
Abstract
In this article, a novel vibration control scheme of suspension systems is proposed. It combines the advantages of quasi-zero stiffness isolator, nonlinear energy sink absorber, and inerter. This proposed scheme can achieve low transmissibility, low amplitude, and low additional weight and resolve the conflict between riding comfort and handling stability. Strong nonlinear vibration equations of a quarter-vehicle suspension system are established. It also presents the detailed process of high-order harmonic approximation to obtain steady-state responses. Moreover, approximate solutions are validated by a numerical method. Furthermore, based on riding comfort and handling stability, the following four suspension systems are evaluated and compared, namely, 2-degree-of-freedom quarter-vehicle model, 2-degree-of-freedom quarter-vehicle with quasi-zero stiffness isolator, 2-degree-of-freedom quarter-vehicle with inerter-nonlinear energy sink absorber, and 2-degree-of-freedom quarter-vehicle integrated control scheme with quasi-zero stiffness and inerter-nonlinear energy sink. It is found that the integrated control scheme with quasi-zero stiffness and inerter-nonlinear energy sink can significantly improve the riding comfort and handling stability at the same time. In addition, the effects of system parameters are studied carefully. The results show that based on the reasonable design of the control system parameters, better riding comfort and handling stability can be obtained. In short, this article provides a theoretical basis for integrating quasi-zero stiffness isolators and inerter-nonlinear energy sink absorbers to improve the riding comfort and handling stability.
Keywords
1. Introduction
The main vibrations source in a vehicle is the road surface irregularity (Du et al., 2020), and the vibration is excited and transmitted to the vehicle body through the tire and suspension assembly. The performance of the suspension system has a great influence on the riding comfort and handling stability of the vehicle. However, there is a conflict between riding comfort and handling stability to traditional passive suspension. How to resolve this contradiction has become the focus of many scholars (Qin et al., 2017).
Vibration isolation and vibration absorption are two ways of passive vibration control (Zhang et al., 2011). To overcome the limitations of linear vibration control, the field of nonlinear vibration isolation and absorption has attracted extensive attention (Gatti, 2017; Geng et al., 2020; Pu et al., 2019; Wang et al., 2019b; Wang et al., 2018a; Yan et al., 2019a; Yan et al., 2019b). Quasi-zero stiffness (QZS) vibration isolation and nonlinear energy sinks (NESs) vibration absorption have well developed in the past few years (Han et al., 2015; Lu et al., 2019; Zang et al., 2018; Zhang et al., 2011; Zhang et al., 2019a; Zhang et al., 2019c).
A QZS system can be implemented by many different mechanisms on the same principle, that is, adding negative stiffness mechanisms to positive stiffness systems. How to generate negative stiffness is the difficulty in realizing QZS. There are various ways to realize the negative stiffness, for example, cam rollers (Wang et al., 2016), magnet (Wang et al., 2020), and Euler buckled beams (Liu et al., 2013). Carrella et al. (2007) proposed a QZS isolation model and studied its static characteristics. Abbasi et al. (2016) optimized the suspension with high static stiffness and low dynamic stiffness. Ding and Chen (2018), Ding et al. (2019) applied QZS to fluid-conveying pipes and a slightly curved beam. Ye et al. (2020) designed a QZS isolation system for supporting different loads. The advantages of QZS isolators are gradually discovered. Recently, QZS has been used to improve the riding comfort of vehicle suspension systems. Le and Ahn (2011) and Wang et al. (2018b) built QZS seat suspension to improve the riding comfort.
An NES consisted of an elastic element with cubic stiffness, a damping element, and an inertia element. NES cubic stiffness is achieved in a variety of ways, the most common being wire ropes and thin-walled beams fixed at both ends (Jiang et al., 2003; Kremer and Liu, 2014). The NES can effectively realize the targeted energy transfer (Al-Shudeifat et al., 2016). It is a very effective nonlinear dynamic vibration absorber (Al-Shudeifat, 2014). Compared with linear systems, the NES can dissipate vibration energy and absorb vibration significantly in the wide band, but the natural frequency of the system does not change much (Yang et al., 2017). What is more, a linear system with NES can also realize significant vibration reduction under harmonic and random base excitations (Xue et al., 2019). Therefore, NES can be found ranging from the discrete system (Jiang et al., 2003; Kremer and Liu, 2014), the rotor system (Bab et al., 2015b), to the string (Zulli and Luongo, 2014), the beam (Avramov and Gendelman, 2009; Bab et al., 2015a), and the pipe (Yang et al., 2013). Naturally, it is also widely used in the fields of vehicle (Anubi and Crane, 2015), civil engineering (Wang et al., 2019a; Wierschem et al., 2017), aerospace (Bergeot et al., 2017), and vibration energy harvesting Zhang et al. (2019d), Li et al. (2018), Zhang et al. (2019b) and has been rapidly developed.
Vehicles have high requirements for lightweight. Therefore, the NES mass should be as small as possible. An inerter provides an effective way to reduce the mass required for the NES. Smith (2002) proposed a mechanical element that provides inertial parameters and named it inerter. A conventional container is a mechanical element that connects the two terminals. The force acting on the ends of the inerter is proportional to the relative acceleration. Both mass and inertial components can be used to provide inertia, except that mass can only provide a constant inertia equal to its own mass. However, the inertia provided by the inerter is much greater than its own mass. For example, the ball screw manufactured by the Engineering Department of the University of Cambridge has a mass of 1 kg but an adjustable inertia of 60–240 kg (Chen et al., 2009). Based on this advantage, the inerter has been widely applied in building Giaralis and Petrini (2017), Giaralis and Taflanidis (2018), Lazar et al. (2014) and vehicle fields (Chen et al., 2009; ; Hu et al., 2017; Li et al., 2011; Papageorgiou and Smith, 2006; Smith and Wang, 2004; Wang et al., 2006; Zhang. et al., 2012) in recent 10 years.
Zhang et al. (2019e) replaced the mass in the NES with the inerter, and proposed a new NES, indicating that the inerter can significantly reduce the additional mass and achieve a good vibration absorption effect. Chen et al. (2020) attached inertial NES to a composite plate and found that it has good efficiency in eliminating vibration for both low-order and high-order resonance.
The novelty of this article is to propose a suspension vibration control scheme, which combines the advantages of QZS, inerter, and NES. This proposed scheme can achieve low transmissibility, low amplitude, and low additional weight. The approximate analytic solutions of vibration responds are obtained by the harmonic balance method. It finds that the new suspension system can not only greatly improve the vehicle riding comfort but also effectively improve the vehicle handling stability at the same time.
2. Mechanical model
The QZS characteristics and inerter-NES are introduced to the 2-degree-of-freedom quarter-vehicle (2-DOFQV) suspension system; the new model shown in Figure 1 is established 2-DOFQV integrated with the QZS and inerter-NES (with INT). Note: DOFQV: degree-of-freedom quarter-vehicle; QZS: quasi-zero stiffness; NES: nonlinear energy sink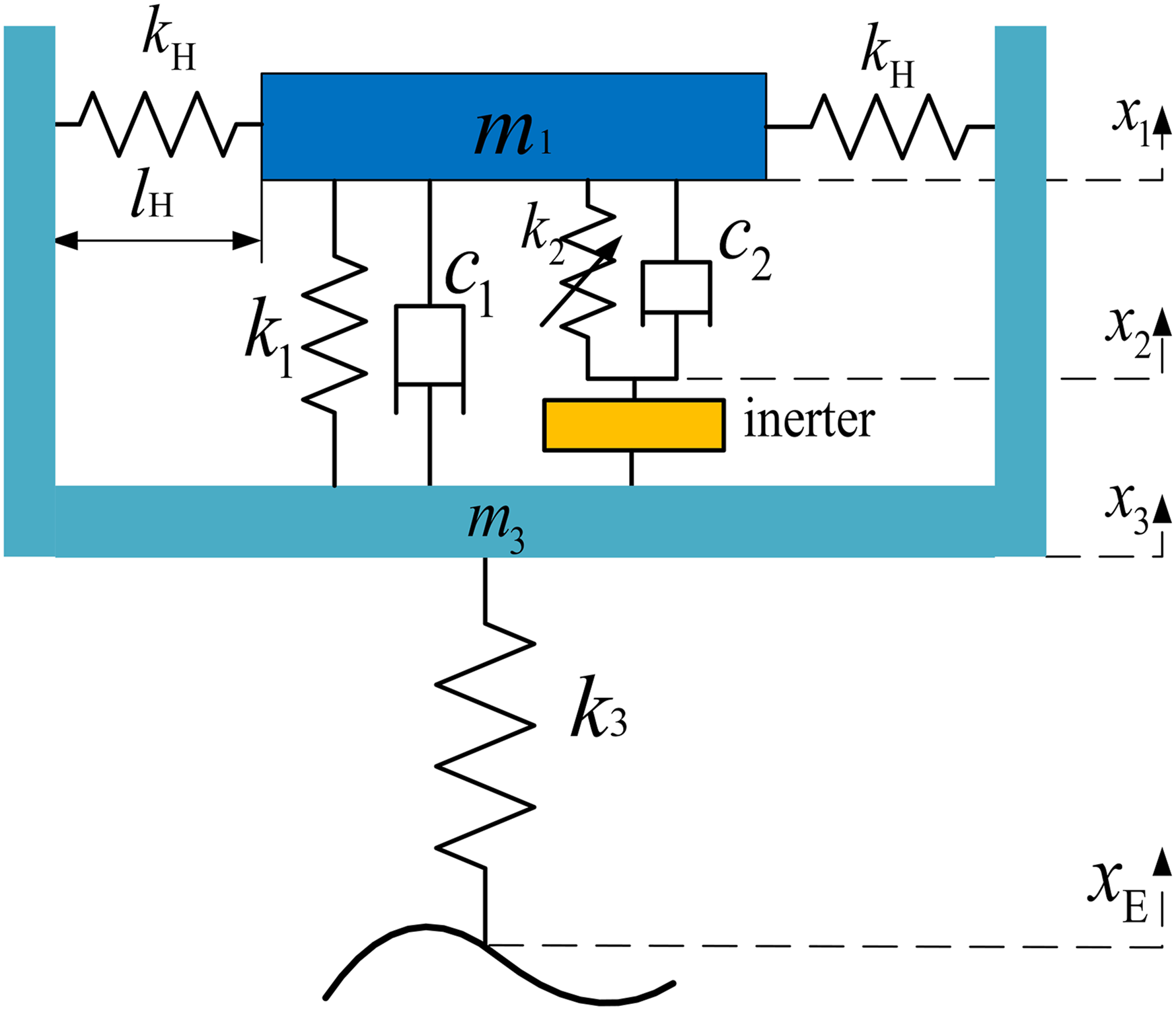
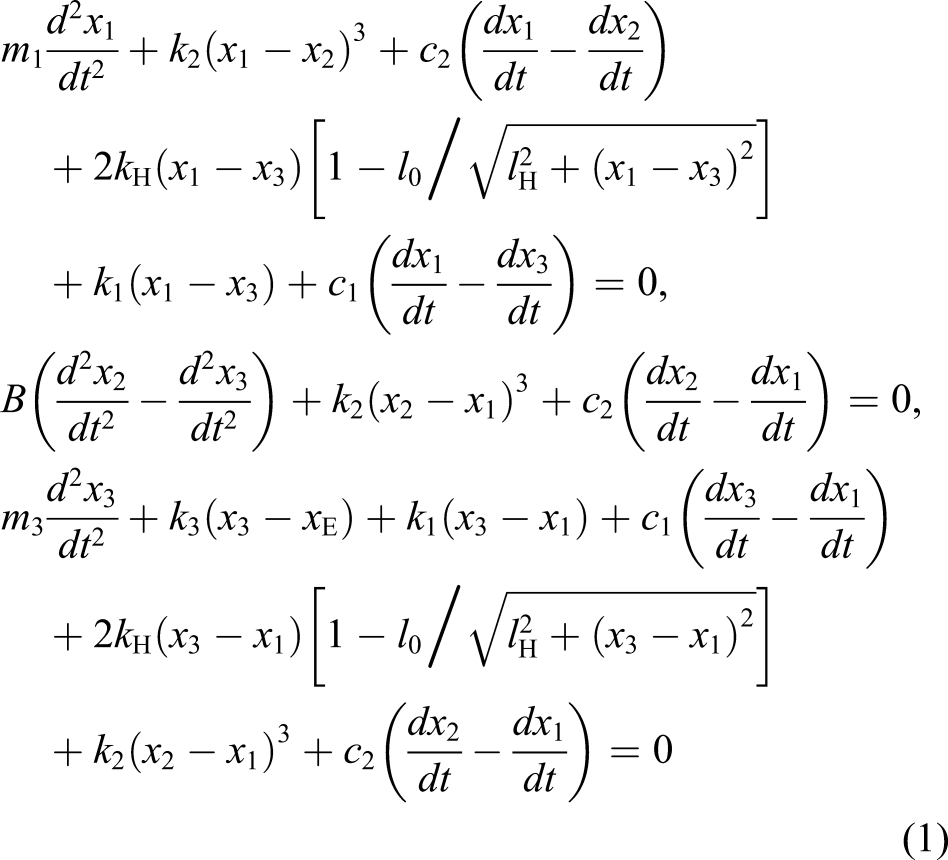
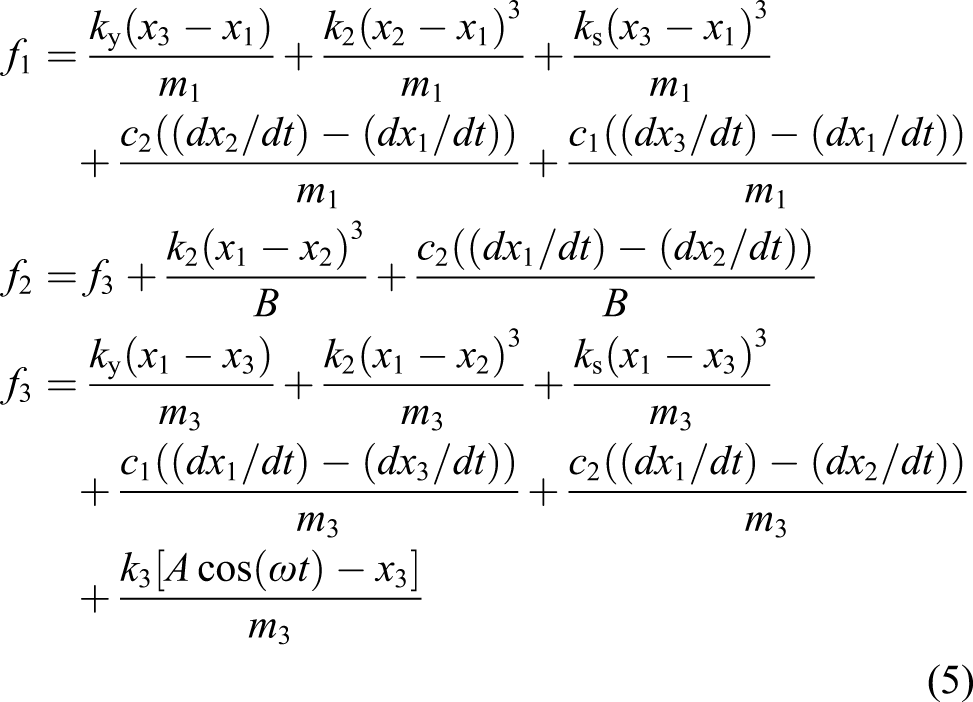
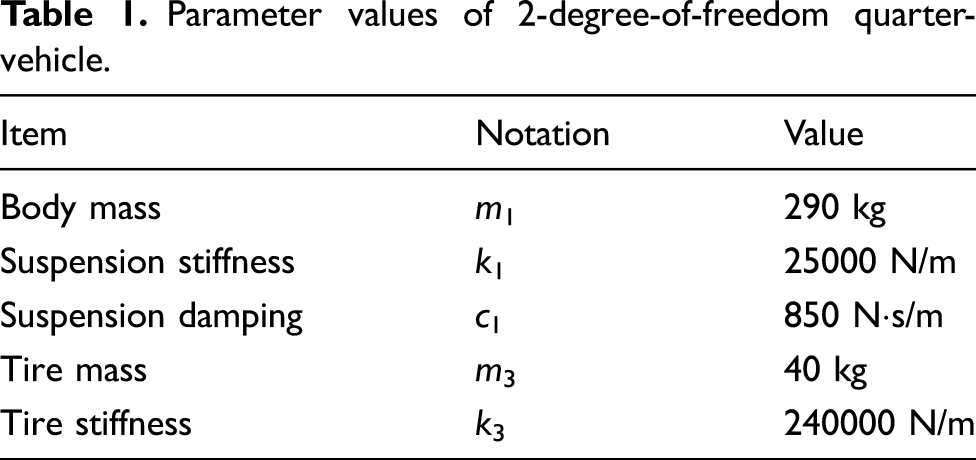
By using Newton’s second law, the dynamic equations of the system in Figure 1 are derived as m1, k1, and c1 which represent the body mass, suspension stiffness, and damping, respectively. m3 is the mass of the tire. k3 is the vertical stiffness of the tire. kH is the stiffness of the oblique linear spring. l0 is the original length of the oblique linear spring. lH is the length of the oblique linear spring when it is in the horizontal position. B is the inertia coefficient of the inerter. k2 and c2 are the nonlinear stiffness and linear damping of the NES, respectively. The new suspension system is subjected to the harmonic excitation of the base motion xE = A cos(ωt), where A and ω are the amplitude and circular frequencies of the road excitation, respectively. x1, x2, and x3 are the displacement response of the body, the NES, and the tire, respectively. While x1 − x3<0.2lH (Lu et al., 2019)

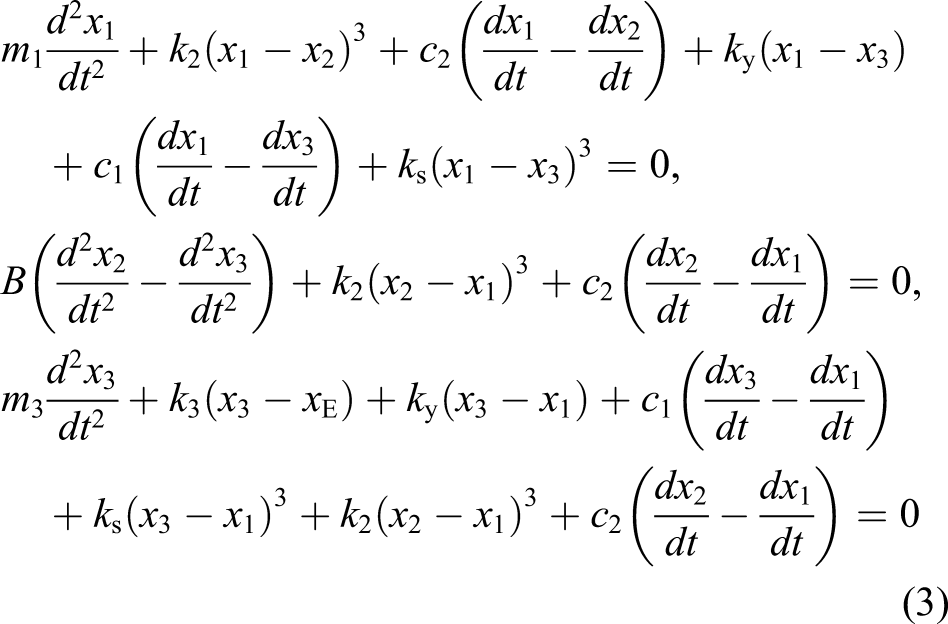
Substituting equation (2) into (1), we get
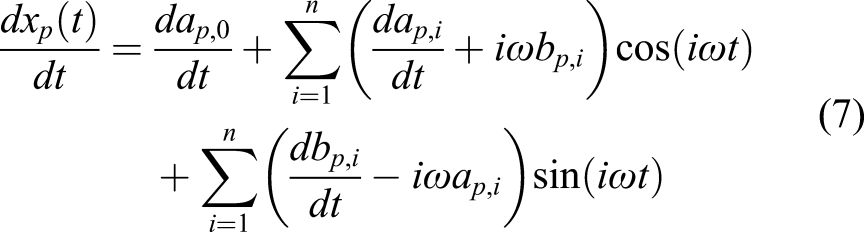
The harmonic balance method is applied. The analytical solution of the displacement response of the vehicle body (x1), the NES (x2), and the tire (x3) is assumed as (Luo and Huang, 2013)

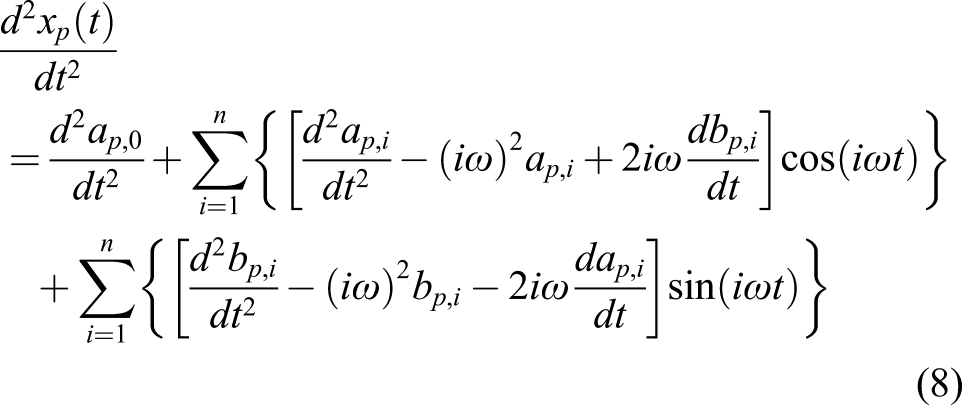
Based on equation (6), the velocity and acceleration responses are
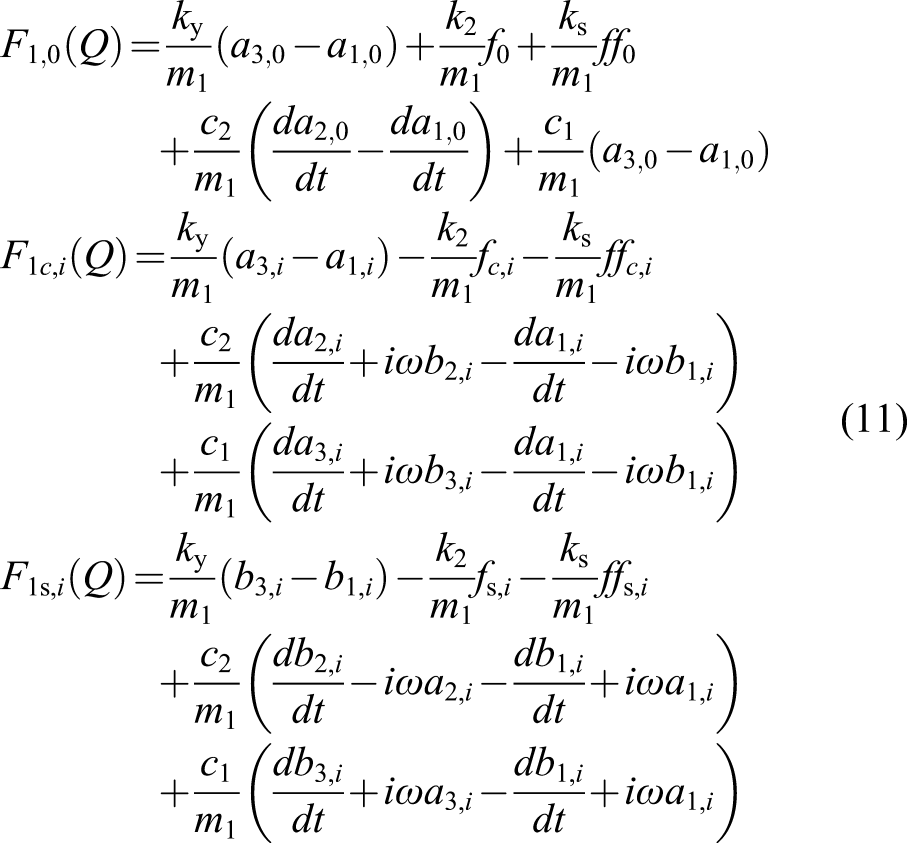
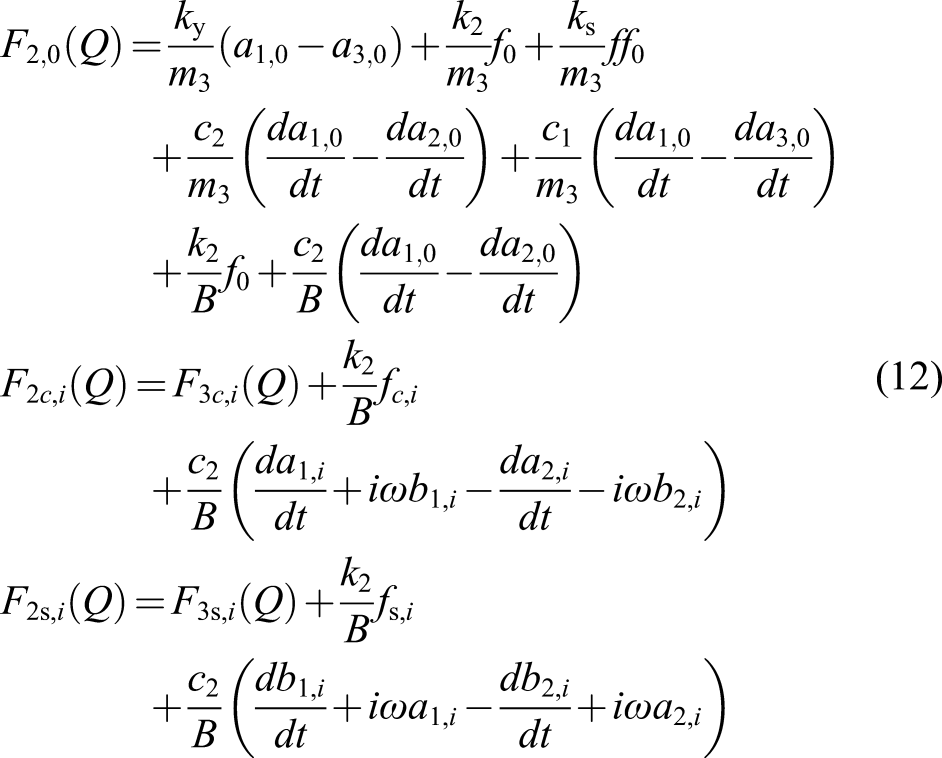
Substituting equations (6)–(8) into (5) and balancing the coefficients for all harmonic terms of cos(iωt) and sin(iωt) give
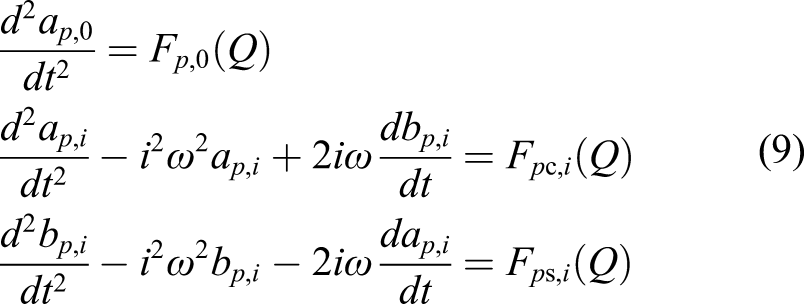
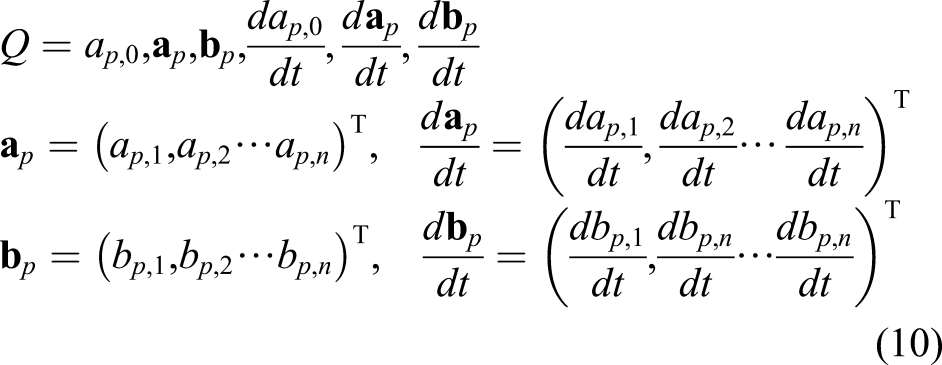
Next, the coefficients of cos(iωt) and sin(iωt) for
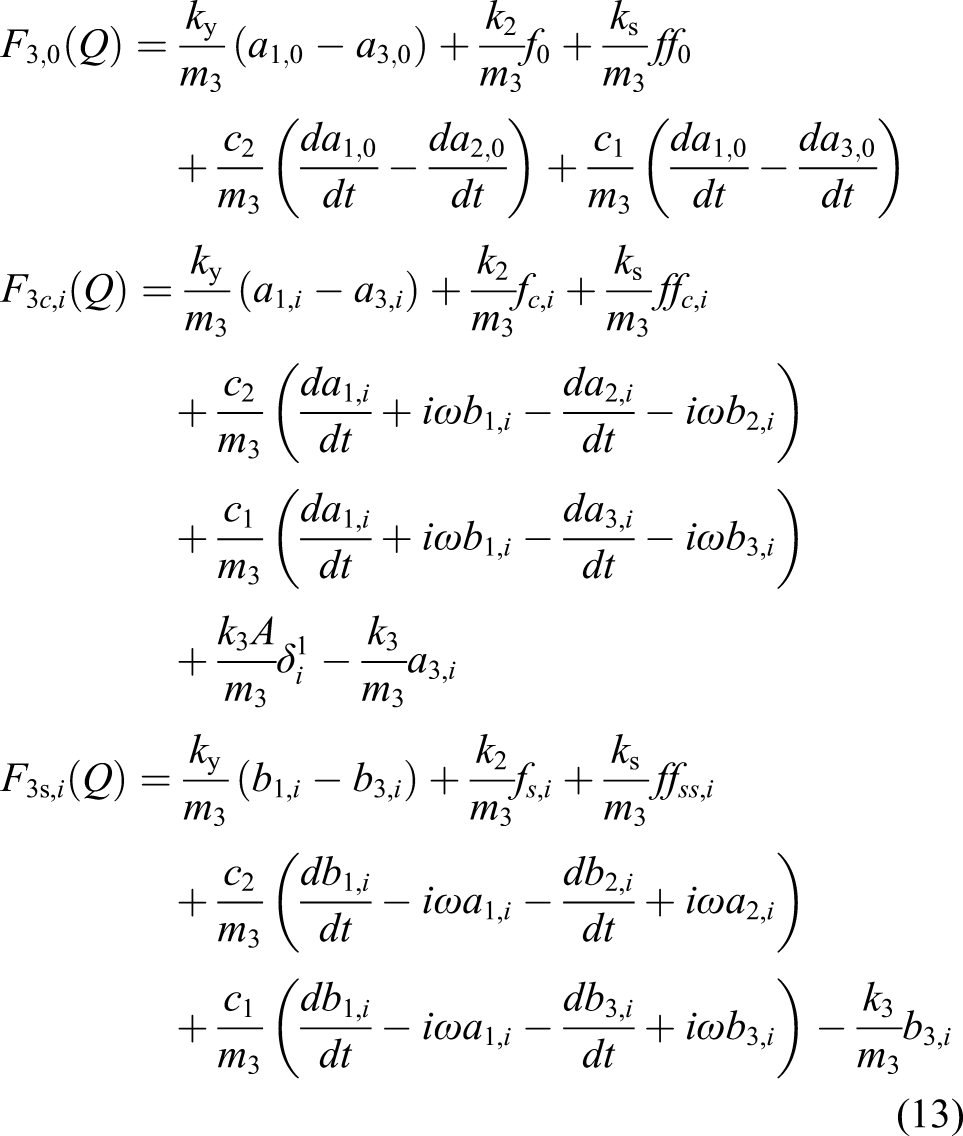
Because of the symmetrical motion, a1,0 = a2,0 = a3,0 = 0 is determined. Here, the derivation process of the first-order harmonic balance method is given. For the first-order harmonic balance, letting i = 1, equations (11)–(13) become





Therefore, equation (9) becomes
The algebraic equations (29)–(31) are solved by the pseudo-arc-length continuation method. Thus, the amplitude–frequency response curves are obtained. The amplitude of the body displacement response (x1) and the tire displacement response (x3) is calculated by

Parameter values of 2-degree-of-freedom quarter-vehicle.
Parameter values of inerter nonlinear energy sink and oblique spring.
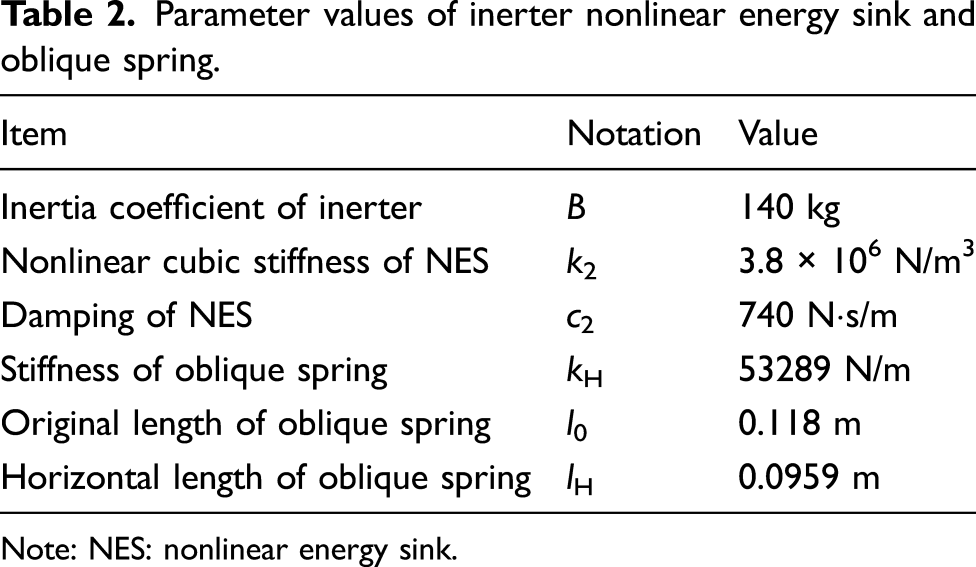
Note: NES: nonlinear energy sink.
Modified parameters.
Note: NES: nonlinear energy sink.
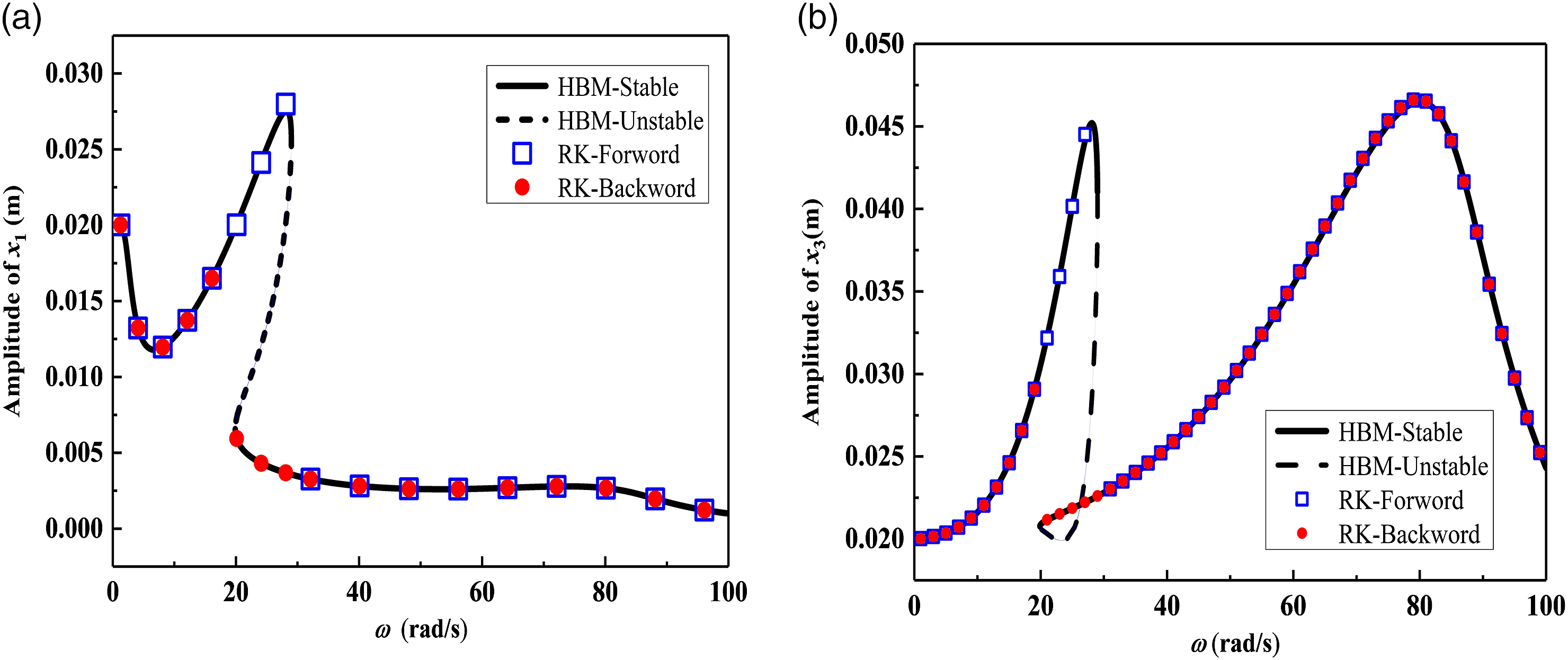
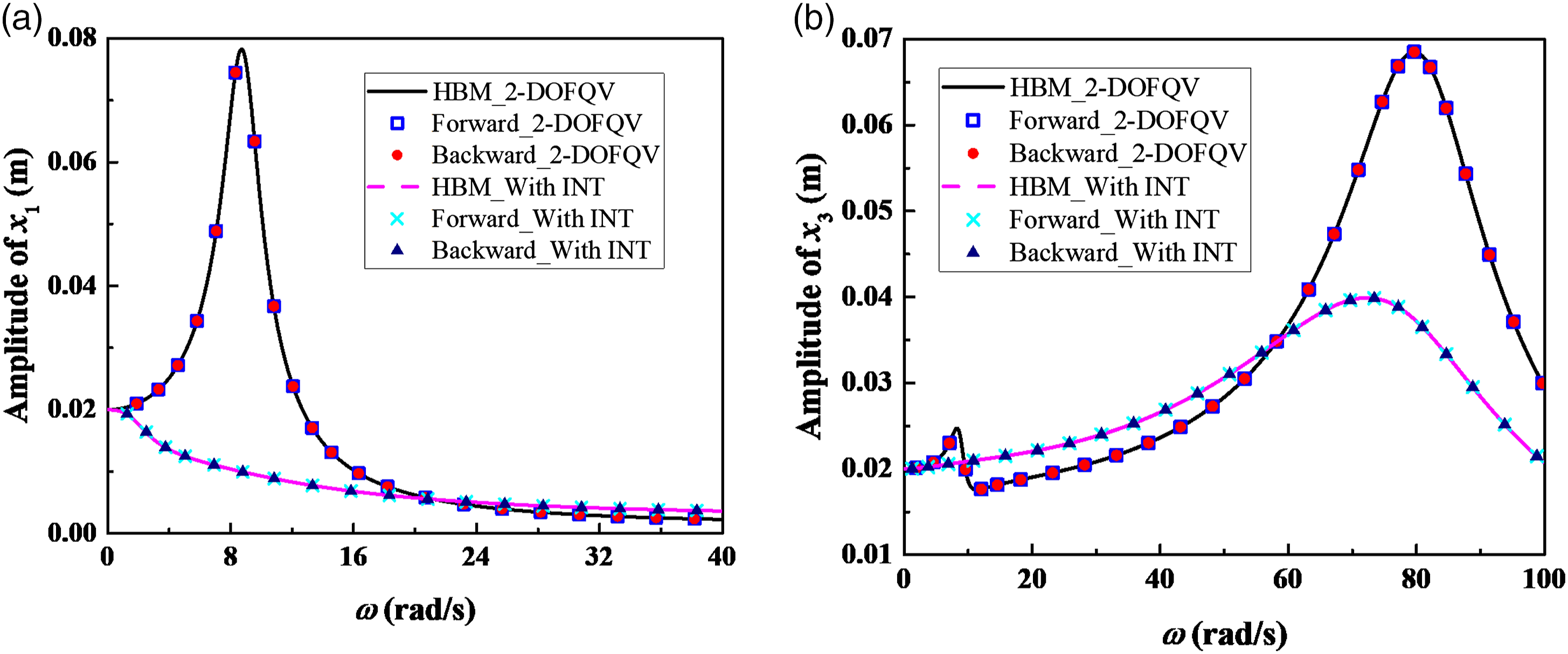
Comparison of the amplitude–frequency curves of the new suspension system based on the HBM and the Runge–Kutta method based on Table 3: (a) the body and (b) the tire. Note: HBM: harmonic balance method.
3. Evaluation index
The body amplitude and body acceleration are important evaluation indexes to measure the riding comfort. The vibration isolation frequency band of the suspension system can be known by body acceleration transmissibility T1
Dynamic tire load Fd is the force between the tire and the ground; it is an important evaluation index to measure handling stability. The smaller the dynamic load of the tire, the better the handling stability
Therefore, based on the following four aspects of the body amplitude, body acceleration, body acceleration transmissibility, and dynamic tire load, the vehicle riding comfort and handling stability are evaluated.
4. Comparison of the four suspension systems
The system parameters are selected as shown in Tables 1 and 2. Road excitation amplitude is A = 0.02 m. The frequency characteristics of the body amplitude, body acceleration, body acceleration transmissibility, and dynamic tire load are shown in Figure 4. (a) Body amplitude–frequency response, (b) body acceleration–frequency response, (c) body acceleration transmissibility–frequency response, and (d) dynamic tire load–frequency response.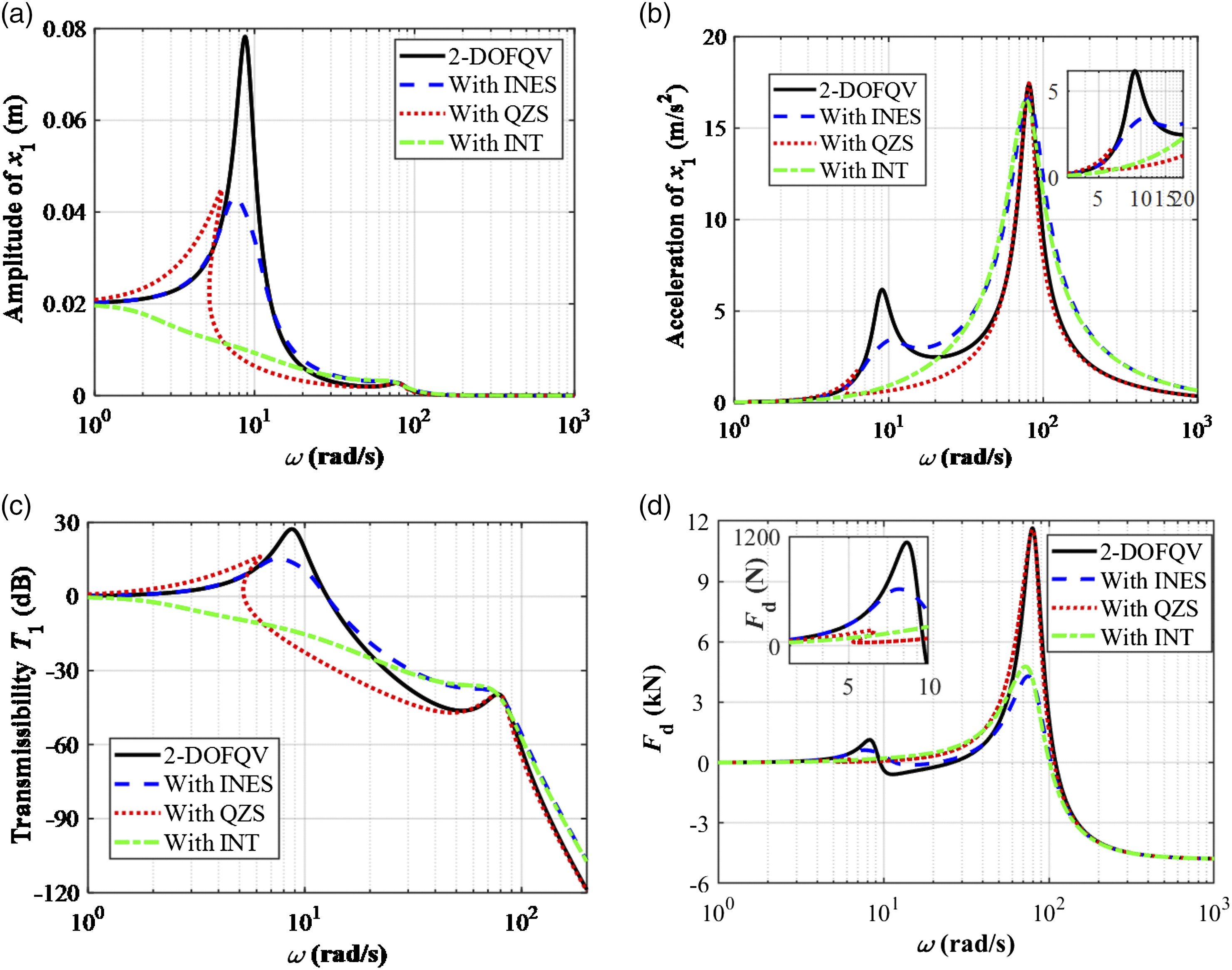
As can be seen from Figure 4(a), without the inerter-NES, the QZS (with QZS) reduces the first-order resonance frequency of the system. Without the QZS, the inerter-NES (with INES) significantly reduces the first-order resonant peak of the system. By integrating the QZS and inerter-NES together (with INT), the first-order resonance frequency and peak are reduced simultaneously. Figure 4(b) shows that both the QZS and inerter-NES have a good inhibitory effect on the body acceleration at the low-frequency band. Both of them work together to eliminate the first resonant peak of the system. Figure 4(c) demonstrates that the QZS widens the vibration isolation frequency band, and inerter-NES reduces the peak value of body acceleration transmissibility; both of them work together to achieve full-frequency vibration isolation of the body acceleration. Figure 4(d) shows that with QZS can reduce the first-order resonance frequency. With INES can reduce the second-order resonant peak of dynamic tire load. It is interesting to find that the new suspension system can not only improve riding comfort but also enhance handling stability. At the same time, it can also be seen that when the first resonant frequency of the system is reduced, the QZS will also cause the hardening characteristic phenomenon of the system, which will disappear when the inerter-NES is introduced.
5. Analysis for the different parameters of the new suspension system
5.1. Effect of the damping
As can be seen from Figure 5, with the increase in damping, the first-order resonant peak of body amplitude, body acceleration, and body acceleration transmissibility decreases gradually; the first- and second-order resonant peaks of dynamic tire load decrease gradually. Effects of damping on (a) body amplitude–frequency response, (b) body acceleration–frequency response, (c) body acceleration transmissibility–frequency response, and (d) dynamic tire load–frequency response.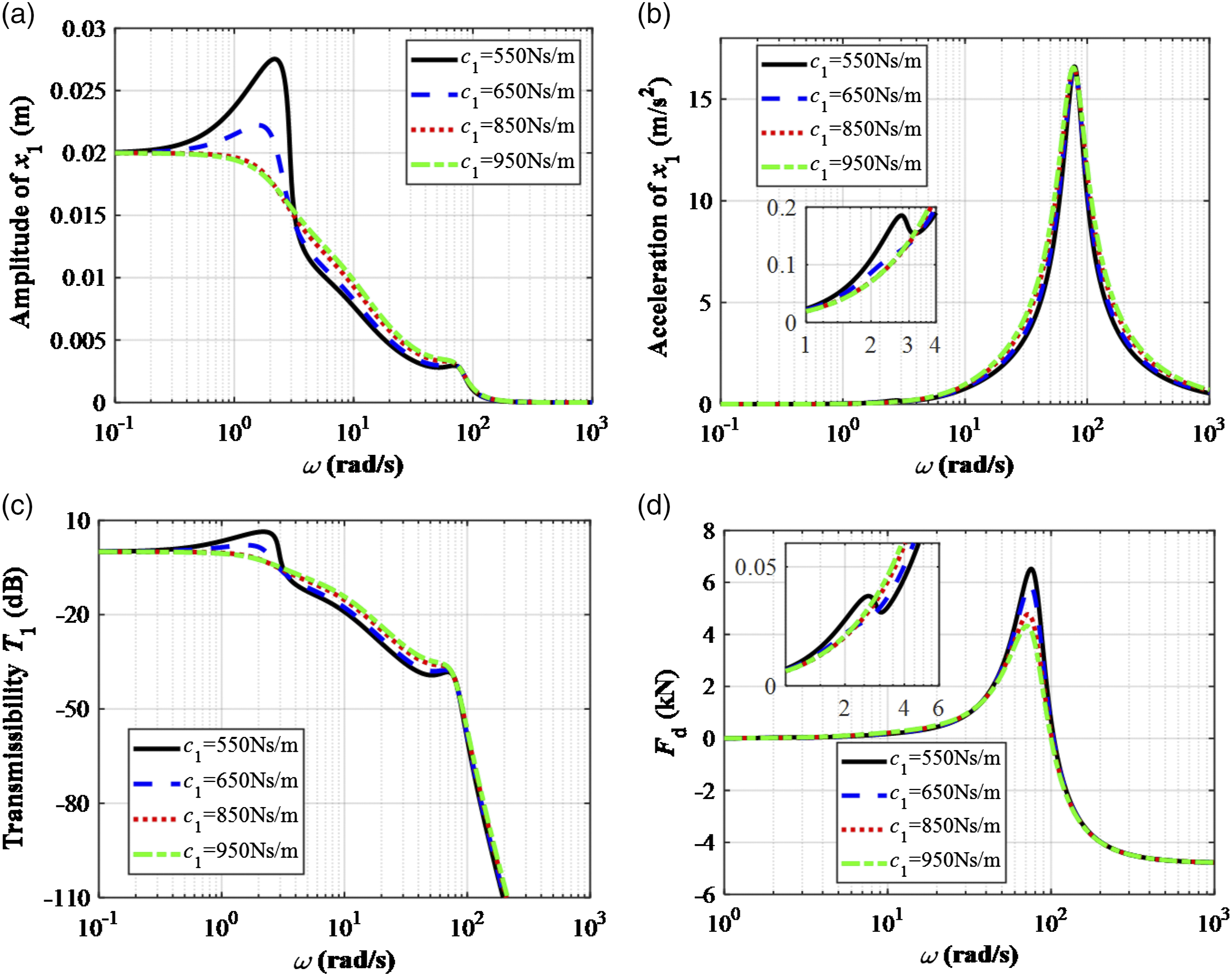
5.2. Effect of the inertia coefficient
As the inertia coefficient gradually increases, Figure 6(a) shows that the first resonant peak of the body amplitude gradually decreases. Figure 6(b) and (c) illustrates that the body acceleration is almost unchanged in the frequency domain. However, the body acceleration transmissibility decreases gradually at the first resonant peak of the system. Figure 6(d) shows that the dynamic tire load gradually decreases. In other words, with the increase of the inertia coefficient, the vehicle riding comfort and handling stability are improved. Effects of the inertia coefficient on (a) body amplitude–frequency response, (b) body acceleration–frequency response, (c) body acceleration transmissibility–frequency response, and (d) dynamic tire load–frequency response.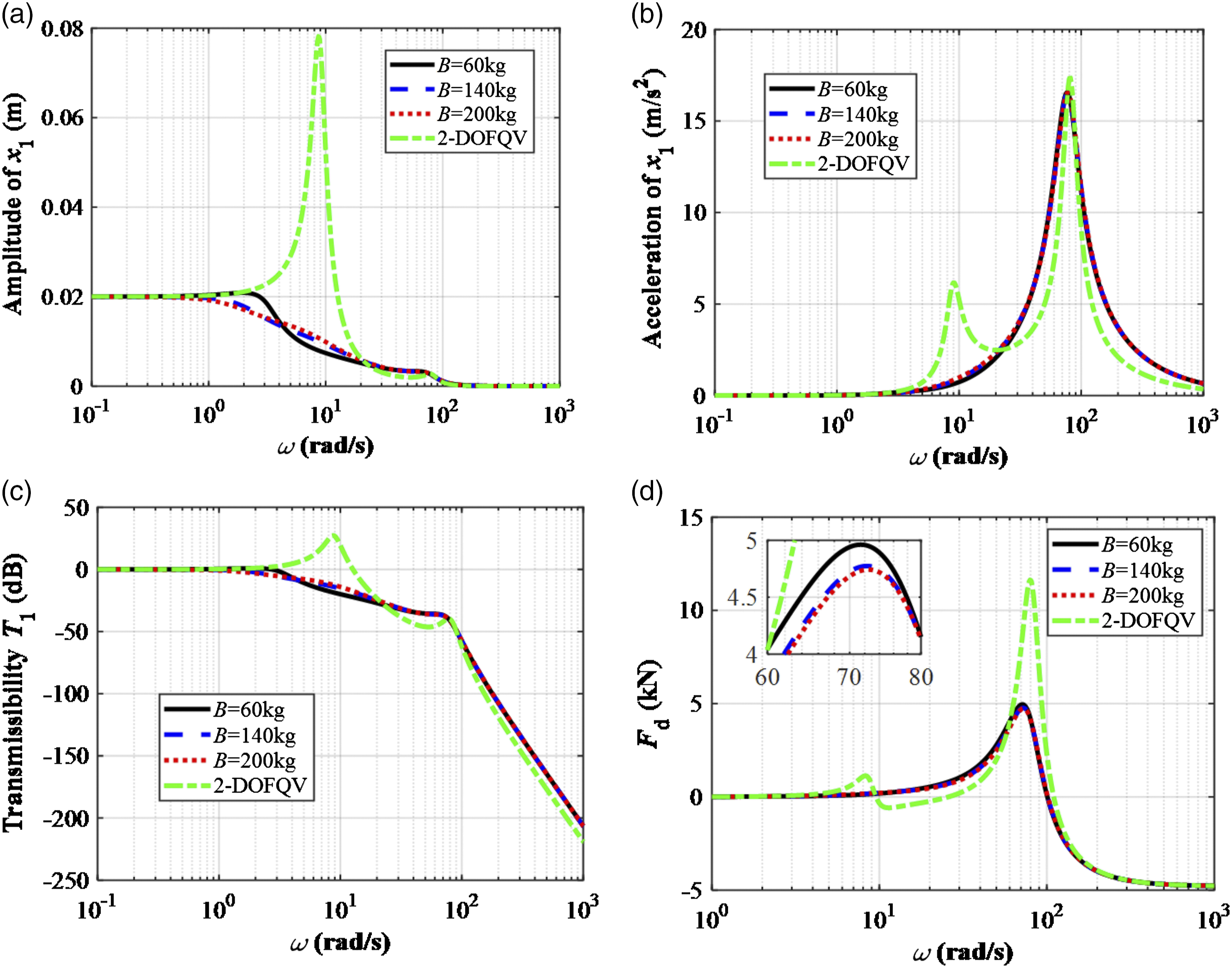
5.3. Effect of NES nonlinear stiffness
As shown in Figure 7, with the increase in NES cubic stiffness, body amplitude, body acceleration, and body acceleration transmissibility will improve slightly, but dynamic load of the tire will decrease slightly. When the nonlinear stiffness increases to a certain value, a new formant will be excited between the first- and second-order resonant frequencies of the system and the hardening characteristic of bending to the right will occur near the formant, which will lead poor riding comfort and handling stability. Effects of nonlinear energy sink nonlinear stiffness on (a) body amplitude–frequency response, (b) body acceleration–frequency response, (c) body acceleration transmissibility–frequency response, and (d) dynamic tire load–frequency response.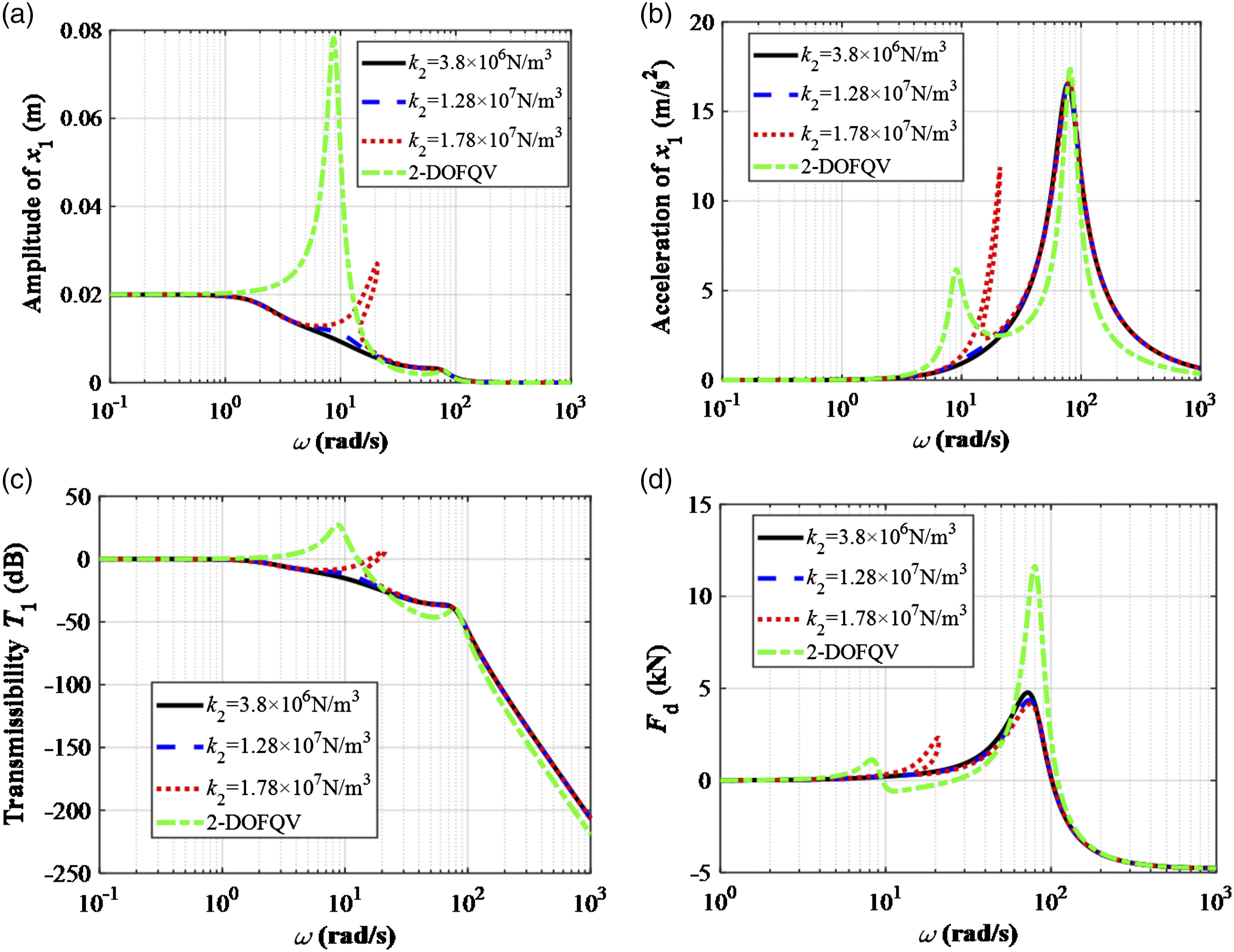
5.4. Effect of road excitation amplitude
Figure 8 shows that with the increase in the road excitation amplitude, the body amplitude, body acceleration, body acceleration transmissibility, and dynamic tire load increase gradually. When the road excitation amplitude increases to a certain value, a new formant will be inspired between the first-order and second-order resonance frequencies of the system and the hardening nonlinear characteristic of bending to the right will occur near the formant; the vehicle riding comfort and handling stability become worse. Effects of excitation amplitude on (a) body amplitude–frequency response, (b) body acceleration–frequency response, (c) body acceleration transmissibility–frequency response, and (d) dynamic tire load–frequency response.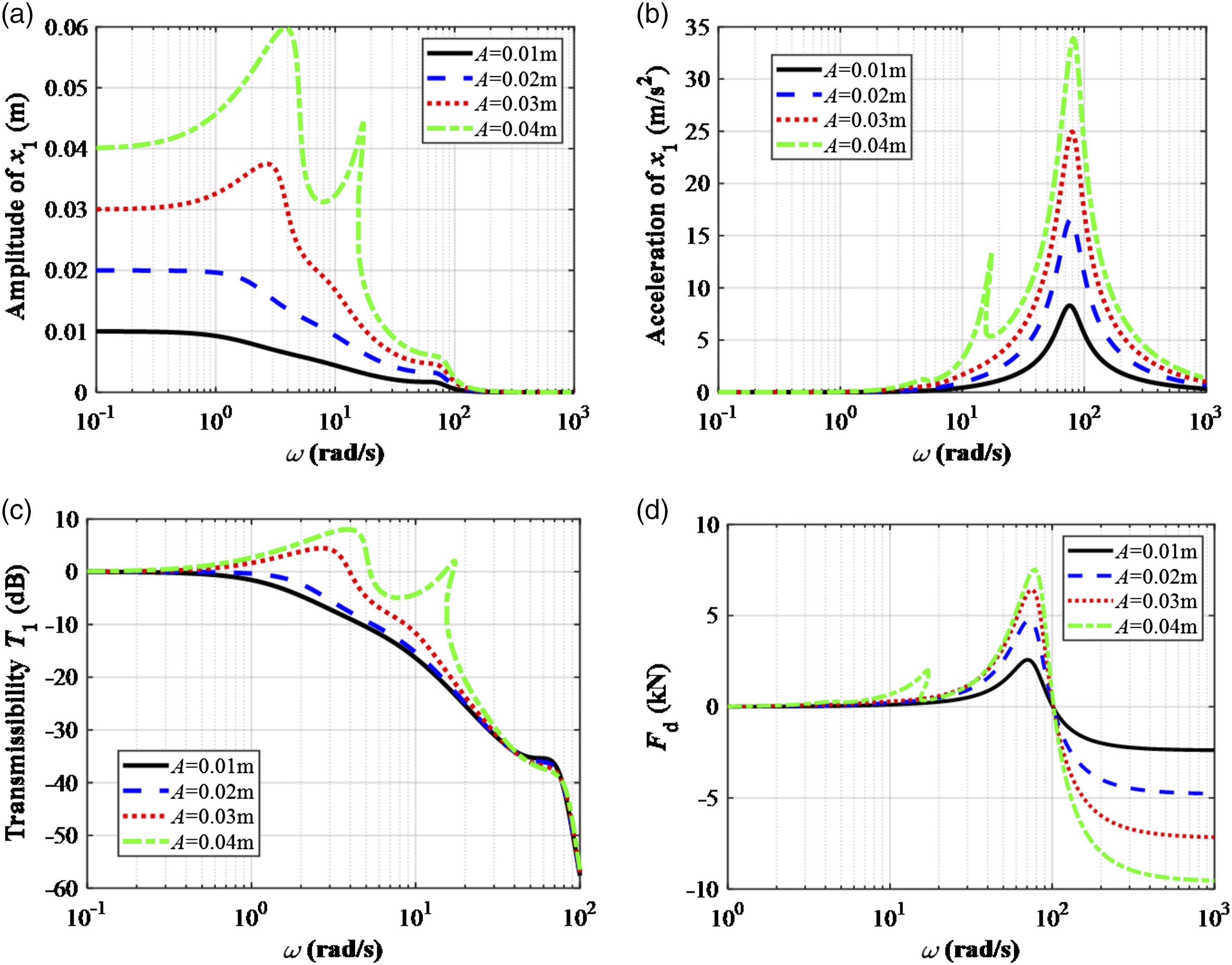
6. Discussion
Because of manufacturing and installation errors, the isolator may not reach the condition of QZS. At this time, the vertical restoring force of the oblique spring k2 and suspension spring k1 is no longer the form of pure cubic stiffness but the combination of linear stiffness and cubic stiffness. For the convenience of analysis, only the influence of the stiffness error of the oblique spring k2 on the system is considered, other parameters of the system are shown in Tables 1 and 2. As can been seen from Figure 9, the isolator has good robustness. Effects of oblique spring stiffness on (a) body amplitude–frequency response, (b) body acceleration–frequency response, (c) body acceleration transmissibility–frequency response, and (d) dynamic tire load–frequency response.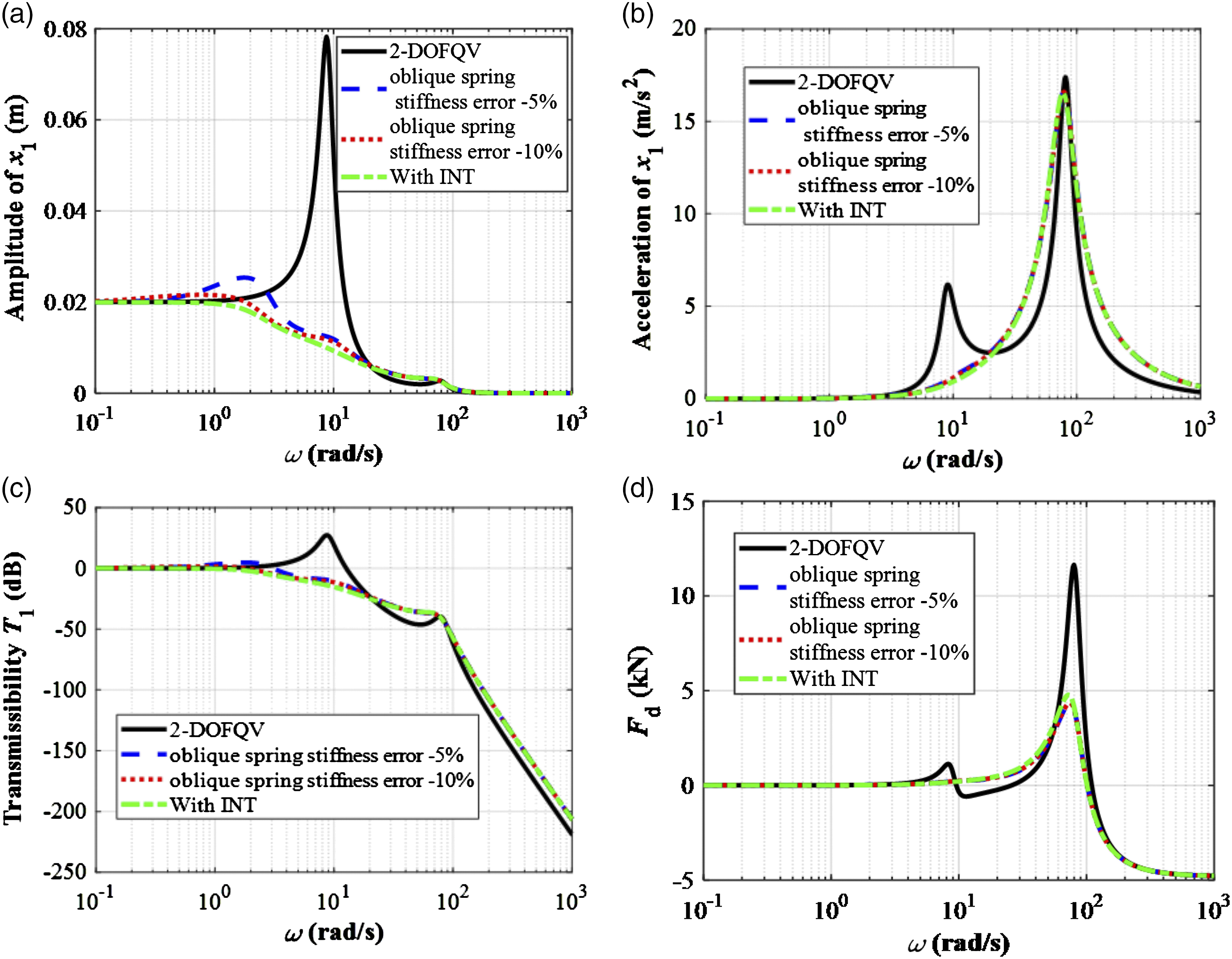
7. Conclusion
In this article, the QZS characteristics and inerter NES are applied to the 2-degree-of-freedom quarter-vehicle model. A new vibration control scheme of the vehicle suspension system is proposed. The nonlinear governing equations are derived. The approximate analytical solution of the new suspension system is obtained by the harmonic balance method and validated by the numerical method. The vehicle body amplitude, body acceleration, body acceleration transmissibility, and dynamic tire load are taken as the evaluation indexes of vehicle riding comfort and handling stability. The effects of damping of the suspension system, the parameters of the inerter NES, and the road excitation amplitude on the vehicle riding comfort and handling stability are studied in detail. The following main conclusions are drawn.
The inerter can reduce dramatically the mass required for the NES, and with the increase of the inertia coefficient, the vibration suppression efficiency gradually increases.
The QZS isolator can reduce the first resonant frequency of the system and widen the isolation frequency band. However, it may cause the hardening characteristic nonlinear phenomenon, which will disappear when the inerter NES is added.
The inerter NES can absorb vibration effectively and reduce the resonant peak. The hardening nonlinear characteristic of bending to the right will occur near the resonance peak, which will lead to poor riding comfort and handling stability.
The new suspension system can improve riding comfort and handling stability at the same time.
Footnotes
Acknowledgements
The authors would wish to thank anonymous reviewers for their incredible and careful review.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors gratefully acknowledge the support of the National Natural Science Foundation of China (Nos. 11772181 and 11422214), the Program of Shanghai Municipal Education Commission (Nos. 17SG38 and 2019-01-07-00-09-E00018), and the Key Research Projects of Shanghai Science and Technology Commission (No. 18010500100).