
Abstract
Theoretical and experimental studies are conducted to control nonlinear vibration of a two-link flexible manipulator via internal resonance. A vibration control method is proposed and an effective vibration absorber is implemented based on a servomotor to establish a 2:1 internal resonance relationship with the flexible manipulator. By way of perturbation analysis, it is proven that internal resonance can be successfully established for the flexible manipulator undergoing rigid motion. In the presence of damping, the vibration energy of the flexible manipulator can be transferred to and dissipated by the vibration absorber via internal resonance. Numerical simulations and experimental investigation have verified the effectiveness and feasibility of the proposed method.
1. Introduction
With the development of robotic manipulators for use at high speed, with heavy loads, precise motion and large work spaces, various vibration problems have become the main reasons for the deterioration of their dynamic performance. Consequently, how to alleviate the influence of adverse vibration of flexible manipulators is an important issue (Heidari et al., 2011, 2015).
Due to the small amount of damping, low stiffness, and strong nonlinearity, vibration control of flexible manipulators becomes extremely difficult, and thus has attracted much attention in the past two decades. Several passive control methods have been put forward, including the optimization of shapes and dimensions, adopting composite materials, etc. (Krishnamurthy et al., 1990; Gordaninejadd et al.,1992; Ghazavi et al., 1993; Cui and Xiao, 2003; Dixit et al., 2006). Furthermore, a number of active control schemes have been developed, including PID control, adaptive control, robust control, neural network control, input shaping, sliding mode control, variable structure control, and so on (Theodore and Ghosal, 2003; Sasaki et al., 2009; Abiko and Yoshida, 2010; Ahmad et al., 2010; Mahamood and Pedro, 2011; Mojtaba et al., 2011; Orszulik and Shan, 2011).
In recent years, a novel method for vibration control based on internal resonance has been suggested. It is different from other methods in that it does not purposely avoid but utilizes sufficient nonlinear coupling between the modes to dissipate vibration energy, exhibiting a potential advantage in combating strong nonlinear vibration. When internal resonance occurs, the vibration energy of one mode may be transferred back and forth between the related modes. In the presence of damping, vibration can be alleviated through the damping of the related modes.
Golnaraghi (1991) and Golnaraghi et al. (1994) were the first to try to reduce large amplitude oscillations of a flexible cantilever beam using internal resonance. A 1:2 internal resonance relationship was established between the beam and the slider. Vibration of the beam was absorbed by the slider and dissipated through the slider damping. Tuer et al. (1993) and Duquette et al. (1993) controlled the vibration of a similar beam using a rotational internal resonance controller at the tip of the beam. In addition, Tuer et al. (1994) proposed two methods based on internal resonance, i.e. the disabled torque and dissipated energy methods, to control a flexible cantilever beam. Oueini and Golnaraghi (1996) built and experimented upon an analog electronic controller. Khajepour et al. (1997) used the center manifold theory to control the vibration of a flexible beam. However, these flexible beam models are treated as a rigid beam connected by a linear torsional spring. Obviously, this assumption is not suitable for the analysis of a real flexible arm. The studies mentioned above have recently been extended to the distributed flexible beam. Pai et al. (2000) designed a higher order internal resonance absorber to decrease the vibration of a cantilevered plate. Ashour and Nayfeh (2002) used an adaptive controller to control a flexible structure via internal resonance and saturation. Yaman and Sen (2007) absorbed the vibration of a cantilever beam using a tip mass and a pendulum attached to the tip mass. Hui et al. (2011) reduced the source mass translation vibration by transferring the internally resonant energy from a symmetrical to an anti-symmetrical mode.
Although remarkable progress has been made, research upon the flexible manipulator is still needed. Firstly, all of the abovementioned studies only concerned the flexible beam and did not involve the flexible manipulator. Unlike the former, the flexible manipulator possesses large-scale joint motion, and thus exhibits much more complex behaviors resulting from the dynamic coupling between joint motion and flexural vibration. Secondly, for simplicity the main system, i.e. the flexible beam, is usually viewed as a linear vibration model. However, the flexible manipulator itself is a complex nonlinear dynamic system. As a result, unreasonable linearization may lead to fundamental mistakes. Thirdly, some authors artificially introduced certain nonlinear coupling terms to improve control results. But the corresponding implementation schemes and experiments were not described in detail and their control effects were not verified.
To the best of our knowledge, little research work has been conducted on controlling large amplitude nonlinear vibration for the flexible manipulator via internal resonance, and no related experimental investigations have been reported either. Therefore, whether internal resonance can be successfully established for the flexible manipulator must be researched. Moreover, the theoretical and practical feasibility of decreasing nonlinear vibration for the flexible manipulator should be examined.
In this paper, a vibration control method based on internal resonance is put forward for the two-link flexible manipulator. Internal resonance is used as an important bridge to transfer and dissipate the nonlinear vibration energy of the main system. An effective vibration controller based on a servomotor is designed to establish a 2:1 internal resonance relationship with the flexible manipulator. In the presence of damping, the vibration energy of the flexible manipulator can be transferred to and dissipated by the vibration absorber through internal resonance. By means of numerical simulations and experimental investigation, the feasibility and effectiveness of this control method are successfully verified.
2. Mathematical model
This paper studies a two-link manipulator with final flexible link, as shown in Figure 1. Link 1 is a hollow uniform rigid beam with length l1, thickness δ, with a rectangular cross-section of width s1 and height s2. Link 2 is a uniform thin Euler–Bernoulli flexible beam with length l2, with a rectangular cross-section of height h and width b. Only the flexible deformation w(x2,t) about the y2 axis in the plane o2x2y2 is considered, where t is the time. The joint o1 and o2 provide rigid motion of the links around the z1 and z2 axis, denoted by q1 and q2, respectively.
Model of the two-link flexible manipulator with a vibration absorber.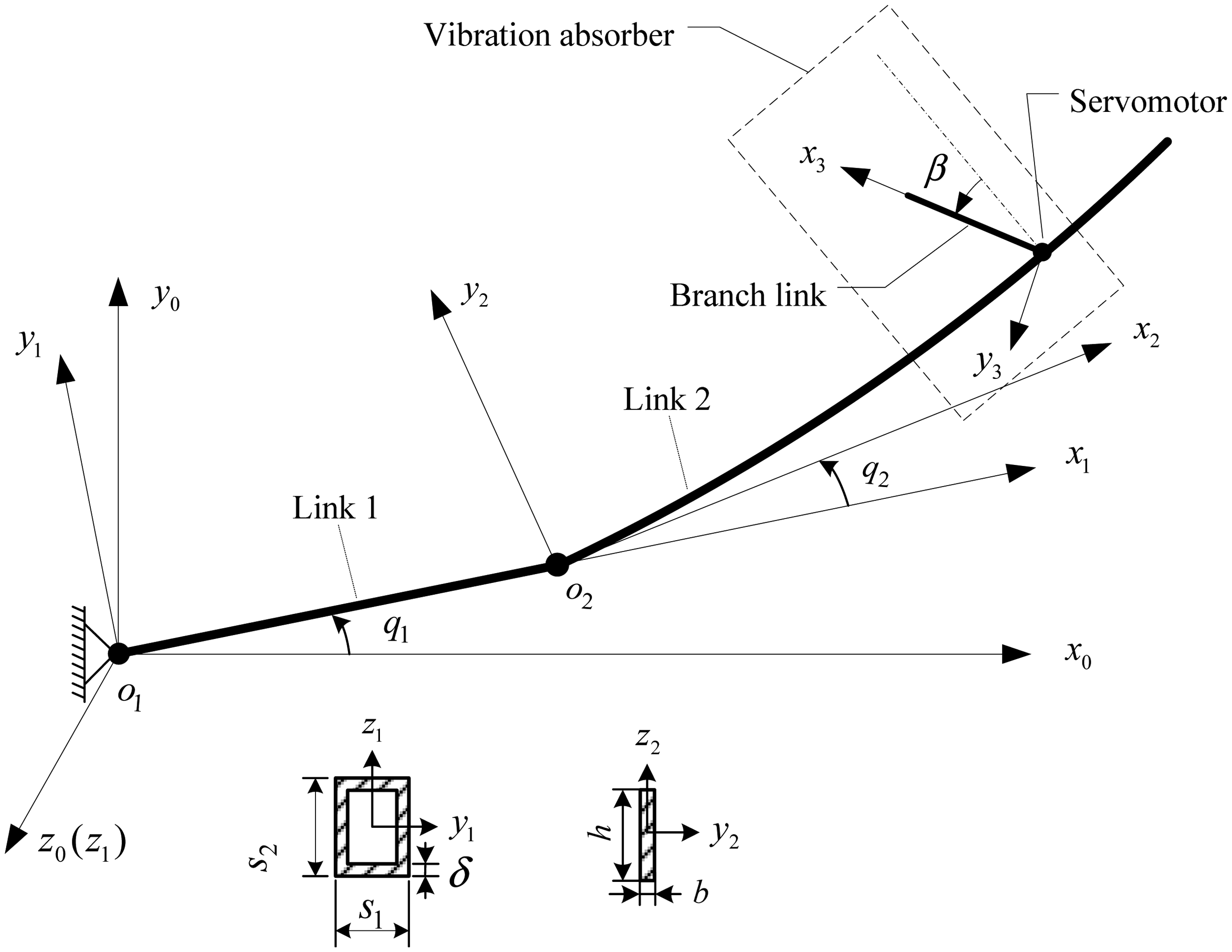
To control the vibration of the flexible manipulator, a vibration absorber consisting of a servomotor and a branch link (i.e. a rigid link) is attached to the flexible link at x2 = r. The branch link with the length rc3 and mass m3 is connected to the servomotor at an initial angle of 90° to the flexible link. It can rotate around the z3 axis in the plane o2x2y2. Through adjusting the velocity feedback gain kd and position feedback gain kp, the servomotor control system can serve as the damping and elasticity components of a vibration absorber. If the branch link deviates from its initial position, the controller will rectify the deviation angle β in terms of PD control algorithm with appropriate kd and kp.
Based on Kane’s method, dynamics equations for the flexible manipulator and the vibration absorber are derived and can be written as (Bian et al., 2011)

Equation (1) can be separated into two equations describing the dynamics of


Equation (3) describes the flexible dynamics of the flexible manipulator and vibration absorber. It plays an important role in vibration control. By analyzing nonlinear coupling between the flexible manipulator and vibration absorber in equation (3), internal resonance is expected to be established and used to reduce vibration. Since our method aims to control the vibration of the flexible manipulator, and its implementation mainly relies on the vibration equation, only equation (3) is considered here.
The transverse deformation

In this paper, only the fundamental mode of the flexible link is studied due to its dominant contribution to the vibration response in most cases. Therefore, the flexible dynamics equations about the fundamental mode coordinates u1 and the flexural degree of freedom β of vibration absorber are derived from equation (3) and can be written as


From equation (6), it is seen that
Using the transformations



The method of multiple scales is used to solve equations (8) and (9). To this end, a scaling factor



3. Perturbation solution
Using the method of multiple scales, the timescales are defined as

Then, the first-order approximate solutions to equations (8) and (9) take the form


According to equation (13), the time derivatives about τ are transformed in terms of T0 and T1, i.e.


Substituting equations (14)–(17) into equations (11) and (12), then equating coefficients of the same order of ɛ on both sides, the following differential equations are obtained.
Order (


Order (


Equations (18)–(21) can vary with the joint motion, which is an important difference from the flexible structure.
The solutions to equations (18) and (19) take the complex form


Substituting equations (22) and (23) into equations (20) and (21) gives
To obtain solutions of equations (24) and (25), the solvability conditions should be determined.
4. Analysis of internal resonance
Whether internal resonance can be successfully established for the flexible manipulator should be investigated. Since only the second-order nonlinear terms exist in equations (5) and (6), the 2:1 internal resonance condition is analyzed. Therefore, a detuning parameter σ is introduced as



Substituting equations (27) and (28) into equations (24) and (25) gives
From equations (29) and (30), the solvability conditions are


For convenience,


Substituting equations (33) and (34) into equations (31) and (32), then separating the result into real and imaginary parts, gives





Eliminating

Therefore, the solvability conditions are reduced to the solution of equations (35), (36), and (40).
To investigate the energy transfer between the flexible manipulator and vibration absorber, the undamped case (i.e.



Multiplying equation (41) by a1 and equation (42) by

In equation (43),
5. Vibration control based on internal resonance
Although vibration energy can be transferred via internal resonance from the flexible manipulator to the vibration absorber, it cannot be dissipated in the absence of damping. To reduce vibration, damping of the vibration absorber should be taken into account.
In the presence of damping (i.e.

As a result, from equations (35), (36) and (40)



By inspection, it is easy to find that the system possesses an infinite number of equilibrium points defined by

Therefore, by evaluating the Jacobian, one can ascertain the stability of the system.
The Jacobian matrix for this case is

The corresponding eigenvalues are
By way of numerical integrations of equations (35), (36), and (40), it is found that, in the presence of damping, the vibration energy is continually exchanged between the flexible manipulator and vibration absorber, and dissipated simultaneously by the damping of the latter.
6. Theoretical simulations
6.1. Numerical simulations
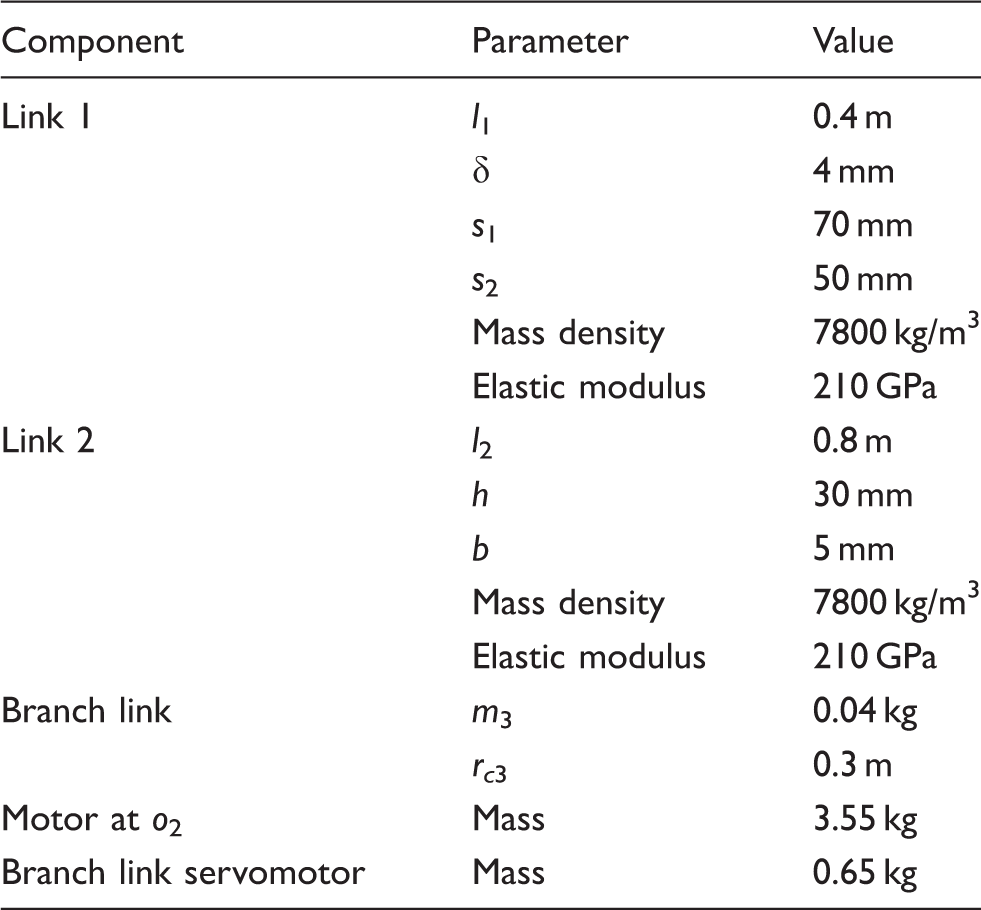
Parameters of the two-link flexible manipulator.
Suppose the rigid motions of the flexible manipulator are

If the flexible manipulator is not equipped with the vibration absorber, given the initial disturbance
Response of the end-effector.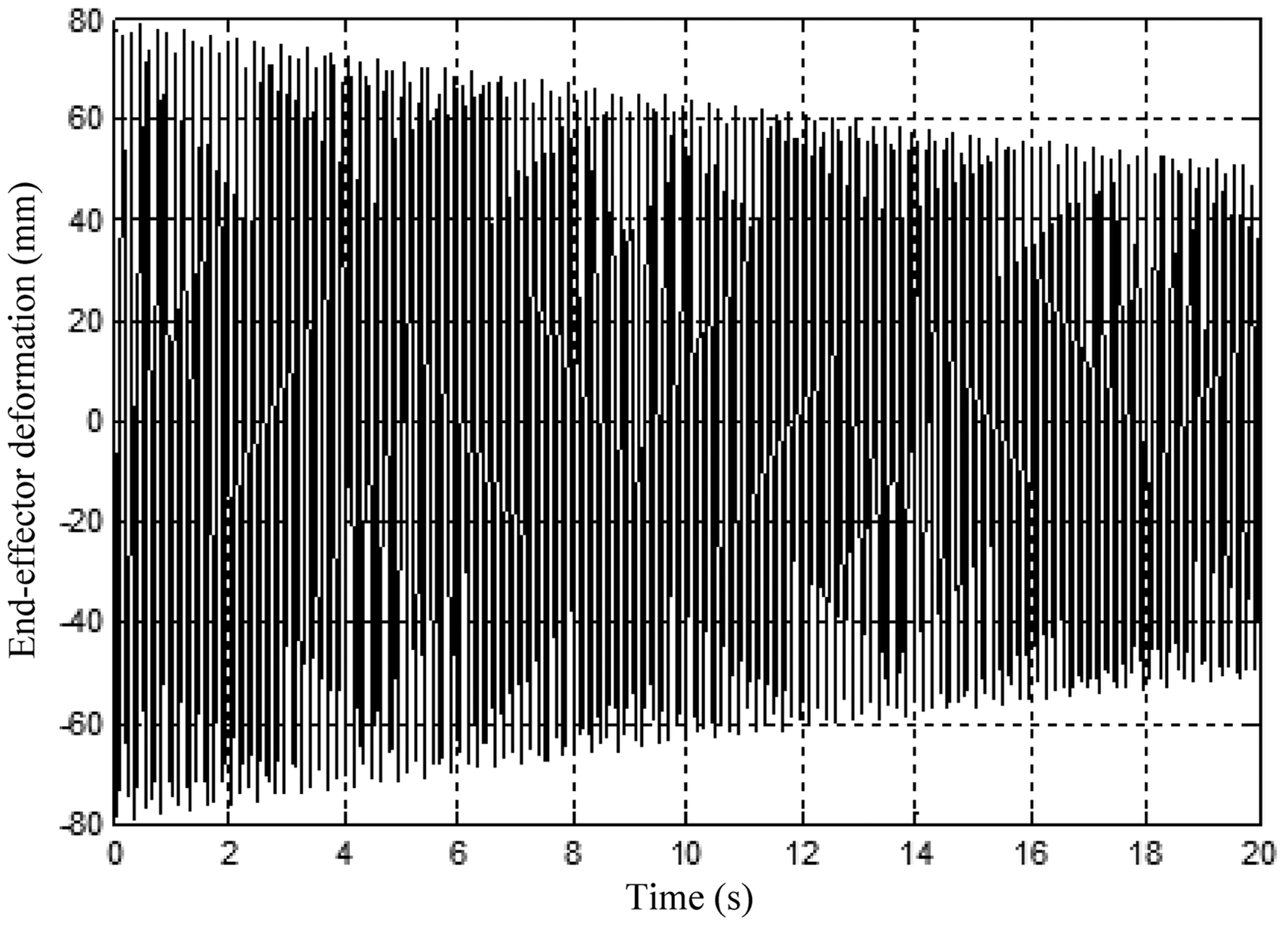
To control the vibration of flexible manipulator, a vibration absorber based on a servomotor is attached to the flexible link. In this example, the fundamental frequency of the flexible manipulator is 4.34 Hz. According to the 2:1 internal resonance condition, the frequency of the vibration absorber is tuned to 2.17 Hz. In the absence of damping, by numerically integrating equations (35), (36), and (40), the modal amplitudes a1 and a2 are obtained, and are shown in Figure 3. As can be seen, the peaks and troughs of these two modal amplitudes are exactly anti-phase with each other. Since the vibration energy is proportional to the square of the amplitude, the vibration energy of a1 is the largest in the peak and the smallest in the trough, as is the case for a2. Therefore, if a1 descends and a2 ascends, it means that the vibration energy is being transferred from a1 to a2, and vice versa. This phenomenon indicates that internal resonance has been established and the vibration energy is continuously exchanging between the two vibration modes.
Relationship of a1 and a2.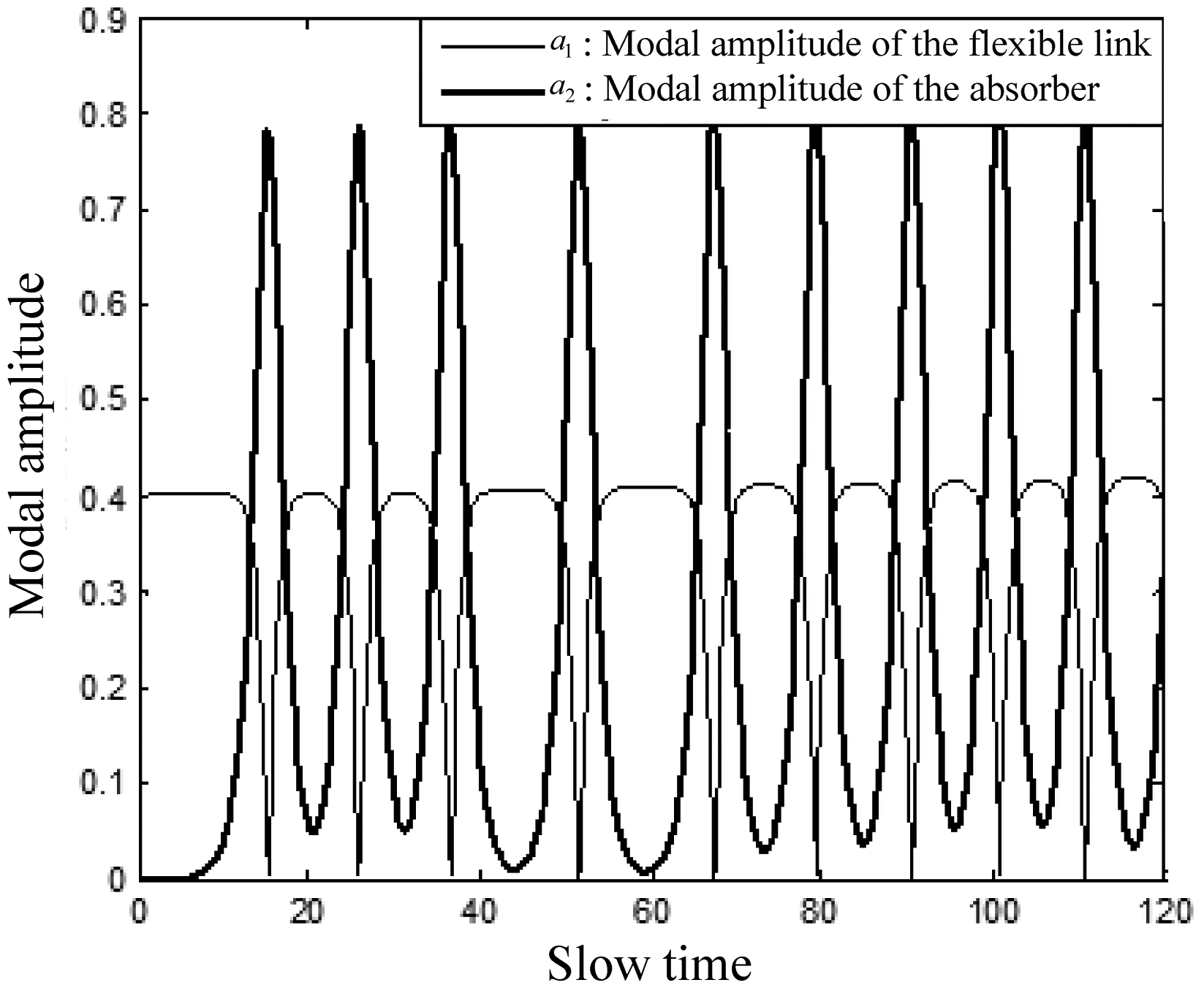
The end-effector deformation of the flexible manipulator is shown in Figure 4. As can be seen, it descends almost to zero abruptly, resulting in the beat phenomenon. Also, a similar phenomenon arises in the vibration responses of the vibration absorber, as shown in Figure 5. For comparison, these two figures are shown in Figure 6. It is found that when the amplitude of the flexible manipulator decreases abruptly, the amplitude of the vibration absorber increases abruptly at the same time, and vice versa. It is again verified that internal resonance has been successfully established, and the vibration energy is being exchanged between the flexible manipulator and vibration absorber.
Undamped response of the flexible manipulator. Undamped response of the vibration absorber. Comparison of vibration responses.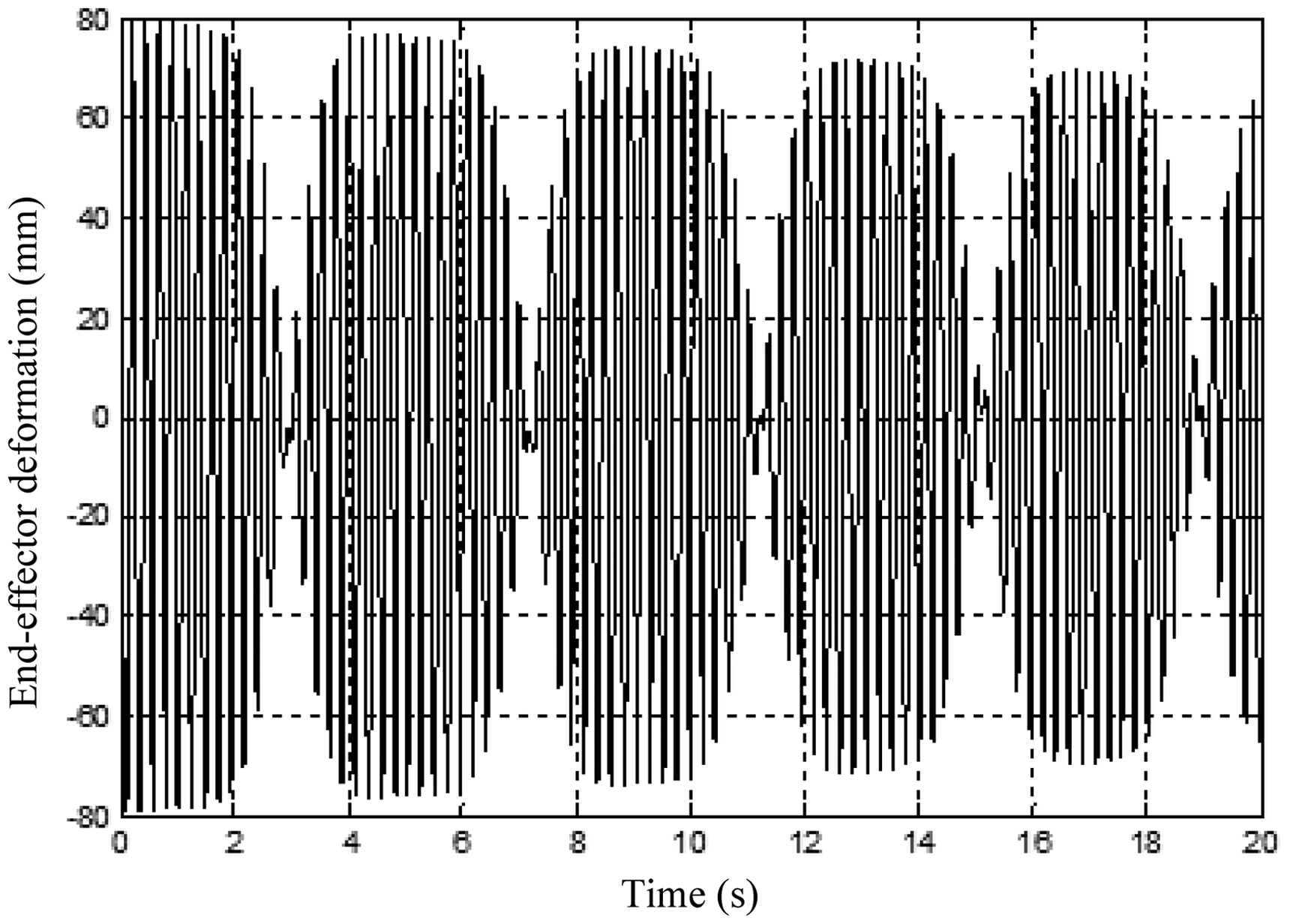
When damping of the vibration absorber is taken into account, e.g.
Damped response of the flexible manipulator. Damped response of the vibration absorber.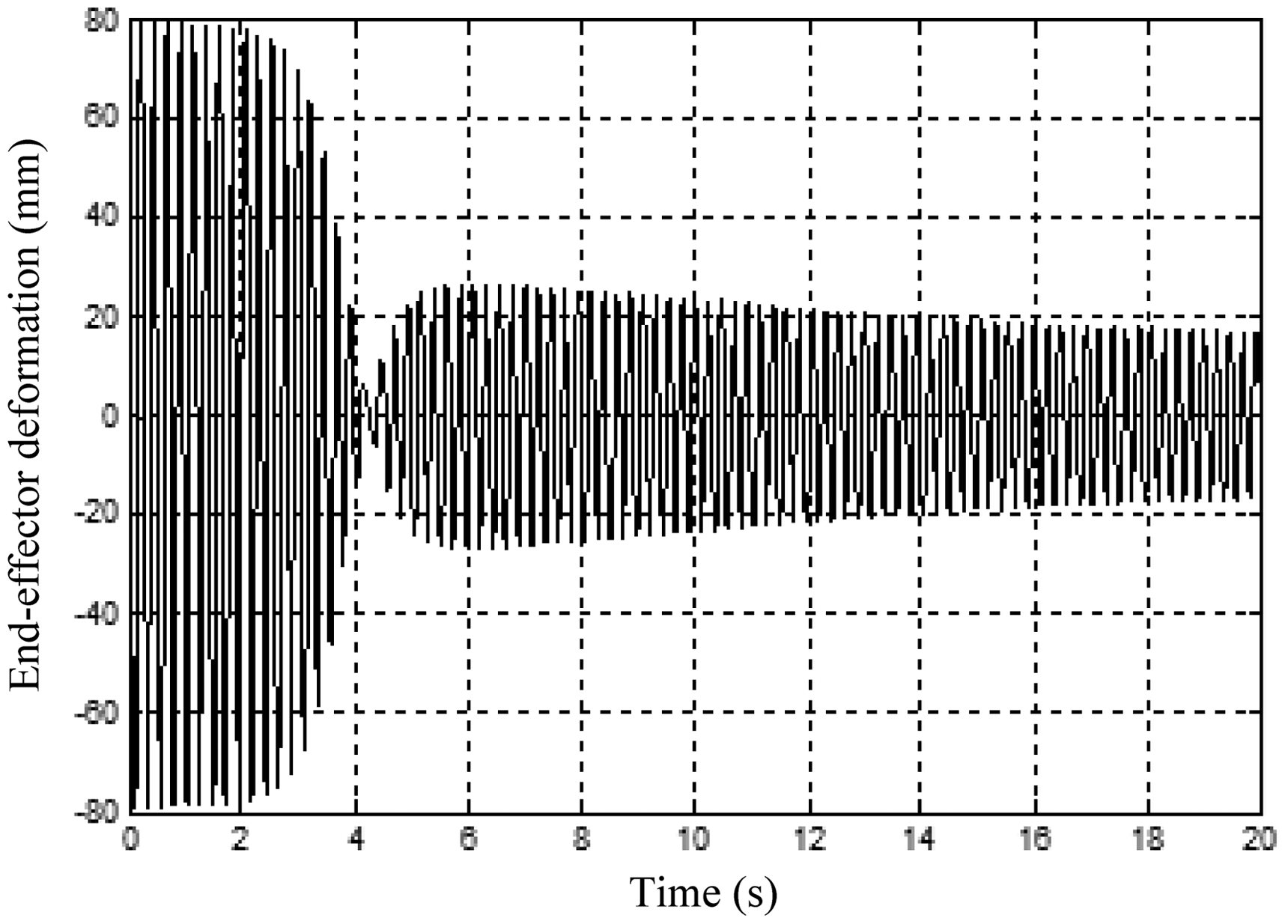
When the damping of the vibration absorber is increased, e.g.
Damped response of the flexible manipulator. Comparison of vibration responses.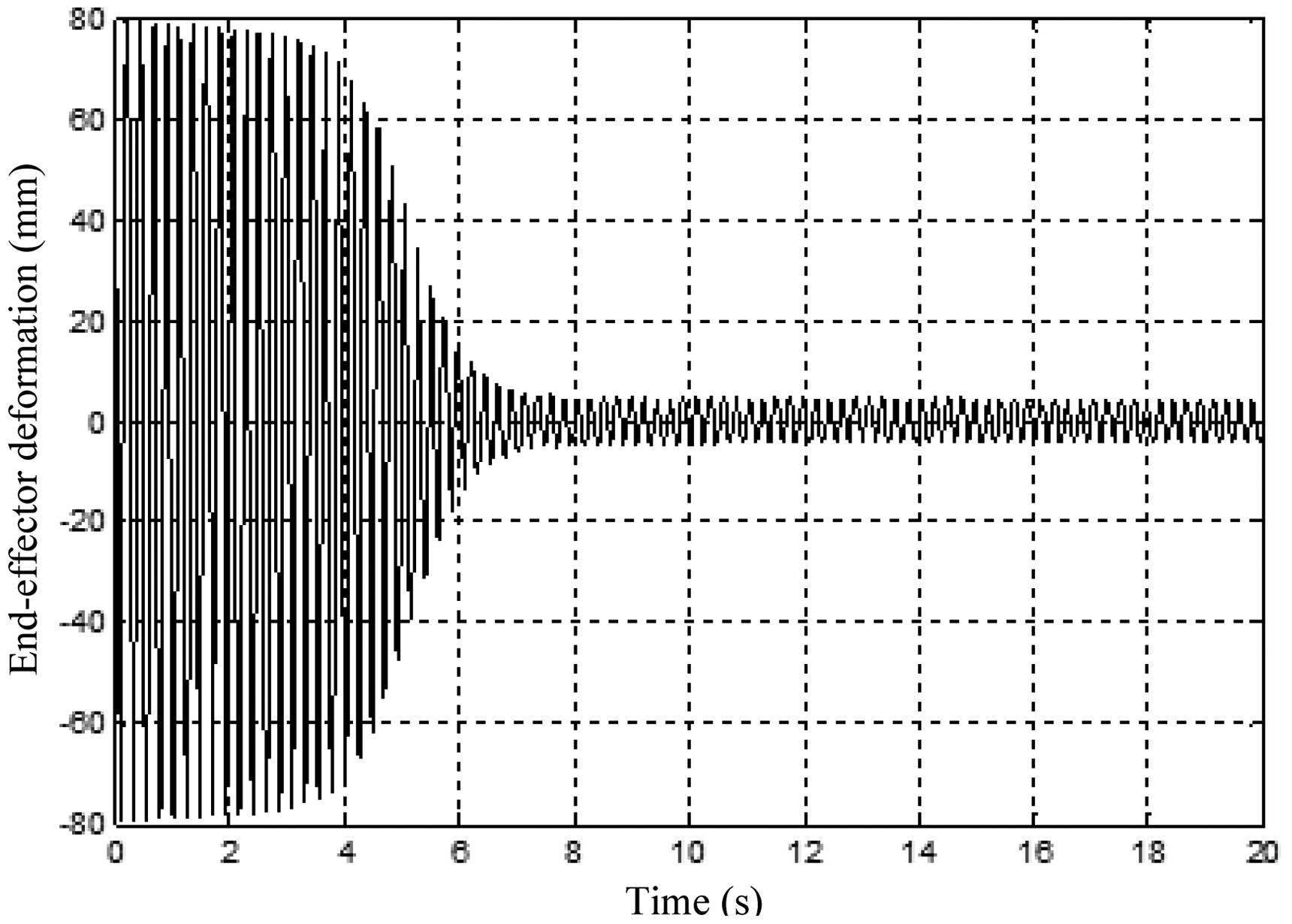
6.2. Virtual prototyping simulations
To examine the correctness of the theoretical analysis and provide good guidance for experimental investigation, virtual prototyping technology is used in this section to validate the proposed method via ANSYS (Pennsylvania, USA), ADAMS (MSC Software Corporation, Newport Beach, CA), and MATLAB software (MathWorks Corporation, Massachusetts, USA). Parameters of the flexible manipulator and vibration absorber are listed in Table 1.
Suppose the rigid motions of the flexible manipulator are the same as those given by numerical simulations. If the flexible manipulator is not equipped with the vibration absorber, given the initial disturbance
End-effector deformation of the flexible manipulator without the vibration absorber.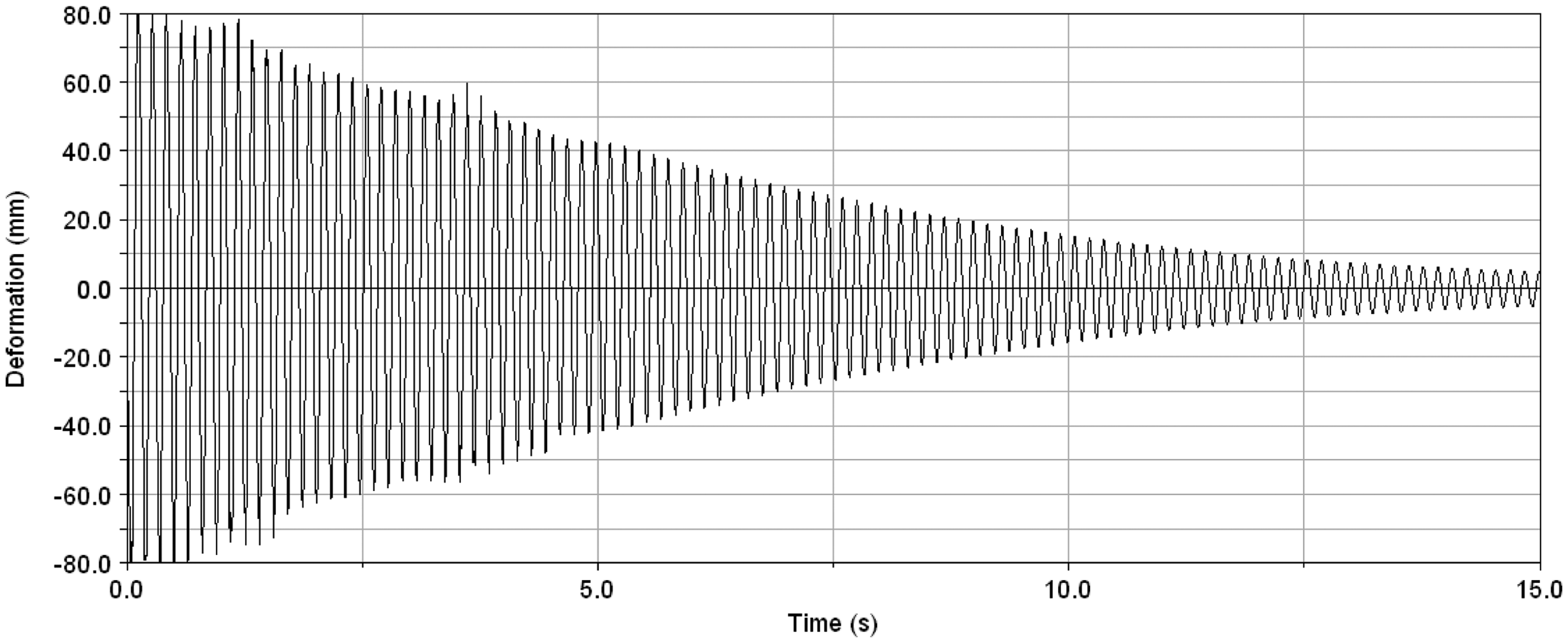
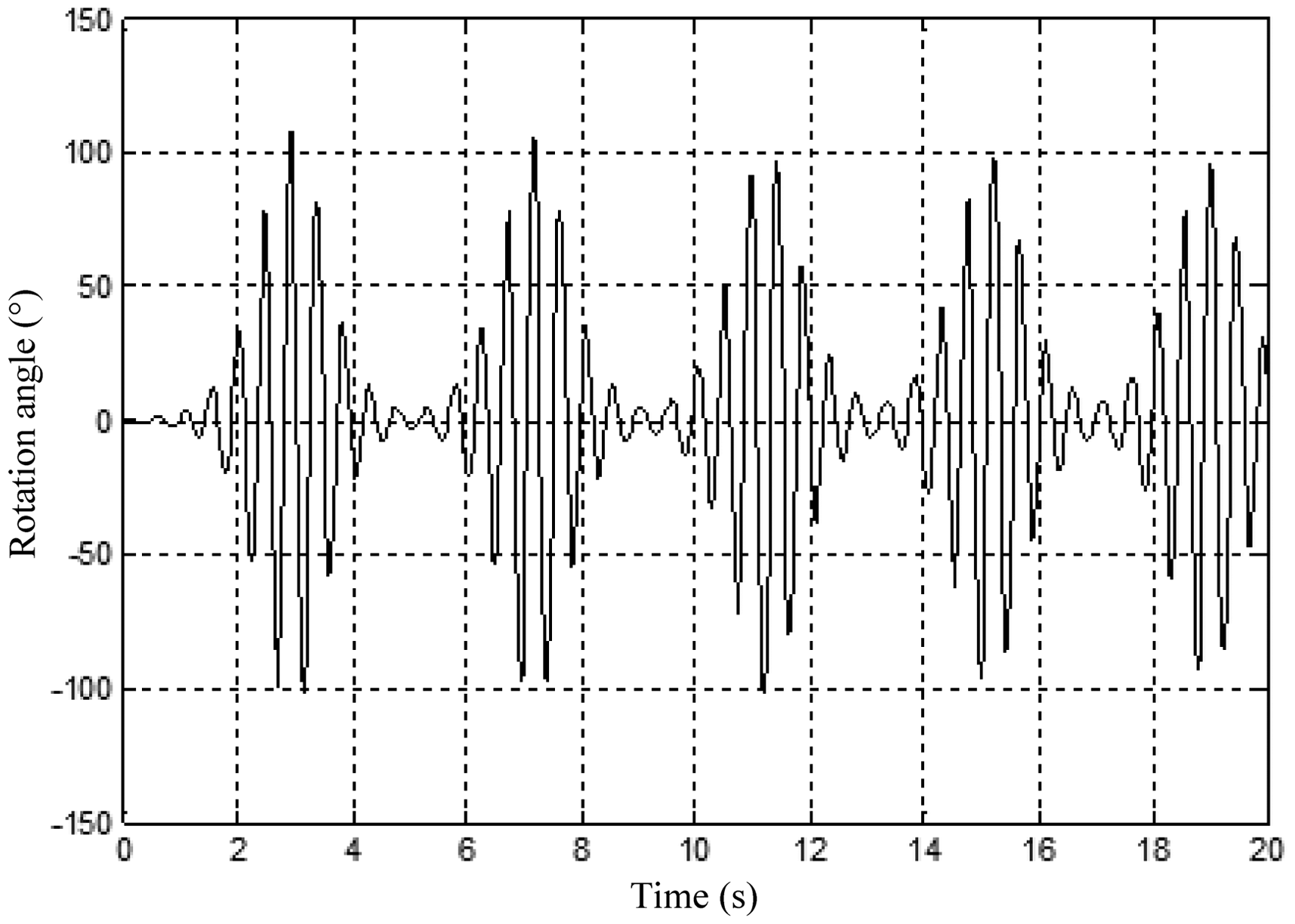
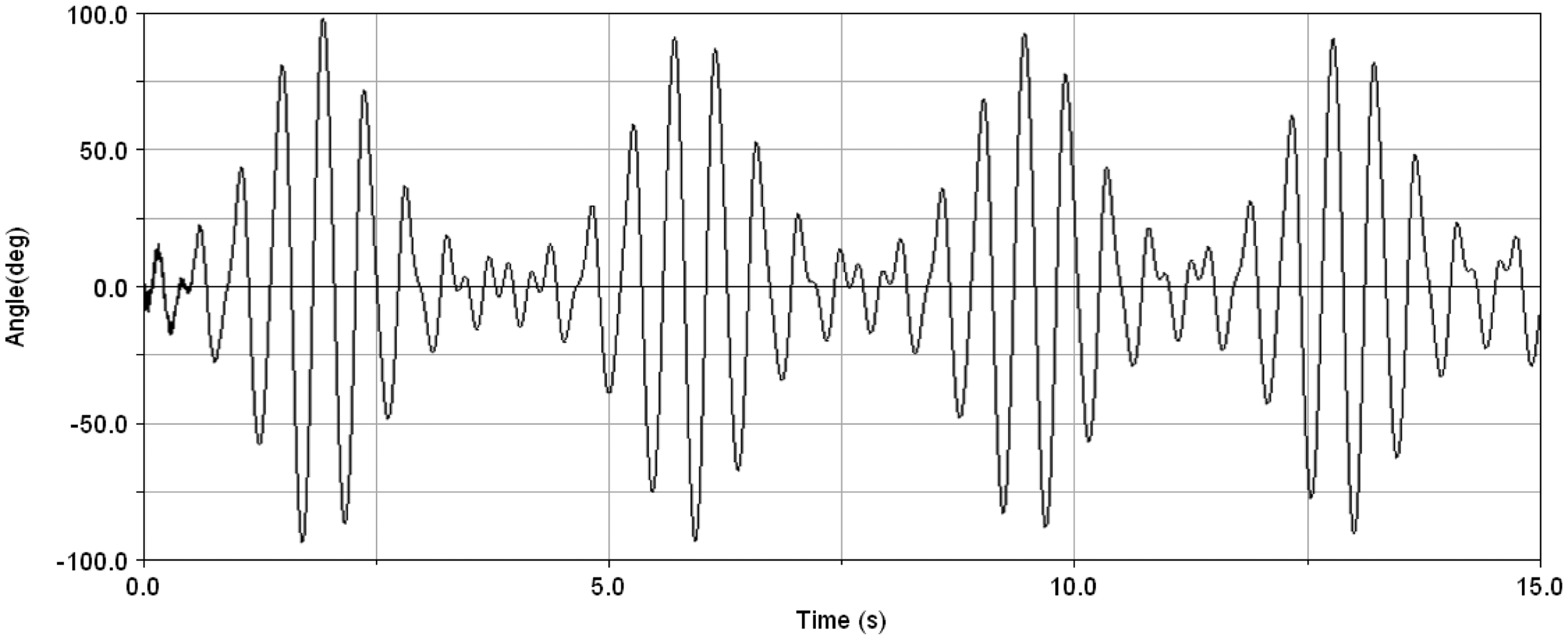
To control the vibration of the flexible manipulator, the vibration absorber is attached to the flexible manipulator. The fundamental frequency of the flexible manipulator is 4.34 Hz and the frequency of the vibration absorber is tuned to 2.17 Hz. In the absence of damping, i.e.
Undamped response of the flexible manipulator. Undamped response of the vibration absorber.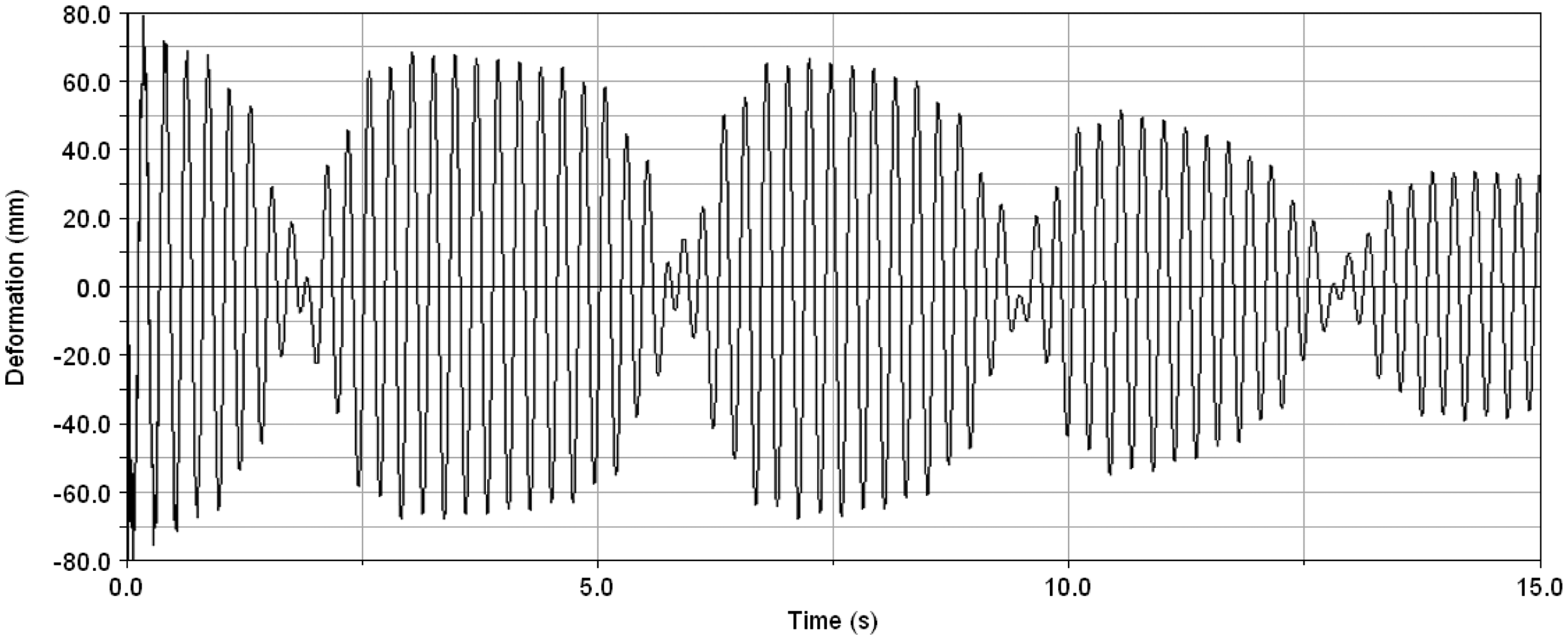
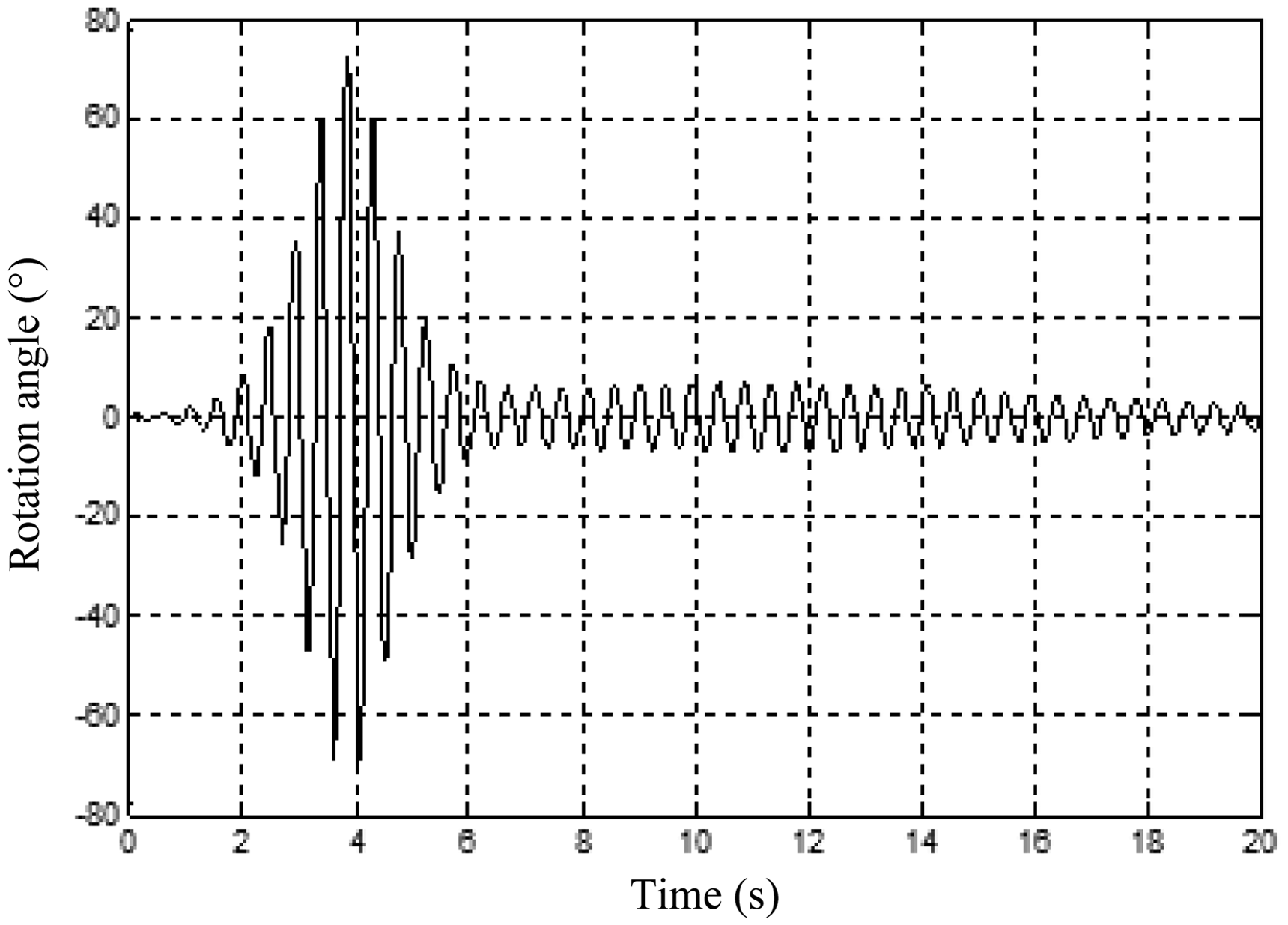
When the damping of the vibration absorber is taken into account, letting
End-effector deformation under damping.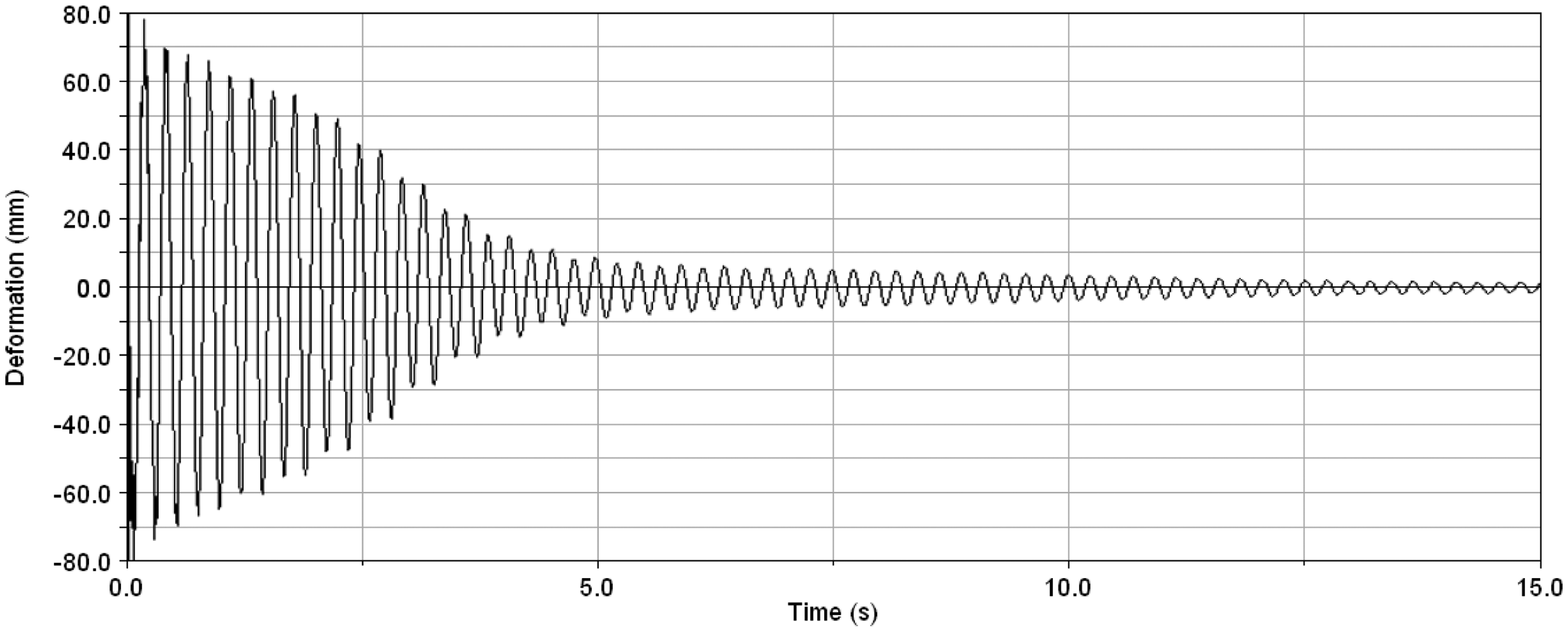
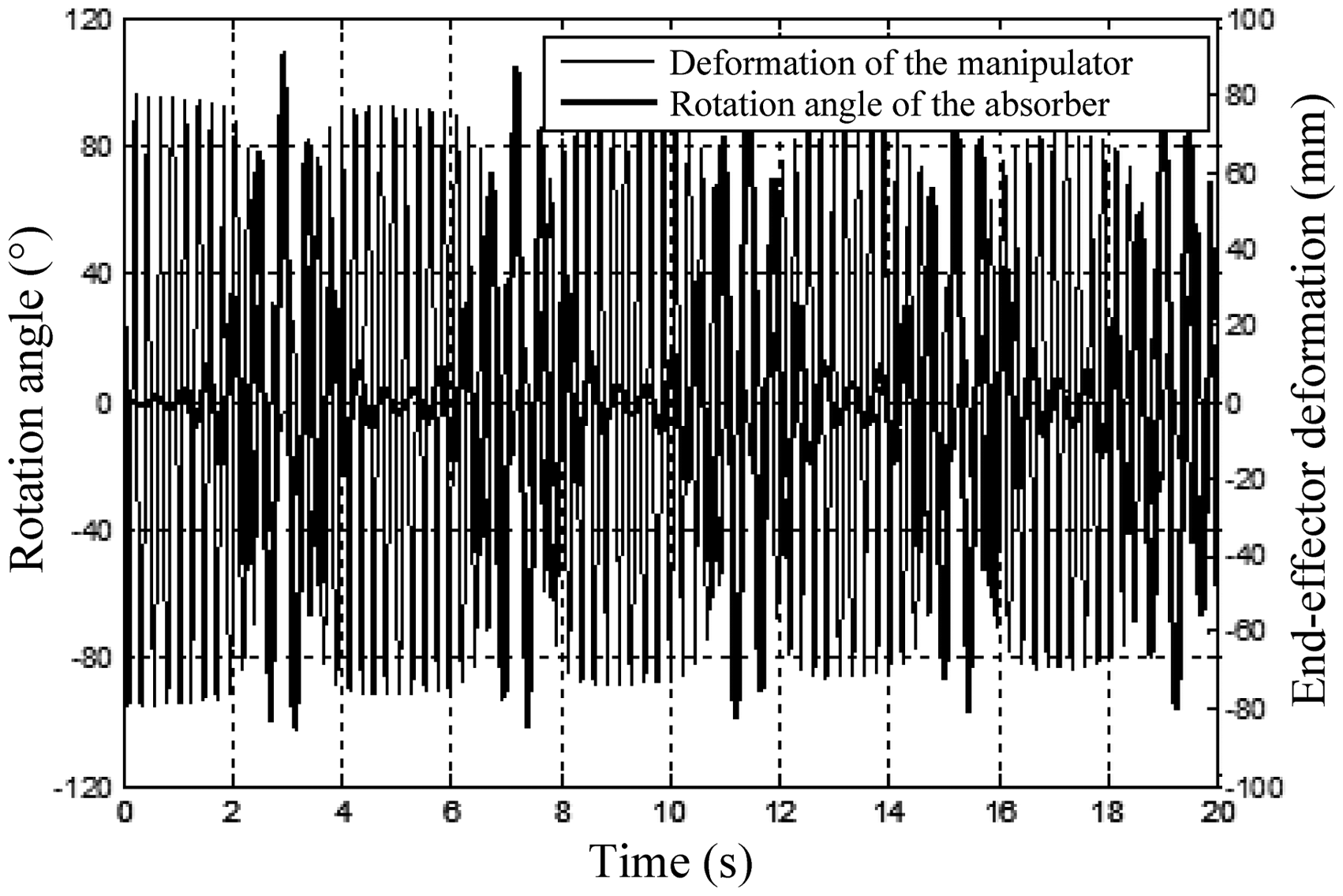
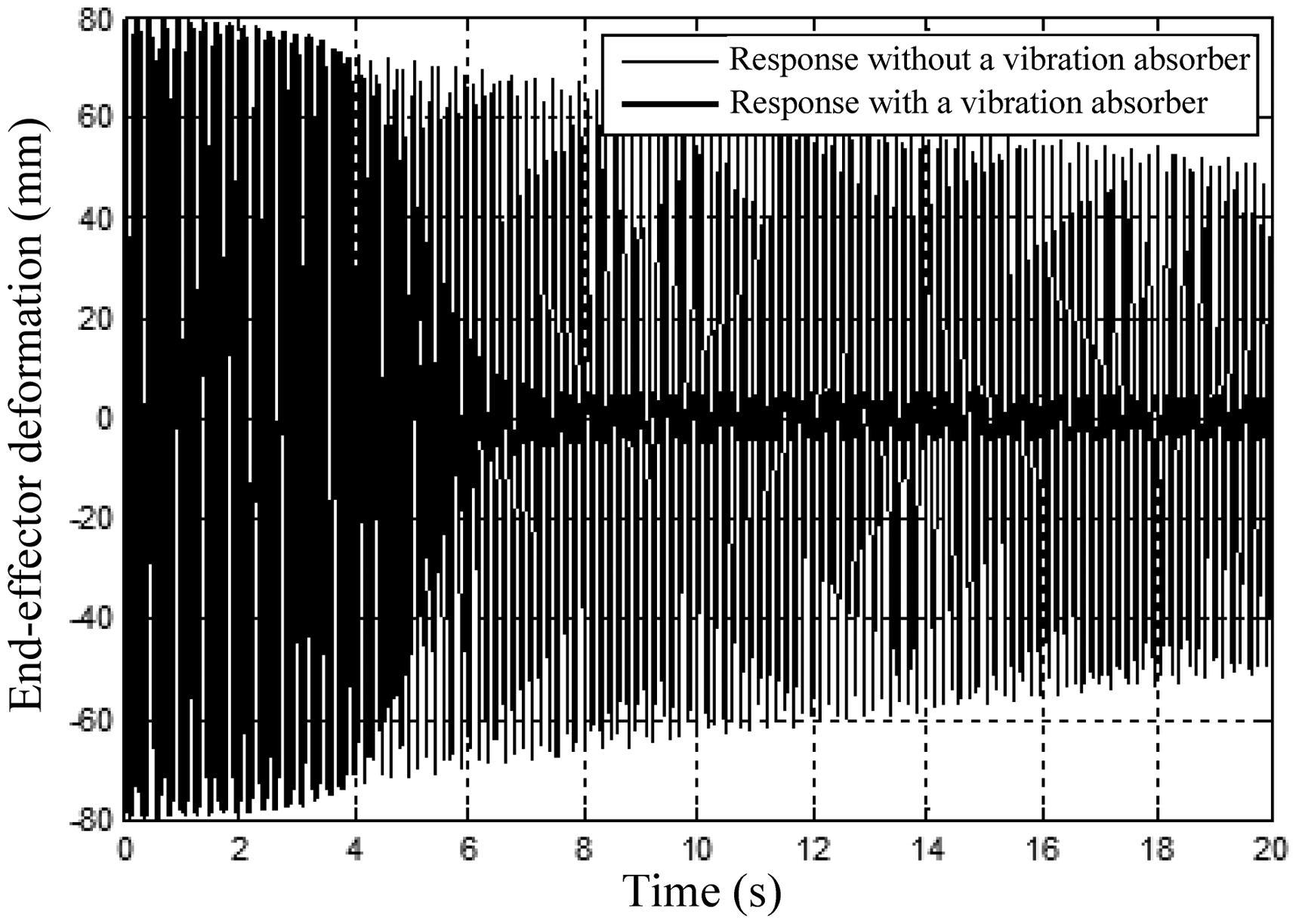
For the convenience of comparison, the end-effector deformation without the vibration absorber (as shown in Figure 11) and that with the desired damping (as shown in Figure 14) are incorporated into Figure 15. It can be seen that the flexible manipulator’s end-effector deformation has been effectively reduced based on internal resonance.
Comparison of vibration responses with and without an absorber.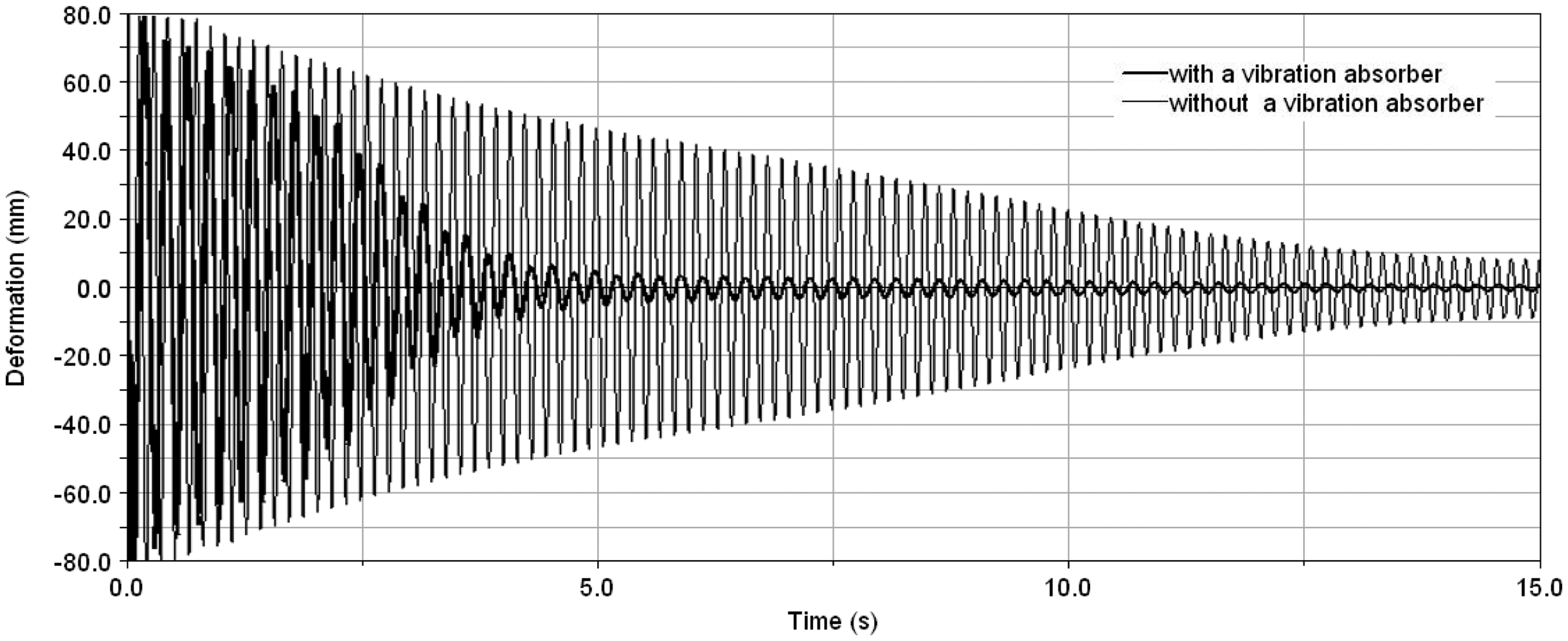
Through the virtual prototyping simulations above, it is demonstrated that the proposed method is effective in controlling nonlinear vibration of the flexible manipulator undergoing rigid motion.
7. Experimental investigation
In this section, experimental investigations are conducted to examine the feasibility of the proposed method.
7.1. Experimental setup
An experimental setup was designed and developed as shown in Figures 16 and 17, including the manipulator, the actuator components, the detection devices, the vibration absorber, and the control system.
Scheme of the experimental setup. Photograph of the experimental setup.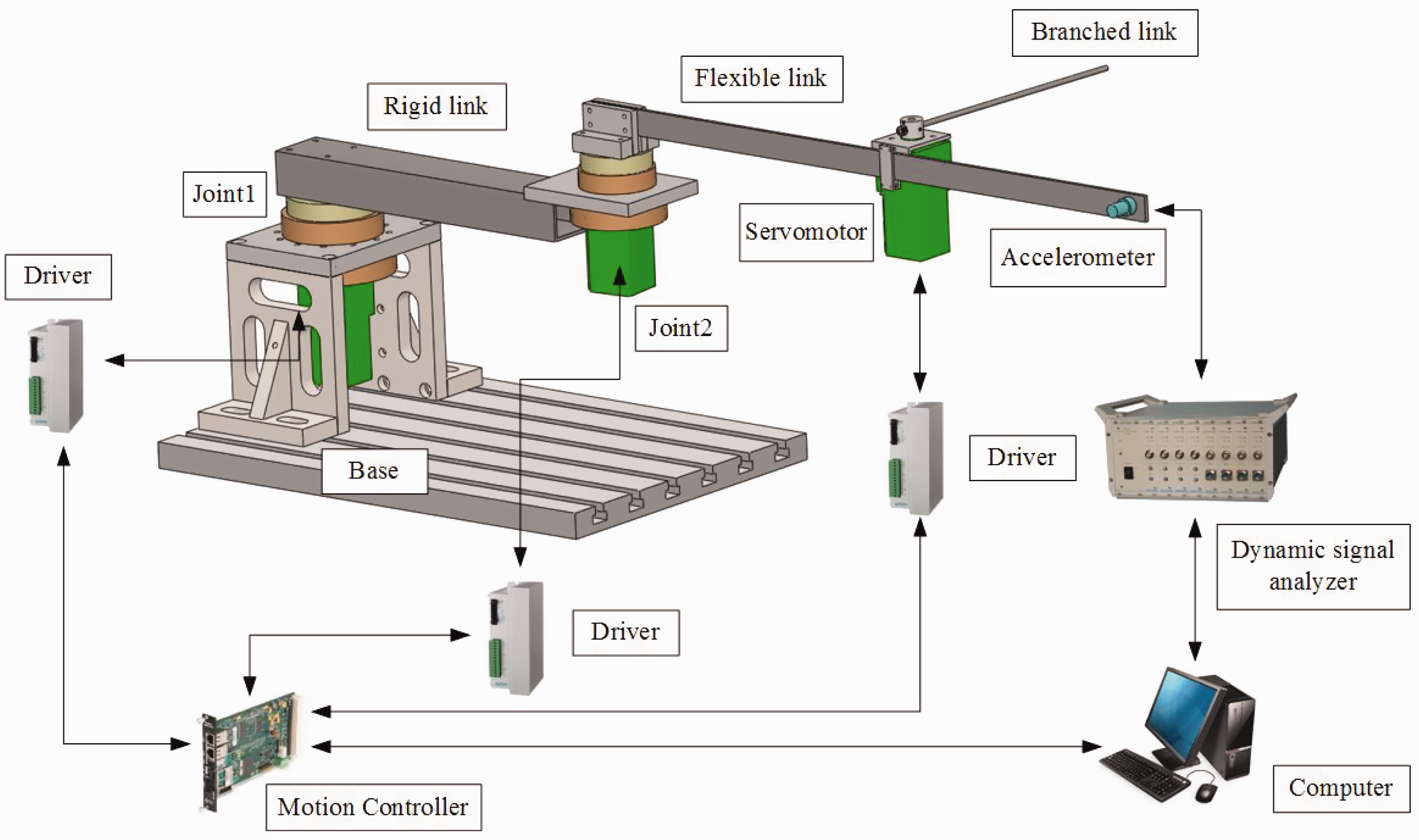
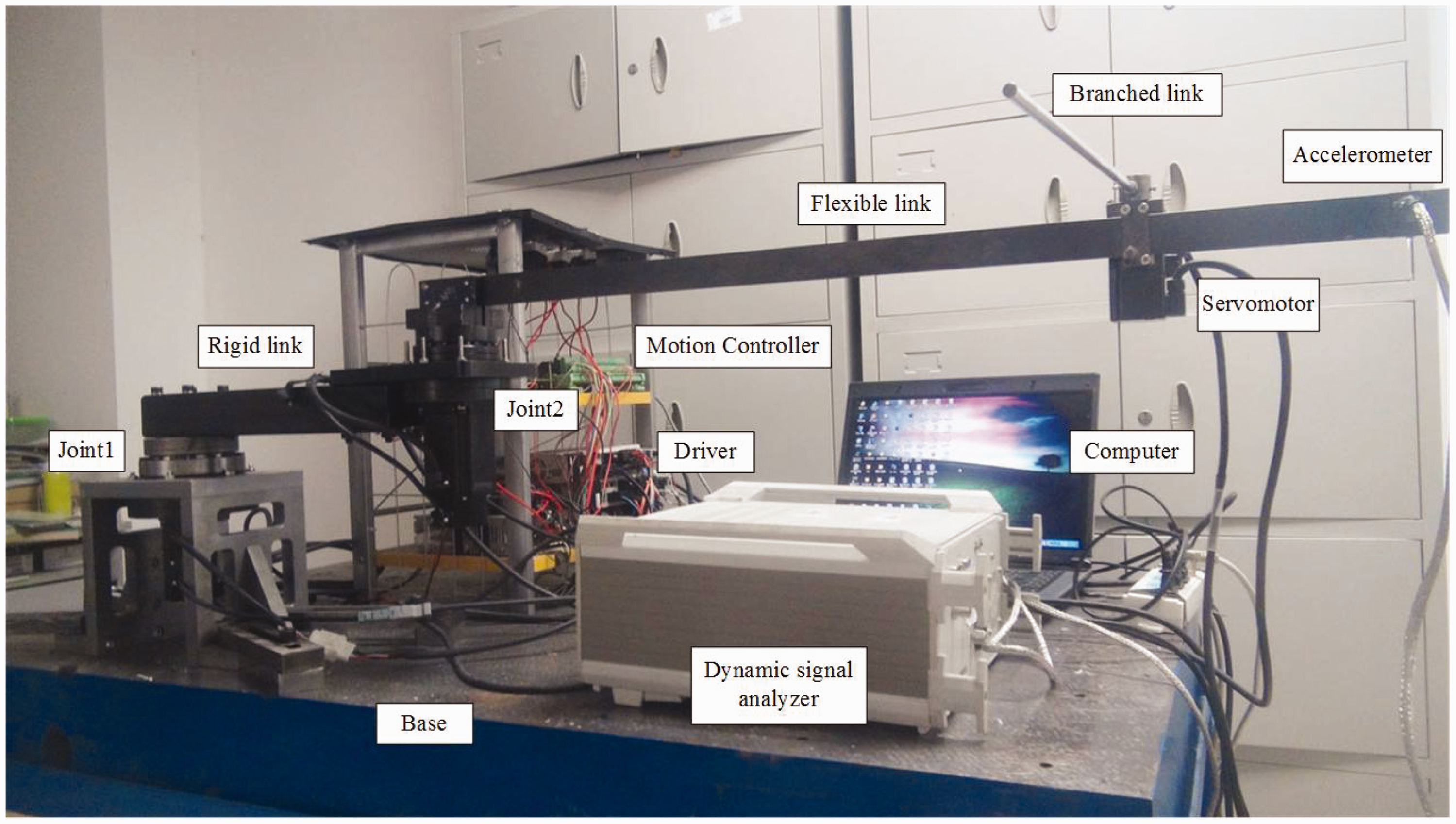
The manipulator consists of two links: one is rigid and the other is flexible. These links possess the same parameters as those in the virtual prototyping simulations. Each joint is composed of a motor, a reducer, and a flange, as shown in Figure 18. To enhance the stiffness of the experimental setup, joint 1 is installed on the high stiffness support and the support is fixed on the cast-iron platform. The accelerometer is stuck to the end-effector of the flexible link and used to measure the acceleration signals. The dynamic signal analyzer is used to collect and process the acceleration signals, then transfer them to the computer.
Photograph of the joints and supports.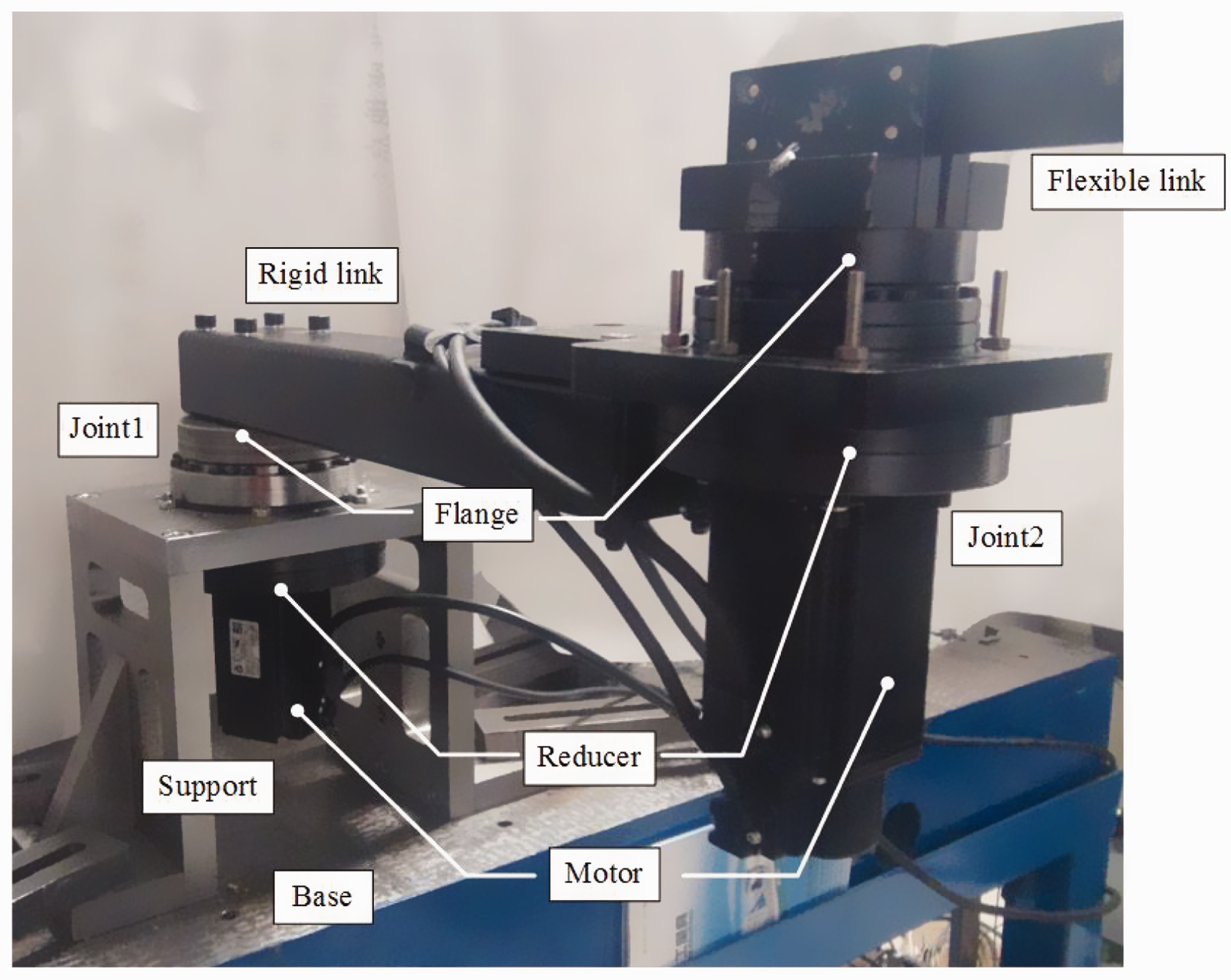
7.2. Experimental investigation
7.2.1. Measuring vibration responses
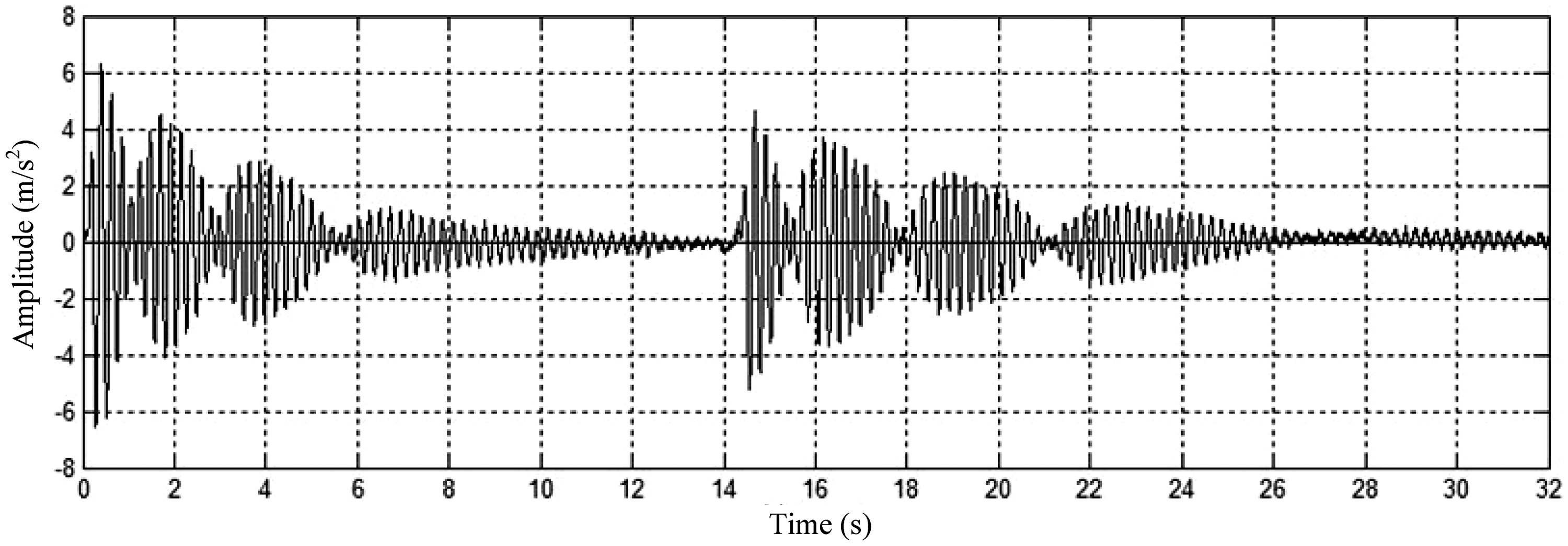
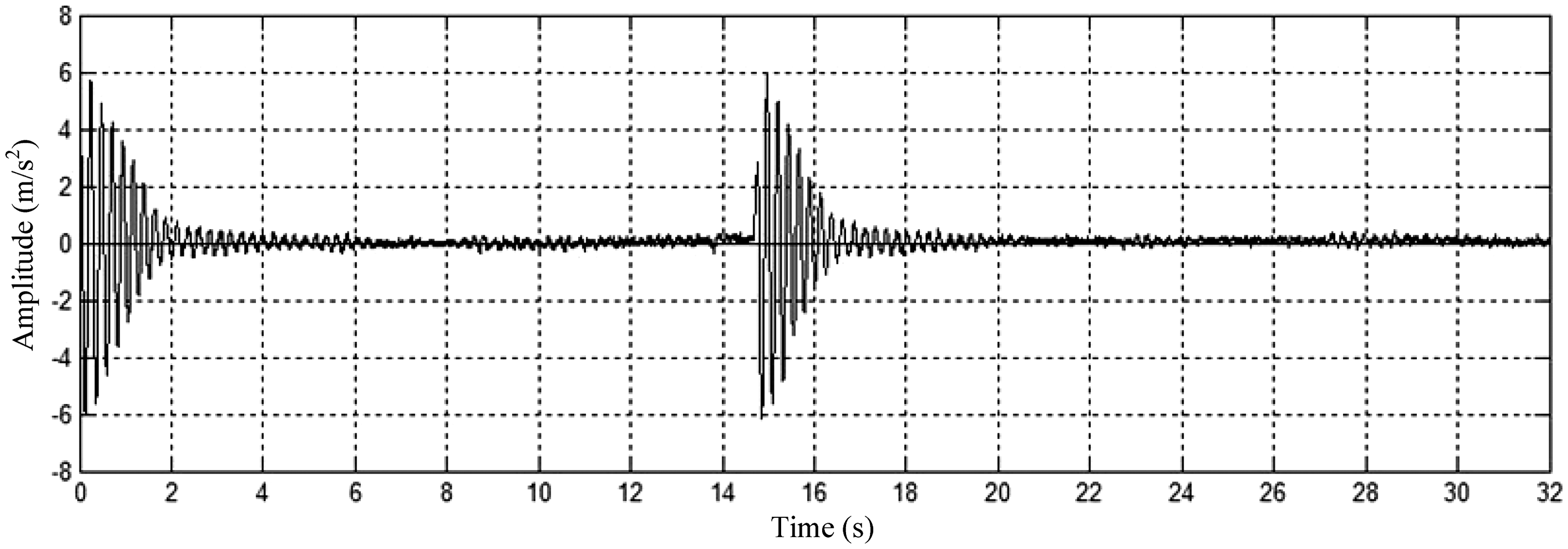
In the absence of the vibration absorber, the vibration responses of the flexible manipulator undergoing rigid motions were measured. Two disturbances are exerted on the end-effector of the flexible manipulator at about t = 0 s and 14 s during motion. The acceleration signals of the end-effector are detected by the accelerometer and processed by the dynamic signal analyzer, as shown in Figure 19. Due to the small amount of structural damping in the flexible link, the vibration responses of the end-effector decrease very slowly. After each disturbance, it takes about 10 s to decrease to 20% of the initial amplitude.
Responses of the end-effector without the vibration absorber.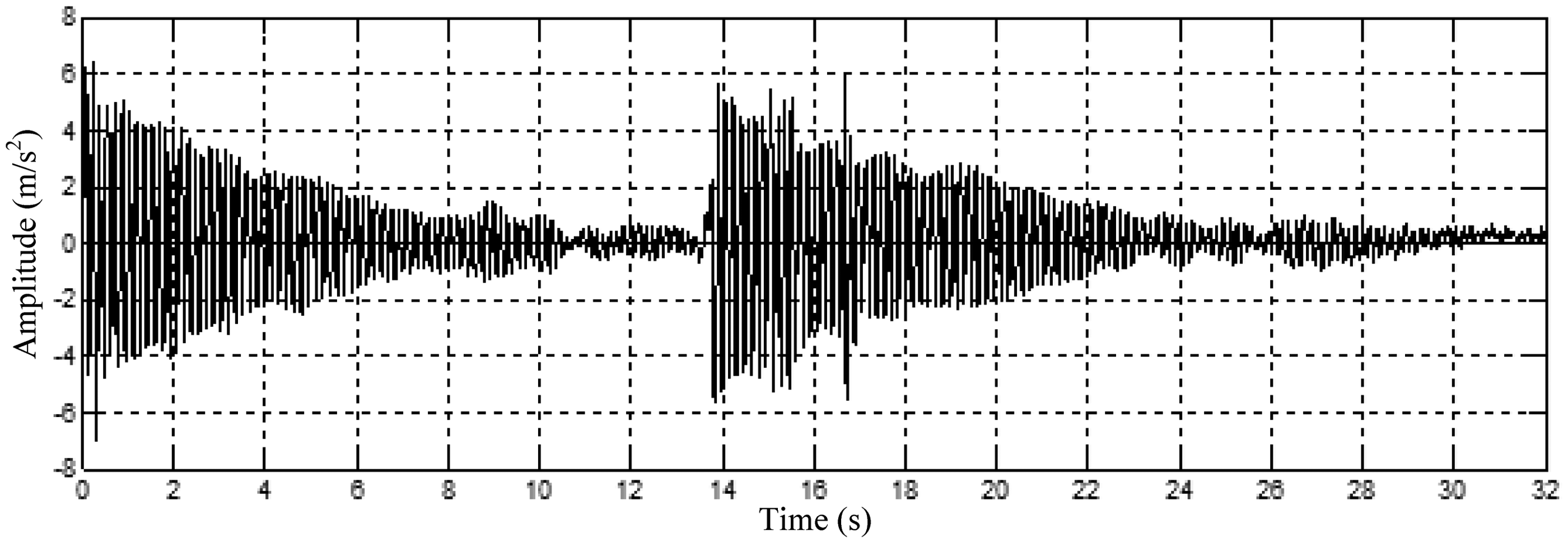
7.2.2. Verifying 2:1 internal resonance
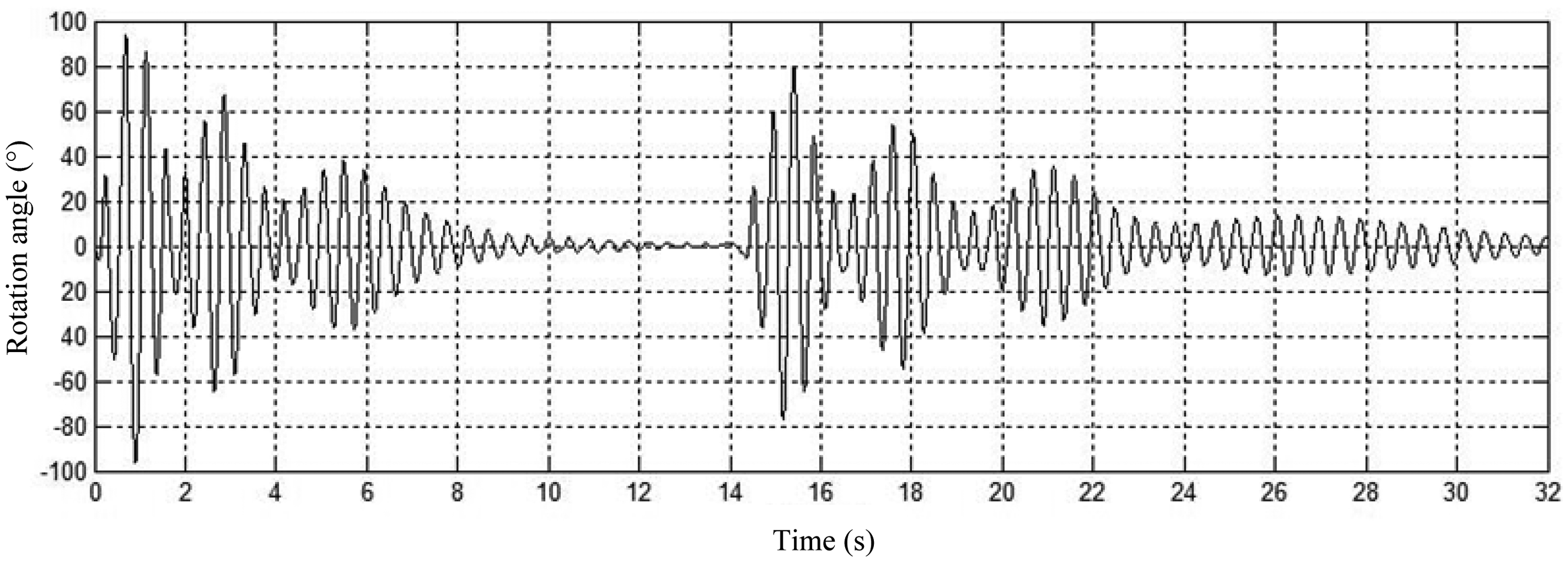
To establish internal resonance, a vibration absorber based on a servomotor was attached to the flexible link. The fundamental frequency of the flexible manipulator was measured to be 4.55 Hz via fast Fourier transformation. Using the tuning module of the PMAC controller (Delta Tau Data System Corporation, Chatsworth, CA, USA), when
Undamped responses of the flexible manipulator (
Undamped responses of the vibration absorber (
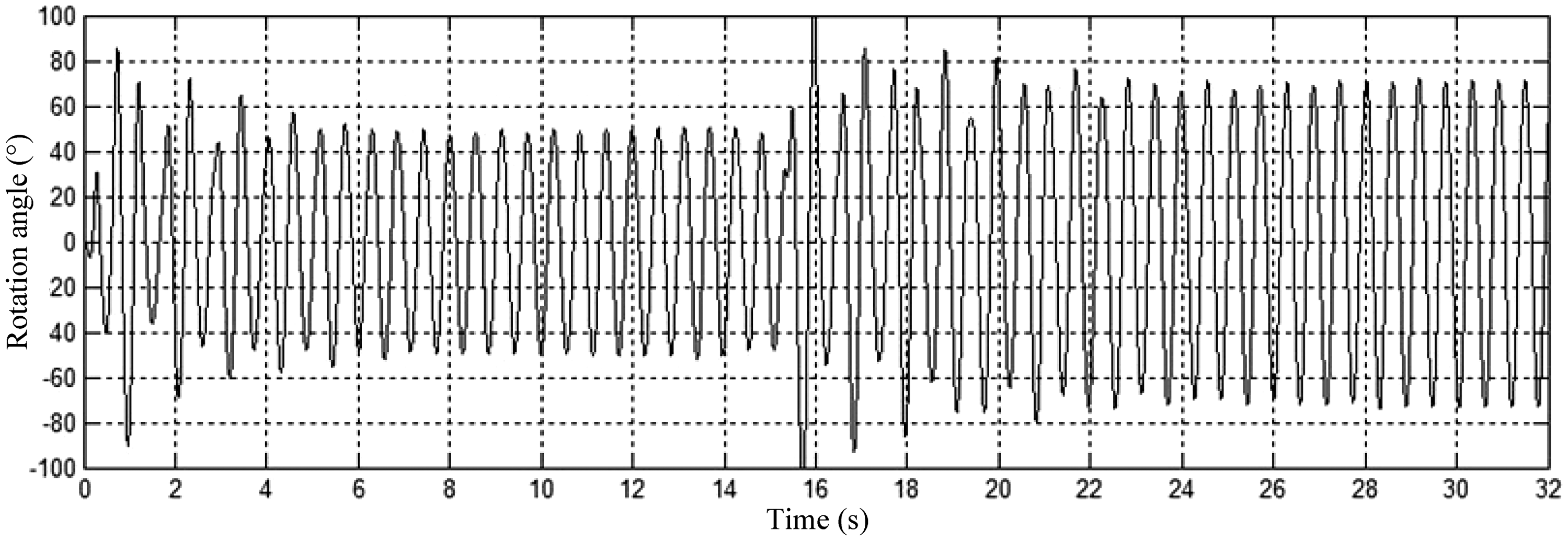
When
Undamped response of the flexible manipulator (
Undamped response of the vibration absorber (
7.2.3. Vibration control effect
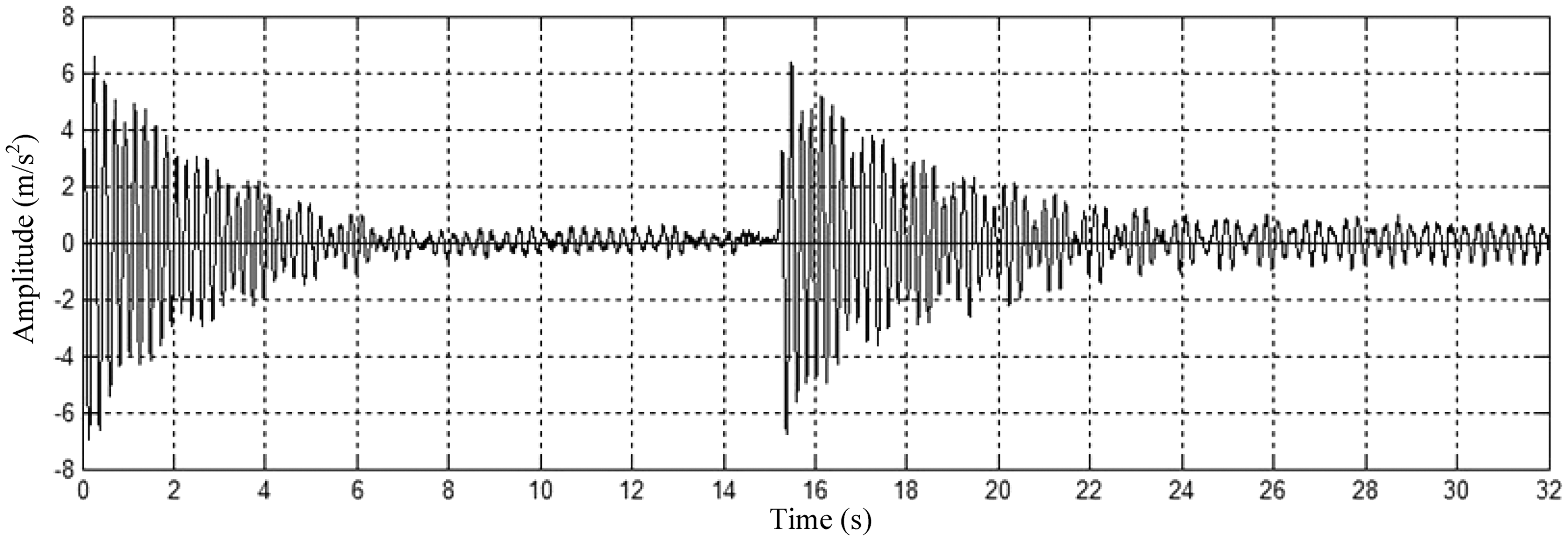
When damping of the vibration absorber is taken into account for a 2:1 internal resonance condition, i.e.
Damped response of the flexible manipulator (
To compare the control effect, the vibration responses of the end-effector with and without the vibration absorber are shown in Figure 25. Take the first disturbance at t = 0 s as an example. In the absence of the vibration absorber, it takes about 2.4 s to decrease the end-effector vibration responses by 60% and about 10 s to decrease the end-effector vibration responses by 90%. In the presence of the vibration absorber with
Comparison of vibration responses.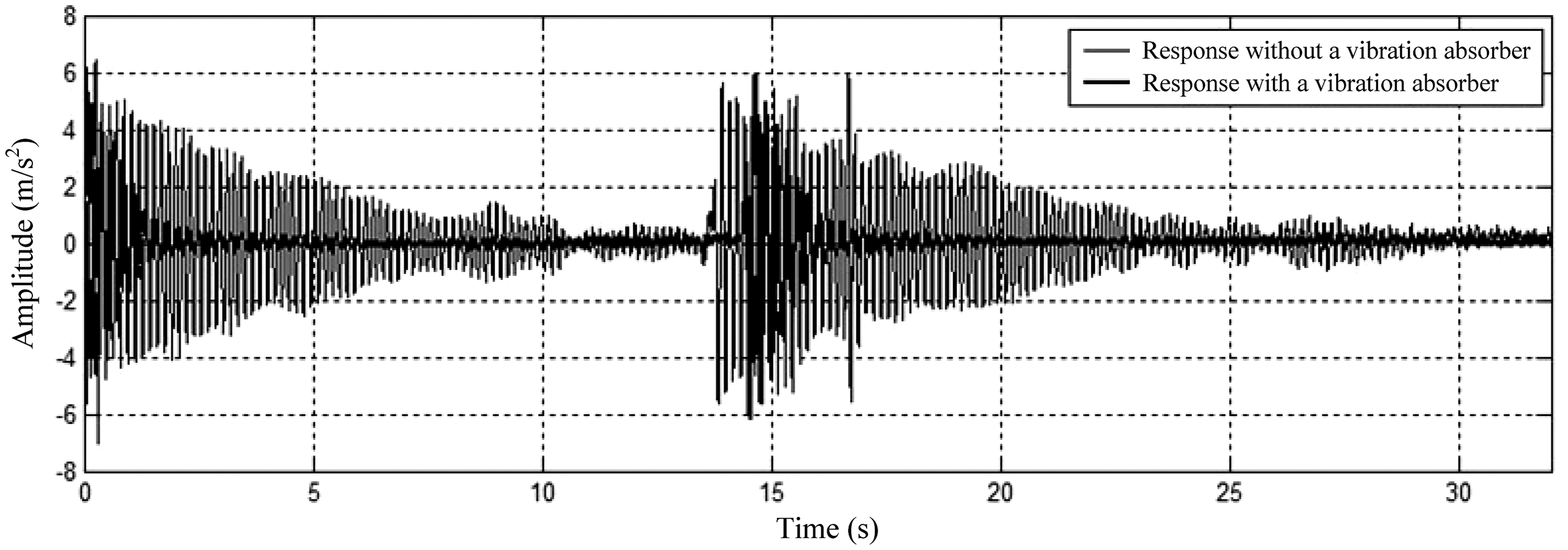
From the above experiments, it is verified that the proposed control method is feasible and effective in reducing nonlinear vibration of the flexible manipulator.
8. Conclusions
To attenuate nonlinear vibration of the flexible manipulator, a vibration control method based on internal resonance is proposed. A vibration absorber is designed based on a servomotor and used to establish the internal resonance relationship with the flexible manipulator. To satisfy the 2:1 internal resonance conditions, the frequency of the vibration absorber should be tuned to half the fundamental frequency of the flexible manipulator. By means of perturbation analysis, it is proven that internal resonance can be successfully established for a flexible manipulator undergoing rigid motion. At the internal resonance state, the vibration energy can be exchanged between the flexible manipulator and vibration absorber. In the presence of damping, the vibration energy of the flexible manipulator can be transferred to and dissipated by the vibration absorber via internal resonance. Through numerical simulations and experimental investigation, it is verified that the proposed method is effective for the control of nonlinear vibration of the flexible manipulator. Future work will focus on adaptive adjustment of the frequency and damping of the vibration absorber.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by National Natural Science Foundation of China (grant number 51675017) and Pre-Research Foundation of GEH PLA (grant number 9140A34030315KG18081).