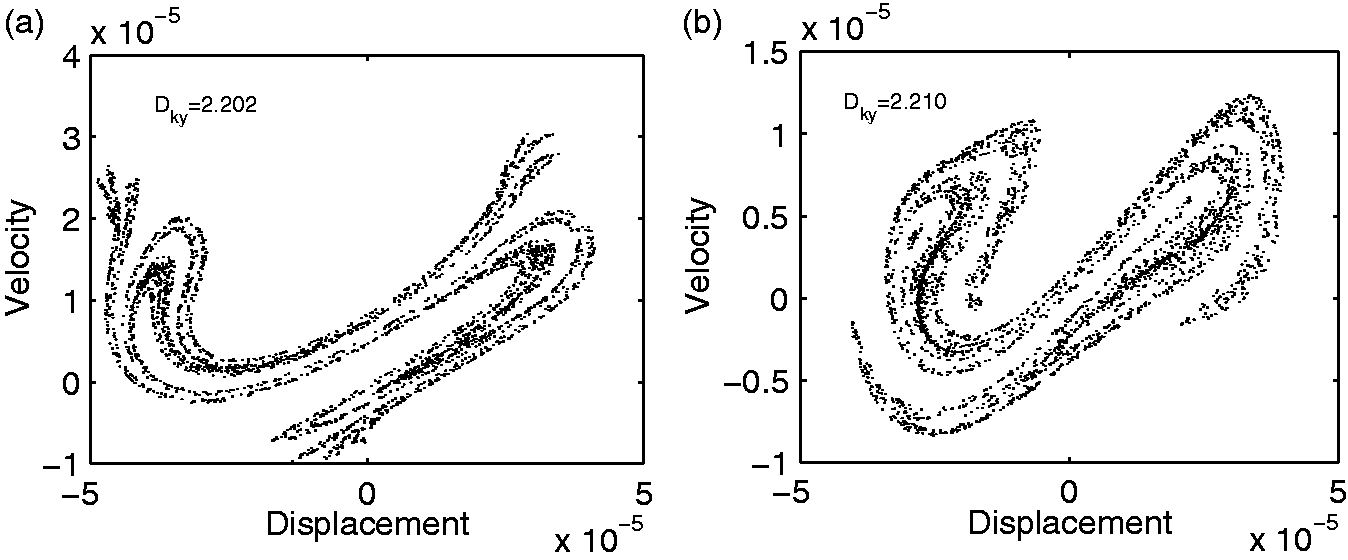
In Figure 6(a) it is possible to observe the first type of attractor obtained for this system. All the attractors in the interval
4. Nonlinear control design using the State-dependent Ricatti Equation technique
The control objective is to reduce the magnitude of the cabin’s acceleration and displacement in order to contribute to the preservation of the elevator’s component integrity and passenger comfort level. Consider now the introduction of an active controller damping parallel to the roller guide spring k2. In this way, the system given by equation (6), with the introduction of active control, can be represented as

It is possible to rewrite equation (13) in the following form



Tusset et al. (2013) gave the following state feedback control law


The cost function for the regulator problem in equation (18) is given by Tusset et al. (2012c)

The choice of
4.1. Application of SDRE control
The control signal 

For simplicity we will restrict ourselves to using only constant values for matrices
Another important factor to consider is that matrix 
The SDRE technique to obtain a solution for the dynamic control problem has the following procedure (Tusset et al., 2015).
Define the state-space model with the state-dependent coefficient as in equation (15). Define Solve the Riccati Equation (19) for state Calculate the input signal from equation (18). Integrate equation (14) and update the state of the system Calculate the rank of equation (23); if
Figures 7 and 8 show the comparison of the behavior of the system without control and with the SDRE control strategy, when Comparison between uncontrolled (black) and controlled system using the State-dependent Ricatti Equation (SDRE) technique (red) cabin response for 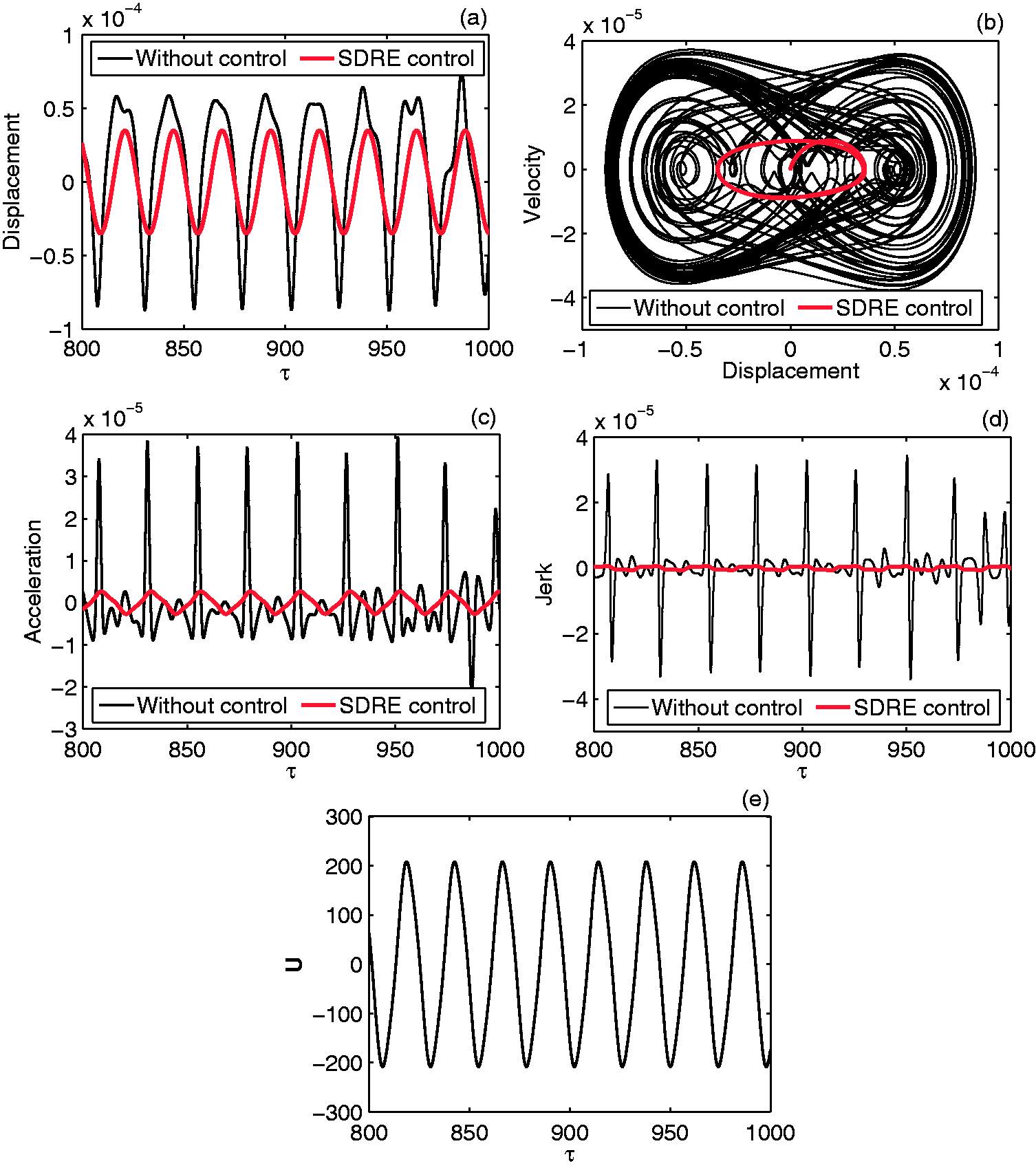
It is possible to observe that the proposed SDRE control reduced the system’s oscillation amplitude (Figures 7(a) and 8(a)). In addition, the SDRE control has driven the system dynamics to a periodic orbit (see Figures 7(b) and 8(b)). We can measure the performance of control using the root mean square (RMS) of the controlled system. The RMS of the time history of the acceleration shown in Figure 7(c) is Comparison between uncontrolled (black) and controlled system using the State-dependent Ricatti Equation (SDRE) technique (red) cabin response for 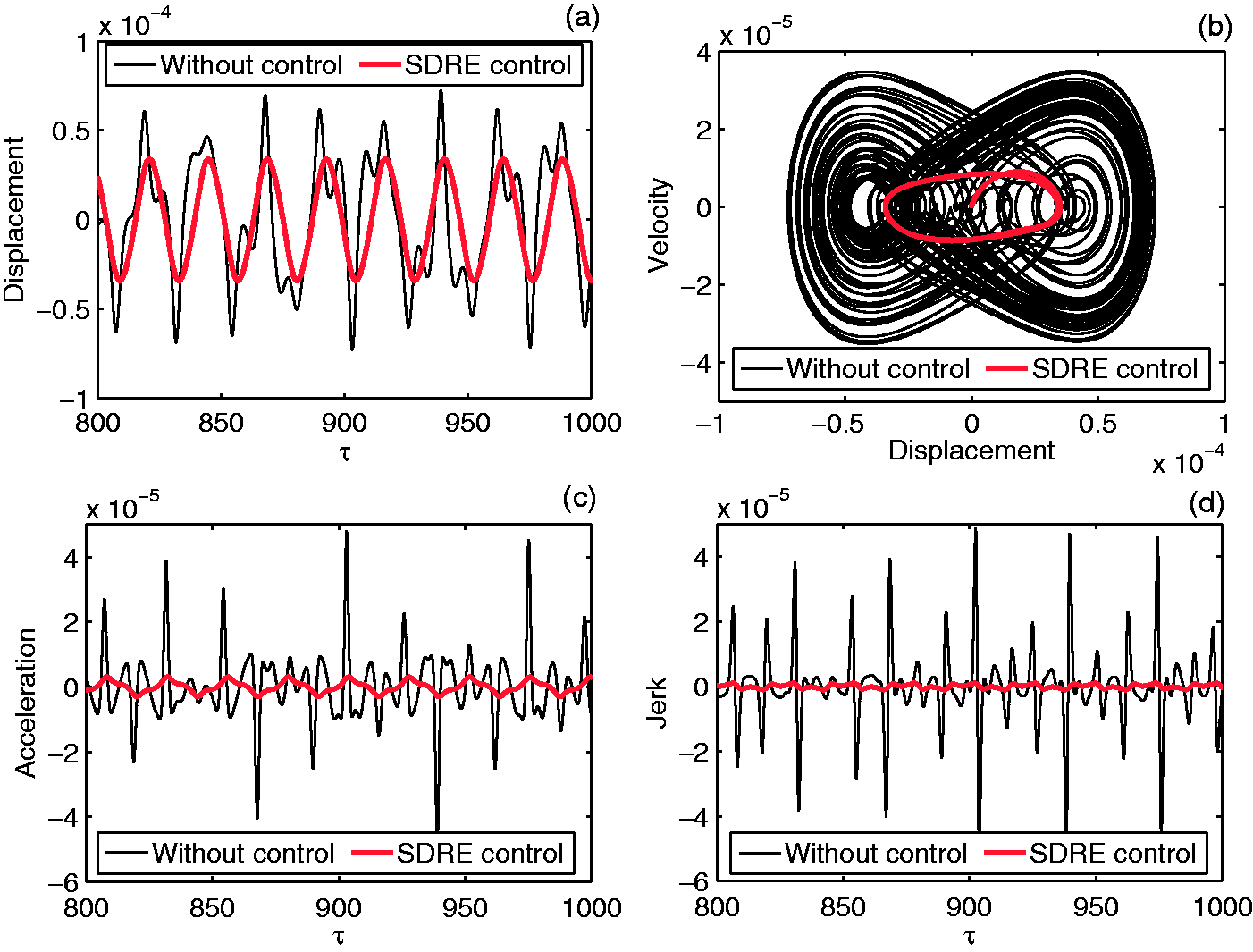
The variations of the control signal used in the SDRE technique, for both values of β, are presented in Figures 7(d) and 8(d), respectively. Because the control signal has low values, it can be considered as a magnetorheological, pneumatic, hydraulic or even an electromagnetic actuator. The application of a magnetorheological damper can control the damping force by the applied electric current, as applied by Tusset et al. (2012b, 2012c). An electromagnetic actuator can be used as in the strategy of the Oh et al. (2006), which used active control based on the repulsive forces of electromagnets to reduce lateral disturbances, or the strategy of the Utsunomiya et al. (2004, 2006), which used adequate lateral forces through electromagnetic actuators to reduce lateral disturbances of the elevator.
4.2. Controlled system in the presence of parametric errors and noise measurements
Control designs based on the parameters of a certain mathematical model will often not represent the real dynamics (Tusset et al., 2015). Consequently, the control design will not operate as intended when applied in a real process, because the parameters used in the control may contain parametric uncertainties. The parametric uncertainties are associated with discrepancies between system actual physical values and the numerical parameters used in the analysis. To solve this problem, researches have focused on incorporating the uncertainties associated with real systems into numerical simulations for reliable predictions (Triguero et al., 2013). To consider uncertain parameter effects on the control performance, parameters δ, ζ, α, η, β, σ, γ, κ and χ used in the matrix of state variables
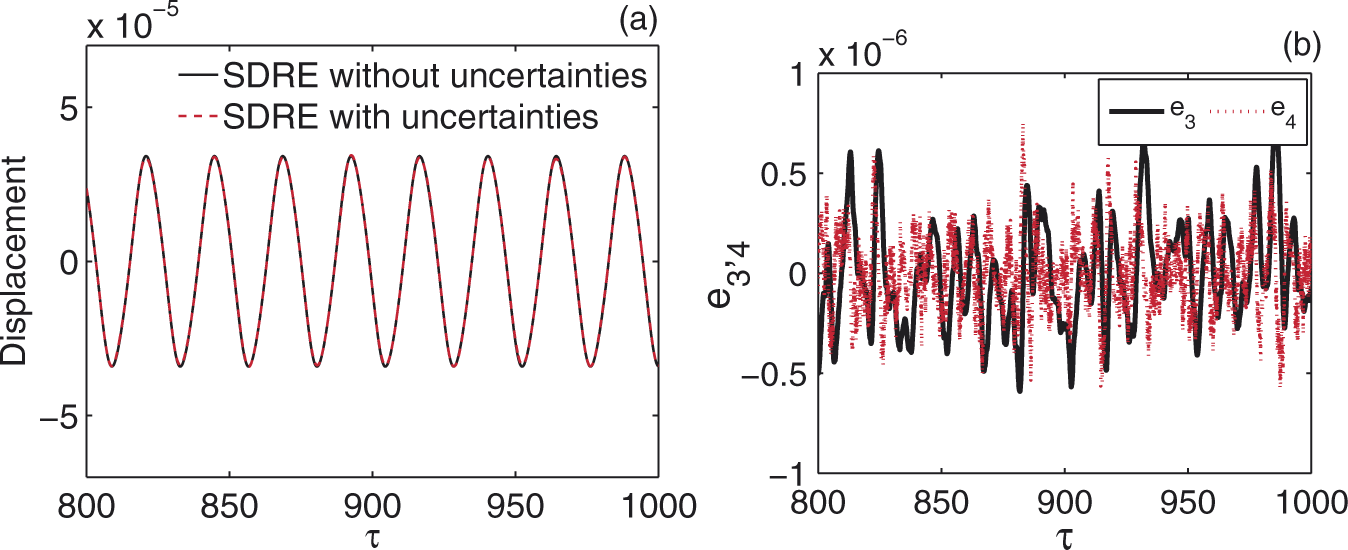
In Figures 9–11 we observe the robustness of the control to maintain the system in periodic orbit with displacements near to those obtained using SDRE control for uncertainties, when Parameter uncertainties in Parameter uncertainties in Parameter uncertainties in 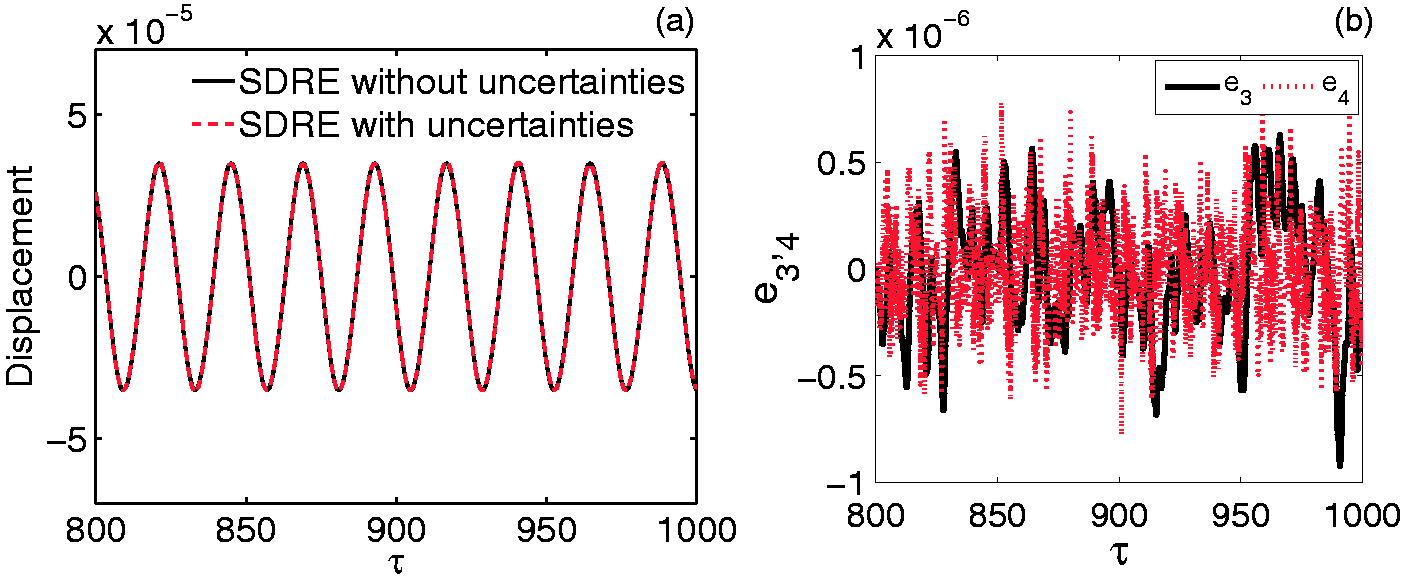
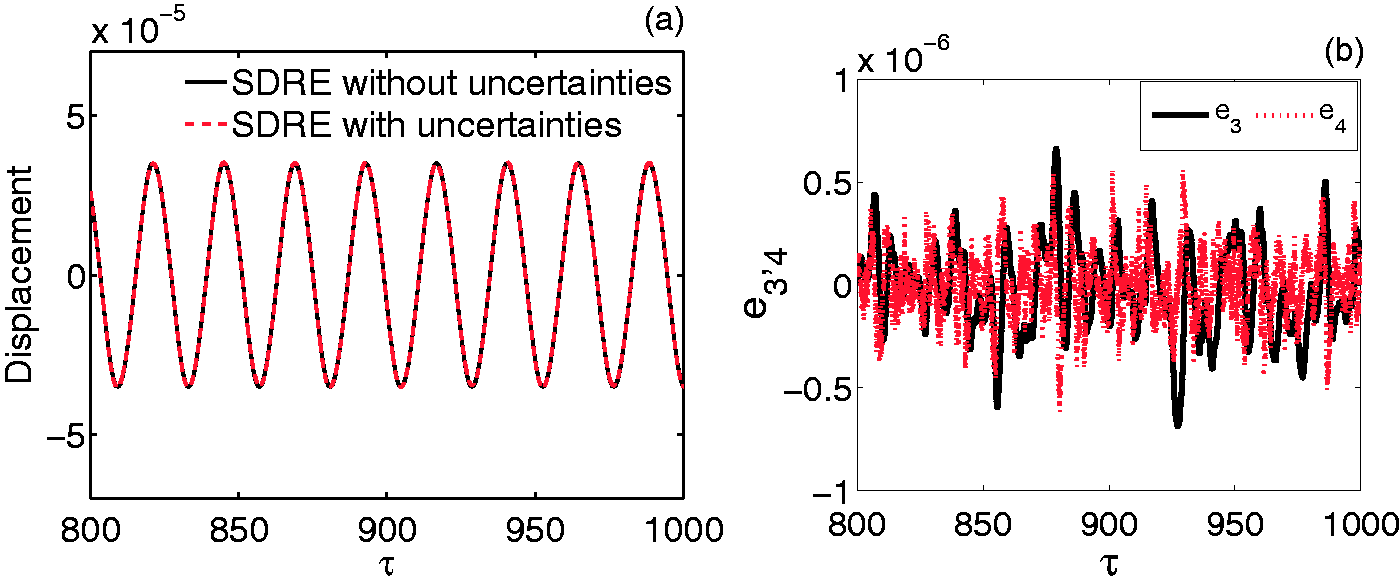
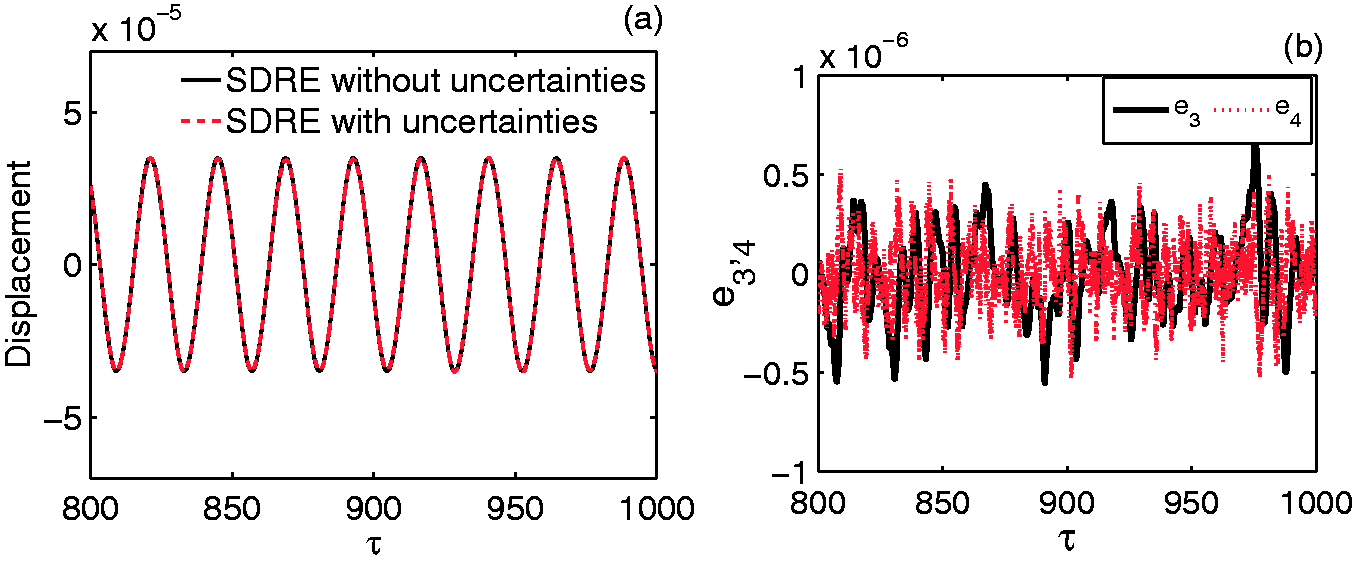
The robustness for the second attractor, Parameter uncertainties in 
It is possible to observe that the proposed SDRE control is effective in controlling the chaotic orbit of the nonlinear system, even in the presence of parametric errors and noise, as can be observed in Figures 9(a)–14(a). The errors in displacement ( Parameter uncertainties in Parameter uncertainties in 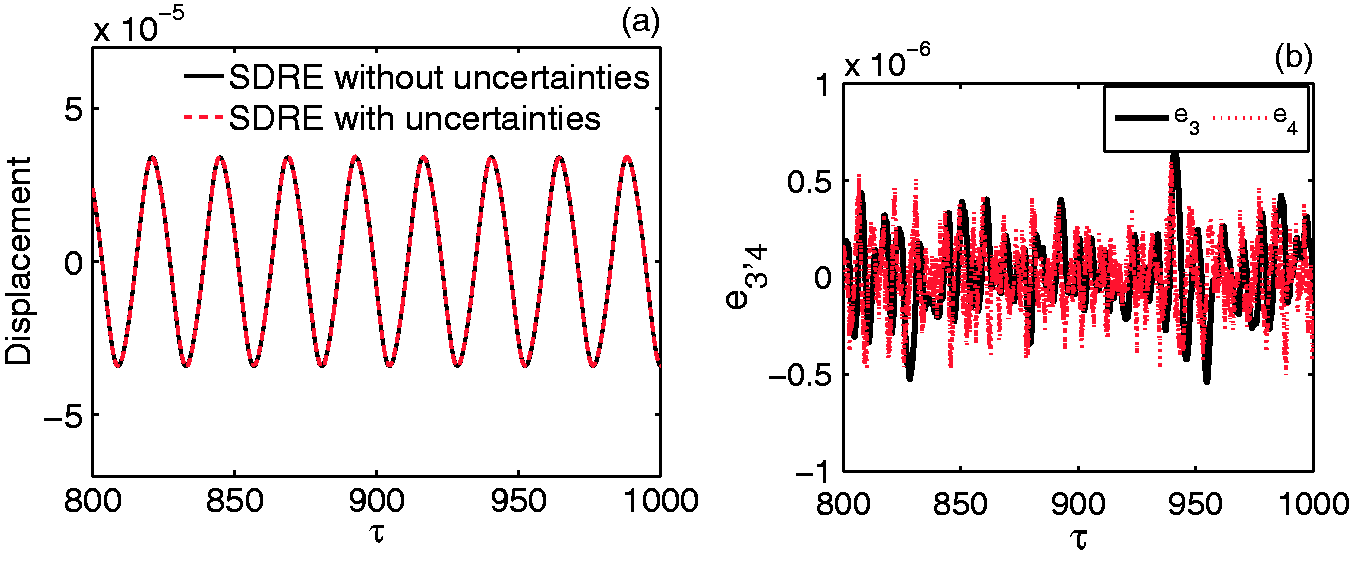
5. Conclusions
This paper presented the horizontal dynamic behavior of a vertical transportation system harmonically excited by guide rails, as well as a proposal for a control strategy using the SDRE technique. The nonlinear dynamic system, with a pure cubic Duffing spring representing the influence of the traction cable on the system, was analyzed. We observed that the response of the system was highly influenced by the nonlinear term of the Duffing spring. This system presents different qualitative responses, such as periodic or chaotic behavior, depending on the nonlinear Duffing spring parameter used. Using the SDRE control technique described in this work, the chaotic attractor shown in Figures 7 and 8 could be controlled to a periodic orbit even in the presence of parametric errors and noise. It could be established, as a consequence of the obtained results, that there was a decrease of the amplitude of the cabin’s motions. In addition, the SDRE control can be used to contribute to the preservation of the elevator component integrity. It is possible to observe that the amplitude of the acceleration was reduced and, therefore, an increase in the passenger comfort level during the motion of the elevator may be detected.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.