
Abstract
To accurately describe the dynamic features of inter-shaft bearings with localized defect under operation, the dynamic model of inter-shaft bearing with localized defects was established with respect to time-varying displacement excitation. Based on fault simulations on a birotor experimental rig, the developed dynamic model of inter-shaft bearing is validated to have high accuracy (over 99%) when localized defects happen on inner and outer race with co- and counter-rotation, which indicates that the model can be adopted to simulate the faults of inter-shaft bearing instead of experiment. Through investigation of the square-root (SR) amplitudes of bearing vibration with different defect sizes, radial loads, and rotational directions, we find that the SR amplitudes of bearing vibration increase with increasing defect size and radial load for both co- and counter-rotation. The amplitudes of counter-rotation are larger than those of co-rotation for inner race and outer race, and the amplitude of inner race defect are larger than that of outer race defect for the same defect size or same radial load. This work reveals the SR variation of bearing vibration with localized surface defects under different defect sizes and radial loads, and accurately describes the dynamic characteristics of inter-shaft bearing with localized defects. The efforts of this study open a door to adopt a dynamic model in the future to evaluate and monitor the health condition of inter-shaft bearings in an aeroengine or other rotating machinery.
1. Introduction
Inter-shaft bearings are widely applied to connect high- and low-pressure shafts among birotor or multi-rotor structures of an advanced aeroengine or gas turbine (Fei and Bai, 2013). The inter-shaft bearing has to work in the complex environment of high temperature and is difficult to lubricate (Ai et al., 2017). Therefore, this inevitably leads to damage on the surfaces of both inner race and outer race of an inter-shaft bearing. To ensure the reliability and security of an aeroengine, it is of profound significance for the fault prediction of the bearings to establish the dynamic model of inter-shaft bearings with surface defects and then to achieve early vibration characteristics by simulation analysis (Shah and Patel, 2014; Rai and Upadhyay, 2016).
Dynamic modeling and simulation on rolling bearings with surface defects have been widely investigated from theoretical and experimental perspectives. Sunnersjö (1978) built a four-degrees-of-freedom (DOF) model by adopting a nonlinear spring to be equivalent to rolling balls. But this model is only suitable for the dynamic characteristic analysis of rolling bearings with the emphasis on single transient state. McFadden and Smith (1984) studied a dynamic model of the vibration induced by a single point in the inner race of a rolling element bearing and then gained the vibration features of two faults. Su and Lin (1992) and Su et al. (1993) discussed the dynamic modeling of bearing faults under time-varying loads and analyzed frequency characteristics under different loads. Patel et al. (2010, 2013, 2014) built a six-DOF dynamic model for the fault simulation and analysis of rolling bearings. Patil et al. (2009, 2010) investigated the effect of defect sizes on vibration characteristics regarding a ball bearing as a nonlinear contracted spring. Kulkarni and Sahasrabudhe (2014) evaluated the influence of defect sizes, locations, and loads on outer race on the responses of ball bearing vibration by simulating the impulse-producing bearing fault based on a cubic Hermite spline on the foundation of Patil's model. Niu et al. (2017) established a six-DOF damage model of a ball bearing for each component of the bearing by considering various factors such as gyroscopic effect, eccentricity, and lubrication. Dougdag et al. (2012) developed a dynamic model of surface defects on ball bearings and validated the model by static and dynamic simulation experiments. Moazen et al. (2015) proposed a multi-body nonlinear dynamic model for the simulation and analysis of rolling bearing faults. Kankar et al. (2012) studied the influence of crinkles on inner and outer races on the dynamic characteristics of rolling bearings by forming the dynamic model of the crinkle. Kiral and Karagulle (2003) presented a dynamic model of a rolling element bearing based on the finite element method to acquire static and dynamic characteristics. Fei et al. (2014) opened the door to employing information entropy to detect rotor vibration fault quantitatively and achieve efficient signals of rotor vibration. From the above analyses, it is easily found that most studies on the dynamic modeling and simulation analysis of defects focus on general bearings such as the rolling element bearing. Besides, investigations on the dynamic modeling and dynamic characteristics analysis of inter-shaft bearings have not been carried out until now.
The objective of this paper is to develop a dynamic model of inter-shaft bearings with localized defects by considering bearing radial clearance, time-varying displacement excitation, and the rotational features of inner race and outer race. With the fault simulations of inter-shaft bearing with localized defects based on a birotor experiment rig, the feasibility and effectiveness of the proposed dynamic model is validated by comparing the results of model simulation with both experiments and theoretical values. Lastly, we investigate the dynamic characteristics of inter-shaft bearing with the defects of both inner race and outer race under co- and counter-rotation of two rotors, based on the proposed dynamic model with respect to different defect sizes and radial loads.
The rest of this paper is organized as follow. The dynamic model of localized defect in inter-shaft bearing is established under the excitation of time-varying displacement in Section 2. Section 3 discusses the experiments on a birotor test bench to simulate the fault of localized defects on inner race and outer race of inter-shaft bearing with co- and counter-rotation, and then the proposed dynamic model is validated by comparing with the experiment data. In Section 4, the dynamic characteristics of inter-shaft bearing with localized defect are investigated under the effects of different defect sizes and radial loads. Some conclusions of this study are summarized in Section 5.
2. Dynamic modeling
2.1. Simplification of inter-shaft bearing
For a birotor system, inter-shaft bearings are adopted to connect the two shafts. The two rotors in the bearing, the inner race and outer race, simultaneously rotate with high- and low-pressure rotors, following either co- or counter-rotation. The rotational speed of the bearing is determined by the difference of the rotational speeds of two rotors. A diagram of inter-shaft bearing is shown in Figure 1. The inter-shaft bearing of an aeroengine is usually a cylindrical roller bearing. When the rollers do not slip, the localized faults can be established as a four-DOF dynamic model based on Hertz contact theory (Shao et al., 2014; Liu and Shao, 2015). Based on Patil's hypothesis, the contact between roller and raceway can be simplified as a nonlinear spring–mass system.
Diagram of an inter-shaft bearing.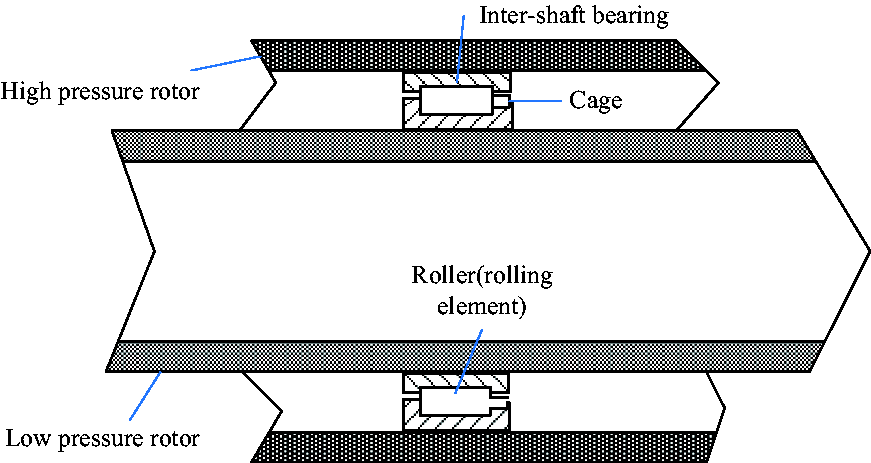
2.2. Hertz contact force
In line with Hertz contact theory (Shao et al., 2014; Liu and Shao, 2015), Harris et al. (2001) give the relationship between nonlinear loads and displacement as follows:

The total deformation between two races is defined as the sum of normal deformations between two races and rolling elements, i.e.,

In light of equations (1) and (2), K is obtained as

The reduced model of inter-shaft bearing investigated in this paper is shown in Figure 2. When H
d
is time-varying displacement excitation as the roller passes a defect, the deformation δ is
Reduced model of an inter-shaft bearing.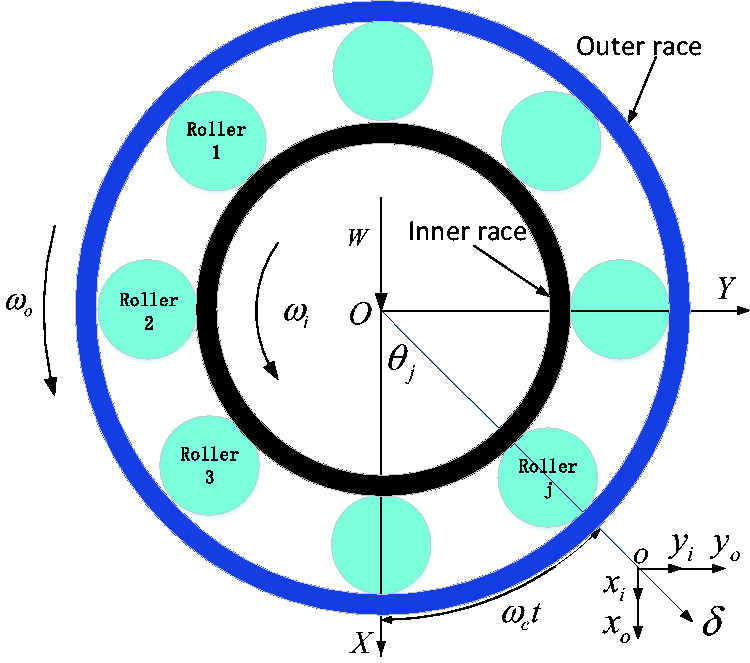




Thus, the component forces of the Hertz contact force in the directions of the x- and y-axes are expressed by
2.3. Excitation of time-varying displacement
This study focuses on the early outer race defect of an inter-shaft bearing and the radial length of the defect which is larger than that of cylindrical rollers. This fault has smaller width than the diameter of roller (rolling elements) so that the displacement of the declined roller is less than the defect depth when the roller goes through the defect. The status of a roller passing the defect is illustrated in Figure 3. Herein, H
d
is the displacement of the roller as passing the defect, H is the deflect depth, B is the defect width, and H
e
is the largest displacement excitation.
The state diagraph of the roller passing a defect.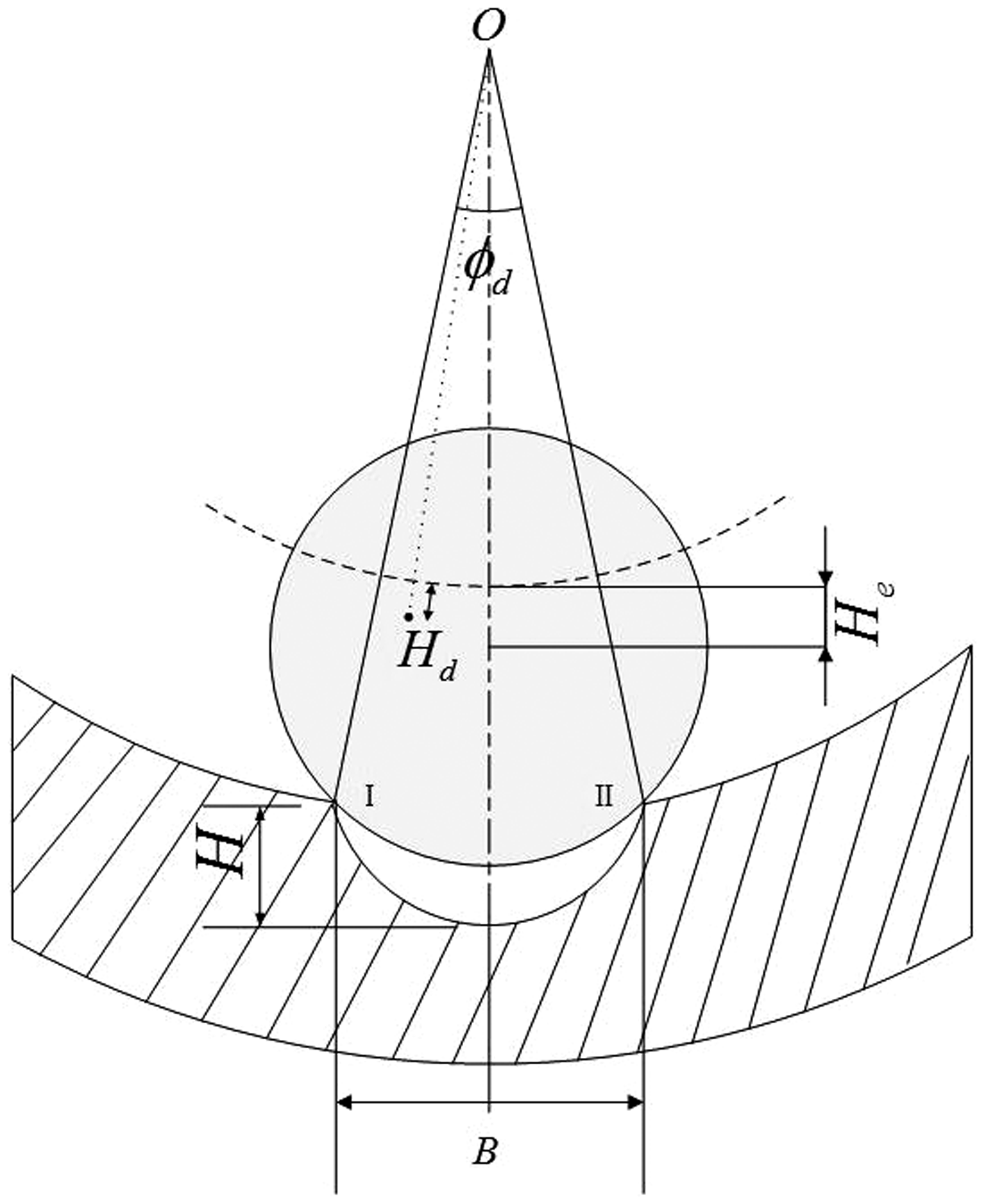
As illustrated in Figure 3, the roller always contacts edge I of the defect when the roller approaches and passes the defect, and is away from the defect region as it passes edge II of the defect. The time-varying displacement of the roller passing the defect can be described by a half-sine function. The maximum displacement excitation H
e
is expressed as

When the roller passes the defect, the excitation function of time-varying displacement is expressed as
Sketch map of a localized defect on the surface of the outer race.

When the defect is located on the inner race, the intersection angle θ
d
is described as

When the defect is located on the outer race, the intersection angle θ
d
is described as

2.4. Kinetic differential equation
Based on the hypothesis of a rigid ring (Ni and Deng, 2009), inter-shaft bearing is modeled as a four-DOF dynamic system. In line with the contact stiffness K, the damping c, the Hertz contact force F, the time-varying displacement x, and the constant radial load W, the kinetic differential equation of dynamic system is gained as

The improved Newmark-β method (Fleissner et al., 2007; Garza and Millwater, 2015) is applied for the solution of kinetic differential equation and has second order accuracy as γ = 1/2 and β = 1/4 (Zheng and Hasebe, 2000), which is an unconditional stability method.
3. Model validation
3.1. Experimental system
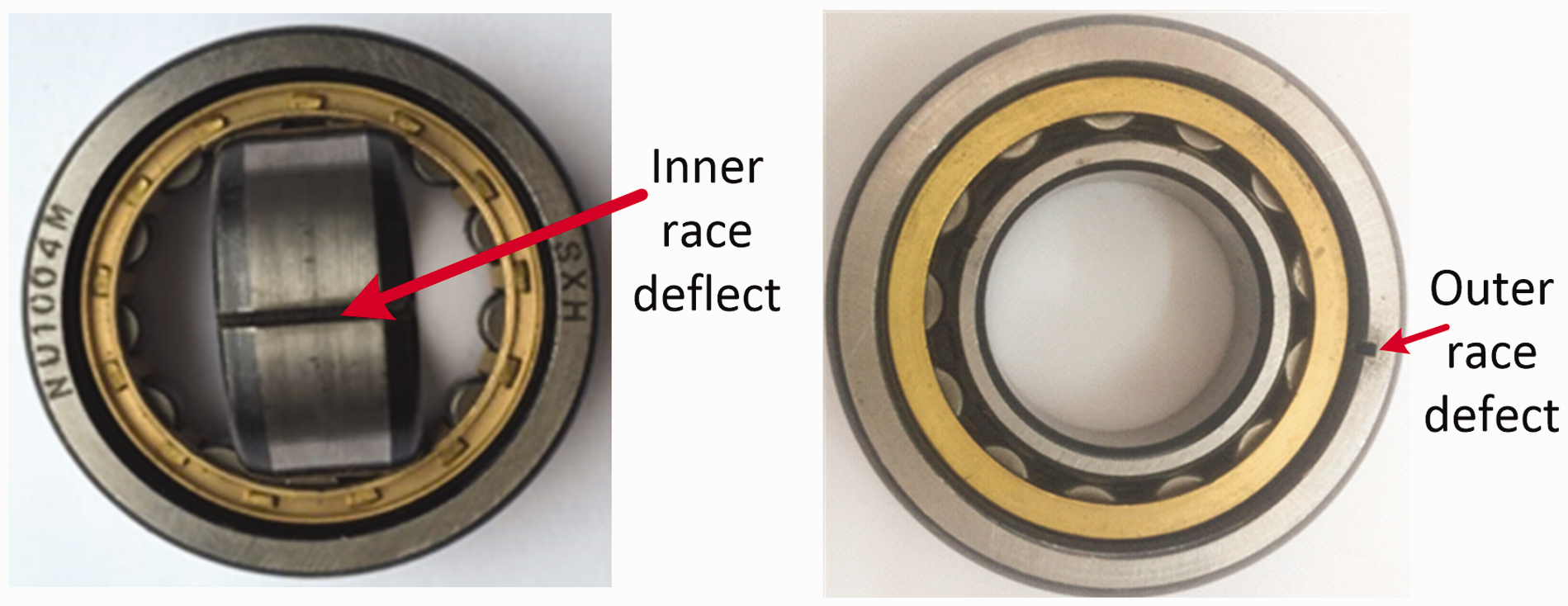
To validate the accuracy of the developed model, the birotor experimental system shown in Figure 5 was employed to simulate the localized defects of an inter-shaft bearing and acquire its fault data. Meanwhile, the experimental rig simulates the supporting scheme of an advanced aeroengine. In the experimental system, the bearing used is a cylindrical roller bearing (mode no. SKF nu1004M), in which the fourth supporting point is regarded as inter-shaft bearing. Four PCB acceleration sensors are located on the bearing pedestal and casing to measure and collect vibration data of the inter-shaft bearing in the x- and y-directions. The distribution of sensors and data acquisition system are displayed in Figure 6. The data obtained are employed to test the analytical results of the proposed dynamic model. Besides, by using a wire-electrode cutting method, a surface defect is produced on the outer race in which the shape of the defect is indicate by the red arrow in Figure 7.
Fault simulation system of birotor inter-shaft bearing. Distributions of vibration sensors (left) and data acquisition system (right). Localized defects on the inner race and outer race of an inter-shaft bearing.
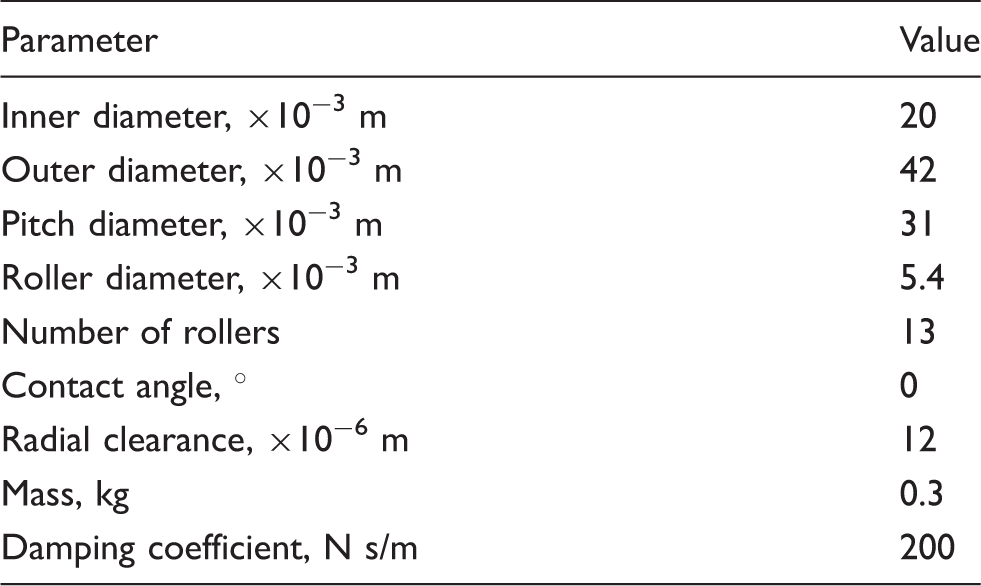
3.2. Parameters of inter-shaft bearing
The parameters of the SKF nu1004M bearing.
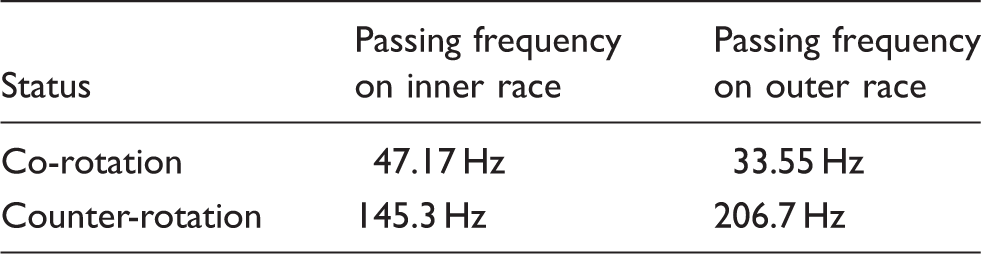
Passing frequency of inter-shaft bearing with defects.
3.3. Validation of dynamic model
Owing to structural features of the inter-shaft bearing, fault signals simulated in the experimental rig are transmitted into pedestal and casing from the sources of signals by a complex transmission path (Fei et al., 2018). Thus, it is unavoidable in this path that some noise is overlaid on the original signals so that the collected signals of bearing vibration contain some noise. To reduce the influence of noise, the multi-scale morphological filtering method (Li et al., 2011) and wavelet de-noising method (Kim et al., 2001) were utilized to de-noise the acquired fault signals. Then, the time-domain signals and the envelope spectrum of outer race fault are as dispicted in Figure 8.
(a) Time-domain signal and (b) envelope spectrum of an outer race defect with co-rotation based on experiment.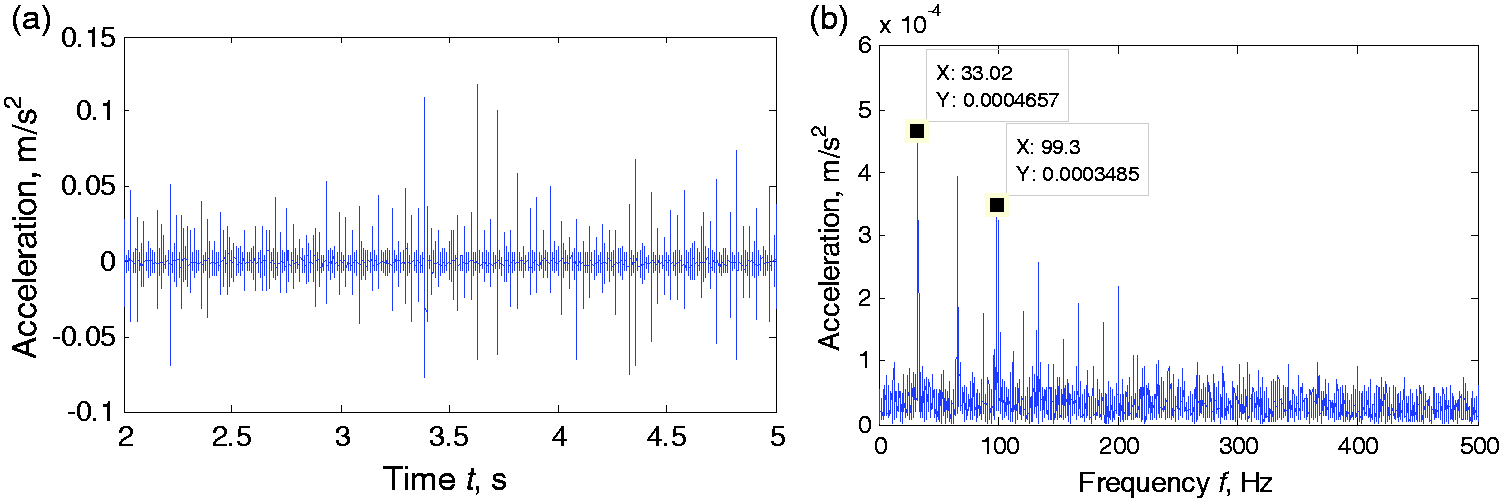
As shown in Figure 8(a), when the outer race of the inter-shaft bearing has a defect, the time signal of this defect has an obvious impact phenomenon and the shock pulses exhibit periodical change. The periodical impact phenomenon is caused by the effect of the rotating frequencies of shaft or holder on the impacts produced as rollers pass the defect. As shown in Figure 8(b), the passing frequency of rollers going through outer race is 33.02 Hz and has an error of 0.53 Hz relative to theoretical value 33.55 Hz in Table 2. Perhaps the reason is that the bearing slips in experiment and the slip appears as second harmonic and third harmonic frequencies of the passing frequency.
When the defect is located on the outer race of the inter-shaft bearing, based on the established dynamic model the time-domain signals and the envelope spectrum of outer race fault in the inter-shaft bearing are as illustrated in Figure 9.
(a) Time-domain signal and (b) envelope spectrum of outer race defect signals with co-rotation based on the model.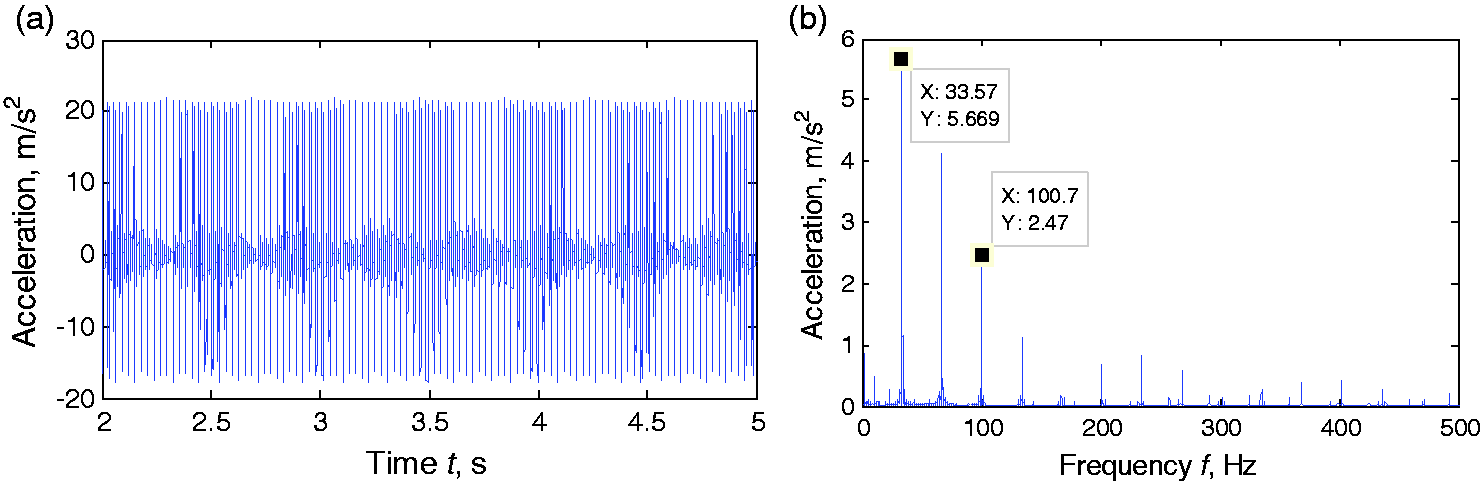
As revealed in Figure 9(a), the time-domain signals of bearing vibration also hold obvious periodical impact components. Figure 9(b) illustrates that the envelop spectrum gained from model simulation contains 1–4 multiple frequencies of the passing frequency and the amplitudes of the signals reduce progressively, which are basically consistent with that obtained from experiment. The passing frequency based on the model is 33.57 Hz, which is almost equal to the theoretical value, 33.55 Hz. Therefore, the developed dynamic model of localized defect in inter-shaft bearing is verified to be efficient and precise, because it is able to more accurately describe the dynamic characteristics of inter-shaft bearing with localized defects than the experiments on birotor simulation test rig.
Figure 10 shows the envelope spectrum of the experimental and simulation signals with co-rotation, when the defect is located on the inner race of the inter-shaft bearing. As shown in Figure 10(a), the experimental envelope spectrum contains multiples of the passing frequency of the inner race fault. Although the signal contains a lot of noise, the fault frequency is obvious. Comparing Figure 10(a) and (b), we find that the results of the dynamic model are basically consistent with the experimental results. The experimental model and the dynamic model contain the same trend of the fault frequency, and the amplitude decreases with the increasing multiplier frequency. The fault frequency calculated by the dynamic model is 47.76 Hz, and the fault frequency measured by experiment is 47.21 Hz. The error is only about 1%, which proves that the dynamic model developed in this paper can effectively and accurately simulate the inner ring fault of the inter-shaft bearing.
Envelope spectra of inner race defect with co-rotation from (a) experiment and (b) simulation.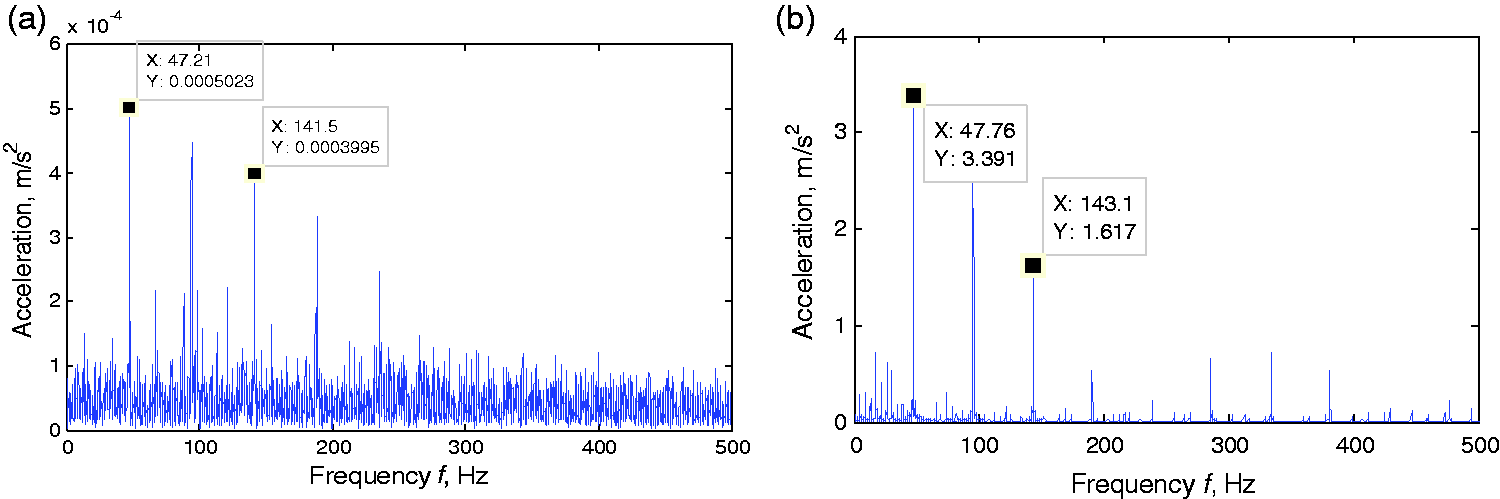
To further support the effectiveness of the developed dynamic model, four working conditions of co- and counter-rotation with respect to inner race defect and outer race defect are evaluated. From the analyses, the envelope spectra of the four cases are shown in Figures 10 and 11.
Envelope spectra of (a) outer and (b) inner race defect signals with counter-rotation.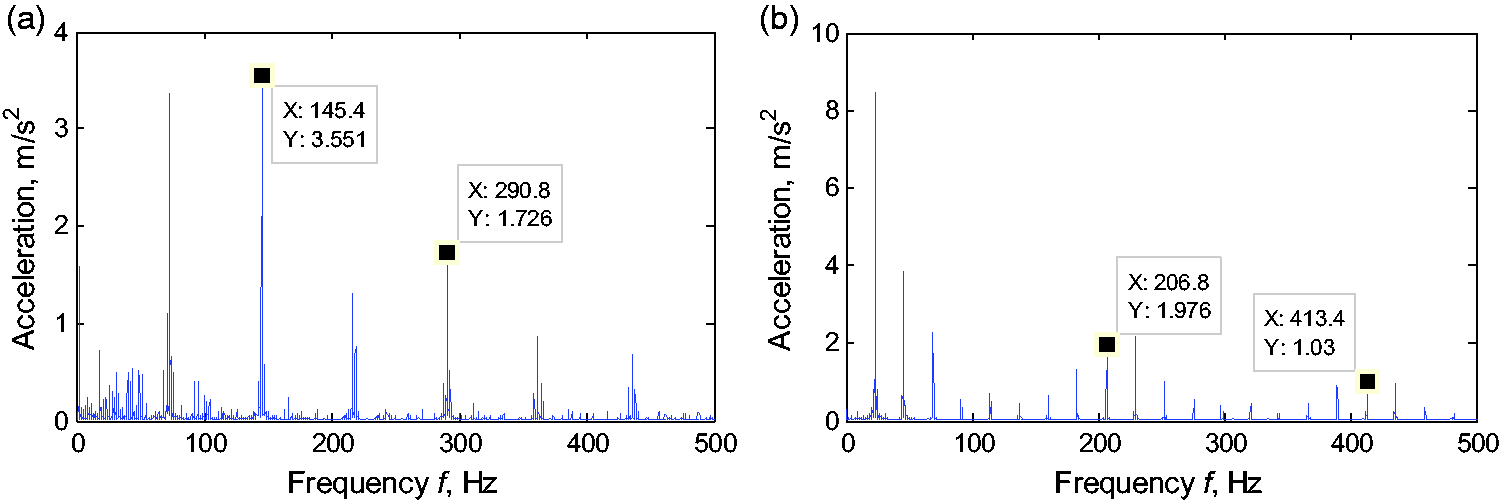
As revealed in Figures 10 and 11, the fault frequencies of four defects are clearly simulated including frequency features of fault signal on original frequency, double frequency, and triple frequency. With respect to the theoretical values in Table 2, the errors of fault frequency based on dynamic model are less than 1%. Therefore, the proposed dynamic model is again verified to achieve high accuracy in describing the dynamic characteristics of an inter-shaft bearing with localized defects. Additionally, it is also seen that the (acceleration) amplitudes of envelope spectra for inner race defects are greater than outer race defects, and those of counter-rotation are higher than co-rotation with respect to the same order of frequency.
4. Simulation of dynamic characteristics of inter-shaft bearings
The excellent performance of the developed dynamic model has been validated in the above section. In this section, we investigate the dynamic characteristics of an inter-shaft bearing with numerous localized defects and radial loads to achieve precise information for performance evaluation and heath monitoring of an inter-shaft bearing.
4.1. Effect of defect size on vibration of inter-shaft bearing
The square root (SR) amplitude of a signal reflects the energy magnitude of this signal (Pachaud et al., 1997) and can be used to assess the degree of the bearing fault and the stability of the fault. A slight fault has a small impact on the SR value. The SR value becomes large with increasing impact energy. Thus, the SR value of signal amplitude is used in this paper to evaluate the damage degree of bearing faults. The SR formula is as follows:

Based on the built dynamic model, the SR values of fault signals of an inter-shaft bearing affected by the radial load of 300 N are discussed when the variation of defect size is from 0.1 mm to 2 mm with the interval of 0.1 mm. For the conditions of co- and counter-rotation, therefore, the SR variations of vibration signals for inner race defects and outer race defects are obtained, as shown in Figure 12.
SR variations of bearing vibration signals under different sizes of (a) outer and (b) inner race defects.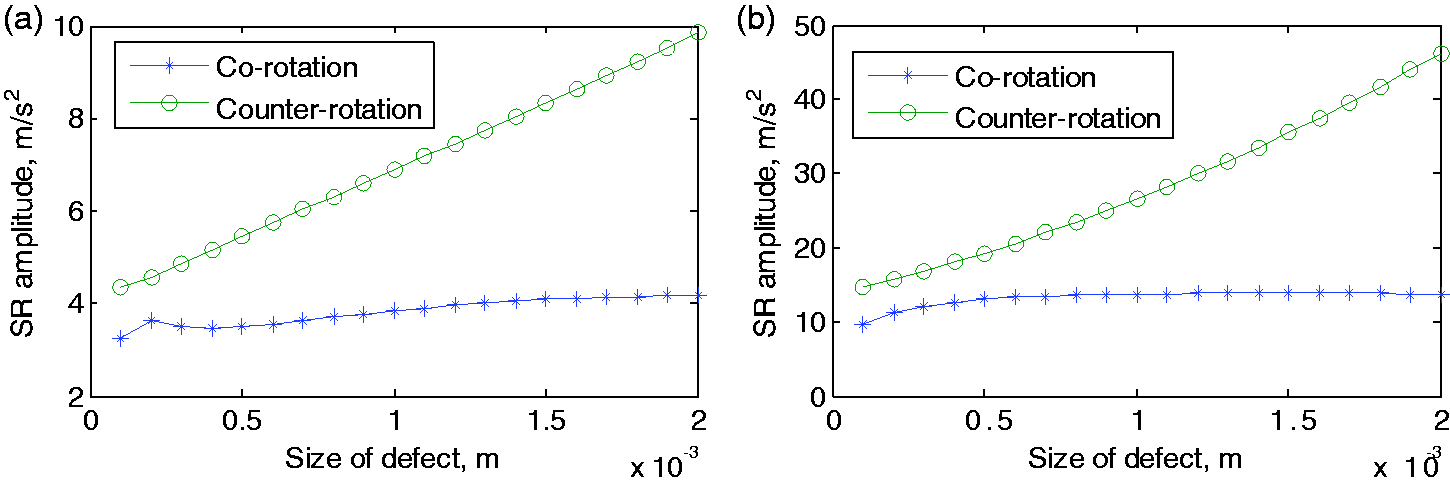
4.2. Effect of radial loads on vibration of inter-shaft bearing
This subsection reports the effect of radial loads on the vibration of an inter-shaft bearing. A defect size 0.5 mm is selected as the objective of study. In terms of the established dynamic model, with the variation of radial loads the SR changes of bearing vibration signals on the inner and outer race defects with co- and counter-rotation are shown in Figure 13.
SR variation of bearing vibration signals under different loads on (a) outer and (b) inner race defects.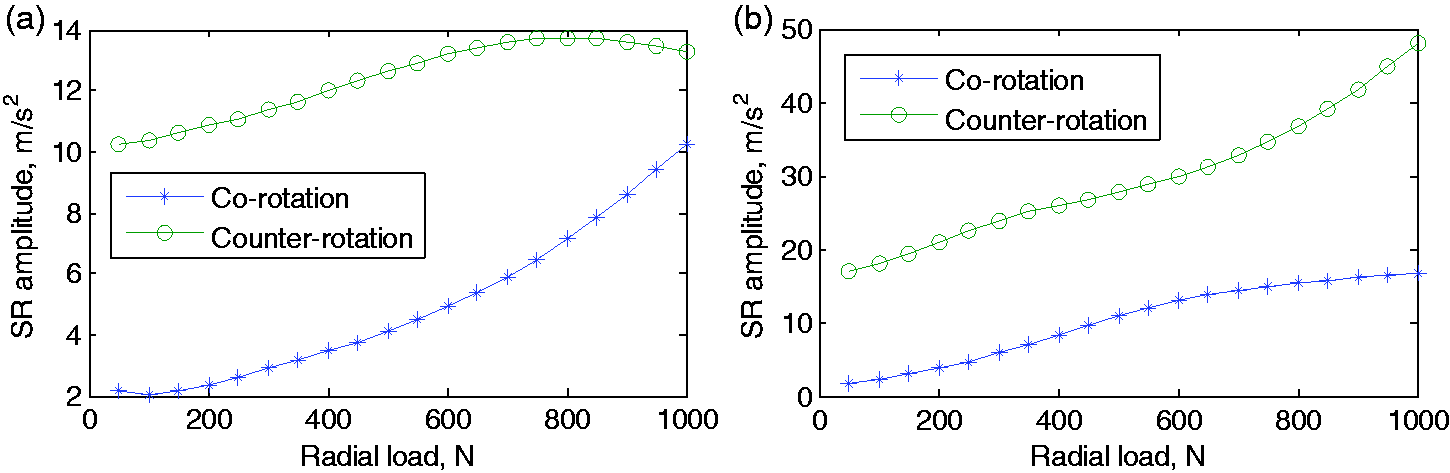
4.3. Discussion
Through the research of the vibration features of inter-shaft bearing with localized defects affected by different defect sizes and radial loads, some results can be achieved as follows:
As revealed in Figure 12, for both co- and counter-rotation between inner race and outer race, the SR values of vibration signals increase with the increase of defect size, which indicates that the energy of vibration for bearing increases with increasing size of defect. The reason is that the increase of defect size enhances the SR of vibration amplitude and then increases impact energy when the roller passes the defect. For the same size of bearing defect, the SR value of vibration for counter-rotation is larger than that of co-rotation, resulting from the fact that the rollers pass the defect more frequently and its impact energy is larger during the same time when inner race and outer race reversely rotate. In addition, we also find the phenomenon that the SR value for inner race defect is larger than that for outer race defect when they have the same defect. This is because the impact number (or passing frequency) of the defect on inner race is larger than that on outer race in the same time due to the smaller radius for inner race versus outer race. The SR amplitude exhibits a growing trend as the fault size increases in co-rotation, but it is relatively stable with respect to the counter-rotation. The reason is that the speed discrepancy between inner race and outer race is relatively small with the fault passing frequency of 33.57 Hz. When the fault size increases, the fault depth does not increase too much and the fault frequency is low. Thus, the change of impact energy is not large due to the relative stable SR value. For counter-rotation, larger speed discrepancy between the inner race and outer race causes more impacts, larger impact energy, and more obvious fault.
As indicated in Figure 13, the SR values of bearing vibration have the increasing trend with the rise of radial loads, for the co-rotation and counter-rotation of inter-shaft bearing, because the rise of radial loads enlarges the energy of impact as rollers go through the defect. Besides, the SR value of bearing vibration for counter-rotation is larger than that for co-rotation. The reason is that the passing frequency for counter-rotation is higher than for co-rotation, so that the impact frequency between roller and surface defect is higher for counter-rotation, and thereby the SR value of bearing vibration for an inner race defect is larger than that for an outer race defect. Besides, the increasing trend of SR value of both co- and counter-rotation is more obvious with the increase of load than the size. This is due to the change of the vibration caused by the size change is not very obvious, but the increase of the load on the impact energy is more prominent.
In conclusion, the change of the SR amplitude of bearing vibration with localized surface defects is acquired with the variations of defect size and radial load, which accurately reflects and describes the dynamic characteristics of inter-shaft bearing with localized defect on inner race and outer race. These results cater for engineering practice, which further support the effectiveness and feasibility of the developed dynamic model in the simulation of inter-shaft bearing faults. The efforts of this study open a door to evaluate and monitor the health condition of inter-shaft bearings in an aeroengine using the dynamic model.
5. Conclusions
The aim of this paper was to develop an efficient dynamic model of localized defects in an inter-shaft bearing with respect to time-varying excitation of displacement, and to accurately simulate and describe the dynamic characteristics of an inter-shaft bearing with localized defects. Through the validation of the developed model and the investigation on the dynamic characteristics of inter-shaft bearing with localized defects based on the developed model, some conclusions are summarized as follows:
Through the study on validation of the dynamic model by comparison with experiment on a birotor simulation test rig, it is indicated that the developed model has higher computational accuracy in acquiring impact responses (time-domain signals and envelope spectrum of localized defect on outer race of inter-shaft bearing), which is almost consistent with the theoretical values. As shown in the investigation on the dynamic responses of the inner and outer race defects of inter-shaft bearing with co-rotation and counter-rotation, the developed model achieves an error of less than 1% and high modeling precision referring to the theoretical values. From the simulation of dynamic characteristics of inter-shaft bearing by regarding different defect sizes and numerous radial loads, we find that (i) with the increase of defect size or radial load, the square-root (SR) amplitude of bearing vibration with inner and outer race defects enlarges for co-rotation or counter-rotation; (ii) for a same fault or load, the SR amplitudes of bearing vibration for co-rotation is smaller than these for counter-rotation; (iii) for a same defect size or radial load, the SR amplitudes of inner race are greater than these of outer race for inter-shaft bearing.
The SR change of bearing vibration with regard to different defect size and radial loads are acquired, which accurately describe the dynamic characteristics of inter-shaft bearing with localized defect on inner race and outer race with co-rotation and counter-rotation referencing experiment results and theoretical values. The achievements cater for engineering practice, which full support the effectiveness and feasibility of the developed dynamic model in simulating inter-shaft bearing faults. The efforts of this study provide a useful insight to adopt a dynamic model to evaluate and monitor the health condition of inter-shaft bearing in an aeroengine or other rotating machinery.
Footnotes
Acknowledgements
The authors would like to thank the organizations that provided funding for this work.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This wok was supported by the National Natural Science Foundation of China (grant numbers 11702177 and 51605016), the Natural Science Foundation of Liaoning Province of China (grant number 20180550650), and Research Start‐up Funding of Fudan University.