
Abstract
Complex disturbances with multifrequency components inevitably exist in the attitude control system of flexible spacecrafts. Multirate iterative learning disturbance observer (MILDO) is a promising solution to estimate and attenuate these disturbances much more accurately. However, measurement delay in the attitude measurement system may severely degrade the estimation performance of MILDO and even lead to instability of the control system. To suppress complex disturbances of flexible spacecrafts subject to a known measurement delay, a delay compensation-MILDO (DC-MILDO) is proposed in this study. First, an augmented model is constructed for the delayed disturbance by introducing slowly varying disturbance, multiple periodic disturbances, and the integral of the lumped disturbance as states. Then, a virtual measurement of the system is built by realigning the control torques with the delayed measurements in spacecraft attitude dynamics. According to the augmented model and the virtual measurement, a modified MILDO is designed by using multiple iterative learning structures. Based on the estimates of the modified MILDO, the lumped disturbance at current instant can be predicted by compensating time delay in the multifrequency components. Subsequently, a composite controller for flexible spacecraft is built by combining DC-MILDO with a robust controller based on Lyapunov–Krasovskii approach. Simulation results demonstrate the effectiveness of the proposed controller.
1. Introduction
To accomplish complex space missions, various precision instruments are installed on spacecrafts, such as cameras, telescopes, laser transceivers, etc. Because these instruments are typically very susceptible to platform vibrations, high accuracy and high stability attitude control of spacecraft platforms are the basic requirements for them (Dennehy and Alvarez-Salazar, 2018). However, complex disturbances in the system may cause degradation of attitude control performance and even lead to instability of the system (Hu and Xiao, 2011; Qiao et al., 2019; Yan and Wu, 2019). Therefore, attenuation of complex disturbances is a primary task for spacecraft attitude controller design.
Generally, spacecrafts in orbit are affected by complex disturbances containing wide range of components in frequency. Environmental disturbances, vibrations from flexible appendages, uncertainties of inertial parameters, and output-torque errors of actuators mainly consist of slowly varying components and have been sufficiently studied (Song and Lu, 2019; Yan and Wu, 2017). Besides, there are internal periodic disturbances from equipment onboard, such as cryocoolers, drive motors, reaction wheels, etc (Liu et al., 2015). These disturbances also have significant adverse effects on the spacecraft attitude control.
To deal with complex disturbances of spacecrafts, different control schemes have been applied (Liu et al., 2012; Majumder and Patre, 2019; Zhang et al., 2014). Among them, disturbance observer-based control scheme (DOBC) is a potential solution (Chen et al., 2016; Guo and Chen, 2005; Liu et al., 2018). In DOBC, by integrating a disturbance observer with traditional controllers, the disturbance attenuation performance can be significantly improved whereas maintaining the nominal performance of baseline controllers (Back and Shim, 2008; Yang et al., 2011). However, traditional disturbance observers, such as nonlinear disturbance observer (Chen and Wen, 2018), extended disturbance observer (Li et al., 2019), and sliding mode disturbance observer (Yan and Wu, 2018) are mainly applied to estimate slowly varying disturbance. Recently, a multirate iterative learning disturbance observer (MILDO) is proposed to address multiple periodic disturbances as well as slowly varying disturbance (He and Wu, 2020). However, measurement delay is not fully considered in the observer design. It may lead to performance reduction and instability of the control system (Richard, 2003).
In practice, the acquisition of spacecraft attitude information is unavoidably affected by time delay. It typically arises from output delay of sensors, signal processing and transmission, and also in attitude determination (Bahrami and Namvar, 2015; Zhang et al., 2013; Zhu et al., 2018). The delay-robust controller design based on Lyapunov–Krasovskii approach has been adequately addressed and theoretical foundation has been provided (Ailon et al., 2003; Chunodkar and Akella, 2011). However, conservativeness of these controllers may be increased when significant disturbances exist. Alternatively, Smith predictor (García and Albertos, 2013) or communication disturbance observer Wang et al. (2018) can be applied by treating time delay as part of the disturbance. However, only slowly varying disturbance together with the small delay can be dealt with by these approaches.
Observers robust to time delay can be designed based on Lyapunov–Krasovskii theories (Cacace et al., 2010). The stability of observers can be guaranteed by choosing observer gains inside a conservative area (Qiao et al., 2019). Thus, the estimation performance is actually restricted. Besides, chain observers can be applied to reconstruct system states subject to large time delay (Kahelras et al., 2018). Nevertheless, the complexity of observer structure may not fully meet the demand of the spacecraft attitude control system with limited computing power. Due to these facts, disturbance observer for complex disturbance estimation of spacecraft subject to measurement delay still needs investigation.
For high performance attitude stabilization of a flexible spacecraft in the presence of a known measurement delay, a delay compensation-MILDO (DC-MILDO)-based robust composite controller is designed. First, an augmented model for delayed disturbance including slowly varying disturbance together with multiple periodic disturbances is constructed. The control torques and the delayed angular velocity measurements are realigned to fabricate the virtual disturbance measurement. Based on it, a modified MILDO is built to estimate the delayed disturbances. In the observer, disturbances with different frequency components are estimated separately. Then, the disturbance estimates of current instant are obtained by compensating time delay according to the disturbance frequencies. Second, DC-MILDO is combined with a robust controller to stabilize the spacecraft attitude dynamics. Furthermore, simulations are carried out to verify the effectiveness of proposed control scheme.
The main contributions of this work are described as follows A MILDO with delay compensation, which consists of a modified MILDO and a prediction algorithm, is proposed to achieve accurate estimation of complex disturbances for flexible spacecrafts with measurement delay. A composite controller combining the DC-MILDO with a robust controller is proposed to realize high-precision attitude stabilization for flexible spacecrafts in the presence of measurement delay and complex disturbances.
This study is organized as follows: The spacecraft dynamics is introduced in Section 2. In Section 3, the DC-MILDO is constructed and analyzed. Then, a DC-MILDO-based controller is built in Section 4. Afterward, simulation results are presented in Section 5. At last, a conclusion is given in Section 6.
2. Mathematical model
2.1. Notations
In this study,
2.2. Spacecraft attitude dynamics
Because modified Rodrigues parameter (MRP) is a singularity-free unique global attitude description, we are using MRP to describe the attitude orientation of a spacecraft with respect to the inertial frame. Then, the spacecraft kinematics is described as (Hughes, 2004)

By using


2.3. Disturbances and measurement delay
Spacecraft vibration test results show that the attitude vibrations cover a wide range of frequency components. However, the low-frequency vibrations are dominant in energy. Besides, there are several significant periodic vibrations. Because high-frequency vibrations are generally damped or suppressed by isolation equipment onboard, their energy is relatively low. As a result, the major sources of the spacecraft attitude vibrations are the slowly varying disturbances and period disturbances (Jedrich et al., 2002; Sudey and Schulman, 1984; Toyoshima et al., 2010). These disturbances can be further described according to their sources as follows.
The environmental disturbance
Actually, there are also significant internal periodic disturbances
Following Sun et al. (2017), abovementioned disturbances are lumped into a total disturbance

Based on the analysis above, the following assumption is given for the lumped disturbance
The lumped disturbance
There is no control over the initial condition time interval, that is, In addition, because the attitude measurement is affected by the quality of sensors, signal transmission, and attitude determination algorithm utilized in the system, the obtained attitude information is generally time delayed. When the angular velocity and attitude information are aligned to be synchronous in the attitude determination system, the attitude measurement output is described as (Chunodkar and Akella, 2011) Because the delay time

Time delay
3. MILDO with delay compensation
To obtain accurate estimates of the abovementioned disturbances in the presence of measurement delay, a DC-MILDO is built in this section.
3.1. Delayed disturbance model
According to Assumption 1, the lumped disturbance

where the fundamental frequency of
For periodic disturbances

Then, an integral state

By defining

Considering that
3.2. Modified MILDO
A modified MILDO for delayed disturbance is then designed in Theorem 1 following method in He and Wu (2020) as follows.
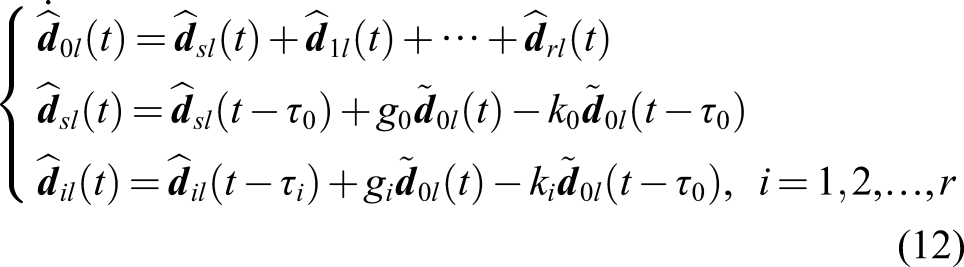
For the system (9), the modified MILDO is designed as The stability analysis of observer (12) is given in Appendix 1.

According to (31) in Appendix 1, the unmodeled disturbance
Because not only the slowly varying disturbance but also the periodic disturbances are modeled in (9), the estimation performance of observer (10) is not just determined by the observer bandwidth. Accurate estimation of periodic disturbance is achieved in limited bandwidth by adopting iterative learning technique.
In observer (10), By defining The estimate of Because

3.3. Estimation performance and delay compensation
According to equations (12) and (13), the disturbance estimation error can be described in s-domain as follows
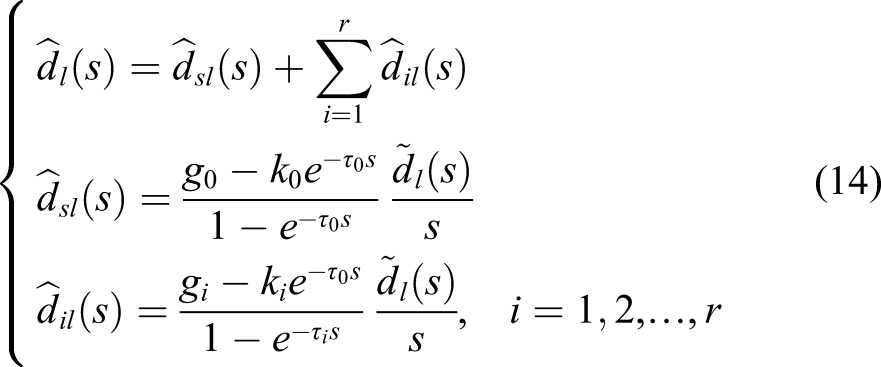
We define

Substituting equation (15) into (14) and rearranging, we have

Because
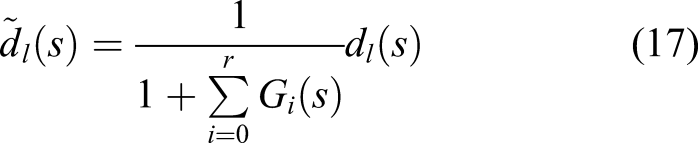
Then, the transfer function from
For periodic disturbances with frequencies
For slowly varying disturbance, it can be derived that
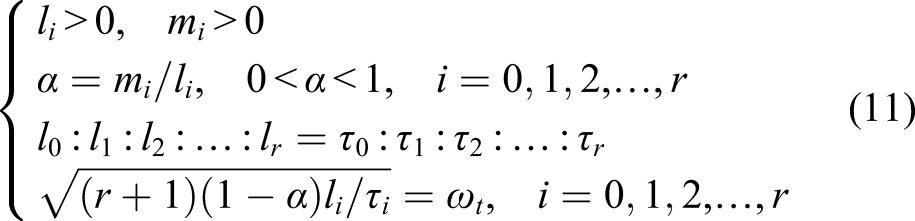
According to equation (11),
Based on the analysis above, the estimates of slowly varying disturbance and periodic disturbances are given by
Noted that the delays of periodic disturbances are compensated, the total disturbance compensation error of current instant is derived as
In view of Assumption 1 and equation (31), we have
It should be noted that small deviation between the obtained
The conventional MILDO is redesigned into the form of (10) and (11) for realizing the separated estimates of the components for the slowly varying disturbance and periodic disturbances which is the basis of the prediction algorithm (19).
4. DC-MILDO-based robust composite controller
To stabilize the spacecraft attitude system with robustness to delayed state feedback, a DC-MILDO-based robust composite controller is designed following Lyapunov–Krasovskii approach (Chunodkar and Akella, 2011; Samiei and Butcher, 2013).
For the simplicity of controller design, the spacecraft system (1) and (4) can be rewritten as
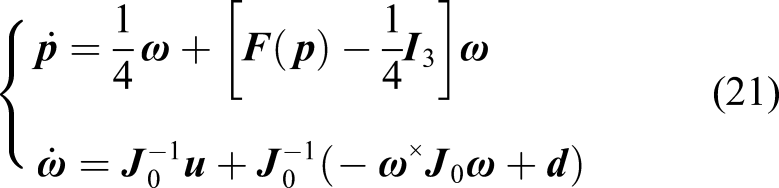
Consider a controller as follows

Then, by defining

where
The nonlinear term

For the spacecraft system (23) with complex disturbances and measurement delay

See Appendix 2.
According to equation (46), the bounded area of system states is enlarged by the disturbance estimation error. When significant disturbances exist, the spacecraft attitude control performance will be reduced. With the help of DC-MILDO, most of the disturbances can be accurately compensated. Consequently, the conservativeness of the feedback controller can be reduced. It is noted that the computation consumption of the designed approach may be slightly increased by the extra observer. Nevertheless, it is acceptable considering the simplicity of the observer and the improvement of the attitude control performance.
5. Simulation results
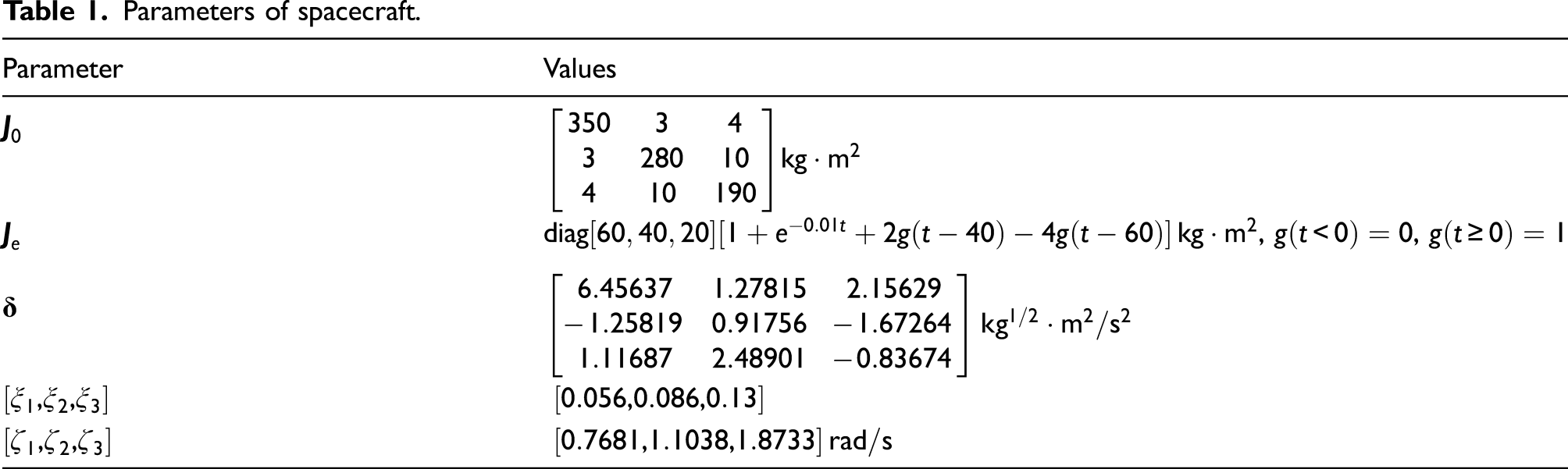
Parameters of spacecraft.
Disturbances.

5.1. Attitude stabilization performance
Control performance of the robust controller EDOBC and DC-MILDOBC.
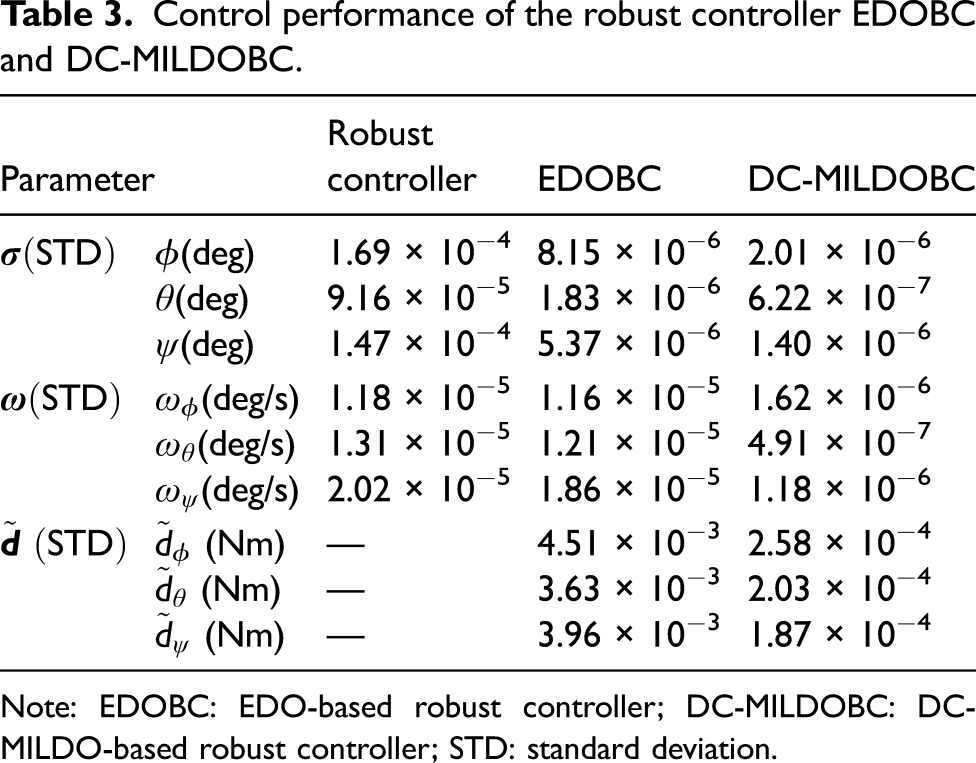
Note: EDOBC: EDO-based robust controller; DC-MILDOBC: DC-MILDO-based robust controller; STD: standard deviation.
As shown in Figure 1 and Table 3, the spacecraft attitude dynamics can be stabilized by the robust controller. Spacecraft attitude stabilization under robust controller without disturbance observer. (a) Euler angles; (b) angular velocities; (c) control torques.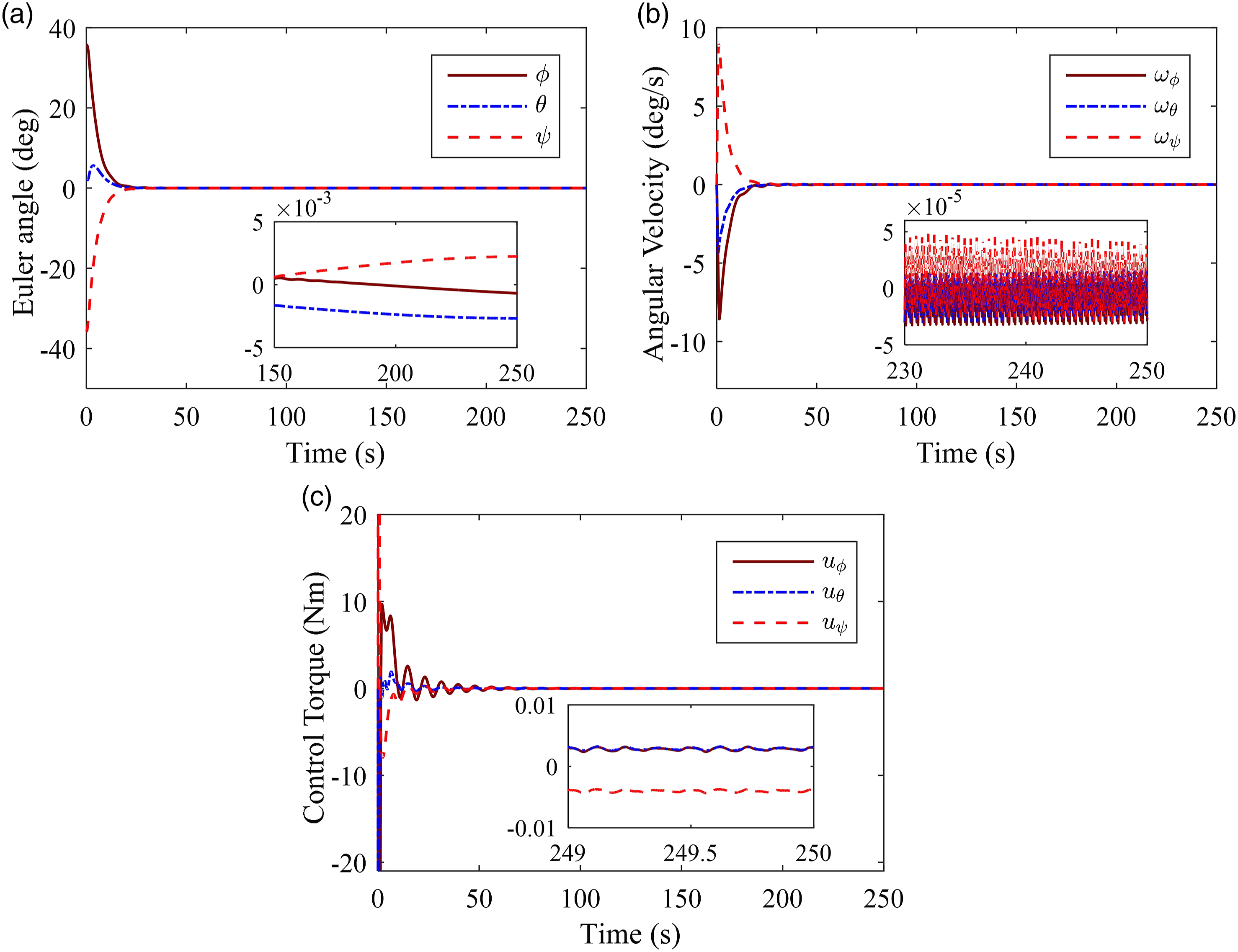
Conventional EDO and MILDO can be applied to suppress complex disturbances. However, large measurement delay will cause instability of them. Robust modification to observer gain matrix in Qiao et al. (2019) may be applied to EDO. Nevertheless, the stability of MILDO is not easy to achieve by simply regulating the gains of conventional MILDO. Therefore, we modify the bandwidth of EDO as 1 rad/s for tolerating the measurement delay and then introduce DC-MILDO for comparison.
The simulation results of EDOBC are given in Figure 2. As shown in Figure 2, Spacecraft attitude stabilization of EDO-based robust controller. (a) Euler angles; (b) angular velocities; (c) disturbance estimation errors; (d) control torques.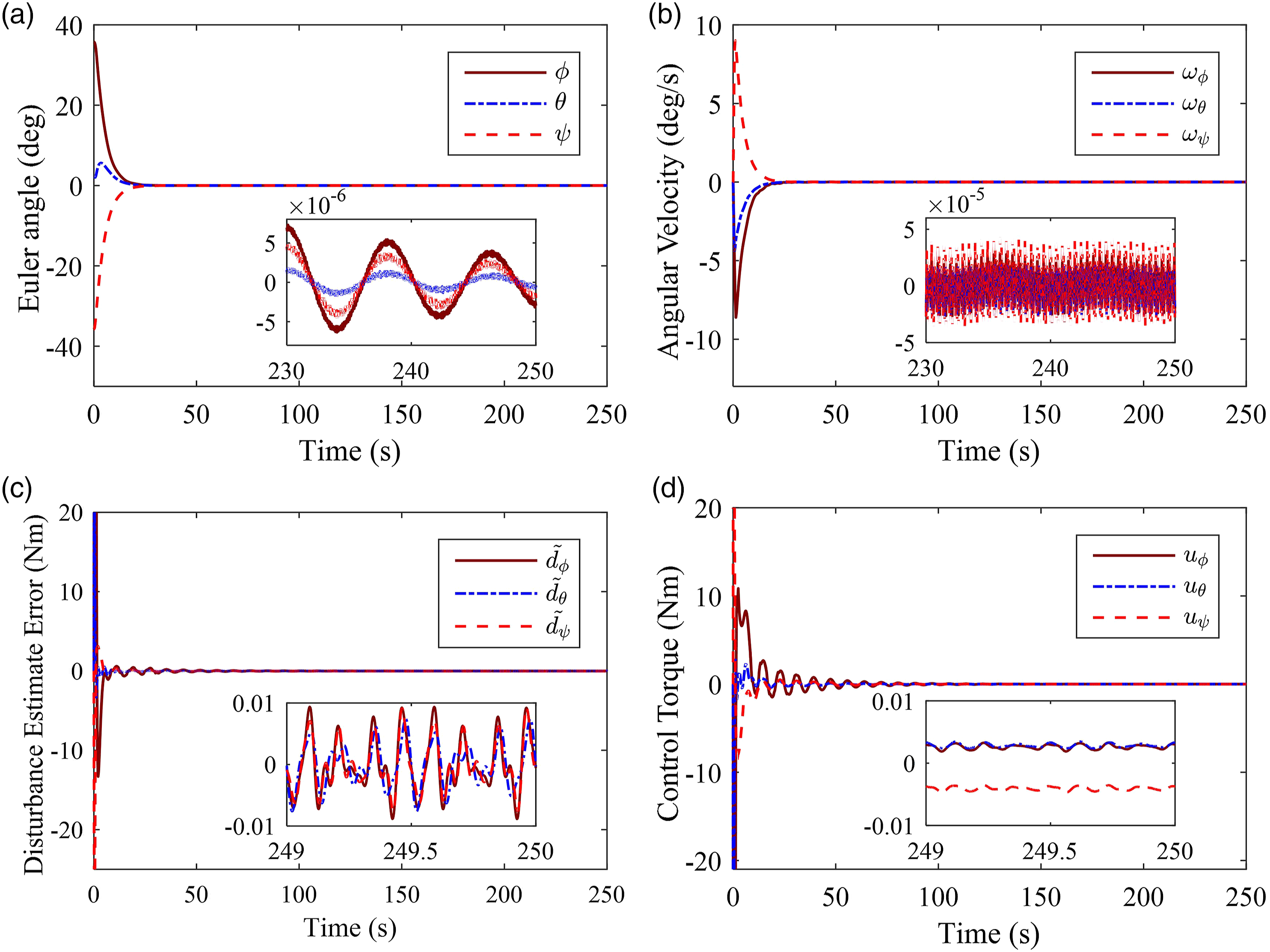
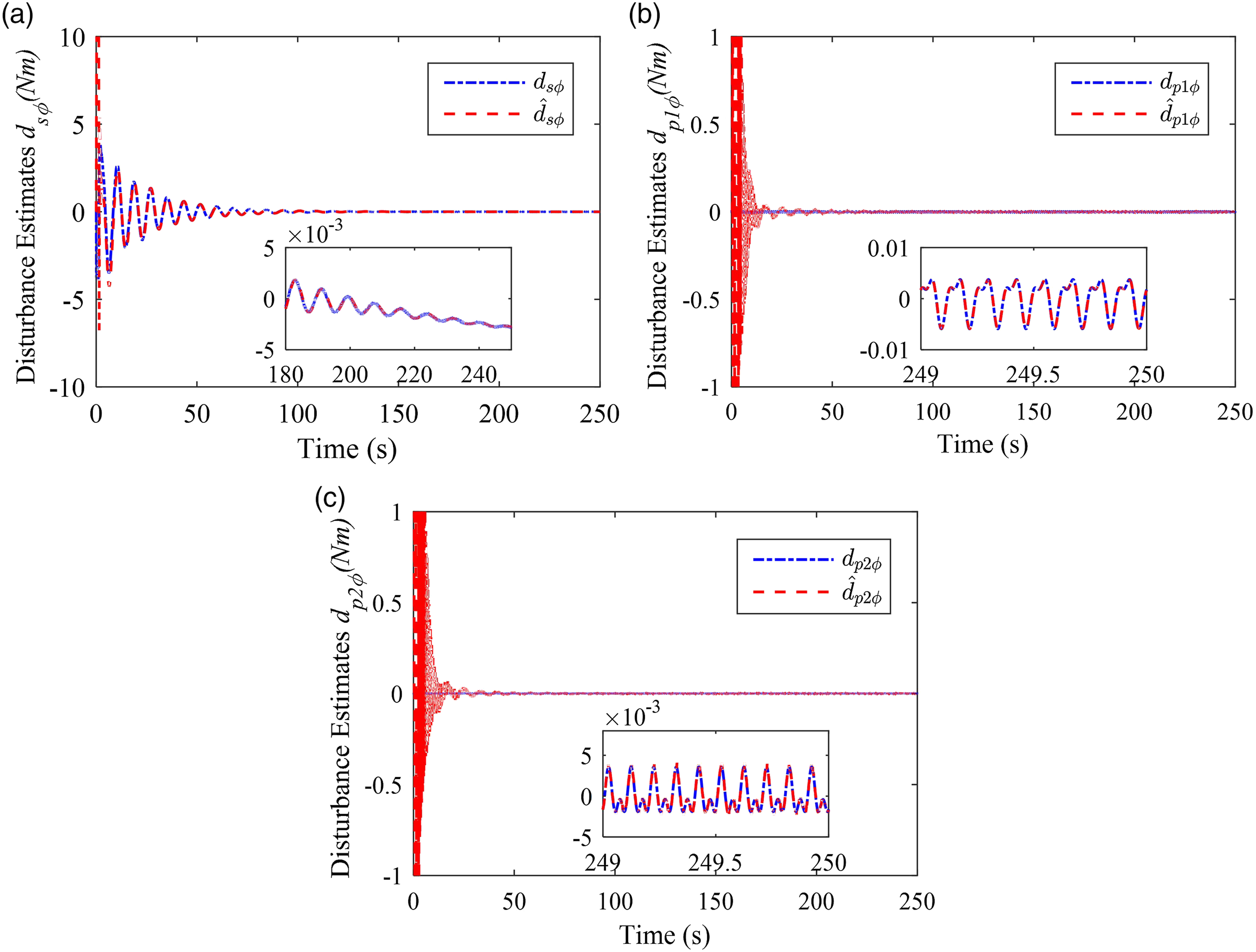
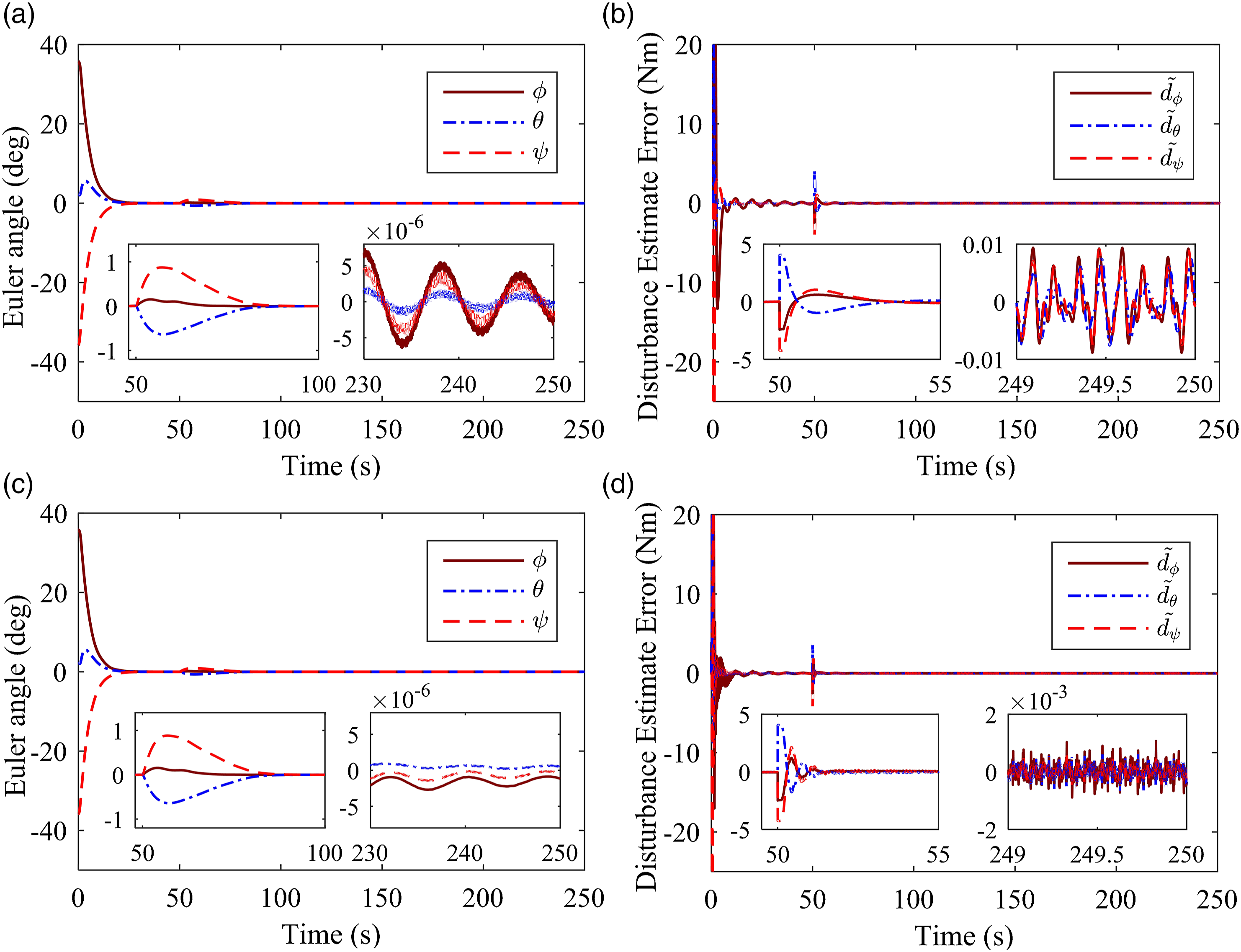
In Figures 3 and 4 and Table 3, the simulation results of DC-MILDOBC are given. As shown in Figure 3, Spacecraft attitude stabilization of DC-MILDO-based robust controller. (a) Euler angles; (b) angular velocities; (c) disturbance estimation errors; (d) control torques. Disturbance estimates of DC-MILDO-based robust controller. (a) 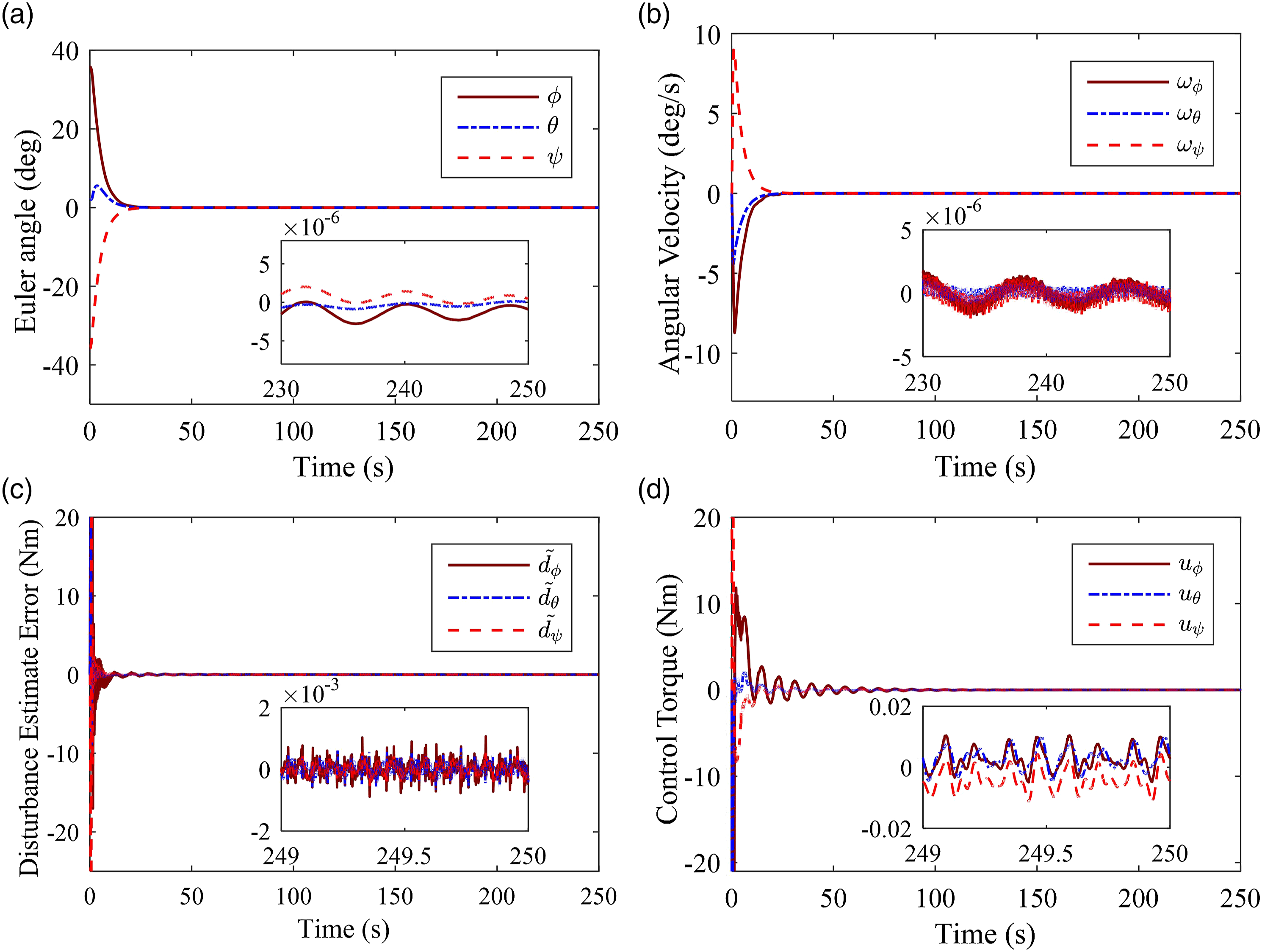
The improvement of the attitude stabilization via DC-MILDOBC relies on the accurate estimation and compensation of not only slowly varying disturbance but also of periodic disturbances. As shown in Figure 3(c), the disturbance estimation errors are reduced to 1 × 10−3 Nm. The STD of
5.2. Robustness to abrupt disturbances
The spacecrafts in orbit may also be affected by impacts of space debris or booting of an instrument onboard. To test the robustness of the designed approach to these disturbances, a strong abrupt disturbance Attitude control via robust controller in the presence of Attitude control in the presence of 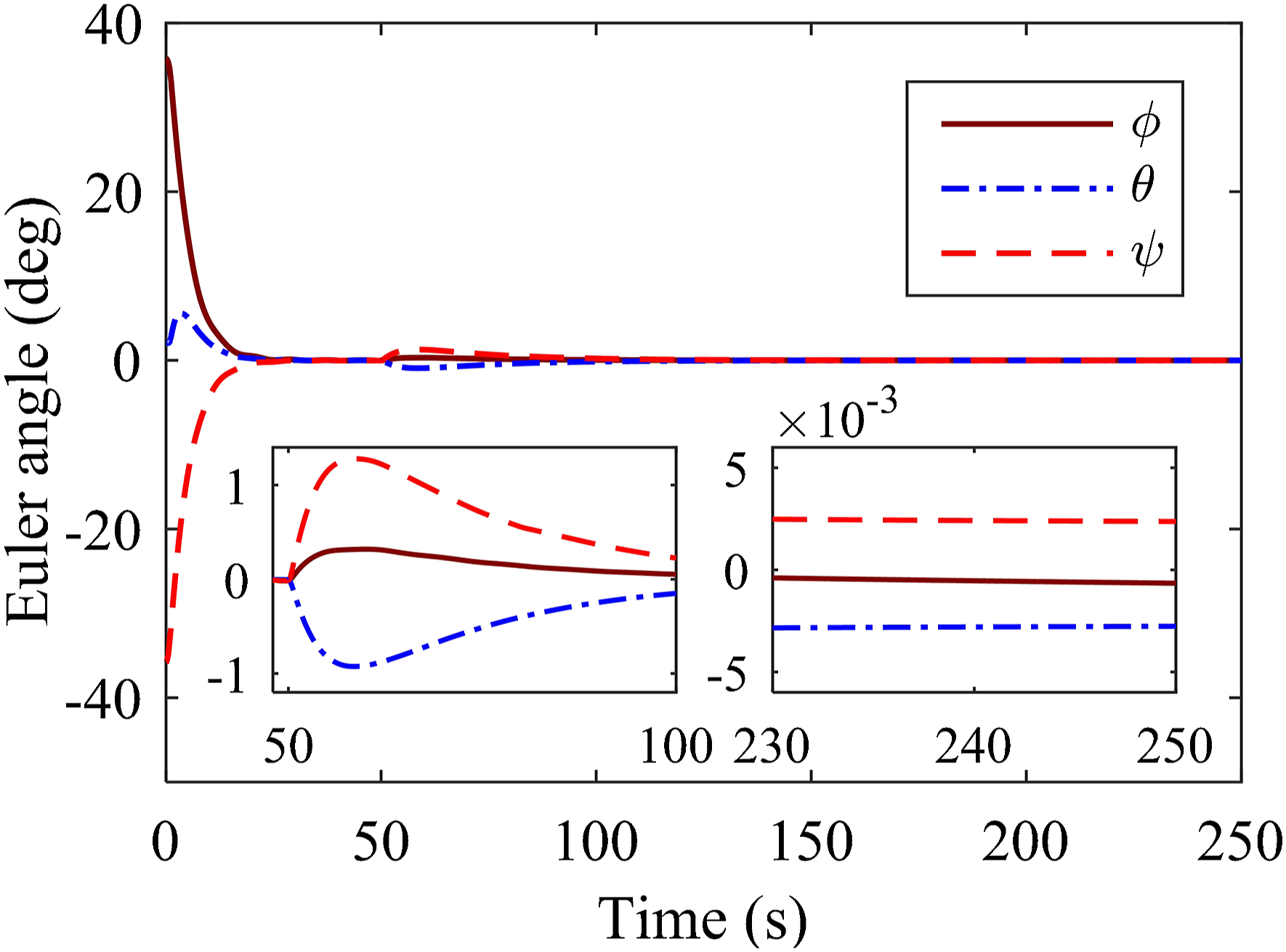
As shown in Figure 5, the abrupt disturbance
5.3. Robustness to identification error of the delay time
In this scenario, the robustness of the designed approach to small identification error of the delay time is tested. The obtained delay time Performance of delay compensation-MILDO in the presence of 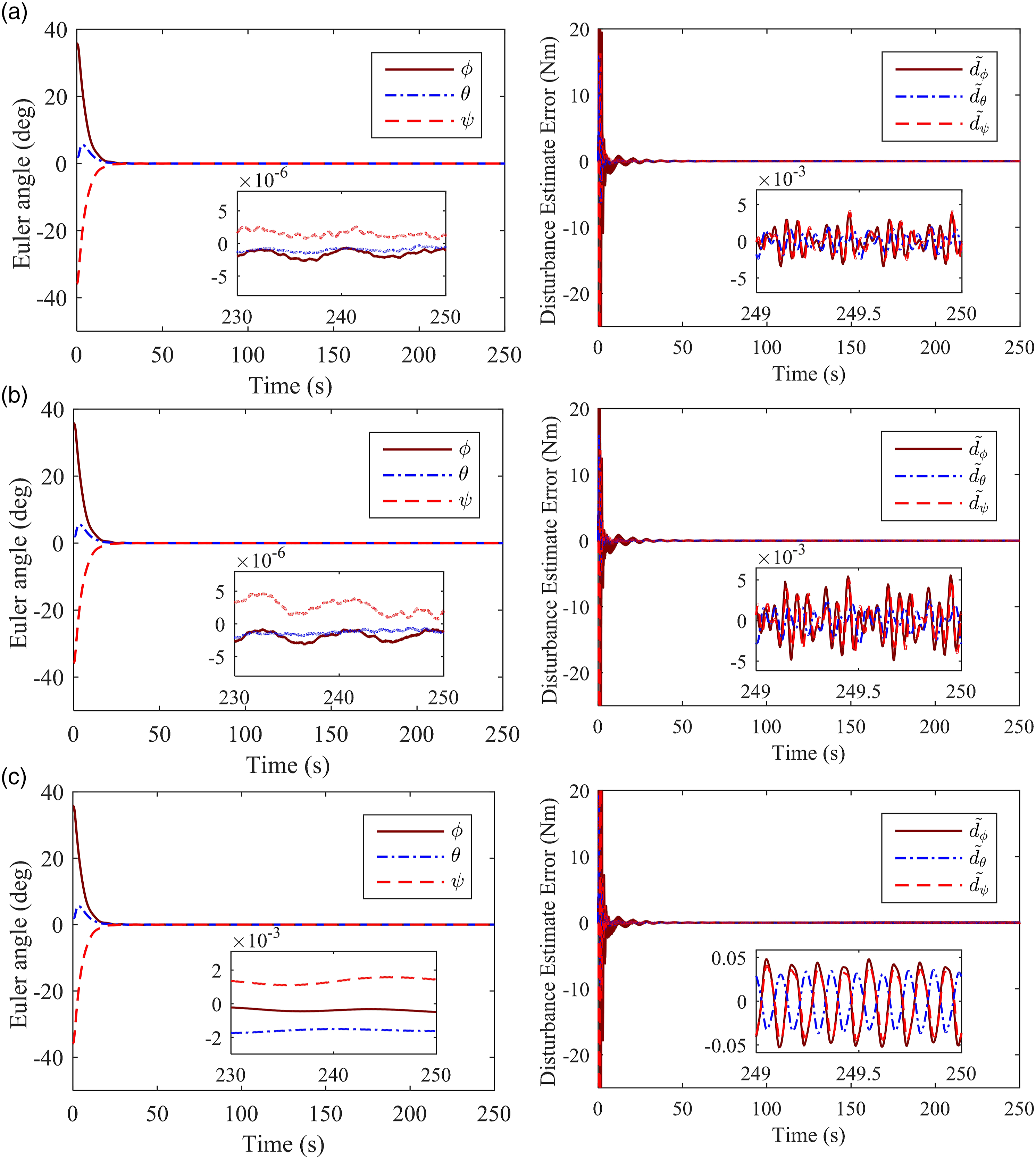
As shown in Figure 7(a) and (b), the disturbance estimation errors of DC-MILDO are slightly increased to
6. Conclusion
To suppress complex disturbances of flexible spacecrafts subject to measurement delay, a DC-MILDO-based composite controller is designed in this study. The designed observer is based on an augmented model of the delayed disturbances. A tuning rule for the observer gains is proposed to realize separated estimates of slowly varying disturbance and periodic disturbances. Then, a prediction algorithm is designed for obtaining the accurate disturbance estimation of current instant. To clarify the disturbance estimation performance, rigorous theoretical analysis is given in s-domain. By combining DC-MILDO with a robust controller, high performance attitude stabilization of a flexible spacecraft subject to complex disturbances and measurement delay is realized. Simulation results also indicate that the designed approach shows adequate robustness to the abrupt disturbances and small identification error of the delay time. In our future research, online delay identification technique may be combined with the designed approach for improving the robustness of the control system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.