This paper studies the stability and the stabilization for a class of uncertain fractional order (FO) systems subject to input saturation. The Lipschitz condition and the Gronwall–Bellman lemma are adopted and sufficient conditions are derived to stabilize systems by designing a state feedback controller. Numerical examples demonstrate the effectiveness of the proposed method.
Fractional calculus and its applications in different fields of science and engineering have received considerable attention during the last two decades (Faieghi et al., 2014; Feng et al., 2015; Ionescu et al., 2015; Jiang and Tian, 2015; Jakovljević et al., 2016; Lopes and Tenreiro Machado, 2016; Tenreiro Machado, 2016). The dynamic models that contain fractional derivatives and integrals are referred to as fractional order (FO) systems. The key attribute of FO differential equations in the study of dynamics is to embed long-range memory effects in the system modeling (Baleanu et al., 2011). Similarly to integer systems, stability analysis is a significant topic in the control of FO systems.
The stability problem of FO linear time-invariant (FO-LTI) systems with interval uncertainties has been extensively addressed in recent years (Petrás et al., 2004; Chen et al., 2006; Ahn et al., 2007; Deng et al., 2007; Qian et al., 2010; Rivero et al., 2013). In Petrás et al. (2004), the stability of uncertain FO systems with interval coefficients in the state-space representation was studied to find the range of the interval eigenvalues using matrix perturbation theory. In Chen et al. (2006), the Lyapunov inequality was adopted for interval uncertain FO-LTI systems with the FO, v, so that , to reduce the conservatism of the robust stability test. In Xing and Lu (2009), the robust stability and the stabilization of uncertain linear FO systems with order lying in the range was addressed via linear matrix inequality (LMI). In Sabatier et al. (2013), bounded input–bounded output stability analysis was derived for incommensurate linear FO systems. In Lu and Chen (2010), sufficient conditions for robust stability and stabilization of the linear FO interval systems with were investigated.
Control input saturation is a significant topic in physical control systems since real actuators cannot provide unlimited energy. Controllers that ignore the actuator saturation may cause undesirable responses and even closed-loop instability. Due to this reason, it is important to develop methods that take into account actuator saturation at the control design procedure, which makes it more difficult. In studies by Lim et al. (2013), Alaviyan Shahri et al. (2015), and Alaviyan Shahri and Balochian (2015a, 2016), the stability conditions of such systems were provided using the state feedback controller. However, the model uncertainty has not been taken into account in the controller design. The key motivations for the current work come from several sources, namely from uncertainty in the parameters and the control action under actuator saturation. Large values of the control inputs are not satisfactory, particularly in the presence of saturation. This imposes significant restrictions in real-world applications. Therefore, the robust controller design of uncertain FO-LTI systems subject to saturation remains to be investigated. The main contribution of this paper is to address the robust stability analysis and stabilization of uncertain FO-LTI systems subject to input saturation. The Lipschitz condition and the Gronwall–Bellman lemma are applied to obtain an explicit bound to an unknown function as a powerful tool in the study of quantitative properties and stability of solutions of FO equations (N’Doye et al., 2011; Lim and Ahn, 2012). Sufficient conditions are also derived to stabilize such systems by designing a state feedback controller.
This paper is organized as follows. The fundamental concepts are described in Section 2. The main results are developed and discussed in Section 3. Simulation results are represented in Section 4. Finally, the main conclusions are given in Section 5.
Notation: denotes the Mittag–Leffler function with one parameter, is real part of complex number of z, stands the spectrum of a matrix A, and are respectively the Euclidean vector and the spectral matrix norms, where represents the maximal eigenvalue of the symmetric matrix and is for the kth eigenvalue of A.
(Sabatier et al., 2007) The Caputo derivative of order of a continuous function is defined as follows
where is the Gamma function, is nth the derivative of function , and .
Definition 2
(Jiang and Tian, 2015) The Mittag–Leffler function with two parameters is expressed as
where .
If , the Mittag–Leffler function with one parameter is obtained.
Remark 1
(Lim and Ahn, 2012): From Definition 2, the Mittag–Leffler function can be stated as follows
The norm of the Mittag–Leffler function is bounded and given by
(N’Doye et al., 2011; the Gronwall–Bellman lemma) Assume that and f(t) are real-valued piecewise-continuous functions defined on the real interval , H(t) is real-valued and and H(t) are nonnegative on this interval. If for all
Consider the uncertain FO-LTI system subject to input saturation
where A and B are known constant real-value matrices and δA and δB denote the uncertainties satisfying and . Applying the state feedback controller defined as , the entire closed-loop system is given by
Theorem 1
Consider the closed-loop system given by equation (11). If exists K such that , then the closed-loop system is robustly asymptotically stable.
Proof
Using the Laplace transfer function on equation (11), we obtain
where .
By taking the Laplace inverse transform for equation (12), we have
Using the norm operator on both sides of equation (13) yields
In the sequel of the proof, we need to establish a bounded value for . Using the triangular inequality and the specification of δA and δB, i.e. and , we obtain
where is the Lipschitz constant of the saturation function. For simplification, let us define , which is a constant matrix. Then, equation (15) can be written as
To guarantee the system stability, assume that Ac satisfies the stability condition, i.e. . Now, we want to demonstrate that as . Assume that . Then, from equation (3) and knowing that , the above inequality can be written as
where and . Multiplying both sides of equation (18) by ect yields
Using Corollary 1, i.e. , and
we have
By solving the above integral, we obtain the following inequality
Multiplying both sides of the above inequality by , the following result is obtained
Based on the results given in Lim and Ahn (2012), if time tends to infinity, then converges to zero, i.e. , which implies the robust stability of the closed-loop system. This completes the proof.
Corollary 2
Assume that in the closed-loop system given by equation (11). If K exists such that , then the closed-loop system is robustly asymptotically stable.
Proof
The proof is similar to that of Theorem 1 by considering .
Corollary 3
Suppose that in the closed-loop system given by equation (11). If K exists such that , then the closed-loop system is robustly asymptotically stable.
Proof
The proof is similar to that of Theorem 1 by considering .
Remark 4
Many systems involve nonlinear relationships between the variables. In order to apply the linear control theory, it is required to linearize the equations of the system around an equilibrium point. Therefore, there is a mismatch between the real and nominal models. In the following, we develop the control method for a class of uncertain nonlinear FO systems. In this point of view, the system model can be described by the sum of the two terms, namely a linear term and a nonlinear term, as follows
where
In equation (24), is the Lipschitz constant of the nonlinear term. The following theorem can be applied to check the robust stability of the closed-loop systems given in equation (23).
Theorem 2
Consider the system described by equation (23) using the state feedback controller . The overall closed-loop system is robustly asymptotically stable if .
Proof
The entire closed-loop system with the feedback control can be expressed as
Using the Laplace transform on equation (25), we have
If the Laplace inverse is taken, then we obtain
Applying the norm operator on both sides of the above equation, it can be concluded that
Using the triangular inequality and the Lipschitz condition of saturation function given in equations (24) and (5), respectively, we obtain
In the sequel of the proof, we need to establish a bounded value for , i.e.
For simplification, let us define , which is a constant matrix. Then, equation (30) can be written as
The rest of the proof is the same as for Theorem 1. From the results reported in Lim and Ahn (2012), it can be deduced that if time t tends to infinity, then converges to zero. In other words, , which implies the robust stability of the closed-loop system. This completes the proof.
4. Simulations
In this section, the performance of the proposed control method is investigated by means of two examples. It is worth mentioning that since this is the first research work regarding the design of a robust controller for uncertain FO systems under input saturation, there are no related works reported in the literature for comparison.
4.1. Example 1
Consider the mechanical system composed of an oscillator with both classical fluid damping of order one and fractional damping of order one-half as follows (Alaviyan Shahri and Balochian, 2014)
In this example, the behavior of the system is studied in the presence of uncertainties based on Theorem 1, where the stability condition, i.e. , must be held. With and state vector , the dimension of the system is . The resulting state-space representation is
In order to consider the uncertainties, we assume that
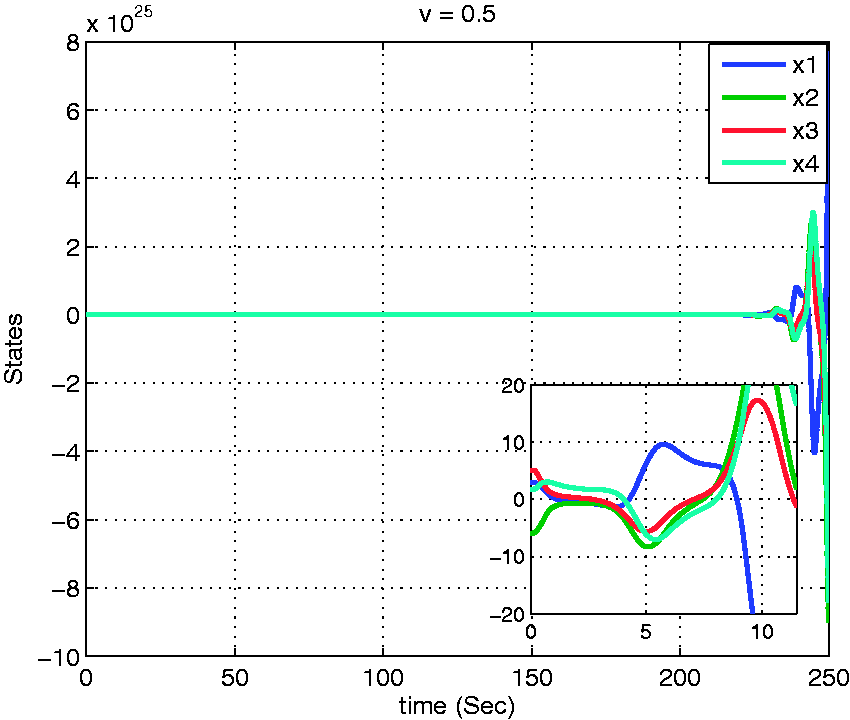
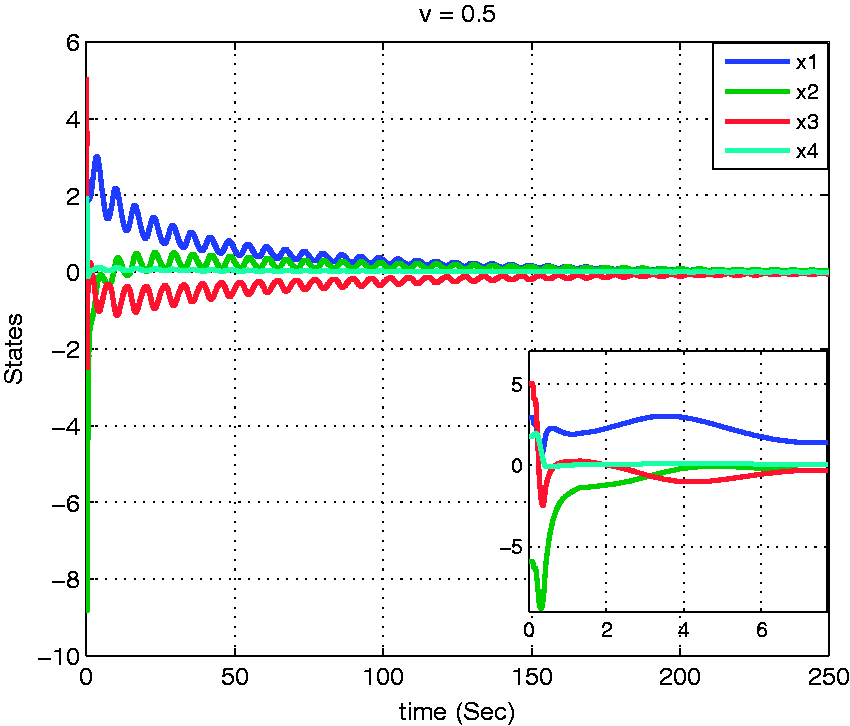
With , and , the open-loop system is unstable. To stabilize the system, we consider the gain of the state feedback controller as . The time responses of the open-loop and closed-loop system are shown in Figures 1 and 2, respectively.
Trajectory of the open-loop system, .
Trajectory of the closed-loop system, .
4.2. Example 2
Consider the parameters of the deterministic linear system adopted from Lim et al. (2013) as
The open-loop system is unstable. We consider the state feedback controller as , while . It can be seen that the stability condition, i.e. , is satisfied. We assume that and the uncertainties into matrices A and B as
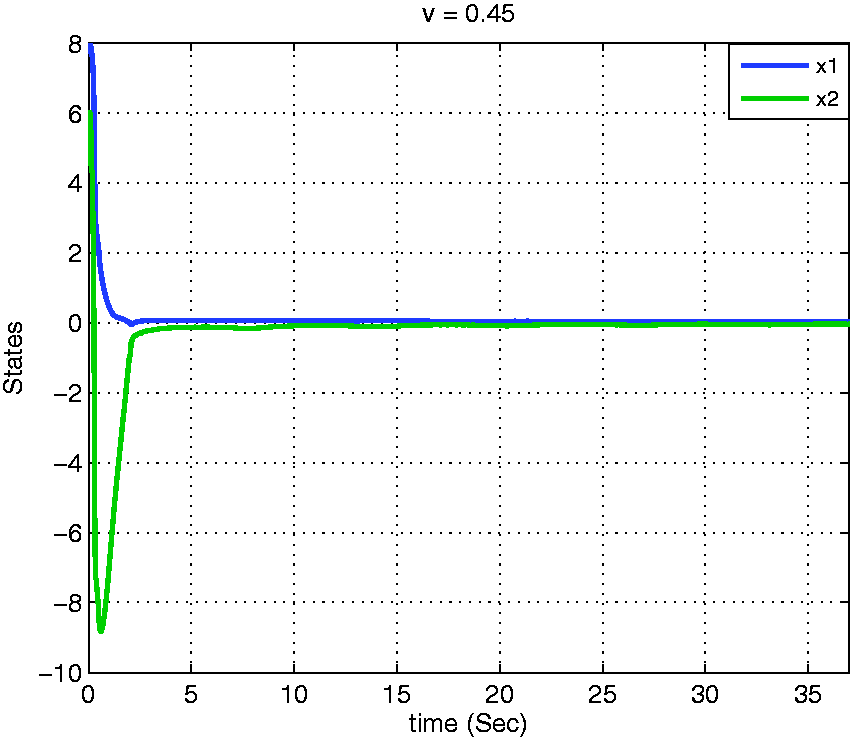
and the Lipschitz nonlinear is where . The behavior of the closed-loop system is depicted in Figure 3.
Trajectory of the close-loop system, .
5. Conclusion
In this paper we have investigated the robust stability and the stabilization for a class of uncertain FO systems with order lying in (0,1) under input saturation. Using the Lipschitz condition and the Gronwall–Bellman lemma, the sufficient condition for designing a state feedback controller to stabilize such a type of systems was derived. Numerical examples demonstrated the validity of the proposed approach.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
1.
AhnHChenYQPodlubnyI (2007) Robust stability test of a class of linear time-invariant interval fractional order system using Lyapunov inequality. Applied Mathematics and Computation187(1): 27–34.
2.
Alaviyan ShahriESBalochianS (2014) Stability region for fractional-order linear system with saturating control. Journal of Control, Automation and Electrical Systems25(3): 283–290.
3.
Alaviyan ShahriESBalochianS (2015a) A stability analysis on fractional order linear system with nonlinear saturated disturbance. National Academy Science Letters38(5): 409–413.
4.
Alaviyan ShahriESBalochianS (2015b) Analysis of fractional-order linear systems with saturation using Lyapunov’s second method and convex optimization. International Journal of Automation and Computing12(4): 440–447.
5.
Alaviyan ShahriESBalochianS (2016) An analysis and design method for fractional-order linear systems subject to actuator saturation and disturbance. Optimal Control Applications and Methods37(2): 305–322.
6.
Alaviyan ShahriESAlfiATenreiro MachadoJA (2015) An extension of estimation of domain of attraction for fractional order linear system subject to saturation control. Applied Mathematics Letters47: 26–34.
ChenYQAhnHPodlubnyI (2006) Robust stability check of fractional order linear time invariant systems. Signal Processing86: 2611–2618.
9.
DasS (2011) Fractional Function Calculus, Berlin: Springer-Verlag.
10.
DengWHLiCPLuJH (2007) Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dynamics48: 409–416.
11.
FaieghiMRKuntanapreedaSDelavariHet al. (2014) Robust stabilization of fractional-order chaotic systems with linear controllers: LMI-based sufficient conditions. Journal of Vibration and Control20(7): 1042–1051.
12.
FengMKWangXYWeiQ (2015) Adaptive robust synchronization of fractional-order chaotic system with disturbance. Journal of Vibration and Control21(11): 2259–2265.
13.
IonescuCZhouYTenreiro MachadoJA (2016) Special issue: advances in fractional dynamics and control. Journal of Vibration and Control22(8): 1969–1971.
14.
JakovljevićBPisanoARapaićMRet al. (2016) On the sliding-mode control of fractional-order nonlinear uncertain dynamics. International Journal of Robust and Nonlinear Control26(4): 782–798.
15.
JiangWTianT (2015) Numerical solution of nonlinear Volterra integro-differential equations of fractional order by the reproducing kernel method. Applied Mathematical Modelling39(16): 4871–4876.
16.
Lim YH and Ahn H (2012) Utilization of Gronwall–Bellman lemma in fractional order systems. Report, Distributed Control and Autonomous Systems Laboratory, Gwangju Institute of Science and Technology, China.
17.
LimYHOhKKAhnHS (2013) Stability and stabilization of fractional-order linear systems subject to input saturation. IEEE Transactions on Automatic Control58(4): 1062–1067.
18.
Lopes AM and Tenreiro Machado JA (2016) Dynamics of the N-link pendulum: a fractional perspective. International Journal of Control: 1–9.
19.
LuJChenYQ (2010) Robust stability and stabilization of fractional-order interval systems with the fractional order α: the case. IEEE Transactions on Automatic Control55: 152–158.
20.
MonjeAChenYQVinagreBMet al. (2010) Fractional-Order Systems and Controls Fundamentals and Applications, London: Springer Verlag.
21.
N’DoyeIZasadzinskiMDarouachMet al. (2011) Exponential stabilization of a class of nonlinear systems: a generalized Bellman–Gronwall lemma approach. Nonlinear Analysis: Theory, Methods and Applications74: 7333–7341.
22.
Petrás I, Chen YQ, Vinagre B, et al. (2004) Stability of linear time invariant systems with interval fractional orders and interval coefficients. In: 2nd IEEE international conference on computational cybernetics (ICCC 2004), Vienna, 30 August–1 September 2004, pp.341–346. IEEE.
23.
QianDLiCAgarwalRPet al. (2010) Stability analysis of fractional differential system with Riemann–Liouville derivative. Mathematical and Computer Modelling52: 862–874.
24.
RiveroMRogosinSVTenreiro MachadoJAet al. (2013) Stability of fractional order systems. Mathematical Problems in Engineering2013: 356215.
25.
SabatierJAgrawalOPTenreiro MachadoJA (2007) Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering, Dordrecht: Springer Netherlands.
26.
SabatierJFargesCTrigeassouJC (2013) A stability test for non-commensurate fractional-order systems. System and Control Letters62(9): 739–746.
27.
Tenreiro MachadoJA (2016) Fractional dynamics in the Rayleighs piston. Communications in Nonlinear Science and Numerical Simulation31(1–3): 76–82.
28.
ValérioDTrujilloJJRiveroMet al. (2013) Fractional calculus: a survey of useful formulas. The European Physical Journal Special Topics222: 1827–1846.
29.
XingSLuJ (2009) Robust stability and stabilization of fractional-order linear systems with nonlinear uncertain parameters: an LMI approach. Chaos Solitons Fractals42: 1163–1169.